Exercise 14 Mars Rover Planning - University of Colorado...
7
Exercise 14 – Mars Rover Planning Due: Thursday, March 12 at the start of class • HiRISE DEM and Hillshade: galemosaic and GaleHS GRID files • CTX image covering the traverse route: B01_009861_1753_XI_04S222W.jp2 • Non-georeferenced image of the rover location on Sol 1487 (Oct. 12, 2016) Curiosity_Location_Sol1487-full.jpg Goal: The lower slopes of Mt. Sharp (photo below) present the biggest challenge for rover-driving to date on Mars. Choosing a route must factor in the capability of the rover plus the expected science targets. You will start with the engineering constraints and determine a route that have slopes that the rover can manage. You will later factor in both surface materials (e.g., sand vs. rock). The image above is a portion of a larger image taken by Curiosity's 100-millimeter Mast Camera on Aug. 23, 2012. The dark rock highlighted in the box is approximately the same size as Curiosity. The pointy mound in the center of the image, looming above the rover-sized rock, is about 300 m across and 100 m high. http://photojournal.jpl.nasa.gov/catalog/PIA16105 Part II. Engineering constraints (nothing to turn in here) Curiosity is a very capable rover, but there are limitations to where it can drive. The kinds of slopes that it can drive up and down depend on the material – on bare rock, the rover can traverse much steeper slopes than it can in sand. Below, and on the next page, you’ll see several slides detailing the driving limitations.
Transcript of Exercise 14 Mars Rover Planning - University of Colorado...

Exercise 14 – Mars Rover Planning
Due: Thursday, March 12 at the start of class
• HiRISE DEM and Hillshade: galemosaic and GaleHS GRID files
• CTX image covering the traverse route: B01_009861_1753_XI_04S222W.jp2
• Non-georeferenced image of the rover location on Sol 1487 (Oct. 12, 2016)
Curiosity_Location_Sol1487-full.jpg
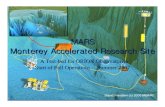
Goal: The lower slopes of Mt. Sharp (photo below) present the biggest challenge for rover-driving to date
on Mars. Choosing a route must factor in the capability of the rover plus the expected science targets. You
will start with the engineering constraints and determine a route that have slopes that the rover can
manage. You will later factor in both surface materials (e.g., sand vs. rock).
The image above is a portion of a larger image taken by Curiosity's 100-millimeter Mast Camera on Aug. 23, 2012.
The dark rock highlighted in the box is approximately the same size as Curiosity. The pointy mound in the center of
the image, looming above the rover-sized rock, is about 300 m across and 100 m high.
http://photojournal.jpl.nasa.gov/catalog/PIA16105
Part II. Engineering constraints (nothing to turn in here) Curiosity is a very capable rover, but there are limitations to where it can drive. The kinds of slopes that it
can drive up and down depend on the material – on bare rock, the rover can traverse much steeper slopes
than it can in sand. Below, and on the next page, you’ll see several slides detailing the driving limitations.

These were presented at the 5th Mars Science Laboratory Landing Site Workshop in 2011 by Dr. Matthew
Golombek (JPL) and his colleagues.
Get familiar with rocky and sandy areas to help you plan your traverse in Part III. See the images below.

Black arrows in this DEM indicate sand dunes; red arrows indicate rock outcrops

Black arrows in this HiRISE image indicate sand dunes; red arrows indicate rock outcrops
Part II. Georeferencing an image 1. Add the HiRISE DEM and then the CTX image to an empty ArcMap project. For the CTX, to
get rid of the black space around the image go into Symbology and check the Display
Background Value 0 as no color box.
2. I downloaded a jpg of the rover location (Curiosity_Location_Sol1487-full.jpg). The problem is
that this image has no geographic information. That’s ok, we can use Georeferencing Tools to
properly place it on the map.
3. Add and dock the Georeferencing toolbar if it is not visible by right-clicking on the empty menu
bar.
4. Add your Curiosity_Location jpg to your base map if you haven’t already. You’ll get a warning
dialog box that the file has no spatial reference. That’s OK, because you’re going to add one by
georeferencing the file.
5. In the Georeferencing Toolbar, **make sure
that the target layer in the pulldown is your
traverse jpeg, and select Fit to Display from
the Georeferencing pulldown menu. Your
traverse jpeg will now fit inside the ArcMap
window.
6. The basic idea for georeferencing is that you are
going to find points on the traverse map that
match points on the HiRISE image. You’ll tell
ArcMap to match those points. Once everything
matches as well as possible, you will tell
ArcMap to write the files that contain the
georeferencing information.

7. From the Georeferencing toolbar, we will Add Control Points (the icon with the two Xs connected with a line). Also, click the View Link Table icon and leave it open.
a. Locate a point that you can see precisely in both the traverse jpeg and your CTX base image. Center the cursor cross exactly on the spot in the Curiosity Location jpeg. Click once. Then locate the same point in the CTX base image and click a second time. The control point will appear in your link table.
b. If you blunder and enter a bad point, go to the table, highlight the offending row, and Delete. If the image disappears, go to the TOC, and right click > Zoom to layer.
c. You will need to
choose several other
control points, and it is
best to spread them out.
You definitely do not
want them to be co-
linear. If things become
screwy, just delete
control points until you get rid of the bad ones.
d. This image georeferences quite nicely, so you should be able to do a good job with about 5 widely spaced control points.
e. Once you are happy with your results, go to the Georeferencing pulldown menu, and select Update Georeferencing. This process adds a World File to the jpeg (it’s one of those auxiliary files that shows up when you look at files such as this in Windows Explorer). As long as this world file stays with the jpeg, the image will be georeferenced, and ArcMap will know where to put it on any map of Mars. Add this georeferenced image to the map if it doesn’t
happen automatically
Part III. Developing slope maps If we make a slope map for the landing area and the lower slopes of Mt. Sharp, we can determine the
slopes that the rover can and cannot drive up or down. This is a critical component of traverse-planning
(although not the only component – the nature of surface materials and potential science targets are also
critical factors!).
A. Make a slope map
1. Make a slope map from your DEM in degrees. Be patient – this is a big DEM, and it might take a bit of time to run (few minutes).
B. Symbolize your slope map
1. Once you’ve symbolized the general data layer, make two more classified layers that show a useful depiction of the following, using the engineering inputs from above:a. A Driveable-Getting risky-Not driveable layer for the rover on sand
b. A Driveable-Getting risky-Not driveable layer for the rover on bare rock
*Use green for driveable, yellow for getting risky (close to not driveable), and red for not
driveable.
Part IV. Plotting a traverse route
1. Look at the map below. Your job is to create a line representing the safest path from the current
location (green dot here, but you can find it on your georeferenced jpg) to the target area (red
box) using the slope maps that you have created. Create your line by making an empty shapefile
and then editing it, like we did when we made polygons in the Bolivia Flood exercise. OR you
can turn on the drawing tools and create a line. When you’re done you can Covert Graphics to
Features and that will create a shapefile.

The final products
Create an ArcMap layout that showcases your safe traverse for Curiosity from its current location to the
target area. Include 2 dataframes with your rover traverse plotted on each – one with a slope map
containing a classified color scheme showing Driveable-Getting risky-Not driveable on sand and one next
to it showing Driveable-Getting risky-Not driveable on rock. Be sure that your maps are cartographically
complete and includes all components of a proper map layout.
Export your two-panel map as a jpeg with a resolution of 150-200 pixels per inch at finished size (e.g., if
the width is 11 inches, you need 11X150 or 1650 pixels in the width box).

Questions to hand in (make sure you include all parts):
1) Describe why you chose the traverse that you did from the rover’s location to the target area (one
thorough paragraph). Justify why this is a safe traverse plan for the rover, discussing the slopes and
amount of sand and rock the rover will be driving across given your assessment of the images, hillshade,
and slope maps.
2) How long do you expect your traverse to take in sols (Mars days)? Use the maximum driving distance
per day (sol) of the rover from the jpg map you georeferenced. Show your work.
3) Your qualitative discussions of a safe route will only be somewhat convincing to the engineers driving
the 2.5 billion dollar rover. They will want a more quantitative assessment! The best way to convince them
that your traverse options are safe would be to create a10-m-wide path around your traverse line and then
assess the slopes within that area. So crack to it! What is the min, mean, maximum and standard deviation
along the rover traverse, including within the 5 m on each side of your line? Report these values in a table.
Write an explanation of the work flow you used to determine these values. Finally, discuss the safety of
your traverse in light of this new buffered data.

















{kind=link}