
Geodätische Messtechnik - Prof. Dr. H. Ingensand ETH...
14
1 ETH Zürich Geodätische Messtechnik - Prof. Dr. H. Ingensand Elektrooptische Distanzmessung Elektrooptische Distanzmessung Distanzmessertechnologien J. Hinderling R. Koechle K.Siercks Literaturverzeichnis Literaturverzeichnis Burnside, C.D.: Electromagnetic distance measurements, 2nd ed., Granada, London (1982) Deumlich,F.Staiger R.: Instrumentenkunde der Vermessungstechnik, 9.Auflage, Verlag Wichmann (2002) Grimm, K., Frank, P. Distanzmessung nach dem Laufzeitmessverfahren mit geodaetischer Giger, K.: Genauigkeit; Distomat WILD DI3000, Firmenschrift, Heerbrugg (1986) Joeckel R.: Elektronische Entfernungs- und Richtungsmessung, Wittwer Verlag, Stuttgart, (1995) Kahmen, H.: Elektronische Messverfahren in der Geodaesie, 2. Auflage, Wichmann Verlag (1978) Kahmen, H. : Vermessungskunde. Verlag Walter de Gruyter, 19.Auflage (1997) McCormac, J.: Surveying, 5th edition, Wiley (2004) RCA: Electro-Optics Handbook Rueger, J.M.: Electronic Distance Measurement, 3rd ed., Springer (1990) Scherrer, R.: Distanzreduktion bei Infrarot-Distanzmessern, Firmenschrift, Heerbrugg (1982) Zetsche, H.: Elektronische Entfernungsmessung, Wichmann Verlag (1979) Diverse Patente der Klasse G01S 7/48 Fachliteratur bei Trimble, Leica, Topcon, Sokkia, Pentax, ... (Internet) ETH Zürich Geodätische Messtechnik - Prof. Dr. H. Ingensand Inhalt Inhalt 1 Die Bestimmung der Lichtgeschwindigkeit Fizeau Experiment Interferometrie (Michelson, HP) 2 Grundlagen zu den Funktionsprinzipien EDM Methoden der Streckenmessung Elektrooptische EDM-Module in Messsystemen Funktionsprinzip elektrooptischer Distanzmesser Formen der Signalmodulation und Auswertemethoden 3 Funktionsprinzipien Pulslaufzeit Phasen Chirp Signalanalyse 4.0 Fehler, Abweichungen, Systematiken ETH Zürich Geodätische Messtechnik - Prof. Dr. H. Ingensand Hippolyte FIZEAU 1819-1896 Eine aufwendige Versuchsanordnung, die grosses experimentellen Geschick erfordert, stammt von Fizeau aus dem Jahre 1849 Dabei musste wegen des bekannten grossen Wertes der (300000 Km/s) Lichtgeschwindikeit ein möglichtst grosser Lichtweg ca. 8.3 Km hergestellt werden. Bestimmung der Lichtgeschwindigkeit www.quarks.de ETH Zürich Geodätische Messtechnik - Prof. Dr. H. Ingensand Fizeauprinzip Fizeauprinzip Aus der Zeit t, in der eine Lücke der nächsten Lücke folgte, und aus der Entfernung s des Spiegels vom Zahnrad errechnete sich die Lichtgeschwindigkeit zu c = 2s / t c .....Lichtgeschwindigkeit 2s ...Weg für Hin- und Hergang t ......Zeit für Hin- und Hergang www.ebgymhollabrunn.ac.at Zunächst versetzt man das Zahnrad in raschen Rotation. Während des Zunehmens der Rotationsgeschwindigkeit stellte man zuerst eine Abschwächung der Intensität des reflektierten Lichtstrahls fest, weil er durch die Zahnlücke ging und dann durch den folgenden Zahn verdeckt wurde. Aus der Erhöhung der Rotationsgeschwindigkeit trat wieder ein Maximum an Helligkeit ein (ging durch Zahnlücken). Dreht sich das Zahnrad genau um einen Zahn weiter, während der Lichtstrahl zum Spiegel und wieder zurück gelaufen ist, so fällt der Lichtstrahl durch zwei Lücken ETH Zürich Geodätische Messtechnik - Prof. Dr. H. Ingensand Das Das Fizeau Fizeau Experiment Experiment Siercks 2004 s m c s m c heute Fizeau / 10 9979 . 2 / 10 15 . 3 8 8 ⋅ = ⋅ =
-
Upload
duongquynh -
Category
Documents
-
view
227 -
download
0
Transcript of Geodätische Messtechnik - Prof. Dr. H. Ingensand ETH...

1
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Elektrooptische DistanzmessungElektrooptische Distanzmessung
Distanzmessertechnologien
J. HinderlingR. KoechleK.Siercks
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
LiteraturverzeichnisLiteraturverzeichnis
Burnside, C.D.: Electromagnetic distance measurements, 2nd ed., Granada, London (1982)
Deumlich,F.Staiger R.: Instrumentenkunde der Vermessungstechnik, 9.Auflage, Verlag Wichmann (2002)
Grimm, K., Frank, P. Distanzmessung nach dem Laufzeitmessverfahren mit geodaetischerGiger, K.: Genauigkeit; Distomat WILD DI3000, Firmenschrift, Heerbrugg (1986)
Joeckel R.: Elektronische Entfernungs- und Richtungsmessung, Wittwer Verlag, Stuttgart, (1995)
Kahmen, H.: Elektronische Messverfahren in der Geodaesie, 2. Auflage, Wichmann Verlag (1978)
Kahmen, H. : Vermessungskunde. Verlag Walter de Gruyter, 19.Auflage (1997)
McCormac, J.: Surveying, 5th edition, Wiley (2004)
RCA: Electro-Optics Handbook
Rueger, J.M.: Electronic Distance Measurement, 3rd ed., Springer (1990)
Scherrer, R.: Distanzreduktion bei Infrarot-Distanzmessern, Firmenschrift, Heerbrugg (1982)
Zetsche, H.: Elektronische Entfernungsmessung, Wichmann Verlag (1979)
Diverse Patente der Klasse G01S 7/48Fachliteratur bei Trimble, Leica, Topcon, Sokkia, Pentax, ... (Internet)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
InhaltInhalt
1 Die Bestimmung der Lichtgeschwindigkeit
Fizeau ExperimentInterferometrie (Michelson, HP)
2 Grundlagen zu den Funktionsprinzipien EDM
Methoden der StreckenmessungElektrooptische EDM-Module in MesssystemenFunktionsprinzip elektrooptischer DistanzmesserFormen der Signalmodulation und Auswertemethoden
3 FunktionsprinzipienPulslaufzeitPhasenChirpSignalanalyse
4.0 Fehler, Abweichungen, Systematiken
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Hippolyte FIZEAU 1819-1896
Eine aufwendigeVersuchsanordnung, die grosses experimentellen Geschick erfordert, stammt von Fizeau aus dem Jahre1849
Dabei musste wegen des bekanntengrossen Wertes der (300000 Km/s) Lichtgeschwindikeit ein möglichtstgrosser Lichtweg ca. 8.3 Km hergestellt werden.
Bestimmung der Lichtgeschwindigkeit
www.quarks.de
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
FizeauprinzipFizeauprinzip
Aus der Zeit t, in der eine Lückeder nächsten Lücke folgte, und ausder Entfernung s des Spiegels vomZahnrad errechnete sich die Lichtgeschwindigkeit zu
c = 2s / tc .....Lichtgeschwindigkeit2s ...Weg für Hin- und Hergangt ......Zeit für Hin- und Hergang
www.ebgymhollabrunn.ac.at
Zunächst versetzt man das Zahnradin raschen Rotation.
Während des Zunehmens derRotationsgeschwindigkeit stellteman zuerst eine Abschwächung derIntensität des reflektiertenLichtstrahls fest, weil er durch die Zahnlücke ging und dann durch den folgenden Zahn verdeckt wurde. Aus der Erhöhung derRotationsgeschwindigkeit tratwieder ein Maximum an Helligkeitein (ging durch Zahnlücken). Drehtsich das Zahnrad genau um einenZahn weiter, während der Lichtstrahlzum Spiegel und wieder zurückgelaufen ist, so fällt der Lichtstrahldurch zwei Lücken
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
DasDas FizeauFizeau ExperimentExperiment
Siercks 2004
smc
smc
heute
Fizeau
/109979.2
/1015.38
8
⋅=
⋅=

2
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
InterferometrieInterferometrie-- MessungMessung mitmit derder TrTräägerwellegerwelle ohneohne ModulationModulation-- mitmit kohkohäärentemrentem LichtLicht
InterfometertypenInterfometertypen
MichelsonMichelson2 2 FrequenzFrequenz Interferometer HPInterferometer HP
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Hell dunkel
+
InterferometerInterferometer ((MichelsontypMichelsontyp) keine Modulation, koh) keine Modulation, kohäärentes Lichtrentes Licht
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
TeilerwTeilerwüürfelrfel InterferenzenInterferenzen
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
LaserinterferometrieLaserinterferometrie DistanzmessungDistanzmessung durchdurch InterferenzenInterferenzen
Wellen Anzahl :2
NND ⋅=λ
Die Auflösung dieses Verfahrens beträgt also λ/2 und damit bei λ = 0.6 mm etwa 0.3 mm.
Diese Auflösung lässt sich jedoch durch elektronische Interpolation weiter steigern.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
ZweiZwei--FrequenzFrequenz InterferometrieInterferometrie HP InterferometerHP Interferometer
2. Strahl ist leichtversetzt
Doppler-Messprinzip
Fährt ein Objekt mit der Geschwindigkeit v radial gegen eine Referenzstation, die einen Strahl mit Frequenz f1 aussendet, so hat die am Objekt reflektierte Welle infolge des Dopplereffekts die Frequenz f1 + ∆f mit:
windigkeitLichtgesch :thwindigkeiObjektgesc :2 1 cvcvff =∆
f1 + ∆f
v
Schwebung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
HP InterferometerHP Interferometer
Die Differenz ∆f lässt sich als Frequenz der Schwebung messen, die bei der Überlagerung von ausgesandter und reflektierter Welle entsteht. Eine Frequenz lässt sich durch Auszählen der Anzahl Perioden pro Zeiteinheit messen:
tptpf ∆∆=∆ vall Zeitinterim quenzDopplerfreder Perioden Anzahl :
11
11
1 222 fc
tpf
fcfv =
∆⋅⋅
=⋅∆
=⋅∆
= λλλ
Da der Weg s gleich dem Integral der Geschwindigkeit v über die Zeit ist, gilt:
21λ⋅= ps

3
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
HP HP ZweifrequenzinterferometerZweifrequenzinterferometer (Dopplereffekt)(Dopplereffekt)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
LLäängenngen--InterferometerInterferometer
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Die Die EntwicklungEntwicklung elektronischerelektronischer DistanzmesserDistanzmesser
-- BisBis anfanganfang 80er 80er JahreJahre DistanzmessungDistanzmessung > 4 Km > 4 Km mitmitMikrowellengerMikrowellengeräätenten GPSGPS
-- heuteheute ausschliesslichausschliesslich mitmit elektrooptischenelektrooptischen VerfahrenVerfahren
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Mikrowellendistanzmesser Mikrowellendistanzmesser „„TellurometerTellurometer““
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
GeodimeterGeodimeter 2A Der erste geod2A Der erste geodäätische Distanzmesser ca. 1968tische Distanzmesser ca. 1968
This Geodimeter NASM-2A is an electronic-optical instrument for first-order geodetic distance measuring purposes, and is capable of measuringdistances up to 50 kilometres. The instrumentconsists physically of two units, the 'measuringunit', housing the electronic equipment, and the'optical unit', containing the light conductor and the two large spherical mirrors. With the two unitscombined, the instrument weighs approximately100 kilograms.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
EntwicklungenEntwicklungen
Geodimeter 6A
HP
4
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
LunarLunar Laser Ranging Laser Ranging WettzellWettzell
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Mobile Mobile SatelliteSatellite Laser Ranging SystemeLaser Ranging Systeme
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
3D Sensor 3D Sensor A new Technology in A new Technology in ““OneOne--ShotShot”” 33--D Data CaptureD Data Capture
RT Close Range Scanning
One Shot
CMOS Chip160 x 124 pixel array
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Elektrooptische Elektrooptische EDMEDM--ModuleModule in Messsystemenin Messsystemen
EDM-Modul
3D-Scanner2D-Profiler
EDM Modul alsAufsatzgerät auf el. Theodolit
EDM Modul in Tachymeter integriert.(Robotic Station)
Elektronischer Hand-Distanzmesser
Lasertracker
1993: LEICA DISTO1996: DISTOm1997: SOKKIA MM301998: Bosch DLE30Laser2002: CarlCeiss Jena DM-X2002/3: Hilti PD30 (Jenoptic: PD30)2003: Leica DISTO Plus Graphics2005: Hilti PD32
1970: Zeiss Rec ELTA 141971: AGA Geodimeter 7001975: HP 3820A1978: WILD TC1...1995: LEICA TCA1800 reflektorlos (RL)1998: LEICA TCR11032000: Trimble 600S DR200+ / RL long range2001: PENTAX R123N mit Autofokus2002: LEICA TCAP1100 mit Powersearch2003: Sokkia Serie 030R (350m reflektorlos)2004: Leica TPS1200/R300 /
Topcon GPT8200 (1200m) ….
1995: Cyrax von Leica-Geosystems1996: Callidus (Dtl)1999: Riegl (Austria)2002: IQ-Sun GmbH(Dtl) (= Phasenmesser)2002: Mensi GS2002003: Leica HDS4500 (Z+F) 2005: ….
1992: LEICA DIOR3002S1996: SOKKIA MiniMeter
1992: First Lasertracker LT2001995: Absolute Lasertracker LTD5002001: Coherent Lasertracker CMM LR2002005: ….
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Grundlagen zu den Funktionsprinzipien EDMGrundlagen zu den Funktionsprinzipien EDM
2.1 Methoden der Streckenmessung
Streckenmessung
mechanisch
Mikrowellen
Trägerfrequenzen
Lichtwellen
elektronisch
optisch visuell
Ultraschall SchallMesslatte
Band
Draht
Taster
Doppelmeter
Interferometer Radar
Triangulation Ultrawideband Ranging
Phasenmessung (GPS, RIM)
Laufzeitmessung (Lidar, 3D-Radar)
FMCW (Frequency Modulated Continuous Wave Method)
Basis am Zielort
Basis am Standort(Telemeter)Stereobildaufnahme
Doppelbilddistanzmeter
Mod
ulie
rtun
mod
ulie
rt
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
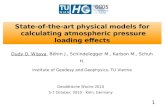
TriangulationstasterTriangulationstaster
CCDLaserdiode
Messbereich
D=F(x)x
D

5
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Geometrische Distanzbestimmung: Geometrische Distanzbestimmung: TriangulationssensorTriangulationssensor
Triangulationssensoren senden einen Laserstrahl aus, der je nach Abstand vom Messobjekt in unter-schiedlichem Winkel reflektiert wird. Der reflektierte Strahl wird über Umlenkspiegel und Optik auf eine CCD oder PSD abgebildet
http://www.lap-laser.com/d/laser_g/prod/mess.html
Laser
CCD
Messbereich
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
EDM EDM ffüürr GeodGeodäätischetische AnwendungenAnwendungen
-- InformationsInformationsüübertragungbertragung und und MorphologieMorphologie-- GrundaufbauGrundaufbau-- TrTräägerfrequenzengerfrequenzen-- ReichweiteReichweite (Absorption, Dispersion, (Absorption, Dispersion, LichtquellenLichtquellen))-- AugensicherheitAugensicherheit
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
The Information TransferThe Information Transfer
SourceCoding
BiphasenAmplitudenPolarisation
Channel Decoding Sink
Noise
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
DistanzmessungDistanzmessung ((KomponentenKomponenten, , ÜÜbertragungsmediumbertragungsmedium, , MessobjektMessobjekt))
Siercks 2004
Elektronik Optik
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Die Die maximalemaximale MessdistanzMessdistanz hhäängtngt abab von:von:
Energie im Sende-Strahl Signalquelle / Augensicherheit
Divergenz des Sendestrahles Beugung
Atmosphärische Bedingungen Streuung, Dispersion
Eigenschaften des Ziels Reflektivität
Umgebende Lichtquellen/Streulicht Störsignal, Rauschen
Empfängerempfindlichkeit Apertur,Empfängerschaltung
Messmethode Nutzungsgrad der Signalinformation
Geforderte Messgenauigkeit Zeitbasis, Messzeit
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand

6
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Grundlagen zu den Funktionsprinzipien EDMGrundlagen zu den Funktionsprinzipien EDM
2.7 Einfluss der Atmosphäre auf die Distanzmessung / Absorption
Atmosphären-Modelle: LOWTRAN, HITRAN, MODTRAN, PC-TRAN, .....
Pulslaser
Pulslaser
Laser für Reflektoren
Laser für reflektor-lose Ziele
Pulslaser
Absorption als Definition des Verhältnisses von Empfangs- zu Sendeleistung:
τIEIS
10 Abskoeff− 2⋅ Distanz⋅
Beispiel: Distanz = 1km
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
2. 2. Grundlagen zu den Funktionsprinzipien EDMGrundlagen zu den Funktionsprinzipien EDM
Beispiel: Gruppenindex einer lokalen Absorptionslinie von Wasserdampf bei der Wellenlänge λ = 946.55081570 nm.
x-Achse: Frequenz der optischen Strahlungy-Achse: Skala gilt für den Gruppenbrechungsindex.
Fazit: Distanzmessfehler bis gegen +/-100ppm (=+/-100mm auf 1km) möglich.
Literatur: Galkin, Tatevian; Journal of Geodesy (1997) 71: 680-684.
Laserdiode Luft / H2O
1000ppm
500ppm
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Grundlagen zu den Funktionsprinzipien EDMGrundlagen zu den Funktionsprinzipien EDM
Relative spektrale Augenempfindlichkeit und Laser
Seit 2000:High-Power Mikro-Chip Laser
Aufgelistet sind Wellenlängen von typischen Lasern verwendet in geodätischenDistanzmessern.
In Zukunft:Gepulste Faserlaser
Standard Strahlungsquelle:Halbleiter-Laser
Dämmerungssehen
Tagsehen
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
EDM Messtechnologien (EDM Messtechnologien (ÜÜbersicht)bersicht)
Messung mit der unmodulierten TrägerwelleMichelson Interferometer
Pulslaufzeitmessung (TOF)Laserscanner, Handdistanzmesser,GPS Codemessung…
Amplitudenmodulation (AMCW)Die meisten geodätischen EDM
Polarisationsphasenmodulation (PMCW)Mekometer
Frequenzmodulation der optischen Welle(O- FMCW)Laserradar
Gemischte FormenLeica Pinpoint
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Formen der Signalmodulation und AuswertemethodenFormen der Signalmodulation und Auswertemethoden
FMCWFrequenzmodulation, lineares Frequenz-Chirping (=Frequency Modulated Continuous Wave)
NeuSystem Analyzer: ähnlich Phasenmesser aber mit ausgewähltem Set an Modulationsfrequenzen und „Laufzeitmesserauswertung
Fizeau-PrincipleNullphasenabgleich, Nullphasenmessung durch Frequenzanpassung
-> Frequenzmessung
Phase-Meter - PhasenvergleichsschaltungPhasenvergleichsschaltung, Phasenvergleichsalgorithmus
Time-of-Flight mit digitaler Signalabtastung und Aufsummierung
Hochfrequenzabtastung von SignalimpulsenMöglichkeit der Signalsummation (Signal-Sampling)
Spread SpectrumKorrelationsempfänger von Zufallssignalfolgen (PN-Code)
Time-of-FlightZeitmesschaltung (Start/Stopp eines Einzelimpulses):
EDM-TechnologieAuswertemethoden (empfängerseitig)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
PulslaufzeitverfahrenPulslaufzeitverfahren

7
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
ImpulsmessverfahrenImpulsmessverfahren
Sender
Empfänger
Messsignal senden
t0=0
∆t
D tncD o ∆⋅⋅=
21
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Laufzeitmessung bei GPS (Korrelationsverfahren)Laufzeitmessung bei GPS (Korrelationsverfahren)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Laufzeit tm = n*T + ta + tb
Stabiler Referenzoszillator mit einer Gangenauigkeit von 1ppm.
Hauptereignisse: 1: Start
3: Stopp
Analoge Zeitinterpolation mittels Time-Amplitude-Converter (TAC) zur Bestimmung von ta und tb.
Messgenauigkeit durch Zeitinterpolation auf 1mm = 1/10000 der Periode T=66ns=10m am Beispiel des DI3000S.
Funktionsprinzip des LaufzeitmessersFunktionsprinzip des Laufzeitmessers
Zeitmess-Schaltung mit analoger Zeitinterpolation
Status heute:•1-Chip-Lösungen (= Time Digital Converter)•Zeitliche Abtastung mit 16Bit digitalisiert•Least significant bit (LSB) = 8mm Auflösung (=1psec)• => 8mm*2^16 = 524m Eindeutigkeit (Maximal Range).
Triggerereignisse:
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Funktionsprinzip des Laufzeitmessers (Funktionsprinzip des Laufzeitmessers (vrglvrgl. Scannen). Scannen)
PowerSearch von LEICA als Beispiel eines Laufzeitmessers
PowerSearch ist ein Sensor zum Suchen und Lokalisieren von Retroreflektoren, um das Zielobjekt aber eindeutig zu erkennen benutzt die Vorrichtung das Prinzip eines Laufzeitmessers.
Funktion: Zielsuche mittels Rotation um eine vertikale Achse eines ebenfalls vertikalen Sendefächers. Wird ein Signal von einem Zielobjekt reflektiert so wird dies vom Detektor empfangen und an eine Auswerteeinheit zur Merkmalsanalyse weitergegeben. Ist ein Reflektor als Zielobjekt erkannt, so wird der Scan-Vorgang abgebrochen und das aufgefundene Ziel präzise angefahren.
Aufzufindende Reflektoren
Scan-Bewegungbei der Zielsuche
Sende- und Empfangsoptik in biaxialer Anordnung.
Sendefächer erzeugt durch eine Pulslaserdiode.
Suchdistanzen bis 750m.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Funktionsprinzip des Laufzeitmessers (Scannen mit vertikalem FFunktionsprinzip des Laufzeitmessers (Scannen mit vertikalem Fäächer)cher)
Signalauswertung im Empfangsteil mit Zielerkennung
Horizontalwinkeloder Laserpuls-Nummer
Distanzachse von 0m bis 750m
Signalamplitude
Der zurückgeworfene Laserimpuls wird mit 50MHz digitalisiert (abgetastet) und einer Auswerteeinheit (RISC-Prozessor & FPGA) zugeführt. Gemessen werden Signalmplitude, Distanz und horizontaler Scan-Winkel.Während des Scan-Vorgangs entsteht dadurch eine 3 dimensionale Landschaft. Die Peaks stellen aufgefundene Zielobjekte dar.
Merkmale des Empfangssignals zur Erkennung eines Zielobjekts:•Pulshöhe -> Reflexionsgrad•Pulsbreite -> Zielausdehnug, Beispiel: Strassenschilder•Pulslänge -> Harte Ziele / weiche Ziele wie Längsreflexe an Tunnelwänden
Powersearch identifiziert ein aufgefundenes Zielobjekt durch Vergleich der gemessenen Merkmale mit intern abgelegten Toleranzwerttabellen.
Fremdreflexe werden dadurch übergangen und nicht angefahren wie:
•Strassenschilder•Autoscheinwerfer•Fensterscheiben•Sonnenreflexe•Nebel oder Rauchfahnen
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
PhasenmessverfahrenPhasenmessverfahren-- ModulationsverfahrenModulationsverfahren-- AuswerteverfahrenAuswerteverfahren

8
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
PhasenvergleichsverfahrenPhasenvergleichsverfahren9.11 Elektronische
Distanzmessung
Beim Phasenvergleichsverfahren wird einer kontinuierlich ausgestrahlten (kurzwelligen)Trägerwelle eine langwelligesinusförmiges Messwelle auf-moduliert. Die aufmodulierte Welle dient dann als Masseinheit für die Streckenmessung.Schrittweite ∆t [s] 0.00000003
UmgebungsvariablenBrechungsindex n [-] 1Geschwindigkeit c0 [m/s] 300000000
TrägerwelleFrequenz f [s-1] 40000000Wellenlänge λT [m] 7.5
MesswelleFrequenz f [s-1] 2000000Wellenlänge λM [m] 150
Trägerwelle
Messwelle
Signal (AM)
Modulation
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Grundlagen zu den Funktionsprinzipien EDMGrundlagen zu den Funktionsprinzipien EDM
Formen der Signalmodulation und Auswertemethoden
time
time
time
s(t)
T
Trägersignal rechteckig:Bps: Leica TD5005
Bsp: Leica: TC800
Bsp: Leica TPS2000
Modulationsformen des Sendesignals s(t):
Phasenmessung mit rechteckförmigem Impulszug:
Phasenmessung mit Burst-Modulation:
Phasenmessung mit Phasenumtastung des Trägers: (PSK=Phase Shift Keying)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
BiphaseBiphase--Modulation Modulation derder TrTräägerfrequenzgerfrequenz Kombination von ModulationenKombination von Modulationen
Zur eigentlichen Distanzmessung werden auf beiden Trägerfrequenzen Codes durchBiphasenmodulation aufmoduliert, deren Laufzeit durch Korrelation und Uhrenvergleichbestimmt wird. Der sogenannte Precise-Code (P-code) und der Coarse Aquisition Code(C/A-Code). Mit dem P-Code ist es möglich die Position mit einer Genauigkeit von 10- 20m zu bestimmen, mit dem für zivile Benutzer zugänglichen C/A Code erreicht man eineGenauigkeit von 100 m.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
PhasenvergleichsverfahrenPhasenvergleichsverfahren
D ⎟⎠⎞
⎜⎝⎛ +⋅=
πϕλ22
1 ND
λd
Sender
Empfänger
Mλ
RestphaseAmbiguitiesAmbiguities
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
PhasenvergleichsverfahrenPhasenvergleichsverfahren
D
9.11 Elektronische Distanzmessung
Ein eindeutiges Ergebnis für die Streckenmessung liegt dann vor, wenn die Massstabswellenlänge λ grösser als die zu messende doppelte Maximaldistanzist.
Sender
Empfänger
DM >2λ
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Bestimmung der Vielfachen (Bestimmung der Vielfachen (AmbiquitiesAmbiquities))
150 KHz = 2 Km
1.5 Mhz = 200 m
15 MHz = 2m
Feinfrequenz
2. Grobfrequenz
1. Grobfrequenz
Phasenmessung
789
88.2
8.437
788.437 [m]

9
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Kombination Amplitudenmodulation und Kombination Amplitudenmodulation und BiphasenmodultatiomBiphasenmodultatiom
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Phasenmessung: Multimodulation des Z&F ScannersPhasenmessung: Multimodulation des Z&F Scanners
Dipl.Arbeit ZoggETHZ 2003
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Polarisationsmodulation (Polarisationsmodulation (MekometerprinzipMekometerprinzip))
0
Polarisations-Strahlteilerunter einem Winkel von 45°zum Kristall wirkt alsAnalysator
linear polarisierterLaserstrahl
Indikatix (ne, no)
Kristall
λ / 4 - Platte
Reflektores liegt keineSpannung an
kein Licht gelangt aufdie Empangsdiode
Aus Diss. Loser ETHZ 2001
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Polarisationsmodulation und Polarisationsmodulation und NullphasendetektionNullphasendetektion ((MekometerMekometer))
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
OptischerOptischer und und elektronischerelektronischer AufbauAufbau von von DistanzmessernDistanzmessern
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Optimaler Optimaler TachymeterTachymeter ffüür natr natüürliche und reflektorunterstrliche und reflektorunterstüützte Zieletzte Ziele
LEICA-TCR als Tachymeter mit 2 Sendereinheiten,einer roten mit kollimiertem Strahl für reflektorlose Ziele undeiner infraroten mit divergentem Strahl für Prisma-Ziele:
Messstrahl: sichtbar, praktisch keine Divergenz
Messstrahl: unsichtbar, grosse Divergenz

10
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Morphologie und OptikschemaMorphologie und Optikschema bei bei TachymeternTachymetern
Morphologie:PowerSearch mit biaxialer Optik ist im Theodolitdeckel integriert:
Senderöffnung Empfängeröffnung
Fernrohrobjektiv des Theodolits
Alle 3 Achsen sind parallel zueinander ausgerichtet.
Optikschema: (Top view)
Pulsmodulation ähnlich wie bei einem Laufzeitmesser:80nsec, 15Watt,25kHz.
erzeugt vertikalen Sendefächer
Empfänger-blende
Sendefächer: 0.2Gradx40Grad
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
M
Stop-Faser.externer Lichtweg
Start-FaserInternerLichtweg
KTP
PulslaserNd:YAG
KomparatorVerstärker APD-
Temp
Temperatur
Init Puls
start/stopp
Funktionsprinzip des LaufzeitmessersFunktionsprinzip des Laufzeitmessers
Detektionsprinzip nach dem Einzelschussverfahren (Jeder optische Impuls wird separat detektiert).
Laserdriver
PeltierDriver
Laser
Zeit-messung
Ref.Osz.
Zeitnormal 1ppm
A/D-conv.
T
Pump Laser Teilerspiegel
Sende- &Empfangsoptik
Zielobjekt
PIN-Diode
Signal-PeakDetektor
Empfangs-diode.APD
optischer Abschwächer.M=Motor
0 .. 10km
Power:3.3V5.0V etc.
12V
Mikro -Prozessor
oder
DSP
APDVorspannung200V
Datenschnittstellezum Mainboard oder Keyboard-Display
PWM
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Optikschema eines koaxialen Optikschema eines koaxialen TachymetersTachymeters (Mit symmetrischer optischer (Mit symmetrischer optischer AperturApertur))
Transmitter
Receiver
Receiver
Internalmeasurement (calibration)
externalmeasurement
Fernrohrobjektiv,gemeinsam für Sender und Empfänger
Cal-Schalter
Variables Abschwächfilter
Laserdiode
Lichtteiler Cal-Abschwächer
Lichtleiter führt zur Empfangsdiode
Problematik:Optisches Uebersprechen --> Zyklischer Phasenfehler
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Blockschema eines DistanzmessgerBlockschema eines Distanzmessgeräätestes
Überlagerungs-oszillator15.015 MHz Mischer
2Mischer 1
Kippstufe Kippstufe
HOCHFREQUENZTEIL
NIEDERFREQUENZTEIL
Impulsgeber
Display
Sender
Empfänger15 MHz
15 MHz
15 kHz15 kHz
Nach Witte
Quarzoszillator 15 MHz
Messtor
ZählerMikro-prozessor
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
PhasenmesserPhasenmesser
Analog Mixer im Empfängerteil: (In der Literatur auch als Produktdemodulator bekannt )
Elektronische Mischer zur Erzeugung der niederfrequenten Zwischenfrequenz
Merke:Im niederfrequenten Zwischenfrequenz-signal bleibt die Phase ϕo erhalten.

11
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Elektronisches Schema nach dem Elektronisches Schema nach dem HeterodyneHeterodyne PrinzipPrinzip
Prinzipschema eines Phasenmessers wie es bei den TACHYMETERN angewendet wird
Berechnete Phaseals Ergebnis
Mit einem Phase-Locked-Loop (PLL) als Frequenz-Synthesizer wird aus einem Quarzoszillator eine um ∆f verschobene Frequenz f0+∆f erzeugt. Diese ebenso quarzgenaue Frequenz mit einem DutyCycle 50% dient zum Modulieren des Senders. Der Empfangskreis ist ein sogenanntes„Superheterodyne-Empfangsprinzip“. Ein Resonanz- oder Selektivverstärker filtert die Grundharmonische des Rechtecksignals aus. Mit einem Produkt-Demodulator (Mischer) wird eine Zeittransformation auf ∆f, die Zwischenfrequenz, ausgeführt. Die Phasenmessung im zeittransformierten Bereich wird durch eine Signalabtastung (A/D-Wandlung) des ∆f-Signals und einer anschliessenden Fouriertransformation(FFT) realisiert.
Seit 1995 sind auch rein digitale Frequenzsynthesizer als Single-Chip- Bausteine kommerziell erhältlich. Diese sogenannten DDS-Chips (Direct Digital Synthesizer) ersetzen allmählich die klassische Frequenzumschalt- und PLL-Technik.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
4. 4. PhasenmesserPhasenmesser
4.4.2 Digitaler Mixer im Frequenzsynthesizer:
4.4 Elektronische Mischer zur Erzeugung der niederfrequentenZwischenfrequenz
Einflankengetriggertes D-FF:Wirkt als Speicherzelle (=Data Latch)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
0 5 .10 9 1 .10 8 1.5 .10 8 2 .10 8 2.5 .10 8 3 .10 8
0
5
10Empf-&Mischersignal: i & h
Zeitachse [sec]
10
3−
0
i tn( )h tn( )
3 10 8−×0 tn
Elektronische Mischer zur Erzeugung der Elektronische Mischer zur Erzeugung der niederfrequentenniederfrequenten ZwischenfrequenzZwischenfrequenz
Sampling Technik mit „Time Expansion" unter Anwendung eines MixersZeittransformation um den Faktor 105 mit einem breitbandigen analogen Mischer im Empfängerteil eines Distanzmessers.Die hochfrequenten, pulsartigen Eingangssignale des Mischers sind einerseits das Empfangssignal i(t) anderseits das Mischersignal h(t) direkt abgezweigt vom Frequenzsynthesizer.Die Modulationsfrequenzen der beiden Signale unterscheiden sich dabei nur wenig, eben lediglich um den Faktor 1 zu 1.00001
0 2 .10 5 4 .10 5 6 .10 5 8 .10 5 1 .10 4 1.2 .10 4 1.4 .10 4 1.6 .10 4 1.8 .10 4 2 .10 4
0
5
10Heterodynsignal (ZF im NF)
Zeitachse expanded [sec]
10
3−
0
yZF tn( )
2 10 4−×0 tn
Am Ausgang des Mischers entsteht ein niederfrequentes Signal. Man beachte die Zeitdehnung, es ist gegenüber dem Empfangssignal um 105 im zeitlichem Verhalten verlangsamt. Die Phasenmessung ist im zeittransformierten Bereich einfacher zu handhaben.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
DirectDirect Digitaler Synthesizer mit Digitaler Synthesizer mit PLLPLL--FrequenzumformerFrequenzumformer
PLL:Die Ausgangsfrequenz des DDS-Bausteins wird über ein Datenwort (Tuning Word) gesetzt. Die Frequenz wird auf einen Phasencomparator gegeben, welcher einen ppm-genauen VCO-Oszillator ansteuert. Dieser VCO-Oszillatorerzeugt eine um den Faktor N höhere Frequenz mit hoher Phasenreinheit.
Direct Digital Synthesizer
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Die PhasenmessDie Phasenmess--EinheitEinheit
Heute sind ausschliesslich digitale Phasenmessschaltungen gebräuchlich.
Alle Distanzmesser sind heute mit AD-Wandlern und Mikroprozessoren oder gleichwertigen Prozessoren ausgestattet. Die Phasenmessung ist daher verbunden mit einer digitalen Signalauswertung. Das am AD-Wandler anliegende NF-Signal wird durch diesen abgetastet und die Daten fortlaufend in einem Speicher (RAM) abgelegt. Am Schluss der Messung wird die Phasenverschiebung anhand der im Datenspeicher abgelegten Signalform mittels Kurvenfit, Fouriertransformation oder einer anderen algorithmischen Auswertemethode berechnet.
Phase ϕo
Signal und Phasenberechnung im Speicher:
Phase ϕo
Taktsignal
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
NeueNeue DistanzmesstechnologienDistanzmesstechnologien
ChirpChirpSystem AnalyzerSystem Analyzer

12
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Frequenzmodulation (FM)Frequenzmodulation (FM)
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
FMCW Distanzmesser (FMCW Distanzmesser (ChirpChirp Technologie)Technologie)
Frequency
100GHz
2 milliseconds
Delta f is in low megahertz band : Range = delta f / 0.667 (in microns)
delta t = 2 x range / c (speed of light)
1 micron = 1.6 x 10 –14 seconds
Time200THz
received signal
transmitted signal
0
001
Vrgl. Radartechnologie
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Modulation des TrModulation des Träägersgers FMCW LaserradarFMCW Laserradar
Frequenzmodulation der optischen Welle(O- FMCW)
periodisch wiederholenden linearen Frequenzchirp belegt. s t( ) so sin 2 π⋅ fo⋅ t⋅ π ψ⋅ t⋅ t⋅+( )⋅:=
0 0.5 11
0
11
1−
s n
10 t n
wobei: fo = Mittenfrequenz und ψ = Frequenzanstieg (Hub) geteilt durch Chirpdauer
Obere Hälfte der nachfolgenden Grafik zeigt:den Zeitverlauf der momentanen Frequenz fs(t) des Sendesignals s(t) und der Frequenz fe(t) des Empfangssignals e(t). Die Frequenz wird dabei wiederholt linear hochgefahren. Das Zwischenfrequenzsignal g(t) entsteht durch die Schwebung bei der Ueberlagerung von Sende- und Empfangssignal, g(t) hat in diesem Fall während des Chirps konstante Frequenz fzf(t).Untere Hälfte der nachfolgenden Grafik zeigt:den Zeitverlauf der momentanen Frequenz fzf(t) des Zwischenfrequenzsignals g(t).
EmpfangssignalFrequenz desSendesignal
Zwischen-frequenzsignalhat konstante Frequenz
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
OO-- FMCWFMCW--DistanzmessersDistanzmessersDistanzmess-Prinzip:Das vom Zielobjekt reflektierte Empfangssignal e(t) ist um die Signallaufzeit verzögert, beim simultanen Vergleich mit dem Sendesignal s(t) entsteht dabei ein Dopplereffekt. Dieser äussert sich als Zwischenfrequenz, denn das momentan emittierte Signal hat im Vergleich zum Empfangssignal, welches vor einer Laufzeit (to) ausgesandt wurde, eine höhere Frequenz. Die Zwischenfrequenz ist ein Grobschätzer für die Distanz.Auch gibt es einen Feinschätzer für die Distanz, welcher theoretisch die hohe Genauigkeit eines Phasenmessers erzeugt.
Das Zwischenfrequenzsignal wird beispielsweise mittels eines sogenannten Homodyne-Mischers gewonnen. Dieser multipliziert das Sendesignal mit dem Empfangssignal und am Ausgang entsteht das Zwischenfrequenzsignal g(t) = s(t) * e(t)
g t( )so2
cos 2 π⋅ ψ⋅ to⋅ t⋅ 2 π⋅ foψ to⋅
2−⎛⎜
⎝⎞⎠
⋅ to⋅+⎡⎢⎣
⎤⎥⎦
⋅:=
wobei to die gesuchte Signallaufzeit bedeutet.Neben dem Homodyne-Prinzip ist auch das Heterodyne-Prinzip möglich. Auf dieses Empfänger-Prinzip wird an dieser Stelle nicht eingegangen (Wesentliches siehe Kapitel: "Phasenmesser").
Distanzberechnung:Die Zwischenfrequenz steckt im ersten Phasenterm des cos: -> fZF = -ψ *toAuch der zweite Phasenterm des cos wird ausgewertet: -> PhiZF = π to (ψ *to-2*fo)fZF und PhiZF sind Messgrössen und werden dem Zwischenfrequenzsignal entnommen.
Die erste Gleichung ergibt eine Grobschätzung der Laufzeit: -> to = -fZF / ψDie zweite Gleichung liefert das endgültige Resultat für die Laufzeit.
to feinfoψ
foψ
foψ⋅
Phi ZF 2 π⋅ k⋅−
π ψ⋅+−:=
Die ganzzahlige Grösse k ist so zu wählen, dass tofein möglichst nahe beim Grobschätzwert to zu liegen kommt.Mit der Phasenmessung von PhiZF sollte theoretisch die Genauigkeit eines klassischen Phasenmessers erreichbar sein. Genauigkeitsbegrenzend sind vorallem Nichtlinearitäten der chirp-artigen Frequenzmodulation.
In der Praxis werden Frequenz- und Phasenmessung nicht direkt gemessen sondern mittels der Fouriertransformierten des Mischersignals g(t) algorithmisch berechnet. Es braucht daher weder eine Frequenzmessvorrichtung noch eine klassische Phasenmessvorrichtung.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
5. 5. Funktionsprinzip des Funktionsprinzip des FMCWFMCW--DistanzmessersDistanzmessers
5.3 Prinzipschema
Signal Generator Transmitter
Homodyne Detection ReceiverEstimator
Target
freq(t)
t
f0f0-Chirp/2
f0+Chirp/2
f(t)
t
f0f0-Bc /2
f0+Bc /2
τ
∆ffzf=sin(2π∆ft)
Blockschema FMCW:
Beispiel: Mittenfrequenz fo = 250MHzFrequenzhub Bc = 50MHzMesszeit Tc = 5msecLaufzeit to => Distanz
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Neue EDM Technologie:Neue EDM Technologie: System System AnalyzerAnalyzerVomVom PhasenmesserPhasenmesser --> zum System > zum System AnalyzerAnalyzerMessprinzip:
1. Keine niedrige Frequenzen, sondern nur hohe Frequenzen im 100MHz-Bereich, damit umfasst jede Teilmessung Distanzinformationen mit sub-mm Auflösung.
2. Aussenden ultrakurzer Laserpulse mit < 1nsec Pulsbreite im ≥ 100MHz-Takt. Dadurch werden ebenfalls höherharmonische Signalanteile mit Frequenzen bis gegen 1000MHz simultan ausgesendet.
3. Empfangen der reflektierten Laserpulssignale mit Frequenzanteilen bis gegen 500MHz.
4. Die Anzahl der vermessenen Laserpulsfrequenzen wird nach der Stärke des Empfangssignals gesteuert. Bei starkem Empfangssignal genügen bereits 5 Frequenzen. Bei schwachem Empfangssignal umfasst das Frequenzsampling mehr als 10 Laserpulsfrequenzen.
5. Nach abgeschlossener Messung wird ein impulsartiges Zeitsignal berechnet , welches die Laufzeit (Time-of-Flight) desSystems mit hoher Genauigkeit beinhaltet. Das Time-of-Flight-Signal wird aus den Analysedaten rekonstruiert. Hier ein Beispiel:
Insgesamt werden alle gemessenen Amplituden und Timedelays bei den k Modulationsfrequenzen in diese „Cost Function“ eingesetzt. Amplituden und Timedelays (Phasen) sind die Zwischenergebnisse aus den vorangegangenen Einzelmessungen (Systemanalyse), welche bei den k Modulationsfrequenzen inklusive deren Höherharmonischen bestimmt wurden.
Das Zeitsignal (Time-of-Flight-Signal) hat ein impulsartiges Aussehen ähnlich wie bei einem Laufzeitmesser.
Timesignal t( ) function Amplitude∑ Timedelay∑,⎛⎜⎝
⎞⎠
:=

13
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
VomVom PhasenmesserPhasenmesser --> zum System > zum System AnalyzerAnalyzer
An illustration of the „pulsed time-of-flight signal“ for the case of a single target:The calculated time-of-flight signal looks like the figure below.The targets are easily recognized at a distance of 150.000m or at a distance of 620m, respectively.
Target at 620.000m
0 50 100 150 200 250 300 350 400 450 500202468
10Reconstructed TOF-Signal
Distance [m]
St n
D n
Target at 150.000m
0 100 200 300 400 500 600 700202468
10Reconstructed TOF-Signal
Distance [m]
St n
D n
Einer von vielen Vorteilen:Kein zyklischerPhasenfehler.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
VomVom PhasenmesserPhasenmesser --> zum System > zum System AnalyzerAnalyzer
0 50 100 150 200 250 300 350 400 450 500202468
10Reconstructed time signal
Distance [m]
10
2−
Stn
5100 Dn
Modulation-Frequency Concept of the System Analyzer TPS1200-R300:It has more than one concept, the one for reflectorless is designed such that the time-of-flight signal is characterized by the properties shown in the figure below :
#1: Tight signal peak at the target distance and#2: No peaks within the gray shaded areas
1
22
Leistungssteigerung im Vergleich zu herkömmlichen Phasenmessern:Im Vergleich zum Phasenmesser sind mit diesem Prinzip 4..6 mal schwächere Empfangssignale noch korrekt auswertbar.
=> Auf weisse Zielobjekte beträgt die reflektorlose Reichweite 1000m.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Performance von Performance von EDMEDM--TechnologienTechnologien auf natauf natüürliche Oberflrliche Oberfläächenchen
Absolute EDM accuracy
RL-Distance
10 100 1000
high
Mekometer principle
Pulsed method withsingle-shot detection
Pulsed method with< 55MHz signal sampling
low
10000m
v.high
Phase meter
Coherent ranging, RIM andOptical FMCW
5mm
1mm
0.2mm
0.02mm
1 768
Land survey to stationary or movingtargets up to 4m/sec
RIM
atmospheric 1ppm limit(after meteo correction)
Incoh. FMCW and pulsed EDM HF-sampling
Pulsed time expansion System Analyzer
σD +-∆D/DAngabe der Messgenauigkeit:
RMS-Wert & Masstabsteilung
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Fehler Abweichungen SystematikenFehler Abweichungen Systematiken
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
PhaseninhomogenitPhaseninhomogenitäätt und Zyklischer Phasenabweichungenund Zyklischer Phasenabweichungen
Phaseninhomogenität:Die Phasenlage des modulierten Signals ist im Querschnitt des Lichtkegels nicht konstant. Dies wird verursacht durch Inhomogenitäten in der sendenden Lumineszenzdiode und der empfangenden Avalachediode. Damit ist die gemessene Strecke davon abhängig, mit welchem Teil der Lichtkeule die Messung erfolgt, d.h. wie genau das Reflexionsprisma angezielt wird. Der dadurch auftretende Fehler hat etwa die Größenordnung von 2 mm bis 20 mm.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
3. 3. Funktionsprinzip des LaufzeitmessersFunktionsprinzip des Laufzeitmessers
3.3 Räumlicher Laufzeitfehler am Beispiel eines Pulslasers
∆D = 60mm
Abhilfe: Homogenisierung der Laufzeitunterschiede mit optischen Lichtleiter:
Laufzeitunterschiede über die emittierende Fläche am Laserchip
Laufzeitunterschiede am Austrittsende eines Lichteiters-> Lichteiter wirkt als Homogenisierer der örtlichen Lauzeitunterschiede
∆D um min. 1 Grössenordnungkleiner

14
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
PhaseninhomogenitPhaseninhomogenitäätenten
APD-Diode als Empfängersensor EDM
Streuscheibe als Lichthomogenisierer über die sensitive Fläche
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Zyklische PhasenabweichungenZyklische Phasenabweichungen
Bei der Phasenmessung kann es zu einem optischen und/oder einem elektrischen "Übersprechen" zwischen Sende- und Empfangssignal im Instrument kommen. Dies verursacht eine fehler-hafte Phasenmessung, so dass das Ergebnis verfälscht wird. Die Auswirkung zeigt sich in einem von der Feinmessfrequenz (meist 10 MHz = 10 m) abhängigen, in diesem Zyklus auftretende Abweichung. Die Größenordnung liegt bei modernen Instrumenten etwa bei 1 mm bis 5 mm.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
ModulationsfrequenzModulationsfrequenz
Die Modulationsfrequenz zur Erzeugung des Maßstabs λ wird von einen Quarz -Oszillator erzeugt.
Die Frequenz ist abhängig von der Temperatur und der Alterung des Quarzes. In normalen elektrooptischen Distanzmessern liegt die Genauigkeit der Frequenz bei etwa 1·10-5, womit auch die Genauigkeit der Streckenmessung charakterisiert ist.
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Frequenzmesseinrichtung im Messlabor des IGPFrequenzmesseinrichtung im Messlabor des IGP
Massstab wir durch Modulationsfrequenz vorgegeben
1 Prüfling
2 Empfangsdiode
3 Elektronik
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
Additionskonstante bei EDMAdditionskonstante bei EDM
ETH ZürichGeodätische Messtechnik - Prof. Dr. H. Ingensand
EndeEnde






![01 Introduction.ppt [Kompatibilitätsmodus]webarchiv.ethz.ch/geometh-data/student/eg1/2009/01_Introduction.pdf · surveying (Geometerpatent) Engineering Geodesy - Prof. Dr. H. Ingensand](https://static.fdocuments.in/doc/165x107/605cac50efff0a77ec63c26b/01-kompatibilittsmoduswebarchivethzchgeometh-datastudenteg1200901introductionpdf.jpg)






![351 351 351 351 - MANA RESULTS · SURVEYING -11 Time : 3 hours ] PART ... Write a short note on Distomat. ... tions were made from two instrument stations P and R at a horizontal](https://static.fdocuments.in/doc/165x107/5b3708357f8b9a310e8bbc65/351-351-351-351-mana-results-surveying-11-time-3-hours-part-write.jpg)



