Enabling MUM-T within Army Formations - DARPA · Enabling MUM-T within Army Formations ......
22
U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER Enabling MUM-T within Army Formations Robotics Community of Practice 30 Jan 2016 Dr. Robert W. Sadowski Army Chief Roboticist Chair, RDECOM Robotics Community of Practice TARDEC Ground Vehicle Robotics DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED
-
Upload
trannguyet -
Category
Documents
-
view
234 -
download
1
Transcript of Enabling MUM-T within Army Formations - DARPA · Enabling MUM-T within Army Formations ......

U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER
Enabling MUM-T within Army Formations
Robotics Community of Practice
30 Jan 2016
Dr. Robert W. SadowskiArmy Chief RoboticistChair, RDECOM Robotics Community of PracticeTARDEC Ground Vehicle Robotics
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

2
Outline
• Army RAS Strategy Overview
• MUM-T Definition
• Recent Dismounted Experimentation
• Congested Urban Environment Vignette
• Architecture Approach
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED
… I'm telling you right now, 10 years from now if the first person through a breach isn't a **** robot, shame on us.”
–Deputy Secretary of Defense Robert Work, Reagan Defense Forum: The Third Offset Strategy, November 7, 2015.

DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED 3
• Note HDL-32E LIDAR on Russian, Chinese, and
Commercial squad level transport demonstrators
• Snapshots of some systems from Open Source
Reporting
Worldwide our adversaries and others
are aggressively pursuing…
…. and they are looking to both
employ & sell them
URAN 9: Teleop UCV with
30mm/MANPADS/ATGM
VIKHR: Optionally manned BMP3
Scout variant with Tethered UAS
and UGV
From last month’s Russian Combat
Export Show
Sample Unmanned Combat Platforms

Army RAS Strategy Capability Progression
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED 4
2025 Mid
2030 Far
Autonomous Convoy Operations (2020-2025)
Unmanned Air Systems Autonomy (2020)
Advanced Teaming for Tactical Missions (ATTac)(2020-2025)
Dynamic Force & Mission Autonomy (2030-2040+)
Extend the Reach of the Warfighter (2020)
2015
Active Safety Driver Assist (2015)
Mid Term Priorities: 2021-2030
Increase situational awareness advanced, smaller RAS and swarming
Lighten the physical load with exoskeleton capabilities
Improve sustainment with fully automated convoy operations
Improve maneuver with unmanned combat vehicles and
advanced payloads
2020 Mid
Far Term Priorities: Beyond 2030
Increase situational awareness with persistent reconnaissance from swarming systems
Improve sustainment with autonomous aerial cargo delivery
Facilitate maneuver with advancements to unmanned combat vehicles
Combined Arms Maneuver (2030-2035)
Optionally Manned Vertical Lift (2035-2040)
Near Term Priorities: Until 2020
Increase situational awareness for dismounted forces at lower echelons
Lighten the physical load for dismounted forces
Improve sustainment with automated ground resupply
Facilitate movement with improved route clearance
Protect the Force with EOD RAS platform and payload improvements
“Adapt Near ►Evolve Mid ► Innovate Far”
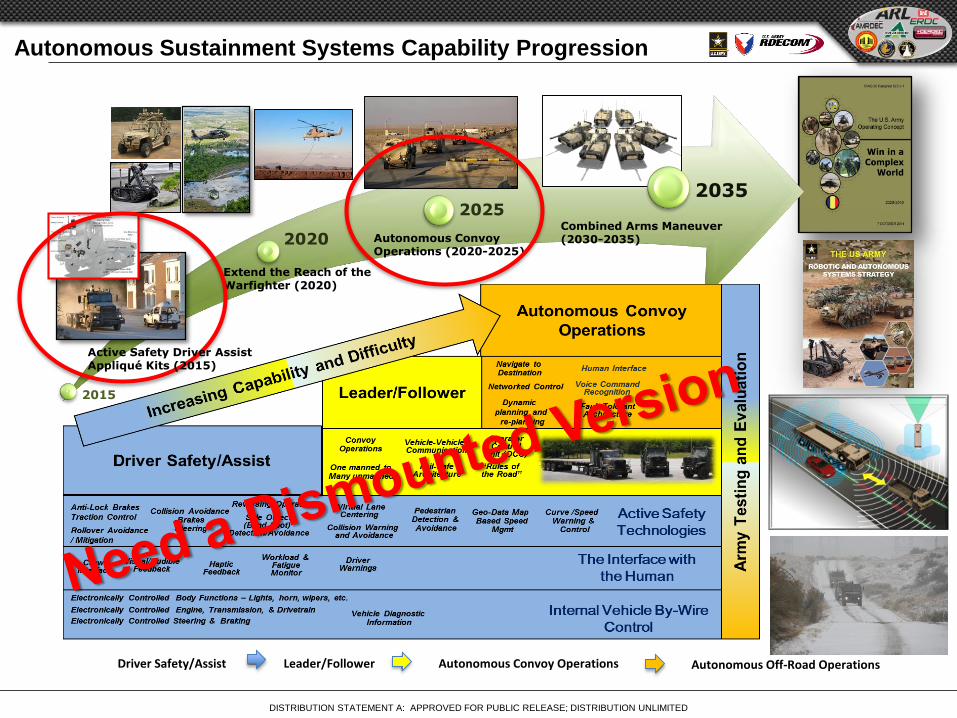
Autonomous Sustainment Systems Capability Progression
20252035
Combined Arms Maneuver (2030-2035)Autonomous Convoy
Operations (2020-2025)
Extend the Reach of the Warfighter (2020)
2015
2020
Driver Safety/Assist Leader/Follower Autonomous Convoy Operations Autonomous Off-Road Operations
Active Safety Driver Assist Appliqué Kits (2015)
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

6
Robotics and Autonomy Enabled Systems Taxonomy
Tool
Independent Systems Team Member
• Concentrating on user "direct" control and has no "team-member negotiation" with the user
• Increased standoff but negative force multiplication effect
• These robots concentrate on autonomy, but relatively no negotiation with other manned or unmanned assets.
• Highly increased standoff but neutral force multiplication effect
Fielded C-IED Systems
Tele-op Platform with RWS
Leader-Follower Convoy
Leader-Follower Dismount
Route Clearance
Autonomous Convoy Operations
• These robots are mostly autonomous and negotiates with other manned and/or unmanned assets.
• Highly Increased standoff and positive force multiplication effect
Each class provides increased operational capability and generally increases in complexity (required more software/sensing)
from ‘Tool’ to ‘Team Member’
Tele-op Platform
RSTA
By Role and Degree of Autonomy
De
gre
e o
f A
uto
no
my
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

Desired Endstate:
• Develop, deliver and transition desired RAS capabilities
• Shape future RAS across all Army formations and warfighting functions
7
RAS Strategy Implementation Framework
Develop RAS Capability
Sustain Integrated Campaign of Learning
Envision the Future
LOE 1:
LOE 2:
LOE 3:
Introducing robotics technologies into the formation is fundamentally new for the Army and requires concurrent technology development, operational experimentation and CONOPS development in order to maximize the capability offered by autonomous systems.
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED
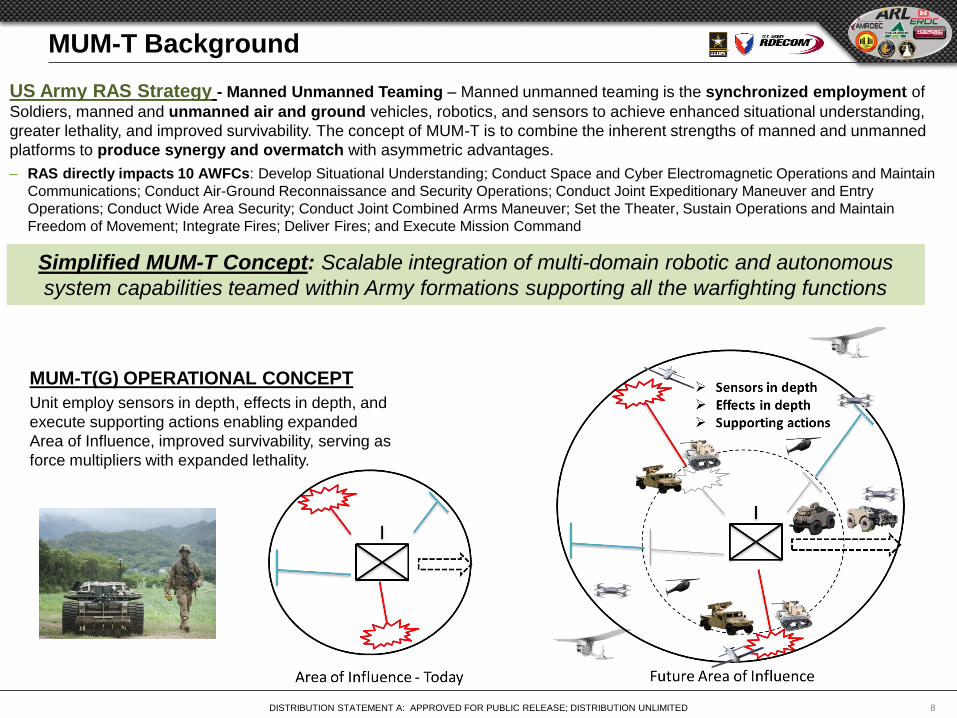
MUM-T Background
US Army RAS Strategy - Manned Unmanned Teaming – Manned unmanned teaming is the synchronized employment of
Soldiers, manned and unmanned air and ground vehicles, robotics, and sensors to achieve enhanced situational understanding,
greater lethality, and improved survivability. The concept of MUM-T is to combine the inherent strengths of manned and unmanned
platforms to produce synergy and overmatch with asymmetric advantages.
– RAS directly impacts 10 AWFCs: Develop Situational Understanding; Conduct Space and Cyber Electromagnetic Operations and Maintain
Communications; Conduct Air-Ground Reconnaissance and Security Operations; Conduct Joint Expeditionary Maneuver and Entry
Operations; Conduct Wide Area Security; Conduct Joint Combined Arms Maneuver; Set the Theater, Sustain Operations and Maintain
Freedom of Movement; Integrate Fires; Deliver Fires; and Execute Mission Command
8
Simplified MUM-T Concept: Scalable integration of multi-domain robotic and autonomous
system capabilities teamed within Army formations supporting all the warfighting functions
MUM-T(G) OPERATIONAL CONCEPT
Unit employ sensors in depth, effects in depth, and
execute supporting actions enabling expanded
Area of Influence, improved survivability, serving as
force multipliers with expanded lethality.
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

Recent Dismounted Experimentation
• Recent warfighter experiments mix both industry and S&T platforms across a variety of environments focused on Squad Multipurpose Equipment Transport scale platforms and quad/micor quad scale UAS’s
• Challenge remains that current systems require 1 operator : 1 robot
• Assured Control – Comms/Cyber, etc. (User Trust)
Benefits of User Involvement: Soldiers turned
SMET into a mobile 60 mm mortar platform
Remote Weapons Station SMET
Utility SMET
Alaska - Arctic
OCT 2105: Robotic Enhanced Company
JUL 2016: Hawaii - Jungle
AP Lane Clearing SMET
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED
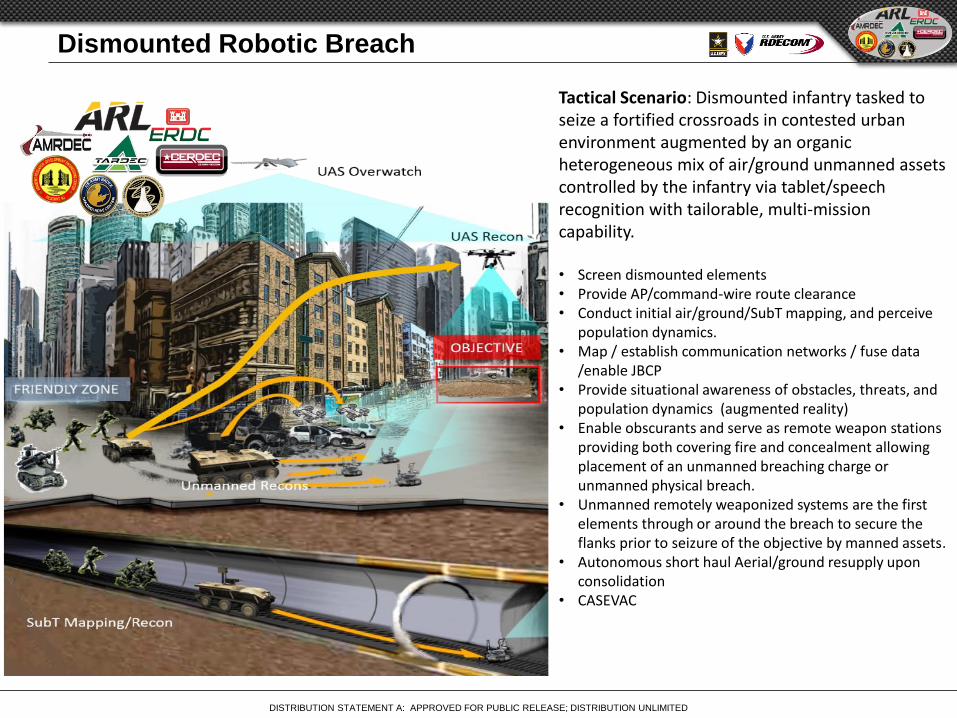
Dismounted Robotic Breach
Tactical Scenario: Dismounted infantry tasked to seize a fortified crossroads in contested urban environment augmented by an organic heterogeneous mix of air/ground unmanned assets controlled by the infantry via tablet/speech recognition with tailorable, multi-mission capability.
• Screen dismounted elements• Provide AP/command-wire route clearance• Conduct initial air/ground/SubT mapping, and perceive
population dynamics.• Map / establish communication networks / fuse data
/enable JBCP• Provide situational awareness of obstacles, threats, and
population dynamics (augmented reality)• Enable obscurants and serve as remote weapon stations
providing both covering fire and concealment allowing placement of an unmanned breaching charge or unmanned physical breach.
• Unmanned remotely weaponized systems are the first elements through or around the breach to secure the flanks prior to seizure of the objective by manned assets.
• Autonomous short haul Aerial/ground resupply upon consolidation
• CASEVAC
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

AGVRA 2.x AGVRA 3.xAGVRA 1.0
Leader/Follower/Autonomous Convoy Operations
Active Safety Driver Assist Appliqué Kits
11
Manned/Unmanned Mounted Teams
Unmanned Air-support and Comms. relay
Close-Combat Weaponized Support
Manned-Unmanned Teaming
Autonomous Ground Vehicle Reference Architecture (AGVRA)
Functional / Logical /
Operational Architecture
Hardware: ECU & Data Bus
Architecture, System Interfaces
Software: Architecture, Development
Framework, & Library
Fielded, Proprietary (Closed) Robotic Solutions
Go
v’t
Man
aged
A
rch
itec
ture
Rapidly build increased capability over time
• Expensive• Limits Innovation
•Difficult to Upgrade• Limits Competition
• Enables competition across the life cycle• Reduces cost and speeds development
•Rapid, cost effective evolution of capability• Enables Army to take advantage of industry innovation
Current Situation Future of Army Autonomy
Evolution of Ground Robotics Architecture
Work with developing Commercial Automotive Standards to influence them toward shared applications (i.e. on-road driving)
SAE J3131 - Automated Driving Reference Architecture
Influencing Developing Commercial Standards
ROS-M 1.x
GMSA 1.x
RTK 2.x
AMAS 2.x
IOP 3.0
ROS-M 2.x
GMSA 2.x
RTK 3.x
IOP 4.0
Autonomy Software Framework
Autonomy Software Application Design Approach
Autonomy Software Library
Interface between Autonomy Kit and By-Wire System
Interface (HW/SW) Standards for Ground Vehicle Robotics
ROS
GMSA .5
RTK 1.x
AMAS 1.x
IOP 2.0
Significant Architectural Views of AGVRA
4Q 20172015 2019
Developmental (Not Published)
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

AGVRA Software Architecture (Funded under the AGR STO)
Layered view of AGVRA Software Architecture
12
Robotic Operating System (ROS)
Application Layer
Communication Layer
Class Library Layer
Hardware Interface Layer
Application Libraries
Processing / Autonomy Systems (Sensors, GPS, Ethernet, Power Supply, etc..)
External Subsystems (By-Wire Kit, Controllers, Payloads, Communication Systems)
Client (Language) Layer
Syst
em S
ervi
ces
Res
ou
rce
A
cces
s Se
rvic
es
Physical Resources
Ap
plic
atio
ns Programming
Language Interface roscpp (C++) rospy (Python) roslisp (LISP) Others….
RTK Library ROS Core ROS Controls ROS Perception Others….
Core ROS Services rosservice roslaunch rosparamrosbag Others….
Software Interface to Autonomy Hardware
Drivers to Autonomy Systems / Computing
Interoperability Profile (IOP) Hardware / Software Interfaces
Robotic Behavior Applications (GMSA) Path Planner World Model Localization Vehicle Mgmt Others….
• The AGVRA software architecture is constructed to enable a modular approach to upgrade and acquire autonomous system behaviors for military ground systems.
• The AGVRA bases military autonomous software on the world largest open-source framework and development community to maximize opportunities for innovation across industry, academia and the government.
Approach focuses on:
Maximizing code reuse to minimize cost and speed development,
Government owned SW interfaces to enable competition
Common SW baseline enables use of simulation environment to speed safety certification of platform modifications.
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

13
Specifies the base concepts, architecture, requirements, and overview for the UGV IOP; specifically the platform, payload, mobility, on-vehicle network, communication, and logical interoperability messaging requirements.
Specifies the manner in which the SAE AS-4 JAUS standards have been profiledSpecifies additional SAE AS-4 JAUS messages & transport protocols required to support the scope of the UGV IOP
Scopes and bounds the requirements basis for a given IOP Version
Individual annexes specify the standards, requirements, and conformance approach for their subsystem
Current IOP 2.0 Framework
UGV Interoperability Profile (IOP)
Capabilities already fielded MTRS Inc II, CRS-I RCIS, HMDS
v3 planned for FY17
Future versions to follow to expand IOP to keep up
with emerging requirements and
technology developments
PEO CS&CSS funds TARDEC to maintain and develop their IOP which defines software messaging & hardware interfaces between major subsystems of unmanned ground systems utilizing existing standards.
• Specified in contract language for all unmanned ground systems acquisition programs
UGV IOP links autonomy portion of UGV to Mission Essential Subsystems
Exem
pla
r ca
pab
iliti
es li
sted
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

14
Summary
• Army RAS Strategy Overview
• MUM-T Definition
• Recent Dismounted Experimentation
• Congested Urban Environment Vignette
• Architecture Approach
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

15
Questions/Discussion
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

16
Backup
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

LOE 1: Envision the Future
• Validate potential formational constructs through soldier in the loop simulation via
Early Synthetic Prototyping (ESP) and User Wargaming
• Explore different platforms/employment: purpose built/applique/optionally manned, lethality/survivability/mobility mix, levels of supervision and degraded comms effects
• Leverage Soldier Innovation Workshops to generate new concepts from Soldiers
• Generate future CONOPS and requirements documents
Soldier Innovation Workshops
Early Synthetic Prototyping
User Wargaming
System Concepting / Design Trades
Envision the FutureRAS is not like integrating a better rifle into the
platoon… it has the potential to change the formation itself and the character of future warfare
Enabling the user to explore RAS concepts in the M&S domain will enable better assessment of robotic and formational constructs that will feed into S&T developmental needs
17
Requirements Generation
DRAFTRASICD
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

18
LOE 3: Sustain Integrated Campaign of Learning
Sustain Integrated Campaign of Learning
Successful implementation of RAS will not predominantly be a hardware race… whose robot shoots farther or better… to make these platforms
truly members of the combined arms team will require user experimentation to refine/guide S&T
developmental paths and enable the user to employ innovative CONOPS• Work with TRADOC Centers of Excellence to
deliberately conduct operational experiments with RAS platforms to embed the User Community in the technology development process.
• Determine the utility of RAS platforms through relevant operational assessment to both drive future CONOPS/TTPs/Requirements as well as feedback information to RAS technology development (Gaps/Use Cases)
• Leverage RAS ICDT management structure to layout battle rhythm of M&S through COE Battle Labs coupled with hardware experimentation
Near-term User Engagements:Joint Ground Robotics Integration Team (JGRIT) 15 NOV 2016
RAS Integrated Concept Development Team (ICDT) Kick Off Meeting 28 NOV 2016
Robotics Community of Practice (COP) Meeting 21-22 NOV 2016
JGRIT / Robotics COP 21-23 FEB 2017
RAS Implementation Plan Review w/ MRD 18 Jan 2017
Extended Warfighter Experiment JAN-JUN 2017
R2V2 Experiment JUN 2017
ALE/Wingman Experiment SEP 2017
FY18Oct Jan Apr Jul OctFY17
Joint Material / Combat Developer ForumArmy Material / Combat Developer, S&T, Test Community ForumMUM-T User Experiment 2016 ASB Study
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

Robotic Operating System (ROS)
19
Phase I: Concept Exploration
Phase II: Concept Definition
Phase III: Detailed Implementation Planning
& Execution
• Refined Concept Definition Report• Community of Interest for ROS-M
Development• Technical Implementation Suggestions• ROS-M Business considerations
• Alpha ROS-M Security Features• Alpha ROS-M Repo & Registry • Initial ROS-M Components• Prototype Demonstration
• Determine scope of project• Identify potential programmatic
and technical issues• Identify potential business models
Future Development:
Further Refinement & Development
Complete Complete Funded
Phase III Partners:
ROS 2.0
ROS-SE
ROS-M Core
ROS-SE is DARPA project securing ROS 2.0
ROS 2.0 in pre-release, improves upon ROS
• ROS-M to be built upon ROS-SE, cover additional STIG/IA/Military Specific requirements
• DOE would like to participate and cost share
ROS-M Core• ROS is a collection of software frameworks for robot software development providing operating system-like functionality on a node-cluster format
• ROS is open source and used by the majority of robotics developers in industry and academia
• The Army is adapting ROS to be the baseline software development framework for future autonomous behaviors by creating ROS-Military (ROS-M) for military specific applications
• ROS 2.0 (Final) will add Real Time Operating System (RTOS) capability to ROS.
ROS-M Development Phases
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

Remote Reconnaissance Vehicle Version 2 (R2V2)
22
Polaris MRZR Flat Deck Unmanned Ground Vehicle (UGV) with Hoverfly tethered UAS - Teleoperation UGV
Hatch folds forward for optionally manned
capability
Tethered UAS launch/landing area
with netting for lateral stability
during movements
Sensor suite out of manned driver view and T-UAS
landing area
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

Wingman Safety Certification Spiral
23
Proposed Wingman JCTD
RDTE 6.4
- Military User Assessment of maneuver operations with soldiers at NTC/JRTC
- First safety-released weaponized, semi-autonomous UGV through ATEC
- Improved autonomous behaviors and weapon control systems
- First unmanned system certified on Army gunnery course.
- Company size MUM-T unit for Military User Assessment
- Technical data package for autonomous detecting and tracking targets / Wingman autonomous behaviors/RWS gov’t owned(data rights)
- Safety release particulars for weaponized tracked unmanned systems through ATEC
Safety Certification for Light Machine Gun (7.62 mm) + Ackermann Steering (Wheeled Vehicle)
Safety Certification for Heavy Machine Gun (0.50 Cal) + Pivot Steering (Tracked Vehicle)
- CONOPS and TTPs for armed manned-unmanned teaming
- Military User Assessment of maneuver operations with soldiers at NTC/JRTC
- Technical data package for autonomous detecting and tracking targets / Wingman autonomous behaviors/RWS gov’t owned (data rights)
- Safety release particulars for weaponized unmanned systems through ATEC
Target Acquisition and Tracking Warfighter in the Loop (WIL) Automated TargetingWide FOV Target Detection Self Correcting Fire control
Target Acquisition and Tracking WIL Automated Targeting Wide FOV Target Detection Self Correcting Fire control
(Final Scope/Platform under Review)
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED

Urban UnitDistribution
Aerial Distribution
Aerial Distribution
BSA
Multi Modal Distribution Company (MMD)Combined Logistics Staging Area
Observation Post
Ground Distribution
Semi-Autonomous Elements
UAS for SA/Comms Relay
Obtaining Assured Sustainment: Multi-Modal Approach
DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED