
Evaluation of the autoparametric pendulum vibration...
15
Shock and Vibration 15 (2008) 355–368 355 IOS Press Evaluation of the autoparametric pendulum vibration absorber for a Duffing system Benjamın Vazquez-Gonzalez a,∗ and Gerardo Silva-Navarro b a Universidad Autonoma Metropolitana, Plantel Azcapotzalco, Departamento de Energia, Av. San Pablo No. 180, Col. Reynosa Tamaulipas, C.P. 02200 Mexico, D.F. Mexico b Centro de Investigacion y de Estudios Avanzados del I. P. N., Departamento de Ingenieria Electrica, Seccion de Mecatronica, A.P. 14-740, C.P. 07360 Mexico, D.F. Mexico Received 2007 Revised 2007 Abstract. In this work we study the frequency and dynamic response of a damped Duffing system attached to a parametrically excited pendulum vibration absorber. The multiple scales method is applied to get the autoparametric resonance conditions and the results are compared with a similar application of a pendulum absorber for a linear primary system. The approximate frequency analysis reveals that the nonlinear dynamics of the externally excited system are suppressed by the pendulum absorber and, under this condition, the primary Duffing system yields a time response almost equivalent to that obtained for a linear primary system, although the absorber frequency response is drastically modified and affected by the cubic stiffness, thus modifying the jumps defined by the fixed points. In the absorber frequency response can be appreciated a good absorption capability for certain ranges of nonlinear stiffness and the internal coupling is maintained by the existing damping between the pendulum and the primary system. Moreover, the stability of the coupled system is also affected by some extra fixed points introduced by the cubic stiffness, which is illustrated with several amplitude-force responses. Some numerical simulations of the approximate frequency responses and dynamic behavior are performed to show the steady-state and transient responses. Keywords: Autoparametric systems, Duffing system, nonlinear frequency analysis, pendulum-type absorber 1. Introduction Dynamic vibration absorbers are now classical devices, consisting of masses, springs and possibly dampers, which are configured and attached to a vibrating primary system to attenuate its undesirable forced dynamic response. The physical phenomenon governing the vibration attenuation involves the energy transfer from the primary system to the vibration absorbers. In most industrial applications, dynamic vibration absorbers have to interact with nonlinear mechanical systems, situation which certainly complicates the dynamic and frequency analysis. In fact, in some applications, a nonlinear vibration absorber may offer advantages, with respect to its linear counterpart, such as increased effective bandwidth and reduced resonant response. In Korenev and Reznikov [1], Sun et al. [2] and Harris [3] are presented collections of many vibration absorbers and their practical industrial applications. Autoparametric systems are interesting vibrating systems, which consist of at least two nonlinearly coupled subsystems. The primary system can be externally excited by some harmonic force and, when it is connected to a secondary system (absorber) can be satisfied the so-called parametric excitation, that is, a mechanism that transfers the exogenous energy to the secondary system. In case the primary system is excited exactly or near its linear resonant frequency then, it is possible to get the principal parametric resonance for the secondary system (autoparametric ∗ Corresponding author. E-mail: [email protected]. ISSN 1070-9622/08/$17.00 2008 – IOS Press and the authors. All rights reserved
Transcript of Evaluation of the autoparametric pendulum vibration...

Shock and Vibration 15 (2008) 355–368 355IOS Press
Evaluation of the autoparametric pendulumvibration absorber for a Duffing system
Benjamın Vazquez-Gonzaleza,∗ and Gerardo Silva-Navarrob
aUniversidad Autonoma Metropolitana, Plantel Azcapotzalco, Departamento de Energia, Av. San Pablo No. 180,Col. Reynosa Tamaulipas, C.P. 02200 Mexico, D.F. MexicobCentro de Investigacion y de Estudios Avanzados del I. P. N., Departamento de Ingenieria Electrica, Seccion deMecatronica, A.P. 14-740, C.P. 07360 Mexico, D.F. Mexico
Received 2007
Revised 2007
Abstract. In this work we study the frequency and dynamic response of a damped Duffing system attached to a parametricallyexcited pendulum vibration absorber. The multiple scales method is applied to get the autoparametric resonance conditionsand the results are compared with a similar application of a pendulum absorber for a linear primary system. The approximatefrequency analysis reveals that the nonlinear dynamics of the externally excited system are suppressed by the pendulum absorberand, under this condition, the primary Duffing system yields a time response almost equivalent to that obtained for a linear primarysystem, although the absorber frequency response is drastically modified and affected by the cubic stiffness, thus modifying thejumps defined by the fixed points. In the absorber frequency response can be appreciated a good absorption capability for certainranges of nonlinear stiffness and the internal coupling is maintained by the existing damping between the pendulum and theprimary system. Moreover, the stability of the coupled system is also affected by some extra fixed points introduced by the cubicstiffness, which is illustrated with several amplitude-force responses. Some numerical simulations of the approximate frequencyresponses and dynamic behavior are performed to show the steady-state and transient responses.
Keywords: Autoparametric systems, Duffing system, nonlinear frequency analysis, pendulum-type absorber
1. Introduction
Dynamic vibration absorbers are now classical devices, consisting of masses, springs and possibly dampers, whichare configured and attached to a vibrating primary system to attenuate its undesirable forced dynamic response. Thephysical phenomenon governing the vibration attenuation involves the energy transfer from the primary system tothe vibration absorbers. In most industrial applications, dynamic vibration absorbers have to interact with nonlinearmechanical systems, situation which certainly complicates the dynamic and frequency analysis. In fact, in someapplications, a nonlinear vibration absorber may offer advantages, with respect to its linear counterpart, such asincreased effective bandwidth and reduced resonant response. In Korenev and Reznikov [1], Sun et al. [2] andHarris [3] are presented collections of many vibration absorbers and their practical industrial applications.
Autoparametric systems are interesting vibrating systems, which consist of at least two nonlinearly coupledsubsystems. The primary system can be externally excited by some harmonic force and, when it is connected to asecondary system (absorber) can be satisfied the so-called parametric excitation, that is, a mechanism that transfersthe exogenous energy to the secondary system. In case the primary system is excited exactly or near its linear resonantfrequency then, it is possible to get the principal parametric resonance for the secondary system (autoparametric
∗Corresponding author. E-mail: [email protected].
ISSN 1070-9622/08/$17.00 2008 – IOS Press and the authors. All rights reserved

356 B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system
interaction), attenuating the response of the primary system. See, e.g., Cartmell [4], Tondl et al. [5], Nayfeh andMook [6] and references therein.
The autoparametric interaction between two mechanical systems can be encountered in many vibrating structuresand machinery. This phenomenon has been widely discussed in the literature, since the work by Haxton and Barr [7].Some pendulum-type absorbers have been applied for vibration protection on tower-pipes, chimneys, civil structures(buildings and bridges) affected by wind-induced and seismic vibrations, etc. (Korenev and Reznikov [1]).
The periodic and chaotic responses in the autoparametric pendulum vibration absorber for a linear mass-spring-damper system have been studied, with the harmonic balance method, by Hatwal et al. [8]. In Cartmell et al. [9,10]is performed a nonlinear frequency analysis using the multiple scales method; here the two mode autoparametricinteraction and robustness, against variations on the excitation frequency, are improved on the overall system bydirect application of an on/off servomechanism, controlling the effective pendulum length and validating also thetheoretical results in an experimental setup. A similar pendulum-type vibration absorber, with time delay in theinternal feedback force, is used to illustrate the real-time application of a dynamic substructuring technique inKyrichko et al. [11]. The harmonic balance method is also applied to study only the dynamic response of a pendulumvibration absorber in Song et al. [12]. Furthermore, Hsieh and Shaw [13] have analyzed the stability problem ofinactive modes, parametrically driven by chaotic motions in the active mode, in certain configuration of a pendulumvibration absorber attached to a Duffing-van der Pol system. The analysis of a class of nonlinear dynamic vibrationabsorbers, with primary and secondary subsystems modelled by Duffing-van der Pol equations, is also consideredby Zhu et al. [14] and references therein. It is important to remark that, in many cases, the nonlinear stiffness canarise from material nonlinearities as well as from geometrical nonlinearities, like in beams and plates [4–6,15].
This paper deals with an autoparametric pendulum vibration absorber connected to a damped Duffing primarysystem. The classical multiple scales method is then applied to get the autoparametric resonance conditions andthe results are compared with similar applications of the pendulum absorber for linear primary systems in Cartmellet al. [4,9,10]. The approximate frequency analysis and amplitude-force responses allow us to conclude that, thenonlinear dynamics and the external harmonic force in the primary system are compensated by the pendulumvibration absorber and, therefore, the amplitude response is equivalent to that obtained for linear primary systems. Incontrast, the nonlinearity certainly affects the frequency response of the pendulum absorber, with an enhancement ofthe effective bandwidth for the autoparametric interaction, phenomenon which may be related to the passive energypumping described in detail by Jiang et al. [16] and references therein. The dynamic performance of the overallsystem is evaluated through numerical simulations.
2. System description
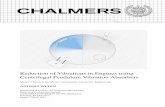
A damped Duffing primary system is attached to a pendulum vibration absorber (see Fig. 1), where the motionis restricted to a horizontal plane, thus neglecting the gravity effects. The primary system is a nonlinear vibratingsystem with massm1, a nonlinear spring with cubic stiffness functionk1x + k2x3 and linear viscous dampingc1.This mechanical system is also affected by an external harmonic forceF (t) = F 0cosΩt, with amplitudeF0 andan excitation frequencyΩ tuned at the principal parametric resonance associated to the primary system. For thepurpose of attenuation of such harmonic vibrations is used a pendulum-type vibration absorber (secondary system),constituted by a lumped massm3 and a rigid bar with massm2 and moment of inertiaI2 with respect to its owncenter of mass. Both the primary and secondary subsystems are coupled by means of a linear spiral springk 3 andlinear viscous dampingc2. The lengthslb and l denote the total pendulum length (bar) and the length measuredalong the bar from the position of the massm3 to the pivot point, respectively.
The equations of motion for the two degrees-of-freedom autoparametric vibration absorber, using Euler-Lagrangemethodology, are obtained as follows (see also [4,7,9])
(m1 +m2 +m3) x+ c1x+ k1x+ k2x3 −(
12m2lb +m3l
) (θ sin θ + θ2 cos θ
)= F0 cosΩt (1)
(14m2l
2b + I2 +m3l
2
)θ + c2θ + k3θ −
(12m2lb +m3l
)x sin θ = 0 (2)

B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system 357
m1
m3
c1
m , I2 2
k x+k x1 2
3
k3
c2
F(t)
l
lb
Fig. 1. Pendulum vibration absorber connected to a damped Duffing primary system.
wherex andθ denote the two generalized coordinates of the system, that is, the horizontal displacement of theprimary system and the angular displacement of the pendulum, respectively. The external harmonic force is describedbyF (t) = F0cosΩt, which directly affects the mass in the primary systemm1, with an excitation frequency close tothe primary resonant frequency. Both Eqs (1) and (2) are internally coupled with nonlinear product terms, which isquite typical in autoparametric systems [4–6]. Note that, in absence of any autoparametric interaction (couplings),between both mechanical systems, the primary system motion can be transformed into a forced and damped Duffingvibrating system, with an inappropriate and large steady-state response because this will be operating under theexternal resonant condition described in [4,9,10].
For small amplitudes inx the influence of the cubic nonlinearity into the Duffing primary system Eq. (3) can beneglected because the dynamic behavior is predominantly linear, simplifying the frequency analysis to that alreadyreported in [4,9,10]. However, for large motions inx the cubic stiffness really affects the nonlinear dynamics inthe primary system but, in this case, the inertial and centrifugal couplings with the pendulum absorber contribute topartially attenuate these undesirable effects.
By defining representative parameters and assuming small oscillations, one can transform the Eqs (1)–(2) inorder to get an approximate analytical solution for the nonlinear frequency response. This procedure results in thefollowing two coupled and nonlinear differential equations
x+ 2εζ1ω1x+ ω21x+ εαx3 − εh
(θθ + θ2
)= εf cosΩt (3)
θ + 2εζ2ω2θ + ω22θ − εgxθ = 0 (4)
where the system parameters are defined by
M =m1 +m2 +m3, J =14m2l
2b + I2 +m3l
2, ω21 =
k1M, ω2
2 =k3J,
εα =k2M, εζ1 = ξ1 =
c12ω1M
, εζ2 = ξ2 =c2
2ω2J, εf =
F0
M,
εh=1M
(12m2lb +m3l
), εg =
1J
(12m3lb +m3l
),
Hereε represents a small perturbation parameter affecting the internal couplings between the pendulum absorberand the Duffing primary system, dampings, nonlinearities and external force into the system, whose influence isimportant in the present nonlinear frequency analysis. Specifically, the above perturbed equations include the cubicnonlinearity in the restoring force for the primary system, which is multiplied by the small perturbation parameterε,that is,εα with a constantα > 0 corresponding to a hardening spring. To establish the influence of the damping inthe overall system, we have defined also the internal damping ratios asξ i = εζi, i = 1, 2. In addition, the amplitudeof the external harmonic force is perturbed asεf .

358 B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system
2.1. Frequency analysis
The classical method of multiple scales is used to find an approximate solution for the perturbed system Eqs (3)–(4)(see Cartmell [4], Nayfeh and Mook [6] and Awrejcewicz and Krysko [17]). Thus, the proposed perturbed solutionsare expressed by
x (T0, T1) = x0 (T0, T1) + εx1 (T0, T1) + . . . (5)
θ (T0, T1) = θ0 (T0, T1) + εθ1 (T0, T1) + · · · (6)
whereT0 = t is the fast time scale,T1= εt is the slow time scale and the remaining time scales are related bythe perturbation asTn= εnt, with n = 0, 1, 2, . . . Time derivatives along different time scales lead to differentialoperatorsd/dt = D0 + εD1 + . . . andd2/dt2 = D2
0 + 2εD0D1 + . . .. For approximation purposes we considersolutions Eqs (5)–(6) up to first orderε terms.
The external and internal resonance conditions,describing the autoparametric interaction between the two-degrees-of-freedom, are described by (see also [4–6])
Ω = ω1 + ερ1 (7)
ω1 = 2ω2 + 2ερ2 (8)
whereερ1 andερ2 define the external and internal detuning parameters, respectively.Substitution of the proposed first order solutions Eqs (5)–(6) into Eqs (3)–(4) and grouping the zero and first order
terms inε, yields the following set of partial differential equations
ε0 : D20x0 + ω2
1x0 = 0 (9)
ε1 : D20x1 + ω2
1x1 = −2ζ1ω1D0x0 − 2D0D1x0 − αx30 + h (D0θ0)
2 + h(D2
0θ0)θ0 + f cos (ΩT0) (10)
ε0 : D20θ0 + ω2
2θ0 = 0 (11)
ε1 : D20θ1 + ω2
2θ1 = g(D2
0x0
)θ0 −D1D0θ0 − 2ζ2ω2D0θ0 (12)
The proposed solutions for Eqs (9) and (11) are harmonics expressed in their polar forms as follows
x0 = A (T1) eiω1T0 +A (T1) e−iω1T0 (13)
θ0 = B (T1) eiω2T0 +B (T1) e−iω2T0 (14)
The solutions for Eqs (10) and (12) strongly depend on the above solutions for Eqs (9) and (11). Hence, substitutingEqs (13)–(14) into Eqs (10) and (12) results in
D20x1 + ω2
1x1 = −2iζ1ω21Ae
iω1T0 − 2iω1A′eiω1T0 − αA3e3iω1T0 − 3αA2Aeiω1T0 − 2hω2B
2e2iω2T0
(15)+
12feiΩT0 + C.C.
D20θ1 + ω2
2θ1 = −gω21ABe
i(ω1+ω2)T0 − gω21ABe
i(ω1−ω2)T0 − 2iω2B′eiω2T0 − 2iζ2ω2Be
iω2T0 + C.C. (16)
whereC.C. stands for complex conjugate terms. Cancellation of secular terms from Eqs (15) and (16), and usingthe polar formsA (T1) = 1
2a (T1) eiδ(T1) andB (T1) = 12 b (T1) eiγ(T1), leads to the following equations described
on the slow time scaleT1
− iζ1ω21a− iω1a
′ + ω1aδ′ − 3
8αa3 − 1
2hω2
2b2eiφ1 +
12feiφ2 = 0 (17)
− 14gω2
1abe−iφ1 − iω2b
′ + bω2γ′ − ibζ2ω2
2 = 0 (18)
φ1 = ρ1T1 − δ (19)
φ2 = 2γ − δ − 2ρ2T1 (20)
wherea′, b′, δ′ andγ ′ denote differentiation with respect to the slow time scaleT1.

B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system 359
2.2. Steady-state response
The steady state responses of the overall system are computed fora ′ = 0, b′ =0, δ′ = ρ1 andγ ′ = ρ12 + ρ2. The
amplitude responses are obtained by taking real and imaginary parts in Eqs (17)–(20) for the steady-state conditions,resulting
ω1aρ1 − 38αa3 − 1
2hω2
2b2 cosφ1 +
12f cosφ2 = 0 (21)
− ζ1ω21a−
12hω2
2b2 sinφ1 +
12f sinφ2 = 0 (22)
− 14gω2
1ab cosφ1 + bω2
(ρ12
+ ρ2)
= 0 (23)
14gω2
1ab sinφ1 − bζ2ω22 = 0 (24)
Now, by solving the above equations we can get the approximate amplitude responses for the primary and secondarysubsystems. Specifically, for the primary system is obtained that
a =4ω2
2
(εg)ω21
√(Ω
2ω2− 1
)2
+ (εζ2)2 (25)
The approximate amplitude response for the secondary system is described implicitly in terms of the real solutionsfor the algebraic equation
b4 +Qb2 +R = 0 (26)
where
Q=12ω2 (εα) (Ω − 2ω2)
3
(εh) (εg)3 ω61
+48ω3
2 (εα) (εζ2)2 (Ω − 2ω2)
(εh) (εg)3 ω61
− 8 (Ω − 2ω2) (Ω − ω1)(εh) (εg)ω1ω2
+16 (εζ1) (εζ2)
(εg) (εh)
R =36ω2
2 (εα)2
(εh)2 (εg)3 ω61
[(Ω
2ω2− 1
)2
+ (εζ2)2
] 32
− 768ω42 (εα) (Ω − ω1)
(εh)2 (εg)4 ω71
[(Ω
2ω2− 1
)2
+ (εζ2)2
]2
+64
[(Ω − ω1)
2 + ω21 (εζ1)
2]
(εh)2 (εg)2 ω22
[(Ω
2ω2− 1
)2
+ (εζ2)2
]− (εf)2
(εh)2 ω42
Note that, the primary system response Eq. (25) does not depend on the cubic stiffness and the external force intothe damped Duffing system. In fact, this amplitude is the same as that determined by Cartmell et al. [4,9,10], wherethere are only linear elements in the primary system. In contrast, the secondary system response in Eq. (26) isindeed influenced by the cubic nonlinearityεα, precisely in the first two terms of the parametersQ andR, meaningthat the cubic term has been transferred from the primary system to the pendulum absorber. Moreover, when thecubic stiffness is neglected (εα = 0), the system response coincides also with that reported by Cartmell et al. [4,9].Therefore, one can conclude some kind of robustness of the pendulum vibration absorber against the cubic stiffnessand the external force, both affecting the primary system.
Remark: A similar multiple scales analysis can prove that, there is also an approximate analytical solution for theoverall system Eqs (3)–(4) when the pendulum absorber remains with any oscillation or is locked up atθ(t) ≡ 0. Thiscase clearly corresponds to the solution of a single degree-of-freedom system, for the well-known damped Duffingsystem Eq. (3), operating under the external resonance condition. The nonlinear frequency response is obtained byreplacingb = 0 in Eqs (21)–(22) and, after some algebraic manipulations, results the following equation
916
(εα)2 a6 − 3 (εα)ω1 (ερ1) a4 + 4ω21
[(ερ1)
2 + ω21 (εζ1)
2]a2 − (εf)2 = 0 (27)

360 B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system
Note that, for primary linear systems (εα = 0) the above equation is simplified to a simple quadratic equation, whosesolution is equivalent to that reported by Cartmell and Lawson [9]. This linear solution is given by
a =εf
2ω1
√(ερ1)
2 + ω21 (εζ1)
2(28)
2.2.1. Fixed pointsBy taking the real and imaginary parts in Eqs (17)–(20) and solving them fora ′, b′, φ′1 andφ′2 result the
differential equations
a′ =−ζ1ω2
1a− 12hω
22b
2 sinφ1 + 12f sinφ2
ω1(29)
b′ =14gω
21ab sinφ1 − ζ2ω2
2b
ω2(30)
φ′1 =ω1aρ1 − 3
8αa3 − 1
2hω22b
2 cosφ1 + 12f cosφ2
ω1a(31)
φ′2 =12gω
31a
2 cosφ1 − 38ω2αa
3 − 12hω
32b
2 cosφ1 + 12ω2f cosφ2 + ω1ω2a2ρ2
ω1ω2a(32)
Now, solving the system Eqs (29)–(32) fora ′ = 0, b′ = 0, φ′1 = 0 andφ′2 = 0 yields the fixed points. In this case,the fixed points for the exact tuningsρ1= ρ2 = 0 (ω1 = Ω andω2 = ω1/2) are calculated as follows
a = ±ζ2g, b =
u
gω31ω2
, φ1 = ±π2, φ2 = arctan
[± (s+ q)
−r]
where
r =48αζ32ω
62
g3ω61f
, s = 8ζ1ζ2ω61ω
22g, q =
hu2
g3ω61f, p = 2304ζ62ω
122 α
2 + 64ζ22ζ21g
4ω121 ω
42 − f2g6ω12
1
Here the amplitudesb and q are parameterized in terms of the parameteru, which represents the roots of thepolynomial(
h2g2)u4 − (
16ζ2ζ1hω61ω
22g
3)u2 + p = 0 (33)
Therefore,b andq are directly affected by the parametersα andf associated to the cubic stiffness and the externalharmonic force, respectively. The total number of real fixed points, including the trivial solution, is at least ten. Infact, the cubic stiffness adds three more non-trivial fixed points to the case studied by Cartmell and Lawson [9].
3. Simulation results
To evaluate the dynamic and steady-state performance of the damped primary Duffing system connected to thependulum vibration absorber, we consider the model Eqs (1)–(2) and the physical system parameters given in Table 1.It is important to remark that, in this model Eqs (1)–(2) is not supposed the small angles assumption, in contrast tothe perturbed model Eqs (3)–(4) used to get the approximate frequency analysis. However, the dynamic responsesand steady-states behavior are quite consistent.
Some numerical simulations are illustrated for variations on the external harmonic force, for the exact tuning aswell as for some non-exact tunings. For the pendulum absorber is performed a comparison of different frequencyresponses obtained for two different amplitudes in the external harmonic force. The approximate frequency anddynamic responses are obtained using Maple9.5 and Simnon 3.0, respectively.
First of all, the amplitude frequency response for the damped Duffing primary system is shown in Fig. 2. Thisresults whenF0 = 10N and there is no autoparametric interaction with the pendulum absorber, that is, whenθ(t) ≡

B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system 361
Table 1Physical system parameters
m1 = 5.0 kg m2 = 1.0 kg m3 = 1 kgk1 = 474.92 N/m k2 = 77.0 N/m3 k3 = 4.0 N-m/radc1 = 1.0 N/(m/s) c2 = 0.01 N-m/(rad/s) F0 = 10 Nl = 0.3 m lb = 0.5 mω1 = 8.2368 rad/s ω2 = 4.1184 rad/s εζ1 = 0.00867εζ2 = 0.00515 εα = 74.25 (N/m3)/kg εh = 0.7854 mεg = 2.3321 m−1 εf = 1.4285 m/s2 ε = 0.55 kg·m
Fig. 2. Frequency response for the damped Duffing system whenF0 = 10 N and the pendulum absorber is locked up atθ(t) ≡ 0.
Fig. 3. Dynamic behavior of the damped Duffing system whenF0 = 10 N and there is no autoparametric interaction (θ(t) ≡ 0).
0 (e.g., using zero initial conditions). This frequency response clearly corresponds to the well-known behavior fora damped Duffing system, describing the classical bent response due to the cubic stiffness associated to a hardeningspring and when no energy pumping occurs. The corresponding dynamic behavior for the primary system, underthe external resonance condition (ερ1 = 0), is described in Fig. 3. Note that the steady-state response achieves a

362 B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system
Fig. 4. Frequency response for the primary system whenF0 = 10 N.
Fig. 5. Frequency response for the secondary system whenF0 = 10 N.
large value (a = 0.3), although this is bounded by the existing damping.The frequency responses for both the primary and secondary systems, under autoparametric interaction and
external harmonic force with amplitudeF0 = 10 N, are described in Figs 4 and 5, respectively. These responsesare obtained directly from Eqs (25) and (26). Note that, exactly at the tuning conditionερ 1 = 0 and also in asmall neighborhood, there is a reasonable energy pumping from the primary system to the pendulum absorber.In fact, for the region delimited by detunings|ερ1| 1.55 (Fig. 5), it is clearly appreciated how the influenceof the cubic stiffness (hardening spring) in the primary system is transferred to the pendulum absorber, situationsignificantly distinctive with respect to those results in Cartmell and Lawson [9]. The transient responses ofthe overall system for exact tuning (ερ1 = 0) and initial conditions leading to autoparametric interaction (i.e.,x(0) = 0 m, x(0) = 0 m/s, θ(0) = 0.6 rad, θ(0) = 0 rad/s) are illustrated in Figs 6 and 7. Here one can observethe attenuation on the primary Duffing system response with respect to the motion of the pendulum absorber. Thisdynamic behavior is quite consistent with the frequency responses predicted in Figs 4 and 5.

B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system 363
Fig. 6. Dynamic behavior for the primary system whenερ1 = 0 andF0 = 10 N.
θ
Fig. 7. Dynamic behavior for the secondary system whenερ1 = 0 andF0 = 10N .
The frequency responses in Figs 4 and 5 exhibit two different steady-state behaviors, for the exact resonanceconditionερ1 = 0 with (a = 0.0022,b = 1.04) and increasing values up to|ερ 1| ≈1.55 yield (a = 0.08,b = 1.41).Detunings|ερ1| >1.55 suddenly reduce the absorption property.
The amplitude-force responses for the pendulum absorber whenερ 1 = 0 (tuned) andερ1 = 1.55 (detuned) areshown in Figs 8 and 9, respectively. In the latter case a smaller frequency response is identified for small amplitudesin the external harmonic force (see also Fig. 5). For instance, we observe in Fig. 8 that, for the parametric forceεf = 1.4286 (F0 = 10 N) the amplitude of the absorber is approximatelyb = 1.04, which is also verified in Fig. 5.Another interesting condition is identified by the detuningερ 1 = 1.55, whose amplitude-force response is shownin Fig. 9; here one can observe the presence of a region denoted byb ∗, corresponding to values of the force that donot satisfy the absorption property. In other words, when the system is detuned andεf < 0.15, the solution is toosmall to induce any motion on the pendulum absorber and, as a consequence, the absorption property on the primaryDuffing system can not be achieved. This amplitude-force response exhibits two branches defined by the solutionsof Eq. (26), such that the solutionb∗ corresponds to values of the forceεf that do not satisfy the lock conditions

364 B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system
0
0.2
0.4
0.6
0.8
1
1.2
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
b (rad)
εf
Fig. 8. Amplitude-force response for the absorber whenερ1 = 0.
1.1
1.2
1.3
1.4
1.5
1.6
1.7
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
b (rad)
εf
b*
Fig. 9. Amplitude-force response for the absorber when whenερ1 = 1.55.
(autoparametric interaction), which is rather equivalent to a force threshold leading to the absorption condition inthe primary system.
In order to illustrate the sensitiveness of the overall system to variations on the amplitude of the external harmonicforce, we now study the effect of varying the magnitude of the external force on the frequency responses. To dothis, we compute the amplitude-force responses whenεf = 0.2857 (F 0 = 2 N) and exact tuning (ερ1 = 0). Thefrequency response for the pendulum absorber is depicted in Fig. 10, while the frequency response for the primaryDuffing system is identical to that in Fig. 4 (see also Eq. (25)). In this context, it results evident the absorptionmechanism of the cubic stiffnessεα and the external forceεf both directly affecting the primary system, whichare actually transferred to the pendulum absorber. The corresponding dynamic behavior is shown in Figs 11 and12, whose steady-state amplitudes are also compatible with their frequency responses (a = 0.0022,b = 0.461).Moreover, the region of autoparametric interaction is simultaneously influenced by the detuning parameterερ 1 and

B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system 365
Fig. 10. Absorber frequency response whenF0 = 2 N.
Fig. 11. Dynamic behavior of the primary system whenερ1 = 0 andF0 = 2 N.
the parametric forceεf (see Figs 8 and 9) and, therefore, the effective absorption in the overall system can bemaintained in spite of variations on the excitation frequency and the amplitude force.
3.1. Stability analysis
In general, the steady-state absorption is affected by the parametric forceεf , the cubic stiffnessεα, the detuningερ1 and the initial conditions, which modify the phases and synchronization between the primary system and thependulum absorber. Some specific operating region is encountered when|ερ 1| 1.55, where the absorption isguaranteed and the amplitude response of the absorber is minimal (see, e.g., Figs 5 and 10). It is important to remarkthat, the amplitude response for the primary systema is independent from the parametric forceεf and the cubicstiffness (see Eq. (25) and Fig. 4).
From Eqs (29)–(32) the fixed points are parameterized by the detuning parameterερ 1, where complicatedexpressions define their numerical values. The stability of such fixed points is analyzed by means of the Routh-

366 B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system
θ
Fig. 12. Dynamic behavior of the pendulum absorber whenερ1 = 0 andF0 = 2 N.
Fig. 13. Dynamic response for the damped primary Duffing system whenερ1 = 0.46 andF0 = 2 N.
Hurwitz criteria. For instance, whenερ1 = 0.46 andεf = 0.2857 (F0 = 2 N) the fixed point (a = 0.024,b =0.527,φ1= 0.0919,φ2 = 0.2495) is unstable. In this case, the transient responses for the primary Duffing systemand pendulum absorber are shown in Figs 13 and 14, respectively.
4. Conclusions
The dynamic response and nonlinear frequency analysis of a damped Duffing system attached to a pendulumvibration absorber, both operating under the external and internal resonance conditions, are discussed. In particular,the effects introduced by the cubic stiffness and the external harmonic force, into the dynamics and frequencyresponse of the primary system, are certainly transferred to the pendulum-type absorber and, hence, the overallsystem performance enjoys some robustness against nonlinearities, external forces as well as variations on theexcitation frequency. The analysis reveals that, when the magnitude of the external force is below a small force

B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system 367
θ
Fig. 14. Dynamic response for the pendulum absorber whenερ1 = 0.46 andF0 = 2 N.
threshold, then, there is not sufficient exogenous energy to bring on the system to the autoparametric interaction and,as a consequence, the vibration attenuation. Moreover, for excitation frequencies close to the exact tuning is stillpossible to reduce simultaneously the amplitude responses of the primary and secondary systems. This operatingcondition is possible due to the presence of the hardening spring and an appropriate force that excite the overallsystem to work preserving the stability properties.
Acknowledgement
The authors would like to acknowledge the useful and fruitful comments of the anonymous reviewers.
References
[1] B.G. Korenev and L.M. Reznikov,Dynamic Vibration Absorbers: Theory and Technical Applications, London: John Wiley & Sons, 1993.[2] J.Q. Sun, M.R. Jolly and M.A. Norris, Passive, adaptive and active tuned vibration absorbers – a survey,Transactions of ASME 117 (1995),
234–242.[3] C.M. Harris,Shock and Vibration Handbook, New York: McGraw-Hill, 1996.[4] M.P. Cartmell,Introduction to Linear, Parametric and Nonlinear Vibrations, London: Chapman and Hall, 1990.[5] A. Tondl, T. Ruijgrok, F. Verhulst and R. Nabergoj,Autoparametric Resonance in Mechanical Systems, Cambridge: Cambridge University
Press, 2000.[6] A.H. Nayfeh and D.T. Mook,Nonlinear Oscillations, New York: John Wiley & Sons, 1979.[7] R.S. Haxton and A.D.S. Barr, The autoparametric vibration absorber,Journal of Engineering for Industry 94(1) (1972), 119–124.[8] H. Hatwal, A.K. Mallik and A. Ghosh, Forced nonlinear oscillations of an autoparametric system – Parts 1 and 2,Journal of Applied
Mechanics 50 (1983), 657–662 and 663–668.[9] M.P. Cartmell and J. Lawson, Performance enhancement of an autoparametric vibration absorber,Journal of Sound and Vibration 177(2)
(1994), 173–195.[10] M.P. Cartmell, On the need for control of nonlinear oscillations in machine system,Meccanica 38 (2003), 185–212.[11] Y.N. Kyrichko, K.B. Blyuss, A. Gonzalez-Buelga, S.J. Hogan and D.J. Wagg, Real-time dynamic substructuring in a coupled oscillator –
pendulum system,Proc Royal Society A 462 (2006), 1271–1294.[12] Y. Song, H. Sato, Y. Iwata and T. Komatsuzaki, The response of a dynamic vibration absorber system with a parametrically excited
pendulum,Journal of Sound and Vibration 259(4) (2003), 747–759.[13] S.R. Hsieh and S.W. Shaw, The stability of modes at rest in a chaotic system,Journal of Sound and Vibration 138(3) (1990), 421–431.[14] S.J. Zhu, Y.F. Zheng and Y.M. Fu, Analysis of non-linear dynamics of a two-degree-of-freedom vibration system with non-linear damping
and non-linear spring,Journal of Sound and Vibration 271(1) (2004), 15–24.[15] G. Verros and S. Natsiavas, Forcing induced asymmetry on dynamical systems with cubic non-linearities,Journal of Sound and Vibration
233(2) (2000), 279–295.

368 B. Vazquez-Gonzalez and G. Silva-Navarro / Evaluation of the autoparametric pendulum vibration absorber for a Duffing system
[16] X. Jiang, D.M. Macfarland, L.A. Bergman and A.F. Vakakis, Steady state passive nonlinear energy pumping in coupled oscillators:theoretical and experimental results,Nonlinear Dynamics 33 (2003), 87–102.
[17] J. Awrejcewicz and V.A. Krysko,Introduction to Asymptotic Methods, Chapman and Hall, Boca Raton: CRC Press, 2006.

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttp://www.hindawi.com Volume 2010
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
DistributedSensor Networks
International Journal of







![L 21 – Vibration and Waves [ 2 ] Vibrations (oscillations) –resonance –pendulum –springs –harmonic motion Waves –mechanical waves –sound waves –musical.](https://static.fdocuments.in/doc/165x107/56649cb95503460f949807a1/l-21-vibration-and-waves-2-vibrations-oscillations-resonance-pendulum.jpg)





![L 21 – Vibration and Sound [1] Resonance Tacoma Narrows Bridge Collapse clocks – pendulum springs harmonic motion mechanical waves sound waves musical.](https://static.fdocuments.in/doc/165x107/5a4d1ace7f8b9ab0599709b7/l-21-vibration-and-sound-1-resonance-tacoma-narrows-bridge-collapse.jpg)
![L 22 – Vibration and Waves [2] resonance clocks – pendulum springs harmonic motion mechanical waves sound waves musical instruments.](https://static.fdocuments.in/doc/165x107/56649f185503460f94c2f629/l-22-vibration-and-waves-2-resonance-clocks-pendulum-.jpg)

