Engineering Design of On-Track Machines in Running Mode Iss 5.pdf · of 25 Railway Group Standard...
25
Railway Group Standard GM/RT2400 Issue Five Date September 2013 Engineering Design of On-Track Machines in Running Mode Synopsis This document mandates requirements for the design of on-track machines in running mode. Copyright in the Railway Group Standards is owned by Rail Safety and Standards Board Limited. All rights are hereby reserved. No Railway Group Standard (in whole or in part) may be reproduced, stored in a retrieval system, or transmitted, in any form or means, without the prior written permission of Rail Safety and Standards Board Limited, or as expressly permitted by law. RSSB Members are granted copyright licence in accordance with the Constitution Agreement relating to Rail Safety and Standards Board Limited. In circumstances where Rail Safety and Standards Board Limited has granted a particular person or organisation permission to copy extracts from Railway Group Standards, Rail Safety and Standards Board Limited accepts no responsibility for, nor any liability in connection with, the use of such extracts, or any claims arising therefrom. This disclaimer applies to all forms of media in which extracts from Railway Group Standards may be reproduced. Published by: RSSB Block 2 Angel Square 1 Torrens Street London EC1V 1NY © Copyright 2013 Rail Safety and Standards Board Limited Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Transcript of Engineering Design of On-Track Machines in Running Mode Iss 5.pdf · of 25 Railway Group Standard...
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design ofOn-Track Machines inRunning Mode
Synopsis
This document mandates requirementsfor the design of on-track machines inrunning mode.
Copyright in the Railway Group Standards is owned byRail Safety and Standards Board Limited. All rights arehereby reserved. No Railway Group Standard (in wholeor in part) may be reproduced, stored in a retrievalsystem, or transmitted, in any form or means, without theprior written permission of Rail Safety and StandardsBoard Limited, or as expressly permitted by law.
RSSB Members are granted copyright licence inaccordance with the Constitution Agreement relating toRail Safety and Standards Board Limited.
In circumstances where Rail Safety and Standards BoardLimited has granted a particular person or organisationpermission to copy extracts from Railway GroupStandards, Rail Safety and Standards Board Limitedaccepts no responsibility for, nor any liability in connectionwith, the use of such extracts, or any claims arisingtherefrom. This disclaimer applies to all forms of media inwhich extracts from Railway Group Standards may bereproduced.
Published by:
RSSBBlock 2Angel Square1 Torrens StreetLondonEC1V 1NY
© Copyright 2013Rail Safety and Standards Board Limited
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 2 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Issue record
Issue Date Comments
One January 1996 Original document
Two December 2002 Replaces issue one
Three December 2010 Replaces issue two
Includes requirements for on-track machines previouslycontained in GM/RT2100 issue three
Four September 2011 Replaces issue three
Small scale change amendment – revision of 3.6 to alignwith the requirements in BS EN 14033.
Five September 2013 Replaces GM/RT2400, issue four, GM/RT2476, issue oneGM/GN2575 issue two and GM/GN2576 issue one
Document aligned with Conventional Rail Locomotives andPassenger Technical Specification for Interoperability(CR LOC & PAS TSI) and BS EN 14033 series. Allrequirements for on-track machines in running mode arenow contained within this document or with specificreferences to other documents.
Revisions have not been marked by a vertical black line in this issue because thedocument has been revised throughout.
Superseded documentsThe following Railway Group documents are superseded, either in whole or in part asindicated:
Superseded documents Sectionssuperseded
Date whensections aresuperseded
GM/RT2400 issue four, September 2011
Engineering Design of On-Track Machines
All December 2013
GM/RT2476 issue one, August 2003
On-Track Machine Requirements for Demonstratingthe Reliable Operation of Track Circuits
All December 2013
GM/GN2575 issue two, June 2004
Guidance on the Engineering Acceptance ofOn-Track Machines
All December 2013
GM/GN2576 issue one, August 2003
Guidance on Vehicle Requirements for ReliableTrack Circuit Operation
All December 2013
GM/RT2400 issue four, GM/RT2476 issue one GM/GN2575 issue two and GM/GN2576issue one cease to be in force and are withdrawn as of 07 December 2013.
SupplyThe authoritative version of this document is available at www.rgsonline.co.uk.Uncontrolled copies of this document can be obtained from Communications, RSSB,Block 2, Angel Square, 1 Torrens Street, London EC1V 1NY, telephone 020 3142 5400 ore-mail [email protected]. Other Standards and associated documents can also beviewed at www.rgsonline.co.uk.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 3 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Contents
Section Description Page
Part 1 Purpose and Introduction 41.1 Purpose 41.2 Introduction 41.3 Approval and authorisation of this document 5
Part 2 Design Requirements for On-track Machines 62.1 Structure and mechanical parts 62.2 Track interaction and gauging 82.3 Braking 102.4 Environmental conditions and aerodynamic effects 102.5 External lights and visible and audible warning devices 112.6 Traction and electrical equipment 112.7 Driver's cab and driver-machine interface 122.8 Fire safety and evacuation 142.9 Design for rescue purposes 142.10 Marking and registration 142.11 Demountable modules 15
Part 3 Documentation 163.1 Maintenance 163.2 Operating instructions 16
Part 4 Application of this document 174.1 Application - infrastructure managers 174.2 Application - railway undertakings 174.3 Health and safety responsibilities 17
AppendicesAppendix A Track Twist Geometry 18Appendix B Obstacle Deflectors 19Appendix C List of Railway Group Standards for which On-Track Machines are
removed from scope 21
Definitions 22
References 23
Figures
Figure 1 Exhaust outlet 12Figure 2 Track twist geometry 18
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 4 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Part 1 Purpose and Introduction
1.1 Purpose
1.1.1 This document mandates requirements for the design of on-track machines whenthey are in running mode.
1.1.2 This document is the national technical rule (NTR), which is able to be used as analternative standard instead of the CR LOC & PAS TSI as permitted by theCR LOC & PAS TSI clause 7.1.1.3.
1.2 Introduction1.2.1 Background
1.2.1.1 The production of GM/RT2400 issue five takes into account the TechnicalSpecifications for Interoperability (TSI) and Euronorms (ENs). GM/RT2400 hasbeen rewritten using the headings set out in the CR LOC & PAS TSI andmandates the requirements of BS EN 14033-1:2011,BS EN 14033-2:2008+A1:2011 and BS EN 14033-3:2009+A1:2011 and anumber of other ENs.
1.2.1.2 Where ENs are considered complete and a suitable substitute for Railway GroupStandards, reference to the EN is made.
1.2.2 Principles
1.2.2.1 The requirements of this document are based on one of the following principles:
a) All new on-track machines are manufactured in compliance with theCR LOC & PAS TSI for running mode.
Or
b) The new on-track machine is designed to this standard as permitted byCR LOC & PAS TSI clause 7.1.1.3.
1.2.2.2 Notwithstanding the stated scope of other Railway Group Standards (seeAppendix C), this document provides all the necessary technical requirements forthe design of on-track machines.
1.2.3 Related requirements in other documents
1.2.3.1 On-track machines are out of scope of all RGSs except for RGSs explicitlymandated in this document. For information, Appendix C sets out a list of theRGSs for which on-track machines are removed from scope following thecompliance date of this standard.
1.2.3.2 The following RGS, which describe processes, remain applicable to on-trackmachines as the situation arises:
GE/RT8106 Management of Safety Related Control, Command andSignalling (CCS) System Failures
GE/RT8250 Reporting High Risk Defects
GE/RT8270 Assessment of Compatibility of Rolling Stock andInfrastructure
GM/RT2273 Post Incident and Post Accident Testing of Rail Vehicles
1.2.4 Supporting documents
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 5 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
1.2.4.1 The following Rail Industry Standard complements this Railway Group Standard:
RIS-1702-PLT Rail Industry Standard for the Design of On-track Machines inWorking and Travelling Modes
1.3 Approval and authorisation of this document
1.3.1 The content of this document was approved by Plant Standards Committee on12 June 2013 and Rolling Stock Standards Committee on 28 June 2013.
1.3.2 This document was authorised by RSSB on 23 July 2013.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 6 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Part 2 Design Requirements for On-track Machines
2.1 Structure and mechanical parts2.1.1 Mechanical interfaces
2.1.1.1 The intention of section 2.1.1 of this document is that the end coupling system ofon-track machines, where fitted, is designed to transmit, safely and withoutsuffering significant permanent deformation all sustained and shock loads thatarise between it and other rail vehicles, including on-track machines associatedwith:
a) Coupling and uncoupling.
b) Traction and braking.
c) Traversing curved track.
d) Vertical changes in alignment.
e) Shock loads caused by play and flexibility in the train coupling, drawgearand buffers, if fitted.
2.1.1.2 The coupling system, with the exception of buffers, shall engage positively withthe coupling system of any rail vehicle to which it is intended to couple.
2.1.1.3 The design of the system shall ensure that it is possible to determine that thecoupling systems are positively engaged, either directly or by a suitable system ofindication.
2.1.1.4 Except as set out in 2.1.1.5 of this document, the coupling systems, with theexception of buffers, shall be designed to remain positively engaged over thelimiting values for track features set out below, for each feature separately:
a) Minimum horizontal track radius of 80 m.
b) Minimum horizontal track reverse radii each of 80 m with a 3 m intermediatestraight.
c) Minimum vertical track radius, concave and convex of 500 m.
d) Maximum installed cant of 200 mm.
e) Maximum cant gradient of 1 in 400.
f) Maximum track twist as set out in Appendix A.
2.1.1.5 Where an on-track machine is unable to meet the limiting values set out in 2.1.1.4of this document, the limitation(s) shall be stated in the operating instructions, asset out in Part 3.
2.1.1.6 The limiting value of track features that coupling and uncoupling is possible forthe particular on-track machine shall be stated in the operating instructions.
2.1.1.7 Systems that control the operation of the coupling or uncoupling system shall beprotected from reasonably foreseeable interference that could result in thesystem's inadvertent or malicious operation.
2.1.1.8 The design of the coupling system shall allow manual uncoupling of the couplingsystem when the systems normally required for uncoupling are unavailable.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 7 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
2.1.1.9 Drawgear and its attachments to an on-track machine body shall be designed tofail at a lower tensile load than that for the primary structure of the machine.
2.1.1.10 Drawgear designed to be capable of transferring shear forces between adjacentvehicles shall withstand, without significant permanent deformation, the transferof 100 kN in both the vertical and transverse directions simultaneously.
2.1.1.11 Inner couplings between different on-track machines of a fixed formation trainshall be designed to withstand the forces due to the intended operatingconditions, as stated in the operating instructions, see Part 3 of this document.
2.1.1.12 If vehicles of an on-track machine are permanently coupled together, the couplingsystems between the vehicles shall be designed to withstand forces greater thanthe couplings and buffers at the ends of the on-track machine.
2.1.1.13 For articulated on-track machines, the joint between two parts of a machine whichshare the same running gear shall comply with the requirements ofBS EN 12663-1:2010 clause 6.5.3 and clause 6.7.5.
2.1.1.14 On-track machines not equipped with any end coupling feature shall be capableof being attached to a rescue railway vehicle in the event of failure or breakdown.The design shall include an operable failsafe through brake system between theon-track machine and the rescuing rail vehicle that automatically applies thebrakes in the event of a breakaway.
2.1.1.15 The coupling system shall, as a minimum, be designed such that it does notrequire any human presence between them whilst either the on-track machine orvehicle is moving.
Note: The Supply of Machinery (Safety) Regulations 2008 sets out therequirement that the coupling system is designed such that employees are notexposed to undue risk during coupling and uncoupling, or rescue operations.
2.1.1.16 If an on-track machine is fitted with buffers, then under all load conditions, thebuffer height shall be within the range of 940 mm and 1065 mm.
2.1.2 Strength of vehicle structure
2.1.2.1 The static frame strength of on-track machines shall comply withBS EN 14033-1:2011, clause 6.2. In addition on-track machines with a drivingcab shall meet the requirements of BS EN 12663:2010 clause 6.2.3 and forTable 6 and Table 7 only shall be considered as category L.
2.1.2.2 The dynamic frame strength of on-track machines shall comply withBS EN 12663-1:2010, clause 6.6.
2.1.2.3 Attachments to the on-track machine frame, including bogie attachments, shallcomply with BS EN 12663-1:2010 clause 6.5.2 and clause 6.7.
2.1.2.4 Bogies and axlebox equipment shall comply with BS EN 13749:2011 clause 4.Axleboxes and equipment fitted to non-bogied on-track machines shall alsocomply with BS EN 13749:2011 clause 4. The validation of these requirementsshall comply with BS EN 13749:2011 clause 6.2.
2.1.2.5 For on-track machines that include a bogie frame, the integrity of the structure ofthe bogie frame, all attached equipment and body to bogie connections shall bedemonstrated using one of the methods set out in BS EN 13749:2011 clause 6.2.
2.1.2.6 In the application of the load cases referred to in BS EN 13749:2011, theexceptional payload shall be taken as the fully laden condition.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018

Page 8 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
2.1.2.7 The hypothesis taken to evaluate the loads due to bogie running (formulas andcoefficients), set out in BS EN 13749:2011 Annex C, shall be stated in thetechnical file.
2.1.2.8 All roofs over areas designed to be occupied by people shall resist thepenetration into the on-track machine of a concrete cube weighing 100 kgdropped from a height of 3.0 m above the roof. The cube shall be dropped sothat a flat surface hits the roof.
2.1.3 Lifting and jacking
2.1.3.1 Lifting and jacking points on on-track machines shall comply withBS EN 14033-1:2011 clause 6.3. Brackets used for re-railing shall either conformto the options given in prEN 16404:2012 or if different to those choices the,brackets shall be carried on the on-track machine.
2.1.4 Access doors
2.1.4.1 External on-track machine doors and their mountings shall withstand the followingseparate proof load cases without significant permanent deformation or loss ofnormal function:
a) A concentrated perpendicular load of 2.5 kN applied over an area of0.1 m x 0.1 m, acting from within the vehicle. The door structure shall becapable of withstanding this load at any position on the surface of the door.
b) An external surface pressure load of 2.5 kPa.
c) The inner surface pressure load of 2.5 kPa, applied over the internal surfaceof the door plus a concentrated perpendicular load, acting from within thevehicle, of 0.8 kN applied over an area of 0.1 m x 0.1 m. The structure shallbe capable of withstanding the concentrated load at any position on thesurface of the door.
2.1.4.2 External doors for use by personnel for access and egress directly from and tothe track shall withstand as an ultimate load case a sustained pressure of 3 kPaover its internal surface. It is permissible for the door and associatedcomponents not to remain operational after the application of this load.
2.1.4.3 In addition, on-track machine personnel access doors shall comply withBS EN 14033-1:2011 clause 14.2.3 and clause 15.2 (second paragraph).
2.1.5 Mechanical characteristics of glass (other than windscreens)
2.1.5.1 All side windows shall comply with BS EN 14033-1:2011 clause 14.3.5. In thiscase 'safety' glass shall either be laminated or toughened glass.
2.1.5.2 Glass used in roofs shall comply with 2.1.2.8 of this document.
2.1.6 Obstacle deflectors
2.1.6.1 If a self-propelled on-track machine is designed with a maximum speed in excessof 145 km/h, it shall be fitted with obstacle deflectors that comply withAppendix B.
2.2 Track interaction and gauging2.2.1 Gauging
2.2.1.1 The swept envelope of on-track machines in running mode shall be determinedby the process set out in GM/RT2149.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 9 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
2.2.1.2 When the on-track machine is in running mode, any equipment capable ofmoving outside its normal swept envelope shall comply with BS EN 14033-1:2011clause 5.2 and clause 15.2, fourth sentence. When in use, all retention devicesof the equipment being retained shall withstand the foreseeable forcesencountered during normal operation or accidental operation.
2.2.1.3 Pantographs shall not be deployable in running mode.
2.2.2 Axle load and wheel load
2.2.2.1 Axle loads and track loading forces in running mode shall comply withBS EN 14033-1:2011 clause 7.6 and GM/TT0088.
Note: GE/RT8006 (which is referred to in BS EN 15528:2008 which itself isreferred to in BS EN 14033-1:2011 clause 7.6) sets out specific requirements forthe assessment of compatibility between the static load characteristics of theon-track machine and the capacity of underline bridges to carry the vertical staticand dynamic loads imposed by the on-track machine.
2.2.3 Parameters which influence ground based systems
2.2.3.1 For the ability to actuate track circuits, axle-counters and treadles, on-trackmachines intended to self-propel outside possessions shall comply withBS EN 14033-1:2011 clause 7.6 and clause 11. In addition the followingstandards shall apply to on-track machines where applicable:
a) GE/RT8018.
b) GE/RT8026.
c) GE/RT8075.
d) GE/RT8080.
e) GK/RT0028.
f) GK/RT0036.
g) GK/RT0054.
h) GM/RT2461.
2.2.3.2 There are special national conditions contained within BS EN 14033-1:2011,Annex B. Two of the conditions mandate the use of GM/RT2185 andGM/RT2476, on-track machines are not required to comply with these specialnational conditions.
Note: The on-track machine should be compatible with the signalling system forwhich it is intended to be operated. Consideration should be given to the need tofit ERTMS / ETCS, and where fitted it should comply with the requirements inRIS-0340-CCS.
2.2.4 Dynamic behaviour
2.2.4.1 On-track machines shall comply with BS EN 14033-1:2011, clause 8. Theacceptance criteria when carrying out simulation is also permitted to be asdetailed in GM/RT2141 Appendix D.
2.2.5 Running gear
2.2.5.1 Wheelsets fitted to on-track machines for use in running mode shall comply withGM/RT2466.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018

Page 10 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
2.2.6 Minimum curve radius
2.2.6.1 On-track machines, in running mode, shall be designed to negotiate a 500 mradius vertical curve.
2.2.7 Life guards
2.2.7.1 On-track machines shall comply with BS EN 14033-1:2011 clause 7.8.
2.2.8 Electro-magnetic compatibility
2.2.8.1 On-track machines shall comply with BS EN 14033-1:2011 clause 15.4.
2.2.9 Protection measures from electrical traction equipment
2.2.9.1 On-track machines shall comply with BS EN 14033-2:2008+A1:2011 clause 5.8.
2.3 Braking2.3.1 General
2.3.1.1 The brakes on on-track machines, in running mode and when working outside ofa possession if designed for working at speeds greater than 30 km/h, shallcomply with BS EN 14033-1:2011 clause 9. The performance parameters shallbe as set out in GM/RT2042 or GM/RT2043 as applicable.
Note: BS EN 14033-1:2011 clause 9.2.1 and clause 9.2.3 provides two specialnational conditions for the United Kingdom to comply with GM/RT2045.
2.3.2 Parking brake
2.3.2.1 Each on-track machine shall be fitted with a parking brake.
2.3.2.2 Any vehicle within an on-track machine, which is permitted to be coupled oruncoupled during normal operation, shall be fitted with a parking brake.
2.3.2.3 The parking brake shall comply with BS EN 14033-1:2011 clause 9.2.5.2.
2.3.3 Brake data
2.3.3.1 Brake force data shall be calculated in accordance with the requirements ofGM/RT2040.
Note: The brake force data is supplied to the Rolling Stock Library as set out inGM/RT2453.
2.4 Environmental conditions and aerodynamic effects2.4.1 Environmental conditions
2.4.1.1 On-track machines shall comply with BS EN 14033-1:2011 clause 16.1,clause 16.2 and clause 16.3.
2.4.1.2 Fuel tanks shall not be located ahead of a leading axle.
2.4.2 Aerodynamic effects
2.4.2.1 On-track machines shall comply with the requirements of GM/RT2142.
2.4.2.2 On-track machines, with a maximum speed greater than 130 km/h, shall notgenerate a peak to peak pressure pulse from any part of the machine (includingnose to nose connections) greater than 1.44 kPa. The peak to peak pressurepulse shall be measured in the open air on a calm day at height of maximumbody width on the side of a stationary train on a straight stretch of adjacent track.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 11 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
2.4.2.3 For on-track machines with a maximum speed greater than 130 km/h, the mostlikely maximum pressure loadings, including the transient pressure loadingscaused by an on-track machine entering and passing through tunnels, shall bedetermined. These transient pressure loadings are affected by speed, length andaerodynamic characteristics of the on-track machine and by the tunnel geometry.An on-track machine shall sustain such loadings without damage or significantpermanent deformation.
2.5 External lights and visible and audible warning devices2.5.1 External lights
2.5.1.1 External lighting on on-track machines shall comply with BS EN 14033-1:2011clause 13.2 and BS EN 14033-3:2009+A1:2011 clause 5.26.
2.5.2 Visible warning
2.5.2.1 On-track machines shall comply with BS EN 15153-1:2013.
2.5.3 Horn (audible warning device)
2.5.3.1 Where intended for use in Great Britain (GB) only, on-track machines shallcomply with GM/RT2484. On-track machines intended for international use shallcomply with the horn sound pressure levels as set out in in BS EN 15153-2:2013.
2.6 Traction and electrical equipment2.6.1 Traction drive systems
2.6.1.1 Where provided, the traction drive system shall be capable of moving the on-trackmachine in both tare and fully laden conditions, independently of any externalsource of power, in a smooth and progressive manner between 'creep' and 'full'speed, without wheel spin, in normal adhesion conditions ( = 0.1) on level track.
2.6.1.2 Traction drive systems shall be arranged such that identical performance isobtainable in each direction.
2.6.1.3 No single point failure shall result in the unintentional movement of the on-trackmachine.
2.6.1.4 Traction drive systems designed for multiple working, where the leading on-trackmachine operates the system in a connected trailing on-track machine, shall bematched to comply with 2.6.1.1 of this document.
2.6.2 Diesel engines used for traction
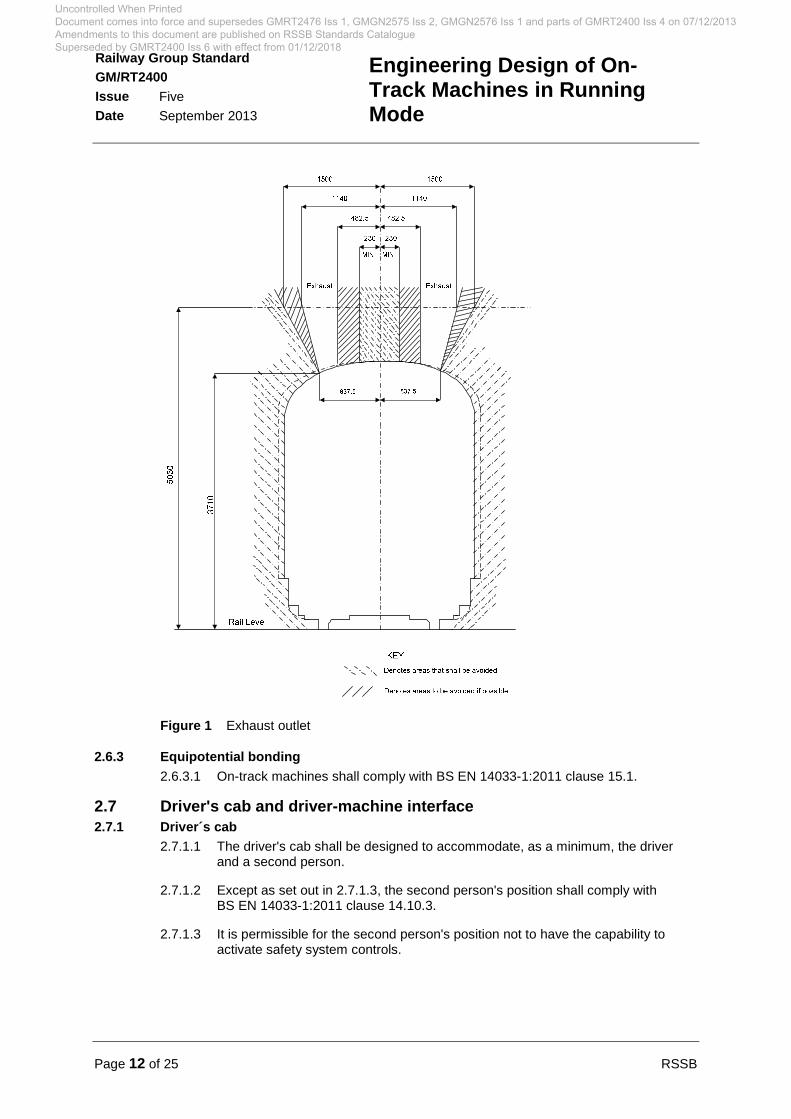
2.6.2.1 On-track machines shall comply with BS EN 14033-1:2011 clause 16.4. Exceptwhere otherwise permitted by BS EN 14033-1:2011 clause 16.4, the exhaustoutlets shall be as shown in Figure 1.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 12 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Figure 1 Exhaust outlet
2.6.3 Equipotential bonding
2.6.3.1 On-track machines shall comply with BS EN 14033-1:2011 clause 15.1.
2.7 Driver's cab and driver-machine interface2.7.1 Driver´s cab
2.7.1.1 The driver's cab shall be designed to accommodate, as a minimum, the driverand a second person.
2.7.1.2 Except as set out in 2.7.1.3, the second person's position shall comply withBS EN 14033-1:2011 clause 14.10.3.
2.7.1.3 It is permissible for the second person's position not to have the capability toactivate safety system controls.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 13 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
2.7.1.4 For access to and egress from the driving cab(s), on-track machines shall complywith BS EN 14033-1:2011 clause 14.2. It is permissible to:
a) Consider BS EN 14033-1:2011 Annex E as an informative annex with regardto the dimensions given.
b) Have a walkway headroom of less than 2000 mm as set out inRIS-1702-PLT clause 3.2.1.
2.7.1.5 The forward visibility shall comply with BS EN 14033-1:2011 clause 14.6. Wherean on-track machine is not fitted with buffers, the distance in front of the on-trackmachine shall be taken from a plane 300 mm in front of the front of the on-trackmachine.
2.7.1.6 The interior layout of the driving cab shall comply with BS EN 14033-1:2011clause 14.3.3, clause 14.7 and clause 14.8, except that the direction of the powerbrake controls is permitted to be varied for compatibility with existing machines.
2.7.1.7 The driver's and second person's seats shall comply withBS EN 14033-3:2009+A1:2011 clause 5.5.
2.7.1.8 The driver's cab heating, cooling and ventilation shall comply withBS EN 14033-1:2011 clause 14.4.
2.7.1.9 The driver's cab internal lighting shall comply with BS EN 14033-1:2011clause 14.5.
2.7.1.10 All forward facing surfaces, except as set out in 2.7.2.1 of this document, ofon-track machines occupied by people shall have sufficient impact strength toresist penetration of a sharp cornered hollow steel cube having sides of 70 mm to75 mm and a mass of 0.9 kg and travelling at twice the maximum operatingspeed of the on-track machine.
2.7.2 Windscreen
2.7.2.1 The windscreen and forward facing windows in the driving cab and anycompartment occupied when in running mode shall comply withBS EN 14033-1:2011 clause 14.3.4.
2.7.3 Driver machine interface
2.7.3.1 The controls in the driving cab shall comply with 2.7.1.6 of this document andBS EN 14033-1:2011 clause 14.10.
2.7.3.2 On-track machine drivers' cabs shall be designed to permit operation by a singledriver.
2.7.3.3 The maximum noise level permitted in the cab is set out in theConventional Rail Noise TSI (CR NOI TSI).
2.7.3.4 The acoustic characteristics of the driving cabs shall be such that explodingdetonators, as specified in BR 0640A, are heard inside the cab at any vehiclespeed and readily distinguished from background noise.
2.7.4 Onboard tools and portable equipment
2.7.4.1 Each driving cab shall be provided with the equipment set out inBS EN 14033-1:2011 Annex J.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 14 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
2.7.5 Recording device
2.7.5.1 On-track machines with a driving cab shall be fitted with an on-train monitoringrecorder (OTMR). The OTMR shall comply with GM/RT2472.
2.8 Fire safety and evacuation
2.8.1 Fire safety and evacuation protection on on-track machines shall comply withBS EN 14033-2:2008+A1:2011 clause 5.9.
Note: BS EN 14033-2:2008+A1:2011 clause 5.9 refers to the term 'operator', thismeans the driver when the on-track machine is in running mode.
2.8.2 The selection of materials used to construct machines shall comply withEN 45545-2:2013. On-track machines shall correspond to operationalcategory 1.
2.9 Design for rescue purposes
2.9.1 To enable the safe removal of the machine clear of the line, failed on-trackmachines shall be capable of being coupled to a locomotive fitted with adrawhook that complies with BS EN 15566:2009+A1:2010 clause 5.2.
2.9.2 It shall be possible (where not prevented by damage to the brake system) torelease and apply the brakes of the combined train when the assisted on-trackmachine is coupled to the assisting train or locomotive. The brake system shallbe designed to apply the brakes in the event of the combined train parting.
2.9.3 Where the on-track machine is designed to be recovered by use of an emergencytow bar, then the emergency tow bar shall:
a) Be carried on the on-track machine.
b) Be designed to be fitted by one person.
c) Accept the forces and movements involved in the recovery of the on-trackmachine, without significant permanent deformation or damage.
2.9.4 Where the on-track machine is designed to be recovered involving the use ofspecial brake hoses, then the special brake hoses shall:
a) Be carried on the on-track machine.
b) Be designed to be fitted by one person.
2.9.5 It shall be possible to return the on-track machine to running mode in the event offailure of the primary power source. All equipment required for emergencystowage shall be supplied as part of the on-track machines tool kit, together withsuitable provision for it to be carried on the machine.
2.10 Marking and registration
2.10.1 On-track machines shall comply with the requirements for markings set out inBS EN 14033-1:2011 clause 17 and BS EN 14033-3:2009+A1:2011 clause 8.2.
2.10.2 On-track machines shall comply with the requirements for an overhead lineequipment warning line set out in GM/RT2181.
2.10.3 On-track machines shall comply with GM/RT2453.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018

RSSB Page 15 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
2.11 Demountable modules
2.11.1 A demountable module shall be assessed as part of the on-track machine to allrelevant parts of GM/RT2400 when any of the following apply:
a) It has been manufactured or modified to suit the particular on-track machineor type of on-track machine.
b) It is used to carry personnel during running or travelling.
c) It is positioned on the on-track machine by other than gravity or twist locks.
d) It has electrical, pneumatic or hydraulic connections to the on-track machine.
e) It is connected to the on-track machine by twist locks and is used for liftingany load.
f) It is connected to the on-track machine by twist locks and has moveablecomponents which are able to exceed the gauge profile of the on-trackmachine.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 16 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Part 3 Documentation
3.1 Maintenance
3.1.1 Maintenance documentation for on-track machines shall be provided and complywith GM/RT2004.
3.2 Operating instructions
3.2.1 Operating instructions shall comply with BS EN 14033-1:2011 Annex G,BS EN 14033-2:2008+A1:2011 clause 7 and BS EN 14033-3:2009+A1:2011clause 8.
3.2.2 The operating instructions shall also include the following:
a) The limiting value of track features for the coupling system, as set out in2.1.1.5 of this document.
b) The limiting value of track features for the coupling and uncoupling action, asset out in 2.1.1.6 of this document.
c) Design operating conditions, as set out in 2.1.1.11 of this document.
d) The swept envelope of the on-track machine in running mode, as set out in2.2.1.1 of this document.
e) The fitting instructions and any limitations on movement of the on-trackmachine and operation arising from the use of the emergency tow bar, asset out in 2.9.3 of this document.
f) The fitting instructions and any limitations on movement and operation of theon-track machine arising from the use of the special brake hoses or otherconnections, as set out in 2.9.4 of this document.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 17 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Part 4 Application of this document
4.1 Application - infrastructure managers
4.1.1 There are no requirements applicable to infrastructure managers.
4.2 Application - railway undertakings4.2.1 Scope
4.2.1.1 The requirements of this document apply to all new on-track machines.
4.2.1.2 The requirements of this document apply to all modifications of on-trackmachines.
4.2.1.3 Where an on-track machine is subject to modification or upgrade and the natureof the modification or upgrade provides a reasonable opportunity to bring theon-track machine into conformity, then the requirements of this documentapplicable to the alteration apply.
4.2.2 Exclusions from scope
4.2.2.1 There are no exclusions from the scope specified in 4.2.1 for railwayundertakings.
4.2.3 General compliance date for railway undertakings
4.2.3.1 This Railway Group Standard comes into force and is to be complied with from07 December 2013, except as specified in 4.2.4. Where the dates specified in4.2.4 are later than the above date, this is to allow railway undertakings sufficienttime to achieve compliance with the specified exceptions.
4.2.3.2 After the compliance dates, or the date by which compliance is achieved if earlier,railway undertakings are to maintain compliance with the requirements set out inthis Railway Group Standard. Where it is considered not reasonably practicableto comply with the requirements, permission to comply with a specified alternativeshould be sought in accordance with the Railway Group Standards Code.
4.2.4 Exceptions to general compliance date
4.2.4.1 It is permissible for on-track machines to continue to be built to the standard inforce at the time of signing a contract, where that contract has already beensigned by the date of implementation of this standard.
4.3 Health and safety responsibilities
4.3.1 Users of documents published by RSSB are reminded of the need to considertheir own responsibilities to ensure health and safety at work and their own dutiesunder health and safety legislation. RSSB does not warrant that compliance withall or any documents published by RSSB is sufficient in itself to ensure safesystems of work or operation or to satisfy such responsibilities or duties.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 18 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Appendix A Track Twist Geometry
The content of this appendix is mandatory.
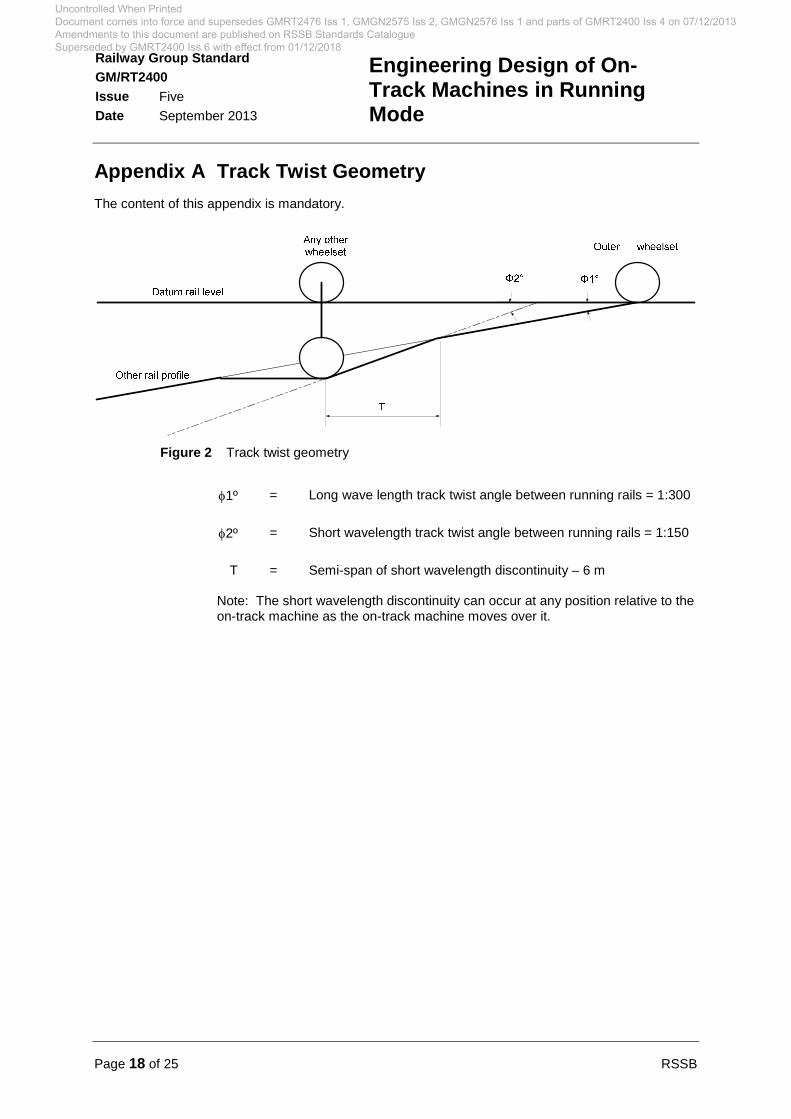
Figure 2 Track twist geometry
1º = Long wave length track twist angle between running rails = 1:300
2º = Short wavelength track twist angle between running rails = 1:150
T = Semi-span of short wavelength discontinuity – 6 m
Note: The short wavelength discontinuity can occur at any position relative to theon-track machine as the on-track machine moves over it.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 19 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Appendix B Obstacle Deflectors
The content of this appendix is mandatory.
B.1 Technical requirements for obstacle deflectorsB.1.1 Obstacle deflectors are fitted with the aim of minimising the risk of derailment in
the event of a collision between the train and a large obstacle such as an animalor car on the track.
B.1.2 Obstacle deflectors shall be fitted to all leading on-track machines with amaximum operational speed of 145 km/h or above, unless the axleload of theleading bogie is 170 kN or more, or if operation is exclusively on third-rail d.c.lines. For on-track machines with axleloads less than 170 kN, which operate onlyon third-rail d.c. lines, obstacle deflectors shall be fitted if the maximum operatingspeed is greater than 160 km/h.
B.1.3 Obstacle deflectors shall be mounted on the on-track machine body structure andnot on bogies.
B.1.4 Where the maximum operational speed is greater than 160 km/h, the axleloads ofthe leading bogie of the leading on-track machine shall be at least 120 kN.
B.1.5 An obstacle deflector shall:
a) Be as wide as practicable within the on-track machine profile, extend as lowas safely possible within the infrastructure clearances (GM/RT2149 sets outthe clearances) and be angled symmetrically in plan view about the on-trackmachine centreline to produce an included angle of 160°.
b) Be vertical in elevation. A concave forward face, symmetrical about ahorizontal axis, is permissible.
c) Be able to resist as a proof load a static longitudinal force applied uniformlyover the complete leading surface of the deflector of:
i) 300 kN for a maximum operating speed of 145 km/h.
ii) 375 kN for a maximum operating speed of 160 km/h.
iii) 450 kN for a maximum operating speed of 175 km/h.
iv) 600 kN for a maximum operating speed of 200 km/h and over.
d) Be able to resist as a proof load a static longitudinal force, applied at anyposition along its bottom edge (distributed over a distance of 500 mm) of:
i) 300 kN for a maximum operating speed of 145 km/h.
ii) 375 kN for a maximum operating speed of 160 km/h.
iii) 450 kN for a maximum operating speed of 175 km/h.
iv) 600 kN for a maximum operating speed of 200 km/h and over.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 20 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
e) For on-track machines with a maximum operating speed of 200 km/h or less,be designed so that progressive collapse starts at a static longitudinal forceapplied at any position along its bottom edge (distributed over a distance of500 mm) of at least the appropriate value in B.1.4 d) and continues with aforce of 80 % or more of this value over a longitudinal deflection of at least150 mm.
f) For on-track machines with a maximum operating speed of greater than200 km/h up to and including 225 km/h, be designed so that progressivecollapse starts at a static longitudinal force, applied at any position along itsbottom edge (distributed over a distance of 500 mm) of at least theappropriate value in B.1.4 d) and continues so as to absorb at least:
i) 100 kJ over a longitudinal deflection of at least 150 mm.
g) Be designed so that, if it is permanently deformed by an impact, no part of itshall foul the infrastructure or running gear or interfere with the operationalperformance of the bogie.
B.1.6 The underneath of the on-track machine body, forward of the deflector, shall bedesigned so as not to impede the flow or ejection of debris from the deflector.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 21 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Appendix C List of Railway Group Standards for whichOn-Track Machines are removed from scope
The content of this appendix is for information purposes.
C.1.1 From the publication of this standard, the following Railway Group Standards donot apply to on-track machines:
a) GE/RT8014.
b) GE/RT8015.
c) GM/RT2000.
d) GM/RT2001.
e) GM/RT2100.
f) GM/RT2130.
g) GM/RT2141.
h) GM/RT2160.
i) GM/RT2161.
j) GM/RT2162.
k) GM/RT2176.
l) GM/RT2185.
m) GM/RT2190.
n) GM/RT2304.
o) GM/RT2483.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 22 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
Definitions
Coupling system
The mechanical system, including buffers where fitted, drawgear and gangway wherefitted, that connects two rail vehicles together, and the electrical and pneumaticconnections where fitted between vehicles.
Drawgear
A set of fittings used to connect railway vehicles for the purpose of transmitting longitudinalforces between adjacent vehicles, connection can be made manually or automatically.
Driving
Moving the on-track machine self-propelled in running mode.
Driving cab
The place from where the on-track machine is controlled for movement in running modewhen self-propelled.
Fixed formation
Two or more on-track machines semi-permanently coupled and that can only be workedtogether.
On-track machine
Any rail-mounted machine, whose primary function is for the renewal, maintenance,inspection or measurement of the infrastructure.
Operating instructions
The instruction handbook provided by the manufacturer detailing the on-track machinedesign options and working instructions, including details of any operating restrictions.
Running
An on-track machine is considered to be in running mode when its suspension allowsmovement along the track, all moveable parts stowed within the applicable gauge and theon-track machine interacting with the signalling and control systems.
Travelling
An on-track machine is considered to be in travelling mode when its suspension allowsmovement along the working track, all moveable parts stowed within the applicable gauge,the machine does not require to interact with the signalling and control systems (in thiscondition there is no need to ensure operation of signalling systems or for cab basedsignalling equipment). An on-track machine in travelling mode does not need to meet theoperational requirements for the movement of trains on the railway network
Technical Specification for Interoperability (TSI)
A TSI is a specification adopted in accordance with the European Interoperability Directiveby which each subsystem or part subsystem is covered in order to meet the essentialrequirements and ensure the interoperability of the rail system.
Working
The use of an on-track machine to perform any of its permitted design tasks outside andinside of a possession. As soon as a machine is unpacked it is in working mode.
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018

RSSB Page 23 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
References
The Catalogue of Railway Group Standards gives the current issue number and status ofdocuments published by RSSB. This information is also available fromwww.rgsonline.co.uk.
RGSC 01 Railway Group Standards Code
RGSC 02 The Standards Manual
Documents referenced in the textRailway Group Standards
GE/RT8006 Assessment of Compatibility of Rail Vehicle Weights andUnderline Bridges
GE/RT8014 Axlebox Condition Monitoring - Hot Axlebox Detection
GE/RT8015 Electromagnetic Compatibility between RailwayInfrastructure and Trains
GE/RT8018 Mechanical Trainstop Systems
GE/RT8026 Safety Requirements for Cab Signalling Systems
GE/RT8075 AWS and TPWS Interface Requirements
GE/RT8080 Train Radio Systems for Voice and Related MessagingCommunications
GE/RT8106 Management of Safety Related Control, Command andSignalling (CCS) System Failures
GE/RT8250 Reporting High Risk Defects
GE/RT8270 Assessment of Compatibility of Rolling Stock andInfrastructure
GK/RT0028 Infrastructure Based Train Detection InterfaceRequirements
GK/RT0036 Transitions Between Signalling Systems
GK/RT0054 Radio Electronic Token Block
GM/RT2000 Engineering Acceptance of Rail Vehicles
GM/RT2001 Design Scrutiny for the Engineering Acceptance of RailVehicles
GM/RT2004 Rail Vehicle Maintenance
GM/RT2040 Calculation of Brake Force Data for Rolling Stock Library
GM/RT2042 Braking System Requirements and Performance forTraction Units
GM/RT2043 Braking System and Performance for Freight Trains
GM/RT2045 Braking Principles for Rail Vehicles
GM/RT2100 Requirements for Rail Vehicle Structures
GM/RT2130 Vehicle Fire, Safety and Evacuation
GM/RT2141 Resistance of Railway Vehicles to Derailment and Roll-Over
GM/RT2142 Resistance of Railway Vehicles to Roll-Over in Gales
GM/RT2149 Requirements for Defining and Maintaining the Size ofRailway Vehicles
GM/RT2160 Environment Inside Railway Vehicles (Audibility ofdetonators)
GM/RT2161 Requirements for Driving Cabs of Railway Vehicles
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
Page 24 of 25 RSSB
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
GM/RT2162 Traincrew Access to and Egress from Railway Vehicles
GM/RT2176 Air Quality and Lighting Environment for Traincrew InsideRailway Vehicles
GM/RT2181 Overhead Line Equipment (O.L.E.) Warning Line onTraction and Rolling Stock
GM/RT2185 Train Safety Systems
GM/RT2190 Compatibility Requirements for Rail Vehicle Couplings andInterconnectors
GM/RT2273 Post Incident and Post Accident Testing of Rail Vehicles
GM/RT2304 Equipotential Bonding of Rail Vehicles to Running RailPotential
GM/RT2453 Registration, Identification and Data to be Displayed onRail Vehicles
GM/RT2461 Sanding Equipment Fitted to Multiple Units and On-TrackMachines
GM/RT2466 Railway Wheelsets
GM/RT2472 Data Recorders on Trains - Design Requirements
GM/RT2476 On-Track Machine Requirements for Demonstrating theReliable Operation of Track Circuits
GM/RT2483 Visibility Requirements for Trains
GM/RT2484 Audibility Requirements for Trains
GM/TT0088 Permissible Track Forces for Railway Vehicles
RSSB documents
GM/GN2575 Guidance on the Engineering Acceptance of On-TrackMachines
GM/GN2576 Guidance on Vehicle Requirements for Reliable TrackCircuit Operation
RIS-0340-CCS Rail Industry Standard for Onboard ETCS
RIS-1702-PLT Rail Industry Standard for the Design of On-TrackMachines in Working and Travelling Modes
Other references
BR 0640A Specification for Railway Detonators, Single ChamberType for Hand or Machine Placing (1964)
BS EN 12663-1:2010 Railway applications – Structural requirements of railwayvehicle bodies, Part 1: Locomotives and passenger rollingstock (and alternative method for freight wagons)
BS EN 13749:2011 Railway applications - Wheelsets and bogies - Method ofspecifying the structural requirements of bogie frames
BS EN 14033-1:2011 Railway applications - Track - Railbound construction andmaintenance machines - Part 1: Technical requirementsfor running
BS EN 14033-2:2008+A1:2011 Railway applications - Track – Railbound construction andmaintenance machines, Part 2: Technical requirements forworking
BS EN 14033-3:2009+A1:2011 Railway applications - Track – Railbound construction andmaintenance machines, Part 3: General safetyrequirements
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018
RSSB Page 25 of 25
Railway Group Standard
GM/RT2400
Issue Five
Date September 2013
Engineering Design of On-Track Machines in RunningMode
BS EN 15153-1:2013 Railway applications - External visible and audible warningdevices for high speed trains - Part 1: Head, marker andtail lamps
BS EN 15153-2:2013 Railway applications - External visible and audible warningdevices for high speed trains - Part 2: Warning horns
BS EN 15528:2008 Railway applications – Line categories for managing theinterface between load limits of vehicles and infrastructure
BS EN 15566:2009+A1:2010 Railway applications - Railway rolling stock - Draw gearand screw coupling
CR LOC & PAS TSI Conventional Rail Locomotives and Passenger RollingStock TSI Decision 2011/291/EU,(OJ L139/1, 26.5.2011, p1)
CR NOI TSI Conventional Rail Noise Aspects of Conventional RollingStock TSI, Decision 2006/66/EC, (OJ L37, 8.2.2006, p1)
EN 45545-2:2013 Railway applications - Fire protection on railwayvehicles – Part 2: Requirements for fire behavior ofmaterials and components
prEN 16404:2012 Railway Applications - Re-railing and recoveryrequirements for railway vehicles
S.I.2008/1597 The Supply of Machinery (Safety) Regulations 2008
Uncontrolled When Printed Document comes into force and supersedes GMRT2476 Iss 1, GMGN2575 Iss 2, GMGN2576 Iss 1 and parts of GMRT2400 Iss 4 on 07/12/2013 Amendments to this document are published on RSSB Standards Catalogue Superseded by GMRT2400 Iss 6 with effect from 01/12/2018