FROM VENUS, EARTH, AND MARS - … · FROM VENUS, EARTH, AND MARS Anastassios E. Petropoulos* James...
11
Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc. A98-37361 AIAA-98-4284 TRAJECTORIES TO JUPITER VIA GRAVITY ASSISTS FROM VENUS, EARTH, AND MARS Anastassios E. Petropoulos* James M. LonguskiJ and Eugene P. Bonfiglio* School of Aeronautics and Astronautics, Purdue University, West Lafayette, Indiana 47907-1282 Abstract Gravity-assist trajectories to Jupiter, launching between 1999 and 2031, are identified using patched- conic techniques. The classical trajectories, such as the Venus-Earth-Earth gravity assist (VEEGA), and many less conventional paths, such as Venus-Mars-Venus-Earth, are examined. Flight times of up to about seven years are considered. The AV-optimized results confirm that VEEGAs are the most effective gravity-assist trajectory type. If the Earth is excluded as a flyby body, Venus-Venus-Venus gravity assists are typically the best option, although at times non-conventional paths are better. These non-conventional paths can occasionally decrease the time of flight significantly, at very minor AV cost, when compared to the classical types. Introduction Since Galileo Galilei pointed his tiny telescope at Jupiter and discovered its four moons in 1610, our largest planet has fascinated astronomers and laymen alike. Four flyby spacecraft (Pioneers 10 and 11, and Voyagers 1 and 2) have reconnoitered this miniature solar system; and now, at the time of this writing, the Galileo spacecraft is orbiting the planet and per- forming detailed surveys of its atmosphere, satellites and magnetosphere. There have been many wonder- ful discoveries, and as the Galileo project completes its extended mission, the Jovian system beckons for further exploration. The mounting evidence of liquid water below the icy surface of Europa offers the tan- talizing possibility of life — spurring NASA to plan a Europa orbital mission to examine this satellite more closely in the next decade. With these plans for a sixth mission on the draw- ing board, it seems highly likely that scientific interest in Jupiter will continue to increase. At the same time, budget constraints and the NASA mandate of "bet- ter, cheaper, faster" demand that creative solutions be found, if we are to maintain a vigorous program of exploration of Jupiter. The most potent way of reducing launch costs (which are among the most expensive) is to use the 'Doctoral Candidate, Member AIAA. 'Professor, Associate Fellow AIAA, Member AAS. * Graduate Student. Copyright (C) 1998 by Anastassios E. Petropoulos, James M. Longuski and Eugene P. Bonfiglio. Published by the Amer- ican Institute of Aeronautics and Astronautics, Inc. with permission. proven technique of gravity assist. Voyager 2 used gravity assists from Jupiter, Saturn, and Uranus, to eventually reach Neptune in 12 years; Galileo used a VEEGA (Venus Earth Earth Gravity Assist) to reach Jupiter in just over 6 years. Unfortunately, gravity-assist trajectories usually require long flight times, which can drive up mission operations costs. However, with the development of more autonomous spacecraft and more efficient operations procedures, these costs are expected to decrease steadily. Until other means of space transportation become readily available (electric propulsion, solar sails, aerogravity assist, or warp drive!), the gravity assist option will, in spite of the flight time issue, remain the most at- tractive alternative. (And even as other propulsive technologies emerge, they will gain considerable aug- mentation when coupled with gravity assist.) The principle of gravity assist has been under- stood since the 19 th century when Leverrier (see Broucke 1 ) and Tisserand (see Battin 2 ) explained large perturbations of the orbits of comets by the planet Jupiter. In the late 1950s, Battin 3 consid- ered the use of the gravitational attraction of a planet to place a spacecraft on the return leg of its round- trip interplanetary journey. The former Soviet Union used lunar gravitational attraction to obtain desirable return trajectories. 4 Many investigators in the early 1960s explored the enormous potential of the grav- itational swingby maneuver, including Deerwester, 5 Flandro, 6 Gillespie et al.J Hollister, 8 Minovitch, 9 Niehoff, 10 Ross, 11 Sohn, 12 and Sturms and Cutting. 13 Stancati et a/. 14 demonstrate that VEGA (Venus Earth Gravity Assist) and AV-EGA (Delta-V Earth 116
Transcript of FROM VENUS, EARTH, AND MARS - … · FROM VENUS, EARTH, AND MARS Anastassios E. Petropoulos* James...

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
A98-37361 AIAA-98-4284
TRAJECTORIES TO JUPITER VIA GRAVITY ASSISTSFROM VENUS, EARTH, AND MARS
Anastassios E. Petropoulos* James M. LonguskiJ and Eugene P. Bonfiglio*School of Aeronautics and Astronautics, Purdue University,
West Lafayette, Indiana 47907-1282
AbstractGravity-assist trajectories to Jupiter, launching between 1999 and 2031, are identified using patched-
conic techniques. The classical trajectories, such as the Venus-Earth-Earth gravity assist (VEEGA),and many less conventional paths, such as Venus-Mars-Venus-Earth, are examined. Flight times of upto about seven years are considered. The AV-optimized results confirm that VEEGAs are the mosteffective gravity-assist trajectory type. If the Earth is excluded as a flyby body, Venus-Venus-Venusgravity assists are typically the best option, although at times non-conventional paths are better. Thesenon-conventional paths can occasionally decrease the time of flight significantly, at very minor AV cost,when compared to the classical types.
Introduction
Since Galileo Galilei pointed his tiny telescope atJupiter and discovered its four moons in 1610, ourlargest planet has fascinated astronomers and laymenalike. Four flyby spacecraft (Pioneers 10 and 11, andVoyagers 1 and 2) have reconnoitered this miniaturesolar system; and now, at the time of this writing,the Galileo spacecraft is orbiting the planet and per-forming detailed surveys of its atmosphere, satellitesand magnetosphere. There have been many wonder-ful discoveries, and as the Galileo project completesits extended mission, the Jovian system beckons forfurther exploration. The mounting evidence of liquidwater below the icy surface of Europa offers the tan-talizing possibility of life — spurring NASA to plan aEuropa orbital mission to examine this satellite moreclosely in the next decade.
With these plans for a sixth mission on the draw-ing board, it seems highly likely that scientific interestin Jupiter will continue to increase. At the same time,budget constraints and the NASA mandate of "bet-ter, cheaper, faster" demand that creative solutionsbe found, if we are to maintain a vigorous programof exploration of Jupiter.
The most potent way of reducing launch costs(which are among the most expensive) is to use the
'Doctoral Candidate, Member AIAA.'Professor, Associate Fellow AIAA, Member AAS.* Graduate Student.
Copyright (C) 1998 by Anastassios E. Petropoulos, James M.Longuski and Eugene P. Bonfiglio. Published by the Amer-ican Institute of Aeronautics and Astronautics, Inc. withpermission.
proven technique of gravity assist. Voyager 2 usedgravity assists from Jupiter, Saturn, and Uranus, toeventually reach Neptune in 12 years; Galileo useda VEEGA (Venus Earth Earth Gravity Assist) toreach Jupiter in just over 6 years. Unfortunately,gravity-assist trajectories usually require long flighttimes, which can drive up mission operations costs.However, with the development of more autonomousspacecraft and more efficient operations procedures,these costs are expected to decrease steadily. Untilother means of space transportation become readilyavailable (electric propulsion, solar sails, aerogravityassist, or warp drive!), the gravity assist option will,in spite of the flight time issue, remain the most at-tractive alternative. (And even as other propulsivetechnologies emerge, they will gain considerable aug-mentation when coupled with gravity assist.)
The principle of gravity assist has been under-stood since the 19th century when Leverrier (seeBroucke1) and Tisserand (see Battin2) explainedlarge perturbations of the orbits of comets by theplanet Jupiter. In the late 1950s, Battin3 consid-ered the use of the gravitational attraction of a planetto place a spacecraft on the return leg of its round-trip interplanetary journey. The former Soviet Unionused lunar gravitational attraction to obtain desirablereturn trajectories.4 Many investigators in the early1960s explored the enormous potential of the grav-itational swingby maneuver, including Deerwester,5Flandro,6 Gillespie et al.J Hollister,8 Minovitch,9
Niehoff,10 Ross,11 Sohn,12 and Sturms and Cutting.13
Stancati et a/.14 demonstrate that VEGA (VenusEarth Gravity Assist) and AV-EGA (Delta-V Earth
116

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
Gravity Assist) trajectories to the outer planets (in-cluding Jupiter) provide two to three times the netpayload capability of direct transfers. A definitivestudy of VEGA and VEEGA trajectories to Jupiter,Saturn, and selected comets for launches in the lastdecade of the twentieth century is presented by Diehland Myers.15 Ten mission designers spent severalmonths in the effort.
In order to speed up the search for gravity-assisttrajectotries, Williams16 developed automated designsoftware based on the JPL (Jet Propulsion Labora-tory) interactive program STOUR17 (Satellite TourDesign Program). The new version is capable of find-ing all patched-conic, gravity-assist trajectories for agiven set of launch dates and launch VcoS under agiven maximum TOF (time of flight). Patel added18
the capability of including AVs between gravity as-sists, and (with Longuski) demonstrated19 the pro-gram's ability to automatically find all of the VEGAand VEEGA trajectories discovered by Diehl and My-ers, plus a few more. Later, Staugler20 incorporatedan algorithm to automatically design VOQ-leveragingtrajectories (including AV-EGAs).
In this paper we use STOUR to identify gravity-assist trajectories via Venus, Earth, and Mars toJupiter during a three decade launch period from1999 to 2031. We are interested in low launch energytrajectories with low total AV and with reasonableTOFs (less than about 7 years). For selected caseswe find the AV-optimal solutions using the JPL soft-ware MIDAS21 (Mission Analysis and Design Soft-ware). Since we are considering up to four gravityassists with three of the inner planets, there are 120possible paths (or combinations). Although STOUR
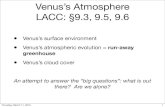
PA?H: 3 2 3 3 5 Vinf(km/s): 3.00 3.25 3.50 3.75Search 5vcE'. No.: 5 ALTMJN = -IQQC.lgr. Search Min. Alt.: 200.0 km
s sg s s g ; s o o o o o o o o o c o o o o o o a o o o o a o o
Launch DateL/D: 990101. TO 320101. by 5.0 daysTFMAX = 2300.0 Days
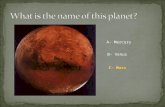
Fig. 1 Resonant and non-resonant, low launchenergy VEEGAs with arrival VQO < 8 km/s.
is a very powerful tool, it takes several days (on a SunUltraSPARC 1 workstation) to assess one path (e.g.VEEGA) for a three decade launch period. Thus it isimpractical to merely grind through all possible com-binations, and so — as is often the case — engineer-ing judgement and analysis are required. We find thesimple analytic techniques developed by Hollenbeck22
very helpful in predicting the potential performanceof combinations of Venus and Earth gravity assists.Further refinements of these techniques are given bySims;23 a detailed analysis of AV-EGA trajectoriesis presented by Sims et a/.24 We show that extend-ing this concept to include up to four gravity assistsgives deep insight into which paths are likely to beeffective and which ineffective. We call the problemof selection, pathfinding, and it is the central issue ofmultiple gravity-assist mission design.
Classical Trajectories
Certain highly effective trajectory types have beenwell known and commonly used in mission planning,thus meriting the name "classical." Specifically, inthis paper the classical trajectories will be taken asAV-EGA, VEGA, VEEGA, V2, and V3, where V"denotes n Venus gravity assists after Earth launch.
The AV-EGA is a Voo-leveraging trajectory inwhich a maneuver (AV) is performed near apoap-sis after Earth launch, such that the spacecraft re-encounters Earth with a higher Vco for the final grav-ity assist. (This describes the exterior AV-EGA forheliocentrically outbound spacecraft. The symmet-ric case, where the spacecraft is inbound, is termedinterior.)
In the case of VEGA, VEEGA, and Vn trajecto-ries to Jupiter, the disadvantage of launching into alower energy orbit in order to reach the first Venusis more than offset by the benefit of a high VOQ ata body that is almost as massive as the Earth. Infact, for typical launch VooS, the VQO at Venus is sohigh that a single flyby of the planet cannot turn theVoo enough to reach Jupiter. A second flyby of Venusis also insufficient, but can be adequately augmentedwith a maneuver during or after the flyby. A thirdVenus flyby can alleviate the need for the maneuver.The VEGAs and VEEGAs are more effective froman energy standpoint not only because the Earth canprovide slightly more V^ turning, but also becauseafter the Venus flyby we no longer need to maintaina perihelion distance as low as Venus's orbit. Voo-leveraging can often be effectively incorporated intopaths with repeated flybys of the same body.
A salient feature of the classical trajectories,which accounts for their common use, is the fact that
117
Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
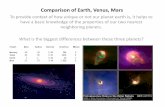
PATH: 3 2 0 2 0 2 0 5Search Even: No.: B ALTM1N =
Viafdan/s): 4.50Search Min. Alt.:
:|
c o o o o o o o o o o o o o o o o o c o a o c o o o c o o o o o
Launch DateL/D: 990101. TO 320101. by 5.0 daysTFMAX = 2SOO.O Days
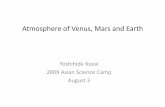
Fig. 2 V3 trajectories with two Vco-leveragingmaneuvers (combined AV < 1.25 km/s).
launch opportunities occur relatively frequently —at least every two to three years, typically. This isreadily seen from the launch-date plots produced us-ing STOUR. For example, Fig. 1 shows TOF versuslaunch-date for low launch energy VEEGAs. Eachnumeral on the plot represents a trajectory with acertain launch energy, as is explained more fully inTable 1. Such plots serve to identify families of tra-jectories, and are thus useful for observing trends.Specific trajectories can be chosen from a family byfocusing on a smaller date range to make the numer-als more discernible if necessary. Another example ofa launch-date plot is shown in Fig. 2 for V3 trajecto-ries with leveraging maneuvers between both Venuspairs. In this case each numeral on the plot representsa certain total deep-space AV.
While the classical trajectories are frequentlyavailable, non-classical trajectories must also be stud-ied, not only to fill the gaps in the launch-date space,but also to determine any instances where they aresuperior to the classical options.
Identification of Non-classical Paths
There are several approaches one might take in de-termining which non-classical paths may be effective.The first approach we employed was to seek varia-tions on the classical paths. One such variation usesa gravity assist at another planet to achieve a VOQ-leveraging effect. This technique is used, for example,by Sims et a/.24 Thus, we use such paths as VMV2
and VEME where Mars is the leveraging body. An-other type of variation on classical paths is the simpleaddition of another gravity-assist body while outward
Table 1 Legend for launch-date plotsPATH Planets encountered, including launch
and destination bodies, e.g. PATH: 3 23 3 5 is a VEEGA from Earth to Jupiter.
________Maneuvers represented by 0.________Vinf Launch VooS. Without maneuvers
present, the numerals 0 ,2,3 ,4 , . . . onthe plot represent the Ist, 1nd, 3rd, 4th,...VooS in the list. (0 is used, rather than 1,for better discrimination.) E.g. in Fig. 1the numeral 3 on the plot denotes a Vooof 3.50 km/s. With maneuvers, only onelaunch Voo is shown, as in Fig. 2, where ao represents a AV between 0 and 1 km/s,
________a 2 represents 1 to 2 km/s, etc.______Search Event in PATH for which data are plot-Event ted. E.g. in Fig. 2, TOF to JupiterNo. is plotted since encounter with Jupiter is
________the 8tfe event in the PATH._________ALTMIN Minimum fiyby altitude permitted in the
________STOUR run._________________Search Trajectories with flyby altitudes belowMin. Alt. this value are not included in the plot.L/D Launch-date range (YYMMDD) used in
the STOUR run. E.g. 990101 means 1Jan. 1999. The launch-date increment is
_________also given, for example "by 5 days."____TFMAX Maximum allowable time of flight in the
STOUR run.
bound for Jupiter. Examples include VEM and V2E.There is also the obvious insertion of a Mars flyby ona direct Earth-to-Jupiter trajectory. These variationsmay be used in combination, to yield such paths asVMVE. Another variation is the repetition of a clas-sical type, as in VEVE. A more radical variation isthe substitution of Mars for Venus, giving such pathsas ME, ME2, and M2.
The natural concern in devising these paths is thefrequency of launch opportunities. STOUR has beenour workhorse in addressing this concern; we also dis-cuss some specific cases in a later section. However,it should be noted that intuition regarding the fre-quency may be misleading — for example, there is noobvious reason why VMV2 occurs far less frequentlythan VEME, yet this is what the STOUR results in-dicate.
Another approach to pathfinding is to simply listall possible combinations and judiciously rank thelist. The restrictions on the paths considered (Venus,Earth, and Mars flybys with a limit of 4 fiybys) leavesa complete list of 120 unique paths. Cutting the120 paths down to a useable number requires intu-ition and experience. To aid our intuition, we created
118

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
no1
4 5 6Earth launch V^ (km/s)
a)
3
/ XJUPITER / X_
4 5 6Earth launch V^ (km/s)
b)
10'
JUPITER /~
4 5 6Earth launch V (km/s)
c)
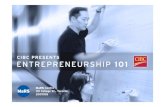
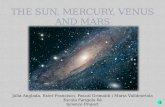
Fig. 3 Gravity Assist Potential plots.
Gravity Assist Potential (GAP) plots for each path.For these plots we assume that the trajectories areballistic (i.e. there are no deep-space maneuvers),the launch from Earth is always tangential, the plan-etary orbits are circular, and there is no overturn-ing. (The Vco vector is turned as much as possiblewithout turning past alignment with the velocity vec-tor of the flyby planet.) For multiple flybys, such as
VM2V, the VQO vector is turned in a positive senseat the first Venus (toward alignment with Venus'svelocity vector) because the next planet in the pathis "outward" (i.e. more distant from the Sun). Atthe second planet, Mars, the VTO vector is turned ina negative sense (against alignment with Mars' ve-locity vector) because the next planet is the same(Mars) and the planet after that (the last Venus) is"inward." In other words, if the next different planetis inward, the V^ vector is turned negatively, if itis outward, the VQO vector is turned positively. Ofcourse, at the last planet in every path the VCQ vec-tor is turned in a positive sense to maximize the finalaphelion radius. Flyby altitudes as low as 200 kmare permitted. The GAP plots associated with someof the paths considered for this paper can be seenin Fig. 3. (For comparison, the minimum V^ fora direct launch to Jupiter is 8.79 km/s.) It shouldbe mentioned that when the GAP plots reach theirpeak aphelion, it is better to use any extra AV as amaneuver, rather than for launch VQO . We also notethat since these GAP plots only apply to ballistic tra-jectories, they cannot be used to analyze AV-EGAtrajectories. (A detailed analysis of the AV-EGA isprovided by Sims23 and Sims et a/.24) Another pointto make about these plots is that we assume the plan-ets will always be in the right place at the right time(i.e. phasing issues are ignored). The GAP plots onlyindicate feasibility from an energy standpoint.
In Fig. 3, the GAP plots show some interest-ing characteristics for certain trajectory paths. (Thepaths in this figure are represented numerically; aVEE is denoted by 233.) The V2 path (22 in Fig.3a) and VM path (24 in Fig. 3a) show that, usingthese paths alone, it is impossible to get to Jupiter.It is generally true that the V2 needs some AV toget to Jupiter. In the VM case, STOUR confirmsthat there are no opportunities with flyby altitudesof 200 km or greater. The VEEGA, well known forits effectiveness, climbs through the Jupiter line be-fore a Voo of 3 km/s is reached. A somewhat sur-prising result is that the V2E reaches Jupiter witha launch V^ of 3.5 km/s (Fig. 3b). STOUR con-firms that this path in fact exists and that it occursquite often with launch VooS greater than or equal to4 km/s. Finally, the V2E2 (Fig. 3b) and the VE2M(Fig. 3c) paths show great potential, both reachingJupiter with a launch V^ of less than 3 km/s. Asmight be expected from the V2E discussion, STOURshows that the V2E2 is an effective trajectory. On theother hand, the VE2M, while exhibiting tremendouspotential, does not line up often. When the plan-ets are aligned properly, however, it can be a veryefficient trajectory. Further validation of the GAP
119

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
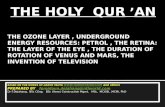
PATH: 3 2 3 4 3 5 Vlnr(km/s): 3.75 4.00 4.25 4.50Search Event No.: 6 ALTM1N = -lOOO.tan Search Min. Ait.: 200.0km
—6.5
•S* I \
*
Table 2 Paths that have no GAP plot
o b o b b b b o o
Launch DateL/D: 980101. TO 32010J. by 5.0 daysTFMAX = 2600.0 Days
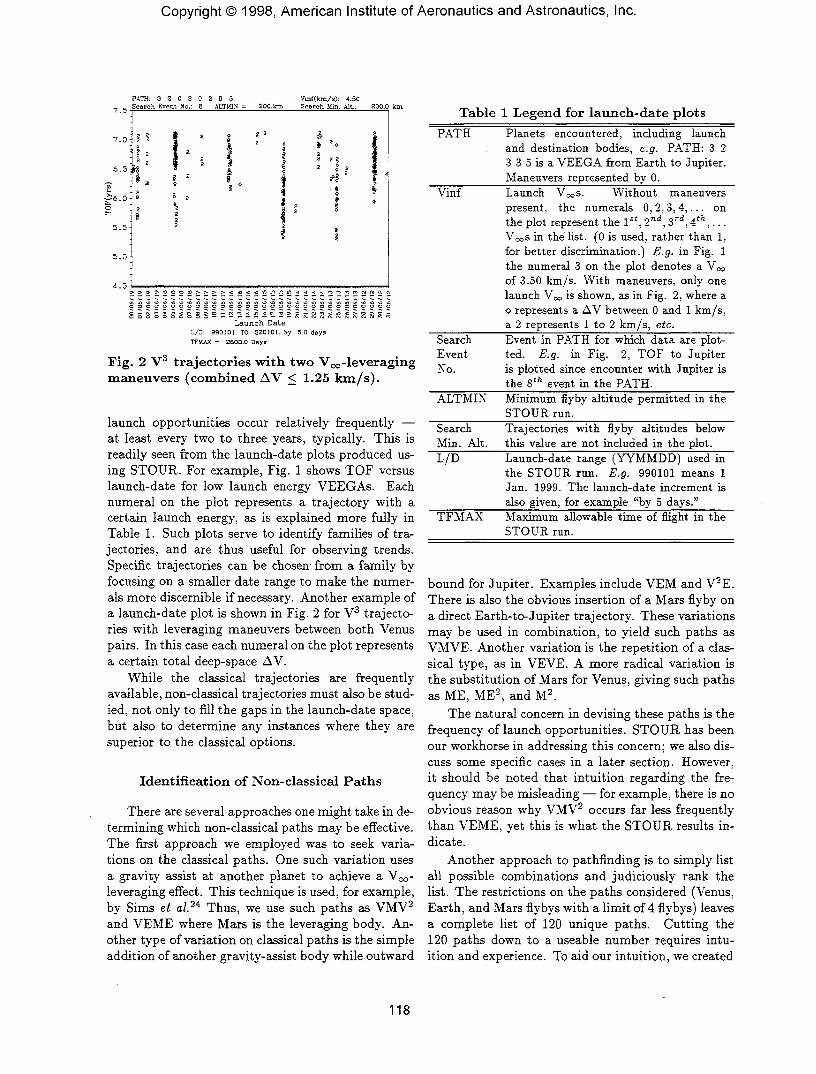
Fig. 4 VEME trajectories.
plots can be seen in Figs. 4 and 5. These figures areSTOUR plots of the VEME and VMVE paths. TheGAP plots predict that these paths should be ableto reach Jupiter with low launch VooS. The STOURplots do in fact confirm this. An interesting charac-teristic of the VMVE plot is the very low TOF case in2021 (i.e. 3.6 yrs). Also notable, is that the path V2Ehas a comparable TOF (about 3.7 yrs) in the sameyear. (VMVE is simply a V2E that uses Mars as aleveraging body.) The planets align almost perfectlyin this year.
Of course, there are some problems with the GAPplots. One drawback is in the assumption to alwaysturn the V^ vector as much as possible without over-turning. In a case such as VEVE, the final aphelionradius is greater if, at the first Earth flyby, the Voovector is turned only enough, or just a little morethan enough, to get to the next Venus. The GAPplots indicate that this is a trajectory that cannotreach Jupiter when, in actuality, the STOUR runsshow that it is very effective. The GAP plots indi-cate that some paths do not even exist (see Table2), because one of the planets in the sequence cannotbe reached. However, these paths do in fact exist ifwe lift our limiting assumptions. Of course, if thesesimple assumptions prevent a GAP plot from exist-ing, this is a good indication that the particular pathis not very useful. As mentioned above, we use theGAP plots to reject some of the 120 possible paths.We eliminate 40 of the paths right away because theyhave Earth as the first flyby planet. This is just thecase of having a AV-EGA before one of the otherpaths. Although the GAP plots give a lot of insight,they tend to be conservative in that they eliminateonly 41 trajectory paths in addition to the 40 men-tioned above. Table 3 gives a list of the 39 paths that
MV MVV MVEMVVV MVVE MVVMMVEM MVMV MVMEMMVV MMVE MMVM
MVM MMVMVEV MVEEMVMM MEMVMMMV
Table 3 Paths reaching Jupiter, based on GAPanalysis
MWEMMEWEEVEVEVEMMMEVEMMEE
VEVEEMMMWEMVEEEVMWMEEEMMEM
MEVEMVVVVVVMVVEEMVMVEMEEMMMME
MMMEEVWEWMEVEMVVMEEMEMEMMMM
WVMEMVVVMVVMMVEMEMEWMEMM
reach Jupiter with a launch Voo less than 8 km/s.
Investigation of a Selected Set of Paths
Due to the long computation time that would beneeded to run all of the 120 flyby combinations inSTOUR, we limited our search to a "selected set" ofpaths, which are listed in Table 6. This selected setcomprises all of the classical paths, and most of thenon-classical paths which appeared to be reasonablecandidates. These candidates are identified using thetwo approaches discussed in the previous section, inconjunction with engineering intuition regarding timeof flight and orbit geometry. For example, the GAPplots indicate that M2, V3, and VE2 all reach Jupiter;thus, adding an extra encounter of the last flyby bodywould probably have little effect on the launch energy,while making the time of flight prohibitively long.Thus there is no need to study M3, V4, and VE3.Other paths, such as M2E, are unattractive becausethe double Mars encounter, when best used, raisesperihelion above Earth's orbit. This eliminates allpaths starting with M2E. Some paths, such as VEVE,are included since they seem to be viable variationsof classical types, in spite of their poor performanceunder the assumptions of the GAP analysis. Also,one 5-flyby path, VMVMV, is considered due to itsdramatic potential for two leveraging-effect gravityassists. Finally it should be noted that Table 6 doesnot contain all reasonable non-classical types, for ex-ample, V3E, V3M, and MEM are missing. These andother paths were rejected because they were deemedless likely to produce many viable results with accept-able TOFs, and because of the time-intensive searches
120

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
PATH: 3 2 4 2 3 5 Vinf(km/s): 3.50 4.00 4.50 5.00 5.50Search Event Xo.: 6 ALTM1N = - lOOO.km Search Ml=. Alt.:
5 !
Launch DateL/D: 990101. TO 320101. by 5.0 daysTFMAX = 2800.0 Days
Fig. 5 VMVE trajectories.involved. For the same reason, an assessment of lever-aging with STOUR was made only for the V2, V3,VEEGA and AV-EGA trajectories of Table 6.
The paths in the selected set were first exam-ined over the whole launch period (1 January 1999to 31 December 2031) using STOUR. To present thisenormous amount of data, we divide the paths intotwo groups, depending on whether Earth is used as aflyby body. (In missions utilizing radioisotope powersources, we can reduce the risk of Earth impact bynot using Earth as a gravity-assist body.) For eachgroup we list up to three of the most attractive tra-jectories in each calendar year (see Tables 4 and 5).In making our selections for each year, we sought lowTOF with 1) low deep-space AV (or above-surfaceflybys), 2) low launch VQQ. and 3) low arrival VQO-Of course, some sort of trade was typically involvedbetween these quantities. As a rough rule of thumb,these quantities are listed in decreasing priority. Ap-proximately speaking, an extra 0.5 to 1 km/s inlaunch Vco, or up to 0.5 km/s in deep-space AV,would only be accepted if it reduced TOF by at leasta year. At the other end of the spectrum, increasesof 0.5 to 2 km/s in arrival Voo would be acceptedeven if TOF was decreased by only 0.5 to 1 years.Sometimes, especially when these quantities changedsimultaneously, rather than choosing between severalgood candidates, up to three were listed, as for theyear 1999 in Table 4, or 2031 in Table 5. A similarselection approach was taken in evaluating the bestthat each path had to offer over the whole launchperiod. These unoptimized trajectories are shown inTable 6. We note that each trajectory listed in thetables is typically a member of a trajectory familythat can show significant variation in the key quan-tities near the same launch date. Thus, for example,mission designers wanting to use Jupiter as a gravity-
assist body for exploration of the outer solar systemshould usually be able to find similar trajectories tothose listed, but with higher arrival V^s.
Optimized versions of the Table 4 and Table 5 tra-jectories up to 2010 are shown in Table 7, along withseveral noteworthy trajectories after 2010. The opti-mization, performed using MIDAS,21 was of launchAV plus deep-space AV. (Flyby times and other dataare listed in these tables to facilitate recreation of thetrajectories.) A comparison of the optimized with theunoptimized trajectories demonstrates the relativelyclose correspondence between the two. One factorwhich affects this correspondence is the granularityof the search in STOUR — the size of the incrementsin launch VTO and launch date. The latter was al-ways taken as 5 days, while the former was typically0.25 km/s (e.g. for the VEEGAs) or 0.5 km/s (e.g.for the V3s), although 1 km/s was used for someof the less interesting paths, such as V2M. In somecases, particularly those involving leveraging, the op-timized solution was considerably better than the un-optimized, due to the fact that STOUR does not tryto optimize the leveraging maneuver for each specifictrajectory; it merely shows that a feasible leveragingfamily exists at a particular time.
It is immediately obvious that the classical VEE-GAs, VEGAs, and V3s dominate the trajectory ta-bles. This indicates that the attention given to thesetrajectories by other researchers, such as Diehl andMyers,10 was well placed. A somewhat surprising re-sult is that the well-known AV-EGA does not per-form well enough to appear in Table 4. Another gen-eral observation is that the best trajectories involvingEarth flybys are significantly better than the best ofthe no-Earth-fiyby trajectories, by almost any perfor-mance measure. This again corresponds well with thechoice by Diehl and Myers to examine only VEGAsand VEEGAs.
The classical trajectories exhibit some unexpectedresonance characteristics. While most of the VEE-GAs have around two years between Earth flybys asexpected, the 99-06-25 and 14-11-23 cases of Table4 exhibit a three year resonance. Roughly half ofthe V3s in Table 5, resonant and non-resonant, haveabout 2 Venus years between the first two Venus fly-bys, and about 4 between the last two, which we de-note by [~ 2; ~ 4]. Roughly half are [~ 2; ~ 3]. Twotrajectories, in 2004 and 2023, manage to achieve a5 Venus-year resonance. Surprisingly, there are twoinstances of a [~ 3;= 3], where the "=" denotes anexact resonance, in 2006 and 2019; these are amongthe worst of the listed V3s. In contrast, the V3s listedin Table 6 are both [~ 2;~ 3], due to their slightlyshorter flight times.
121

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
Table 4 Promising trajectories including Earth flybys (unoptimized)
PathVEVEEVEEVEEVEEVEEVEEVEVEEVEEVEVEEVEEVEEVEMEVEEVEEVEEVEEVEEVEVEVEEVEVEEVEVEEVMVEVEEVEEVMVEWEEWEVEMEVEEVEEVEMVEEMVEVEEVEVEEVEVEVEEVE
LaunchDate
99-03-2799-05-2199-06-2500-08-2301-02-2402-07-1503-11-0704-05-0404-06-1705-10-1206-12-1007-02-2408-12-0909-01-2410-04-1810-07-1711-09-2012-04-1313-10-2914-11-2314-11-2815-05-2716-09-1817-01-0618-07-2518-09-0819-10-2320-03-2620-04-0521-10-2721-11-1322-01-2023-05-3024-08-2825-02-2326-06-1326-08-0927-10-1628-03-0928-03-1929-11-0530-12-2431-04-2331-07-17
LaunchVoo, km/s
4.503.003.753.503.753.504.004.505.003.504.504.004.003.754.003.004.253.504.004.004.503.754.503.754.503.504.003.003.504.003.505.003.253.504.004.253.005.003.504.503.254.503.254.50
Flyby Alt.,0 kmor AV,a km/s
.314(2)
.395(2)
.070(2)
.794(2)
.868(2)
.431(2)
.255(2)
-377,-40(l,2)
-172(4)
-346(4)
+183(3)
-124(2).697(2).699(2)
.674(2)
.690(2)
ArrivalVoo, km/s
5.795.905.776.535.826.076.625.976.556.656.326.566.715.608.276.215.995.885.687.168.496.746.206.648.586.037.436.756.227.326.866.685.586.086.605.757.346.096.096.056.407.636.816.39
TOF,
5.15.87.06.66.65.96.54.46.05.65.16.55.76.16.46.67.66.16.07.37.05.95.16.54.56.65.66.45.43.67.15.96.46.86.15.26.54.86.64.65.66.36.24.1
Flyby Times, bdays after launch
339,947155,438,1259
178,492,r,1588374,754,1590
173,693,r,1424145,633,1256383,776,1623
140,652155,680,1,1410162,476,1300
433,835359,772,1631
152,634,r,1365167,484,1315
365,936,1512,1680133,753,1568
416,777,r,1508181,498,132991,401,r,1131
442,825,r,1921439,999,1289,1880
148,655,r,1386349,924
134,448,r,1179421,1051
160,679,r,1410433,1024,1350,1400
171,506,1,1601156,455,r,1186
148,275,608,663173,616,1087,r,1818
171,563,1390146,461,623,1276
371,942,1538177,699,r,1429431,871,1007
105,577,r,1672,1748390,792
121,746,1460201,712
146,464,1291422,824,913,1607
170,817,1529180,701
"Only flyby altitudes below 200 km are listed; they are prefixed with a 4- or — sign. The parenthetical numbers indicate theassociated flyby number. Deep-space A Vs, if present, are listed without a prefixed sign; the parenthetical numbers indicate theflyby number preceding the maneuver.6 An "r" between the flyby times indicates that resonance occurs on that leg.
In spite of the success of the classical paths, thenon-classical paths play three roles: They occasion-ally provide advantages even over the best classicaltrajectory; they sometimes improve on a classical tra-
jectory in the same year; and lastly, they may providetrajectories in years where no viable classical trajec-tories exist. The first role is exemplified by the 2021VMVE trajectory shown in Tables 4 and 7. Its flight
122

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
Table 5 Promising trajectories without Earth flybys (unoptimized)
PathVMVVVVVVVVVVVVVVVMVVVVVVVVVVVVVMVVVVVVVVVVVVVVVVVMVVVVVVVVVVVVVVVVVVMVMVVVVVVMVVVVVVVVVVVVVVVVVVVVVVVVVVVVVMVVVMVVMVVVVVVVVVVVVMVMVV
LaunchDate
99-04-2600-08-2301-02-2401-04-2202-08-2303-11-2604-07-1505-10-3106-01-2907-04-1407-10-2708-12-0409-02-1210-05-1811-01-1512-04-2713-09-0414-04-0915-07-2915-08-1016-12-2717-01-0618-10-0318-10-2419-01-1120-03-1621-11-2622-03-1422-12-2623-05-2524-08-1725-03-2025-05-1226-08-0726-08-0727-02-0827-11-3028-07-1529-10-1530-12-1931-02-1231-04-23
LaunchVoo, km/s
5.504.504.506.006.004.006.004.507.005.006.504.504.504.506.504.006.507.006.504.506.004.504.505.006.506.004.506.504.505.504.504.506.004.504.508.004.506.004.504.508.005.50
Flyby Alt.," kmor AV,a km/s
1.17(1).145, .230(1, 2)
+177, +17(1, 3)
.519,. 039(2.3)-280(3)
.338, .683(1, 2)1.004,. 554(2, 3)
.791, .278, .452(1,2, 3)-551(1)
-394,-366(l,3)
.617(2)+177(3)+160(1).403(2)
+39(1).338, .522, .649(1, 2,3)
+33(1).292, .491, .304(1, 2, 3)
.857, .390, .043(1, 2, 3).138,.244(1,2)
-34(4)
.230, 1.097, .176(1, 2, 3)
.396(2).453, .893(1, 2)
+142(4)
ArrivalVoo, km/s
6.496.997.337.217.608.157.187.166.827.077.527.117.387.157.287.127.378.988.947.278.187.027.016.986.868.467.167.066.536.977.467.14
10.507.117.455.877.277.327.128.646.207.33
TOP,yrs
6.76.36.46.35.57.26.95.66.96.96.07.17.06.26.27.06.85.26.46.76.47.05.75.96.15.85.76.86.96.96.26.45.67.26.26.56.76.96.26.02.37.2
Flyby Times,days after launch322,616,850,r,1524
365,860,1478187,638,1548397,772,149770,r,519,1246
370,715,1243,1974168,r,617,r,1741
85,580.1270382,963,r,1637
324,r,774,895,1433142,r,592,r,1491
435,893,1812189,595,1246347,786,1510
154,r,603,r,1502181,799,1101,1708
327,r,776,1718143,r,593,r,1267
418,792,1733172,567,1502
304,r,753,1689136,800,994,1558,1665
179,581,1289175,570,667,1278
155,728,r,140279,r,529,1470184,643,1331376,748,1692478,945,164183,596,r,1720365,797,1511173,624,1531160,535,1476
419,515,795,1748419,515,795,r,1469
1563353,833,1473
165,r,614,r,1513414,815,1524399,884,1579
96317,528, 755,r,1429
°Only flyby altitudes below 200 km are listed; they are prefixed with a + or — sign. Theassociated flyby number. Deep-space AVs, if present, are listed without a prefixed sign; theflyby number preceding the maneuver.
"r" between the flyby times indicates that resonance occurs on that leg.
parenthetical numbers indicate theparenthetical numbers indicate the
time is not even 1 year greater than that of a clas-sical Hohmann transfer, while the launch Voo is lessthan half that of the Hohmann. and only minimaldeep-space AV is needed. An instance of the secondrole is the 2023 VEME (Tables 4, 6 and 7), whoselaunch VTO is 0.5 km/s less than the nearest VEEGA
competitor, and whose TOF is also somewhat less.Similarly, the VMV2 in 2012 (Tables 5 and 6) is sig-nificantly better than any 2012 V3. An example ofthe third role is the V2E in 2022 (Table 4), a yearwhere there are no VEGAs or VEEGAs of the typicalsort. (The only comparable VEEGA in 2022 has sim-
123

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
Table 6 The best candidate(s) for each path (unoptimized)
PathEEMVVVVVEVEVMMVMEMEMMVVVVVVWEWMVEVVEEVEMVMVMVMMEEWEEVVMVVEVEVEEMVEMEVMWVMVEVMVMV
Launch LaunchDate Voo, km/s
04-02-24 5.2114-03-03 5.2231-02-12 8.0031-08-06 5.0031-08-14 5.0005-10-01 4.5015-07-06 4.00No feasible trajectoriesNo feasible trajectories12-08-05 5.5026-11-15 6.0018-05-19 7.0001-04-22 6.0018-10-03 4.5020-03-08 4.0003-09-07 7.75No feasible trajectories29-11-05 3.2526-06-13 4.2505-10-31 5.50No feasible trajectories00-12-21 5.0018-09-17 3.5018-10-24 5.0026-08-27 3.5026-08-09 3.0023-05-30 3.2512-04-27 4.0021-10-27 4.0017-01-06 4.50
Flyby Alt.,0 kmor AV," km/s
.875(0)
.585(0)
.376,1.160(1,2)1.493(2).179(2)
.403(2)
-964(1)
+183(3)-266,-604(l,3)
-346(4)+160(1)
ArrivalV^, km/s
6.545.816.207.047.246.387.62
5.608.945.427.217.016.036.60
6.405.757.13
8.067.096.988.277.345.587.127.327.02
TOF,yrs
4.16.72.34.24.55.16.2
5.03.96.36.35.75.95.5
5.65.26.6
7.06.85.96.36.56.47.03.67.0
Flyby Times,0
days after launch678141196
178,633174,r,624416,859177,891
640,837145,777
78,r,1452397,772,1497179,581,1289103,592,1175
408,r,1082,1180
146,464,1291431,871,1007404,834,1479
746, 1127, r,1858159,r,609,1041,r,1772
175,570,667,1278176,695,1043,1590
105,577,r,1672,1748146,461,623,1276
181,799,1101,1708148,275,608,663
136,800,994,1558,1665"Only flyby altitudes below 200 km are listed; they are prefixed with a + or - sign. Theassociated flyby number. Deep-space A Vs, if present, are listed without a prefixed sign; theflyby number preceding the maneuver, with 0 signifying Earth launch.6 An "r" between the flyby times indicates that resonance occurs on that leg.
parenthetical numbers indicate theparenthetical numbers indicate the
ilar launch energy — uncharacteristically high for aVEEGA — but slightly worse arrival V^ and TOF.)
It is interesting to note that while Mars can befrequently used as a leveraging body for the VEE-GAs (see Fig. 4), it seldom improves performance,as witnessed by the dearth of VEME trajectories inTable 4. On the other hand, Mars is much less of-ten available as a leveraging body with the V3s, butwhen it is available, it is very efficacious (see Table 5).Also, it is seen that VMV2 trajectories are more effec-tive than V2MV. One reason for this is that with theVMV2 there are two Venus flybys available to turnthe increased Voo, rather than just one. Mars neednot always be used as a leveraging body. For exam-ple, it can be used in 2031 to improve on the classicalHohmann transfer, in terms of both TOF and launchenergy.
For many of the non-classical paths, the optimalrelative alignment of the planets does not recur of-ten. The Mars gravity assist recurs every 47 to 49years. The remarkable 2021 VMVE repeats in simi-lar form about every 45 years, although a slight shiftoccurs after the beginning of the 22nd century. Forthis path, the relative orientations of 2021 are some-times not repeated as precisely as those of the 2031Mars gravity assist. This might be expected, becauseit involves the realignment of four planets, not justthree, whose periods are not in simple ratios to eachother.
Conclusions
We have taken a systematic approach to the iden-tification of low-energy, gravity-assist trajectories toJupiter with launch opportunities in the next three
124

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
Table 7 Optimized trajectories
PathVEVEEVEEVEEVEEVEEVEEVEEVEVEEVEVEEVEEVEEVEMEVEEVMVVVVVVVVVVVVVVVMVVVVVVVVVVVVVMVVVVVVVVVVVVVVVMVVMVEVEMEVEEMM
LaunchDate
99-03-2799-05-1699-06-0900-08-1101-02-2402-07-2303-11-1904-03-1204-04-2305-10-2806-12-1607-02-2808-12-0909-01-2110-04-0610-07-2199-04-2700-08-0401-03-0401-04-2402-08-2503-12-0104-07-0905-10-3006-01-0407-04-0907-10-1008-12-0109-02-2110-05-1918-11-0221-10-2723-05-2826-08-0331-02-15
LaunchVoo, km/s
4.503.033.373.073.753.403.803.564.143.144.053.934.023.683.692.945.462.973.895.934.543.945.344.205.344.875.784.263.774.284.673.993.252.937.84
Deep-spaceAV, km/s
.298
.27600000
.471
.7190
.8130000
.3600
.734
.3600
.4380
.037
.508
.1710
.011
.6081.0441.098
0.425
000
ArrivalVoo, km/s
5.806.105.556.555.826.566.626.366.036.656.206.566.705.508.276.216.496.627.337.247.928.058.607.456.837.068.367.567.366.427.056.905.587.345.83
TOF,yrs
5.15.87.36.66.65.76.56.34.35.64.96.55.76.36.46.66.76.66.46.35.47.26.56.37.06.95.96.97.07.06.13.76.46.62.5
Fly by Times,0days after launch
339,947157,438,1257
175.513,r,1608387,766,1604
173,693,r,1423140,624,1247373,764,1610
122,740,r,1470145,663
153,458,1282429,822
355,768,1626152,634,r,1364172,488,1320
377,947,1523,1692129,747,1560
320,615,848,r,1522393,825,1523
173,r,628,r,1539394,770,149477,527,1244
365,710,1237,1968162,r,611,r,1737
89,576,1278403,991,r,1660
329, r, 779, 900, 1438155, r, 605, r, 1503430,r,888,r,1805173,565,r,1240349,837,1483
164,563,660,1267148,275,607
147,463,624,1278110, 582,r,1678, 1753
95°An "r" between the flyby times indicates that resonance occurs on that leg.
decades. Starting from a list of all possible combi-nations of up to four flybys with Venus, Earth, andMars, we used energy considerations, estimates oftime of flight, and engineering judgement to reducethe number of paths to a selected set of 25 cases.We then employed an automated design program tocalculate all occurrences of each path for the 33-yearlaunch period. We also identified the AV-optimalpaths for the first decade.
While we make no claim that these are global opti-mal solutions, we believe that our results are broadlyrepresentative of the effectiveness of both classicaland non-classical trajectory paths. The methods wehave presented should be applicable in the search forgravity-assist trajectories to other solar system bod-
ies; we hope our trajectories to Jupiter will providedesigners with useful benchmarks for future missionsto our largest planet.
Acknowledgments
This research has been supported in part by theJet Propulsion Laboratory, California Institute ofTechnology under Contract Number 961211. We aregrateful to Dennis V. Byrnes (Technical Manager),Jan M. Ludwinski, and Robert W. Maddock for pro-viding useful information, guidance and helpful sug-gestions. We also thank Nathan J. Strange, a gradu-ate student in the School of Aeronautics and Astro-nautics at Purdue University, for his assistance.
125

Copyright© 1998, American Institute of Aeronautics and Astronautics, Inc.
References
^roucke, R. A., "The Celestial Mechanics ofGravity Assist," AIAA Paper 88-4220, Aug. 1988.
2Battin, R. H., An Introduction to the Mathemat-ics and Methods of Astrodynamics, AIAA EducationSeries, AIAA, New York, 1987, pp. 423-424.
3Battin, R. H., "The Determination of Round-trip Planetary Reconnaissance Trajectories," Journalof the Aero/Space Sciences, Vol. 26, No. 9, Sept. 1959,pp. 545-567.
4Sedov, L. L, "Orbits of Cosmic Rockets Towardthe Moon," ARS Journal, Vol. 30, No. 1, Jan. 1960,pp. 14-21.
5Deerwester, J. M., "Jupiter Swingby Missions tothe Outer Planets," Journal of Spacecraft and Rock-ets, Vol. 3, No. 10, Oct. 1966, pp. 1564-1567.
6Flandro, G. A., "Fast Reconnaissance Missionsto the Outer Solar System Utilizing Energy Derivedfrom the Gravitational Field of Jupiter," Astronau-tica Acta, Vol. 12, No. 4, 1966, pp. 329-337.
7Gillespie, R. W., Ragsac, R. V., and Ross,S. E.. "Prospects for Early Manned InterplanetaryFlights," Astronautics and Aerospace Engineering,Vol. 1, No. 7, Aug. 1963, pp. 16-21.
8Hollister, W. M., "Mars Transfer via Venus,"AIAA/ION Astrodynamics Guidance and ControlConference, AIAA Paper 64-647, Los Angeles, CA,Aug. 1964.
9Minovitch, M. A., "The Determination andCharacteristics of Ballistic Interplanetary Trajecto-ries Under the Influence of Multiple Planetary At-tractions," Jet Propulsion Laboratory, Technical Re-port No. 32-464, Pasadena, CA, Oct. 1963.
10Niehoff, J. C., "Gravity-Assisted Trajectoriesto Solar System Targets," Journal of Spacecraft andRockets, Vol. 3, No. 9, Sept. 1966, pp. 1351-1356.
nRoss, S., "Trajectory Design for Planetary Mis-sion Analysis," Recent Developments in Space FlightMechanics, edited by P. B. Richards, Vol. 9, Sci-ence and Technology Series, AAS, Washington, D.C.,1966.
12Sohn, R. L., "Venus Swingby Mode for MannedMars Missions," Journal of Spacecraft and Rockets,Vol. 1, No. 5, Sept.-Oct., 1964, pp. 565-567.
13Sturms, F. M. and Cutting, E., "TrajectoryAnalysis of a 1970 Mission to Mercury via a CloseEncounter with Venus," AIAA Second Aerospace Sci-ences Meeting, AIAA Paper 65-90, New York, NY,Jan. 1965.
14Stancati, M. L., Friedlander, A. L., and Bender,D. B., "Launch Opportunity Classification of VEGAand AV-EGA Trajectories to the Outer Planets,"AIAA Paper 76-797, Aug. 1976.
15Diehl, R. E. and Myers, M. R., "Gravity-AssistTrajectories to the Outer Solar System," Jet Propul-sion Laboratory, JPL Publication D-4677, Pasadena,CA, Sept. 1987.
16Williams, S. N., "Automated Design of MultipleEncounter Gravity-Assist Trajectories," M.S. Thesis,School of Aeronautics and Astronautics, Purdue Uni-versity, West Lafayette, IN, Aug. 1990.
17Rinderle, E. A., "Galileo User's Guide, MissionDesign System, Satellite Tour Analysis and DesignSubsystem," Jet Propulsion Laboratory, JPL Publi-cation D-263, Pasadena, CA, July 1986.
18Patel, M. R., "Automated Design of Delta-VGravity-Assist Trajectories for Solar System Explo-ration," M.S. Thesis, School of Aeronautics and As-tronautics, Purdue University, West Lafayette, IN,Aug. 1993.
19Patel, M. R. and Longuski, J. M., "AutomatedDesign of Delta-V Gravity-Assist Trajectories for So-lar System Exploration," AAS/AIAA AstrodynamicsSpecialist Conference, AAS Paper 93-682. Victoria.British Columbia, Aug. 1993.
20Staugler, A. J., "STOUR (Satellite Tour De-sign Program) User's Guide for the AV-EGA _andVTC-Leveraging Routines," Technical Report, Schoolof Aeronautics and Astronautics, Purdue University,West Lafayette, IN, June 1996.
21Sauer, C. G., "MIDAS: Mission Design andAnalysis Software for the Optimization of BallisticInterplanetary Trajectories," Journal of the Astro-nautical Sciences, Vol. 37, No. 3, July-Sept., 1989,pp. 251-259.
22Hollenbeck, G. R., "New Flight Techniques forOuter Planet Missions," American Astronautical So-ciety, AAS Paper 75-087, July 1975.
23Sims, J. A., "Delta-7 Gravity-Assist TrajectoryDesign: Theory and Practice," Ph.D. Thesis, Schoolof Aeronautics and Astronautics, Purdue University,West Lafayette, IN, Dec. 1996.
24Sims, J. A., Longuski, J. M., and Staugler,A. J., "Voo Leveraging for Interplanetary Missions:Multiple-Revolution Orbit Techniques," Journal ofGuidance, Control, and Dynamics, Vol. 20, No. 3,May-June, 1997, pp. 409-415.
126