Experiences in Developing a Robotics Course for Electronic ... file1996 Kingdom of Saudi Arabia:...
12
Paper ID #7210 Experiences in Developing a Robotics Course for Electronic Engineering Tech- nology Dr. Antonio Jose Soares, Florida A&M University/ Antonio Soares was born in Luanda, Angola, in 1972. He received a Bachelor of Science degree in Electri- cal Engineering from Florida Agricultural and Mechanical University in Tallahassee, Florida in December 1998. He continued his education by obtaining a Master of Science degree in Electrical Engineering from Florida Agricultural and Mechanical University in December of 2000 with focus on semiconductor de- vices, semiconductor physics, Optoelectronics and Integrated Circuit Design. Antonio then worked for Medtronic as a full-time Integrated Circuit Designer until November 2003. Antonio started his pursuit of the Doctor of Philosophy degree at the Florida Agricultural and Mechanical University in January 2004 under the supervision of Dr. Reginald Perry. Upon completion of his PhD, Dr. Soares was immediately hired as an assistant professor (Tenure Track) in the Electronic Engineering Technology department at FAMU. Dr. Soares is conducting research in education (STEM), Optoelectronics, nanotechnology and robotics. Dr. G. Thomas Bellarmine P.E., Florida A&M University/Florida State University Biography Dr. G. Thomas Bellarmine Professor Florida A&M University Tech. Bldg. B, Room 202 Tallahassee, FL 32307 850-599-868 (Office) 830-561-2739(fax) [email protected] Dr. G. Thomas Bellarmine is currently working at Florida A&M University as Professor of Electronic Engi- neering Technology. He is currently teaching Electronic and Computer Engineering Technology Courses. He obtained his BSEE degree from Madras University and MSEE degree from Madurai Kamaraj Uni- versity in India. He received his PHD in EE from Mississippi State University and M.S. in Computer Science from The University of West Florida. He is currently an IEEE Senior Member and a Member in ASEE. He is also a Registered Professional Engineer. His research interest includes power systems, energy management systems, and computer applications in communications. Dr. Doreen Kobelo, Florida A&M University/Florida State University Prof. Rabbani Muhammad, Florida A&M University Rabbani Muhammad AIA NCARB, Reg. Architect Rabbani Muhammad Architects AIA. NCARB 1801 Meridian Rd Suite B Tallahassee, Fl 32303 r.muhammad @att.net [email protected] Cell 850-264-5268 Education: Pennsylvania Institute of Technology, AAD Arch, Industrial Structural Design, Eng. Technology Howard University, Washington D.C. B. Arch Harvard University, Cambridge, Mass. M. Arch Mass. Institute of Technology Pennsylvania Institute of Technology A.Dp Eng.Tech; Industrial Structural Design; Architec- tural Design Teaching Experience: Maryland Institute of Technology Illinois Technical College Temple No.2 Adult Education Classes Umm Al- Qura, College Of Engineering, School of Islamic Architecture, Kingdom of Saudi Arabia Florida A&M University, College of Engineering, Sciences, Technology and Agriculture Project Area Coordi- nator, Construction Engineering Technology Florida A&M University College of Architecture, Master Thesis Reviewer Academic Administration: Interim Director of Division of Engineering, CESTA 1996-98 Program Area Coordinator, Construction Engineering Technology Related Membership Organizations: American Institute of Architects National Council of Architectural Registration Board National Historical Preservation Society Alpha Rho Chi National Architectural Fraternity Alpha Phi Omega National Service c American Society for Engineering Education, 2013 Page 23.568.1
-
Upload
truongkien -
Category
Documents
-
view
212 -
download
0
Transcript of Experiences in Developing a Robotics Course for Electronic ... file1996 Kingdom of Saudi Arabia:...

Paper ID #7210
Experiences in Developing a Robotics Course for Electronic Engineering Tech-nology
Dr. Antonio Jose Soares, Florida A&M University/
Antonio Soares was born in Luanda, Angola, in 1972. He received a Bachelor of Science degree in Electri-cal Engineering from Florida Agricultural and Mechanical University in Tallahassee, Florida in December1998. He continued his education by obtaining a Master of Science degree in Electrical Engineering fromFlorida Agricultural and Mechanical University in December of 2000 with focus on semiconductor de-vices, semiconductor physics, Optoelectronics and Integrated Circuit Design. Antonio then worked forMedtronic as a full-time Integrated Circuit Designer until November 2003. Antonio started his pursuit ofthe Doctor of Philosophy degree at the Florida Agricultural and Mechanical University in January 2004under the supervision of Dr. Reginald Perry. Upon completion of his PhD, Dr. Soares was immediatelyhired as an assistant professor (Tenure Track) in the Electronic Engineering Technology department atFAMU. Dr. Soares is conducting research in education (STEM), Optoelectronics, nanotechnology androbotics.
Dr. G. Thomas Bellarmine P.E., Florida A&M University/Florida State University
Biography Dr. G. Thomas Bellarmine Professor Florida A&M University Tech. Bldg. B, Room 202Tallahassee, FL 32307 850-599-868 (Office) 830-561-2739(fax) [email protected] Dr. G.Thomas Bellarmine is currently working at Florida A&M University as Professor of Electronic Engi-neering Technology. He is currently teaching Electronic and Computer Engineering Technology Courses.He obtained his BSEE degree from Madras University and MSEE degree from Madurai Kamaraj Uni-versity in India. He received his PHD in EE from Mississippi State University and M.S. in ComputerScience from The University of West Florida. He is currently an IEEE Senior Member and a Memberin ASEE. He is also a Registered Professional Engineer. His research interest includes power systems,energy management systems, and computer applications in communications.
Dr. Doreen Kobelo, Florida A&M University/Florida State UniversityProf. Rabbani Muhammad, Florida A&M University
Rabbani Muhammad AIA NCARB, Reg. Architect Rabbani Muhammad Architects AIA. NCARB 1801Meridian Rd Suite B Tallahassee, Fl 32303 r.muhammad @att.net [email protected] Cell850-264-5268 Education:
Pennsylvania Institute of Technology, AAD Arch, Industrial Structural Design, Eng. Technology HowardUniversity, Washington D.C. B. Arch Harvard University, Cambridge, Mass. M. Arch Mass. Institute ofTechnology Pennsylvania Institute of Technology A.Dp Eng.Tech; Industrial Structural Design; Architec-tural Design
Teaching Experience:
Maryland Institute of Technology Illinois Technical College Temple No.2 Adult Education Classes UmmAl- Qura, College Of Engineering, School of Islamic Architecture, Kingdom of Saudi Arabia FloridaA&M University, College of Engineering, Sciences, Technology and Agriculture Project Area Coordi-nator, Construction Engineering Technology Florida A&M University College of Architecture, MasterThesis Reviewer
Academic Administration:
Interim Director of Division of Engineering, CESTA 1996-98 Program Area Coordinator, ConstructionEngineering Technology
Related Membership Organizations:
American Institute of Architects National Council of Architectural Registration Board National HistoricalPreservation Society Alpha Rho Chi National Architectural Fraternity Alpha Phi Omega National Service
c©American Society for Engineering Education, 2013
Page 23.568.1

Paper ID #7210
Fraternity Kappa Alpha Psi National Social Fraternity National Alliance of Black School Educators Na-tional Black Engineers Society
Licenses to Practice Architecture:
Washington D.C. State of Illinois State of New York State of Pennsylvania State of Florida
Awards:
Teacher of the Year, Florida A&M University, Division of Engineering Technology, College of Engineer-ing, Sciences, Technology and Agriculture 1993, 1994 and 2000 Zeta Educational Thespian AssociationDesign Award Kopper Corporation Design Completion Design Award, 1st Place
Research Travels:
Mexico City, Mexico Dakar, Senegal Edmonton, Canada Lagos, Nigeria London, England Santo Domingo,Dominican Republic Paris, France Nassau, Bahamas Roma, Italy (Guest of Pope John Paul II ) Amster-dam, Netherlands Athens, Greece Lisbon, Portugal Istanbul, Turkey Seville, Spain Makkah Al- Mukarama,Kingdom of Saudi Arabia (Hajj 1982, 1988, 1996) Beijing, China Jakarta, Indonesia Accra, Ghana Cairo,Egypt Lome, Togo Munich, Germany Brussels, Belgium Jeddah, Kingdom of Saudi Arabia Addis Abba,Ethiopia United Arab Emirates Rabbani Muhammad Architects Design Projects Overview
Housing Project Current Planning Stage:
23 unit housing sub-division, Nashville, Tenn. (Design) 11 unit hosing sub- division, Saluda, SouthCarolina (Design) 30 assistant living facility units, Definaick Springs, Fl. (Design)
Completed Planning and Approval Stage Projects:
24 – Three –bedroom town homes, Markham, Illinois (Design)
Completed Renovation Projects:
Shabazz Cluster Housing 39 units Harlem, New York (Design) Washington D.C In-fill sites 100units(Design) 58 units Housing for the Elderly, Greenville, South Carolina (Design) Many single family units
Completed New Housing Units:
124 units mixed use housing project Lincoln Ave Apartments, Chicago, Ill (Design) 12 units -StudentHousing Apartments, Tallahassee, Fla. A&M University (Design) Shabazz development Housing 40three family town homes, Harlem, NY (Design and Project Administration)
Projects Under Design/ Construction Stage:
Graceline Condominiums 104 West 116th Street 58 units w/ Commercial (Design) Booker T Washing-ton Shopping Plaza, Chicago, IL Columbus, Ohio, Afro-American Basketball, Museum and EducationalCenter
Large Scale Projects International:
1996 Kingdom of Saudi Arabia: Madinah New town, a community that is composed of 1100 signalfamily housing units. These units where built with 3-bedrooms, 2.5 baths, living, dining and kitchen.Also, included in this project were commercial, retail and security buildings. A major play areas whereplaced throughout the internal park system. (Design and Construction Management) Madinah, KSA Sk.Fausi Tafik Villa, Makkah, KSA Sk. Aggah Villa, Makkah, KSA
Preservation Projects:
Matilda Mosley House ( Zora Neal Hurston Residence) Eatonville, Fl. Design and Construction andmanagement) Malcolm Shabazz Masjid Preservation Project
Religious Projects:
National Primitive Baptist Convention Multi- Purpose Building and Memorial Park, Huntsville, Al (Present)St. Johns MEB Educational Facility, Tallahassee, Fl. 1997 St. Paul’s AME Church Addition, Tallahassee,Fl 2004 Antioch AME Church Addition, Quincy, Fl 1995 Masjid Al-Nalh, Masjid Addition, 2007
Munree Cemetery Planning and Design, Tallahassee, Fl
c©American Society for Engineering Education, 2013
Page 23.568.2

Paper ID #7210
Hotel Projects:
Days Inn Renovation, Tallahassee, Fl Scottish Inn Hotel, Jacksonville Fl. Days Inn Renovation, Live Oak,Fl Dutch Inn Renovations and Addition, Tallahassee, Fl
Food Preparation Projects:
Ferrell Restaurant Renovation, Tallahassee, Fl 2006 L’Jau’s Restaurant Renovation, Albany, Georgia 2007Halal Abattoir, New Plant, Jackson County, Fl 2000 Ferrell Ice Cream Shop, Tallahassee, Fl 2005 159thSt Shopping Center, Markham, Ill 2005 Banquet and Social Hall, Prince Georges County, Md 2007 GotFish Fast Food Restaurant, Chicago, Ill
Medical Facility Projects:
200 Bed Hospitals, Kingdom of Saudi Arabia, 1987 100 Bed Hospitals, KSA, Arar, KSA 1986 SoutheastMedical Clinic, Washington D.C. 1973 Doctors Office, Pioneer Building, Chicago, II 1976 Glover DentalOffices, Albany Georgia, 2006
Urban Planning and Design Projects
14th Street Urban corridor, Washington D.C Anacostia Southeast Washington D.C. Plan 8th Street Cor-ridor Washington D. C. Harlem, New York 116th Street and Malcolm Shabazz Blvd. Revitalization andRestoration Plan East New York High School, Planning and Design, Brooklyn, New York Calvert CountyHigh School, Planning and Design, Calvert County, Maryland
Community Service:
Religious Advisor Volunteer from 1970 to Present to the following Departments of Corrections FloridaDepartment of Correction Death Row Inmates, Lecturer Mass. Department of Corrections, EducationVirginia Department of Corrections, Lecturer Federal Department of Corrections, Lecturer
STEM Educational Project Papers ASEE paper on the STEM Summer Educational Institute in MagnoliaTerrace, Tallahassee, Fl ASEE paper on co authored a Paper in Robotics in the Building Design
Dr. Chao Li, Florida A&M University
Dr. Chao Li is an assistant professor in Electronic Engineering Technology at Florida A&M University.He teaches electronic and computer engineering technology courses. He obtained his B.S.E.E. degreefrom Xi’an Jiaotong University and M.S.E.E. degree from the University of Electronic Science and Tech-nology of China. He received his Ph.D. in E.E. from Florida International University. He is an IEEE seniormember and an ASEE member. His research interests include signal processing, biometrics, embeddedmicrocontroller design, and application of new instructional technology in classroom instruction.
Dr. Salman A. Siddiqui, Florida A&M University
Salman A. Siddiqui received his B.S., M.S. and Ph.D. degrees from Florida State University, Tallahassee,FL, from the FAMU-FSU College of Engineering in the field of Electrical Engineering in 2000, 2002,and 2012, respectively. The M.S. degree was in the field of communications while the Ph.D. degree wasin the field of Robotics. He has a passion to teach and to make it interesting and simple for students toadvance in the field of Electrical/Electronic Engineering and STEM in general. He has been teaching asan adjunct Professor at the FAMU Electronic Engineering Technology program since 2010.
Mr. Stacy Tinner
c©American Society for Engineering Education, 2013
Page 23.568.3

Experiences in Developing a Robotics Course for Electronic
Engineering Technology
Developing a robotics course for an engineering technology program has proven to be a
challenge. Most textbooks and/or robotic programs are designed for engineering programs. As
such, there is a great deal of mathematical modeling and analysis which is not fitting for a
technology curriculum. At the other end of the spectrum, there are a myriad of low level robotics
based curriculum such as the LEGO or the Parallax Boe-bot robot platforms. These are normally
used in K-12 educational and summer programs. This paper presents the process of developing a
suitable robotics course for electronic engineering technology program (EET). We first present
the challenges encountered when developing the course content to suit the engineering
technology curriculum. The curriculum content for both classroom lecture and laboratory
sections are then discussed. A discussion of competition-based projects designed to enhance and
gauge the overall understanding of the course material is then presented. Finally, initial efforts to
make the course an interdisciplinary course are discussed.
Challenges
The initial steps in designing this course were to conduct research on existing technology
programs offering similar courses. There are several programs offering robotics course which are
designed for electrical engineering, manufacturing and/or Mechatronics. Most of these courses
emphasize modeling of robotics motion, controlling actuators and machine programming
techniques such as Computer Numerical Control (CNC) 1, 2
. The modeling of motion using
kinematics and reverse kinematics principles can be very involved and requires a great deal of
matrices manipulation. This calls for the instructor to dedicate a great deal of time introducing or
reviewing mathematical principles such as vectors, dot product, cross product, matrices, etc. In
order to follow a manufacturing curriculum, one must have some infrastructure to implement the
laboratory which our institution does not own at this time. On the other hand, there were many
courses and summer programs on robotics which make use of robotic kits such as the LEGO
MindStorms. The curriculum is normally designed for K-12 students and short summer programs.
The issue with these curriculums is their simplicity. The same trend was observed when
researching for books to be used for the robotics course 1, 2, 3, and 4
. There wasn’t a middle ground
which would be suitable for an engineering technology program. On one hand we have complex
curriculums and on the other simple curriculums. The solution was to make use of information
from the upper and lower level and create a new curriculum which is balanced and adequate for
our program.
Page 23.568.4

Curriculum
It is imperative that the course educational objectives correlate with our program goals and the
Accreditation Board for Engineering and Technology (ABET) educational outcomes. In addition,
when designing the curriculum, existing courses that may serve as pre-requisites must be taken
into account. This will ensure that course content doesn’t become redundant and helps in
designing course topics. Some courses that correlate with this new course include C
Programming, Circuits Design, Controls, Instrumentation, Electronics Design and Digital
Electronics. Based on these factors, comprehensive course description was developed and reads
as follows: “The Introduction to Robotics and Automation course introduces students to the
fundamental concepts of robotics, automation and Mechatronics. Students will learn how to
design robots using a Mechatronics approach. Principles of mechanical systems, electronics, and
programming as applied to the design, building, and mobilization of autonomous robots. Topics
include microcontrollers, actuators, sensors, communication systems and interfaces, and
programming using the Parallax Boe-Bot Robot. In addition, students are briefly introduced to
industrial robot modeling and programming using CNC Technology. Experiments using the RS-
55 industrial robot arm will reinforce the theory introduce in class”.
Course Objectives and Outcomes
The course is structured into a three credit hour lecture and a one credit hour laboratory. The
lectures included conventional power point presentations and in class demonstrations. In the
laboratories students implemented concepts learned during the lecture. The content of the lecture
was set in a progressive fashion so that the construction of the laboratory platform coincided
with the topics being discussed in the lecture. By mid semester the platform was complete and
additional peripherals such as the different type of sensors, motor drivers, controllers and
displays were added as the theory behind them was being introduced in the lecture.
The overall objectives of the course were:
To understand the process of robotics design, modeling and programming
To understand the main component of a robot and a robotic system
To gain knowledge of different types of robots and their application
To be able to design and program robots based on a set of specifications such as light,
sound, and obstacles
To gain some knowledge in robot kinematics and robot modeling
To be exposed to Mechatronics design procedure and concepts
Be able to complete projects individually and in group
To gain critical thinking skills when making robot design decisions
Be able to perform laboratory experiments using a robot kit
Be able to write technical reports
Be able to conduct research in innovative robotics topics for class presentation
Page 23.568.5

Students were given weekly assignment and quizzes. Quizzes were given at the beginning of
class to ensure students get to class on time. There were also group quizzes where students were
given a problem to solve and then form groups to discuss with each other. Then a student from
one of the groups came to the board and solved the problem. This method helped students that
may have missed the concepts and also ensured that the students were working in the group.
Upon successful completion of the course, students were able to:
Describe the history and evolution of robots
Describe the fundamental components of a robotic system
Demonstrate knowledge in principles of automation and industrial robot systems
Explain the basic principles of robot motion and kinematics
Identify different types of robots and their applications
Explain the science of Mechatronics
Explain the operation of light, touch, and rotation sensors that are used in robotics.
Describe the operation and application of microcontrollers.
Develop computer programs used to control robots
Build and test robots using a specific platform
Participate in team projects to compete with other design teams
Develop and maintain a team webpage to share information
Course Content
To achieve the course goals and due to the limited amount of time in a semester, the Parallax
Boe-Bot robotic kit platform was selected. Figure 1 depicts different kits. The main reason for
selecting this kit was the fact that the instructor had several sets available and is suitable for
demonstrating basic robotics principles. The course content was divided into four main parts: (1)
Mechanical; (2) Electrical; (3) Microcontroller and Software; and (4) Automation and
Mechatronics.
Figure 1 The Parallax Boe-Bot Robot Kit
Page 23.568.6

The mechanical portion of the course covered topics relevant to the design of a robot and
introduced some related physics and mathematics topics. We started by studying different types
of materials for building robots based on applications. When designing a robot the type of
material can make a big difference when it comes to energy consumption and functionality. We
then introduced simple machines such as inclines, levers, pulleys, and springs. In this portion of
the course several physics concepts are introduce. Some of these include mass, weight, force,
torque, spring physics, velocity and acceleration. In addition, some mathematical topics, such as
trigonometric functions, are discussed.
The electrical module of the course was designed based on the enrolled students’ background.
All enrolled students were in a junior level. As such, they had been exposed to most of the
electrical principles needed to design and understand a robotic system. However, a brief review
was needed on basic topics such as electrical charge, current, voltage, resistance, Ohm’s Law,
and voltage and current division. In a higher level, diodes, transistors and OPAMPS were
discussed. Several relevant circuit configurations were presented in great details. These included
diode voltage regulators, transistor switches and drivers, OPAMP inverters, summers and
amplifiers. Other electrical components specific to moving robots were also discussed. Different
types of motors (AC, DC, Stepper, and Servo Motors), their functionality and application were
presented. Mechanical, electrical and optical sensors were also discussed in great detail. They
included the whisker, infrared, sonar, and phototransistor sensors.
General principles of microcontrollers are introduced. Although several microcontrollers are
discussed, the one used by the Boe-Bot platform is discussed in depth as it is the one used in
laboratory experiments. Topics include types of memory, interfacing, and analog and digital
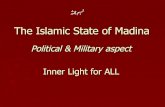
signals. The Parallax Boe-Bot Robot uses the BASIC Stamp 2 module shown in Figure 25. Over
the years several versions (BS2, BS2 OEM, BS2sx, etc.) of the module has evolved. The
difference among these modules includes upgrades on memory, speed and additional features.
The module used in this course is the BASIC Stamp BS2 Module.
Figure 2 BASIC Stamp 2 Module with components (shown on left) and I/O Pins (on right)
Page 23.568.7

The BASIC Stamp is programmed in PBASIC, a version of BASIC programming language.
The BASIC Stamp is programmed using a free software package, BASIC Stamp Editor. Code is
written in the editor and downloaded to the BASIC Stamp 4, 5
.
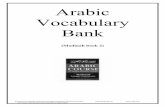
The BASIC Stamp can be used on a variety of carrier boards, used for programming and
testing. The board makes it easy to connect a power supply and programming cables to the
BASIC Stamp module and makes it easy to build circuits to be connected to the BASIC Stamp
module to perform a variety of functions. The most popular carrier boards used to support the
BASIC Stamp are the Board of Education (BoE) and the HomeWork Board (HWB) which are
depicted in Figure 3. The HWB has the module integrated into it while on the BoE the module is
mounted on an IC and can be removed and replaced 5, 6
. The Boe-Bot uses the BoE carrier board.
Figure 3 Board of Education (Left) and the HomeWork Board (Right)
In the early stage of the course this stand alone embedded system was used in laboratory
experiments to illustrate concepts related to robotics. Table 1 shows a set of hands on exercises
that were performed using the board.
Table 1 Exercises Performed with the Board of Education
Exercise Deliverables
Intro to BASIC Stamp
Software
Install the Software, Write basic programs, use the Debug
Terminal display messages, Perform simple arithmetic,
ASCII code
Simple Indicator Circuits Build and test LED circuits, Build LED circuits as event
indicator, Controlling LED ON/OFF Cycles
Digital Control Inputs Build Pushbutton circuits, Control LED circuits using
pushbuttons, initiate events using pushbuttons
Frequency and Sound Build speaker circuit, use speaker circuit as a start and
battery indicator, creating melodies
Seven Segment Display Use the board to control a seven segment display circuit to
display digits
Page 23.568.8

The lecture related to these experiments were an introduction to the PBASIC language, a review
of resistors, diodes, circuit configurations, current and voltage, digital versus analog systems, and
general seven segment display configurations. Due to the limited amount of time and the
expected outcomes of the course, students were introduced to the basic concepts and through
assignment were expected to build upon them in order to perform the hands on portion of the
course.
The Boe-Bot
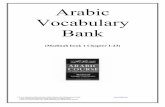
Once the microcontroller principles were introduced, the course moved towards building and
programming the Parallax Boe-Bot Robot. The kit contains all components necessary to
construct the robot: aluminum chassis, servo motors, battery case, wheels, and the needed screws
and washers. In addition, there are number of sensors such as whisker and infrared. Additional
components were provided by the instructor when necessary. Once the board of education is
added to the chassis, the servos can be controlled for motion and sensors can be added to achieve
specific tasks. Figure 4 depicts the Boe-Bot Robot after all components are added.
Figure 4 Assembled Boe-Bot Robot with Sensors
This platform can be used for laboratories and projects. Table 2 depicts a list of exercises carried
out in the laboratory using the Boe-Bot Robot.
Table 2 Exercises Performed with the Boe-Bot Robot
Exercise Deliverables
Boe-Bot Servo Motors Assemble Boe-Bot, Center Servos, Servos control
Boe-Bot Navigation Forward, Back, Right, left and Stop, Speed control
Navigation with Touch Sensor Build whisker circuit, Control the Boe-Bot Motion using
whisker, decision based on sensor conditions
Navigation with IR Sensor Build IR circuit, Control the Boe-Bot Motion using
whisker, decision based on sensor conditions
Sensing Light Build Photo resistor circuit, Control the Boe-Bot Motion
using whisker, decision based on light conditions
Page 23.568.9

Course Projects
There were three projects assigned to the students. Two were individual projects and one was a
group project. In all projects there were a set of specifications given and the students were to
build and program the Boe-Bot to these specifications. There was then a competition and a
technical report submitted by the group and/or individual students.
In the first project, students were to design a simple robot to follow a trajectory which is shown
in Figure 5. When the robot reaches the end it will perform a victory dance and flash LED in a
specific pattern. Projects were evaluated based on accuracy, time taken to complete task, a final
dance routine and flashing LED at the end of each round.
Figure 5 Project 1 Trajectory
For the second project, students were to work on three different cases. The students were to work
on the project individually. Each case was assigned to three students. They would then compete
amongst themselves and each student was to write a technical project report. Figure 6 shows
some of the captured projects images. The groups and cases are as follows:
CASE 1: Design a Robot to move from Point A to B while avoiding obstacles in its path.
CASE 2: Design a Robot to move on top of a table without falling off (the table has black
tape around the edges).
CASE 3: Design a Robot that will follow the robot in front of it.
Figure 6 Projects: (a) Following robots in front (b) Move on top of a table without falling
Page 23.568.10

The third and final project was geared towards the annual IEEE SoutheastCon Hardware
competition. In this competition students from the southeastern region of the US compete to
determine which school will perform best on a set of requirements and rules given by the host
university. The objective of this year’s competition was to simulate the sorting of containers and
packages on a port. Different colored and sized boxes were to be picked up and sorted for
shipping either by rail, sea or air7. This was a group project. Each group was given a task related
to the hardware competition. The students had to use the Boe-Bot platform to demonstrate that
their project worked properly. Additional component, such as sensors, had to be provided to the
students for certain tasks. The group tasks were as follows:
Group 1: Use color sensor to determine the color of the blocks and their locations
Group 2: Devise a method to move and distinguish the blocks by size
Group 3: Determine robot location on the field and avoid obstacles
Group 4: Go up a ramp using a tilt sensor to compensate motion (of moving up the ramp)
while avoiding falling off
The module of the course dedicated to automation and Mechatronics were not presented in depth
due to time limitation. However, general concepts were discussed and students were exposure to
an industrial robot arm seen in Figure 7. Topics in this module included degree of freedom,
Kinematics, and CNC. The instructor demonstrated how the robot arm can be programmed to
perform repetitive tasks.
Interdisciplinary Integration
The engineering technology program at our institute comprises of electronic and construction
engineering technology. The goal is to develop this course with these innovations in mind. There
will be gradual introduction of building and construction into the course and its derivatives. In
construction related fields, building systems requirements in the future will be mandated by
codes and law to perform at an optimum efficiency to counter the effects of global warming on
the climate. The use of robotic responsive systems will play a major impact in the way building
equipment is planned, designed and operated. The educational requirements to educate
competent engineers and technologist will demand a new curriculum approach as well as
integrated teaching approaches.
The future engineers and technologist will have an educational experience that would expose the
nature of future applications in the areas of electro-mechanically-robotic building systems
(EMRBS), distributed energy resources, building envelopes and mechanical ventilation systems
able to detect chemical/biological/radiation (CBR) safety, facility performance evaluation, and
professional team building. Educational curriculum that integrates robotic program topics, if not
classes, will be essential in educating future electronic engineers and technologist to coexist and
excel in robotic design and application.
Page 23.568.11

Conclusions
The implementation of the robotics course for the Electronic Engineering Technology program
presented some challenges when designing an adequate course curriculum. It was necessary to
reconcile teaching material from different sources. After determining the course content, a
suitable hardware platform to implement the theory presented in class lectures was considered.
Time constraints limited the amount of material covered at the end of the course. There are plans
to modify this course to fit an interdisciplinary student body. Construction Engineering
Technology and Computer Sciences are the areas to be included in the future. The course was a
success as it relates to the students’ experience and knowledge gained. It served as a way for
students to integrate their knowledge. The passing rate was 100% for both course and laboratory.
An end of semester course evaluation and survey showed that the students found the course to be
very useful and would recommend the course to other students. The main observation from
students was the ability to integrate their knowledge of electronics into applicable robotics
projects. The projects were directly tied to the course theoretical lectures. Topics discussed
during lectures are implemented and reinforced via projects. This course was originally
implemented as a special topic. Due to the positive feedback from students and high demand,
efforts are on the way to create an official course which is in line with our continuous
improvement portion of the accreditation process. Improvements include providing the robotics
platforms for students instead of requiring students to purchase them; introducing pre-requisites
that facilitate teaching robotics course, and to have a follow-up course.
Bibliography
[1] Williams Geoff, “CNC Robotics, Build Your Own Workshop Bot,” McGraw Hill Companies, 2003.
[2] Kandray Daniel E., “Programmable Automation Technologies: An Introduction to CNC, Robotics and PLCs,”
Industrial Press, New York, 2010.
[3] Sahin Ferat and Kachroo Pushkin, “CNC Practical and Experimental Robotics,” CRC Press, 2008.
[4] Wise Edwin, “Robotics Demystified, A Self-Teaching Guide,” McGraw Hill Companies, 2005.
[5] Lindsay Andy, “Robotics with the Boe-Bot, Student Guide Version 3.0”, Parallax Inc., 2003.
[6] Lindsay Andy, “What’s a Microcontroller, Student Guide Version 2.2,” Parallax Inc., 2003.
[7] IEEE SoutheastCon 2013, Hardware Competition Rules, Version 1, March 18, 2012,
<http://ewh.ieee.org/reg/3/southeastcon2013/documents >
Page 23.568.12