
Lisa Almond FMS 2015. CFR 2014/15 Spring 2015 Tidying FMS users FMS Contents.
GPS & FMS Basics
Created: 14 Mar 2016Updated: 26 Mar 2016
T6BDriver.com
Objectives
• Be familiar with common GPS/FMS terms
• Understand the GPS Constellation and operation
• Understand RAIM and be able to verify proper RAIM indications
• Understand GPS receiver operations to include alignment & database verification
• Comprehend the specifications of the three flight phases of the FMS GPS
• Understand procedures and concepts associated with fly-over & fly-by waypoints
GPS Common Terms
• Active Waypoint – The waypoint to/from which navigational guidance is being provided
• Actual Navigational Performance (ANP) – The current performance of the navigational system
• Along Track Distance (ATD) – A distance in NM to the active waypoint along a specified track. Unlike conventional DME which has a slant-range error that increases with altitude, ATD does not have any slant range error; therefore, pilots may see a difference in distance indications from ground based stations and GPS systems
• Desired Track (DTK) – The compass course between the FROM and TO waypoint. It is the actual track you want to fly
• Direct To – A function used with GPS equipment to provide the necessary course from present position directly to the selected waypoint. Selecting direct to an airport does not place that airport as the “destination” in the route page
• Fly-By Waypoint – A waypoint that permits turn anticipation and does not require the aircraft to pass directly over it
• Fly-Over Waypoint – A waypoint that requires the aircraft to pass directly over it
• Horizontal Integrity Limit (HIL) – The radius of a circle in a horizontal plane within which the worst case radial position error stays 99.99% of the time (a circle where the receiver believes it is located)
GPS Common Terms
• Instrument Approach Waypoints – Waypoints used in defining instrument approach procedures, including the initial approach waypoint, intermediate waypoint, final approach waypoint (FAWP), missed approach waypoint (MAWP), and the missed approach holding waypoint
• Receiver Autonomous Integrity Monitoring (RAIM) – Internal system which provides integrity monitoring of GPS signals to the receiver. RAIM calculates a horizontal integrity limit (HIL) and vertical integrity limit (VIL) then compares them tothe phase of flight requirements. If the HIL or VIL exceed the requirements, it will alert the user that GPS navigation is unreliable
• Required Navigational Performance (RNP) – The level of performance required for a specific procedure/block of airspace. An RNP of 0.3 means the navigation system must be able to calculate its position to within a circle radius of 0.3 NM
• RNP System – Performance-based navigation system that, unlike RNAV systems, has an on-board performance monitoring and alerting capability (RAIM)
• Turn Anticipation – The capability of RNAV systems to determine the point along a course, prior to a turn waypoint, where a turn should be initiated to provide a smooth path to intercept the next course within the protected airspace and to annunciate the information to the pilot
• Vertical Integrity Limit (VIL) – The radius of a circle in a vertical plane within which the worst case radial position error stays 99.99% of the time (a circle where the receiver believes it is located)
GPS
• System operated by the Department of Defense (DOD)
GPS
• System operated by the Department of Defense (DOD)
• Provides highly accurate position and velocity information, as well as precise time• Uses a worldwide common reference system (World Geodetic System of 1984 – WGS-84 datum)
• Based on concept of ranging and triangulation from the satellites
GPS
• System operated by the Department of Defense (DOD)
• Provides highly accurate position and velocity information, as well as precise time• Uses a worldwide common reference system (World Geodetic System of 1984 – WGS-84 datum)
• Based on concept of ranging and triangulation from the satellites
• 2 Levels of service:• Standard Positioning Service (SPS) – 100m or less with a 95% probability/300m with 99.99% probability
• Precise Positioning Service (PPS) – more accurate than SPS & mainly military
GPS Constellation
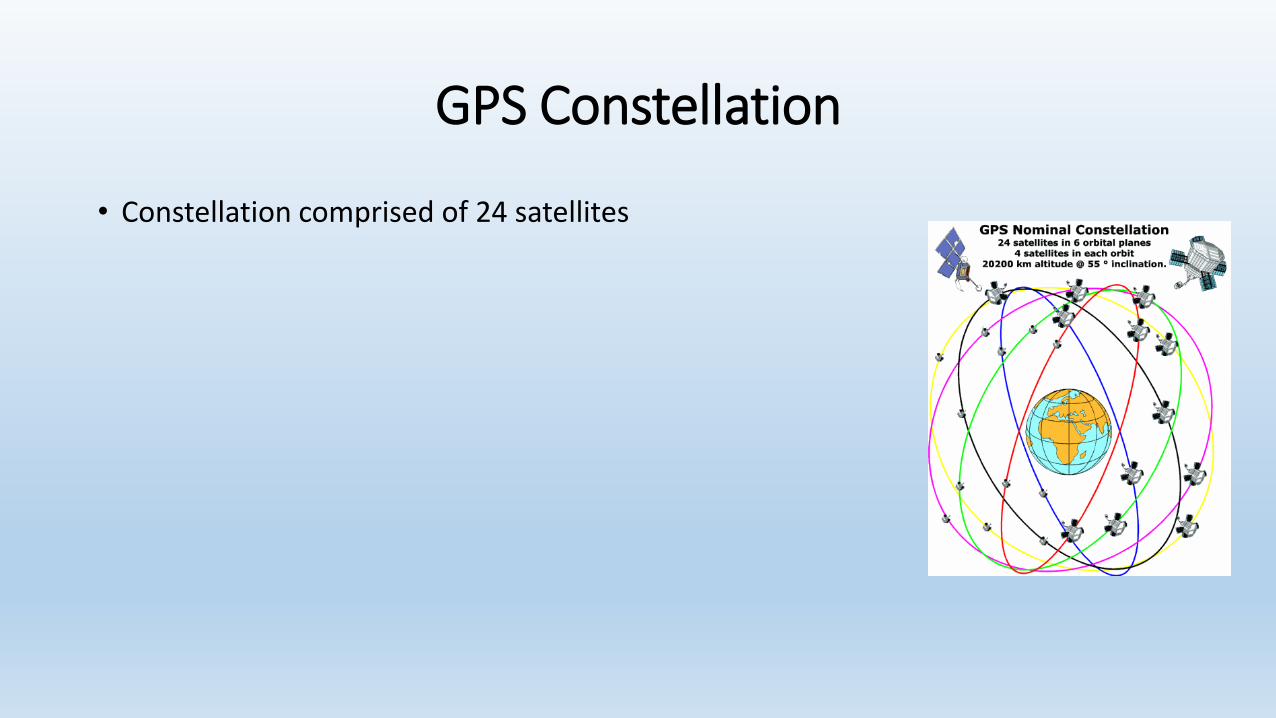
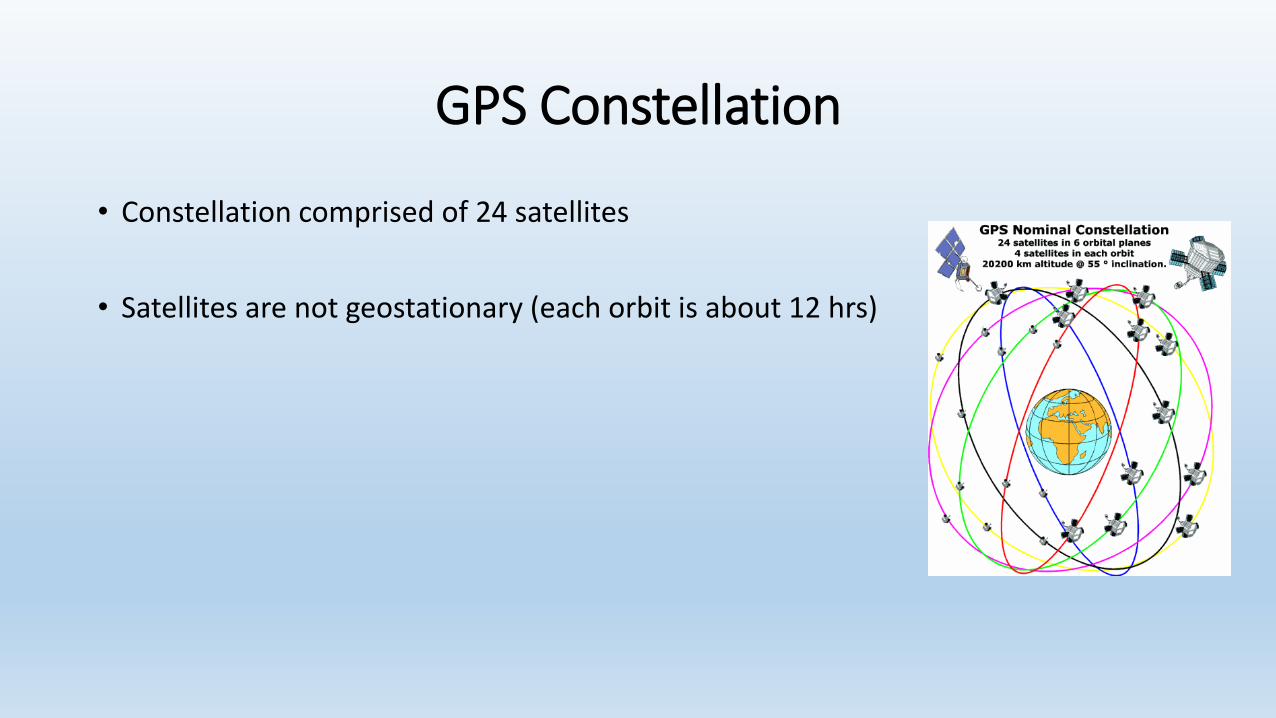
• Constellation comprised of 24 satellites
GPS Constellation
• Constellation comprised of 24 satellites
• Satellites are not geostationary (each orbit is about 12 hrs)
GPS Constellation
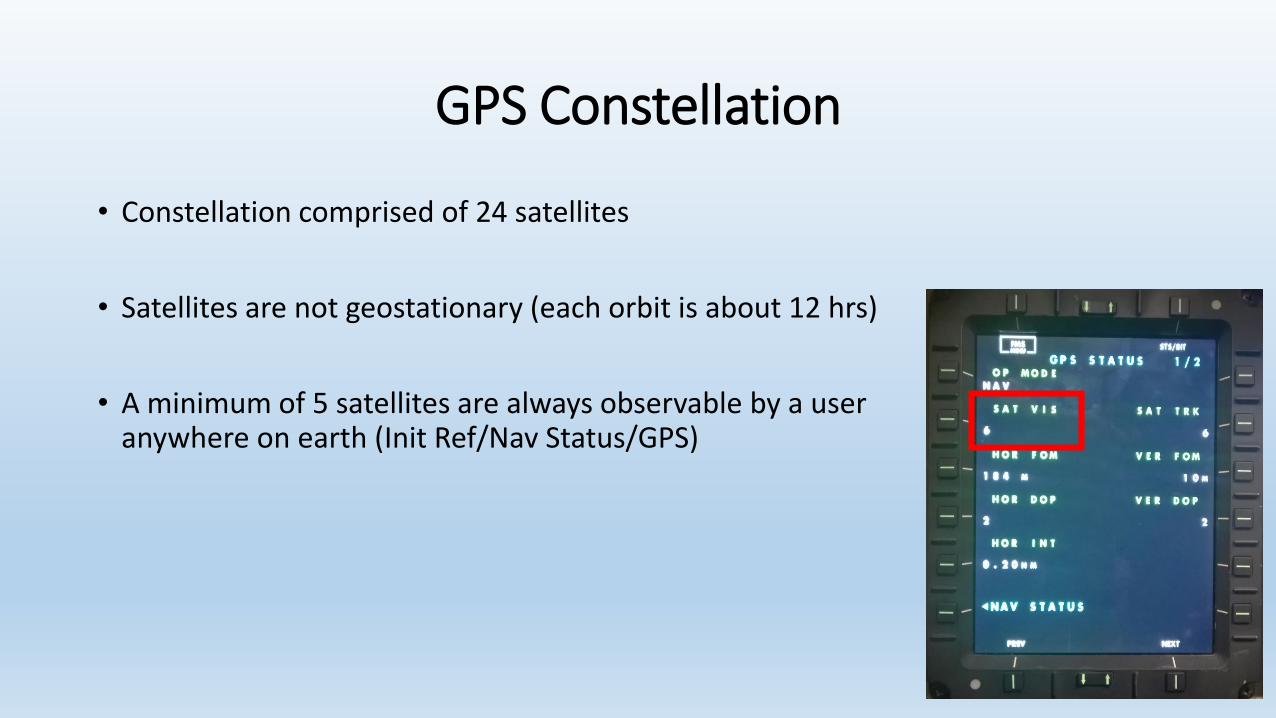
• Constellation comprised of 24 satellites
• Satellites are not geostationary (each orbit is about 12 hrs)
• A minimum of 5 satellites are always observable by a user anywhere on earth (Init Ref/Nav Status/GPS)
GPS Constellation
• Constellation comprised of 24 satellites
• Satellites are not geostationary (each orbit is about 12 hrs)
• A minimum of 5 satellites are always observable by a user anywhere on earth (Init Ref/Nav Status/GPS)
• Each satellite transmits a course/acquisition (CA) code• Specific to each satellite so receivers can differentiate satellites
• Contains satellite’s position, system time, & health/accuracy of the data
• Signal traveling at 186,000 miles per second
Receiver Autonomous Integrity Monitoring (RAIM)
• Our GPS is a performance-based system utilizing RNP specifications• Receiver requires an internal monitoring capability
• Receiver must have an ability to display faults to pilot
• RAIM accomplishes these two requirements
Receiver Autonomous Integrity Monitoring (RAIM)
• Our GPS is a performance-based system utilizing RNP specifications• Receiver requires an internal monitoring capability
• Receiver must have an ability to display faults to pilot
• RAIM accomplishes these two requirements
• Requires an additional, autonomous satellite that is NOT one of the 4 used for navigation (5 total satellites required)
Receiver Autonomous Integrity Monitoring (RAIM)
• Our GPS is a performance-based system utilizing RNP specifications• Receiver requires an internal monitoring capability
• Receiver must have an ability to display faults to pilot
• RAIM accomplishes these two requirements
• Requires an additional, autonomous satellite that is NOT one of the 4 used for navigation (5 total satellites required)
• What does RAIM do?
• Monitors the health or integrity of the GPS signals
• Calculates a HIL & VIL
• Compares the calculated HIL & VIL (ANP) to the requirements for the phase of flight (RNP)
• Can be predictive for approach considerations (Predictive RAIM)
• If not in limits, alerts the pilot with “GPS NAV LOST” msg
Receiver Autonomous Integrity Monitoring (RAIM)
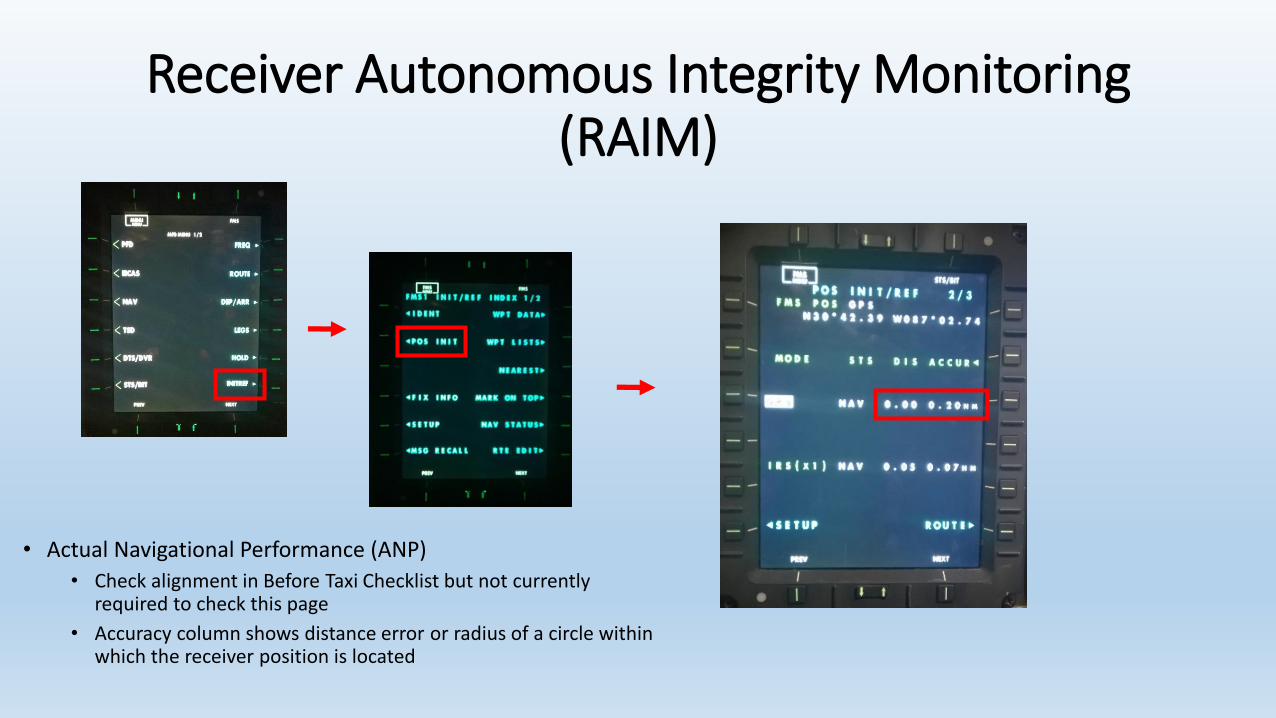
• Actual Navigational Performance (ANP)
• Check alignment in Before Taxi Checklist but not currently required to check this page
• Accuracy column shows distance error or radius of a circle within which the receiver position is located
Receiver Autonomous Integrity Monitoring (RAIM)
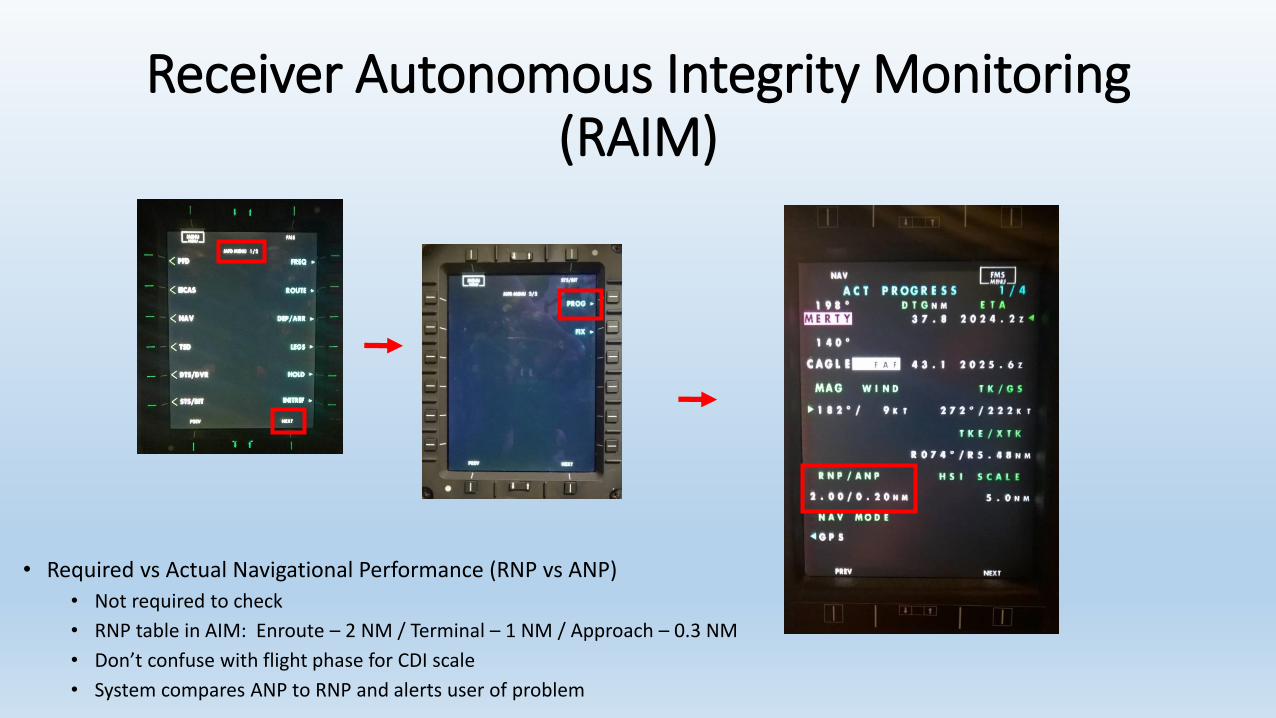
• Required vs Actual Navigational Performance (RNP vs ANP)
• Not required to check
• RNP table in AIM: Enroute – 2 NM / Terminal – 1 NM / Approach – 0.3 NM
• Don’t confuse with flight phase for CDI scale
• System compares ANP to RNP and alerts user of problem
Receiver Autonomous Integrity Monitoring (RAIM)
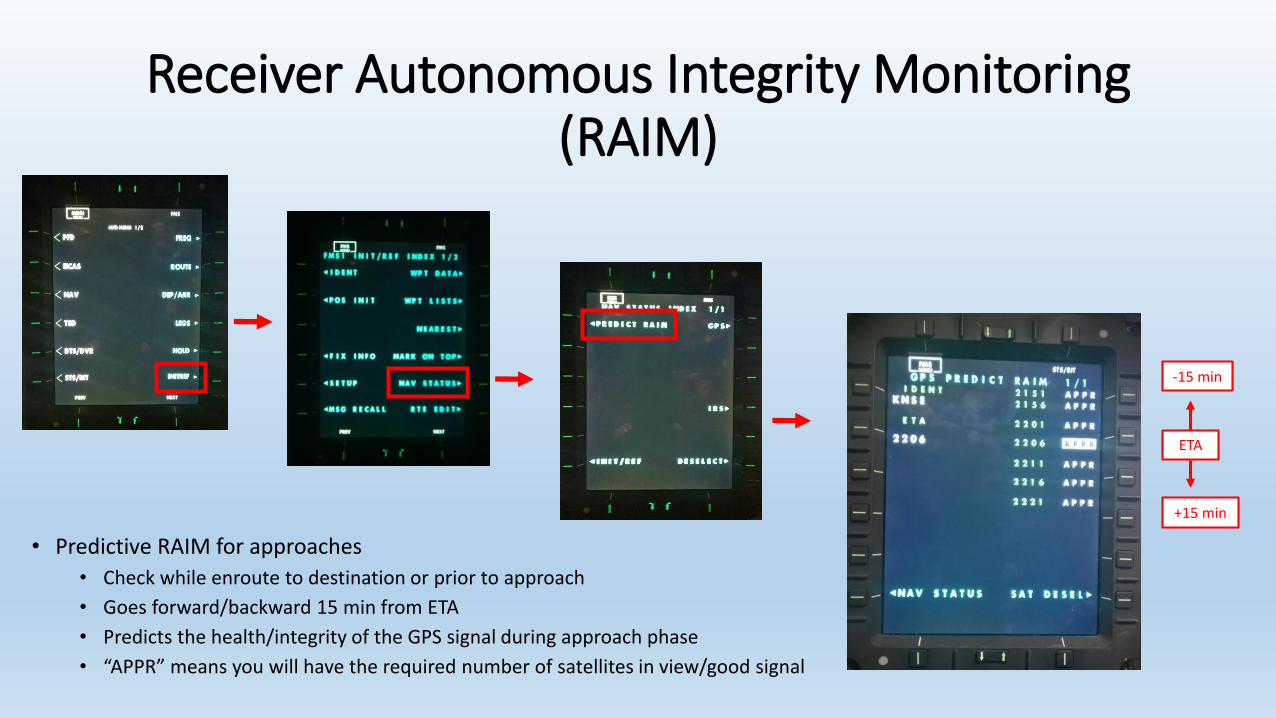
• Predictive RAIM for approaches
• Check while enroute to destination or prior to approach
• Goes forward/backward 15 min from ETA
• Predicts the health/integrity of the GPS signal during approach phase
• “APPR” means you will have the required number of satellites in view/good signal
ETA
-15 min
+15 min
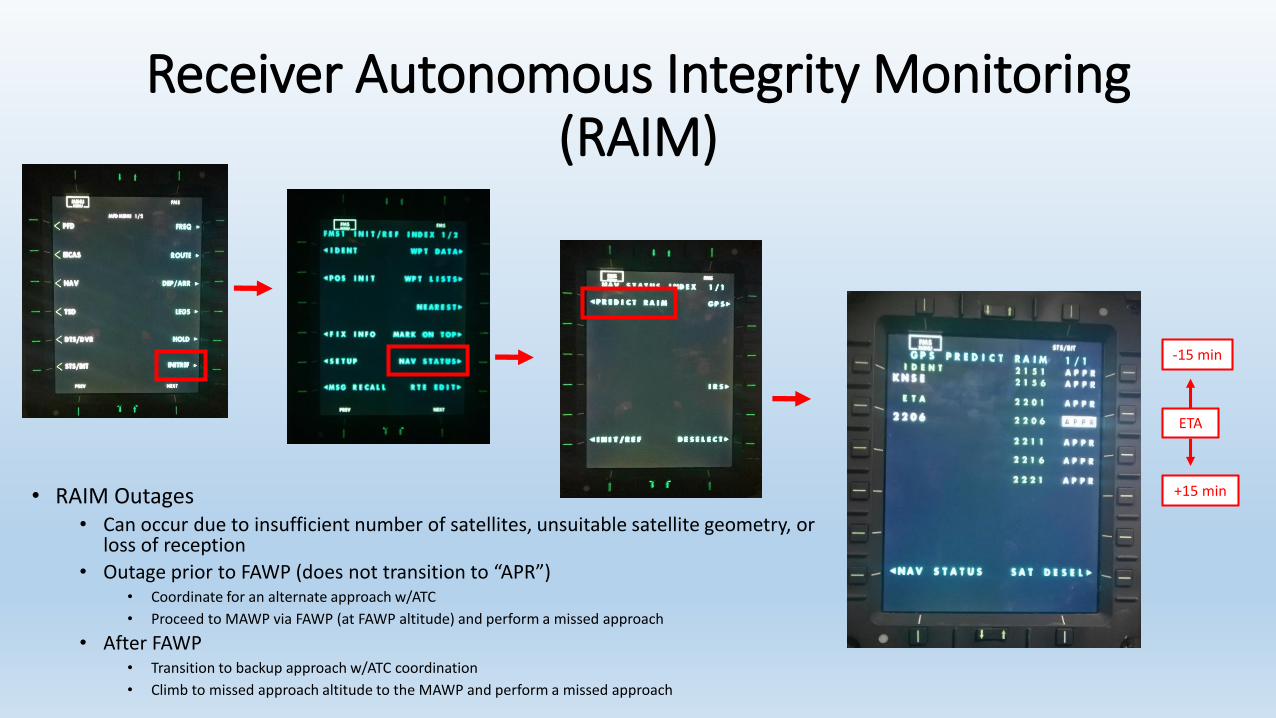
Receiver Autonomous Integrity Monitoring (RAIM)
• RAIM Outages• Can occur due to insufficient number of satellites, unsuitable satellite geometry, or
loss of reception
• Outage prior to FAWP (does not transition to “APR”)• Coordinate for an alternate approach w/ATC
• Proceed to MAWP via FAWP (at FAWP altitude) and perform a missed approach
• After FAWP• Transition to backup approach w/ATC coordination
• Climb to missed approach altitude to the MAWP and perform a missed approach
ETA
-15 min
+15 min
Receiver Autonomous Integrity Monitoring (RAIM)
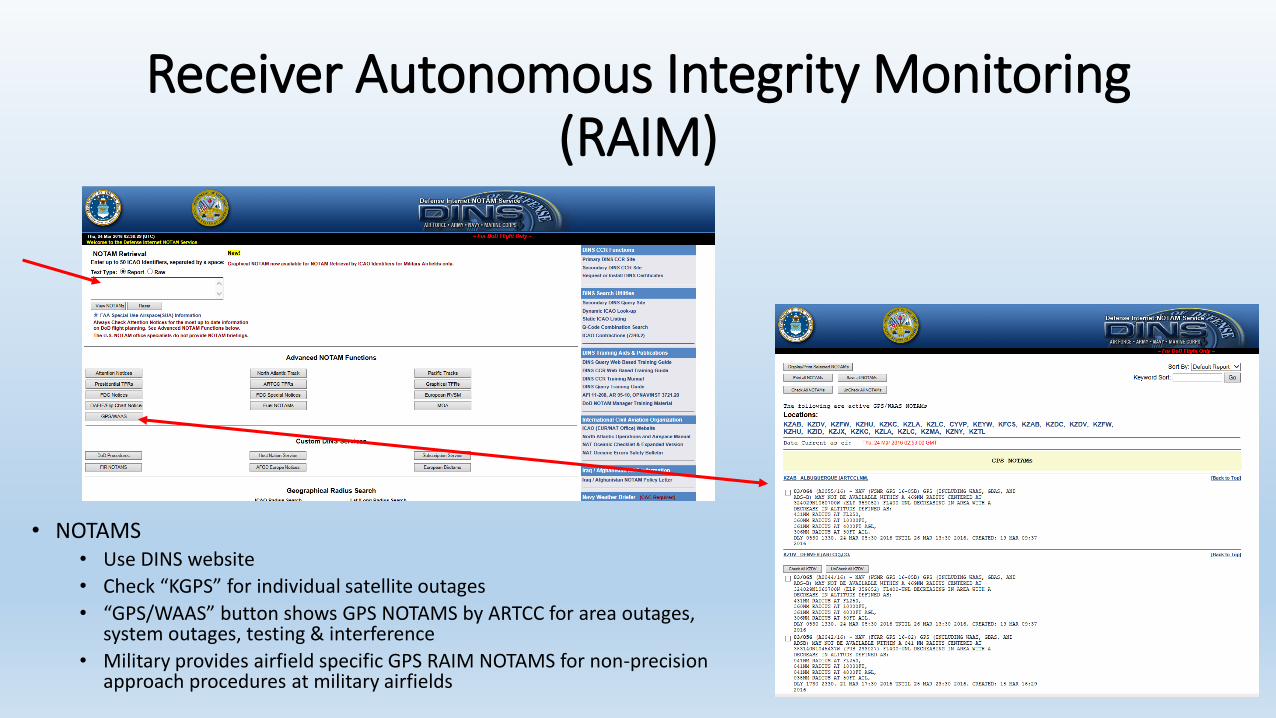
• NOTAMS• Use DINS website
• Check “KGPS” for individual satellite outages
• “GPS/WAAS” button shows GPS NOTAMS by ARTCC for area outages, system outages, testing & interference
• Military provides airfield specific GPS RAIM NOTAMS for non-precision approach procedures at military airfields
GPS Receiver
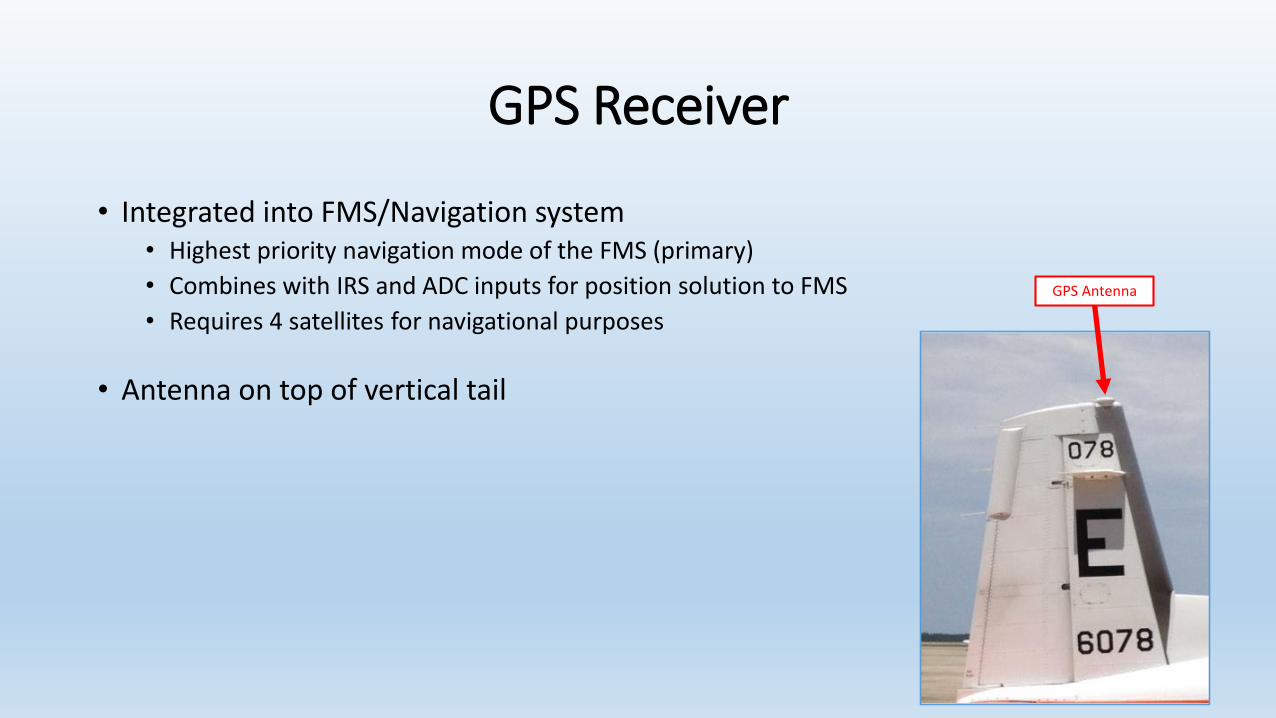
• Integrated into FMS/Navigation system• Highest priority navigation mode of the FMS (primary)
• Combines with IRS and ADC inputs for position solution to FMS
• Requires 4 satellites for navigational purposes
GPS Receiver
• Integrated into FMS/Navigation system• Highest priority navigation mode of the FMS (primary)
• Combines with IRS and ADC inputs for position solution to FMS
• Requires 4 satellites for navigational purposes
• Antenna on top of vertical tail
GPS Antenna
GPS Receiver
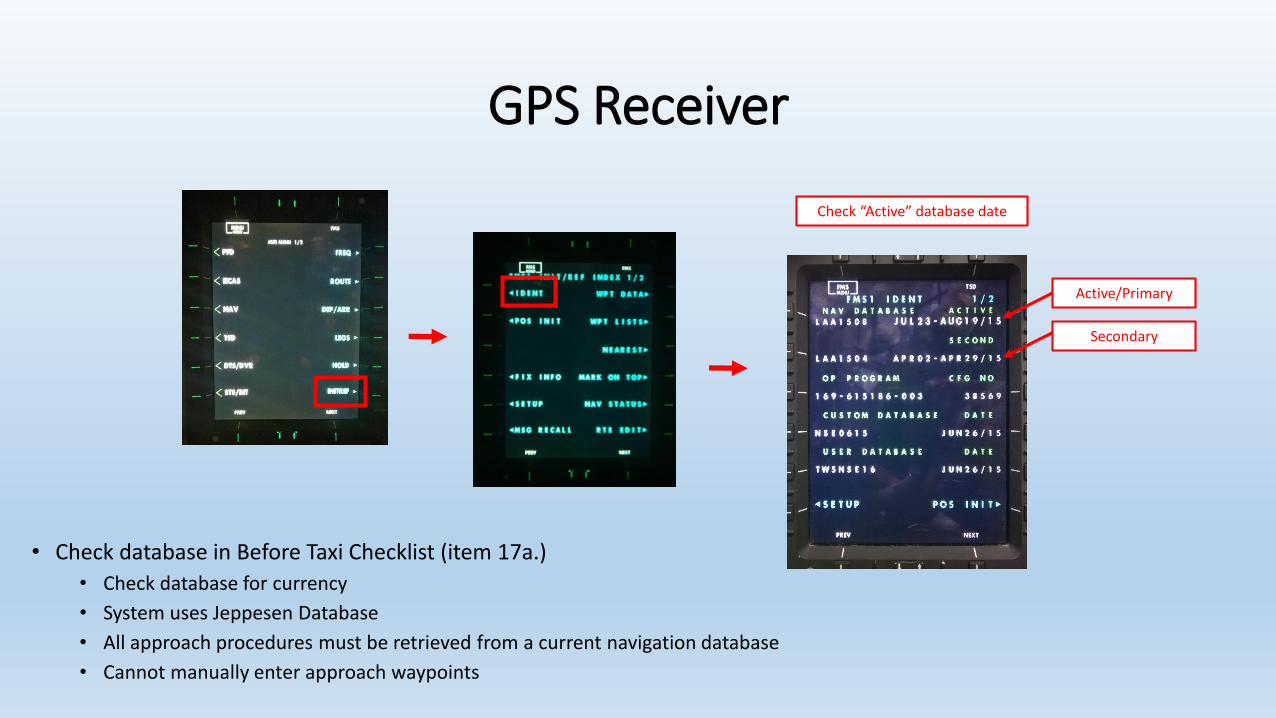
Check “Active” database date
• Check database in Before Taxi Checklist (item 17a.)
• Check database for currency
• System uses Jeppesen Database
• All approach procedures must be retrieved from a current navigation database
• Cannot manually enter approach waypoints
Active/Primary
Secondary
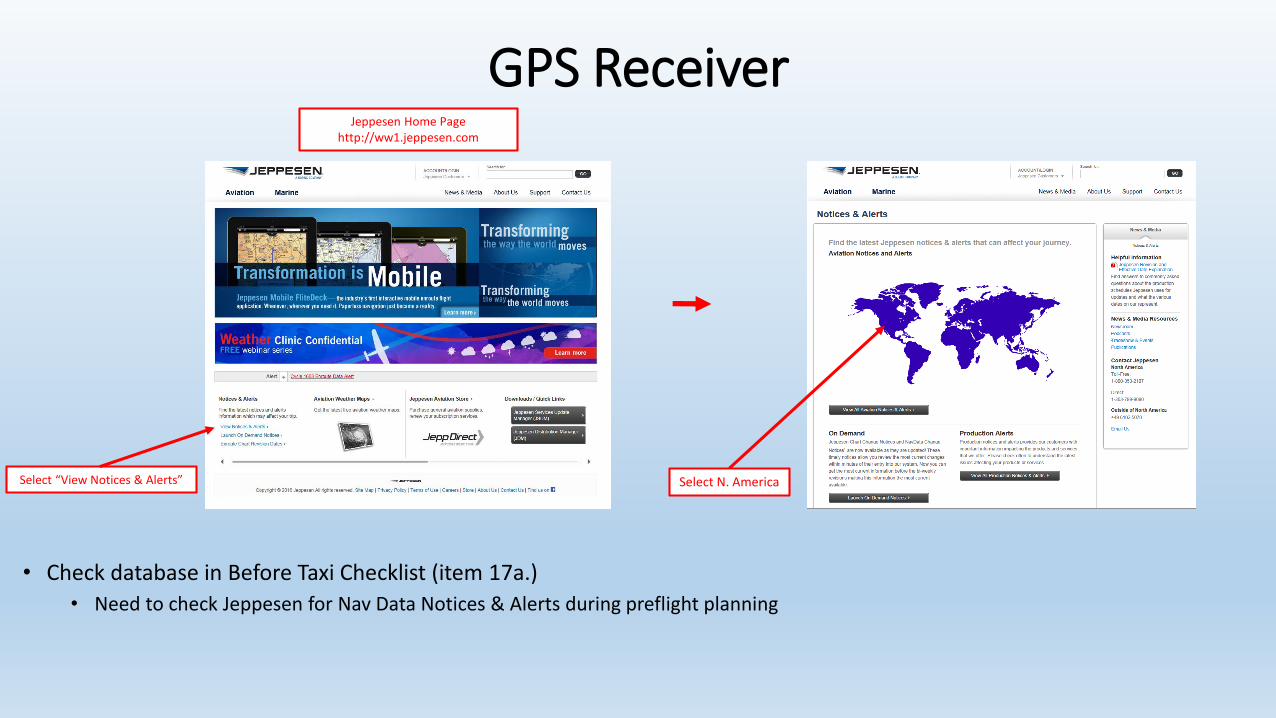
GPS Receiver
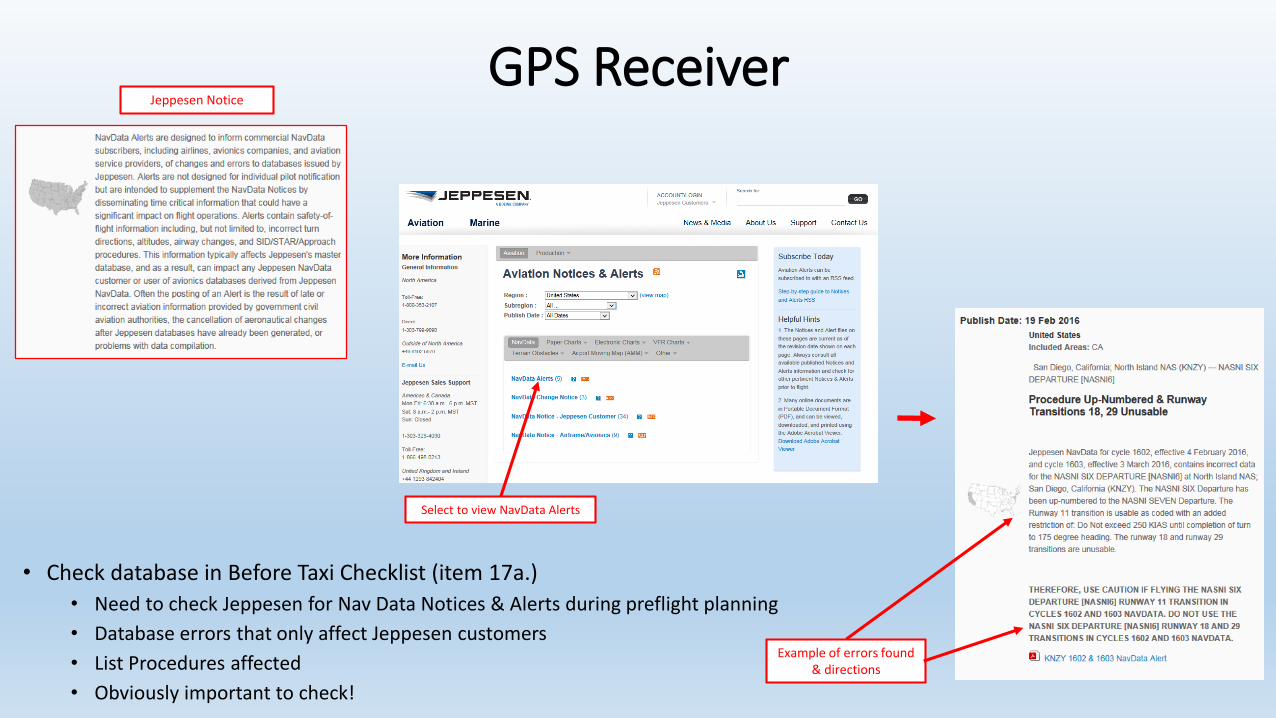
• Check database in Before Taxi Checklist (item 17a.)
• Need to check Jeppesen for Nav Data Notices & Alerts during preflight planning
Select N. America
Jeppesen Home Pagehttp://ww1.jeppesen.com
Select “View Notices & Alerts”
GPS Receiver
• Check database in Before Taxi Checklist (item 17a.)
• Need to check Jeppesen for Nav Data Notices & Alerts during preflight planning
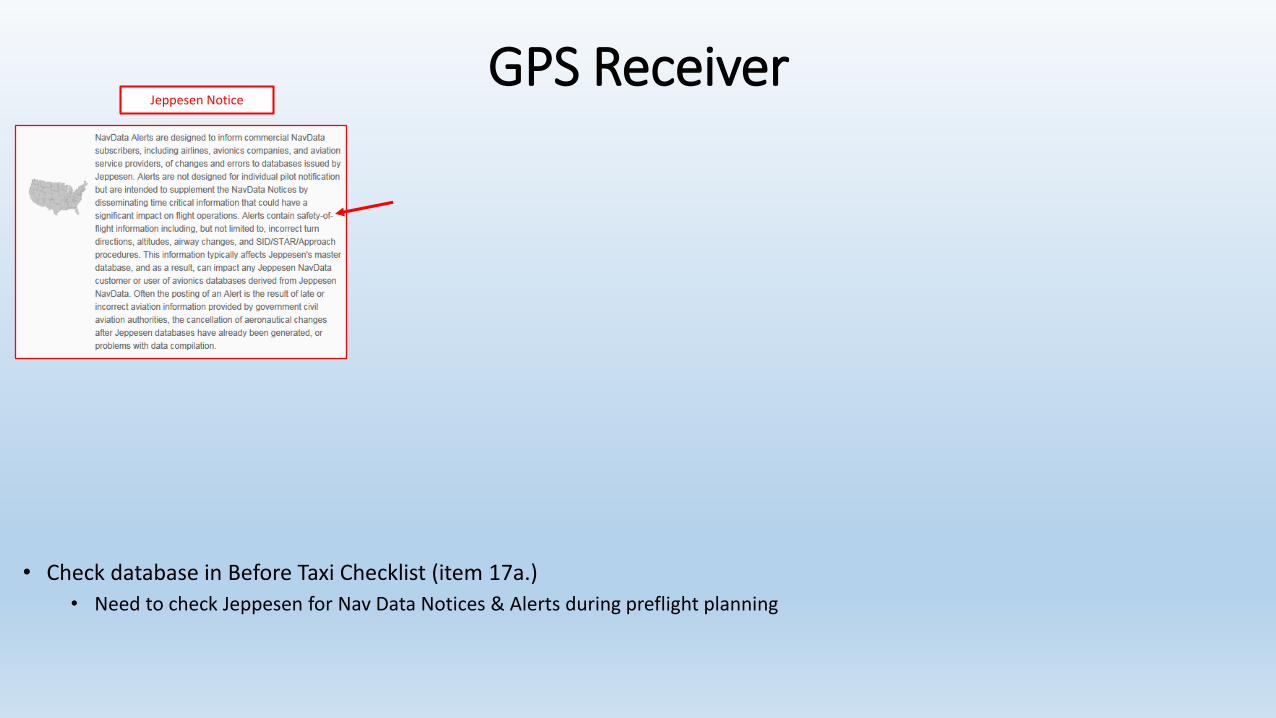
Jeppesen Notice
GPS Receiver
• Check database in Before Taxi Checklist (item 17a.)
• Need to check Jeppesen for Nav Data Notices & Alerts during preflight planning
• Database errors that only affect Jeppesen customers
• List Procedures affected
• Obviously important to check!
Example of errors found & directions
Select to view NavData Alerts
Jeppesen Notice
GPS Receiver
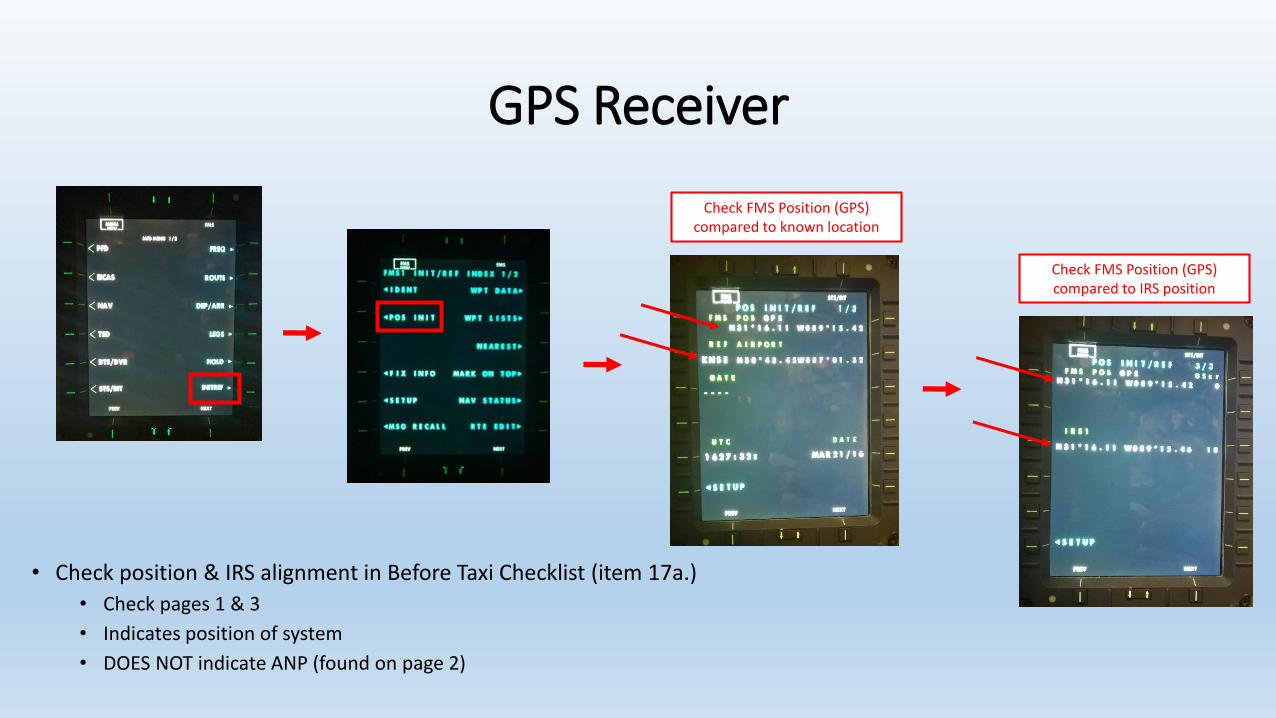
Check FMS Position (GPS) compared to known location
Check FMS Position (GPS) compared to IRS position
• Check position & IRS alignment in Before Taxi Checklist (item 17a.)
• Check pages 1 & 3
• Indicates position of system
• DOES NOT indicate ANP (found on page 2)
GPS Receiver
• Flight Phase
GPS Receiver
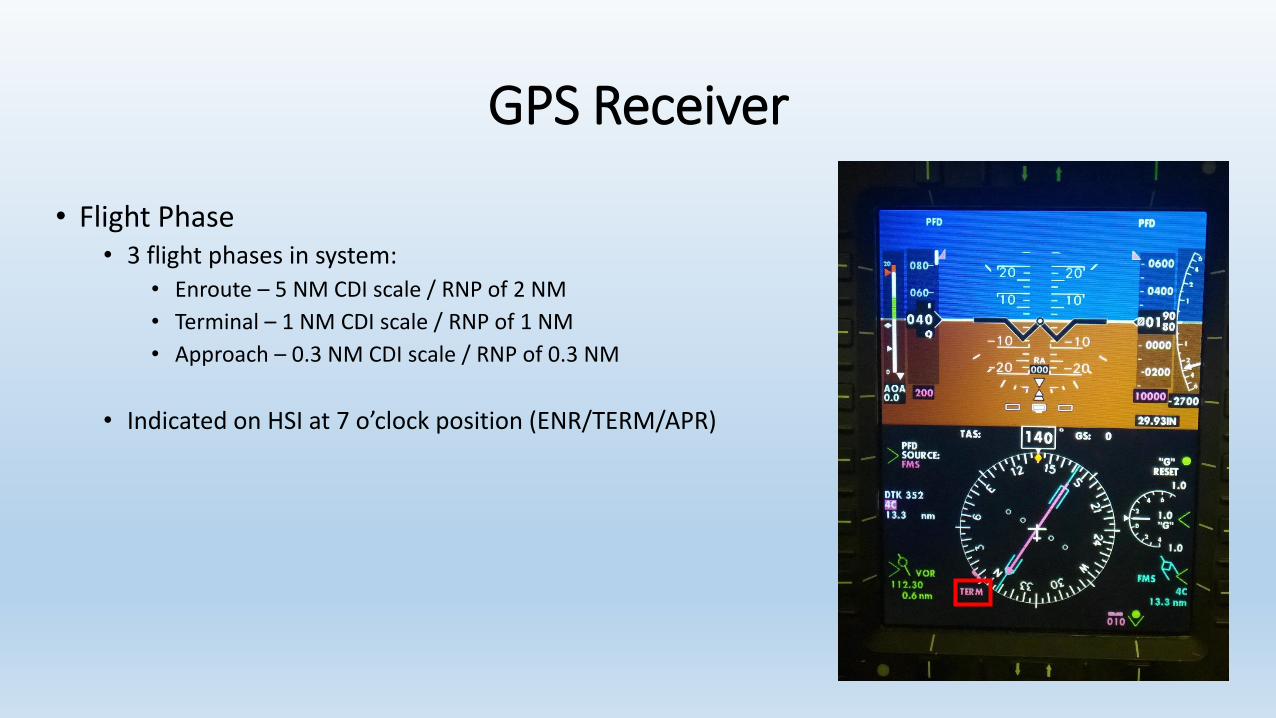
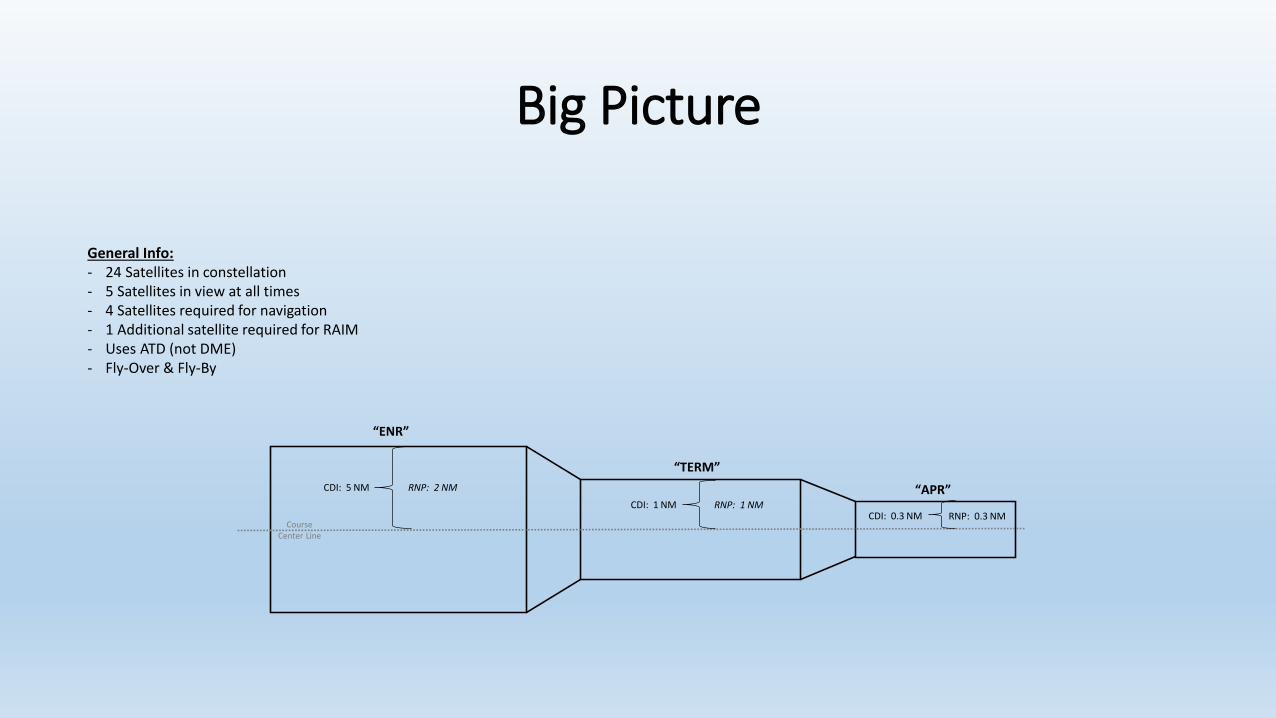
• Flight Phase• 3 flight phases in system:
• Enroute – 5 NM CDI scale / RNP of 2 NM
• Terminal – 1 NM CDI scale / RNP of 1 NM
• Approach – 0.3 NM CDI scale / RNP of 0.3 NM
GPS Receiver
• Flight Phase• 3 flight phases in system:
• Enroute – 5 NM CDI scale / RNP of 2 NM
• Terminal – 1 NM CDI scale / RNP of 1 NM
• Approach – 0.3 NM CDI scale / RNP of 0.3 NM
• Indicated on HSI at 7 o’clock position (ENR/TERM/APR)
GPS Receiver
• Flight Phase• 3 flight phases in system:
• Enroute – 5 NM CDI scale / RNP of 2 NM
• Terminal – 1 NM CDI scale / RNP of 1 NM
• Approach – 0.3 NM CDI scale / RNP of 0.3 NM
• Indicated on HSI at 7 o’clock position (ENR/TERM/APR)
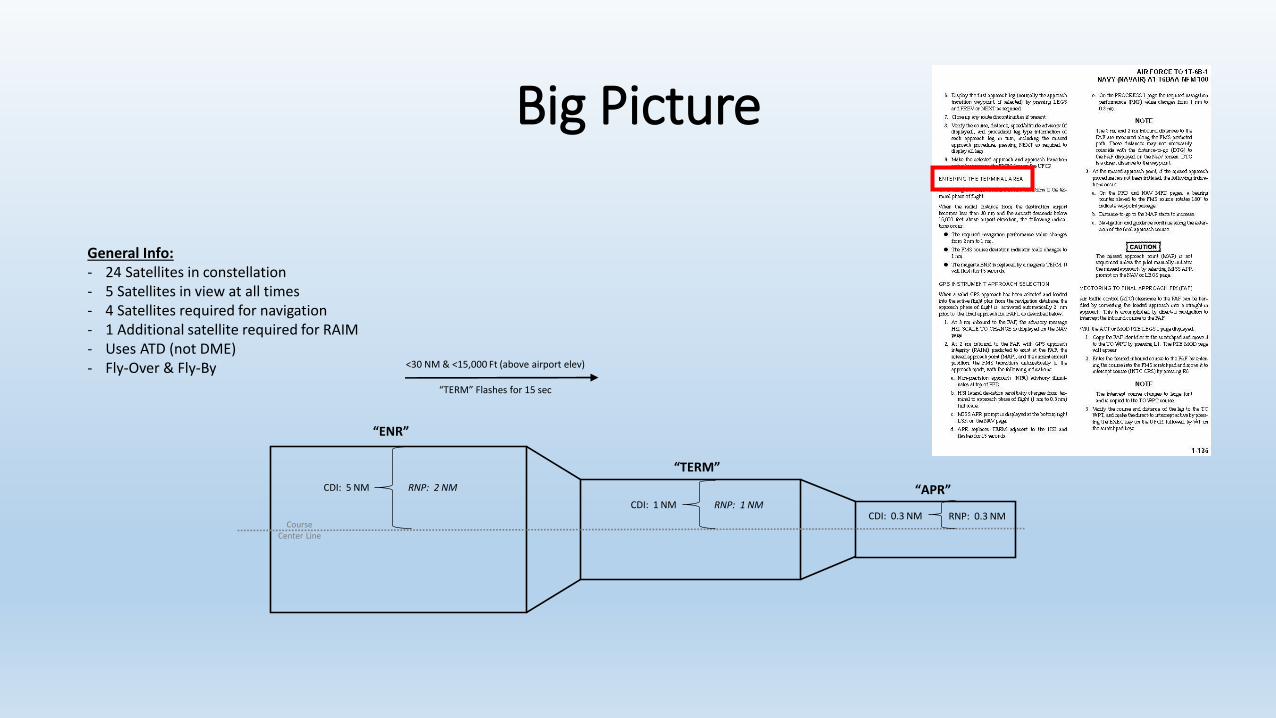
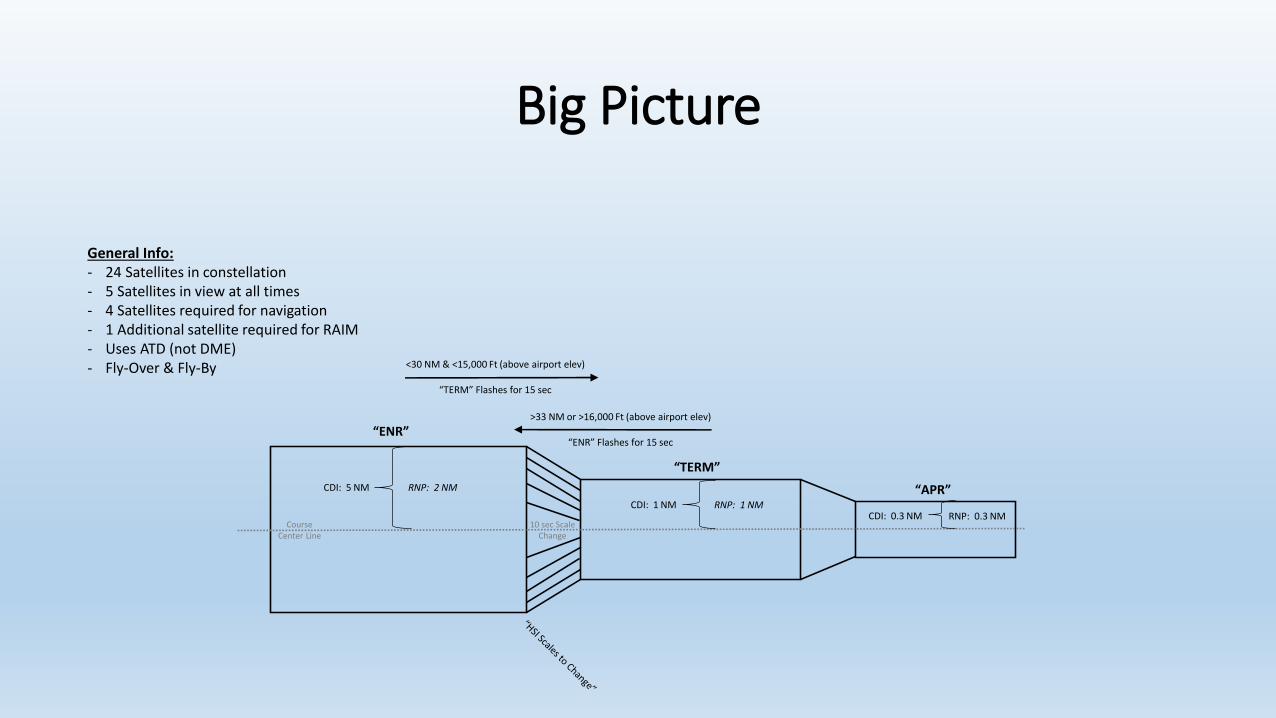
• System warnings of flight phase changes• Status Message: “HSI Scales to Change”
• Flight Phase indication flashes for 15 seconds
GPS Receiver
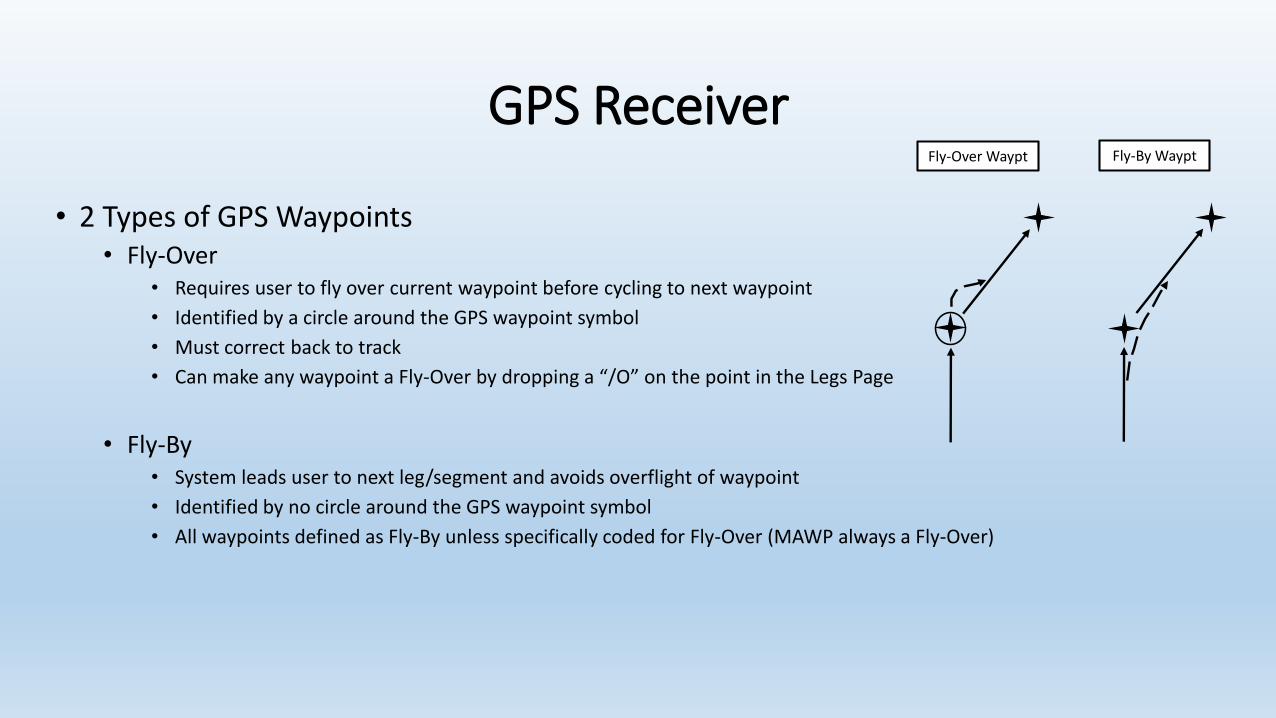
• 2 Types of GPS Waypoints
GPS Receiver
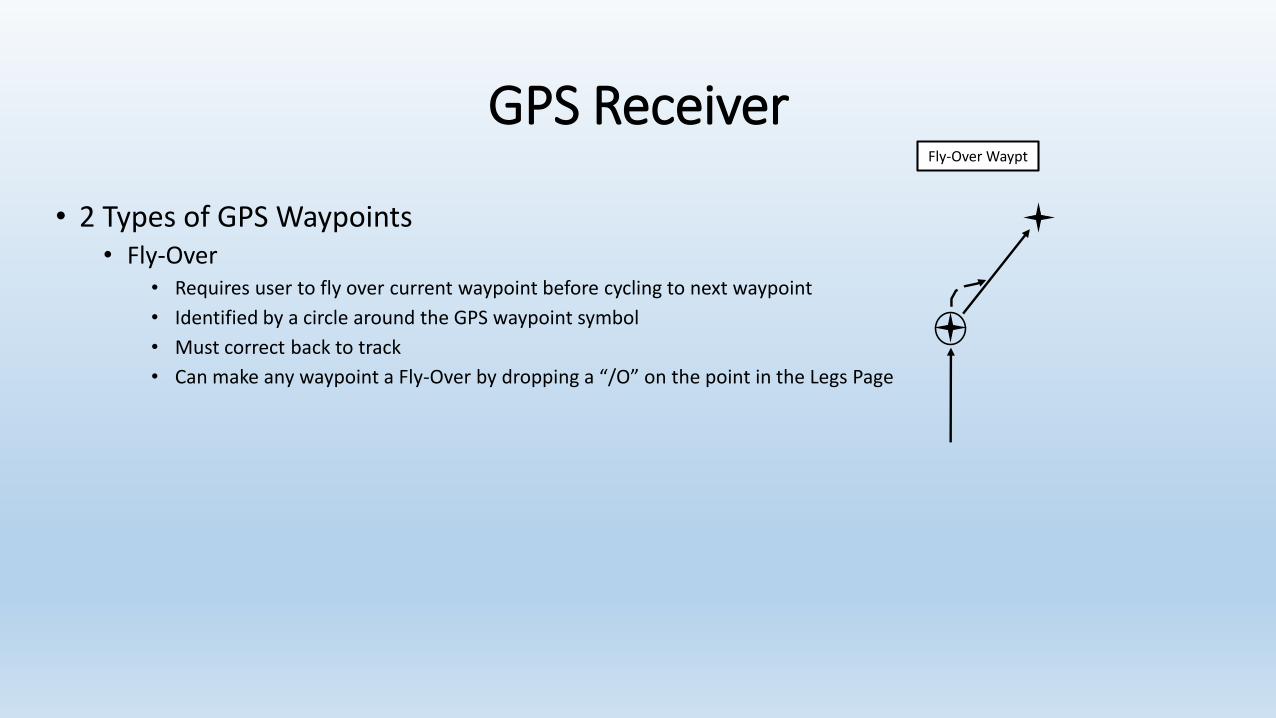
• 2 Types of GPS Waypoints• Fly-Over
• Requires user to fly over current waypoint before cycling to next waypoint
• Identified by a circle around the GPS waypoint symbol
• Must correct back to track
• Can make any waypoint a Fly-Over by dropping a “/O” on the point in the Legs Page
Fly-Over Waypt
GPS Receiver
• 2 Types of GPS Waypoints• Fly-Over
• Requires user to fly over current waypoint before cycling to next waypoint
• Identified by a circle around the GPS waypoint symbol
• Must correct back to track
• Can make any waypoint a Fly-Over by dropping a “/O” on the point in the Legs Page
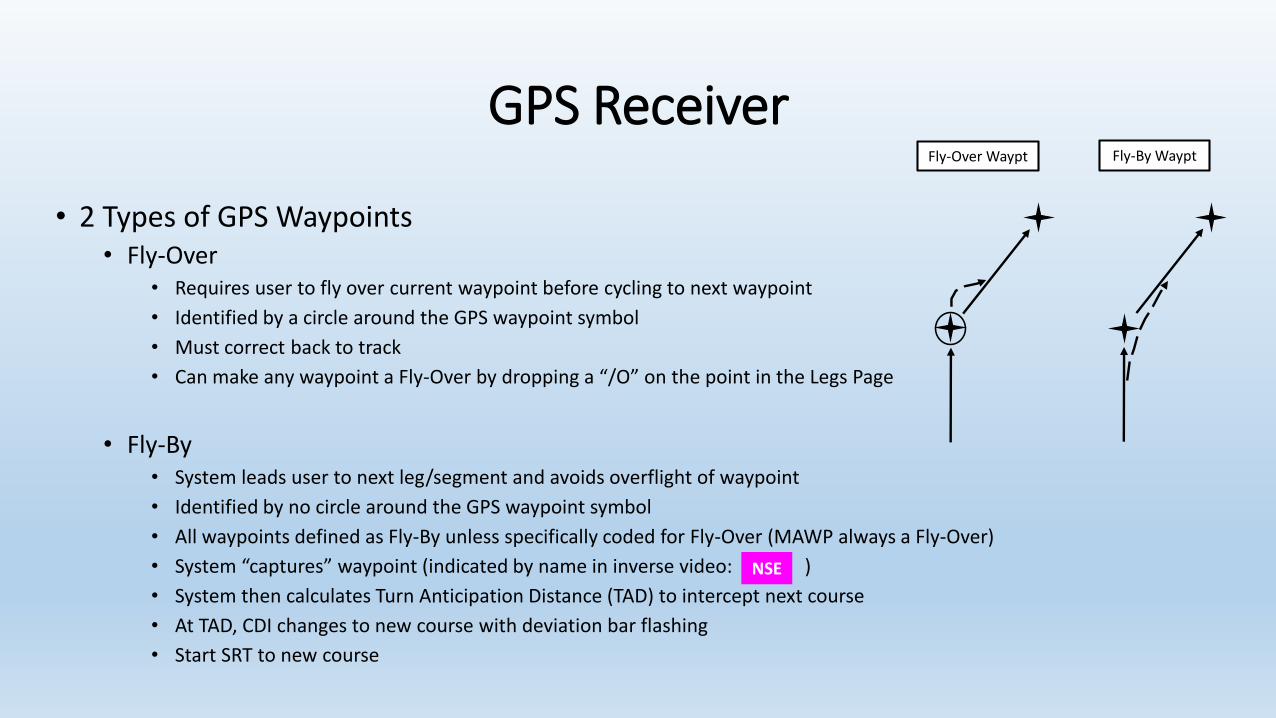
• Fly-By• System leads user to next leg/segment and avoids overflight of waypoint
• Identified by no circle around the GPS waypoint symbol
• All waypoints defined as Fly-By unless specifically coded for Fly-Over (MAWP always a Fly-Over)
Fly-By WayptFly-Over Waypt
GPS Receiver
• 2 Types of GPS Waypoints• Fly-Over
• Requires user to fly over current waypoint before cycling to next waypoint
• Identified by a circle around the GPS waypoint symbol
• Must correct back to track
• Can make any waypoint a Fly-Over by dropping a “/O” on the point in the Legs Page
• Fly-By• System leads user to next leg/segment and avoids overflight of waypoint
• Identified by no circle around the GPS waypoint symbol
• All waypoints defined as Fly-By unless specifically coded for Fly-Over (MAWP always a Fly-Over)
• System “captures” waypoint (indicated by name in inverse video: )
• System then calculates Turn Anticipation Distance (TAD) to intercept next course
• At TAD, CDI changes to new course with deviation bar flashing
• Start SRT to new course
Fly-By WayptFly-Over Waypt
NSE
GPS Receiver
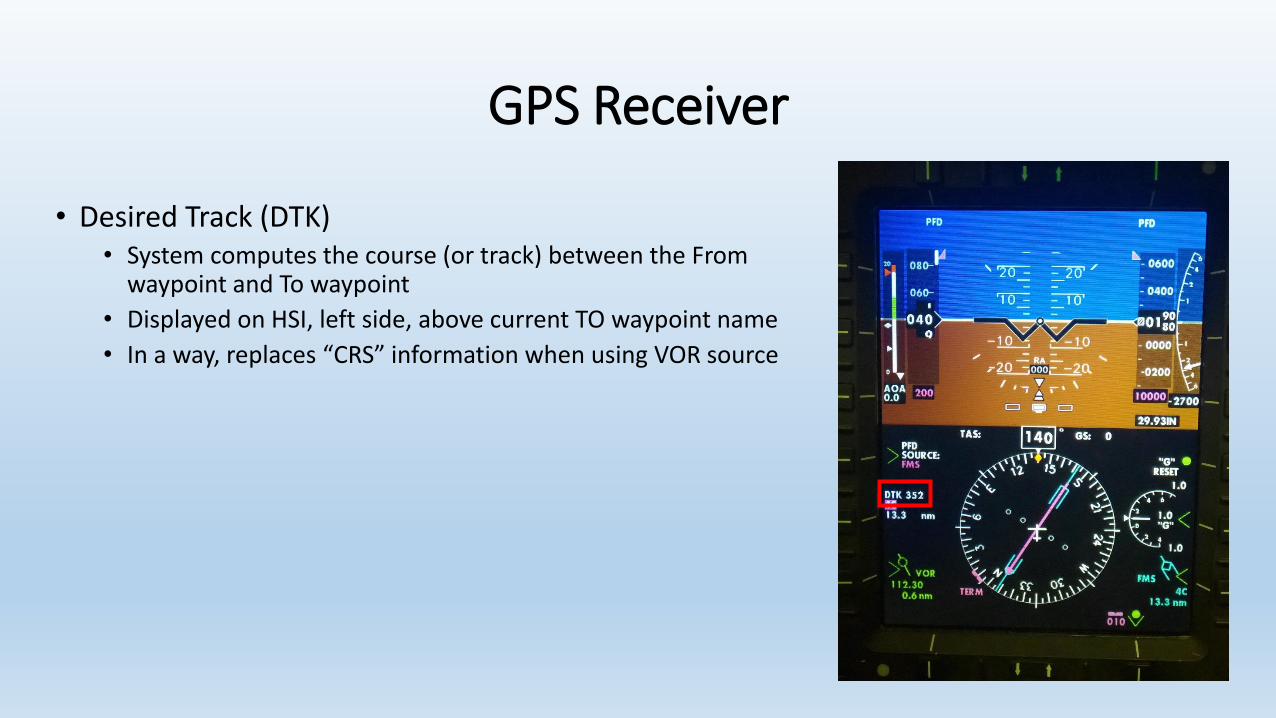
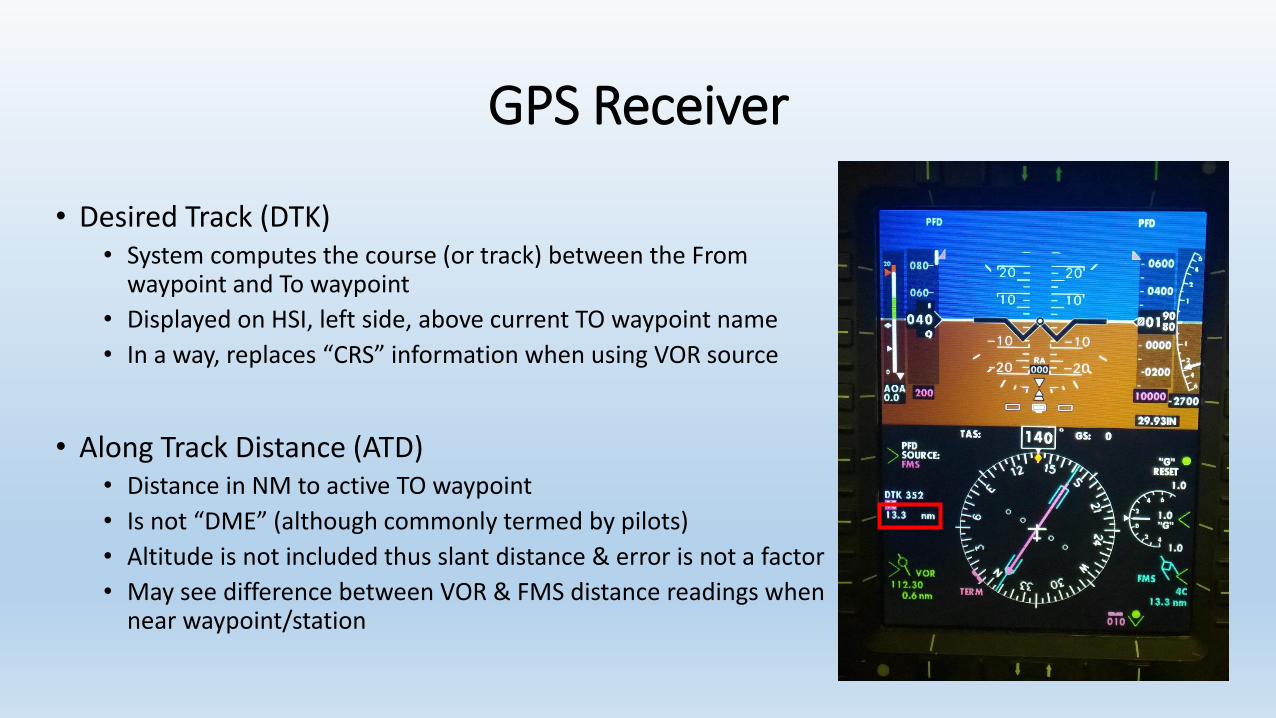
• Desired Track (DTK)• System computes the course (or track) between the From
waypoint and To waypoint
• Displayed on HSI, left side, above current TO waypoint name
• In a way, replaces “CRS” information when using VOR source
GPS Receiver
• Desired Track (DTK)• System computes the course (or track) between the From
waypoint and To waypoint
• Displayed on HSI, left side, above current TO waypoint name
• In a way, replaces “CRS” information when using VOR source
• Along Track Distance (ATD)• Distance in NM to active TO waypoint
• Is not “DME” (although commonly termed by pilots)
• Altitude is not included thus slant distance & error is not a factor
• May see difference between VOR & FMS distance readings when near waypoint/station
GPS Waypoint Usage
• What can the GPS be used for?• Determine aircraft position relative to or distance from a fix
• Navigate to/from a VOR, TACAN, NDB or compass locator
• Hold over a VOR, TACAN, NDB, compass locator, or DME fix
GPS Waypoint Usage
• What can the GPS be used for?• Determine aircraft position relative to or distance from a fix
• Navigate to/from a VOR, TACAN, NDB or compass locator
• Hold over a VOR, TACAN, NDB, compass locator, or DME fix
• What can’t the GPS be used for?• Substitute for localizer-based courses
• Substitute for the NAVAID providing lateral guidance from the FAF to the MAP (unless procedure has “GPS” in title)
• Cannot be used to execute a procedure listed as “NA” (example: decommissioned NAVAID or expired procedure)
Big Picture
• Need way to remember system and operation
• Be able to logically walk thru a description of the system
Big Picture
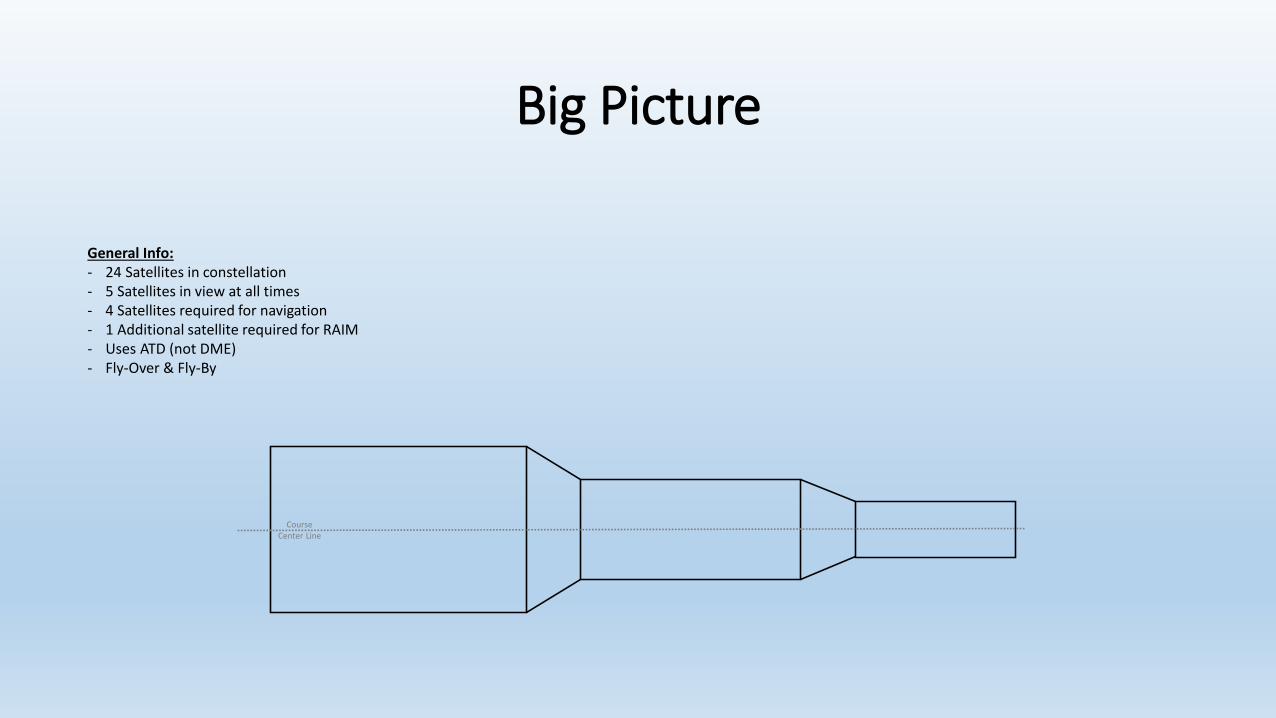
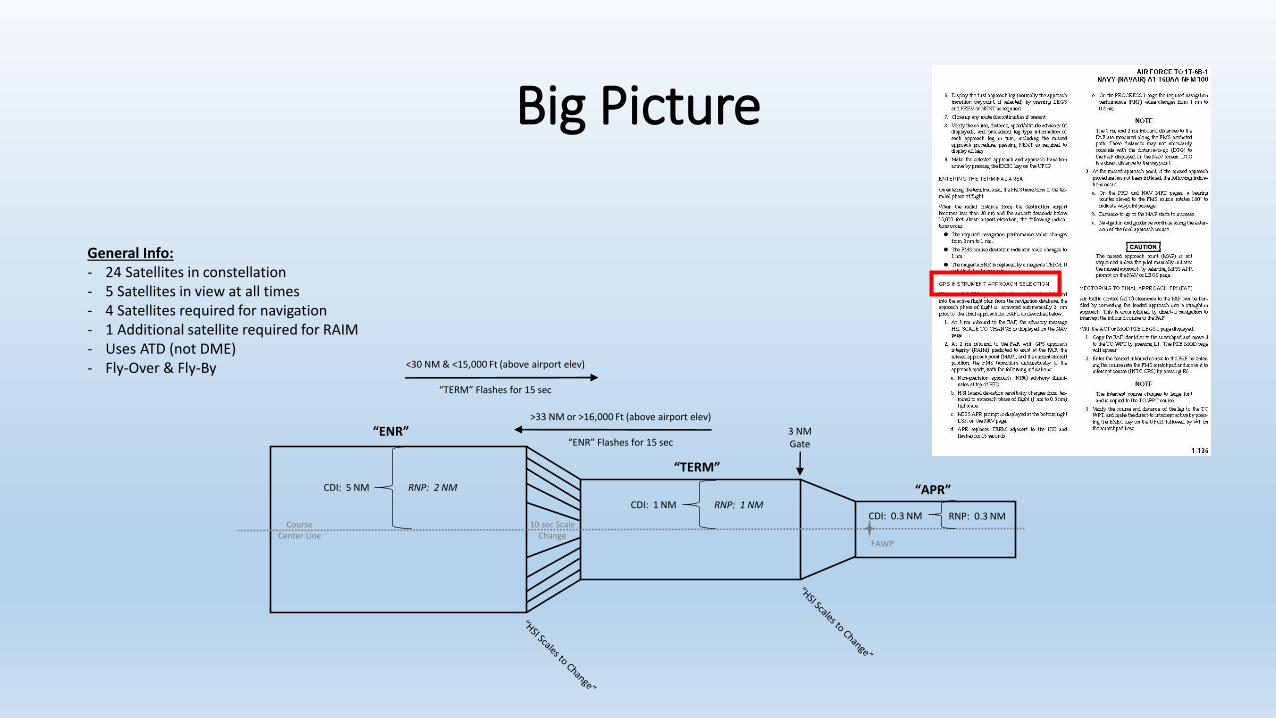
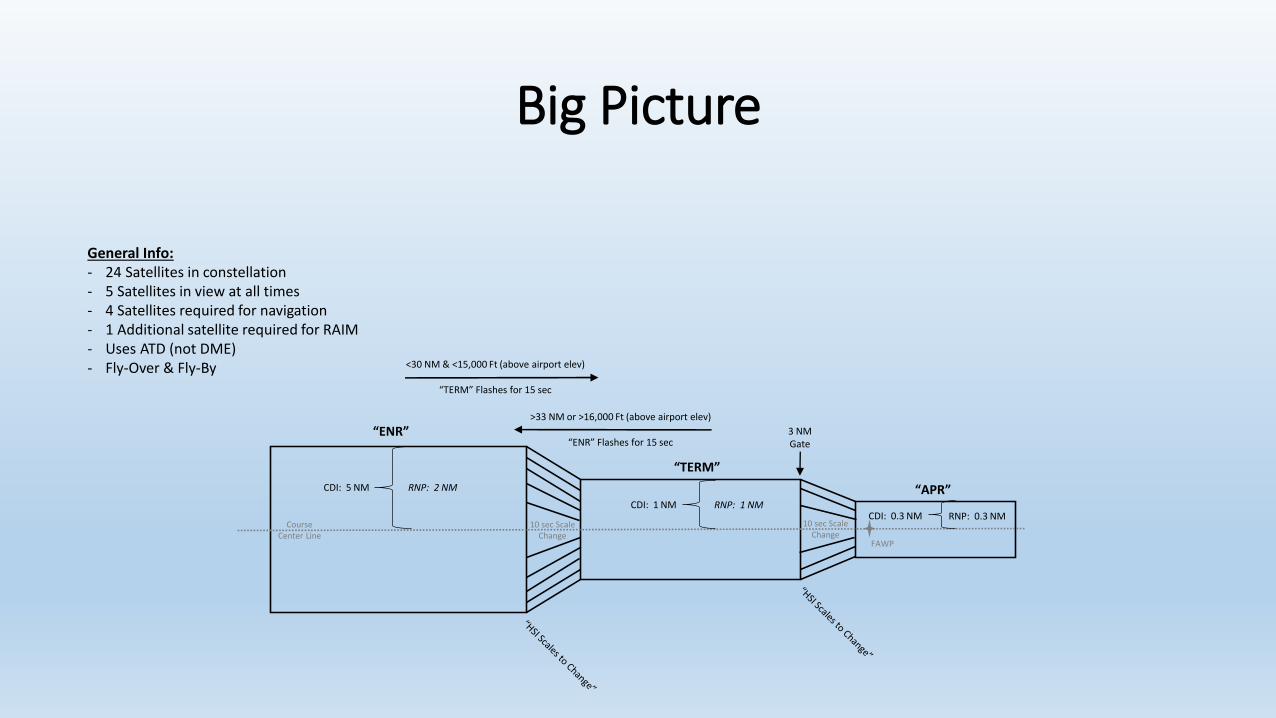
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
CourseCenter Line
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
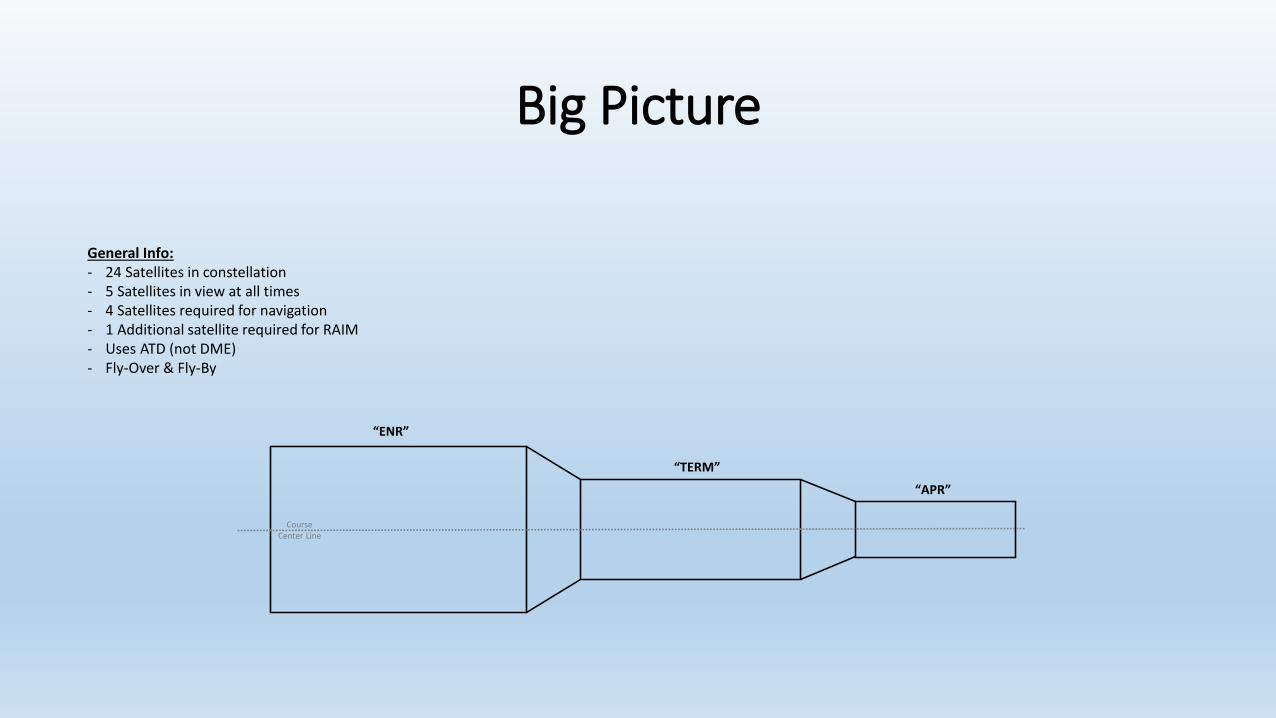
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
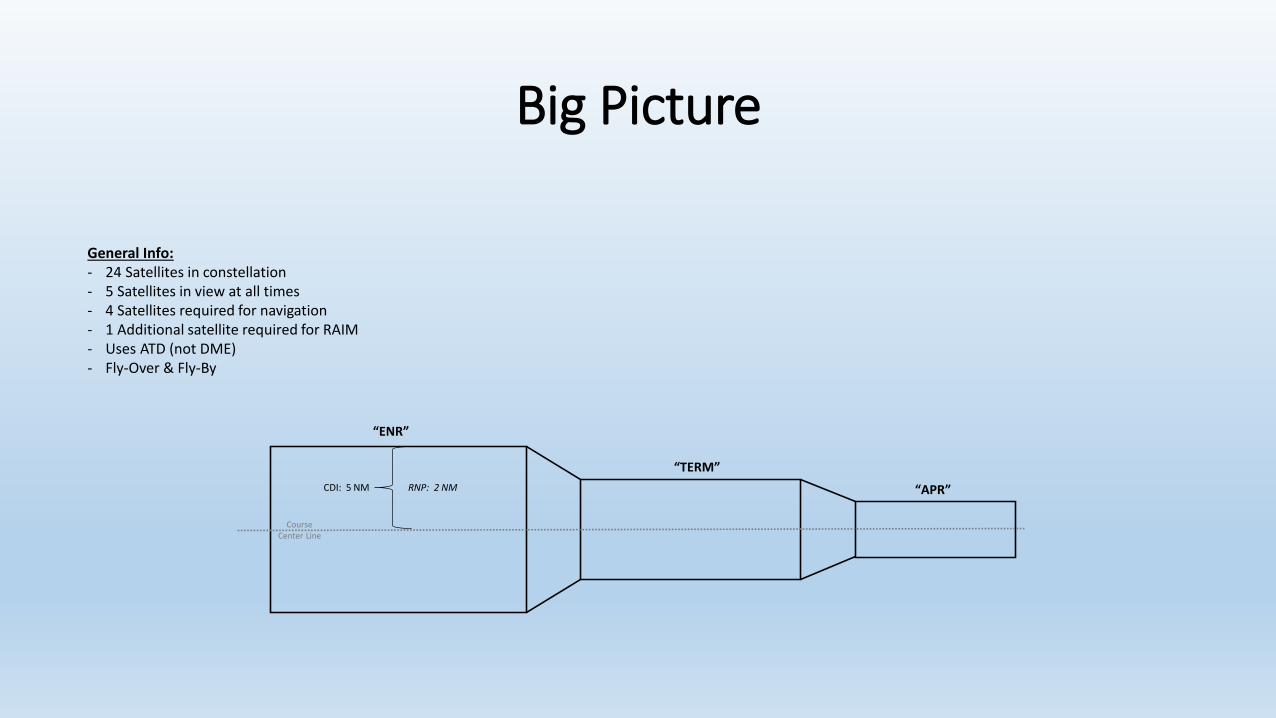
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
CDI: 5 NM RNP: 2 NM
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
CDI: 5 NM RNP: 2 NM
CDI: 1 NM RNP: 1 NM
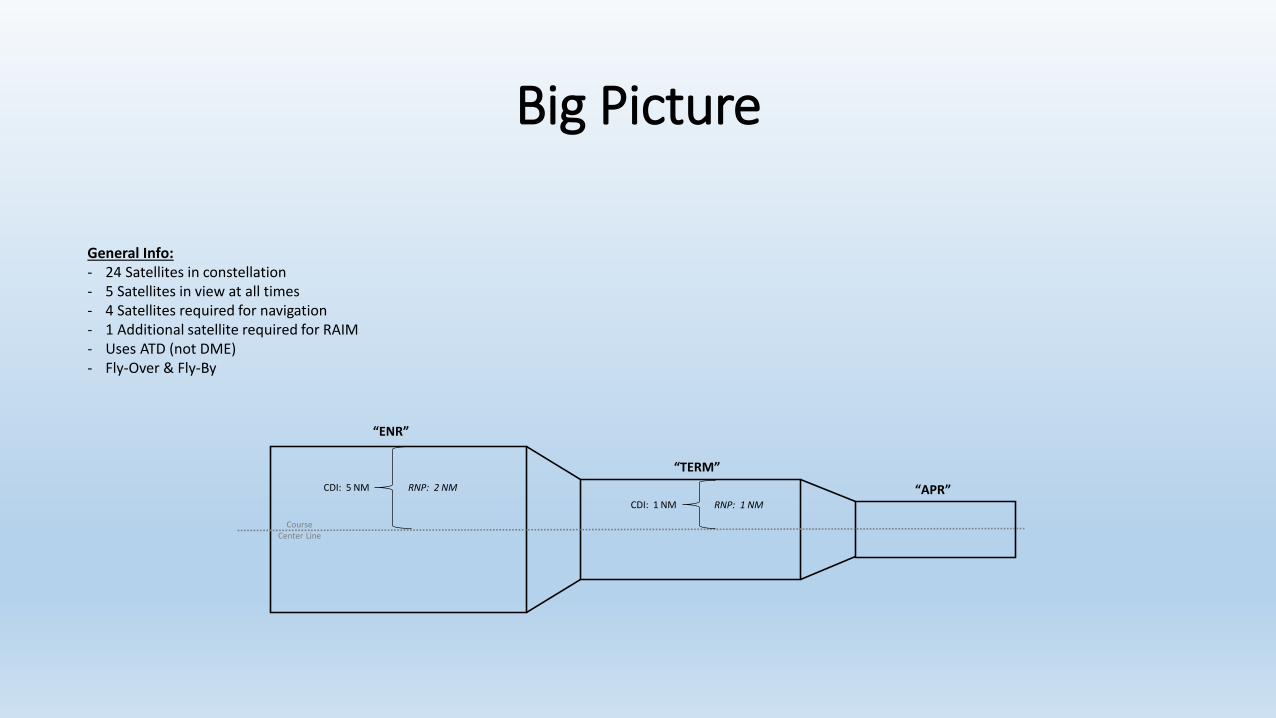
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
CDI: 5 NM RNP: 2 NM
CDI: 1 NM RNP: 1 NMCDI: 0.3 NM RNP: 0.3 NM
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
CDI: 5 NM RNP: 2 NM
CDI: 1 NM RNP: 1 NM
<30 NM & <15,000 Ft (above airport elev)
“TERM” Flashes for 15 sec
CDI: 0.3 NM RNP: 0.3 NM
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
CDI: 5 NM RNP: 2 NM
CDI: 1 NM RNP: 1 NM
<30 NM & <15,000 Ft (above airport elev)
“TERM” Flashes for 15 sec
>33 NM or >16,000 Ft (above airport elev)
“ENR” Flashes for 15 sec
CDI: 0.3 NM RNP: 0.3 NM
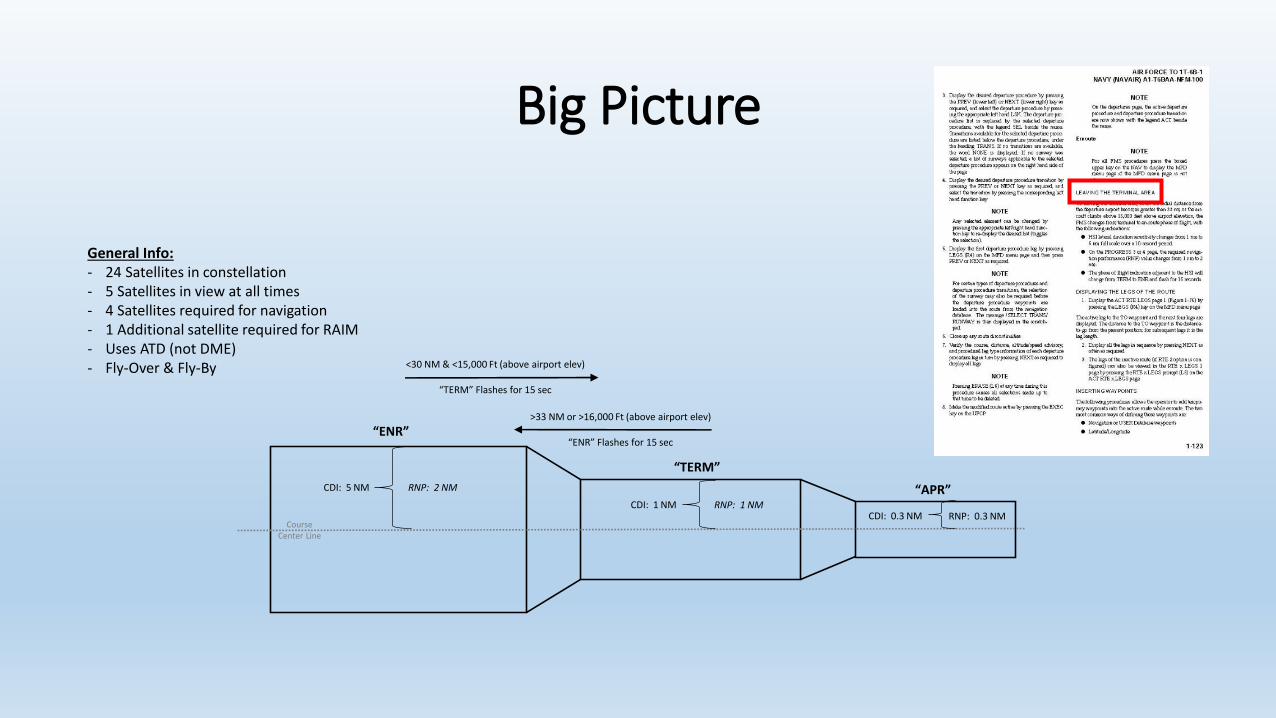
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
CDI: 5 NM RNP: 2 NM
CDI: 1 NM RNP: 1 NM
<30 NM & <15,000 Ft (above airport elev)
“TERM” Flashes for 15 sec
>33 NM or >16,000 Ft (above airport elev)
“ENR” Flashes for 15 sec
CDI: 0.3 NM RNP: 0.3 NM10 sec Scale
Change
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
CDI: 5 NM RNP: 2 NM
CDI: 1 NM RNP: 1 NM
<30 NM & <15,000 Ft (above airport elev)
“TERM” Flashes for 15 sec
>33 NM or >16,000 Ft (above airport elev)
“ENR” Flashes for 15 sec
CDI: 0.3 NM RNP: 0.3 NM10 sec Scale
Change
3 NM Gate
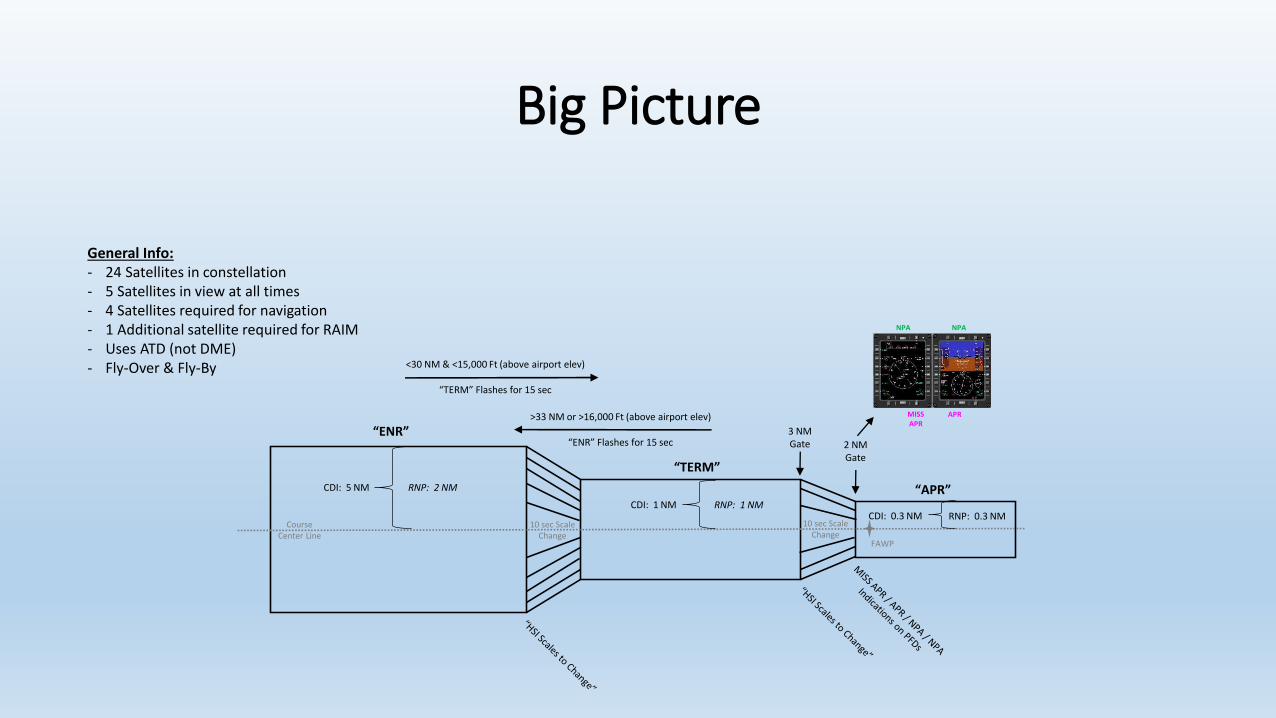
FAWP
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
CDI: 5 NM RNP: 2 NM
CDI: 1 NM RNP: 1 NM
<30 NM & <15,000 Ft (above airport elev)
“TERM” Flashes for 15 sec
>33 NM or >16,000 Ft (above airport elev)
“ENR” Flashes for 15 sec
CDI: 0.3 NM RNP: 0.3 NM10 sec Scale
Change
3 NM Gate
FAWP
10 sec Scale Change
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”
CourseCenter Line
CDI: 5 NM RNP: 2 NM
CDI: 1 NM RNP: 1 NM
<30 NM & <15,000 Ft (above airport elev)
“TERM” Flashes for 15 sec
>33 NM or >16,000 Ft (above airport elev)
“ENR” Flashes for 15 sec
CDI: 0.3 NM RNP: 0.3 NM10 sec Scale
Change
3 NM Gate
FAWP
10 sec Scale Change
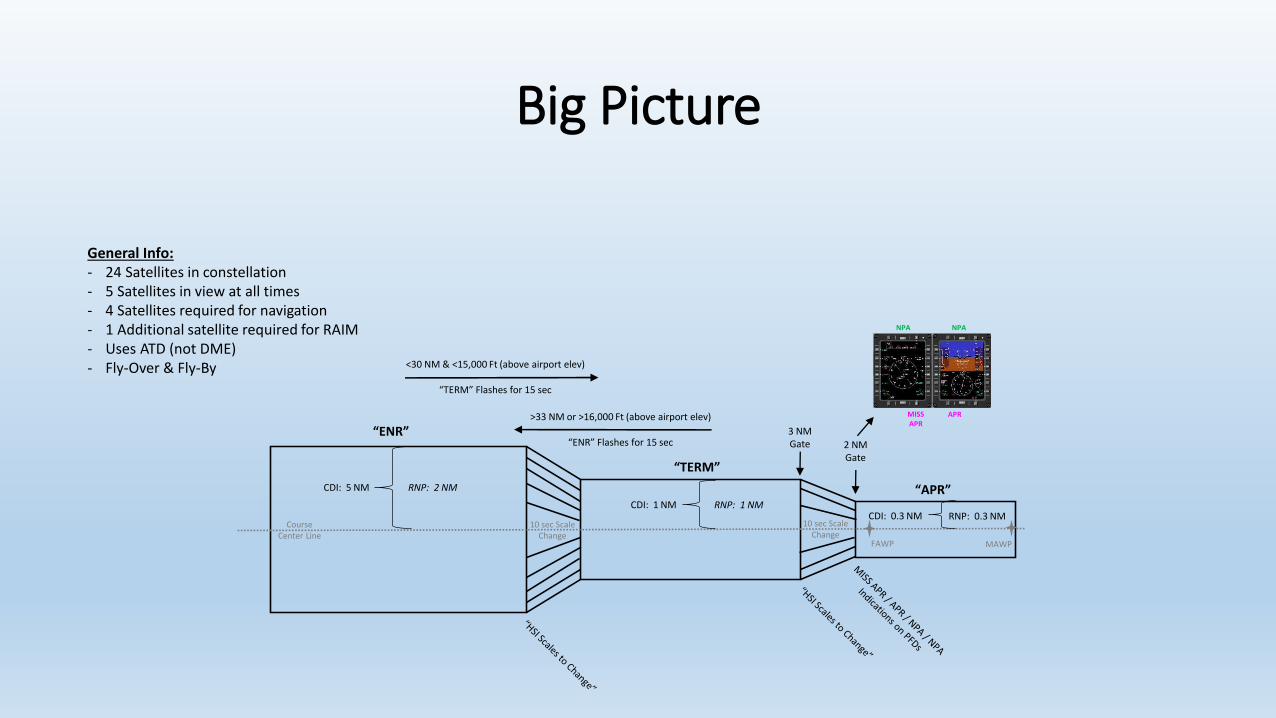
2 NM Gate
MISSAPR
APR
NPANPA
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Big Picture
“ENR”
“TERM”
“APR”CDI: 5 NM
CDI: 1 NMCDI: 0.3 NM
RNP: 2 NM
RNP: 1 NMRNP: 0.3 NM
FAWP MAWP
<30 NM & <15,000 Ft (above airport elev)
“TERM” Flashes for 15 sec
>33 NM or >16,000 Ft (above airport elev)
“ENR” Flashes for 15 sec3 NM Gate 2 NM
Gate
10 sec Scale Change
10 sec Scale Change
MISSAPR
APR
NPANPA
CourseCenter Line
General Info:- 24 Satellites in constellation- 5 Satellites in view at all times- 4 Satellites required for navigation- 1 Additional satellite required for RAIM- Uses ATD (not DME)- Fly-Over & Fly-By
Summary
• Be familiar with common GPS/FMS terms
• Understand the GPS Constellation and operation
• Understand RAIM and be able to verify proper RAIM indications
• Understand GPS receiver operations to include alignment & database verification
• Comprehend the specifications of the three flight phases of the FMS GPS
• Understand procedures and concepts associated with fly-over & fly-by waypoints


















