GEAR FORCES Spur Gears - WordPress.com · Example: The gear train shown in the figure is composed...
21
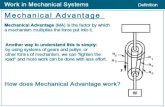
GEAR FORCES Spur Gears Gears are used to transmit force and motion from one shaft to the other. Circular gears are represented by circular blanks, called “ pitch circles. Pitch circles are tangent to each other at the “pitch point”. The kinematic requirement is that distance between the axes of the mating gears should be constant, because shafts carrying the gears are connected to the fixed link by bearings. addendum circle addendum dedendum dedendum circle clerance tooth thickness space width Circular pitch top land face width face flank bottom land pitch circle Base circle In theory, one blank transmit force and motion via the friction force occurring at the pitch point. There must be no slip between the two blanks at the pitch points. Blanks roll but do not slip with respect to each other. Input /output relationship for circular gear is linear. So:
Transcript of GEAR FORCES Spur Gears - WordPress.com · Example: The gear train shown in the figure is composed...

GEAR FORCES
Spur Gears Gears are used to transmit force and motion from one shaft to the other. Circular gears are
represented by circular blanks, called “ pitch circles. Pitch circles are tangent to each other at
the “pitch point”. The kinematic requirement is that distance between the axes of the mating
gears should be constant, because shafts carrying the gears are connected to the fixed link by
bearings.
addendum circle
addendum
dedendum
dedendum circle
clerance
tooth thickness
space width
Circular pitch
top land
face width
face
flank
bottom land
pitch circle
Base circle
In theory, one blank transmit force and motion via the friction force occurring at the pitch
point. There must be no slip between the two blanks at the pitch points. Blanks roll but do not
slip with respect to each other. Input /output relationship for circular gear is linear. So:

1
2
3
r2r3
VI23
I23 I13I12
Pitch point
Pitch Circle
2
,
223 * rVI θ= and
3
,
323 * rVI θ=
Then
,
3
2
3,
23
,
32
,
2 ** θθθθr
rrr =⇒=
Magnitudes of friction forces are generally small. So, if we want to transmit larger amounts of
forces, friction becomes inadequate and slip occurs. To prevent slip, we make the joint
between links 2 and 3 “form closed”. This is obtained by putting teeth around the periphery of
the gear blanks. For fitting these details, we need some space. We simply separate the gear
blanks apart a bit. This separation causes the transmitted force to at an angle called “pressure
angle”, denoted by φ . Pressure angle is standardized;
In imperial system o20=φ
In international system o5.18=φ
.
2θ
.
3θ
1
2
3
r2r3I13
Pitch Circle
φ
FG

Gear forces GFv
can be separated into two components tF , tangential force in tangent
direction and rF , radial force in the direction of radius.
For kinematic considerations the relative size of the teeth with respect to the blank is
important. Characteristic dimension for the blank is either the diameter or circumference of
the pitch circle. Characteristic dimension for the tooth is either the number of teeth on the
blank or the length of the portion of the pitch circle within the tooth body.
diametercirclePitch
teethPpitchDiametral d
#=
teeth
diametercircularPitchPpitchCircular c
#
*π= and
d
cP
Pπ
=
These two are used to Imperial System.
In European, International, German and Turkish standards:
)(#
mmteeth
diametercirclePitchModule =
Module and Diametral pitch number are standardized.
1
2
3
r2r3I13
Pitch CircleFG
Fr
Fr
FG
Ft
Ft

Helical Gears
To improve the force carrying capacity of the gears the teeth are cut in a helix. This increase
the tooth thickness, so helical gears are stronger. Also they operate with less noise. Force
acting normal to the tooth surface, hence it makes an angle of ψ (helix angle) with the gear
axis of rotation and φ with the common tangent.
Fa
Ft
Fr
FG
Ft
Fa
gear axis of rotation
ψ

The following relations are evident from figure:
traG FFFFvvvv
++=
ψtanFF ta =
φtanFF tr =
Bevel gears
Bevel gears are conical in shape and used to couple the shafts not parallel but intersecting.
Point of intersection of shafts is called the apex. Gear force acts as distributed over the whole
tooth thickness, but we can assume a resultant single force acting on the mid point of the tooth
thickness.
FaFt
Fr
FG
ψ
φ
γ
Γ
resultant forceacts at the midpoint of the gearthikchness

Example: The gear train shown in the figure is
composed of 6 diametral pitch spur gears and 20
degrees pressure angle. Link 2 is the driving
gear, delivering 25 Hp at a CCW speed of 900
rpm. Gear 3 is an idler and gear 4 carries the
external load. Draw freebody diagrams of the
gears, show all the forces acting and calculate
their magnitudes.
Solution:
Given: o20=φ
6=pitchDiametral
HpPower 25=
2
4
18 T
20 T
3
36 T
F2t
F2r
F'3rF'3t
F3t
F3rF4r
F4t
F2x
F2y
τ2
F3x
F3yF4y
F4x
τ4
xy
From second gear freebody diagram:
∑ =⇒=−= txtxx FFFFF 2222 0;0 (1)
∑ =⇒=−= ryyry FFFFF 2222 0;0 (2)
2
3
4
18 T
36 T
20 T

∑ =⇒=−= 2222222 *0*;0 rFrFM tt ττ (3)
From third gear freebody diagram:
∑ +=⇒=++−= trxtrxx FFFFFFF 233233 0;0 (4)
∑ +=⇒=−−= trytryy FFFFFFF 423423 0;0 (5)
∑ −=⇒=+−=232333323333 **0**;0 rFrFrFrFM tttt ττ (6)
From fourth gear freebody diagram:
∑ =⇒=−= txtxx FFFFF 4444 0;0 (7)
∑ =⇒=+−= rytry FFFFF 4444 0;0 (8)
∑ =⇒=+−= 24424444 *0*;0 rFrFM tt ττ (9)
Radius of the gears can be calculated following formulas:
d
dP
teethddiametercirclePitch
diametercirclePitch
teethPpitchDiametral
##2 =⇒=
"5,16*2
18
*2
##2
2
22 ==⇒=⇒= rP
teethr
P
teethd
d
"36*2
36
*2
#3
3
3 ==⇒=⇒ rP
teethr
"67,16*2
20
*2
#4
4
4 ==⇒=⇒ rP
teethr
Gear forces of the second gear become:
lbrn
PowerF t 14,1167
5,1*900**2
12*25*33000
***2
12**33000
22
2 ===ππ
lbFFF rtr 8,42420tan*14,1167tan* 222 ==⇒= φ
Speed of the fourth gear is:
rpmnTT
TTn 810900*
36*20
18*36*
*
*2
42
234 ===
Then, gear forces of the fourth gear become:
lbrn
PowerF t 3,1168
67,1*810**2
12*25*33000
***2
12**33000
44
4 ===ππ
lbFFF rtr 22,42520tan*3,1168tan* 444 ==⇒= φ

Using the equations (1,2,3,4,5,6,7,8,9) unknowns become:
lbF x 14,11672 =
lbF y 8,4242 =
inlb.7,17502 =τ
lbF x 23,15013 =
lbF y 18,13703 =
inlb.03 =τ
lbF x 22,4254 =
lbF y 3,11684 =
inlb.97,19464 =τ

Example: Consider the gear train
composed of spur gears. Shaft 2 is the input
of the train, and it delivers 6 hp at a speed
of 600 rpm CCW when viewed from
bottom. Calculate the bearing forces at C
and D. Pressure angle is o20=φ .
Solution:
Given: o20=φ
6=pitchDiametral
HpPower 25=
rpmn 6002 =
Top view of the assembly is given below.
Freebody diagram of the gears are given below.
Radius of the gears can be calculated from the definition of diametral pitch;
d
dP
teethddiametercirclePitch
diametercirclePitch
teethPpitchDiametral
##=⇒=
"5,012*2
12
*2
##2
2
22 ==⇒=⇒= rP
teethr
P
teethd
d
"5,112*2
36
*2
#3
3
3 ==⇒=⇒ rP
teethr
Gear forces become:
D
C A
B
12 T12 P, 36 T1"
1"
Y
X
2
z
x
y
F3r
F3t
FCx
FCz
D
FDx
FDz
τ3
z
x
z
F2r
F2t
FAx
FAz
A
BFBx
FBz

lbrn
PowerF t 5,1260
5,0*600**2
12*6*33000
***2
12**33000
22
2 ===ππ
lbFFF rtr 79,45820tan*5,1260tan* 222 ==⇒= φ
lbFF tt 5,126023 ==
lbFF rr 79,45823 ==
CCWinlbrF t .70,18905,1*5,1260* 233 ===τ
The shaft 3 is in static equilibrium with the gear forces, bearing forces and the torques. All the
forces and all the moments acting should add up to zero. Forces and moments act in 3
dimensional space, so, overall calculations may be difficult. If a body is static, it is seen static
in all directions.
1260,5 lb
FCz FDz
y
z
C D 458,79 lbFCzFDz
y
x
C D
Using the y-z plane view,
∑ = 0yF (2)
∑ =+⇒=−+= lbFFFFFF DzCztDzCzz 5,12600;0 3
lbF
FFFM t
DzDztC 25,630"2
"1*0"2*"1*;0 3
3 ==⇒=+−=∑
lbFlbFF CzDzCz 25,63025,6305,12605,1260 =−=⇒=+
Using the x-y plane view,
∑ =+⇒=−+= lbFFFFFF DxCxrDxCxx 79,4580;0 3
∑ = 0yF (3)
lbF
FFFM rDxDxrC 395,229
"2
"1*0"2*"1*;0 3
3 ==⇒=−=∑
lbFlbFF CxDxCx 395,229395,22979,45879,458 =−=⇒=+
o
CzCxC lbFFF 707,67025,630395,229 2222 ∠=+=+=
o
CxDxD lbFFF 707,67025,630395,229 2222 ∠=+=+=

Example: Gear 2 is rotating CCW at 1000 rpm, actuated by a 5 Hp electric motor. The gears
are all of helical type with 20 degrees of pressure angle and 30 degrees of helical angle,
whose teeth numbers and pitch are shown in the figure. Calculate the gear forces and their
components and draw freebody diagram of each gear with all the force components, showing
the bearing forces and external loads.
3
40 T
4
15 T
2
20 T, 5 P
xy
x
z
Solution:
Given: o20=φ , o20=ψ
5=pitchDiametral , HpPower 5=
rpmn 10002 =
Gear forces come from power.
For second gear;
"25*2
20
*2
#22 ==⇒= r
P
teethr
lbrn
PowerF t 56,157
2*1000**2
12*5*33000
***2
12**33000
22
2 ===ππ
lbFFF rtr 35,5720tan*56,157tan* 222 ==⇒= φ
lbFFF rtr 97,9030tan*56,157tan* 222 ==⇒= ψ
For third gear;

rpmnT
Tn 5001000*
40
20* 2
3
2
3 ===
"45*2
40
*2
#33 ==⇒= r
P
teethr
lbrn
PowerF t 56,157
4*500**2
12*5*33000
***2
12**33000'
33
3 ===ππ
lbFFF rtr 35,5720tan*56,157'tan*'' 333 ==⇒= φ
lbFFF rtr 97,9030tan*56,157'tan*'' 333 ==⇒= ψ
x
y
z
F2t
F2r
F2a F3r=F2r
F3a=F2a
F3t=F2t F'3r
F'3a
F'3t
F'3t=F4t
F'3r=F4r
F'3a=F4a
From second gear freebody diagram:
∑ =⇒=−= rxrxx FFFFF 2222 0;0
∑ =⇒=−= tytyy FFFFF 2222 0;0
∑ =⇒=−= azazz FFFFF 2222 0;0
rF
rFM
tz
tzz
*
0*;0
22
2222
=⇒
=−=∑τ
τ
222
222
*
0*;0
rF
rFM
ay
ayy
=⇒
=−−=∑τ
τ
x
y
z
F2t
F2r
F2a
τy2
τz2
F2y
F2x
F2z
2

From the above equations second gear bearing forces and torques become:
lbFlbFlbF zyx 97,90,56,157,35,57 222 ===
zalonginlb
yalonginlb
z
y
+=
−=
.12,315
.94,181
2
2
τ
τ
From third gear freebody diagram:
x
y
z
F3r=F2r
F3a=F2a
F3t=F2t
F'3r
F'3a
F'3t
τy3
τz3
F3y
F3x
F3z
3
∑ −=⇒=+−−= rrxrrxx FFFFFFF 233233 '0';0
ttytyty FFFFFFF 333333 '0';0 +=⇒=+−=∑
∑ +=⇒=++−= aazaazz FFFFFFF 233233 0;0
3332333323 *'*0*'*;0 rFrFrFrFM ttzttzz −=⇒=+−=∑ ττ
3332333323 *'*0*'*;0 rFrFrFrFM aayaayy +−=⇒=−+=∑ ττ
From the above equations and third gear bearing forces and torques become:
lbFlbFlbF zyx 94,181,12,315,0 333 ===
0
0
3
3
=
=
z
y
τ
τ
From fourth gear freebody diagram:

∑ =⇒=+−= rxrxx FFFFF 3434 '0';0
∑ =⇒=−= tytyy FFFFF 3434 '0';0
∑ =⇒=−= azazz FFFFF 3434 '0';0
434
434
*'
0*';0
rF
rFM
tz
tzz
=⇒
=+−=∑τ
τ
434
434
*'
0*';0
rF
rFM
ay
ayy
=⇒
=−=∑τ
τ
From the above equations fourth gear bearing forces and torques become:
lbFlbFlbF zyx 97,90,56,157,35,57 444 ===
zalonginlb
yalonginlb
z
y
−=
+=
.34,236
.45,136
4
4
τ
τ
y
z
F'3t=F4t
F'3r=F4r
F'3a=F4a
τy4
τz4
F4y
F4x
F4z
4
x

Example: In the figure a simple gear train is
shown, composed of two 10 pitch straight
bevel gears, larger gear having 50 and
smaller 20 teeth, placed to couple two
intersecting shafts at right angles to each
other. Gear 1, rotating CW when viewed
from left is driving gear 2 by delivering it 5
HP at 1000 rpm. The blank thickness of the
smaller gear is 1 inch. Calculate the forces
that bearings at A and B carry, if all the
axial force is carried by the bearing at A.
Pressure angle is o20=φ .
Solution:
Given: o20=φ
10=pitchDiametral
HpPower 5=
rpmn 10001 =
Half cone angle of the first gear;
'2.681
5.2tan 01 ==Γ −
"5,210*2
50
*2
#1
1
1 ==⇒= rP
teethr
"110*2
20
*2
#2
2
2 ==⇒= rP
teethr
"25,05,2"5.011 =−=−= rrav
Forces on the first bevel gear
lbrn
PowerF t 56,157
0,2*1000**2
12*5*33000
***2
12**33000
11
1 ===ππ
lbFFF rtr 25,532,68sin*20tan*56,157sin*tan* 111 ==⇒Γ= φ
lbFFF rtr 256,212,68cos*20tan*56,157cos*tan* 111 ==⇒Γ= φ
1
2
4"
1"
11
1000 rpm
0.5"
Γ

Freebody diagram of the gears are given below.
Fa1
Ft1
Fr1
x
y
z
Ft2=Ft1Fa2=Fr1
Fr2=Fa1
A
BFBx
FBz
FAz
FAx
FAy
τ2
Using the plane views of the second gear,
53,25 lb21,257 lb
FAx
FAy
FBx
4"
1,5"
x
y+
157,54 lb21,257 lb
FAz
FAy
FBz
4"
1,5"
z
y+
∑ =−+= 025,53;0 AzBzz FFF ∑ =−+−= 054,157;0 BzAzz FFF
0257,21;0 =−=∑ Ayy FF 0257,21;0 =−=∑ Ayy FF
∑ =−+= 05,5*25,538,0*257,21"4*;0 AxB FM ∑ =−= 05,5*56,157"4*;0 AzB FM

lbFAz 913,68−= lbFAz 645,216=
lbFAy 257,21= lbFBz 085,59−=
lbFBz 66,15=
lbkjiFA
rrrr645,216257,21913,68 ++−=
lbkiFA
rrr085,5966,15 −=

Example: Gear 2 is rotating CCW at 1000 rpm,
actuated by a 20 HP electric motor. It is delivering
half of its power to gear 3 and other half to gear 4,
whose teeth numbers and pitches are as shown in
the figure. The gears are all of spur type with 20
degrees of pressure angle. Calculate the gear
forces and their components, determine their
directions and draw free body diagram of each
gear with all the force components, showing the
bearing forces and external loads. Assume that the
gears thickness is negligible.
Solution:
Given: o20=φ , 5=pitchDiametral ,
HpPower 20=
3
4
20 T
30 T
2
40 T
F23t
F23r
F32r
F32t
F42rF24r
F24t
F3x
F3y
τ3
F2x
F2yF4y
F4x
τ4
xy
F42t
τ2
25 Tr r'
"*
rP*
teeth#r 4
52
40
2==⇒=
".*
'rP*
teeth#'r 52
52
25
2==⇒=
"*
rP*
teeth#r 2
52
20
233 ==⇒=
"*
rP*
teeth#r 3
52
30
244 ==⇒=
Gear forces of the second gear become:
3
2
4
20 T, 5 P
40T
25 T30 T, 5 P

lb.***
**
r*n**
*/Power*F t 56157
410002
121033000
2
12233000
2
32 ===ππ
lb.tan*.Ftan*FF rtr 35572056157323232 ==⇒= φ
lb..***
**
'r*n**
*/Power*F t 10252
5210002
121033000
2
12233000
2
42 ===ππ
lb.tan*.Ftan*FF rtr 76912010252424242 ==⇒= φ
From the third gear freebody diagram:
lb.FF tt 651573223 ==
lb.FF rr 35573223 ==
∑ ==⇒=+= lb.FFFF;F txtxx 6515700 233233 (1)
∑ ==⇒=−= lb.FFFF;F ryyry 355700 233233 (2)
∑ ===⇒=−= in.lb.*.r*Fr*F;M tt 1231525615700 323332333 ττ CCW (3)
From second gear freebody diagram:
lb.FFFFFF;F rtxrtxx 3224900 4232242322 =+=⇒=++−=∑ (4)
∑ −=+−=⇒=+−= lb.FFFFFF;F trytryy 7519400 4232242322 (5)
∑ =+=⇒=−−= in.lb.'r*Fr*F'r*Fr*F;M tttt 49126000 42323423222 ττ CCW (6)
From fourth gear freebody diagram:
lb.FF tt 102524224 ==
lb.FF rr 3557322 ==
∑ ==⇒=−= lb.FFFF;F rxrxx 769100 244244 (7)
lb.FFFF;F tytyy 1025200 44244 ==⇒=−=∑ (8)
∑ ==⇒=−= in.lb.r*Fr*F;M tt 375600 424442444 ττ CCW (9)

Example: Gear 3 is rotating CCW at 1000 rpm, actuated
by a 20 HP electric motor. The gears are all of spur type
with 20 degrees of pressure angle. Calculate the gear
forces and their components, determine their directions
and draw free body diagram of each gear with all the
force components, showing the bearing forces and
external loads. Assume that the gears thickness is
negligible.
Given: o20=φ , 5=pitchDiametral , HpPower 20=
3
4
20 T
30 T
2
40 T
F23t
F23r
F32r
F32t
F42rF24r
F24t
F3x
F3y
τ3
F2x
F2yF4y
F4x
τ4
xy
F42t
τ2
25 Tr r'
"*
rP*
teeth#r 4
52
40
2==⇒=
".*
'rP*
teeth#'r 52
52
25
2==⇒=
"*
rP*
teeth#r 2
52
20
233 ==⇒=
"*
rP*
teeth#r 3
52
30
244 ==⇒=
Gear forces of the second gear become:
lb.***
**
r*n**
*Power*F t 25630
210002
122033000
2
1233000
33
23 ===ππ
3
2
4
20 T, 5 P
40T
25 T30 T, 5 P

lb.tan*.Ftan*FF rtr 42292025630323232 ==⇒= φ
lb..***
**
'r*n**
*Power*F t 41008
525002
122033000
2
1233000
2
42 ===ππ
lbtan*.Ftan*FF rtr 3672041008424242 ==⇒= φ
From the third gear freebody diagram:
lb.FF tt 256303223 ==
lb.FF rr 42293223 ==
∑ ==⇒=−= lb.FFFF;F txtxx 2563000 233233 (1)
∑ ==⇒=−= lb.FFFF;F ryyry 422900 233323
(2)
∑ ===⇒=−= in.lb.*.r*Fr*F;M tt 5126022563000 323332333 ττ CCW (3)
From second gear freebody diagram:
lb.FFFFFF;F rtxrtxx 2599700 4232242322 =+=⇒=++−=∑ (4)
∑ =+=⇒=−−= lb.FFFFFF;F trytryy 8123700 4232242322 (5)
∑ =−=⇒=+−= in.lb'r*Fr*F'r*Fr*F;M tttt 000 42323423222 ττ (6)
From fourth gear freebody diagram:
lb.FF tt 410084224 ==
lbFF rr 3674224 ==
∑ ==⇒=−= lbFFFF;F rxrxx 36700 244244 (7)
lb.FFFF;F tytyy 4100800 44244 −=−=⇒=+=∑ (8)
∑ =−=⇒=+= in.lb.r*Fr*F;M tt 2302500 424442444 ττ CW (9)