Equation of motion of a variable mass system3
71
1 EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEM LAGRANGIAN APPROACH SOLO HERMELIN http://www.solohermelin.com
-
Upload
solo-hermelin -
Category
Science
-
view
624 -
download
3
description
This is the third of three presentations (self content) for derivation of equations of motions of a variable mass system containing moving solids (rotors, pistons,..) and elastic parts. It uses the Lagrangian approach. It is recommended to see the first presentation before this one. Each presentation uses a different method of derivation.. This is the more difficult of the three presentations. The presentation is at undergraduate (physics, engineering) level. Please sent comments for improvements to [email protected]. Thanks! For more presentations on different subjects please visit my website at http://www.solohermelin.com
Transcript of Equation of motion of a variable mass system3

1
EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEM
LAGRANGIAN APPROACH
SOLO HERMELIN
http://www.solohermelin.com

2
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEM
• Simplified Particle Approach (see Power Point Presentation)
The equations of motion can be developed using
At a given time t the system has
v (t) – system volume.
m (t) – system mass.
S (t) – system boundary surface.
• Reynolds’ Transport Theorem Approach (see Power Point Presentation)
• Lagrangian Approach (this Power Point Presentation)

3
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
TABLE OF CONTENT
• Generalized Forces
Joseph-Louis Lagrange
1736-1813
• Lagrange’s Equations of Motion
• Principal Coordinate Frames
• Inertial Coordinate Frame
• Body Coordinate Frame
• Body Mean System Axes
• Orientation of Body Frame
• Kinetic Energy of the System
• Potential Energy of the System • Elastic Potential Energy
• Gravitational Potential Energy
• Computation of Lagrange’s Equations in Body Coordinates
• Derivation of Equations of Motion
• Summary of the Equations of Motion of a Variable Mass System
• References • Appendix A: Lagrange Equations

4
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Lagrange’s Equations of Motion
The Lagrange’s Equations of Motion for a dynamic system are:
iiii
QUTT
td
d =
∂∂+
∂∂−
∂∂
ξξξ
- system kinetic energy. T
- system potential energy. U
- generalized coordinates (i=1,2,…, number of degrees of freedom of the system).iξ
- generalized force along the generalized coordinate given by.iξiQ( )( )i
i
WQ
ξδδ
∂∂=
-virtual work done on the system by all external forces/moments (excluding
those accounted for in the potential energy term) during virtual displacement
along all the generalized coordinates.
Wδ
Table of Contents

5
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Principal Coordinate Frames
R
- Position of the mass element dm relative to I.
Itd
RdV
= - Velocity of the mass element dm relative to I.
IItd
Rd
td
Vda
2
2
== - Acceleration of the mass element dm relative to I.
Inertial Coordinate Frame
(vector form) orIzIyIx zRyRxRR ˆˆˆ ++=
IzIyIx
I
zRyRxRtd
RdV ˆˆˆ
++== (vector form) or
(vector form) orIzIyIx
II
zRyRxRtd
Rd
td
Vda ˆˆˆ
2
2
++===
{ }Tzyx RRRR ,,=
(matrix form)
( ) { }T
zyxI RRRV
,,= (matrix form)
( ) { }T
zyxI RRRa
,,= (matrix form)Table of Contents

6
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Principal Coordinate Frames (continue - 1)
Cr,
- Position of the mass element dm relative to C.
Body Coordinate Frame
The origin of the Body Frame (B) is located at theinstantaneous Centroid (C) of the system.
0,
=∫m
C mdr
R
- Position of the mass element dm relative to I.
CR
- Position of the centroid C relative to I.
CC rRR ,
+=
0,Cr
- Position of the same mass element dm in the un-deformed system, relative to C.
e
- Change in position of the mass element dm due to elastic deformation of the system.
err CC
+= 0,,
Table of Contents

7
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Principal Coordinate Frames (continue - 2)
Body Mean System Axes
Mean Body System Axes are defined such that therelative linear and angular momentum, due toelastic deformation, are zero at every instant.
The Body Mean Axes must satisfy the following:
0
=∫ mdtd
ed
Bm
0,
=∫ × md
td
edr
BmC
0, =∫ ⋅ mdtd
ed
td
rd
Bm B
C
Table of Contents

8
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
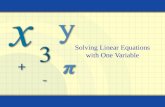
Structural Model of the System
Assume that the elastic deformations are small, and can berepresented in terms the normal un-damped modes of vibration.
( ) ( )∑=∞
=1iii tRe ηφ
- are mode shape functions that depend on the position of the mass element of the system.( )Ri
φ
- are generalized coordinates giving the magnitude of the modal displacements and are functions of time.
( )tiη
Structural Dynamic Analysis (e.g. final element method) provides the mode shapefunctions component of each element of the system, as well as the vacuo modalfrequencies ( ) , for a selected number of modes.
( )Ri
φ
iω
iii
td
d ηωη 2
2
2
−=
The mode shape functions are orthogonal.
0ji
m
ji md≠=⋅∫ φφ
i
m
ii Mmd =∫ φφ
MV
Bx
By
BzWz
Wy
Wx
αβ
αβ
Bp
Wp
Bq
WqBrWr
FIRST ELASTIC MODE
SECOND ELASTIC MODE

9
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Principal Coordinate Frames (continue - 3)
Orientation of the Body Frame
The orientation of the Body Frame relative to theInertial Frame has three degrees of freedom. We will use 3 Euler Angles that define the orientationby three consecutive rotations around the consecutiveframe axes.
[ ]
−=
11
1111
0
0
001
:
θθθθθ
cs
sc
[ ]
−=
22
22
22
0
010
0
:
θθ
θθθ
cs
sc
[ ]
−=
100
0
0
: 33
33
33 θθθθ
θ cs
sc
The three basic Euler rotations aroundaxes are described by the rotation matrices:
,3,2,1

10
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Principal Coordinate Frames (continue - 4)
Orientation of the Body Frame (continue – 1)
Using the basic Euler Angles we can define the following 12 different rotations:
(a) six rotations around three different axes:
321 →→ 231 →→ 312 →→ 132 →→ 213 →→ 123 →→
(b) six rotations such that the first and third are around the sam axes, but the second is different:
121 →→ 131 →→ 212 →→ 232 →→ 313 →→ 323 →→
Suppose that the Transfer Matrix from Inertia to Body is defined by threeconsecutive Euler Angles: around (unit vector in Inertial Frame),around (unit vector in intermediate frame), around (unit vectorin Body Frame).
BIC
iθ Ii jθInterj
kθ Bk
[ ] [ ] [ ] [ ] [ ] TBI
BI
IB
IB
BIkkjjii
BI CCCICCC ==→==
−1&θθθ

11
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Principal Coordinate Frames (continue - 5)
Orientation of the Body Frame (continue – 2)
The angular velocity vector of rotation of the Body frame relative to Inertia frame is:
kIjIntriBIB kji θθθω ˆˆˆ ++=← In Body frame this is:
( ) ( ) ( ) ( ) ( ) [ ] ( ) [ ] [ ] ( )k
IIjjiij
IntrIntriii
BBk
BIj
BIntri
BB
BIB kjikji θθθθθθθθθω ˆˆˆˆˆˆ ++=++=←
[ ] ( ) [ ] ( ) [ ] [ ] ( )[ ] { } { } { }[ ]
=
=
=←
k
j
i
k
j
i
IIjjii
IntrIntrii
BB
BIB DDDkji
r
q
p
θ
θ
θ
θ
θ
θ
θθθω
321ˆˆˆ:
{ } ( ) ( ){ } ( ) [ ] ( ) ( ){ } ( ) [ ] [ ] ( )
{ } { } { }[ ]321
321
:
ˆˆ:,&ˆˆ:&ˆ:
DDDD
kkDjjDconstiD IIjjii
BIji
IntrIntrii
BIntri
BB
=
======→
θθθθθθ
( ) [ ] [ ] ( ) { } { } { }[ ]
=
==
=
=←
k
j
i
k
j
i
E
k
j
i
BIB DDD
DDD
DDD
DDD
DD
r
q
p
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
ω
321
333231
232221
131211
:
where:
or

12
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Principal Coordinate Frames (continue - 6)
Orientation of the Body Frame (continue – 3)
The velocity vector of the system centroid C is given by:
( ) [ ] ( )
==
=
=
Cz
Cy
Cx
IC
Cz
Cy
Cx
BI
BC
R
R
R
CCC
CCC
CCC
RC
R
R
R
C
w
v
u
V
333231
232221
131211
:
The following relations will be useful:
and
( )
=
k
j
i
E
θθθ
θ : andwhere [ ] ( )
−−
−=×←
0
0
0
:
pq
pr
qrB
IBω
Table of Contents
( ){ }( ) [ ] ( )B
IBT
E
TBIB
T
Dtd
Dd ×+∂
∂= ←
← ωθ
ω Appendix
[ ] [ ] [ ] ( )BIB
TBI
TBI CC
td
d ×= ←ω Appendix

13
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Kinetic Energy of the System
( )∫ ⋅=
tm II
mdtd
Rd
td
RdT
2
1Kinetic Energy of the System
We have:
We can write
( )∫
+⋅
+=
tm I
CC
I
CC md
td
rdV
td
rdVT ,,
2
1
( )( ) ( ) ( )
∫ ⋅+∫+∫⋅=tm I
C
I
C
tm I
CC
tmCC md
td
rd
td
rdmd
td
rdVmdVV ,,,
2
1
2
1
(a) (b) (c)
Let develop each of the three parts of this expression
erRrRR CCCC
++=+= 0,,
I
CC
I
C
I
C
Itd
rdV
td
rd
td
Rd
td
Rd ,,
+=+=

14
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Kinetic Energy of the System (continue – 1)
(a) ( )( )
( ) mVVmdVV CCtm
CC
⋅=∫⋅
2
1
2
1
(b)
Use Reynolds’ Transport Theorem when we differentiate( )
0,
=∫tm
C mdr
Therefore( )
∑∫ −=openings
iifluidCiopen
tmB
C mrmdtd
rd
,
, ˆ
and
( ) ( )∫
×+⋅=∫⋅ ←
tmCIB
B
CC
tm I
CC mdr
td
rdVmd
td
rdV ,
,,
ω
( ) ( ) ( )∑∫∑ ∫∫∫∫ +=+=
=openings
ifluidCiopentm
B
C
i SC
tmB
CREYNOLDS
Btm
C mrmdtd
rdmdrmd
td
rdmdr
td
d
iopen
,
,
,
,
,ˆ0
( ) ( )∑⋅−=∫⋅=∫⋅
openingsifluidCiopenC
tm B
CC
tm I
CC mrVmd
td
rdVmd
td
rdV
,
,, ˆ
( ) ( ) ( )∫∫∫ ⋅=
×⋅+⋅= ←tm
B
C
Ctm
CIBCtm
B
C
C mdtd
rdVmdrVmd
td
rdV ,
0
,
,
ω

15
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Kinetic Energy of the System (continue – 2)
(c)( ) ( )
∫
×+⋅
×+=∫ ⋅ ←←
tmCIB
B
CCIB
B
C
tm I
C
I
C mdrtd
rdr
td
rdmd
td
rd
td
rd,
,,
,,,
2
1
2
1
ωω
( )∫ ⋅=tm B
C
B
C mdtd
rd
td
rd ,,
2
1
(c1)
( )( )∫ ×⋅
+ ←
tmCIB
B
C mdrtd
rd,
,
ω
(c2)
( ) ( )( )∫ ×⋅×+ ←←tm
CIBCIB mdrr ,,2
1 ωω(c3)
(c1)( ) ( )
∫
+⋅
+∫ =⋅
tm BB
C
BB
C
tm B
C
B
C mdtd
ed
td
rd
td
ed
td
rdmd
td
rd
td
rd 0,0,,,
2
1
2
1
( ) ( ) ( )∫
⋅
+∫
⋅
∫ +⋅=
tm BBtm BB
C
tm B
C
B
C mdtd
ed
td
edmd
td
ed
td
rdmd
td
rd
td
rd
2
1
2
1
0
0,0,0,
( )( ) ( )∑ ∫ ×⋅×+∫ ⋅= ←←
rotors mCjrotorBjrotorCjrotorBjrotor
tmFrozenRotors
B
C
FrozenRotorsB
C
jrotor
mdrrmdtd
rd
td
rd,,
,,
2
1
2
1
ωω
( )( )∑ ∫
⋅×+∫
⋅+ ←
rotors m B
CjrotorBjrotortm BFrozenRotors
B
C
jrotor
mdtd
edrmd
td
ed
td
rd
0
,
0
, ω( )∫
⋅
+
tm BB
mdtd
ed
td
ed
2
1
( )∫ ⋅=tm
FrozenRotorsB
C
FrozenRotorsB
C mdtd
rd
td
rd ,,
2
1 ( )∑
∫ ××−⋅+
←⋅
←←rotors
I
mBjrotorCjrotorCjrotorBjrotor
BjrotorCjrotor
jrotor
mdrr
ω
ωω
,
,,2
1
( )∫ ∑∑
∞
=
∞
=+
tm
j
i j
iji md
td
d
td
d ηηφφ1 12
1

16
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
( )( )∑ ⋅⋅+∫ ∫ ⋅=⋅ ←←
rotorsBjrotorCjrotorBjrotor
tm tmFrozenRotors
B
C
FrozenRotorsB
C
B
C
B
C Imdtd
rd
td
rdmd
td
rd
td
rdωω
,,,,,
2
1
2
1
2
1
Kinetic Energy of the System (continue – 3)
(c3)
(c2)
( )∫ ∑
∞
=
+
tm i
ii md
td
d
1
2
2
2
1 ηφ
( )[ ]∫ −⋅=jrotorm
CjrotorCjrotorCjrotorCjrotorCjrotor mdrrrrI ,,,,, 1:
where Second Moment of Inertia Dyadic of the Rotor j Relative to C
( )( )
( )( ) ( )
∫
×⋅=∫
⋅×=∫ ×⋅
←←←
tm B
CCIB
tm B
CCIB
tmCIB
B
C mdtd
rdrmd
td
rdrmdr
td
rd ,,
,,,
,
ωωω
( ) ( )
0
,0,
, ∫
×⋅+∫
×⋅= ←←
tm B
CIBtm B
CCIB md
td
edrmd
td
rdr ωω
( )( )( )∑ ∫ ××⋅+∫
×⋅= ←←←
rotors mCjrotorBjrotorCjrotorIB
tmFrozenRotors
B
CCIB mdrrmd
td
rdr ,,
,,
ωωω
( )[ ] [ ] Bjrotor
rotors mCjrotorCjrotorIB
tmFrozenRotors
B
CCIB mdrrmd
td
rdr ←←← ∑
∫ ××−⋅+∫
×⋅= ωωω
,,,
,
( )[ ]∑⋅+∫
×⋅= ←←←
rotorsBjrotorCrotorjIB
tmFrozenRotors
B
CCIB Imd
td
rdr ωωω
,,
,

17
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Kinetic Energy of the System (continue – 4)
(c3)
( )[ ]( )∫ −⋅=
tm
OOOOO mdrrrrI ,,,,, 1:
where Second Moment of Inertia Dyadic of the System Relative to O
( ) ( )( )
[ ] [ ]( )
IBtm
CCIBtm
CIBCIB mdrrmdrr ←←←←
∫ ××−⋅=∫ ×⋅× ωωωω ,,,, 2
1
2
1
IBCIB I ←← ⋅⋅= ωω ,2
1

18
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Kinetic Energy of the System (continue – 5)
To summarize, the Kinetic Energy of the system is given by
( )( ) ( ) ( )
∫ ⋅+∫⋅+∫⋅=tm I
C
I
C
tm I
CC
tmCC md
td
rd
td
rdmd
td
rdVmdVVT ,,,
2
1
2
1
( ) ∑⋅−⋅=openings
iifluidCiopenCCC mrVmVV
,
ˆ2
1IBCIB I ←← ⋅⋅+ ωω
,2
1
( )∑ ⋅⋅+∫ ⋅+ ←←
rotorsBjrotorCrotorjBjrotor
tmFrozenRotors
B
C
FrozenRotorsB
C Imdtd
rd
td
rdωω
,,,
2
1
2
1
∑∞
=
+
1
2
2
1
ii
i Mtd
dη( )
∑ ⋅⋅+∫
×⋅+ ←←←
rotorsBjrotorCrotorjIB
tmFrozenRotors
B
CCIB Imd
td
rdr ωωω
,,
,
Table of Contents

19
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Potential Energy of the System
We consider only
(Electromagnetic, Chemical Potentials are not considered)
ge UUU +=
Elastic Deformation Potential eU
Gravitational Field Potential gU
Table of Contents

20
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Potential Energy of the System
Elastic Deformation Potential eU
( ) ( )∑∞
=
=1i
iii tle ηφ
iii
td
d ηωη 2
2
2
−= i
m
ii Mmd =∫ φφ
0ji
m
ji md≠
=∫ φφ
∫ ∑∑∫
−⋅
−=
⋅−=
∞
=
∞
=m iiii
jjj
m B
e mdmdtd
edeU
1
2
12
2
2
1
2
1 ηωφηφ
( ) ( ) ∑∑ ∫∑∑ ∫∞
=
∞
=
∞
=
∞
=
=
⋅=
⋅=
1
22
1
22
1 1
2
2
1
2
1
2
1
iiii
iii
m
iij i
jii
m
ij Mmdmd ηωηωφφηηωφφ
iiii
e MU ηωη
2=∂∂
From
We obtain
From this we obtain
Table of Contents

21
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Potential Energy of the System (continue – 1)
Gravitational Field Potential gU
( )2
2
01E
EarthEE
R
RgRRg
−=
220 sec/17.32sec/78.9 ftmg ==
where
mREarth 135.378.6=
( ) ( )
( ) 2/1
2
0
2
02
2
0
2
0
2
2
0
1
1
CECE
Earth
CE
Earth
m
CE
CE
Earth
CE
Earth
m E
EarthECCE
m
CCEg
RR
Rgm
R
RgmmdrR
R
Rg
R
Rgm
mdR
RgRrRmdgrRU
⋅==⋅+=
⋅+−=⋅+=
∫
∫∫
( ) CE
CE
CE
EarthCE
CECE
Earth
C
g
R
R
R
RgmR
RR
Rgm
R
U
2
2
02/3
2
0 22
1 −=⋅
−=∂∂
( )CECE
CE
Earth
C
g RgmRR
Rgm
R
U =−=
∂
∂1
2
2
0
From this we obtain
or
Table of Contents

22
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Generalized Forces
- generalized force along the generalized coordinate given by.iξiQ( )( )i
i
WQ
ξδδ
∂∂=
-virtual work done on the system by all external forces/moments (excluding
those accounted for in the potential energy term) during virtual displacement
along all the generalized coordinates.
Wδ
The generalized forces are:
PQ - due to position change, relative to inertial system ( ) [ ] Tzyx
IP RRRR ==
ξ
- due to rotation of the system, around its centroid, relative to inertial systemRQ
( ) [ ] Tkji
ER θθθθξ ==
- due to elastic modal displacementsEQ [ ] TE
4321 ηηηηηξ ==

23
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
( ) ( ) ( )∑+=openings
iiopenW tStStS
Generalized Forces (continue – 1)
Virtual Work due to Position Change, Relative to Inertial Frame
The virtual work done by change in position is due to pressure distribution and fluid flow through the openings, and to discrete forces applied on the system
( ) RFtd
RdmdstfnpW
openings jj
I
ifluid
ifluidS
P
vehicle
δδ ⋅
+
++−= ∑ ∑∫
ˆ11
where
• Sw(t) the impermeable wall through which the flow can not escape .( )0,
=sV
• Sopen i(t) the openings (i=1,2,…) through which the flow enters or exits .( )0>m ( )0<m
( )2/mN p - pressure on (normal to) the surface .
f - friction force per (parallel to) unit surface .( )2/mN
n1 - outward unit vector normal to the surface element ds
t1 - local unit vector of tangential stress due to flow on the surface element ds
∑j
jF
- discrete forces applied to the system at the position jR
( )N
is the mean position vector of the flow and of the opening on iopenSifluidR
fluidm - fluid rate flowing through the opening iopenS

24
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Generalized Forces (continue – 2)
Si
I
CiopenIC
I
iopenfluid
I
Ciopen
I
C
I
ifluid Vtd
rdV
td
rd
td
rd
td
Rd
td
Rd,
,,, ˆˆˆˆˆ
++=++=
- velocity of the centroid C of the system relative to inertiaCV
I
Ciopen
td
rd ,
- mean velocity of the opening i relative to the centroid C
SiV,
- mean velocity of the fluid relative the opening i
Virtual Work due to Position Change, Relative to Inertial Frame (continue – 1)

25
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Generalized Forces (continue – 5)
A virtual rotation( )
kIjIntriBE kji θδθδθδθδ ˆˆˆ ++=
will produce a virtual displacement: ( )C
EC rr ,,
×= θδδ
( ) ( )∑∑∑∫ ⋅+⋅+
⋅++−⋅=
k
E
kj
jCjopenings
I
ifluid
ifluidCiopenS
CR MFrtd
RdmrdstfnprW
vehicle
θδδδδδ
,,,
ˆˆ11
( )( ) ( ) ( )( )( )( ) ( )∑∑
∑∫
⋅+⋅×+
⋅×++−⋅×=
k
E
kj
jCj
E
openings
I
ifluid
ifluidCiopen
E
SC
E
MFr
td
Rdmrdstfnpr
vehicle
θδθδ
θδθδ
,
,,
ˆˆ11
( ) ( )
+×+
×++−×⋅= ∑ ∑∑∫
openings kk
jjCj
I
ifluid
ifluidCiopenS
C
E MFrtd
Rdmrdstfnpr
vehicle
,,,
ˆˆ11θδ
The virtual work done along the generalized coordinates (rotation around C relative to inertial frame around Euler axes) is done by the pressure distribution, the flow through the openings and the discrete forces and moments applied on the system:
( )Eθ
Virtual Work due to Rotation, Relative to Inertial Frame

26
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Generalized Forces (continue – 6)
- due to elastic modal displacementsEQ [ ] TE
4321 ηηηηηξ ==
The virtual work done during the elastic deformations along thr generalized coordinates is done by the pressure distribution on the wetted area of the system and the discrete forces and moments applied on the system:
e
( )
( ) ( ) ( ) ( )∑ ∑∑ ∑∫ ∑
∑∑∫
×∇⋅+
⋅+
⋅+−=
×∇⋅+⋅+⋅+−=
∞
=
∞
=
∞
= k iiik
j iiij
S iii
kk
jj
SE
MFdstfnp
eMeFdsetfnpW
W
vehicle
111
11
11
δηφδηφδηφ
δδδδ
( )( ) ( )[ ]
,2,111 =∑ ×∇⋅+∑ ⋅+∫ ⋅+−=
∂∂= ∞ iMFdstfnpp
WQ
kik
lil
Si
i
PEi
W
φφφηδ
δGeneralized Elastic Forces

27
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Generalized Forces (continue – 7)
Let add to this equation the following
( )( )
( )01
0
,
5
=∫∫∫ ×∇=∫ ×− ∞∞V
C
GGauss
tSCS dvrpdsnpRR
( ) ( ) ( )0111
0
=⋅∇== ∫∫∫ ∞∞∞tv
Gauss
tStS
dvnpdsnpdsnp
( )[ ] RFtd
RdmdstfnppW
openings jj
I
ifluidifluid
S
P
vehicle
δδ ⋅
+
++−= ∑ ∑∫ ∞
ˆ11
( )[ ] ( )E
openings kk
jjCjSi
I
Ciopen
CifluidCiopenS
CR MFrVtd
rdVmrdstfnpprW
vehicle
θδδ
⋅
+×+
++×++−×= ∑ ∑∑∫ ∞ ,,
,
,,
ˆˆ11
( ) ( ) ( ) ( )∑ ∑∑ ∑∫ ∑
×∇⋅+
⋅+
⋅+−=
∞
=
∞
=
∞
= k iiik
j iiij
S iiiE MFdstfnpW
W111
11 δηφδηφδηφδ
where is the pressure far away from the system, to obtain∞p

28
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Generalized Forces (continue – 8)
From those equations we obtain
( ) ( )( )( )
( )I
openings jj
I
iopenI
Cifluidi
TiAI
C
PI
P Ftd
rdVmFF
R
WQ
+
+++=
∂∂= ∑ ∑∑∑
ˆ
δδ
Generalized Position Forces in Inertial Frame
( ) ( )[ ] ( )∫∑ +−= ∞
WsS
IIA dstfnppF
11
Aerodynamic Forces in Inertial Frame
( ) ( )[ ] ( )∑∑ −+= ∞openings
I
iopenSiifluidi
ITi nppSVmF
1, Thrust Forces in Inertial Frame

29
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Generalized Forces (continue – 9)
Generalized Moments around Euler Axes (E), relative to C
Aerodynamic Moments relative to C
Thrust Moments relative to C
( ) ( )( )( ) ( )[ ]∫ +−×=
∂∂= ∞
vehicleS
CERE
R dstfnpprW
Q
11,θδδ
∑ ∑∑ +×+
++×+
openings kk
jjCjSi
I
CiopenI
CifluidCiopen MFrVtd
rdVmr
,,
,
,
ˆˆ
( )[ ]∫ +−×= ∞
WS
C dstfnppr11 ( )[ ]∑ +−×+ ∞
openingsSiifluidopeniCiopen VmnppSr ,, 1
∑∑∑ +×+
+×+
kk
jjCj
openings
I
CiopenI
CCiopenifluid MFrtd
rdVrm
,
,
,
ˆˆ
( ) ( )( )( )
( )E
openings kk
jjCj
I
CiopenI
CCiopenifluidi
CTiCAE
RE
R MFrtd
rdVrmMM
WQ
+×+
+×++=
∂∂
= ∑ ∑∑∑∑
,
,
,,,
ˆˆ
θδδ
( )[ ]∫∑ +−×= ∞
WS
CCA dstfnpprM11:,
( )[ ]∑∑ −+×= ∞openings
iopenSiifluidCiopeni
CTi nppSVmrM
1ˆ: ,,,

30
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Generalized Forces (continue – 10)
We want to find the Generalized Moments around Body Axes. We must find the transformation from the non-orthogonal Euler Axes (E) to Body Axes (B).
( ) ( ) [ ] ( ) [ ] [ ] ( )[ ] { } { } { }[ ] ( )E
k
j
i
k
j
iI
IjjiiIntr
IntriiB
BB DDDDkji θδ
θδθδθδ
θδθδθδ
θθθθδ
=
=
= 321
ˆˆˆ
( ){ } ( )[ ]( )
( ){ } ( )[ ]( )B
openings kk
jjCj
I
ifluidifluidCiopen
S
CTTE
B
openings kk
jjCj
I
ifluidifluidCiopen
S
C
TER
MFrtd
RdmrdstfnpprD
MFrtd
RdmrdstfnpprDW
vehicle
vehicle
+×+
×++−×=
+×+
×++−×=
∑ ∑∑∫
∑ ∑∑∫
∞
∞
,,,
,,,
ˆˆ11
ˆˆ11
θδ
θδδ
( ) ( )( )( )
( )B
openings kk
jjCj
I
CiopenI
CCiopenifluidi
CTiCA
T
E
RB
R MFrtd
rdVrmMMD
WQ
+×+
+×++=
∂∂= ∑ ∑∑∑∑
,
,
,,,
ˆˆ
θδδ
Table of Contents

31
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Computation of Lagrange Equations in Body Frame
The generalized coordinates are [ ]TE
TR
TP ξξξξ
=
where( ) [ ] T
CzCyCxI
CP RRRR ==
ξ
( ) [ ] Tkji
ER θθθθξ ==
[ ] TE
4321 ηηηηηξ ==
The velocity vector of the system centroid C is given by:
( ) [ ] ( )
==
=
=
Cz
Cy
Cx
IC
Cz
Cy
Cx
BI
BC
R
R
R
CCC
CCC
CCC
RC
R
R
R
C
w
v
u
V
333231
232221
131211
:
The angular velocity of rotation of the Body relative to inertia is:
[ ] [ ] [ ] ( ) { } { } { }[ ]
=
==
=
=←
k
j
i
k
j
i
E
k
j
i
BIB DDD
DDD
DDD
DDD
DD
r
q
p
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
ω
321
333231
232221
131211
:

32
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Computation of Lagrange Equations in Body Frame (continue – 1)
We want to perform a change of coordinates from to( )ξξ , ( )w,ξ
{ } { }ηθηηθθθξ ,,,,,,,,,,: 21321TT
CT
CzCyCx RRRR
==
{ } { }ηωηη ,,,,,,,,,,: 21T
BT
CT Vrqpwvuw ==
- system potential energy. ( )ξU
- generalized force along the generalized coordinate given by.iξiQ
( ) ( )wTT ,, ξξξ = - system kinetic energy.
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( ) ( )( )ηωηθ
ηωθηθηθηθ
,,,,,
,,,,,,,,,, 1
BB
BC
EIC
BB
BC
ETEIC
EIC
EIC
VRT
DVCRTRRT
=
=
−
The coordinates are called quasi-coordinates (see Meirovitch [4], pg. 157),
to differentiate from the Lagrangian’s coordinates that describe the degrees
of freedom.
( )ξξ ,
( )w,ξ

33
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Computation of Lagrange Equations in Body Frame (continue – 2)The Lagrange’s Equations of Motion are:
iiii
QUTT
td
d =
∂∂+
∂∂−
∂∂
ξξξ
Let outline (full derivation of the equation on this page is done in Appendix ) the derivation of the Lagrange’s Equations in Body Coordinates
( )
( )
( ) ( )( )( ) ( )
∂∂=
∂∂
∂
∂=
∂
∂B
C
ETB
CI
C
BC
IC
V
TC
V
T
R
V
R
T
θ Appendix
( ) ( )
( ){ }( ) ( )
( ){ }( ) ( )
∂∂
∂∂
+
∂∂
∂∂
+
∂∂=
∂∂
←
←B
CE
TBC
BIB
E
TBIB
EE V
TVTTT
θωθ
ωθθ
Appendix
( ) ( )
∂∂=
∂∂
IC
IC R
T
R
T Appendix
( ) ( )
( ){ }( ) ( )
( ){ }( ) ( )
( )
( ){ }( ) ( ) [ ] ( )
( )
∂∂×−
∂∂
∂∂+
∂∂=
∂∂
∂∂+
∂∂
∂∂+
∂∂=
∂∂
←
←
←
←
BC
B
CT
BIB
E
TBIB
E
BC
E
TBC
BIB
E
TBIB
EE
V
TVD
TT
V
TVTTT
ωθω
θ
θωθω
θθAppendix

34
( ) ( ) ( ) [ ] [ ] ( )IP
CCB
C
TBI
BC
TBII
CI
CI
C
QR
U
R
T
V
T
td
Cd
V
T
td
dC
R
U
R
T
R
T
td
d
=
∂∂+
∂∂−
∂∂+
∂∂=
∂
∂+
∂∂−
∂
∂
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Computation of Lagrange Equations in Body Frame (continue – 3)From
( )
( )
( ) ( )( )( ) ( )
∂∂=
∂∂
∂
∂=
∂
∂B
C
ETB
CI
C
BC
IC
V
TC
V
T
R
V
R
T
θ ( ) ( )
∂∂=
∂∂
IC
IC R
T
R
T
( ) ( ) ( )
∂∂+
∂∂−
∂
∂EEE
UTT
td
d
θθθ
( ) ( ) ( ) ( )
∂∂+
∂∂−
∂∂+
∂∂=
←←EEB
IB
T
BIB
T UTT
td
DdT
td
dD
θθωω
( ){ }( ) ( ) [ ] ( )
( )( )E
RBC
BC
TB
IBE
TBIB Q
V
TVD
T
=
∂∂×+
∂∂
∂∂
−←
→
ωθω
From
we obtain
( ) ( )
( ){ }( ) ( )
( ){ }( ) ( )
∂∂
∂∂
+
∂∂
∂∂
+
∂∂=
∂∂
←
←B
CE
TBC
BIB
E
TBIB
EE V
TVTTT
θωθ
ωθθ ( ) ( )
( ){ }( ) ( ) [ ]( )
( )
∂∂×−
∂∂
∂∂+
∂∂=
∂∂
←
←B
C
B
CT
BIB
E
TBIB
EE V
TVD
TTT
ωθω
θθwe obtain

35
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Computation of Lagrange Equations in Body Frame (continue – 4)Using
[ ] [ ] [ ] ( )BIB
TBI
TBI Ctd
Cd×= ←ω
and ( ){ }
( ) [ ] ( )BIB
TE
TBIB
T
Dtd
Dd ×+∂
∂= ←
← ωθ
ω
we can compute
( ) ( ) ( )
∂∂+
∂∂−
∂
∂I
CI
CI
CR
U
R
T
R
T
td
d
[ ] ( )[ ]
( ) ( ) ( )
∂∂+
∂∂−
∂∂+
∂∂=
IC
IC
BC
TBI
BC
TBI
R
U
R
T
V
T
td
Cd
V
T
td
dC
[ ] ( ) [ ] [ ] ( )( ) ( ) ( )
( )IPI
CI
CB
C
BIB
TBIB
C
TBI Q
R
U
R
T
V
TC
V
T
td
dC
=
∂∂+
∂∂−
∂∂×+
∂∂= ←ω

36
SOLOEQUATIONS OF MOTION OF A VARIABLE MASS SYSTEM
LAGRANGIAN APPROACH
Computation of Lagrange Equations in Body Frame (continue – 5)
Finally
( ) ( ) ( )
∂∂+
∂∂−
∂
∂EEE
UTT
td
d
θθθ
( ) ( ) ( ) ( )
∂∂+
∂∂−
∂∂+
∂∂=
←←EEB
IB
T
BIB
T UTT
td
DdT
td
dD
θθωω
[ ] ( )( )
( ){ }( ) ( )
∂∂
∂∂
−
∂∂×+
←
→B
IBE
TBIB
BC
BC
T T
V
TVD
ωθω
( ) [ ] ( )( ){ }
( ) ( ) ( ) ( )
∂∂+
∂∂−
∂∂
∂∂
+×+
∂∂=
←
→←
←EEB
IBE
TBIBB
IBT
BIB
T UTTD
T
td
dD
θθωθωω
ω
[ ]( )( )
( ){ }( ) ( )
( )ER
BIB
E
TBIB
BC
B
CT
Q
T
V
TVD
=
∂∂
∂∂−
∂∂×+
←
→
ωθω
[ ] ( )( ) ( )
( )IP
BII
C
BII
C
BIB
C
BIBB
C
QCR
UC
R
TC
V
T
V
T
td
d
=
∂∂+
∂∂−
∂∂×+
∂∂
←ω
( ) [ ] ( )( ) [ ]( )
( ) ( ) ( )( )E
RT
E
T
E
TB
C
B
CBIB
BIBB
IB
QDU
DT
DV
TV
TT
td
d
−−−
←←
←
=
∂∂+
∂∂−
∂∂×+
∂∂×+
∂∂
θθωω
ω

37
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Computation of Lagrange Equations in Body Frame (continue – 6)
Summarize
( )
( )
[ ] ( )
[ ]( ) [ ] ( )
( )
( ) ( )
∂∂
∂∂
−
∂∂
∂∂
××
×+
∂∂
∂∂
−
←←
←
←E
I
T
BI
BIB
BC
BIB
B
C
BIB
BIB
BC
T
R
T
D
C
T
V
T
VT
V
T
td
d
θωω
ω
ω
0
00
( )
( )
( )
=
∂∂
∂∂
+−− E
R
IP
T
BI
E
I
T
BI
Q
Q
D
C
U
R
U
D
C
0
0
0
0
θ
See Meirovitch and Kwak [6] and Meirovitch [7].
In the same way, for the elastic modes, we have:
,2,1==∂∂+
∂∂−
∂∂=
∂∂+
∂∂−
∂∂
iQUTT
td
dUTT
td
dEi
iiiiii ηηηηηη
Table of Contents

38
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion
The Translational Lagrange Equations in Body Coordinates are given by:
( ) [ ] ( )( ) ( ) ( )
( )IP
BII
C
BII
C
BIB
C
BIBB
C
QCR
UC
R
TC
V
T
V
T
td
d
=
∂∂+
∂∂−
∂∂×+
∂∂
←ω
Pre-multiplying by will give the Translational Lagrange Equation in
Inertial Frame.
( ) IB
TBI CC =
( ) ( ) ( )( )I
PIC
IC
IC
QR
U
R
T
V
T
td
d =
∂∂+
∂∂−
∂∂
where we used
( ) ( ) [ ] ( )( )
∂∂×+
∂∂=
∂∂
← BC
BIBB
C
IBI
C V
T
V
T
td
dC
V
T
td
d
ω

39
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion (continue – 1)Since the kinetic energy of the system is given by:
( )( ) ( ) ( )
∫ ⋅+∫⋅+∫⋅=tm I
C
I
C
tm I
CC
tmCC md
td
rd
td
rdmd
td
rdVmdVVT ,,,
2
1
2
1
( ) ∑⋅−⋅=openings
iifluidCiopenCCC mrVmVV
,
ˆ2
1IBCIB I ←← ⋅⋅+ ωω
,2
1
( )∑ ⋅⋅+∫ ⋅+ ←←
rotorsBjrotorCrotorjBjrotor
tmFrozenRotors
B
C
FrozenRotorsB
C Imdtd
rd
td
rdωω
,,,
2
1
2
1
∑∞
=
+
1
2
2
1
ii
i Mtd
dη( )
∑ ⋅⋅+∫
×⋅+ ←←←
rotorsBjrotorCrotorjIB
tmFrozenRotors
B
CCIB Imd
td
rdr ωωω
,,
,
we have:
PmrVmV
T
openingsifluidCiopenC
C
=−=
∂∂ ∑ :ˆ
,
This equation gives the Linear Momentum of the system. The same expression was obtained using Simplified Particles and Reynolds’ Theorem Approaches.

40
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion (continue – 2)
we have:
PmrVmV
T
openingsifluidCiopenC
C
=−=
∂∂ ∑ :ˆ
,
This equation gives the derivative of the Linear Momentum of the system. The same expression was obtained using Simplified Particles and Reynolds’ Theorem Approaches if we identify:
∑∑ −−+=
∂∂=
openingsifluidCiopen
openingsifluid
I
CiopenC
I
C
ICI
mrmtd
rdVm
td
Vdm
V
T
td
d
td
Pd
,, ˆ
ˆ
0=
∂∂
CR
T
( )CECE
CE
Earth
C
RgmRR
Rgm
R
U −=−=
∂∂ →
12
2
0
→+=−−+= ∑∑ E
E
EarthP
openingsifluidCiopen
openingsifluid
I
Ciopen
C
I
C
I
RR
RgmQmrm
td
rdVm
td
Vdm
td
Pd1ˆ
ˆ
2
2
0,
,
Substitute those equation in the Lagrange’s Equation:
( ) ( ) ( )( )I
PIC
IC
IC
QR
U
R
T
V
T
td
d =
∂∂+
∂∂−
∂∂
gmQRR
RgmQF PE
E
EarthPext
+=+=
→
∑ 12
2
0

41
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion (continue – 3)
→+=−−+= ∑∑ E
E
EarthP
openingsifluidCiopen
openingsifluid
I
Ciopen
C
I
C
I
RR
RgmQmrm
td
rdVm
td
Vdm
td
Pd1ˆ
ˆ
2
2
0,
,
Substitute:
( )
( )I
openings jjifluid
I
Ciopen
Ci
TiA
I
P Fmtd
rdVmFFQ
++++= ∑ ∑∑∑
,ˆ
in
to obtain
∑∑∑∑∑ +++++=j
jopenings
ifluid
I
Ciopen
openingsifluidCiopen
iTiA
I
C Fmtd
rdmrFFgm
td
Vdm
,
,
ˆˆ2

42
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion (continue – 4)Rotation Equations
The Rotational Lagrange’s equations in Body Coordinates are given by:
( ) [ ] ( )( ) [ ]( )
( ) ( ) ( )( )E
RT
E
T
E
TB
C
B
CBIB
BIBB
IB
QDU
DT
DV
TV
TT
td
d
−−−
←←
←
=
∂∂+
∂∂−
∂∂×+
∂∂×+
∂∂
θθωω
ω
( )( ) ( ) ( )
∫ ⋅+∫⋅+∫⋅=tm I
C
I
C
tm I
CC
tmCC md
td
rd
td
rdmd
td
rdVmdVVT ,,,
2
1
2
1
( ) ∑⋅−⋅=openings
iifluidCiopenCCC mrVmVV
,
ˆ2
1IBCIB I ←← ⋅⋅+ ωω
,2
1
( )∑ ⋅⋅+∫ ⋅+ ←←
rotorsBjrotorCrotorjBjrotor
tmFrozenRotors
B
C
FrozenRotorsB
C Imdtd
rd
td
rdωω
,,,
2
1
2
1
∑∞
=
+
1
2
2
1
ii
i Mtd
dη( )
∑ ⋅⋅+∫
×⋅+ ←←←
rotorsBjrotorCrotorjIB
tmFrozenRotors
B
CCIB Imd
td
rdr ωωω
,,
,
( )C
rotorsBjrotorCrotorj
tm RotorsFrozenB
CCIBC
IB
HImdtd
rdrI
T,,
,,, :
=⋅+
×+⋅=
∂
∂ ∑∫ ←←←
ωωω
Since the kinetic energy of the system is given by:
we obtain

43
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion (continue – 5)Rotation Equations (continue – 1)
( )C
rotorsBjrotorCrotorj
tm RotorsFrozenB
CCIBC
IB
HImdtd
rdrI
T,,
,,, :
=⋅+
×+⋅=
∂
∂ ∑∫ ←←←
ωωω
we obtain
( ) ( )
⋅×+⋅+
××+
×+
⋅×+⋅+⋅=
×+==
∂
∂
∑∑
∫∫
←←←
←
←←←←
←←
rotorsBjrotorCrotorIB
rotorsBjrotorCrotor
tm RotorsFrozenB
CCIB
Btm RotorsFrozen
B
CC
IBCIBIBCIBC
CIB
I
C
I
C
IIB
II
mdtd
rdrmd
td
rdr
dt
d
III
Htd
Hd
td
HdT
td
d
ωωω
ω
ωωωω
ωω
,,
,,
,,
,,,
,,,

44
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion (continue – 6)Rotation Equations (continue – 2)
we obtain
( ) ( ) { }0 =
∂∂=
∂∂
EE
UT
θθ
( ) [ ] ( )( ) [ ] ( )
( ) ( ) ( )
∂∂+
∂∂−
∂∂×+
∂∂×+
∂∂ −−
←←
←E
T
E
TB
C
B
CBIB
BIBB
IB
UD
TD
V
TV
TT
td
d
θθωω
ω
( ) ( ) [ ] ( ) ( )
( ) ( )
( ) [ ] ( ) ( ) [ ]( )( )B
openingsifluidCiopenC
B
C
B
rotorsBjrotorCrotor
BIB
rotors
BBjrotorCrotor
tmRotorsFrozen
B
CCIB
B
tmRotorsFrozen
B
CC
BIBC
BIB
BIBC
BIBC
mrVmVII
mdtd
rdrmd
td
rdr
dt
d
III
∑−×+∑ ⋅×+∑ ⋅+
∫
××+
∫
×+
⋅×+⋅+⋅=
←←←
←
←←←←
,,,
,,
,,
,,,
ˆωωω
ω
ωωωω
( )E
openings kk
jjCj
I
Ciopen
CCiopenifluidi
CTiCA
T MFrtd
rdVrmMMD
+×+
+×++= ∑ ∑∑∑∑−
,
,
,,,
ˆˆ
( )B
openings kk
jjCj
I
Ciopen
CCiopenifluidi
CTiCA MFrtd
rdVrmMM
+×+
+×++= ∑ ∑∑∑∑
,
,
,,,
ˆˆ

45
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion (continue – 7)Rotation Equations (continue – 3)
Finally
( ) ( ) [ ] ( ) ( )
( ) ( )
( ) [ ] ( ) ( )
( ) ( ) ∑∑∑∑∑∑
∫∫
+×++=
⋅×+⋅+
××+
×+
⋅×+⋅+⋅
←←←
←
←←←←
kk
jjCj
i
BCTi
BCA
B
rotorsBjrotorCrotor
BIB
rotors
BBjrotorCrotor
tm RotorsFrozenB
CCIB
Btm RotorsFrozen
B
CC
BIBC
BIB
BIBC
BIBC
MFrMM
II
mdtd
rdrmd
td
rdr
dt
d
III
,,,
,,
,,
,,
,,,
ωωω
ω
ωωωω

46
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion (continue – 8)Elastic Equations
Eiiii
QUTT
td
d =∂∂+
∂∂−
∂∂
ηηη
( )( ) ( ) ( )
∫ ⋅+∫⋅+∫⋅=tm I
C
I
C
tm I
CC
tmCC md
td
rd
td
rdmd
td
rdVmdVVT ,,,
2
1
2
1
( ) ∑⋅−⋅=openings
iifluidCiopenCCC mrVmVV
,
ˆ2
1IBCIB I ←← ⋅⋅+ ωω
,2
1
( )∑ ⋅⋅+∫ ⋅+ ←←
rotorsBjrotorCrotorjBjrotor
tmFrozenRotors
B
C
FrozenRotorsB
C Imdtd
rd
td
rdωω
,,,
2
1
2
1
∑∞
=
+
1
2
2
1
ii
i Mtd
dη( )
∑ ⋅⋅+∫
×⋅+ ←←←
rotorsBjrotorCrotorjIB
tmFrozenRotors
B
CCIB Imd
td
rdr ωωω
,,
,
Since the kinetic energy of the system is given by:
we have
td
dM
T ii
i
ηη
=∂∂
0=∂∂
i
T
η
2
2
td
dM
TT
td
d ii
ii
ηηη
=∂∂−
∂∂
Therefore

47
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Derivation of the Equations of Motion (continue – 9)Elastic Equations (continue – 1)
Eiiii
QUTT
td
d =∂∂+
∂∂−
∂∂
ηηηFrom
∑=∞
=1
22
2
1
iiiie MU ηω
we obtain
iiii
e MU ηωη
2=∂∂
From
( )( ) ( )[ ] ∑∑∫ ×∇⋅+⋅+⋅+−=
∂∂= ∞
kik
jij
Si
i
PEi MFdstfnpp
WQ
W
φφφηδ
δ 11
Therefore
( )[ ] ∑∑∫ ×∇⋅+⋅+⋅+−=
+ ∞
kik
jij
Siii
ii MFdstfnpp
td
dM
W
φφφηωη 112
2
2
Table of Contents

48
SOLOSUMMARY OF EQUATIONS OF MOTION OF
A VARIABLE MASS SYSTEM
( )( )
∑
=∑ ∫∫=∫=
openings
iiopen
openings
i Si
tm td
mdmdmd
td
dtm
iopen
MASS EQUATION
FORCE EQUATION
RIGID-BODY TERMSmVtd
VdCIO
O
C
×+ ←
ω
∑−∑
×+− ←
openings
iiflowiopen
openings
iiflowiopenIO
B
iopen mrmrtd
rd
ˆˆˆ
2 ωFLUID-FLOW TERMS
GRAVITATIONAL, AERODYNAMIC, PROPULSIVE &
∑+∑+=i
TiA FFmg
EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEM
∑+j
jF
DISCRETE TERMS

49
SOLO
SUMMARY OF EQUATIONS OF MOTION OF A VARIABLE MASS (CONTINUE – 1)
MOMENT EQUATIONS RELATIVE TO A REFERENCE POINT O
RIGID-BODY TERMSIOOIOOIOIOO III ←←←← ⋅+⋅×+⋅ ωωωω
,,,
∑ ⋅×+∑ ⋅+ ←←←
jOjrotorCrotorjIO
jOjrotorCrotorj RjRj
II ωωω
,, ROTORS TERMS
( )
( )
∫
××+
∫
×+
←tm
FrozenRotorO
OOIO
O
tmFrozenRotor
O
OO
dmtd
rdr
dmtd
rdr
td
d
,,
,,
ω
BODY FLUIDS, MOVING PARTS, ELASTICITY,… TERMS
FLUID CROSSING OPENINGS TERMS∑
×+×− ←
openings
iiflowOiopenIO
O
OiopenOiopen mr
td
rdr
,
,,
ˆˆ
ˆ ω
AERODYNAMIC & PROPULSIVE
∑+∑=i
OTiOA MM ,,
EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEM
( ) ∑+∑ ×−+k
kj
jOj MFRR DISCRETE FORCES
MOMENTS TERMS
−×+
I
OO td
Vdgc
, NON-CENTROIDAL MOMENTS TERMS

50
SOLO
SUMMARY OF EQUATIONS OF MOTION OF A VARIABLE MASS (CONTINUE – 2)
( )[ ]∫∫∑ +−= ∞
WS
A dstfnppF11: AERODYNAMIC FORCES
( )∫∫ −+
−= ∞iopenS
iflowiopeniflowTi dsnppmVVF
1ˆˆ: THRUST FORCES
( ) ( )[ ]∫∫ +−×−=∑ ∞WS
OOA dstfnppRRM11:,
AERODYNAMIC MOMENTS RELATIVE TO O
( ) ( )[ ]∫∫ −×−+
−×
−= ∞iopenS
OiflowiopeniflowOiopenOTi dsnppRRmVVRRM
1ˆˆˆ:,THRUST MOMENTS
RELATIVE TO O
EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEM
Table of Contents

51
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
References
2. Meirovitch, L., “Method of Applied Dynamics”, John Wiley & Sons, 1986
3. Goldstein, H., “Classical Mechanics”, 1st, 2nd and 3rd Editions
4. Lanczos, C., “The Variational Principles of Mechanics”, 4th Edition, Dover Publications, 1970
5. Meirovitch, L., “General Motion of a Variable-Mass Flexible Rocket with Internal Flow”, J. Spacecraft, Vol. 7, No. 2, Feb. 1970, pp. 186-195
1. Bilmoria, K.D., Schmidt, D.K., “An Integrated Development of the of Motion for Elastic Hypersonic Flight Vehicles”, AIAA-92-4605-CP, and Journal of Guidance, Control and Dynamics, Vol.18, No.1, Jan.-Feb., 1995, pp. 73-81
6. Meirovitch, L., Kwak, M.K., “Dynamics and Control of Spacecraft with Retargeting Flexible Antennas”, Journal of Guidance, Control and Dynamics, Vol.13, No.2, March-April, 1990, pp. 241-248

52
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
References (continue – 1)
7. Meirovitch, L., “State Equation of Motion for Flexible Bodies in Terms of Quasi-Coordinates”, Proceedings of the IUTAM/IFAC Symposium on Dynamics of Controlled Mechanical Systems, Switzerland, May-June 1998
8. Weng, S-L., Greenwood, D.T., “General Dynamical Equations of Motion for Elastic Body Systems”, Journal of Guidance, Control and Dynamics, Vol.15, No.6, Nov.-Dec., 1992, pp. 1434-1442
Table of Contents

53
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations
The generalized coordinates are:
iiii
QUTT
td
d =
∂∂+
∂∂−
∂∂
ξξξ
( ) [ ] Tzyx
ICP RRRR ==
ξ Position components relative to Inertial System in Inertial Coordinates
[ ] TkjiR θθθξ =Γ=
Euler Angles around Euler Axes
[ ] TE
4321 ηηηηηξ == Elastic Modes
We want to obtain the Lagrange Equations in Body Coordinates.
( ) ( )wTT ,, ξξξ = Kinetic Energy of the System
( )ξU Potential Energy of the System
kQ Generalized Forces along the Degrees of Freedom Axes
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )( ) ( ) ( ) ( ) ( )( )ηωηθηωθηθηθηθ
,,,,,,,,,,,,,,, 1 B
B
B
B
EIB
B
B
B
ETEIEIEI VRTDVCRTRRT ==
−
{ } { }ηθηηθθθξ ,,,,,,,,,,: 21321TTT
zyx RRRR
==
{ } { }ηωηη ,,,,,,,,,,: 21T
BT
BT Vrqpwvuw ==

54
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
The angular velocity vector of rotation of the Body frame relative to Inertia frame is:
kIjIntriBIB kji θθθω ˆˆˆ ++=← In Body frame this is:
( ) ( ) ( ) ( ) ( ) [ ] ( ) [ ] [ ] ( )k
IIjjiij
IntrIntriii
BBk
BIj
BIntri
BB
BIB kjikji θθθθθθθθθω ˆˆˆˆˆˆ ++=++=←
[ ] ( ) [ ] ( ) [ ] [ ] ( )[ ] { } { } { }[ ]
=
=
=←
k
j
i
k
j
i
IIjjii
IntrIntrii
BB
BIB DDDkji
r
q
p
θ
θ
θ
θ
θ
θ
θθθω
321ˆˆˆ:
{ } ( ) ( ){ } ( ) [ ] ( ) ( ){ } ( ) [ ] [ ] ( )
{ } { } { }[ ]321
321
:
ˆˆ:,&ˆˆ:&ˆ:
DDDD
kkDjjDconstiD IIjjii
BIji
IntrIntrii
BIntri
BB
=
======→
θθθθθθ
( ) [ ] [ ] ( ) { } { } { }[ ]
=
==
=
=←
k
j
i
k
j
i
E
k
j
i
BIB DDD
DDD
DDD
DDD
DD
r
q
p
θ
θ
θ
θ
θ
θ
θ
θ
θ
θ
ω
321
333231
232221
131211
:
where:
or
Appendix A: Lagrange Equations (continue – 1)

55
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 2)
( ) ( ) ( )( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )( )
( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )
∂∂
∂∂
∂∂
=
∂∂
∂∂
∂∂
=
∂∂
∂∂
∂∂
−
−
−
z
BB
BB
EI
y
BB
BB
EI
x
BB
BB
EI
z
BB
EBB
ETEI
y
BB
EBB
ETEI
x
BB
EBB
ETEI
z
y
x
R
VRT
R
VRT
R
VRT
R
DVCRT
R
DVCRT
R
DVCRT
R
T
R
T
R
T
ηωηθ
ηωηθ
ηωηθ
ηωθθηθ
ηωθθηθ
ηωθθηθ
,,,,,
,,,,,
,,,,,
,,,,,
,,,,,
,,,,,
1
1
1
∂∂∂∂∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
=
w
T
v
T
u
T
R
w
R
v
R
u
R
w
R
v
R
u
R
w
R
v
R
u
w
T
R
w
v
T
R
v
u
T
R
u
w
T
R
w
v
T
R
v
u
T
R
u
w
T
R
w
v
T
R
v
u
T
R
u
zzz
yyy
xxx
zzz
yyy
xxx
We have:
In a shorthand notation form:
( )
( )
( ) ( )( )( ) ( )
∂∂=
∂∂
∂
∂=
∂
∂B
B
ETB
BI
BB
I V
TC
V
T
R
V
R
T
θ
( ) [ ] ( )
==
=
=
Cz
Cy
Cx
IC
Cz
Cy
Cx
BI
BC
R
R
R
CCC
CCC
CCC
RC
R
R
R
C
w
v
u
V
333231
232221
131211
:

56
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 3)
also:
In a shorthand notation form:
( ) ( ) ( )( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )( )
( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )
∂∂
∂∂
∂∂
=
∂∂
∂∂
∂∂
=
∂∂
∂∂∂∂
−
−
−
k
BB
BB
EI
j
BB
BB
EI
i
BB
BB
EI
k
BB
EBB
ETEI
j
BB
EBB
ETEI
i
BB
EBB
ETEI
k
j
i
VRT
VRT
VRT
DVCRT
DVCRT
DVCRT
T
T
T
θηωηθ
θηωηθ
θηωηθ
θηωθηθθ
θηωθηθθ
θηωθηθθ
θ
θ
θ
,,,,,
,,,,,
,,,,,
,,,,,
,,,,,
,,,,,
1
1
1
∂∂∂∂∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
=
r
T
q
T
p
T
rqp
rqp
rqp
r
Tr
q
Tq
p
Tp
r
Tr
q
Tq
p
Tp
r
Tr
q
Tq
p
Tp
kkk
jjj
iii
kkk
jjj
iii
θθθ
θθθ
θθθ
θθθ
θθθ
θθθ
( )
( )
( ) ( )( )( ) ( )
∂∂=
∂∂
∂
∂=
∂
∂
←←
←B
IB
ETB
IBE
BIB
E
TD
TT
ωθ
ωθ
ω
θ

57
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 4)
In the same way:
In a shorthand notation form:
( ) ( ) ( )( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )( )
∂∂
∂∂∂∂
=
∂∂
∂∂
∂∂
=
∂∂
∂∂
∂∂
−
−
−
z
y
x
z
BB
EBB
ETEI
y
BB
EBB
ETEI
x
BB
EBB
ETEI
z
y
x
R
T
R
T
R
T
R
DVCRT
R
DVCRT
R
DVCRT
R
T
R
T
R
T
ηωθθηθ
ηωθθηθ
ηωθθηθ
,,,,,
,,,,,
,,,,,
1
1
1
( ) ( )
∂∂=
∂∂
II R
T
R
T

58
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 5)
and:( ) ( ) ( )( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )( )( ) ( ) ( )( ) ( ) ( )( ) ( )( )
( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )
∂∂
∂∂
∂∂
=
∂∂
∂∂
∂∂
=
∂∂∂∂∂∂
−
−
−
k
B
B
B
B
EI
j
B
B
B
B
EI
i
B
B
B
BEI
j
B
B
EB
B
ETEI
j
B
B
EB
B
ETEI
i
B
BEB
BETEI
k
j
i
VRT
VRT
VRT
DVCRT
DVCRT
DVCRT
T
T
T
θηωηθ
θηωηθ
θηωηθ
θηωθθηθ
θηωθθηθ
θηωθθηθ
θ
θ
θ
,,,,,
,,,,,
,,,,,
,,,,,
,,,,,
,,,,,
1
1
1
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
+
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
+
∂∂
∂∂∂∂
=
r
Tr
q
Tq
p
Tp
r
Tr
q
Tq
p
Tp
r
Tr
q
Tq
p
Tp
w
Tw
v
Tv
u
Tu
w
Tw
v
Tv
u
Tu
w
Tw
v
Tv
u
Tu
T
T
T
kkk
jjj
iii
kkk
jjj
iii
k
j
i
θθθ
θθθ
θθθ
θθθ
θθθ
θθθ
θ
θ
θ
( ){ }( )
( ){ }( )
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
+
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
+
∂∂
∂∂
∂∂
=
∂∂
∂∂
→
r
T
q
T
p
T
rqp
rqp
rqp
w
T
v
T
u
T
wvu
wvu
wvu
T
T
T
E
TBIB
E
TBBV
θω
θ
θθθ
θθθ
θθθ
θθθ
θθθ
θθθ
θ
θ
θ
333
222
111
333
222
111
3
2
1

59
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 6)
∂∂
+∂∂+
∂∂
∂∂
+∂∂+
∂∂
∂∂
+∂∂
+∂∂
∂∂
+∂∂
+∂∂
∂∂
+∂
∂+
∂∂
∂∂
+∂
∂+
∂∂
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
zk
yk
xk
zk
yk
xk
zj
yj
xj
zj
yj
xj
zi
yi
xi
zi
yi
xi
kkk
jjj
iii
RC
RC
RC
RC
RC
RC
RC
RC
RC
RC
RC
RC
RC
RC
RC
RC
RC
RC
wvu
wvu
wvu
θθθθθθ
θθθθθθ
θθθθθθ
θθθ
θθθ
θθθ
232221131211
232221131211
232221131211
∂∂
+∂∂
+∂∂
∂∂
+∂∂
+∂∂
∂∂
+∂
∂+
∂∂
zk
yk
xk
zj
yj
xj
zi
yi
xi
RC
RC
RC
RC
RC
RC
RC
RC
RC
θθθ
θθθ
θθθ
333231
333231
333231
( ){ }( )
( ){ }( ){ }( ){ }
{ }{ }{ }
{ } [ ][ ]
{ } [ ][ ]
{ } [ ][ ]
{ } [ ]
{ } [ ]
{ } [ ]
( ){ } [ ]( ){ } [ ]( ){ } [ ]
[ ] [ ] [ ][ ] ( )( ) [ ] ( )( ) TB
B
TB
B
TTB
B
TTB
B
TTB
B
TTT
I
TTT
I
TTT
I
TT
I
TT
I
TT
I
T
k
T
I
T
j
T
I
T
i
T
I
k
TB
B
j
TB
B
i
TB
B
E
TB
B VDVDDD
DV
DV
DV
DCR
DCR
DCR
CDR
CDR
CDR
CR
CR
CR
V
V
V
V
×−=×××−=
×−
×−
×−
=
×−
×−
×−
=
×−
×−
×−
=
∂∂
∂∂
∂∂
=
∂∂
∂∂
∂∂
=∂
∂321
3
2
1
3
2
1
3
2
1
θ
θ
θ
θ
θ
θ
θ
In a shorthand notation form:
[ ] ( )( ) [ ] ( )( ) [ ] ( )BB
TTBB
TTBB VDVDDV ×−=×=×=
and( ){ }
( )
( ){ }( ){ }( ){ }
∂∂
∂∂
∂∂
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=∂
∂
→
→
→
→
k
TB
IB
j
TB
IB
i
TB
IB
kkk
jjj
iii
E
TB
IB
rqp
rqp
rqp
θω
θω
θω
θθθ
θθθ
θθθ
θω

60
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
( ){ }( )
( ){ }( )
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
+
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
+
∂∂
∂∂
∂∂
=
∂∂∂∂∂∂
∂∂
∂∂
→
r
T
q
T
p
T
rqp
rqp
rqp
w
T
v
T
u
T
wvu
wvu
wvu
T
T
T
T
T
T
E
TBIB
E
TBBV
k
j
i
θω
θ
θθθ
θθθ
θθθ
θθθ
θθθ
θθθ
θ
θ
θ
θ
θ
θ
333
222
111
333
222
111
3
2
1
Appendix A: Lagrange Equations (continue – 7)
( ){ }( ) [ ] ( )( ) [ ] ( )( ) [ ] ( )B
B
TTB
B
TTB
BE
TB
B VDVDDVV ×−=×=×=∂
∂
θ
We found
( ){ }( )
( ){ }( ){ }( ){ }
∂∂
∂∂
∂∂
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=∂
∂
→
→
→
→
k
TB
IB
j
TB
IB
i
TB
IB
kkk
jjj
iii
E
TB
IB
rqp
rqp
rqp
θω
θω
θω
θθθ
θθθ
θθθ
θω
[ ] ( )
( ){ }( ){ }( ){ }
∂∂∂∂∂∂
∂∂
∂∂
∂∂
+
∂∂∂∂∂∂
×−
∂∂
∂∂∂∂
=
∂∂
∂∂∂∂
→
→
→
r
T
q
T
p
T
w
T
v
T
u
T
VD
T
T
T
T
T
T
k
TBIB
j
TBIB
i
TBIB
BB
T
k
j
i
k
j
i
θω
θω
θω
θ
θ
θ
θ
θ
θ
In a shorthand notation form: ( ) ( ) [ ] ( )( )
( ){ }( ) ( )
∂∂
∂∂
+
∂∂×−
∂∂=
∂∂
←
→B
IBE
TB
IB
B
B
B
B
T
EE
T
V
TVD
TT
ωθω
θθ

61
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 8)
( ) ( )
∂∂=
∂∂
II R
T
R
T( )
( )
( ) ( )( )( ) ( )
∂∂=
∂∂
∂
∂=
∂
∂B
B
ETB
BI
BB
I V
TC
V
T
R
V
R
T
θUsing and
[ ] [ ] ( )I
P
II
B
B
TB
I
B
B
TB
I
III
QR
U
R
T
V
T
td
Cd
V
T
td
dC
R
U
R
T
R
T
td
d
=
∂∂+
∂∂−
∂∂+
∂∂=
∂∂+
∂∂−
∂
∂we obtain
Using
( ) ( ) [ ] ( )( )
( ){ }( ) ( )
∂∂
∂∂
+
∂∂×−
∂∂=
∂∂
←
→B
IBE
TBIB
BB
BB
T
EE
T
V
TVD
TT
ωθω
θθ
( )
( )
( ) ( )( )( ) ( )
∂∂=
∂∂
∂
∂=
∂
∂
←←
←B
IB
ETB
IBE
BIB
E
TD
TT
ωθ
ωθ
ω
θ
and
we obtain
( ) ( ) ( )
∂∂+
∂∂−
∂
∂EEE
UTT
td
d
θθθ
( ) ( ) ( ) ( ) [ ] ( )( )
( ){ }( ) ( )
( )E
RB
IBE
TB
IB
B
B
B
B
T
EEB
IB
T
B
IB
T QT
V
TVD
UTT
td
DdT
td
dD
=
∂∂
∂∂
−
∂∂×+
∂∂+
∂∂−
∂∂+
∂∂=
←
→
←← ωθω
θθωω

62
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 9)
Computations of and td
Dd T ( ){ }( )E
TBIB
θω
∂∂ →
Basic Euler Rotations
The three basic Euler rotations, around the axes are described by the Rotation Matrices:
,3,2,1
[ ]
−=
11
1111
0
0
001
:
θθθθθ
cs
sc [ ]
−=
22
22
22
0
010
0
:
θθ
θθθ
cs
sc
[ ]
−=
100
0
0
: 33
33
33 θθθθ
θ cs
sc
Let differentiate with respect to Euler Angles.
[ ] [ ] [ ] 11
11
11
11
11
11
11
11
11 1
0
0
001
010
100
000
0
0
000
0
0
001
θθθθθ
θθθθ
θθθθ
θθθ ×−=
−
−=
−−−=
−=
cs
sc
sc
cs
cs
scd
d
d
d
[ ] [ ] [ ] 22
22
22
22
22
22
22
22
22 2
0
010
0
001
000
100
0
000
0
0
010
0
θθθ
θθ
θθ
θθ
θθ
θθ
θθθ
×−=
−
−=
−
−−=
−=
cs
sc
sc
cs
cs
sc
d
d
d
d
[ ] [ ] [ ] 3333
33
33
33
33
33
33
33 3
100
0
0
000
001
010
000
0
0
100
0
0
θθθθθ
θθθθ
θθθθ
θθθ
×−=
−
−=
−−
−=
−= cs
sc
sc
cs
cs
sc
d
d
d
d

63
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Table of Contents
Appendix A: Lagrange Equations (continue – 10)
Computations of and td
Dd T ( ){ }( )E
TBIB
θω
∂∂ →
Basic Euler Rotations (continue – 1)
is the matrix representation of the cross product of the vector ; i.e. in Cartesian coordinates :
[ ]×A
A
( )zyx 1,1,1
( ) ( )zzyyxxzzyyxx BBBAAABA 111111 ++×++=×
( ) ( ) ( ) zxyyxyxzzxxyzzy
zyx
zyx
zyx
BABABABABABA
BBB
AAA 111
111
−+−+−=
=
[ ] ( ) { } ( )zyxzyx
z
y
x
xy
xz
yz
BA
B
B
B
AA
AA
AA,,,,:
0
0
0
×=
−−
−
=
The matrix is skew-symmetric; i.e.:[ ]×A [ ] [ ]×−=× AA
T
[ ] [ ] [ ] [ ] 11111
1111 1 θθθθ
θθ ×−==d
d
td
d
[ ] [ ] [ ] [ ] 22222
2222 2 θθθθ
θθ ×−==d
d
td
d
[ ] [ ] [ ] [ ] 33333
3333 3 θθθθ
θθ ×−==d
d
td
d

64
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 11)
Computations oftd
Dd T
=
td
Dd
td
Dd
td
Dd
td
Dd 321
++++++= k
kj
ji
ik
kj
ji
ik
kj
ji
i d
Dd
d
Dd
d
Dd
d
Dd
d
Dd
d
Dd
d
Dd
d
Dd
d
Dd θθ
θθ
θθ
θθ
θθ
θθ
θθ
θθ
θθ
333222111
{ } ( )
( ){ } ( ) [ ] ( )
( ){ } ( ) [ ] [ ] ( )
{ } { } { }[ ]321
3
2
1
:
ˆˆ:,
ˆˆ:
ˆ:
DDDD
kkD
jjD
constiD
IIjjii
BIji
IntrIntrii
BIntri
BB
=
==
==
==→
θθθθ
θθFrom
0111 =∂∂
=∂∂
=∂∂
kji
DDD
θθθ
Using those equations, and
[ ] [ ] ( ) [ ] 0ˆ 22211
2 =∂∂
=∂∂
×−=×−=∂∂
kj
IntrIntrii
i
DDDDjD
D
θθθ
θ
[ ] [ ] [ ] ( ) [ ]
[ ] [ ] ( ) [ ] ( ) [ ] [ ] ( ) [ ] [ ] [ ] ( )
[ ] ( ) [ ] [ ] ( ) [ ]
=∂∂
×−=×−=
−×−=×−=∂∂
×−=×−=∂∂
0
ˆˆ
ˆˆˆˆ
ˆ
3
32
3
3113
k
IIjjii
BIntr
IIjjiiii
Intr
IntriiI
IjjIntr
Intriij
IIjjii
i
D
DDkj
kjkjD
DDkDD
θ
θθ
θθθθθθθ
θθθ
01111 =∂∂
+∂∂
+∂∂
= kk
jj
ii
DDD
td
Dd θθ
θθ
θθ
[ ] i
k
k
j
j
i
i
DD
DDD
td
Dd
θ
θθ
θθ
θθ
21
2222
×−=
∂∂
+∂∂
+∂∂
=
[ ] [ ] ji
k
k
j
j
i
i
DDDD
DDD
td
Dd
θθ
θθ
θθ
θθ
3231
3333
×−×−=
∂∂
+∂∂
+∂∂
=

65
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Table of Contents
Appendix A: Lagrange Equations (continue – 12)
Computations oftd
Dd T
[ ] [ ] jik
k
j
j
i
i
DDDDDDD
td
Dd θθθθ
θθ
θθ
32313333 ×−×−=
∂∂
+∂∂
+∂∂
=
[ ] ik
k
j
j
i
i
DDDDD
td
Dd θθθ
θθ
θθ
212222 ×−=
∂∂+
∂∂+
∂∂=
01111 =∂∂
+∂∂
+∂∂
= kk
jj
ii
DDD
td
Dd θθ
θθ
θθ
We found:
Therefore:
01 =td
Dd T
[ ] iT
T
DDtd
Dd θ
×= 122
[ ] [ ] jT
iT
T
DDDDtd
Ddθθ
×+×= 23133

66
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 13)
Computations of( ){ }
( )E
TBIB
θω
∂∂ →
By differentiating [ ] { } { } { }[ ]
=←
k
j
i
BIB DDD
θ
θ
θ
ω
321
we obtain:
( )[ ] [ ][ ]
[ ] [ ] [ ] [ ] kjkj
k
j
i
k
j
i
iiii
BIB
DDDDDDDD
DDDDDDD
θθθθ
θ
θθ
θ
θθ
θθθθω
13123121
3121321 0
×+×=×−×−=
×−×−=
∂∂
∂∂
∂∂=
∂∂ ←
( ) [ ][ ]
[ ] [ ] kk
k
j
i
k
j
i
jjjj
B
IB
DDDD
DDDDD
θθ
θ
θ
θ
θ
θ
θ
θθθθω
2332
32321 00
×=×−=
×−=
∂∂
∂∂
∂∂
=∂
∂ ←
( )[ ] 0000321
=
=
∂∂
∂∂
∂∂
=∂
∂ ←
k
j
i
k
j
i
kkkk
BIB DDD
θ
θ
θ
θ
θ
θ
θθθθω
( ){ } [ ] [ ]{ }[ ] [ ] k
T
j
T
T
kj
i
TB
IB
DDDD
DDDD
θθ
θθθ
ω
×−×−=
×+×=∂
∂ ←
3121
1312
( ){ } [ ]{ } [ ] kTT
kj
TBIB DDDD θθ
θω
×−=×=∂
∂ ←3223
( ){ }0
=∂
∂ ←
k
TBIB
θω

67
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Table of Contents
Appendix A: Lagrange Equations (continue – 14)
Computations of [ ] ( )B
IB
TD ×→ω
Since we have[ ] [ ] { }( ) 0
≡×=× Tlll
Tl DDDD
[ ] [ ]{ }{ }{ }
[ ] [ ] [ ]( )kji
T
T
T
BIB
T DDD
D
D
D
D θθθω ×+×+×
=×← 321
3
2
1
[ ] [ ]
[ ] [ ]
[ ] [ ]
×+×
×+×
×+×
=
jT
iT
kT
iT
kT
jT
DDDD
DDDD
DDDD
θθ
θθ
θθ
2313
3212
3121
Computations of and td
Dd T ( ){ }( )E
TBIB
θω
∂∂ →

68
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Appendix A: Lagrange Equations (continue – 15)
Computations of( ){ }
( ) [ ] ( )B
IB
T
E
TB
IB D ×+∂
∂→
→ ωθ
ω
Let add and and compare with ( ){ }
( )E
TBIB
θω∂
∂ ←
[ ] ( )BIB
TD ×←ω td
Dd T
Computations of and td
Dd T ( ){ }( )E
TBIB
θω
∂∂ →
( ){ } [ ] ( )td
DdD
TB
IBT
i
TBIB 1
1 0 ==×+∂
∂←
←
ωθ
ω
( ){ } [ ] ( ) [ ]td
DdDDD
T
iTB
IBT
j
TBIB 2
122 =×=×+∂
∂←
← θωθ
ω
( ){ } [ ] ( ) [ ] [ ]td
DdDDDDD
T
jT
iTB
IBT
k
TBIB 3
23133 =×+×=×+∂
∂←
← θθωθ
ω
or( ){ }
( ) [ ] ( )BIB
T
E
TBIB
T
Dtd
Dd×+
∂∂
= ←← ω
θω

69
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
[ ] [ ] [ ] kkjjii
B
IC θθθ=
Appendix A: Lagrange Equations (continue – 16)
Computations oftd
Cd B
I
[ ] [ ] [ ] iiiBii i
td
d θθθ ×−= ˆ
[ ] [ ] [ ] jjjr
jj jtd
dθθ
θ ×−= intˆ
[ ] [ ] [ ] kkkIkk k
td
d θθθ ×−= ˆ
we can compute
[ ] [ ] [ ] [ ] [ ] ( ) [ ] [ ] [ ] [ ] ( ) [ ] BI
BI
B
Bkkjjii
B
Bkkjjiiii
BI CDCii
d
dC×−=×−=×−=
=
∂∂
1ˆˆ θθθθθθ
θθ
[ ] [ ] [ ] [ ] [ ] [ ] ( ) [ ] [ ] kkjj
Intr
Intriikkjjj
iij
BI j
d
dC θθθθθθ
θθ
×−=
=
∂∂ ˆ
[ ] [ ] ( ) [ ] [ ] [ ] [ ] [ ] ( ) [ ] [ ] [ ] [ ] ( ) [ ] B
I
B
I
B
Intrkkjjii
B
Intrkkjjiiii
Intr
Intrii CDCjjj ×−=×−=×−=−×−= 2ˆˆˆ θθθθθθθθ
[ ] [ ] [ ] [ ] [ ] [ ] [ ] ( ) [ ] kk
I
Ijjiikkk
jjiik
BI k
d
dC θθθθθ
θθθ
×−=
=
∂∂ ˆ
[ ] [ ] [ ] ( ) [ ] [ ] [ ] [ ] [ ] [ ] ( ) [ ] BI
BI
B
Ikkjjiiiijj
I
Ijjii CDCkk ×−=×−=−−×−= 3ˆˆ θθθθθθθ
where are the unit vectors along the three consecutive Euler axes of rotations (in Body, Intermediate and Inertial coordinates).
IIntrB kji ˆ,ˆ,ˆ
we found:

70
SOLO EQUATIONS OF MOTION OF A VARIABLE MASS SYSTEMLAGRANGIAN APPROACH
Table of Contents
Appendix A: Lagrange Equations (continue – 17)
Computations oftd
Cd B
I
we can compute
[ ] [ ] B
I
i
B
I CDC ×−=
∂∂
1θ
[ ] [ ] B
I
j
B
I CDC ×−=
∂∂
2θ
[ ] [ ] B
I
k
B
I CDC ×−=
∂∂
3θ
[ ] [ ] [ ] [ ]k
k
BI
jj
BI
ii
BI
BI CCC
td
Cd θθ
θθ
θθ
∂
∂+
∂∂
+∂
∂=
[ ] [ ] [ ] kB
IjB
IiB
I CDCDCD θθθ ×−×−×−= 321
[ ] [ ] [ ]( ) [ ] ( ) B
I
B
IB
B
Ikji CCDDD ×−=×+×+×−= ←ωθθθ
321
therefore [ ] [ ] ( ) B
I
B
IB
B
I Ctd
Cd×−= ←ω
[ ] ( ) [ ]×−=∂
∂1DC
C TBI
i
BI
θ
[ ] ( ) [ ]×−=∂
∂2DC
C TBI
j
BI
θ
[ ] ( ) [ ]×−=∂
∂k
TBI
k
BI DC
C
θ

January 5, 2015 71
SOLO
TechnionIsraeli Institute of Technology
1964 – 1968 BSc EE1968 – 1971 MSc EE
Israeli Air Force1970 – 1974
RAFAELIsraeli Armament Development Authority
1974 –2013
Stanford University1983 – 1986 PhD AA