
Exercise of mechanical vibration (Damped vibration) …Q1: Establish the equation of motion of each...
16
Q1: Establish the equation of motion of each system about x. Regarding (1), answer the critical damping coefficient and damping ratio. m m c x m ଵ ଶ Exercise of mechanical vibration (Damped vibration) c x (2) (3) (1) x ଵ ଶ Basic Q2: An inverted pendulum is supported by two springs as shown in the figure. Assume small angles of vibration and neglect the rod mass. Answer the following problems. a) Derive the equation of motion of the system about . b) What is the relation among ଵ , ଶ , , and for the characteristic roots to include at least one positive real value? c) Describe the behavior of the system when the characteristic roots include positive real values. ଶ ଵ ଵ Intermediate Q3: The top view of a door is shown in the figure. The door has a mass of 40 kg, 2.1 m height, 1.2 m width, and 0.05 m thickness. The door has a torsional spring and damper of coefficient ൌ13.6 Nm/rad and Nms/rad, respectively. Determine the critical value of when the damping ratio is ൌ1. Torsional spring and damper Basic Q4: Translate the following paragraph into Japanese. The free response of damped vibration system has equation Its characteristic roots are There are three cases depending on the sign of the expression under the square root. iሻ ଶ ൏ 4 (this will be underdamping, c is small relative to m and k) iiሻ ଶ 4 (this will be overdamping, c is large relative to m and k) iiiሻ ଶ ൌ 4 (this will be critical damping, c is just between over and under damping). ሷ ሶ ൌ 0. േ మ ସ ଶ .
Transcript of Exercise of mechanical vibration (Damped vibration) …Q1: Establish the equation of motion of each...

Q1: Establish the equation of motion of each system about x. Regarding (1), answer the critical damping coefficient and damping ratio.
m
mc
x
m𝑐 𝑐
Exercise of mechanical vibration (Damped vibration)
cx
(2) (3)
(1) x
𝑐 𝑐𝑘
Basic
Q2: An inverted pendulum is supported by two springs as shown in the figure. Assume small angles of vibration and neglect the rod mass. Answer the following problems.
a) Derive the equation of motion of the system about 𝜃.
b) What is the relation among 𝑙 , 𝑙 , 𝑚, and 𝑘 for the characteristic roots to include at least one positive real value?
c) Describe the behavior of the system when the characteristic roots include positive real values.
𝑚𝑘 𝑘𝑙𝑙 𝑙
𝜃
𝜃𝑔
Intermediate
Q3: The top view of a door is shown in the figure. The door has a mass of 40 kg, 2.1 m height, 1.2 m width, and 0.05 m thickness. The door has a torsional spring and damper of coefficient 𝑘 13.6 Nm/rad and 𝑐 Nms/rad, respectively. Determine the critical value of 𝑐 when the damping ratio is 𝜁 1.
𝜃𝑐𝑘Torsional springand damper
Basic
Q4: Translate the following paragraph into Japanese.
The free response of damped vibration system has equation
Its characteristic roots are
There are three cases depending on the sign of the expressionunder the square root.i 𝑐 4𝑚𝑘 (this will be underdamping, c is small relative to m
and k)ii 𝑐 4𝑚𝑘 (this will be overdamping, c is large relative to m andk)iii 𝑐 4𝑚𝑘 (this will be critical damping, c is just between overand under damping).
𝑚𝑥 𝑐𝑥 𝑘𝑥 0..

i) UnderdampingDamping force generates heat and dissipates energy. When thedamping constant is small, the system oscillates, but withdecreasing amplitude. Over time, it comes to rest at equilibrium.
ii) OverdampingWhen the damping is large the damping force is so great that thesystem cannot oscillate.
iii) Critical dampingAs in the overdamped case, this does not oscillate. For fixed m andk, choosing c to be the critical damping constant gives the fastestreturn of the system to its equilibrium position. In engineeringdesign, this is often a desirable property.
Q5: Highway crash barriers are designed to absorb a vehicle’s kineticenergy without bringing the vehicle to such an abrupt stop that theoccupants are injured. The barrier’s materials and thickness arechosen to accomplish this. It can be modeled as the spring‐mass‐damper system. For this application, t = 0 denotes the time ofcollision at x(0) = 0. The speed of the vehicle at this moment is𝑥 0 22 m/s. For a particular barrier, k = 18,000 N/m and c =20,000 N・s/m. Determine how long it takes to for the vehicle ofmass 1,800 kg to stop, and how far it compresses the barrier.
Basic
Q6: Obtain the response of the following equation of motion
for each of the following three cases:a) 𝑥 0 2, 𝑥 0 5;b) 𝑥 0 2, 𝑥 0 5;c) 𝑥 0 2, 𝑥 0 0.And, draw x(t) for the three cases using a graph drawing software such as MS Excel.
Basic
Q7: Consider a disk that rotates on the floor without slippage. Its centeris connected to walls by way of spring‐damper systems withoutfriction of which spring and damping coefficients are k and c,respectively. The disk’s radium and mass are r and m, respectively.(1) Obtain the equation of motion of the disk in terms of x.(2) When the system is critically damped, answer the following two
problems.(1) Solve the motion of the disk with initial conditions being𝑥 0 0 and 𝑥 0 𝑣 .(2) Find t’ at which the displacement of the disk becomes
greatest.(3) When the system is underdamped (ζ < 1), solve the response of
the system with the initial conditions being 𝑥 0 0 and𝑥 0 𝑣 .
Intermediate

(4) Find the logarithmic decrement (対数減衰率) δ, which is thelogarithmic ratio of two successive amplitudes.
𝛿 ln 𝑎𝑎x(t)
t
a1 a2 a3
r
Q8: Obtain the response of the following equation of motion
for the following case:𝑥 0 3, 𝑥 0 5.And, draw x(t) for the three cases using a graph drawing software such as MS Excel.
Basic
Q9: Translate the following paragraph about spring‐mass‐dampersystems.
Consider a spring‐mass‐damper system described by𝑚𝑥 𝑐𝑥 𝑘𝑥 0where m, k, and c are the mass, spring coefficient, and dampingcoefficient, respectively. This equation is rewritten as𝑥 2𝜁𝑝𝑥 𝑝 𝑥 0where 𝑝 𝑘/𝑚 and 𝜁 𝑐/2 𝑚𝑘. 𝜁 is a dimensionless valuecalled the damping ratio and defined by the ratio of c and thecritical damping coefficient. The characteristic roots are𝑠 𝜁𝑝 𝑖𝑝 1 𝜁 .Its imaginary part is the frequency of the oscillation. This frequencyis called the damped natural angular frequency and is smaller thanundamped natural frequency.
Rk
α
x
θ c
Q10: Consider a cylinder that rolls without slipping. Let x = 0 denote therest position of the cylinder. Neglect the mass of the spring anddamper. The mass moment of inertia of the cylinder is I.(1) Obtain the equation of motion in terms of x.(2) Determine the damped natural angular frequency of the
cylinder.
Basic

Q11: Derive the equation of motion for θ. When θ = 0, the spring is at itsnatural length. Assume that θ is small (small angle assumption).Mass of the lever is negligible. Gravitational acceleration is g.Answer the damped natural angular frequency.
m
l1
l2
l3
θ
c
k
Basic
Q12: Consider a lever system shown in the figure. Obtain its equation ofmotion in terms of x, and determine the damped natural angularfrequency. x = 0, when the lever is at its rest (statically equilibrium)position.
xma mb
ab
kc
Basic
Q13: A homogeneous stick of mass m and length L revolves around O.The stick is supported by a spring and two dampers. Gravityacceleration g acts on the stick.
(1) Answer the mass moment of inertial of the stick around O.
(2) Answer the damped natural angular frequency of the stick. You may use a small angle assumption.
θ
L/4
L/2
L
O
Intermediate
Q14: In the following system, the spring coefficient and mass are k=10000 N/m and m=20 kg, respectively. Find the critical damping coefficient.
テキスト P51‐2.9a
m
k
c
2k
Basic

Q15: 左端を支点として回転できる剛体棒の先端に質量の物体がついている。ばね定数 k ,粘性減衰係数 c .(1) 𝜃に関しての運動方程式を求めよ.(2) 臨界減衰係数を求めよ.
テキスト P51‐2.10a
m
l
l
l
Basic
Q16: Consider a pendulum supported by a spring‐damper system. A mass is attached at the end of a weightless rod. The rotation angle θ is zero at the equilibrium position. Let the gravity acceleration be g.(1) Answer the equation of motion about 𝜃.(2) Answer c such that the pendulum is critically damped (𝜃 is
small enough).
m
k
c
𝜃
𝑙𝑙
Basic
Q17: Consider an inverted pendulum supported by a rotational spring of constant k. The rotational spring produces the restoring torque proportional to the deflection angle. A mass of m is on the tip of the rod of length l. The rotational angle of the pendulum is denoted by θ, and θ = 0 when the pendulum stands straight. The spring is at its natural length when θ = θ0. The gravitational acceleration g acts on the mass. Answer the following problems. (1) Answer the mass moment of inertia of the pendulum about the
pivot.(2) Establish the equation of motion about θ.(3) Consider a case where θ0 = 0. The spring is at its natural length
when the pendulum stands straight.3‐1) Establish the equation of motion for a small angle (sinθ ~
θ).3‐2) Answer the characteristic root of the system.
大学院入試問題を解いてみよう! 2017年 名古屋大学 大学院入試問題
3‐3) Depending on the k value, the behavior of the system can be categorized into three cases. Describe all of them.
3‐4) In the case where the pendulum vibrates around θ = 0, answer the natural frequency.
(4) Consider a case where the pendulum is statically equivalent at 𝜃 . We discuss the behavior at 𝜃 .4‐1) Answer the equation of motion about θ.4‐2) Answer the natural frequency of the system.
mθ
kl

Q18: If applicable, compute ζ, ωn, and ωd for the following characteristic roots of 1‐d.o.f damped systems.(1) 𝜆 2 6𝑖(2) 𝜆 10(3) 𝜆 , (or 1 )
Basic
Q19: A hammer strikes a metal plate at the initial speed of v0. Thehammer mass is 𝑚 and the plate mass is 𝑚 . The metal plate issupported by the stiffness 𝑘 and damping 𝑐. Answer the expressionof the plate about x, of which equilibrium position is 𝑥 0. Do thisfor two values of the coefficient of restitution (1) e = 0 and (2) e = 1.Note, when e = 0, mp and mh moves as a mass of mp+mh. When e =1, mh rebounds after an extremely short contact period. Note that𝑐 2 𝑚 𝑘 and 𝑐 2 𝑚 𝑚 𝑘.
Intermediate
Q20: 下記(1)—(3)は,減衰のある1自由度振動系の運動方程式である.x is the displacement of the system. 固有方程式の根を基に,それぞれが過減衰系,不足減衰系,臨界減衰系のいずれであるかを判断せよ.
(1) 3𝑥 2𝑥 𝑥 0(2) 2𝑥 5𝑥 2𝑥 0(3) 𝑥 4𝑥 4𝑥 0
Basic
Q21: Consider a cart of mass m being supported by a spring of coefficient k and a damper of coefficient c. x is the displacement of the cart. At the equilibrium position, x = 0. The three curves in the figure depict the displacement of the cart after being released with the initial conditions being 𝑥 𝑡 0 𝑥 and 𝑥 𝑡 0 𝑣 . Answer the correct response of the system from X, Y, and Z when (1) 𝑐 2 𝑚𝑘(2) 𝑐 2 𝑚𝑘(3) 𝑐 2 𝑚𝑘.
0
x0
Time [s]
x: Cart d
isplacemen
t
X
YZ
Basic

Q22: 構造物に加えた力f とそのたわみxの比f/xを複素数を用いて表すと,微分を用いるよりも簡便となり,理解を促進することがある.下図の粘性抵抗のみからなる構造物を例とする.粘性抵抗の先端に力f を加え,そのたわみをxとする.構造物が静的平衡にあるとき,x = 0である.この系の運動方程式は𝑓 𝑐𝑥である.ここで,𝑥 𝐴sin𝜔𝑡 とすると,𝑓 𝑐𝐴𝜔cos𝜔𝑡𝑖𝑐𝜔𝑥となり,力とたわみの比は,𝑓𝑥 𝑖𝑐𝜔と表される.このとおり,粘性要素は,
𝑥 𝑡𝑓たわみの周波数𝜔に依存し,たわみより
も 𝜋/2 rad 位相が進んだ,たわみの速度に対した抗力を発生させる.
Basic
Answer the f/x ratios of the following systems using a complex unit.
𝑐𝑥 𝑡
𝑓 𝑘(1)
𝑐𝑥 𝑡𝑓 𝑘
(2)
𝑐𝑥 𝑡
𝑓𝑘(3)
𝑘𝑐𝑥 𝑡
𝑓 𝑘(4)
𝑘
Q23 Consider a lever system on a horizontal plane, for which we do not need to consider the effect of the gravity. As shown in the figure, two point masses are fixed on the lever, one of which end is fixed to a frictionless pin. The lever rotates around this pin, and its rotation angle is small enough such that sin𝜃~𝜃. At its static equilibrium position, 𝜃 0. Answer the following problems.(1) Find the mass moment of inertia of the lever with the two
masses about the pin.(2) Find the equation of motion of the system about 𝜃. Use I as the
mass moment of inertia of the system.(3) Solve the equation acquired in (2) about 𝜃 with the initial
conditions 𝜃 0 𝜃 and 𝜃 0 0 when the system is underdamped.
Basic
mm
c

Q24 The behaviors of 1‐DOF systems can be understood from their characteristic roots. Complete the following roots locus by finding the correct combinations of the loci of roots (い—ほ) and the motions of 1‐DOF spring‐mass‐damper systems (A—E).
Im
Re
い
は
ほに
ろ
Roots locus of 1‐DOF spring‐mass‐damper systems
Basic
Motions (displacement) after being released from rest
Time
(A)
(C)
(B)
(D)
(E)
Time
Time
Displacemen
t
Displacemen
t
Q25 Consider a cart system with Coulomb’s friction. It is supported by a spring of coefficient k. The position of the cart is denoted by x and its origin is the equilibrium position of the system with no friction. Answer the following problems.(1) Find the equation of motion of the system when the friction
force is given by 𝑓 𝑥 0𝑓 𝑥 0 .(2) Solve the above equation about x at 𝑡 0, with initial
position 𝑥 0 0 and velocity 𝑥 0 𝑣 0 .(3) Find the maximum position of the cart at 𝑡 0, .
Intermediate
m
k
𝑥 𝑡Q25 (Figure)

Q26 When the equation of motion of 1‐d.o.f vibration system is given asbelow, answer the following problems.𝑥 4𝑥 2𝑥 0(1) Choose one among い, ろ, and は, to express the nature of the
system.い: Overdampedろ: Critically dampedは: Underdamped
(2) Find the solution of 𝑥 with the initial conditions being 𝑥 0 1,𝑥 0 0.
Basic
Q27 Consider a 1‐dof spring‐mass‐damper system in the figure. Themass is supported by two springs, a beam, and dashpot. The massmoves only horizontally and its displacement is small. The length,Young’s modulus, and second moment of are L, E, and I,respectively. Answer the following problems.
大学院入試問題を解いてみよう! 2019年 東北大学 大学院入試問題
(1) Find the equivalent spring coefficient of the beam: 𝑘 .(2) Find the collective spring coefficient of the entire system, K using𝑘 .(3) Find the critical damping coefficient of the system, Cc, using K.(4) When the system is underdamped, find the period of damped
natural vibration T.(5) Find the ratio of vibratory amplitudes at two time points: 𝑥 𝑡𝑇 to 𝑥 𝑡 .
COLUMN: 戦略的学習
戦略的学習とは,良い成績(AもしくはB)で単位を取得していくための
効率的な学習のことです.例えば,過去の試験問題を中心に勉強したり,この演習問題を解くときも,解法やその手順そのものを記憶することに努めたりする学習法です.戦略的学習の問題は,なぜそのような解法/原理になるのかを真に理解しようとする姿勢(すなわち成
長の機会)を失ってしまうことです.工学者もしくは技術者として新しい問題に面したとき,皆さんを後押ししてくれるのは原理の深い理解です.

𝑚𝑥 𝑐 𝑐 𝑥 𝑘𝑥 0𝑐 2 𝑚𝑘𝑝 𝑘𝑚𝜁 𝑐 𝑐2 𝑚𝑘𝑚𝑥 𝐶 𝐶𝐶 𝐶 𝑥 0
AnswerQ1(1) 𝑚𝑥 2𝑐𝑥 0(2)
(3)
Q2 𝑚𝑙 𝜃 2𝑘𝑙 𝑚𝑔𝑙 𝜃 0a) 2𝑘𝑙 𝑚𝑔𝑙 0b)c) The pendulum falls down or does not remain around 𝜃 0.The general solution is 𝜃 𝐴 exp 𝜆 𝑡 𝐴 exp 𝜆 𝑡.If 𝜆 or 𝜆 includes a positive real value, 𝜃 diverges over time.
Q3 𝜌 401.2 0.05 2003𝐼 𝜌 𝑟 𝑑𝑥𝑑𝑦. 19.23 kgm.
𝐼 𝜃 𝑐 𝜃 𝑘𝜃 0ζ 1 𝑐2 𝑀𝐾Equation of Motion
𝑐 2 𝐼𝑘 32.3 Nms/rad
Q4: Translate the following paragraph into Japanese.
減衰振動系の自由応答は,下記の式で表現される:
この特性方程式の根は,
ルートの中の符号によって,3つの場合がある.i 𝑐 4𝑚𝑘 (これは不足減衰であり,c は m と k に比べて小さい)ii 𝑐 4𝑚𝑘 (これは過減衰であり,c は m と k に比べて大きい)iii 𝑐 4𝑚𝑘 (これは臨界減衰であり,c は不足減衰と過減衰の調度間である).
𝑚𝑥 𝑐𝑥 𝑘𝑥 0..
i) 不足減衰
減衰力は熱を発生させ,エネルギーを散逸させる.減衰係数が小さいとき,システムは振動するが,その振幅は減少していく.時間が経つと,平衡状態で静止する.
ii) 過減衰
減衰が大きい時,減衰力は大きくなり,システムは振動できない.
iii) 臨界減衰
過減衰の場合と同様に,これは振動しない.m と k が固定されているとき, c を臨界減衰係数となるように選択すると,システムは最も早く,平衡位置に戻る.工業デザインでは,これはしばしば望ましい性質である.

Q5 1800𝑥 20000𝑥 18000𝑥 0By solving the characteristic roots of the above equation of motion1800𝑠 20000𝑠 18000 0𝑠 0.99𝑠 10.12𝑥 𝑡 𝐴𝑒 𝐵𝑒 𝑥 0 𝐴 𝐵 0𝑥 0 𝐴𝑠 𝐵𝑠 22𝑥 𝑡 2.41 𝑒 . 𝑒 .
𝑥 𝑡 2.41 0.99𝑒 . 10.12𝑒 . 0When the car stops 𝑥 𝑡 0. 𝑡 0.254 s𝑥 𝑡 0.254 2.41 𝑒 . 𝑒 . 1.69 m
𝐴 133 , 𝐴 73 𝐴 1, 𝐴 1𝐴 83 , 𝐴 23
(a) (b)
(c)
Q6𝑥 𝑡 𝐴 𝑒 𝐴 𝑒
0
1
2
3
0 1 2 3 4 5
x(t)
t
a
b c
Q7
(1) 32 𝑚𝑥 𝑐𝑥 2𝑘𝑥 0(2‐1)𝑥 𝑣 𝑡exp 𝑐3𝑚 𝑡 (2‐2)𝑡′ 1𝜔(3) 𝑥 𝑣𝜔 1 𝜁 exp 𝜔 𝜁𝑡 sin 𝜔 1 𝜁 𝑡 𝜔 2 𝑘3𝑚(4) 𝛿 2𝜋𝜁1 𝜁
𝜁 𝑐2 3𝑚𝑘𝑥 𝑣 𝑡exp 2 𝑘3𝑚 𝑡
or
Q8 𝑥 𝑡 𝐴 𝑡𝐴 𝑒 𝐴 3, 𝐴 11
0
1
2
3
4
0 1 2 3 4 5
x(t)
t

Q9: Translate the following paragraph about spring‐mass‐dampersystems.
次の式で表されるばね‐マス‐ダンパ系を考える.𝑚𝑥 𝑐𝑥 𝑘𝑥 0.ここで, m, k, および c はそれぞれ,質量,ばね係数,減衰係数である.この式は𝑥 2𝜁𝑝𝑥 𝑝 𝑥 0と書き換えられ,𝑝 𝑘/𝑚 および 𝜁 𝑐/2 𝑚𝑘 である.𝜁 は減衰比と呼ばれる無次元量であり,c と臨界減衰係数の比で定義される.特性方程式の根は𝑠 𝜁𝑝 𝑖𝑝 1 𝜁である.この虚数部が振動の周波数である.この周波数は,減衰固有角周波数と呼ばれ,減衰の無い固有周波数よりも小さくなる.
(1)
(2)
𝑚 𝑥 𝑐𝑥 𝑘𝑥 0𝑝
Q10
𝜔 𝑝 1 𝜁 𝜁 𝑐2 𝑚 𝐼𝑅 𝑘
Q11: Derive the equation of motion for θ. When θ = 0, the spring is atits natural length. Assume that θ is small. Mass of the lever isnegligible. Gravitational acceleration is g. Answer the dampednatural angular frequency.
m
l1
l2
l3
θ
c
k
𝜔 𝑝 1 𝜁𝑝 𝑚𝑔𝑙 𝑘𝑙𝑚𝑙𝜁 𝑐𝑙2 𝑚𝑙 𝑚𝑔𝑙 𝑘𝑙
𝑚𝑙 𝜃 𝑐𝑙 𝜃 𝑚𝑔𝑙 𝑘𝑙 𝜃 0
Q12: Consider a lever system shown in the figure. Obtain its equationof motion in terms of x, and determine the damped naturalangular frequency. x = 0, when the lever is at its rest (staticallyequilibrium) position.
xma mb
ab
kc
𝑚 𝑚 𝑏𝑎 𝑥 𝑐𝑥 𝑘 𝑏𝑎 𝑥 0 𝜔 𝑝 1 𝜁 𝑝 𝐾𝑀 𝜁 𝑐2 𝑀𝐾𝑀 𝑚 𝑚 𝑏𝑎 𝐾 𝑘 𝑏𝑎
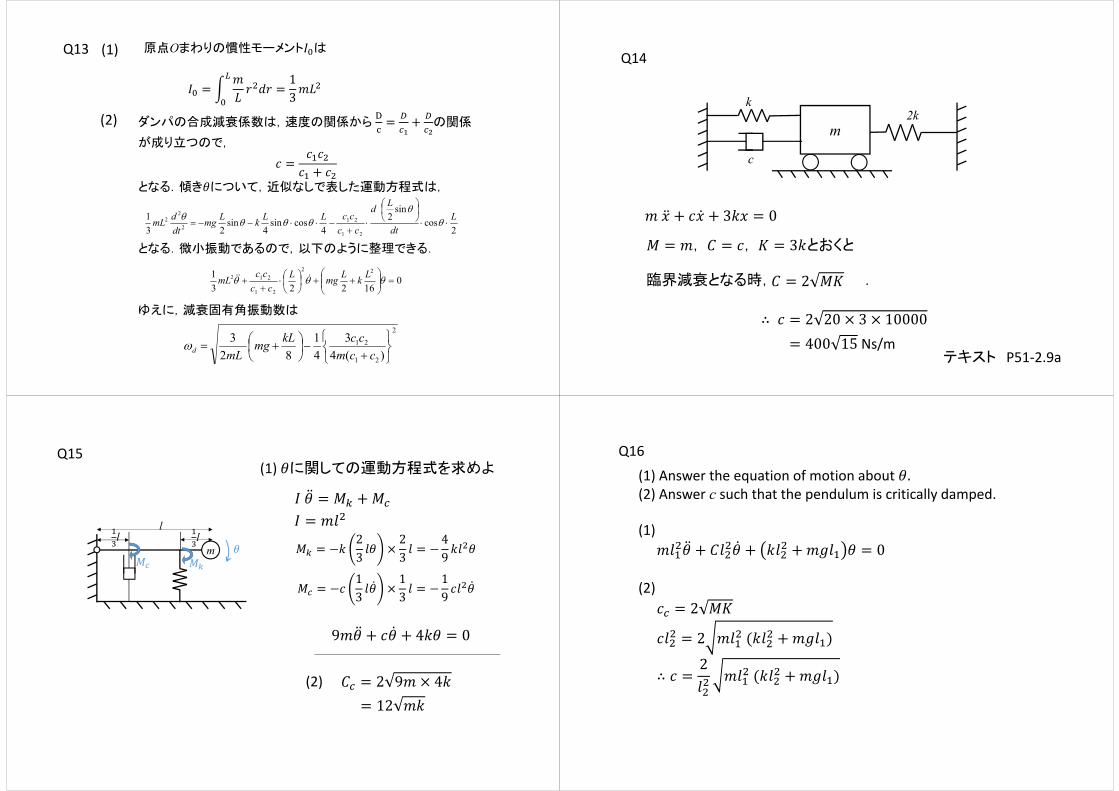
ダンパの合成減衰係数は,速度の関係から の関係
が成り立つので, 𝑐 𝑐 𝑐𝑐 𝑐となる.傾き𝜃について,近似なしで表した運動方程式は,
となる.微小振動であるので,以下のように整理できる.
ゆえに,減衰固有角振動数は
(1) 原点Oまわりの慣性モーメント𝐼 は
𝐼 𝑚𝐿 𝑟 𝑑𝑟 13 𝑚𝐿(2)
016223
1 22
21
212
LkLmgL
ccccmL
Q13
2cos
sin2
4cossin
4sin
231
21
212
22 L
dt
Ld
ccccLLkLmg
dtdmL
2
21
21
)(43
41
823
ccmcckLmg
mLd
Q14
テキスト P51‐2.9a
m
k
c
2k
𝐶 2 𝑀𝐾∴ 𝑐 2 20 3 10000400 15 Ns/m
𝑚 𝑥 𝑐𝑥 3𝑘𝑥 0 𝑀 𝑚, 𝐶 𝑐, 𝐾 3𝑘とおくと
臨界減衰となる時, .
Q15
ml
ll
(1) 𝜃に関しての運動方程式を求めよ
(2)
𝐼 𝑚𝑙𝐼 𝜃 𝑀 𝑀 𝜃𝑀𝑀 𝑀 𝑘 23 𝑙𝜃 23 𝑙 49 𝑘𝑙 𝜃
𝑀 𝑐 13 𝑙𝜃 13 𝑙 19 𝑐𝑙 𝜃9𝑚𝜃 𝑐𝜃 4𝑘𝜃 0
𝐶 2 9𝑚 4𝑘12 𝑚𝑘
Q16(1) Answer the equation of motion about 𝜃.(2) Answer c such that the pendulum is critically damped.
(1)𝑚𝑙 𝜃 𝐶𝑙 𝜃 𝑘𝑙 𝑚𝑔𝑙 𝜃 0(2)𝑐 2 𝑀𝐾𝑐𝑙 2 𝑚𝑙 𝑘𝑙 𝑚𝑔𝑙∴ 𝑐 2𝑙 𝑚𝑙 𝑘𝑙 𝑚𝑔𝑙

Q17.(1) 𝐼 𝑚𝑙 (2) 𝐼𝜃 𝑘 𝜃 𝜃 𝑚𝑔𝑙sin𝜃(3‐1)𝐼𝜃 𝑘𝜃 𝑚𝑔𝑙𝜃 (3‐2) 𝜆 𝑚𝑔𝑙 𝑘𝑚𝑙(3‐3)
Case 1: 𝑚𝑔𝑙 𝑘 0特性方程式の根が正の実部を有し,虚部を有さないので,解は発散する.すなわち,ばね定数が小さく,振子を支えることができないので,振子が転倒する.
Case 2: k = mgl特性方程式の根が0になるので,角度は変化しない.つまり,振子は真上を向いたまま静止する.
Case 3: 𝑚𝑔𝑙 𝑘 0特性方程式の根が虚部のみになるので,θ = 0 を中心に振動する.ばね定数が重力に対して十分に大きい.
(3‐4)
𝜔 𝑘 𝑚𝑔𝑙𝐼 ただし,k – mgl > 0
(4‐1)𝐼𝜃 𝑘 𝜃 𝜋2 0 重力の影響を考慮しなくても良い条件である.
𝜔 𝑘𝐼(4‐2)
Q18.Hint: Use 𝜆 𝜔 𝜁 𝜔 𝜁 1 when 𝜁 1𝜆 𝜔 𝜁 𝑖𝜔 1 𝜁 when 𝜁 1(1) 𝜁 , 𝜔 2 10, 𝜔 6(2) 𝜔 10, 𝜁 1(3) 𝜁 , 𝜔
Q19.システムは不足減衰(𝑐 2 𝑚𝑘)であるので,一般解は𝑥 𝑡 A𝑒 cos 𝑝 𝑡 𝜙となる.
(1) e = 1 の場合
衝突前後の運動量が保存され,反発係数の条件も満たされることから,ハンマと板の衝突前の速度をそれぞれ,vh, vp とし,衝突後はv’h, v’p とすると,1 𝑣 𝑣′𝑣 𝑣および 𝑣 𝑚 𝑣 𝑚 𝑣′ 𝑚 𝑣′ 𝑚が満たされなければならない.𝑣 0かつ𝑣 𝑣 であるので,これらを満たす解とし
て, 𝑣′ 2𝑣 𝑚𝑚 𝑚𝑣′ 𝑣 𝑚 𝑚𝑚 𝑚が得られる.

Q19初期変位は 𝑥 0である.したがって,金属板の応答は下記のようになる:𝑥 𝑡 2𝑣 𝑚𝑚 𝑚 𝑝 𝑒 sin 𝑝 𝑡
𝑝 𝑘𝑚 , 𝜁 𝑐2 𝑚 𝑘 , 𝑝 𝑝 1 𝜁(2) e = 0 の場合
ハンマと金属板は衝突後には一体となって振動する.ハンマの衝突前後で運動量が保存されなければならないので,金属板とハンマの衝突直後の速度をvとすると, 𝑚 𝑣 𝑣 𝑚 𝑚が成立する.衝突後は(1)と同様に自由振動になるため,金属板の応答は下記のようになる:𝑥 𝑡 𝑚 𝑣𝑚 𝑚 𝑝 𝑒 sin 𝑝 𝑡𝑝 , 𝜁 , 𝑝 𝑝 1 𝜁 g
Q20(1) 不足減衰系(2) 過減衰系(3) 臨界減衰系
Q211) Z. 最も早く平衡点に収束するのが,臨界減衰の特徴である.2) X. この3条件の中で,振動が生じるのはこの不足減衰のみであ
る.3) Y. 粘性が大きく,収束に時間を要するのが過減衰である.
(1)
Q22 𝑓𝑥 𝑘 𝑖𝜔𝑐(2) 𝑓𝑥 1𝑘 1𝑖𝜔𝑐 𝑖𝑘𝑐𝜔𝑘 𝑖𝑐𝜔(3) 𝑓𝑥 1𝑘 1𝑘 𝑖𝜔𝑐(4) 𝑓𝑥 𝑘 1𝑘 1𝑖𝜔𝑐
(2)の直列接続は,振動の周波数
が小さいときは,柔らかく(抵抗が小さい),周波数が大きくなるにつれて,本来のばねの剛性が機能するという特性を有する.
𝜔
𝜙𝑓/𝑥𝑘0
0
𝜋2
Q23(1) 𝐼 𝑚𝑟 𝑚 2𝑟 5𝑚𝑟(2) 𝐼𝜃 4𝑐𝑟 𝜃 4𝑘𝑟 𝜃 0(3)
𝜃 𝑡 exp 𝜔 𝜁𝑡 𝐴 cos𝜔 𝑡 𝐴 sin𝜔 𝑡運動方程式の一般解は下記の通りであり,未定数A1, A2は初期条件から決定される.
𝜃 0 𝐴 𝜃𝜃 0 𝐴 𝜔 𝜁 𝐴 𝜔 0𝜔 4𝑘𝑟𝐼𝜁 𝑐𝑟𝐼𝑘𝜔 𝜔 1 𝜁𝐴 𝜃 , 𝐴

Im
Re
A
B
CD
E
Roots locus of 1‐DOF spring‐mass‐damper systems
Motions (displacement) after being released from rest
Time
(A)
(C)
(B)
(D)
(E)
Q24 The behaviors of 1‐DOF systems can be understood from their characteristic roots. Complete the following roots locus by finding the correct combinations of the loci of roots (い—ほ) and the motions of 1‐DOF spring‐mass‐damper systems (A—E). (4 pt).
Q25(1) 𝑚𝑥 𝑘𝑥 𝑓 (𝑥 0)𝑚𝑥 𝑘𝑥 𝑓 (𝑥 0)(2) 𝑥 𝑡 𝑣𝜔 sin𝜔 𝑡 𝑓𝑘 cos𝜔 𝑡 𝑓𝑘 𝜔 𝑘𝑚(3)
(2)の式を変形し,𝑥 𝑡 𝑣𝜔 𝑓𝑘 sin 𝜔 𝑡 𝜙 𝑓𝑘を得ると,x(t)の最大値は,下記となることが分かる.𝑥 𝑡 𝑣𝜔 𝑓𝑘 𝑓𝑘
Q26(1) い: Overdamped
(2)
𝑥 2 12 exp 2 2 𝑡 2 12 exp 2 2 𝑡
𝑥 𝐴 exp 2 2 𝑡 𝐴 exp 2 2 𝑡𝑥 0 𝐴 𝐴 1𝑥 0 𝐴 2 2 𝐴 2 2 0General solution:
Q27(1) 𝑘 3𝐸𝐼𝐿(2) 𝐾 𝑘 𝑘𝑘 𝑘 𝑘(3) 𝐶 2 𝑚𝐾(4) 𝑇 2𝜋𝑝 2𝜋𝑝 1 𝜁𝑝 𝑚𝐾 𝜁 𝑐2 𝑚𝐾
(5) 𝑥 𝑡 𝑎𝑒 cos 𝑝 𝑡 𝜙として,𝑥 𝑡 𝑇𝑥 𝑡 exp 𝑐2𝑚 𝑇
exp 𝑐2𝑚 2𝜋𝑝 1 𝜁exp 2𝜋𝑐4𝑚𝑘 𝑐


















