Effects of Compound 𝐾-Distributed Sea Clutter on Angle...
20
Research Article Effects of Compound -Distributed Sea Clutter on Angle Measurement of Wideband Monopulse Radar Hong Zhu, Yujian Pan, Weiwei Wu, Ning Tai, and Naichang Yuan College of Electronic Science and Engineering, National University of Defense Technology, Changsha 410073, China Correspondence should be addressed to Hong Zhu; [email protected] Received 17 January 2017; Revised 8 April 2017; Accepted 20 April 2017; Published 24 May 2017 Academic Editor: Benjamin Ivorra Copyright © 2017 Hong Zhu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. e effects of compound K-distributed sea clutter on angle measurement of wideband monopulse radar are investigated in this paper. We apply the conditional probability density function (pdf) of monopulse ratio (MR) error to analyze these effects. Based on the angle measurement procedure of the wideband monopulse radar, this conditional pdf is first deduced in detail for the case of compound -distributed sea clutter plus noise. Herein, the spatial correlation of the texture components for each channel clutter and the correlation of the texture components between the sum and difference channel clutters are considered, and two extreme situations for each of them are tackled. Referring to the measured sea clutter data, angle measurement performances in various K-distributed sea clutter plus noise circumstances are simulated, and the effects of compound K-distributed sea clutter on angle measurement are discussed. 1. Introduction Monopulse, which uses the sum and difference beams to estimate the direction of arrival (DOA) of targets, is a matured technique of target angle measurement. Monopulse radars are widely used in target tracking area because of their superior angular accuracy and powerful antijamming performance [1, 2]. However, when monopulse radar is used to track the targets on the sea, two problems occur. On the one hand, sea clutter lowers the signal-clutter-noise ratio (SCNR), which thereby decreases the radar detection probability and the angle measurement accuracy. On the other hand, multipath propagation makes the target and its image appear simultaneously in the main lobe of radar, which causes acute errors in the angle measurement of targets [2–4]. A complex target can be represented as a set of separate scattering centers. For wideband monopulse radar, since the range resolution is very high, these scattering centers can be effectively separated within different range resolution cells. erefore, the wideband monopulse radar is used to restrain the angular glint effectively [5–7]. On the other hand, for the multipath propagation, the time delay of a target is smaller than its image. e wideband radar can use its advantage of high resolution to resolve the target and its image in the range profiles. us, the multipath interference is controlled significantly [8, 9]. Due to all the advantages mentioned above, in recent years, the wideband monopulse radars are widely applied in various scenarios. In the monopulse radar system, the angular information of a target is extracted from the monopulse ratio (MR), which is the ratio of the difference channel and the sum channel phasors. For the monopulse radar designers, it is useful to learn the statistical properties of MR to have a comprehensive understanding of the angle measurement performance. us, the statistical properties of MR were studied in many literatures [10–13]. In the literatures [10, 11], Seifer found an ingenious way to quantify the angular accuracy by calculating the mean and covariance of the real part of the MR in condition that the sum channel amplitude exceeds a detection threshold. Nonfluctuating and fluctuating target cases were considered and compared. In [12], Groves obtained the joint distribution of the real and imaginary parts of the MR with arbitrarily correlated Gaussian noise. Using the general result, the thresholding was considered and the marginal density function of the real part of the MR was derived for the case of real correlation between the channels. In order to obtain more general statistical properties, in [13], Chaumette presented the statistical prediction of monopulse Hindawi Mathematical Problems in Engineering Volume 2017, Article ID 2081718, 19 pages https://doi.org/10.1155/2017/2081718
Transcript of Effects of Compound 𝐾-Distributed Sea Clutter on Angle...

Research ArticleEffects of Compound 119870-Distributed Sea Clutter on AngleMeasurement of Wideband Monopulse Radar
Hong Zhu Yujian Pan Weiwei Wu Ning Tai and Naichang Yuan
College of Electronic Science and Engineering National University of Defense Technology Changsha 410073 China
Correspondence should be addressed to Hong Zhu zhuhong13nudteducn
Received 17 January 2017 Revised 8 April 2017 Accepted 20 April 2017 Published 24 May 2017
Academic Editor Benjamin Ivorra
Copyright copy 2017 Hong Zhu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The effects of compound K-distributed sea clutter on angle measurement of wideband monopulse radar are investigated in thispaperWe apply the conditional probability density function (pdf) of monopulse ratio (MR) error to analyze these effects Based onthe angle measurement procedure of the wideband monopulse radar this conditional pdf is first deduced in detail for the case ofcompound 119870-distributed sea clutter plus noise Herein the spatial correlation of the texture components for each channel clutterand the correlation of the texture components between the sum and difference channel clutters are considered and two extremesituations for each of them are tackled Referring to the measured sea clutter data angle measurement performances in variousK-distributed sea clutter plus noise circumstances are simulated and the effects of compound K-distributed sea clutter on anglemeasurement are discussed
1 Introduction
Monopulse which uses the sum and difference beams toestimate the direction of arrival (DOA) of targets is amatured technique of target angle measurement Monopulseradars are widely used in target tracking area because oftheir superior angular accuracy and powerful antijammingperformance [1 2] However when monopulse radar is usedto track the targets on the sea two problems occur Onthe one hand sea clutter lowers the signal-clutter-noiseratio (SCNR) which thereby decreases the radar detectionprobability and the angle measurement accuracy On theother hand multipath propagation makes the target and itsimage appear simultaneously in themain lobe of radar whichcauses acute errors in the anglemeasurement of targets [2ndash4]
A complex target can be represented as a set of separatescattering centers For wideband monopulse radar since therange resolution is very high these scattering centers can beeffectively separated within different range resolution cellsTherefore the wideband monopulse radar is used to restrainthe angular glint effectively [5ndash7] On the other hand for themultipath propagation the time delay of a target is smallerthan its image The wideband radar can use its advantageof high resolution to resolve the target and its image in the
range profiles Thus the multipath interference is controlledsignificantly [8 9] Due to all the advantages mentionedabove in recent years the wideband monopulse radars arewidely applied in various scenarios
In the monopulse radar system the angular informationof a target is extracted from the monopulse ratio (MR)which is the ratio of the difference channel and the sumchannel phasors For the monopulse radar designers it isuseful to learn the statistical properties of MR to have acomprehensive understanding of the angle measurementperformance Thus the statistical properties of MR werestudied in many literatures [10ndash13] In the literatures [1011] Seifer found an ingenious way to quantify the angularaccuracy by calculating the mean and covariance of the realpart of the MR in condition that the sum channel amplitudeexceeds a detection thresholdNonfluctuating andfluctuatingtarget cases were considered and compared In [12] Grovesobtained the joint distribution of the real and imaginary partsof the MR with arbitrarily correlated Gaussian noise Usingthe general result the thresholding was considered and themarginal density function of the real part of the MR wasderived for the case of real correlation between the channelsIn order to obtain more general statistical properties in [13]Chaumette presented the statistical prediction of monopulse
HindawiMathematical Problems in EngineeringVolume 2017 Article ID 2081718 19 pageshttpsdoiorg10115520172081718
2 Mathematical Problems in Engineering
angle measurement where the target fluctuation law wasunknown and multiple observations were available And theauthor successfully derived simple expression of conditionalmean and variance of the MR for the case that only a singleobservation was required and the threshold detection wasachieved
The above research results can effectively describe thestatistical properties of MR in many cases They are veryinstructive for radar designers Those researches mainlydiscussed the narrowband monopulse radar and assumedthat the target was an ideal point target Only the effectsof Gaussian noise on the MR were considered Howeverwhen the wideband monopulse radar is applied to track thecomplex targets on the sea the target returns are spreadwithin different range resolution cells Other different anglemeasurementmethods now need to extract the target angularinformationMeanwhile the presence of sea clutter will influ-ence the angle measurement performance In such cases theabove research results are no longer appropriate to describethe statistical properties of MR of wideband monopulseradar
Fortunately the clutter returns for high resolution radarscan bewellmodeled by the compoundGaussianmodel whichconsists of the product of two components called ldquotexturerdquoand ldquospecklerdquo In this compound Gaussian model the localmean level of the speckle component is determined by thetexture component When the local mean level is giventhe clutter can be regarded as the Gaussian distributionThe similar procedure presented by Seifer in literatures [1011] can now be applied to obtain the local distribution ofMR This local distribution of MR is then averaged over allpossible values of the local mean level to compute the overalldistribution of MR Encouraged by this we focus on theeffects of sea clutter on angle measurement performance ofwideband monopulse radar
In the wideband monopulse radar system the high reso-lution range profile (HRRP) of sum channel is firstly appliedto accomplish the extended target detection and the posi-tions of the range cells of the target are determined in theHRRP Then the corresponding HRRP returns in the sumand the difference channels are utilized to extract the angleof every one of the range cells of the target till the anglesof all range cells are obtained Lastly the geometrical centerangle of the target can be calculated by smoothing all anglesAccording to this procedure the method presented in [1011] is developed to deduce the mathematical expression ofconditional pdf ofMRerror for Rayleigh fluctuating extendedtarget in the background of compound K-distributed seaclutter plus noise Using this conditional pdf the MR con-ditional root mean square error (RMSE) the conditionalmean and standard deviation (STD) of theMR error are thenobtained to evaluate the angle measurement performanceSpecifically considering that the clutter may exhibit the cor-relation characteristics in the widebandmonopulse radar thespatial correlation of the texture components for each channelclutter and the correlation of the texture components betweenthe sum and difference channel clutters are considered indiscussion and two extreme situations are tackled for eachof them
The rest of the paper is organized as follows the basicsof statistical analysis including the radar returns model thecompound 119870-distribution model and the binary detectorare introduced in Section 2 In Section 3 we deduce theconditional pdf of MR error when the target is submerged inthe compound 119870-distributed sea clutter and noise Throughnumerical simulation method effects of binary detectorrsquosparameters and K-distributed clutter on the angle mea-surement performance are analyzed in Section 4 FinallySection 5 concludes the paper
2 Basics of Statistical Analysis
21 Wideband Monopulse Radar Returns The radar returnsin the sum and difference channels can be respectivelyexpressed as
119904119898 = 119904119898 + 119888119904119898 + 119899119904119898119889119898 = 119889119898 + 119888119889119898 + 119899119889119898119898 = 1 119867(1)
where119867 is the number of the range cells of the target 119904119898 and119889119898 are the target returns in the sum and difference channelsrespectively when the clutter and noise are absent 119888119904119898 and119888119889119898 are the clutter components in the sum and differencechannels respectively and 119899119904119898 and 119899119889119898 are the noise compo-nents in the sum and difference channels respectively In thispaper the noise components are the complexGaussian noiseswith zero mean and variance 1205902119899119904 for sum channel and 1205902119899119889 fordifference channel The target returns clutter and noise areassumed to be statistically independent
A variety of theoretical distribution functions (RayleighWeibull 119870 Pareto etc) were proposed to model the pdf ofthe amplitude of non-Gaussian sea clutter [14ndash16] Amongthese distributions the compound 119870-distribution is widelyused to model the clutter and many existing contributionsanalyzed the radar performance considering the compound119870-distributed clutter [17ndash20] For the sea clutter both in thesum and difference channels the compound 119870-distributioncan not only depict the amplitude distribution accurately butalso explain the scattering mechanism of sea clutter wellAccording to the compound119870-distribution the clutter can beinterpreted as the product of two independent componentssuch that
119888 = 119910119909 (2)
where 119909 is the speckle and 119910 is the texture which isnonnegative random process The mean level of the specklecomponent is modulated by the texture component The tex-ture and speckle are considered to be independent processesTherefore the pdf of compound119870 distributed sea clutter canbe expressed as
119901 (|119888|) = intinfin0119901 (|119888| | 119910) 119901 (119910) 119889119910 (3)
Mathematical Problems in Engineering 3
where |119888| is the amplitude of the sea clutter 119901(|119888| | 119910) is thepdf of the speckle component and can be given by
119901 (|119888| | 119910) = 2 |119888|11991021205902119888 exp(minus |119888|211991021205902119888 ) (4)
where 1205902119888 = 119875119888 and 119875119888 is the average power of sea clutter Thepdf of 119910 can be written as
119901 (119910) = 2VVΓ (V)1199102Vminus1 exp (minusV1199102) (5)
where Γ(sdot) is Gamma function and V is the clutter shapeparameter which embodies the clutter fluctuation degreeThus the clutter in the sum and difference channels areexpressed as 119888119904119898 = 119910119904119898119909119904119898 and 119888119889119898 = 119910119889119898119909119889119898 respectivelyAnd the clutter average powers are denoted as 1205902119888119904 and 1205902119888119889 andthe shape parameters are denoted as V119888119904 and V119888119889
It is assumed that the target returns in all resolution cellsare randomly fluctuating and follow the same distributionTheir amplitude pdfs are Rayleigh distributions and theirphase pdfs are uniform distributions So 119904119898 is a complexGaussian random variable with zero mean Its average poweris 1198602119898 We assume that forall119898 119899 isin [1119867] 1198602119898 = 1198602119899 = 1198602 Thusthe target SCNR in the sum channel can be written as
120594SCNR = 119864 100381610038161003816100381611990411989810038161003816100381610038162119864 1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 = 11986021205902119888119904 + 1205902119899119904 (6)
where 119864sdot denotes expectation operator Additionally thetarget conditional SCNR in the sum channel can be rewrittenas
1205942 = 119864 100381610038161003816100381611990411989810038161003816100381610038162 | 119910119904119898119864 1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 | 119910119904119898 = 119860211991021199041198981205902119888119904 + 1205902119899119904= 1205902119888119904 + 120590211989911990411991021199041198981205902119888119904 + 1205902119899119904120594SCNR
(7)
where 119910119904119898 is the clutter texture in the sum channel
22 Binary Detector In the wideband radar system thebinary detector is employed for the effective detection of anextended target in sea clutter because it can significantlydecrease the false alarm probability induced by the sea spikes[21ndash24] The binary detector is comprised of two stages Thefirst stage is essentially a simplified version of the likelihoodratio test (LRT)where a detection threshold119879 is set accordingto the quiescent clutter and noise levels For the 119898th rangecell the detector output is set to either 1 or 0 according to10038161003816100381610038161199041198981003816100381610038161003816 ⋛ 119879 997891997888rarr ℎ(1)119898 (8)
During this stage all range cell returns are quantified as 1 or0 The second stage detection operates upon these binary-detected range returns and a range sliding window 119873-of-119875 detector is used Suppose that 119870 range cell returns are
sampled We denote that 119895 isin 0 1 119870 minus 119875 + 1 and119872 =sum119895+119875minus1119898=119895 ℎ(1)119898 Then this stage is accomplished as
119872 ⋛ 119873 997891997888rarr ℎ(2)119898 (9)
If119872 ge 119873 this indicates the presence of a target in this rangesliding window and thus ℎ(2)119898 = 1 otherwise this indicatesthat the target is not present and thus ℎ(2)119898 = 0 Generally thelength of range sliding window is not shorter than the size oftarget
For the high resolution radar the sizes of range cellsare smaller than the scales of large features on the seasurface Therefore the correlation between the sea clutterfrom adjacent range cells that is the spatial correlation isgenerally more pronounced Modeling of the spatial corre-lation characteristics is very important for accurate perfor-mance prediction of binary detector For the compound 119870-distribution the spatial correlation can be characterized bythe correlation properties of the texture and speckle Due tothe absence of oversampling the speckle can be considereddecorrelated from one range cell to the next Here onlytwo bounding cases of spatial correlation for the texture arediscussed
As given in Table 1 by Watts [25] the spatial correlationlength of clutter in the different sea states is several to dozensof meters When the length of range sliding window is muchlarger than the spatial correlation length of clutter it can beassumed that the texture samples are independent within therange sliding window This case is denoted as the spatiallyindependent texture case On the contrary when the lengthof range sliding window is smaller than the spatial correlationlength of clutter it can be assumed that the texture samplesare completely correlated in the range sliding window Thiscase is denoted as the spatially correlated texture case
For the spatially independent texture case the false alarmprobability of the first stage detection denoted as 1198751198911 can beexpressed as
1198751198911 = intinfin119879intinfin0119901 (10038161003816100381610038161198881199041198981003816100381610038161003816 | 119910s119898) 119901 (119910119904119898) 119889119910119904119898119889 10038161003816100381610038161198881199041198981003816100381610038161003816
= intinfin0
exp(minus |119879|211991021199041198981205902119888119904 + 1205902119899119904)119901 (119910119904119898) 119889119910119904119898(10)
where 119901(119910119904119898) is the pdf of 119910119904119898 given by (5) Thus theoverall false alarm probability for the binary detector can becomputed by summing over the false alarm occurrences ofthe binomial pdf as
1198751198651 = 119875sum119898=119873
1198621198751198981198751198981198911 (1 minus 1198751198911)119875minus119898 (11)
where 119862119875119898 is the number of combinations of 119875 items taken119898at a timeThe detection probability of the first stage detectioncan be obtained as1198751198891 = 119901119889 10038161003816100381610038161199041198981003816100381610038161003816 ge 119879= intinfin0
exp(minus |119879|2(1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904))119901 (119910119904119898) 119889119910119904119898(12)
4 Mathematical Problems in Engineering
Similar to the computation of the overall false alarm proba-bility the overall detection probability for the binary detectorcan be expressed as
1198751198631 = 119901119889 119872 ge 119873 = 119875sum119898=119873
1198621198751198981198751198981198891 (1 minus 1198751198891)119875minus119898 (13)
However for the spatially correlated texture case 119910119904119898is constant within the range sliding window but variesevidently with range sliding window locations Hence thecalculating methods of the overall false alarm probabilityand the overall detection probability in this case are differentfrom those in the independent texture case For the first stagedetection given the local mean level value 119910119904119898 the local falsealarm probability 1198751198912 and detection probability 1198751198892 can becomputed as
1198751198912 = intinfin119879119901 (10038161003816100381610038161198881199041198981003816100381610038161003816 | 119910119904119898) 119889 10038161003816100381610038161198881199041198981003816100381610038161003816
= exp(minus |119879|211991021199041198981205902119888119904 + 1205902119899119904) (14)
1198751198892 = 119901119889 10038161003816100381610038161199041198981003816100381610038161003816 ge 119879 | 119910119904119898= exp(minus |119879|2(1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904))
(15)
Then the overall probability of false alarm and detection forthe binary detector can be computed by summing over thelocal probabilities of false alarm and detection of the binomialpdf and then by averaging over all possible values of the localmean level They are given by
1198751198652 = intinfin0
119875sum119898=119873
1198621198751198981198751198981198912 (1 minus 1198751198912)119875minus119898 119901 (119910119904119898) 119889119910119904119898 (16)
1198751198632 = 119901119889 119872 ge 119873= intinfin0
119875sum119898=119873
1198621198751198981198751198981198892 (1 minus 1198751198892)119875minus119898 119901 (119910119904119898) 119889119910119904119898 (17)
Once the overall false alarm probability and the parametersof binary detector are given the detection threshold of theLRT in the first stage detection can be determined by (10)and (11) for the spatially independent texture case and by (14)and (16) for the spatially correlated texture case Then theaggregated detection probabilities in both these two cases canbe computed
3 Angle Measurement Performance ofWideband Monopulse Radar
31 Angle Measurement Error of Wideband Monopulse RadarWithout loss of generality we do not consider the imple-mentation type of the monopulse radar In a practical envi-ronment the received radar signal usually contains clutternoise and interferenceTheMR is a complex number In realapplications the real part of the complexMR(CMR) is widely
used to extract the angle of arrival (DOA) of a target whichis defined as [1 10]
119903 = Re119889119904 (18)
where 119904 and 119889 respectively are the complex-valued samplesof receiving signals simultaneously obtained from the sumand difference channels Resdot denotes the real part of acomplex value 119903 is the monotone function of DOA 120579 of theobserved target Usually the relationship between 119903 and 120579 canbe approximated by a linear function namely
120579 asymp 120579BW119896119898 119903 (19)
where 120579BW is the 3 dB beamwidth of the sum pattern and 119896119898denotes monopulse slope
We assume that 119872 range cell returns are determined tohave the probable presence of a target and the presence of atarget is determined by the detection process According to(18) and (19) we can obtain the angle value 120579119898 for each rangecell of target The geometrical center angle of target is thenacquired by weighting processing on all angle values that is
120579 = 119872sum119898=1
120572119898120579119898 (20)
where 120572119898 is weighting operatorThe commonly used weight-ing operators include uniform weighting linear weightingand power weighting To simplify the analysis the uniformweighting method is adopted that is 120572119898 = 1119872
When clutter and noise are absent the MR in the 119898thrange cell is denoted as 120578119898 = 119889119898119904119898 It is a real number Themonopulse slope 119896119898 is assumed to be constant for all rangecell returns from the same targetThus according to (20) theMR associated with the real geometrical center angle of targetcan be written as
120578 = 1119872 119872sum119898=1120578119898 = 1119872 119872sum119898=1119889119898119904119898 (21)
The flare angle of target and the corresponding MR aredenoted as Δ120579 and Δ120578 respectively Δ120579 is related to the targetsize and the radar working range When radar works in thefar field we can use the approximations Δ120579 asymp 0 and 120578119898 asymp 120578Here the angle measurement error induced by the flare angleof target is ignored When the target return is submerged inthe sea clutter and noise the CMR of target return of singlerange cell is denoted as
120578119898 = 119889119898119904119898 = 119889119898 + 119888119889119898 + 119899119889119898119904119898 + 119888119904119898 + 119899119904119898 (22)
Then the CMR error of target can be expressed as
120576 = 1119872 119872sum119898=1120578119898 minus 1119872 119872sum119898=1120578119898 = 1119872 119872sum119898=1(119889119898119904119898 minus 119889119898119904119898 )= 1119872 119872sum119898=1120576119898
(23)
Mathematical Problems in Engineering 5
where 120576119898 is the CMR error of single range cell By using 120578119898 asymp120578 120576119898 can be expressed as
120576119898 = 119889119898119904119898 minus 119889119898119904119898 asymp (119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)119904119898 + 119888119904119898 + 119899119904119898 (24)
The denominator in (24) is denoted as 119878119898 = 119904119898+119888119904119898+119899119904119898 andthe numerator is denoted as119863119898 = (119888119889119898 +119899119889119898) minus 120578(119888119904119898 +119899119904119898)Here119863119898 represents the error sources of angle measurementincluding the clutter and noise in both the sum and differencechannels Moreover the contribution of (119888119889119898 + 119899119889119898) to theerror is given by (119888119889119898 + 119899119889119898)(119904119898 + 119888119904119898 + 119899119889119898) and thecontribution of (119888119904119898 + 119899119904119898) to the error is given by 120578(119888s119898 +119899119904119898)(119904119898 + 119888119904119898 + 119899119889119898) The effect of the clutter plus noise ofsum channel is related to the location of target in the beamThen we can get 119864[119878119898] = 0 and 119864[119863119898] = 0 The conditionalvariances of 119878119898 and119863119898 can be represented as
119886 = radic12 (119864 [1003816100381610038161003816119863119898 minus 119864 [119863119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12 [11991021198891198981205902119888119889 + 1205902119899119889 + 1205782 (11991021199041198981205902119888119904 + 1205902119899119904) minus 21205881120578119910119904119898120590119888119904119910119889119898120590119888119889]
119887 = radic12 (119864 [1003816100381610038161003816119878119898 minus 119864 [119878119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12119864 1003816100381610038161003816119904119898 + 119888119904119898 + 11989911990411989810038161003816100381610038162 = radic12 (1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904)
(25)
where 1205881 is the real part of conditional correlation of clutterbetween the sum and the difference channels This condi-tional correlation can be represented as
1205851 = 1205881 + 1198951205891 = 119864 119888lowast119904119898119888119889119898 | 119910119904119898 119910119889119898radic119864 119888lowast119904119898119888119904119898 | 119910119904119898radic119864 119888lowast119889119898119888119889119898 | 119910119889119898= 119864 119910119904119898119910119889119898119909lowast119904119898119909119889119898 | 119910119904119898 119910119889119898119910119904119898119910119889119898120590119888119904120590119888119889 = 119864 119909lowast119904119898119909119889119898120590119888119904120590119888119889= 120585119909
(26)
where 1205891 is imaginary part of 1205851 1205881 and 1205891 are bounded by12058821 + 12058921 le 1 120585119909 is the correlation between the specklesof the sum and the difference channels The superscript lowastdenotes the conjugate operation From (26) we observe thatthe conditional correlation 1205851 is equivalent to the specklecorrelation 120585119909 Then the conditional correlation between 119878119898and119863119898 is given by
120585120576 = 119864 (119904119898 + 119888119904119898 + 119899119904119898)lowast [(119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)] | 119910119904119898 1199101198891198982119886119887 = 1199101199041198981205901198881199042119886119887 (1205881119910119889119898120590119888119889 minus 120578119910119904119898120590119888119904)+ 1198951199101199041198981199101198891198981205901198881199041205901198881198892119886119887 1205891 = 120588120576 + 119895120589120576 (27)
where 120588120576 and 120589120576 are the real and imaginary parts of 120585120576respectively and are bounded by 1205882120576 + 1205892120576 le 1 It should benoted that 120588120576 and 120589120576 have 119910119904119898 and 119910119889119898 dependencies but theyare constant in the Gaussian noise case
32 Exact Solution for Conditional pdf of MR Error Let usdefine
119871119898 = 10038161003816100381610038161199041198981003816100381610038161003816radic119864 [1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 | 119910119904119898] (28)
Denote119876120576119898 = 119863119898119878119898 The CMR error 119902120576 can be representedby the terms of its real and imaginary parts namely 119902120576119898 =119903120576119898 + 119895119905120576119898 Thus the joint pdf of 119876120576119898 and 119871119898 can berepresented as follows [10]
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898) = 211989731198981205871205832 (1 + 1205942)2times exp(minus[ 1198972119898(1 + 1205942) + 1198972119898(1 + 1205942) 1205832 (119903120576119898 minus 119886119887120588120576)2+ 1198972119898(1 + 1205942) 1205832 (119905120576119898 minus 119886119887 120589120576)2])
(29)
where 1205942 120588120576 120589120576 119886 and 119887 are defined previously and
120583 = 119886119887radic1 minus 1205882120576 minus 1205892120576 (30)
It should be noted that the variation of the underlying powerdue to the 119870-distribution assumption now causes the pdf in(29) to have 119910119904119898 and 119910119889119898 dependencies
At the first stage of detection process Δ 1 = |119904119898| ge 119879denotes the event that the radar return of single range cellin the sum channel exceeds the detection threshold 1198970 =119879radic119864[|119888119904119898 + 119899119904119898|2 | 119910119904119898] denotes the detection threshold ofthe LRT normalized with respect to the conditional root-mean-squared sum channel clutter plus noise power Itshould be noted that the normalized values of 119871119898 and 1198970 alsohave a 119910119904119898 dependence under the119870-distribution assumptionThe resulting distribution conditioned on the occurrence ofevent Δ 1 is then obtained by integrating with respect tovariables 119905120576119898 and 119897119898 as follows
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898 Δ 1)= 1205832119875119889radic120587119861minus32
6 Mathematical Problems in Engineering
times radic1205872 [[[1 minus erf( 1198611198970120583radic(1 + 1205942))]]]
+ 1198611198970120583radic(1 + 1205942) exp[minus119861211989720(1 + 1205942) 1205832]
= 119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)119875119889
(31)
where 119861 = 1205832 + (119903120576119898 minus (119886119887)120588120576)2 erf(119911) = (2radic120587) int1199110 119890minus1199052119889119905 iserror function and 119875119889 = 119875|119904119898| ge 119879 | 119910119904119898 is the detectionprobability with the given 119910119904119898 during the first stage detection
Analogous to the effect on the detection performance thespatial correlation of clutter also affects angle measurementperformance of radar We assume that the spatial correlationof the difference channel clutter is the same as the one of thesum channel clutter In the spatially independent texture casethe value of 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1) is averaged over all
possible values of 119910119904119898 and 119910119889119898 to compute the conditionalpdf of MR error of single range cell return of target (denotedby 119901119877120576119898(119903120576119898 | Δ 1)) that is
119901119877120576119898 (119903120576119898 | Δ 1) = 11198751198891sdot intinfin0intinfin0119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)
sdot 119901 (119910119904119898 119910119889119898) 119889119910119904119898119889119910119889119898(32)
where 1198751198891 is the detection probability of the first stagedetector in the spatially independent texture case and is givenby (12) 119901(119910119904119898 119910119889119898) is the joint pdf of 119910119904119898 and 119910119889119898
It is assumed that119872 range cell returns have been detectedto determine the probable presence of a target in the localrange region [119895 119895 + 119875 minus 1) at the first stage of detectionprocessing Let 119901(119903120576 | 119872) denote the conditional pdf ofMR error when119872 range cell returns are used to extract theDOA of target It can be assumed that for each range cell119901119877120576119898|Δ 1(119903120576119898) is independent and obeys the distribution in(32) Denoting 119903120576_sum = sum119872119898=1 119903120576119898 and 119903120576 = 119903120576_sum119872 theconditional pdf of 119903120576_sum can be computed as [26]
119901sum (119903120576_sum | 119872) = 1199011198771205761 (1199031205761 | Δ 1) otimes 1199011198771205762 (1199031205762 | Δ 1) otimes sdot sdot sdot otimes 119901119877120576119872 (119903120576119872 | Δ 1) (33)
where otimes is convolution operation Thus we can obtain 119901(119903120576 |119872) = 119872119901sum(119872119903120576 | 119872) Additionally the probability of119872times occurrences of the event Δ 1 at the first stage detectionprocessing can be written as 119901119889119872 = 1198621198751198721198751198721198891 (1 minus 1198751198891)119875minus119872Then we can obtain that
119901 (119903120576119872) = 119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus119872 (34)
At the second stage of detection processing Δ 2 = 119872 ge119873 is denoted as the event of the target presence For theindependent texture case the pdf ofMR error under the eventΔ 2 can then be expressed as
119901119877120576|Δ 2 (119903120576) = 119901 (119903120576119872 ge 119873)119901119889 (119872 ge 119873)= sum119875119872=119873119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus1198721198751198631 (35)
where 1198751198631 is the overall detection probability in the spatiallyindependent texture case and is given by (13)
In the spatially correlated texture case the derivationprocess of the conditional pdf of MR error is similar tothat in the spatially independent texture case The analogousformulas with (33) (34) and (35) can be obtained by thesimple substitutions of 1198751198892 and 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1)for 1198751198891 and 119901119877120576119898(119903120576119898 | Δ 1) and they are denoted by 119901(119903120576 |119872 119910119904119898 119910119889119898) 119901(119903120576119872 | 119910119904119898 119910119889119898) and 119901(119903120576 | 119910119904119898 119910119889119898)They have 119910119904119898 and 119910119889119898 dependencies Therefore the overallconditional pdf of MR error for the spatially correlated
texture case is computed by averaging the MR errors over allpossible values of 119910119904119898 and 119910119889119898 that is
119901119877120576|Δ 2 (119903120576) = intinfin0intinfin0119901119877120576|Δ 2 (119903120576 | 119910119888119904 119910119888119889)
sdot 119901 (119910119888119904 119910119888119889 | Δ 2) 119889119910119888119904119889119910119888119889 = 11198751198632sdot intinfin0intinfin0
119875sum119872=119873
119862119875119872119901 (119903120576 | 119872 119910119888119904 119910119888119889)sdot 1198751198721198892 (1 minus 1198751198892)119875minus119872 119901 (119910119888119904 119910119888119889) 119889119910119888119904119889119910119888119889
(36)
where 1198751198892 and 1198751198632 are the first and second stage detectionprobabilities in the spatially correlated texture case and aregiven by (15) and (17) respectively
In the above analysis the joint pdf119901(119910119904119898 119910119889119898) is involvedThis pdf describes the distribution of the clutter texturesof the sum and difference channels within the same rangecell Generally the clutter returns in the sum and differencechannels are from the scattering of the common illuminatingsea surface region Hence the correlation of the texturecomponents of the sea clutter between the sum and differencechannels within the same range cell is also pronouncedMoreover because the directions of the sum and differencepatternmain lobes are not consistent and the clutter intensityis dominated by the antenna pattern gain the texture cor-relations are different for different range cells Herein twobounding situations (ie 119910119904119898 and 119910119889119898 are independent and
Mathematical Problems in Engineering 7
are completely correlated) are considered separately When119910119904119898 and 119910119889119898 are independent 119901(119910119904119898 119910119889119898) can be separatedand can be rewritten as 119901(119910119904119898 119910119889119898) = 119901(119910119904119898)119901(119910119889119898) When119910119904119898 and 119910119889119898 are completely correlated the values of 119910119904119898 and119910119889119898 within the same range cell are the same All involvingpdfs of monopulse angle measurement errors have only a 119910119904119898dependence Therefore the double integrals in (32) and (36)are reduced to the single integral
We wish to determine the error in an estimate of targetangle due to the clutter and noise Using (35) and (36) theconditional moments of 119903120576 are then given by
119864 [119903119899120576 | Δ 2] = intinfinminusinfin
119903119899120576119901119877120576|Δ 2 (119903120576) 119889119903120576 119899 = 1 2 (37)
For 119899 is equal to unity and two the first and second momentsof 119903120576 can be obtained by integrating (37) which are denotedas 119864[119903120576 | Δ 2] and 119864[1199032120576 | Δ 2] respectively Also the firstmoment is named the mean error (bias) Although each ofthe clutter and noise variables has a distribution with zeromean value the mean error is not zero and it cannot exceedthe width of the main lobe The square root of the secondmoment is named the RMSE and is denoted by Υ[119903120576 | Δ 2]In practice the RMSE is desired to measure the error and itis widely used to assess the performance for various kinds ofmeasurement results It is the combined effect of the meanerror and the STD from thismean errorThe conditional STDof 119903120576 is denoted as 120590[119903120576 | Δ 2] and it can be obtained from
1205902 [119903120576 | Δ 2] = 119864 [1199032120576 | Δ 2] minus (119864 [119903120576 | Δ 2])2 (38)
It is interesting to note that in theory this conditional STDof 119903120576 is infinite when the condition of Δ 2 is removed [1 10]In actual practice however the conversion from monopulseratio to angle is implemented as being within the main lobeand the target is also presumed to be within the main lobeThe conditional STD of 119903120576 is finite and its maximum possiblevalue is of the order of the beamwidth Consequently Υ[119903120576 |Δ 2] is also finite and its maximum possible value is of theorder of the beamwidth In our discussion Υ[119903120576 | Δ 2] isapplied to assess the performance of the angle measurementof wideband monopulse radar in clutter plus noise and 119864[119903120576 |Δ 2] and 120590[119903120576 | Δ 2] are applied to determine the maincontributions of the clutter and noise to angle error
4 Simulation Results and Analysis
41 Optimal Binary Detection Good detection performanceand angle measurement accuracy are two main goals ofwideband monopulse radar design Generally only whenthe target appears in the detected result the processingof monopulse angle measurement is carried out Hereinthe detection performance of the binary detector is firstlyanalyzed in the background of 119870-distributed sea clutter plusGaussian noise As in the researches [22 27] the optimalparameter settings are defined as the values of the binarydetector parameters which make the detector establish agiven detection probability at a given false alarm probabilitywith the least SCNR It is assumed that the parameter 119875 of
binary detector in our simulations is optimal According tothe results given in [22] it can be set to be equal to the targetradial length This optimal value of 119875 is denoted as 119875opt
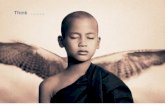
The 119870-distributed sea clutters are generated by usingthe spherically invariant random process (SIRP) methodThe 20000 Monte Carlo experiments are conducted Inthe simulation the overall false alarm probability is set to10minus4 and the required detection thresholds of the LRT arecomputed theoretically by (10) and (11) for the spatiallyindependent texture case and by (14) and (16) for the spa-tially correlated texture case Those detection thresholds arethen used to obtain the theoretical and simulated detectionprobabilities The variations of theoretical and simulateddetection probabilitieswith different values of binary detectorparameter 119873 for two bounding cases are shown in Figure 1where 119873119868 and 119873119862 are denoted as the values of 119873 for thespatially independent texture case and the spatially correlatedtexture case respectively
From Figure 1 we first observe that the simulated detec-tion probability agrees well with the theoretical detectionprobability for both two cases This demonstrates that equa-tions (10)ndash(17) are correct Second we observe that for fixedvalues of V119888119904 in contrast with the spatially independent tex-ture case the detection probability of the spatially correlatedtexture case decreases However the deterioration degreedecreases with the increase of V119888119904 This can be explainedintuitively that the overall false alarm rate is dominated bya localized area of high clutter in the spatially correlatedtexture case but it is dominated by the occasional regionsof high clutter in the spatially independent texture caseConsequently in order to keep the same overall false alarmrate the fixed first threshold of the binary detector in thespatially correlated texture case is required to set a highervalue than that in the spatially independent texture caseNevertheless the bigger the values of V119888119904 are the closer arethe fixed first thresholds of two cases Thus the detectionprobabilities of the spatially correlated texture case are closeto those of the spatially independent texture case Similarresults were also obtained in [25]
As mentioned above the value of 119873 is chosen as theoptimal setting of the binary detector second threshold whenthe binary detector requires the least SCNR to establish agiven detection probability 119875119863 = 09 at a given false alarmprobability 119875119865 = 10minus4 Therefore we can see from Figure 1(a)that119873119868 = 4 is the optimal parameter setting for the spatiallyindependent texture case where V119888119904 = 1 However the valueof the optimal binary detector parameter is119873opt = 5 for thiscase by using the experiential formula in [22] The reason forthis is that our theoretical and simulated results are obtainedin the background of K-distributed sea clutter plus noisebut the experiential formula is derived in the background ofonly the K-distributed sea clutter Moreover in the practicalapplication the optimal parameter can be selected withina reasonable range In Figure 1(a) the performances of thebinary detectors of which the parameters are selected as119873119868 = 4 and 119873119868 = 5 respectively are very close when theirdetection probabilities satisfy 119875119889 gt 06 Thus it is acceptedthat 119873119868 = 5 is also the optimal parameter setting When
8 Mathematical Problems in Engineering
0 2 4 6 10 12 14 16800
01
02
03
04
05
06
07
08
09
10
Spatially correlated texture case
Spatially independenttexture case
Det
ectio
n pr
obab
ility
SCNR (dB)
Simulated NI = 3NC = 1Theoretical NI = 3NC = 1Simulated NI = 4NC = 2Th o et a I 4 N =
S u a e I 5 N =Th o et a I 5 N =S u a e I 6 N =Th o et a I 6 N =
(a)
Spatially independent texture case
Spatially correlated texture case
Simulated NI = 2NC = 1
Theoretical NI = 2NC = 1
Simulated NI = 3NC = 2
Theoretical NI = 3NC = 2
Simulated NI = 4NC = 3
Theoretical NI = 4NC = 3
Simulated NI = 5NC = 4
Theoretical NI = 5NC = 4
2 4 6 8 10 120SCNR (dB)
00
01
02
03
04
05
06
07
08
09
10
Det
ectio
n pr
obab
ility
(b)
Figure 1 Theoretical and simulated radar detection probabilities for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and CNR = 10 dB (black spatiallyindependent texture case gray spatially correlated texture case) (a) V119888119904 = 1 (b) V119888119904 = 25V119888119904 = 25 the optimal parameter setting is119873opt = 3 accordingto the experiential formula for the spatially independenttexture case We can see from Figure 1(b) that the detectionperformance of the detector is also optimal when 119873119868 =3 Similarly we can see from Figure 1 that 119873119862 = 2 and119873119862 = 3 are the optimal settings of the binary detector secondthreshold for both V119888119904 = 1 and V119888119904 = 25 in the spatiallycorrelated texture case It seems that these results are notconsistent with the known results in [27] This is because in[27] only the K-distributed sea clutter was considered
The above simulation demonstrates that the experien-tial formula given in [22] and the results given in [27]cannot be referred to in order to determinate the optimalparameter 119873opt of binary detector for the case that theradar returns include the 119870-distributed sea clutter and noisesimultaneously Although the spatial correlation of texturecomponents affects the value of optimal second thresholdsetting of the binary detector it should be noticed that forlarge clutter shape parameter the optimal parameter settingin the spatially correlated texture case is close to that in thespatially independent texture case Moreover the optimalparameter setting of 119873 in the spatially independent texturecase is also the suboptimal parameter setting in the spatiallycorrelated texture case for the small shape parameter suchas 119873119862 = 4 shown in Figure 1(a) Therefore in the followinginvestigation the optimal parameter setting is discussed onlyfor the spatially independent texture case
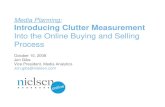
In Figure 2119873opt is plotted against CNR for different shapeparameters of sea clutter As we can see from these curves
= 1
= 4
= 12
= 16
= 8
789
101112131415161718
Nop
t
minus8 minus6 minus4 minus2 0 2 4 6 8minus10 12 14 16 18 2010CNR (dB)
Figure 2119873opt against CNR in different shape parameters for 1205902119899119904 =1 119875119891 = 10minus4 and 119875opt = 30119873opt is a monotonously nondecreasing function of CNR Foreach curve there are three CNR regions that is the lowCNR region (eg less than minus8 dB) the middle CNR region(eg from minus8 dB to 15 dB) and the high CNR region (eggreater than 15 dB) In the middle CNR region the value of119873opt increases with the increase of CNR for the same clutter
Mathematical Problems in Engineering 9
shape parameter This is because the proportion of the effectof clutter on detection performance increases as the CNRincreases In other two CNR regions the value of 119873opt isunrelated to the CNR In the low CNR region the effectof noise on detection performance is dominant and that ofclutter can be ignored So119873opt is a constant for all cases Onthe contrary in the high CNR region the effect of clutteron detection performance is dominant and that of noise canbe ignored Thus the optimal parameter of binary detectorcan be selected by using the experiential formula given in
[22] Based on above analysis the experiential formula canbe modified to guide the application of the binary detectorwhen target submerges in the K-distributed sea clutter plusnoise The modified experiential formula is given as follows
When CNR lt minus8 dB119873opt asymp round [027119875opt] (39)
When minus8 dB le CNR lt 15 dB
119873opt asymp round [(CNR + 8)23 065]minus025119875opt + (15 minus CNR)23 027119875opt] ] lt 10round [(CNR + 8)23 034119875opt + (15 minus CNR)23 027119875opt] ] ge 10 (40)
When CNR gt 15 dB119873opt asymp
round [065]minus025119875opt] ] lt 10round [034119875opt] ] ge 10 (41)
where round[sdot] denotes rounding operation It should bestated that under the constraint that the difference ofdetection performance is no more than 02 dB this modifiedexperiential formula can be applied for different119875opt and119873optcan be selected within some ranges so that this formula isnot unique In addition although this modified experientialformula is obtained under the condition that 119875119891 = 10minus4 and119875119863 = 09 it can be confirmed that the validity conditionsof this formula can be extended to 10minus4 ge 119875119865 ge 10minus10and 06 le 119875119863 le 095 according to the further numericalcalculation
42 Angle Measurement Performance In this section curvesof 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] and Υ[119903120576 | Δ 2] against relevantparameters are shown to analyze the angle measurementperformance with wideband monopulse radar Because theexact analytical formulas of 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] andΥ[119903120576 | Δ 2] cannot be derived all results in this sectionare obtained by numerical integration method It is assumedthat the angle measurements in the elevation and azimuthdirections can be regarded to be independent of each otherThus the patterns of the sum and difference channels ineither direction can be represented as two one-dimensionalpatterns A simulated monopulse antenna model is used toevaluate the performance of anglemeasurementThepatternsin the sum and difference channels can be represented as [13]
119892Σ (120579) = radic4120587120582 radic119882[ sin (ℎ (120579))ℎ (120579) ]119892Δ (120579) = radic4120587120582 radic3119882[ sin (ℎ (120579))ℎ (120579)2 minus cos (ℎ (120579))ℎ (120579) ] (42)
where ℎ(120579) = 120587(119882120582) sin(120579) 120582 is wavelength 119882 is thedimension of the antenna and 120579 is the deviation angle from
boresight We set 120582 = 8mm and 119882 = 322 cm Hence thebeamwidth is about 142 degrees It is worth pointing outthat in off-axis measurement the error of angle estimationin clutter increases as the deviation angle of off-axis targetincreases Nevertheless the results of the effect of clutter onthe angle estimation error can exhibit the similar behavior nomatter where the target locates in the main lobeThe analysisconclusion can be obtained from the results with a givendeviation angle Hence in our simulations the deviationangle of the off-axis target is set to 03 degrees
421 Effect of the Binary Detector Parameter 119873 The choiceof the binary detector parameter 119873 will affect not onlythe detection results but also the number of range cellsapplied to obtain the angle measurement Accordingly thedifferent values of the binary detector parameter119873will bringthe different angle measurement performances In Figure 3Υ[119903120576 | Δ 2] is plotted against SCNR of sum channel fordifferent values of 119873 Four different correlation cases areinvestigated It is assumed that in the simulation the cluttershape parameters of sum and difference channels are thesame
It can be observed from Figures 3(a) and 3(b) that in thespatially independent texture case the performance of anglemeasurement can be improved significantly by increasing thevalues of 119873 when SCNR is low yet its improvement slowsdown when SCNR is high Instead there are small differencesamong the performances of angle measurement for differentvalues of 119873 in the spatially correlated texture case Compar-ing Figures 3(c) and 3(d) to Figures 3(a) and 3(b) we see thatthe values of Υ[119903120576 | Δ 2] in the spatially correlated texturecase are higher than those in the spatially independent texturecase for the same SCNR and119873 This implies that an increasein spatial correlation of the texture components results in adegeneration of the angle measurement performance for thewideband monopulse radar On the other hand comparingFigures 3(b) and 3(d) to Figures 3(a) and 3(c) we do notsee the significant differences of Υ[119903120576 | Δ 2] for differentcorrelations of the clutter texture components between the
10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
angle measurement where the target fluctuation law wasunknown and multiple observations were available And theauthor successfully derived simple expression of conditionalmean and variance of the MR for the case that only a singleobservation was required and the threshold detection wasachieved
The above research results can effectively describe thestatistical properties of MR in many cases They are veryinstructive for radar designers Those researches mainlydiscussed the narrowband monopulse radar and assumedthat the target was an ideal point target Only the effectsof Gaussian noise on the MR were considered Howeverwhen the wideband monopulse radar is applied to track thecomplex targets on the sea the target returns are spreadwithin different range resolution cells Other different anglemeasurementmethods now need to extract the target angularinformationMeanwhile the presence of sea clutter will influ-ence the angle measurement performance In such cases theabove research results are no longer appropriate to describethe statistical properties of MR of wideband monopulseradar
Fortunately the clutter returns for high resolution radarscan bewellmodeled by the compoundGaussianmodel whichconsists of the product of two components called ldquotexturerdquoand ldquospecklerdquo In this compound Gaussian model the localmean level of the speckle component is determined by thetexture component When the local mean level is giventhe clutter can be regarded as the Gaussian distributionThe similar procedure presented by Seifer in literatures [1011] can now be applied to obtain the local distribution ofMR This local distribution of MR is then averaged over allpossible values of the local mean level to compute the overalldistribution of MR Encouraged by this we focus on theeffects of sea clutter on angle measurement performance ofwideband monopulse radar
In the wideband monopulse radar system the high reso-lution range profile (HRRP) of sum channel is firstly appliedto accomplish the extended target detection and the posi-tions of the range cells of the target are determined in theHRRP Then the corresponding HRRP returns in the sumand the difference channels are utilized to extract the angleof every one of the range cells of the target till the anglesof all range cells are obtained Lastly the geometrical centerangle of the target can be calculated by smoothing all anglesAccording to this procedure the method presented in [1011] is developed to deduce the mathematical expression ofconditional pdf ofMRerror for Rayleigh fluctuating extendedtarget in the background of compound K-distributed seaclutter plus noise Using this conditional pdf the MR con-ditional root mean square error (RMSE) the conditionalmean and standard deviation (STD) of theMR error are thenobtained to evaluate the angle measurement performanceSpecifically considering that the clutter may exhibit the cor-relation characteristics in the widebandmonopulse radar thespatial correlation of the texture components for each channelclutter and the correlation of the texture components betweenthe sum and difference channel clutters are considered indiscussion and two extreme situations are tackled for eachof them
The rest of the paper is organized as follows the basicsof statistical analysis including the radar returns model thecompound 119870-distribution model and the binary detectorare introduced in Section 2 In Section 3 we deduce theconditional pdf of MR error when the target is submerged inthe compound 119870-distributed sea clutter and noise Throughnumerical simulation method effects of binary detectorrsquosparameters and K-distributed clutter on the angle mea-surement performance are analyzed in Section 4 FinallySection 5 concludes the paper
2 Basics of Statistical Analysis
21 Wideband Monopulse Radar Returns The radar returnsin the sum and difference channels can be respectivelyexpressed as
119904119898 = 119904119898 + 119888119904119898 + 119899119904119898119889119898 = 119889119898 + 119888119889119898 + 119899119889119898119898 = 1 119867(1)
where119867 is the number of the range cells of the target 119904119898 and119889119898 are the target returns in the sum and difference channelsrespectively when the clutter and noise are absent 119888119904119898 and119888119889119898 are the clutter components in the sum and differencechannels respectively and 119899119904119898 and 119899119889119898 are the noise compo-nents in the sum and difference channels respectively In thispaper the noise components are the complexGaussian noiseswith zero mean and variance 1205902119899119904 for sum channel and 1205902119899119889 fordifference channel The target returns clutter and noise areassumed to be statistically independent
A variety of theoretical distribution functions (RayleighWeibull 119870 Pareto etc) were proposed to model the pdf ofthe amplitude of non-Gaussian sea clutter [14ndash16] Amongthese distributions the compound 119870-distribution is widelyused to model the clutter and many existing contributionsanalyzed the radar performance considering the compound119870-distributed clutter [17ndash20] For the sea clutter both in thesum and difference channels the compound 119870-distributioncan not only depict the amplitude distribution accurately butalso explain the scattering mechanism of sea clutter wellAccording to the compound119870-distribution the clutter can beinterpreted as the product of two independent componentssuch that
119888 = 119910119909 (2)
where 119909 is the speckle and 119910 is the texture which isnonnegative random process The mean level of the specklecomponent is modulated by the texture component The tex-ture and speckle are considered to be independent processesTherefore the pdf of compound119870 distributed sea clutter canbe expressed as
119901 (|119888|) = intinfin0119901 (|119888| | 119910) 119901 (119910) 119889119910 (3)
Mathematical Problems in Engineering 3
where |119888| is the amplitude of the sea clutter 119901(|119888| | 119910) is thepdf of the speckle component and can be given by
119901 (|119888| | 119910) = 2 |119888|11991021205902119888 exp(minus |119888|211991021205902119888 ) (4)
where 1205902119888 = 119875119888 and 119875119888 is the average power of sea clutter Thepdf of 119910 can be written as
119901 (119910) = 2VVΓ (V)1199102Vminus1 exp (minusV1199102) (5)
where Γ(sdot) is Gamma function and V is the clutter shapeparameter which embodies the clutter fluctuation degreeThus the clutter in the sum and difference channels areexpressed as 119888119904119898 = 119910119904119898119909119904119898 and 119888119889119898 = 119910119889119898119909119889119898 respectivelyAnd the clutter average powers are denoted as 1205902119888119904 and 1205902119888119889 andthe shape parameters are denoted as V119888119904 and V119888119889
It is assumed that the target returns in all resolution cellsare randomly fluctuating and follow the same distributionTheir amplitude pdfs are Rayleigh distributions and theirphase pdfs are uniform distributions So 119904119898 is a complexGaussian random variable with zero mean Its average poweris 1198602119898 We assume that forall119898 119899 isin [1119867] 1198602119898 = 1198602119899 = 1198602 Thusthe target SCNR in the sum channel can be written as
120594SCNR = 119864 100381610038161003816100381611990411989810038161003816100381610038162119864 1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 = 11986021205902119888119904 + 1205902119899119904 (6)
where 119864sdot denotes expectation operator Additionally thetarget conditional SCNR in the sum channel can be rewrittenas
1205942 = 119864 100381610038161003816100381611990411989810038161003816100381610038162 | 119910119904119898119864 1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 | 119910119904119898 = 119860211991021199041198981205902119888119904 + 1205902119899119904= 1205902119888119904 + 120590211989911990411991021199041198981205902119888119904 + 1205902119899119904120594SCNR
(7)
where 119910119904119898 is the clutter texture in the sum channel
22 Binary Detector In the wideband radar system thebinary detector is employed for the effective detection of anextended target in sea clutter because it can significantlydecrease the false alarm probability induced by the sea spikes[21ndash24] The binary detector is comprised of two stages Thefirst stage is essentially a simplified version of the likelihoodratio test (LRT)where a detection threshold119879 is set accordingto the quiescent clutter and noise levels For the 119898th rangecell the detector output is set to either 1 or 0 according to10038161003816100381610038161199041198981003816100381610038161003816 ⋛ 119879 997891997888rarr ℎ(1)119898 (8)
During this stage all range cell returns are quantified as 1 or0 The second stage detection operates upon these binary-detected range returns and a range sliding window 119873-of-119875 detector is used Suppose that 119870 range cell returns are
sampled We denote that 119895 isin 0 1 119870 minus 119875 + 1 and119872 =sum119895+119875minus1119898=119895 ℎ(1)119898 Then this stage is accomplished as
119872 ⋛ 119873 997891997888rarr ℎ(2)119898 (9)
If119872 ge 119873 this indicates the presence of a target in this rangesliding window and thus ℎ(2)119898 = 1 otherwise this indicatesthat the target is not present and thus ℎ(2)119898 = 0 Generally thelength of range sliding window is not shorter than the size oftarget
For the high resolution radar the sizes of range cellsare smaller than the scales of large features on the seasurface Therefore the correlation between the sea clutterfrom adjacent range cells that is the spatial correlation isgenerally more pronounced Modeling of the spatial corre-lation characteristics is very important for accurate perfor-mance prediction of binary detector For the compound 119870-distribution the spatial correlation can be characterized bythe correlation properties of the texture and speckle Due tothe absence of oversampling the speckle can be considereddecorrelated from one range cell to the next Here onlytwo bounding cases of spatial correlation for the texture arediscussed
As given in Table 1 by Watts [25] the spatial correlationlength of clutter in the different sea states is several to dozensof meters When the length of range sliding window is muchlarger than the spatial correlation length of clutter it can beassumed that the texture samples are independent within therange sliding window This case is denoted as the spatiallyindependent texture case On the contrary when the lengthof range sliding window is smaller than the spatial correlationlength of clutter it can be assumed that the texture samplesare completely correlated in the range sliding window Thiscase is denoted as the spatially correlated texture case
For the spatially independent texture case the false alarmprobability of the first stage detection denoted as 1198751198911 can beexpressed as
1198751198911 = intinfin119879intinfin0119901 (10038161003816100381610038161198881199041198981003816100381610038161003816 | 119910s119898) 119901 (119910119904119898) 119889119910119904119898119889 10038161003816100381610038161198881199041198981003816100381610038161003816
= intinfin0
exp(minus |119879|211991021199041198981205902119888119904 + 1205902119899119904)119901 (119910119904119898) 119889119910119904119898(10)
where 119901(119910119904119898) is the pdf of 119910119904119898 given by (5) Thus theoverall false alarm probability for the binary detector can becomputed by summing over the false alarm occurrences ofthe binomial pdf as
1198751198651 = 119875sum119898=119873
1198621198751198981198751198981198911 (1 minus 1198751198911)119875minus119898 (11)
where 119862119875119898 is the number of combinations of 119875 items taken119898at a timeThe detection probability of the first stage detectioncan be obtained as1198751198891 = 119901119889 10038161003816100381610038161199041198981003816100381610038161003816 ge 119879= intinfin0
exp(minus |119879|2(1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904))119901 (119910119904119898) 119889119910119904119898(12)
4 Mathematical Problems in Engineering
Similar to the computation of the overall false alarm proba-bility the overall detection probability for the binary detectorcan be expressed as
1198751198631 = 119901119889 119872 ge 119873 = 119875sum119898=119873
1198621198751198981198751198981198891 (1 minus 1198751198891)119875minus119898 (13)
However for the spatially correlated texture case 119910119904119898is constant within the range sliding window but variesevidently with range sliding window locations Hence thecalculating methods of the overall false alarm probabilityand the overall detection probability in this case are differentfrom those in the independent texture case For the first stagedetection given the local mean level value 119910119904119898 the local falsealarm probability 1198751198912 and detection probability 1198751198892 can becomputed as
1198751198912 = intinfin119879119901 (10038161003816100381610038161198881199041198981003816100381610038161003816 | 119910119904119898) 119889 10038161003816100381610038161198881199041198981003816100381610038161003816
= exp(minus |119879|211991021199041198981205902119888119904 + 1205902119899119904) (14)
1198751198892 = 119901119889 10038161003816100381610038161199041198981003816100381610038161003816 ge 119879 | 119910119904119898= exp(minus |119879|2(1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904))
(15)
Then the overall probability of false alarm and detection forthe binary detector can be computed by summing over thelocal probabilities of false alarm and detection of the binomialpdf and then by averaging over all possible values of the localmean level They are given by
1198751198652 = intinfin0
119875sum119898=119873
1198621198751198981198751198981198912 (1 minus 1198751198912)119875minus119898 119901 (119910119904119898) 119889119910119904119898 (16)
1198751198632 = 119901119889 119872 ge 119873= intinfin0
119875sum119898=119873
1198621198751198981198751198981198892 (1 minus 1198751198892)119875minus119898 119901 (119910119904119898) 119889119910119904119898 (17)
Once the overall false alarm probability and the parametersof binary detector are given the detection threshold of theLRT in the first stage detection can be determined by (10)and (11) for the spatially independent texture case and by (14)and (16) for the spatially correlated texture case Then theaggregated detection probabilities in both these two cases canbe computed
3 Angle Measurement Performance ofWideband Monopulse Radar
31 Angle Measurement Error of Wideband Monopulse RadarWithout loss of generality we do not consider the imple-mentation type of the monopulse radar In a practical envi-ronment the received radar signal usually contains clutternoise and interferenceTheMR is a complex number In realapplications the real part of the complexMR(CMR) is widely
used to extract the angle of arrival (DOA) of a target whichis defined as [1 10]
119903 = Re119889119904 (18)
where 119904 and 119889 respectively are the complex-valued samplesof receiving signals simultaneously obtained from the sumand difference channels Resdot denotes the real part of acomplex value 119903 is the monotone function of DOA 120579 of theobserved target Usually the relationship between 119903 and 120579 canbe approximated by a linear function namely
120579 asymp 120579BW119896119898 119903 (19)
where 120579BW is the 3 dB beamwidth of the sum pattern and 119896119898denotes monopulse slope
We assume that 119872 range cell returns are determined tohave the probable presence of a target and the presence of atarget is determined by the detection process According to(18) and (19) we can obtain the angle value 120579119898 for each rangecell of target The geometrical center angle of target is thenacquired by weighting processing on all angle values that is
120579 = 119872sum119898=1
120572119898120579119898 (20)
where 120572119898 is weighting operatorThe commonly used weight-ing operators include uniform weighting linear weightingand power weighting To simplify the analysis the uniformweighting method is adopted that is 120572119898 = 1119872
When clutter and noise are absent the MR in the 119898thrange cell is denoted as 120578119898 = 119889119898119904119898 It is a real number Themonopulse slope 119896119898 is assumed to be constant for all rangecell returns from the same targetThus according to (20) theMR associated with the real geometrical center angle of targetcan be written as
120578 = 1119872 119872sum119898=1120578119898 = 1119872 119872sum119898=1119889119898119904119898 (21)
The flare angle of target and the corresponding MR aredenoted as Δ120579 and Δ120578 respectively Δ120579 is related to the targetsize and the radar working range When radar works in thefar field we can use the approximations Δ120579 asymp 0 and 120578119898 asymp 120578Here the angle measurement error induced by the flare angleof target is ignored When the target return is submerged inthe sea clutter and noise the CMR of target return of singlerange cell is denoted as
120578119898 = 119889119898119904119898 = 119889119898 + 119888119889119898 + 119899119889119898119904119898 + 119888119904119898 + 119899119904119898 (22)
Then the CMR error of target can be expressed as
120576 = 1119872 119872sum119898=1120578119898 minus 1119872 119872sum119898=1120578119898 = 1119872 119872sum119898=1(119889119898119904119898 minus 119889119898119904119898 )= 1119872 119872sum119898=1120576119898
(23)
Mathematical Problems in Engineering 5
where 120576119898 is the CMR error of single range cell By using 120578119898 asymp120578 120576119898 can be expressed as
120576119898 = 119889119898119904119898 minus 119889119898119904119898 asymp (119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)119904119898 + 119888119904119898 + 119899119904119898 (24)
The denominator in (24) is denoted as 119878119898 = 119904119898+119888119904119898+119899119904119898 andthe numerator is denoted as119863119898 = (119888119889119898 +119899119889119898) minus 120578(119888119904119898 +119899119904119898)Here119863119898 represents the error sources of angle measurementincluding the clutter and noise in both the sum and differencechannels Moreover the contribution of (119888119889119898 + 119899119889119898) to theerror is given by (119888119889119898 + 119899119889119898)(119904119898 + 119888119904119898 + 119899119889119898) and thecontribution of (119888119904119898 + 119899119904119898) to the error is given by 120578(119888s119898 +119899119904119898)(119904119898 + 119888119904119898 + 119899119889119898) The effect of the clutter plus noise ofsum channel is related to the location of target in the beamThen we can get 119864[119878119898] = 0 and 119864[119863119898] = 0 The conditionalvariances of 119878119898 and119863119898 can be represented as
119886 = radic12 (119864 [1003816100381610038161003816119863119898 minus 119864 [119863119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12 [11991021198891198981205902119888119889 + 1205902119899119889 + 1205782 (11991021199041198981205902119888119904 + 1205902119899119904) minus 21205881120578119910119904119898120590119888119904119910119889119898120590119888119889]
119887 = radic12 (119864 [1003816100381610038161003816119878119898 minus 119864 [119878119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12119864 1003816100381610038161003816119904119898 + 119888119904119898 + 11989911990411989810038161003816100381610038162 = radic12 (1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904)
(25)
where 1205881 is the real part of conditional correlation of clutterbetween the sum and the difference channels This condi-tional correlation can be represented as
1205851 = 1205881 + 1198951205891 = 119864 119888lowast119904119898119888119889119898 | 119910119904119898 119910119889119898radic119864 119888lowast119904119898119888119904119898 | 119910119904119898radic119864 119888lowast119889119898119888119889119898 | 119910119889119898= 119864 119910119904119898119910119889119898119909lowast119904119898119909119889119898 | 119910119904119898 119910119889119898119910119904119898119910119889119898120590119888119904120590119888119889 = 119864 119909lowast119904119898119909119889119898120590119888119904120590119888119889= 120585119909
(26)
where 1205891 is imaginary part of 1205851 1205881 and 1205891 are bounded by12058821 + 12058921 le 1 120585119909 is the correlation between the specklesof the sum and the difference channels The superscript lowastdenotes the conjugate operation From (26) we observe thatthe conditional correlation 1205851 is equivalent to the specklecorrelation 120585119909 Then the conditional correlation between 119878119898and119863119898 is given by
120585120576 = 119864 (119904119898 + 119888119904119898 + 119899119904119898)lowast [(119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)] | 119910119904119898 1199101198891198982119886119887 = 1199101199041198981205901198881199042119886119887 (1205881119910119889119898120590119888119889 minus 120578119910119904119898120590119888119904)+ 1198951199101199041198981199101198891198981205901198881199041205901198881198892119886119887 1205891 = 120588120576 + 119895120589120576 (27)
where 120588120576 and 120589120576 are the real and imaginary parts of 120585120576respectively and are bounded by 1205882120576 + 1205892120576 le 1 It should benoted that 120588120576 and 120589120576 have 119910119904119898 and 119910119889119898 dependencies but theyare constant in the Gaussian noise case
32 Exact Solution for Conditional pdf of MR Error Let usdefine
119871119898 = 10038161003816100381610038161199041198981003816100381610038161003816radic119864 [1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 | 119910119904119898] (28)
Denote119876120576119898 = 119863119898119878119898 The CMR error 119902120576 can be representedby the terms of its real and imaginary parts namely 119902120576119898 =119903120576119898 + 119895119905120576119898 Thus the joint pdf of 119876120576119898 and 119871119898 can berepresented as follows [10]
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898) = 211989731198981205871205832 (1 + 1205942)2times exp(minus[ 1198972119898(1 + 1205942) + 1198972119898(1 + 1205942) 1205832 (119903120576119898 minus 119886119887120588120576)2+ 1198972119898(1 + 1205942) 1205832 (119905120576119898 minus 119886119887 120589120576)2])
(29)
where 1205942 120588120576 120589120576 119886 and 119887 are defined previously and
120583 = 119886119887radic1 minus 1205882120576 minus 1205892120576 (30)
It should be noted that the variation of the underlying powerdue to the 119870-distribution assumption now causes the pdf in(29) to have 119910119904119898 and 119910119889119898 dependencies
At the first stage of detection process Δ 1 = |119904119898| ge 119879denotes the event that the radar return of single range cellin the sum channel exceeds the detection threshold 1198970 =119879radic119864[|119888119904119898 + 119899119904119898|2 | 119910119904119898] denotes the detection threshold ofthe LRT normalized with respect to the conditional root-mean-squared sum channel clutter plus noise power Itshould be noted that the normalized values of 119871119898 and 1198970 alsohave a 119910119904119898 dependence under the119870-distribution assumptionThe resulting distribution conditioned on the occurrence ofevent Δ 1 is then obtained by integrating with respect tovariables 119905120576119898 and 119897119898 as follows
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898 Δ 1)= 1205832119875119889radic120587119861minus32
6 Mathematical Problems in Engineering
times radic1205872 [[[1 minus erf( 1198611198970120583radic(1 + 1205942))]]]
+ 1198611198970120583radic(1 + 1205942) exp[minus119861211989720(1 + 1205942) 1205832]
= 119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)119875119889
(31)
where 119861 = 1205832 + (119903120576119898 minus (119886119887)120588120576)2 erf(119911) = (2radic120587) int1199110 119890minus1199052119889119905 iserror function and 119875119889 = 119875|119904119898| ge 119879 | 119910119904119898 is the detectionprobability with the given 119910119904119898 during the first stage detection
Analogous to the effect on the detection performance thespatial correlation of clutter also affects angle measurementperformance of radar We assume that the spatial correlationof the difference channel clutter is the same as the one of thesum channel clutter In the spatially independent texture casethe value of 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1) is averaged over all
possible values of 119910119904119898 and 119910119889119898 to compute the conditionalpdf of MR error of single range cell return of target (denotedby 119901119877120576119898(119903120576119898 | Δ 1)) that is
119901119877120576119898 (119903120576119898 | Δ 1) = 11198751198891sdot intinfin0intinfin0119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)
sdot 119901 (119910119904119898 119910119889119898) 119889119910119904119898119889119910119889119898(32)
where 1198751198891 is the detection probability of the first stagedetector in the spatially independent texture case and is givenby (12) 119901(119910119904119898 119910119889119898) is the joint pdf of 119910119904119898 and 119910119889119898
It is assumed that119872 range cell returns have been detectedto determine the probable presence of a target in the localrange region [119895 119895 + 119875 minus 1) at the first stage of detectionprocessing Let 119901(119903120576 | 119872) denote the conditional pdf ofMR error when119872 range cell returns are used to extract theDOA of target It can be assumed that for each range cell119901119877120576119898|Δ 1(119903120576119898) is independent and obeys the distribution in(32) Denoting 119903120576_sum = sum119872119898=1 119903120576119898 and 119903120576 = 119903120576_sum119872 theconditional pdf of 119903120576_sum can be computed as [26]
119901sum (119903120576_sum | 119872) = 1199011198771205761 (1199031205761 | Δ 1) otimes 1199011198771205762 (1199031205762 | Δ 1) otimes sdot sdot sdot otimes 119901119877120576119872 (119903120576119872 | Δ 1) (33)
where otimes is convolution operation Thus we can obtain 119901(119903120576 |119872) = 119872119901sum(119872119903120576 | 119872) Additionally the probability of119872times occurrences of the event Δ 1 at the first stage detectionprocessing can be written as 119901119889119872 = 1198621198751198721198751198721198891 (1 minus 1198751198891)119875minus119872Then we can obtain that
119901 (119903120576119872) = 119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus119872 (34)
At the second stage of detection processing Δ 2 = 119872 ge119873 is denoted as the event of the target presence For theindependent texture case the pdf ofMR error under the eventΔ 2 can then be expressed as
119901119877120576|Δ 2 (119903120576) = 119901 (119903120576119872 ge 119873)119901119889 (119872 ge 119873)= sum119875119872=119873119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus1198721198751198631 (35)
where 1198751198631 is the overall detection probability in the spatiallyindependent texture case and is given by (13)
In the spatially correlated texture case the derivationprocess of the conditional pdf of MR error is similar tothat in the spatially independent texture case The analogousformulas with (33) (34) and (35) can be obtained by thesimple substitutions of 1198751198892 and 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1)for 1198751198891 and 119901119877120576119898(119903120576119898 | Δ 1) and they are denoted by 119901(119903120576 |119872 119910119904119898 119910119889119898) 119901(119903120576119872 | 119910119904119898 119910119889119898) and 119901(119903120576 | 119910119904119898 119910119889119898)They have 119910119904119898 and 119910119889119898 dependencies Therefore the overallconditional pdf of MR error for the spatially correlated
texture case is computed by averaging the MR errors over allpossible values of 119910119904119898 and 119910119889119898 that is
119901119877120576|Δ 2 (119903120576) = intinfin0intinfin0119901119877120576|Δ 2 (119903120576 | 119910119888119904 119910119888119889)
sdot 119901 (119910119888119904 119910119888119889 | Δ 2) 119889119910119888119904119889119910119888119889 = 11198751198632sdot intinfin0intinfin0
119875sum119872=119873
119862119875119872119901 (119903120576 | 119872 119910119888119904 119910119888119889)sdot 1198751198721198892 (1 minus 1198751198892)119875minus119872 119901 (119910119888119904 119910119888119889) 119889119910119888119904119889119910119888119889
(36)
where 1198751198892 and 1198751198632 are the first and second stage detectionprobabilities in the spatially correlated texture case and aregiven by (15) and (17) respectively
In the above analysis the joint pdf119901(119910119904119898 119910119889119898) is involvedThis pdf describes the distribution of the clutter texturesof the sum and difference channels within the same rangecell Generally the clutter returns in the sum and differencechannels are from the scattering of the common illuminatingsea surface region Hence the correlation of the texturecomponents of the sea clutter between the sum and differencechannels within the same range cell is also pronouncedMoreover because the directions of the sum and differencepatternmain lobes are not consistent and the clutter intensityis dominated by the antenna pattern gain the texture cor-relations are different for different range cells Herein twobounding situations (ie 119910119904119898 and 119910119889119898 are independent and
Mathematical Problems in Engineering 7
are completely correlated) are considered separately When119910119904119898 and 119910119889119898 are independent 119901(119910119904119898 119910119889119898) can be separatedand can be rewritten as 119901(119910119904119898 119910119889119898) = 119901(119910119904119898)119901(119910119889119898) When119910119904119898 and 119910119889119898 are completely correlated the values of 119910119904119898 and119910119889119898 within the same range cell are the same All involvingpdfs of monopulse angle measurement errors have only a 119910119904119898dependence Therefore the double integrals in (32) and (36)are reduced to the single integral
We wish to determine the error in an estimate of targetangle due to the clutter and noise Using (35) and (36) theconditional moments of 119903120576 are then given by
119864 [119903119899120576 | Δ 2] = intinfinminusinfin
119903119899120576119901119877120576|Δ 2 (119903120576) 119889119903120576 119899 = 1 2 (37)
For 119899 is equal to unity and two the first and second momentsof 119903120576 can be obtained by integrating (37) which are denotedas 119864[119903120576 | Δ 2] and 119864[1199032120576 | Δ 2] respectively Also the firstmoment is named the mean error (bias) Although each ofthe clutter and noise variables has a distribution with zeromean value the mean error is not zero and it cannot exceedthe width of the main lobe The square root of the secondmoment is named the RMSE and is denoted by Υ[119903120576 | Δ 2]In practice the RMSE is desired to measure the error and itis widely used to assess the performance for various kinds ofmeasurement results It is the combined effect of the meanerror and the STD from thismean errorThe conditional STDof 119903120576 is denoted as 120590[119903120576 | Δ 2] and it can be obtained from
1205902 [119903120576 | Δ 2] = 119864 [1199032120576 | Δ 2] minus (119864 [119903120576 | Δ 2])2 (38)
It is interesting to note that in theory this conditional STDof 119903120576 is infinite when the condition of Δ 2 is removed [1 10]In actual practice however the conversion from monopulseratio to angle is implemented as being within the main lobeand the target is also presumed to be within the main lobeThe conditional STD of 119903120576 is finite and its maximum possiblevalue is of the order of the beamwidth Consequently Υ[119903120576 |Δ 2] is also finite and its maximum possible value is of theorder of the beamwidth In our discussion Υ[119903120576 | Δ 2] isapplied to assess the performance of the angle measurementof wideband monopulse radar in clutter plus noise and 119864[119903120576 |Δ 2] and 120590[119903120576 | Δ 2] are applied to determine the maincontributions of the clutter and noise to angle error
4 Simulation Results and Analysis
41 Optimal Binary Detection Good detection performanceand angle measurement accuracy are two main goals ofwideband monopulse radar design Generally only whenthe target appears in the detected result the processingof monopulse angle measurement is carried out Hereinthe detection performance of the binary detector is firstlyanalyzed in the background of 119870-distributed sea clutter plusGaussian noise As in the researches [22 27] the optimalparameter settings are defined as the values of the binarydetector parameters which make the detector establish agiven detection probability at a given false alarm probabilitywith the least SCNR It is assumed that the parameter 119875 of
binary detector in our simulations is optimal According tothe results given in [22] it can be set to be equal to the targetradial length This optimal value of 119875 is denoted as 119875opt
The 119870-distributed sea clutters are generated by usingthe spherically invariant random process (SIRP) methodThe 20000 Monte Carlo experiments are conducted Inthe simulation the overall false alarm probability is set to10minus4 and the required detection thresholds of the LRT arecomputed theoretically by (10) and (11) for the spatiallyindependent texture case and by (14) and (16) for the spa-tially correlated texture case Those detection thresholds arethen used to obtain the theoretical and simulated detectionprobabilities The variations of theoretical and simulateddetection probabilitieswith different values of binary detectorparameter 119873 for two bounding cases are shown in Figure 1where 119873119868 and 119873119862 are denoted as the values of 119873 for thespatially independent texture case and the spatially correlatedtexture case respectively
From Figure 1 we first observe that the simulated detec-tion probability agrees well with the theoretical detectionprobability for both two cases This demonstrates that equa-tions (10)ndash(17) are correct Second we observe that for fixedvalues of V119888119904 in contrast with the spatially independent tex-ture case the detection probability of the spatially correlatedtexture case decreases However the deterioration degreedecreases with the increase of V119888119904 This can be explainedintuitively that the overall false alarm rate is dominated bya localized area of high clutter in the spatially correlatedtexture case but it is dominated by the occasional regionsof high clutter in the spatially independent texture caseConsequently in order to keep the same overall false alarmrate the fixed first threshold of the binary detector in thespatially correlated texture case is required to set a highervalue than that in the spatially independent texture caseNevertheless the bigger the values of V119888119904 are the closer arethe fixed first thresholds of two cases Thus the detectionprobabilities of the spatially correlated texture case are closeto those of the spatially independent texture case Similarresults were also obtained in [25]
As mentioned above the value of 119873 is chosen as theoptimal setting of the binary detector second threshold whenthe binary detector requires the least SCNR to establish agiven detection probability 119875119863 = 09 at a given false alarmprobability 119875119865 = 10minus4 Therefore we can see from Figure 1(a)that119873119868 = 4 is the optimal parameter setting for the spatiallyindependent texture case where V119888119904 = 1 However the valueof the optimal binary detector parameter is119873opt = 5 for thiscase by using the experiential formula in [22] The reason forthis is that our theoretical and simulated results are obtainedin the background of K-distributed sea clutter plus noisebut the experiential formula is derived in the background ofonly the K-distributed sea clutter Moreover in the practicalapplication the optimal parameter can be selected withina reasonable range In Figure 1(a) the performances of thebinary detectors of which the parameters are selected as119873119868 = 4 and 119873119868 = 5 respectively are very close when theirdetection probabilities satisfy 119875119889 gt 06 Thus it is acceptedthat 119873119868 = 5 is also the optimal parameter setting When
8 Mathematical Problems in Engineering
0 2 4 6 10 12 14 16800
01
02
03
04
05
06
07
08
09
10
Spatially correlated texture case
Spatially independenttexture case
Det
ectio
n pr
obab
ility
SCNR (dB)
Simulated NI = 3NC = 1Theoretical NI = 3NC = 1Simulated NI = 4NC = 2Th o et a I 4 N =
S u a e I 5 N =Th o et a I 5 N =S u a e I 6 N =Th o et a I 6 N =
(a)
Spatially independent texture case
Spatially correlated texture case
Simulated NI = 2NC = 1
Theoretical NI = 2NC = 1
Simulated NI = 3NC = 2
Theoretical NI = 3NC = 2
Simulated NI = 4NC = 3
Theoretical NI = 4NC = 3
Simulated NI = 5NC = 4
Theoretical NI = 5NC = 4
2 4 6 8 10 120SCNR (dB)
00
01
02
03
04
05
06
07
08
09
10
Det
ectio
n pr
obab
ility
(b)
Figure 1 Theoretical and simulated radar detection probabilities for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and CNR = 10 dB (black spatiallyindependent texture case gray spatially correlated texture case) (a) V119888119904 = 1 (b) V119888119904 = 25V119888119904 = 25 the optimal parameter setting is119873opt = 3 accordingto the experiential formula for the spatially independenttexture case We can see from Figure 1(b) that the detectionperformance of the detector is also optimal when 119873119868 =3 Similarly we can see from Figure 1 that 119873119862 = 2 and119873119862 = 3 are the optimal settings of the binary detector secondthreshold for both V119888119904 = 1 and V119888119904 = 25 in the spatiallycorrelated texture case It seems that these results are notconsistent with the known results in [27] This is because in[27] only the K-distributed sea clutter was considered
The above simulation demonstrates that the experien-tial formula given in [22] and the results given in [27]cannot be referred to in order to determinate the optimalparameter 119873opt of binary detector for the case that theradar returns include the 119870-distributed sea clutter and noisesimultaneously Although the spatial correlation of texturecomponents affects the value of optimal second thresholdsetting of the binary detector it should be noticed that forlarge clutter shape parameter the optimal parameter settingin the spatially correlated texture case is close to that in thespatially independent texture case Moreover the optimalparameter setting of 119873 in the spatially independent texturecase is also the suboptimal parameter setting in the spatiallycorrelated texture case for the small shape parameter suchas 119873119862 = 4 shown in Figure 1(a) Therefore in the followinginvestigation the optimal parameter setting is discussed onlyfor the spatially independent texture case
In Figure 2119873opt is plotted against CNR for different shapeparameters of sea clutter As we can see from these curves
= 1
= 4
= 12
= 16
= 8
789
101112131415161718
Nop
t
minus8 minus6 minus4 minus2 0 2 4 6 8minus10 12 14 16 18 2010CNR (dB)
Figure 2119873opt against CNR in different shape parameters for 1205902119899119904 =1 119875119891 = 10minus4 and 119875opt = 30119873opt is a monotonously nondecreasing function of CNR Foreach curve there are three CNR regions that is the lowCNR region (eg less than minus8 dB) the middle CNR region(eg from minus8 dB to 15 dB) and the high CNR region (eggreater than 15 dB) In the middle CNR region the value of119873opt increases with the increase of CNR for the same clutter
Mathematical Problems in Engineering 9
shape parameter This is because the proportion of the effectof clutter on detection performance increases as the CNRincreases In other two CNR regions the value of 119873opt isunrelated to the CNR In the low CNR region the effectof noise on detection performance is dominant and that ofclutter can be ignored So119873opt is a constant for all cases Onthe contrary in the high CNR region the effect of clutteron detection performance is dominant and that of noise canbe ignored Thus the optimal parameter of binary detectorcan be selected by using the experiential formula given in
[22] Based on above analysis the experiential formula canbe modified to guide the application of the binary detectorwhen target submerges in the K-distributed sea clutter plusnoise The modified experiential formula is given as follows
When CNR lt minus8 dB119873opt asymp round [027119875opt] (39)
When minus8 dB le CNR lt 15 dB
119873opt asymp round [(CNR + 8)23 065]minus025119875opt + (15 minus CNR)23 027119875opt] ] lt 10round [(CNR + 8)23 034119875opt + (15 minus CNR)23 027119875opt] ] ge 10 (40)
When CNR gt 15 dB119873opt asymp
round [065]minus025119875opt] ] lt 10round [034119875opt] ] ge 10 (41)
where round[sdot] denotes rounding operation It should bestated that under the constraint that the difference ofdetection performance is no more than 02 dB this modifiedexperiential formula can be applied for different119875opt and119873optcan be selected within some ranges so that this formula isnot unique In addition although this modified experientialformula is obtained under the condition that 119875119891 = 10minus4 and119875119863 = 09 it can be confirmed that the validity conditionsof this formula can be extended to 10minus4 ge 119875119865 ge 10minus10and 06 le 119875119863 le 095 according to the further numericalcalculation
42 Angle Measurement Performance In this section curvesof 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] and Υ[119903120576 | Δ 2] against relevantparameters are shown to analyze the angle measurementperformance with wideband monopulse radar Because theexact analytical formulas of 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] andΥ[119903120576 | Δ 2] cannot be derived all results in this sectionare obtained by numerical integration method It is assumedthat the angle measurements in the elevation and azimuthdirections can be regarded to be independent of each otherThus the patterns of the sum and difference channels ineither direction can be represented as two one-dimensionalpatterns A simulated monopulse antenna model is used toevaluate the performance of anglemeasurementThepatternsin the sum and difference channels can be represented as [13]
119892Σ (120579) = radic4120587120582 radic119882[ sin (ℎ (120579))ℎ (120579) ]119892Δ (120579) = radic4120587120582 radic3119882[ sin (ℎ (120579))ℎ (120579)2 minus cos (ℎ (120579))ℎ (120579) ] (42)
where ℎ(120579) = 120587(119882120582) sin(120579) 120582 is wavelength 119882 is thedimension of the antenna and 120579 is the deviation angle from
boresight We set 120582 = 8mm and 119882 = 322 cm Hence thebeamwidth is about 142 degrees It is worth pointing outthat in off-axis measurement the error of angle estimationin clutter increases as the deviation angle of off-axis targetincreases Nevertheless the results of the effect of clutter onthe angle estimation error can exhibit the similar behavior nomatter where the target locates in the main lobeThe analysisconclusion can be obtained from the results with a givendeviation angle Hence in our simulations the deviationangle of the off-axis target is set to 03 degrees
421 Effect of the Binary Detector Parameter 119873 The choiceof the binary detector parameter 119873 will affect not onlythe detection results but also the number of range cellsapplied to obtain the angle measurement Accordingly thedifferent values of the binary detector parameter119873will bringthe different angle measurement performances In Figure 3Υ[119903120576 | Δ 2] is plotted against SCNR of sum channel fordifferent values of 119873 Four different correlation cases areinvestigated It is assumed that in the simulation the cluttershape parameters of sum and difference channels are thesame
It can be observed from Figures 3(a) and 3(b) that in thespatially independent texture case the performance of anglemeasurement can be improved significantly by increasing thevalues of 119873 when SCNR is low yet its improvement slowsdown when SCNR is high Instead there are small differencesamong the performances of angle measurement for differentvalues of 119873 in the spatially correlated texture case Compar-ing Figures 3(c) and 3(d) to Figures 3(a) and 3(b) we see thatthe values of Υ[119903120576 | Δ 2] in the spatially correlated texturecase are higher than those in the spatially independent texturecase for the same SCNR and119873 This implies that an increasein spatial correlation of the texture components results in adegeneration of the angle measurement performance for thewideband monopulse radar On the other hand comparingFigures 3(b) and 3(d) to Figures 3(a) and 3(c) we do notsee the significant differences of Υ[119903120576 | Δ 2] for differentcorrelations of the clutter texture components between the
10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
where |119888| is the amplitude of the sea clutter 119901(|119888| | 119910) is thepdf of the speckle component and can be given by
119901 (|119888| | 119910) = 2 |119888|11991021205902119888 exp(minus |119888|211991021205902119888 ) (4)
where 1205902119888 = 119875119888 and 119875119888 is the average power of sea clutter Thepdf of 119910 can be written as
119901 (119910) = 2VVΓ (V)1199102Vminus1 exp (minusV1199102) (5)
where Γ(sdot) is Gamma function and V is the clutter shapeparameter which embodies the clutter fluctuation degreeThus the clutter in the sum and difference channels areexpressed as 119888119904119898 = 119910119904119898119909119904119898 and 119888119889119898 = 119910119889119898119909119889119898 respectivelyAnd the clutter average powers are denoted as 1205902119888119904 and 1205902119888119889 andthe shape parameters are denoted as V119888119904 and V119888119889
It is assumed that the target returns in all resolution cellsare randomly fluctuating and follow the same distributionTheir amplitude pdfs are Rayleigh distributions and theirphase pdfs are uniform distributions So 119904119898 is a complexGaussian random variable with zero mean Its average poweris 1198602119898 We assume that forall119898 119899 isin [1119867] 1198602119898 = 1198602119899 = 1198602 Thusthe target SCNR in the sum channel can be written as
120594SCNR = 119864 100381610038161003816100381611990411989810038161003816100381610038162119864 1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 = 11986021205902119888119904 + 1205902119899119904 (6)
where 119864sdot denotes expectation operator Additionally thetarget conditional SCNR in the sum channel can be rewrittenas
1205942 = 119864 100381610038161003816100381611990411989810038161003816100381610038162 | 119910119904119898119864 1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 | 119910119904119898 = 119860211991021199041198981205902119888119904 + 1205902119899119904= 1205902119888119904 + 120590211989911990411991021199041198981205902119888119904 + 1205902119899119904120594SCNR
(7)
where 119910119904119898 is the clutter texture in the sum channel
22 Binary Detector In the wideband radar system thebinary detector is employed for the effective detection of anextended target in sea clutter because it can significantlydecrease the false alarm probability induced by the sea spikes[21ndash24] The binary detector is comprised of two stages Thefirst stage is essentially a simplified version of the likelihoodratio test (LRT)where a detection threshold119879 is set accordingto the quiescent clutter and noise levels For the 119898th rangecell the detector output is set to either 1 or 0 according to10038161003816100381610038161199041198981003816100381610038161003816 ⋛ 119879 997891997888rarr ℎ(1)119898 (8)
During this stage all range cell returns are quantified as 1 or0 The second stage detection operates upon these binary-detected range returns and a range sliding window 119873-of-119875 detector is used Suppose that 119870 range cell returns are
sampled We denote that 119895 isin 0 1 119870 minus 119875 + 1 and119872 =sum119895+119875minus1119898=119895 ℎ(1)119898 Then this stage is accomplished as
119872 ⋛ 119873 997891997888rarr ℎ(2)119898 (9)
If119872 ge 119873 this indicates the presence of a target in this rangesliding window and thus ℎ(2)119898 = 1 otherwise this indicatesthat the target is not present and thus ℎ(2)119898 = 0 Generally thelength of range sliding window is not shorter than the size oftarget
For the high resolution radar the sizes of range cellsare smaller than the scales of large features on the seasurface Therefore the correlation between the sea clutterfrom adjacent range cells that is the spatial correlation isgenerally more pronounced Modeling of the spatial corre-lation characteristics is very important for accurate perfor-mance prediction of binary detector For the compound 119870-distribution the spatial correlation can be characterized bythe correlation properties of the texture and speckle Due tothe absence of oversampling the speckle can be considereddecorrelated from one range cell to the next Here onlytwo bounding cases of spatial correlation for the texture arediscussed
As given in Table 1 by Watts [25] the spatial correlationlength of clutter in the different sea states is several to dozensof meters When the length of range sliding window is muchlarger than the spatial correlation length of clutter it can beassumed that the texture samples are independent within therange sliding window This case is denoted as the spatiallyindependent texture case On the contrary when the lengthof range sliding window is smaller than the spatial correlationlength of clutter it can be assumed that the texture samplesare completely correlated in the range sliding window Thiscase is denoted as the spatially correlated texture case
For the spatially independent texture case the false alarmprobability of the first stage detection denoted as 1198751198911 can beexpressed as
1198751198911 = intinfin119879intinfin0119901 (10038161003816100381610038161198881199041198981003816100381610038161003816 | 119910s119898) 119901 (119910119904119898) 119889119910119904119898119889 10038161003816100381610038161198881199041198981003816100381610038161003816
= intinfin0
exp(minus |119879|211991021199041198981205902119888119904 + 1205902119899119904)119901 (119910119904119898) 119889119910119904119898(10)
where 119901(119910119904119898) is the pdf of 119910119904119898 given by (5) Thus theoverall false alarm probability for the binary detector can becomputed by summing over the false alarm occurrences ofthe binomial pdf as
1198751198651 = 119875sum119898=119873
1198621198751198981198751198981198911 (1 minus 1198751198911)119875minus119898 (11)
where 119862119875119898 is the number of combinations of 119875 items taken119898at a timeThe detection probability of the first stage detectioncan be obtained as1198751198891 = 119901119889 10038161003816100381610038161199041198981003816100381610038161003816 ge 119879= intinfin0
exp(minus |119879|2(1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904))119901 (119910119904119898) 119889119910119904119898(12)
4 Mathematical Problems in Engineering
Similar to the computation of the overall false alarm proba-bility the overall detection probability for the binary detectorcan be expressed as
1198751198631 = 119901119889 119872 ge 119873 = 119875sum119898=119873
1198621198751198981198751198981198891 (1 minus 1198751198891)119875minus119898 (13)
However for the spatially correlated texture case 119910119904119898is constant within the range sliding window but variesevidently with range sliding window locations Hence thecalculating methods of the overall false alarm probabilityand the overall detection probability in this case are differentfrom those in the independent texture case For the first stagedetection given the local mean level value 119910119904119898 the local falsealarm probability 1198751198912 and detection probability 1198751198892 can becomputed as
1198751198912 = intinfin119879119901 (10038161003816100381610038161198881199041198981003816100381610038161003816 | 119910119904119898) 119889 10038161003816100381610038161198881199041198981003816100381610038161003816
= exp(minus |119879|211991021199041198981205902119888119904 + 1205902119899119904) (14)
1198751198892 = 119901119889 10038161003816100381610038161199041198981003816100381610038161003816 ge 119879 | 119910119904119898= exp(minus |119879|2(1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904))
(15)
Then the overall probability of false alarm and detection forthe binary detector can be computed by summing over thelocal probabilities of false alarm and detection of the binomialpdf and then by averaging over all possible values of the localmean level They are given by
1198751198652 = intinfin0
119875sum119898=119873
1198621198751198981198751198981198912 (1 minus 1198751198912)119875minus119898 119901 (119910119904119898) 119889119910119904119898 (16)
1198751198632 = 119901119889 119872 ge 119873= intinfin0
119875sum119898=119873
1198621198751198981198751198981198892 (1 minus 1198751198892)119875minus119898 119901 (119910119904119898) 119889119910119904119898 (17)
Once the overall false alarm probability and the parametersof binary detector are given the detection threshold of theLRT in the first stage detection can be determined by (10)and (11) for the spatially independent texture case and by (14)and (16) for the spatially correlated texture case Then theaggregated detection probabilities in both these two cases canbe computed
3 Angle Measurement Performance ofWideband Monopulse Radar
31 Angle Measurement Error of Wideband Monopulse RadarWithout loss of generality we do not consider the imple-mentation type of the monopulse radar In a practical envi-ronment the received radar signal usually contains clutternoise and interferenceTheMR is a complex number In realapplications the real part of the complexMR(CMR) is widely
used to extract the angle of arrival (DOA) of a target whichis defined as [1 10]
119903 = Re119889119904 (18)
where 119904 and 119889 respectively are the complex-valued samplesof receiving signals simultaneously obtained from the sumand difference channels Resdot denotes the real part of acomplex value 119903 is the monotone function of DOA 120579 of theobserved target Usually the relationship between 119903 and 120579 canbe approximated by a linear function namely
120579 asymp 120579BW119896119898 119903 (19)
where 120579BW is the 3 dB beamwidth of the sum pattern and 119896119898denotes monopulse slope
We assume that 119872 range cell returns are determined tohave the probable presence of a target and the presence of atarget is determined by the detection process According to(18) and (19) we can obtain the angle value 120579119898 for each rangecell of target The geometrical center angle of target is thenacquired by weighting processing on all angle values that is
120579 = 119872sum119898=1
120572119898120579119898 (20)
where 120572119898 is weighting operatorThe commonly used weight-ing operators include uniform weighting linear weightingand power weighting To simplify the analysis the uniformweighting method is adopted that is 120572119898 = 1119872
When clutter and noise are absent the MR in the 119898thrange cell is denoted as 120578119898 = 119889119898119904119898 It is a real number Themonopulse slope 119896119898 is assumed to be constant for all rangecell returns from the same targetThus according to (20) theMR associated with the real geometrical center angle of targetcan be written as
120578 = 1119872 119872sum119898=1120578119898 = 1119872 119872sum119898=1119889119898119904119898 (21)
The flare angle of target and the corresponding MR aredenoted as Δ120579 and Δ120578 respectively Δ120579 is related to the targetsize and the radar working range When radar works in thefar field we can use the approximations Δ120579 asymp 0 and 120578119898 asymp 120578Here the angle measurement error induced by the flare angleof target is ignored When the target return is submerged inthe sea clutter and noise the CMR of target return of singlerange cell is denoted as
120578119898 = 119889119898119904119898 = 119889119898 + 119888119889119898 + 119899119889119898119904119898 + 119888119904119898 + 119899119904119898 (22)
Then the CMR error of target can be expressed as
120576 = 1119872 119872sum119898=1120578119898 minus 1119872 119872sum119898=1120578119898 = 1119872 119872sum119898=1(119889119898119904119898 minus 119889119898119904119898 )= 1119872 119872sum119898=1120576119898
(23)
Mathematical Problems in Engineering 5
where 120576119898 is the CMR error of single range cell By using 120578119898 asymp120578 120576119898 can be expressed as
120576119898 = 119889119898119904119898 minus 119889119898119904119898 asymp (119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)119904119898 + 119888119904119898 + 119899119904119898 (24)
The denominator in (24) is denoted as 119878119898 = 119904119898+119888119904119898+119899119904119898 andthe numerator is denoted as119863119898 = (119888119889119898 +119899119889119898) minus 120578(119888119904119898 +119899119904119898)Here119863119898 represents the error sources of angle measurementincluding the clutter and noise in both the sum and differencechannels Moreover the contribution of (119888119889119898 + 119899119889119898) to theerror is given by (119888119889119898 + 119899119889119898)(119904119898 + 119888119904119898 + 119899119889119898) and thecontribution of (119888119904119898 + 119899119904119898) to the error is given by 120578(119888s119898 +119899119904119898)(119904119898 + 119888119904119898 + 119899119889119898) The effect of the clutter plus noise ofsum channel is related to the location of target in the beamThen we can get 119864[119878119898] = 0 and 119864[119863119898] = 0 The conditionalvariances of 119878119898 and119863119898 can be represented as
119886 = radic12 (119864 [1003816100381610038161003816119863119898 minus 119864 [119863119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12 [11991021198891198981205902119888119889 + 1205902119899119889 + 1205782 (11991021199041198981205902119888119904 + 1205902119899119904) minus 21205881120578119910119904119898120590119888119904119910119889119898120590119888119889]
119887 = radic12 (119864 [1003816100381610038161003816119878119898 minus 119864 [119878119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12119864 1003816100381610038161003816119904119898 + 119888119904119898 + 11989911990411989810038161003816100381610038162 = radic12 (1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904)
(25)
where 1205881 is the real part of conditional correlation of clutterbetween the sum and the difference channels This condi-tional correlation can be represented as
1205851 = 1205881 + 1198951205891 = 119864 119888lowast119904119898119888119889119898 | 119910119904119898 119910119889119898radic119864 119888lowast119904119898119888119904119898 | 119910119904119898radic119864 119888lowast119889119898119888119889119898 | 119910119889119898= 119864 119910119904119898119910119889119898119909lowast119904119898119909119889119898 | 119910119904119898 119910119889119898119910119904119898119910119889119898120590119888119904120590119888119889 = 119864 119909lowast119904119898119909119889119898120590119888119904120590119888119889= 120585119909
(26)
where 1205891 is imaginary part of 1205851 1205881 and 1205891 are bounded by12058821 + 12058921 le 1 120585119909 is the correlation between the specklesof the sum and the difference channels The superscript lowastdenotes the conjugate operation From (26) we observe thatthe conditional correlation 1205851 is equivalent to the specklecorrelation 120585119909 Then the conditional correlation between 119878119898and119863119898 is given by
120585120576 = 119864 (119904119898 + 119888119904119898 + 119899119904119898)lowast [(119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)] | 119910119904119898 1199101198891198982119886119887 = 1199101199041198981205901198881199042119886119887 (1205881119910119889119898120590119888119889 minus 120578119910119904119898120590119888119904)+ 1198951199101199041198981199101198891198981205901198881199041205901198881198892119886119887 1205891 = 120588120576 + 119895120589120576 (27)
where 120588120576 and 120589120576 are the real and imaginary parts of 120585120576respectively and are bounded by 1205882120576 + 1205892120576 le 1 It should benoted that 120588120576 and 120589120576 have 119910119904119898 and 119910119889119898 dependencies but theyare constant in the Gaussian noise case
32 Exact Solution for Conditional pdf of MR Error Let usdefine
119871119898 = 10038161003816100381610038161199041198981003816100381610038161003816radic119864 [1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 | 119910119904119898] (28)
Denote119876120576119898 = 119863119898119878119898 The CMR error 119902120576 can be representedby the terms of its real and imaginary parts namely 119902120576119898 =119903120576119898 + 119895119905120576119898 Thus the joint pdf of 119876120576119898 and 119871119898 can berepresented as follows [10]
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898) = 211989731198981205871205832 (1 + 1205942)2times exp(minus[ 1198972119898(1 + 1205942) + 1198972119898(1 + 1205942) 1205832 (119903120576119898 minus 119886119887120588120576)2+ 1198972119898(1 + 1205942) 1205832 (119905120576119898 minus 119886119887 120589120576)2])
(29)
where 1205942 120588120576 120589120576 119886 and 119887 are defined previously and
120583 = 119886119887radic1 minus 1205882120576 minus 1205892120576 (30)
It should be noted that the variation of the underlying powerdue to the 119870-distribution assumption now causes the pdf in(29) to have 119910119904119898 and 119910119889119898 dependencies
At the first stage of detection process Δ 1 = |119904119898| ge 119879denotes the event that the radar return of single range cellin the sum channel exceeds the detection threshold 1198970 =119879radic119864[|119888119904119898 + 119899119904119898|2 | 119910119904119898] denotes the detection threshold ofthe LRT normalized with respect to the conditional root-mean-squared sum channel clutter plus noise power Itshould be noted that the normalized values of 119871119898 and 1198970 alsohave a 119910119904119898 dependence under the119870-distribution assumptionThe resulting distribution conditioned on the occurrence ofevent Δ 1 is then obtained by integrating with respect tovariables 119905120576119898 and 119897119898 as follows
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898 Δ 1)= 1205832119875119889radic120587119861minus32
6 Mathematical Problems in Engineering
times radic1205872 [[[1 minus erf( 1198611198970120583radic(1 + 1205942))]]]
+ 1198611198970120583radic(1 + 1205942) exp[minus119861211989720(1 + 1205942) 1205832]
= 119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)119875119889
(31)
where 119861 = 1205832 + (119903120576119898 minus (119886119887)120588120576)2 erf(119911) = (2radic120587) int1199110 119890minus1199052119889119905 iserror function and 119875119889 = 119875|119904119898| ge 119879 | 119910119904119898 is the detectionprobability with the given 119910119904119898 during the first stage detection
Analogous to the effect on the detection performance thespatial correlation of clutter also affects angle measurementperformance of radar We assume that the spatial correlationof the difference channel clutter is the same as the one of thesum channel clutter In the spatially independent texture casethe value of 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1) is averaged over all
possible values of 119910119904119898 and 119910119889119898 to compute the conditionalpdf of MR error of single range cell return of target (denotedby 119901119877120576119898(119903120576119898 | Δ 1)) that is
119901119877120576119898 (119903120576119898 | Δ 1) = 11198751198891sdot intinfin0intinfin0119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)
sdot 119901 (119910119904119898 119910119889119898) 119889119910119904119898119889119910119889119898(32)
where 1198751198891 is the detection probability of the first stagedetector in the spatially independent texture case and is givenby (12) 119901(119910119904119898 119910119889119898) is the joint pdf of 119910119904119898 and 119910119889119898
It is assumed that119872 range cell returns have been detectedto determine the probable presence of a target in the localrange region [119895 119895 + 119875 minus 1) at the first stage of detectionprocessing Let 119901(119903120576 | 119872) denote the conditional pdf ofMR error when119872 range cell returns are used to extract theDOA of target It can be assumed that for each range cell119901119877120576119898|Δ 1(119903120576119898) is independent and obeys the distribution in(32) Denoting 119903120576_sum = sum119872119898=1 119903120576119898 and 119903120576 = 119903120576_sum119872 theconditional pdf of 119903120576_sum can be computed as [26]
119901sum (119903120576_sum | 119872) = 1199011198771205761 (1199031205761 | Δ 1) otimes 1199011198771205762 (1199031205762 | Δ 1) otimes sdot sdot sdot otimes 119901119877120576119872 (119903120576119872 | Δ 1) (33)
where otimes is convolution operation Thus we can obtain 119901(119903120576 |119872) = 119872119901sum(119872119903120576 | 119872) Additionally the probability of119872times occurrences of the event Δ 1 at the first stage detectionprocessing can be written as 119901119889119872 = 1198621198751198721198751198721198891 (1 minus 1198751198891)119875minus119872Then we can obtain that
119901 (119903120576119872) = 119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus119872 (34)
At the second stage of detection processing Δ 2 = 119872 ge119873 is denoted as the event of the target presence For theindependent texture case the pdf ofMR error under the eventΔ 2 can then be expressed as
119901119877120576|Δ 2 (119903120576) = 119901 (119903120576119872 ge 119873)119901119889 (119872 ge 119873)= sum119875119872=119873119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus1198721198751198631 (35)
where 1198751198631 is the overall detection probability in the spatiallyindependent texture case and is given by (13)
In the spatially correlated texture case the derivationprocess of the conditional pdf of MR error is similar tothat in the spatially independent texture case The analogousformulas with (33) (34) and (35) can be obtained by thesimple substitutions of 1198751198892 and 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1)for 1198751198891 and 119901119877120576119898(119903120576119898 | Δ 1) and they are denoted by 119901(119903120576 |119872 119910119904119898 119910119889119898) 119901(119903120576119872 | 119910119904119898 119910119889119898) and 119901(119903120576 | 119910119904119898 119910119889119898)They have 119910119904119898 and 119910119889119898 dependencies Therefore the overallconditional pdf of MR error for the spatially correlated
texture case is computed by averaging the MR errors over allpossible values of 119910119904119898 and 119910119889119898 that is
119901119877120576|Δ 2 (119903120576) = intinfin0intinfin0119901119877120576|Δ 2 (119903120576 | 119910119888119904 119910119888119889)
sdot 119901 (119910119888119904 119910119888119889 | Δ 2) 119889119910119888119904119889119910119888119889 = 11198751198632sdot intinfin0intinfin0
119875sum119872=119873
119862119875119872119901 (119903120576 | 119872 119910119888119904 119910119888119889)sdot 1198751198721198892 (1 minus 1198751198892)119875minus119872 119901 (119910119888119904 119910119888119889) 119889119910119888119904119889119910119888119889
(36)
where 1198751198892 and 1198751198632 are the first and second stage detectionprobabilities in the spatially correlated texture case and aregiven by (15) and (17) respectively
In the above analysis the joint pdf119901(119910119904119898 119910119889119898) is involvedThis pdf describes the distribution of the clutter texturesof the sum and difference channels within the same rangecell Generally the clutter returns in the sum and differencechannels are from the scattering of the common illuminatingsea surface region Hence the correlation of the texturecomponents of the sea clutter between the sum and differencechannels within the same range cell is also pronouncedMoreover because the directions of the sum and differencepatternmain lobes are not consistent and the clutter intensityis dominated by the antenna pattern gain the texture cor-relations are different for different range cells Herein twobounding situations (ie 119910119904119898 and 119910119889119898 are independent and
Mathematical Problems in Engineering 7
are completely correlated) are considered separately When119910119904119898 and 119910119889119898 are independent 119901(119910119904119898 119910119889119898) can be separatedand can be rewritten as 119901(119910119904119898 119910119889119898) = 119901(119910119904119898)119901(119910119889119898) When119910119904119898 and 119910119889119898 are completely correlated the values of 119910119904119898 and119910119889119898 within the same range cell are the same All involvingpdfs of monopulse angle measurement errors have only a 119910119904119898dependence Therefore the double integrals in (32) and (36)are reduced to the single integral
We wish to determine the error in an estimate of targetangle due to the clutter and noise Using (35) and (36) theconditional moments of 119903120576 are then given by
119864 [119903119899120576 | Δ 2] = intinfinminusinfin
119903119899120576119901119877120576|Δ 2 (119903120576) 119889119903120576 119899 = 1 2 (37)
For 119899 is equal to unity and two the first and second momentsof 119903120576 can be obtained by integrating (37) which are denotedas 119864[119903120576 | Δ 2] and 119864[1199032120576 | Δ 2] respectively Also the firstmoment is named the mean error (bias) Although each ofthe clutter and noise variables has a distribution with zeromean value the mean error is not zero and it cannot exceedthe width of the main lobe The square root of the secondmoment is named the RMSE and is denoted by Υ[119903120576 | Δ 2]In practice the RMSE is desired to measure the error and itis widely used to assess the performance for various kinds ofmeasurement results It is the combined effect of the meanerror and the STD from thismean errorThe conditional STDof 119903120576 is denoted as 120590[119903120576 | Δ 2] and it can be obtained from
1205902 [119903120576 | Δ 2] = 119864 [1199032120576 | Δ 2] minus (119864 [119903120576 | Δ 2])2 (38)
It is interesting to note that in theory this conditional STDof 119903120576 is infinite when the condition of Δ 2 is removed [1 10]In actual practice however the conversion from monopulseratio to angle is implemented as being within the main lobeand the target is also presumed to be within the main lobeThe conditional STD of 119903120576 is finite and its maximum possiblevalue is of the order of the beamwidth Consequently Υ[119903120576 |Δ 2] is also finite and its maximum possible value is of theorder of the beamwidth In our discussion Υ[119903120576 | Δ 2] isapplied to assess the performance of the angle measurementof wideband monopulse radar in clutter plus noise and 119864[119903120576 |Δ 2] and 120590[119903120576 | Δ 2] are applied to determine the maincontributions of the clutter and noise to angle error
4 Simulation Results and Analysis
41 Optimal Binary Detection Good detection performanceand angle measurement accuracy are two main goals ofwideband monopulse radar design Generally only whenthe target appears in the detected result the processingof monopulse angle measurement is carried out Hereinthe detection performance of the binary detector is firstlyanalyzed in the background of 119870-distributed sea clutter plusGaussian noise As in the researches [22 27] the optimalparameter settings are defined as the values of the binarydetector parameters which make the detector establish agiven detection probability at a given false alarm probabilitywith the least SCNR It is assumed that the parameter 119875 of
binary detector in our simulations is optimal According tothe results given in [22] it can be set to be equal to the targetradial length This optimal value of 119875 is denoted as 119875opt
The 119870-distributed sea clutters are generated by usingthe spherically invariant random process (SIRP) methodThe 20000 Monte Carlo experiments are conducted Inthe simulation the overall false alarm probability is set to10minus4 and the required detection thresholds of the LRT arecomputed theoretically by (10) and (11) for the spatiallyindependent texture case and by (14) and (16) for the spa-tially correlated texture case Those detection thresholds arethen used to obtain the theoretical and simulated detectionprobabilities The variations of theoretical and simulateddetection probabilitieswith different values of binary detectorparameter 119873 for two bounding cases are shown in Figure 1where 119873119868 and 119873119862 are denoted as the values of 119873 for thespatially independent texture case and the spatially correlatedtexture case respectively
From Figure 1 we first observe that the simulated detec-tion probability agrees well with the theoretical detectionprobability for both two cases This demonstrates that equa-tions (10)ndash(17) are correct Second we observe that for fixedvalues of V119888119904 in contrast with the spatially independent tex-ture case the detection probability of the spatially correlatedtexture case decreases However the deterioration degreedecreases with the increase of V119888119904 This can be explainedintuitively that the overall false alarm rate is dominated bya localized area of high clutter in the spatially correlatedtexture case but it is dominated by the occasional regionsof high clutter in the spatially independent texture caseConsequently in order to keep the same overall false alarmrate the fixed first threshold of the binary detector in thespatially correlated texture case is required to set a highervalue than that in the spatially independent texture caseNevertheless the bigger the values of V119888119904 are the closer arethe fixed first thresholds of two cases Thus the detectionprobabilities of the spatially correlated texture case are closeto those of the spatially independent texture case Similarresults were also obtained in [25]
As mentioned above the value of 119873 is chosen as theoptimal setting of the binary detector second threshold whenthe binary detector requires the least SCNR to establish agiven detection probability 119875119863 = 09 at a given false alarmprobability 119875119865 = 10minus4 Therefore we can see from Figure 1(a)that119873119868 = 4 is the optimal parameter setting for the spatiallyindependent texture case where V119888119904 = 1 However the valueof the optimal binary detector parameter is119873opt = 5 for thiscase by using the experiential formula in [22] The reason forthis is that our theoretical and simulated results are obtainedin the background of K-distributed sea clutter plus noisebut the experiential formula is derived in the background ofonly the K-distributed sea clutter Moreover in the practicalapplication the optimal parameter can be selected withina reasonable range In Figure 1(a) the performances of thebinary detectors of which the parameters are selected as119873119868 = 4 and 119873119868 = 5 respectively are very close when theirdetection probabilities satisfy 119875119889 gt 06 Thus it is acceptedthat 119873119868 = 5 is also the optimal parameter setting When
8 Mathematical Problems in Engineering
0 2 4 6 10 12 14 16800
01
02
03
04
05
06
07
08
09
10
Spatially correlated texture case
Spatially independenttexture case
Det
ectio
n pr
obab
ility
SCNR (dB)
Simulated NI = 3NC = 1Theoretical NI = 3NC = 1Simulated NI = 4NC = 2Th o et a I 4 N =
S u a e I 5 N =Th o et a I 5 N =S u a e I 6 N =Th o et a I 6 N =
(a)
Spatially independent texture case
Spatially correlated texture case
Simulated NI = 2NC = 1
Theoretical NI = 2NC = 1
Simulated NI = 3NC = 2
Theoretical NI = 3NC = 2
Simulated NI = 4NC = 3
Theoretical NI = 4NC = 3
Simulated NI = 5NC = 4
Theoretical NI = 5NC = 4
2 4 6 8 10 120SCNR (dB)
00
01
02
03
04
05
06
07
08
09
10
Det
ectio
n pr
obab
ility
(b)
Figure 1 Theoretical and simulated radar detection probabilities for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and CNR = 10 dB (black spatiallyindependent texture case gray spatially correlated texture case) (a) V119888119904 = 1 (b) V119888119904 = 25V119888119904 = 25 the optimal parameter setting is119873opt = 3 accordingto the experiential formula for the spatially independenttexture case We can see from Figure 1(b) that the detectionperformance of the detector is also optimal when 119873119868 =3 Similarly we can see from Figure 1 that 119873119862 = 2 and119873119862 = 3 are the optimal settings of the binary detector secondthreshold for both V119888119904 = 1 and V119888119904 = 25 in the spatiallycorrelated texture case It seems that these results are notconsistent with the known results in [27] This is because in[27] only the K-distributed sea clutter was considered
The above simulation demonstrates that the experien-tial formula given in [22] and the results given in [27]cannot be referred to in order to determinate the optimalparameter 119873opt of binary detector for the case that theradar returns include the 119870-distributed sea clutter and noisesimultaneously Although the spatial correlation of texturecomponents affects the value of optimal second thresholdsetting of the binary detector it should be noticed that forlarge clutter shape parameter the optimal parameter settingin the spatially correlated texture case is close to that in thespatially independent texture case Moreover the optimalparameter setting of 119873 in the spatially independent texturecase is also the suboptimal parameter setting in the spatiallycorrelated texture case for the small shape parameter suchas 119873119862 = 4 shown in Figure 1(a) Therefore in the followinginvestigation the optimal parameter setting is discussed onlyfor the spatially independent texture case
In Figure 2119873opt is plotted against CNR for different shapeparameters of sea clutter As we can see from these curves
= 1
= 4
= 12
= 16
= 8
789
101112131415161718
Nop
t
minus8 minus6 minus4 minus2 0 2 4 6 8minus10 12 14 16 18 2010CNR (dB)
Figure 2119873opt against CNR in different shape parameters for 1205902119899119904 =1 119875119891 = 10minus4 and 119875opt = 30119873opt is a monotonously nondecreasing function of CNR Foreach curve there are three CNR regions that is the lowCNR region (eg less than minus8 dB) the middle CNR region(eg from minus8 dB to 15 dB) and the high CNR region (eggreater than 15 dB) In the middle CNR region the value of119873opt increases with the increase of CNR for the same clutter
Mathematical Problems in Engineering 9
shape parameter This is because the proportion of the effectof clutter on detection performance increases as the CNRincreases In other two CNR regions the value of 119873opt isunrelated to the CNR In the low CNR region the effectof noise on detection performance is dominant and that ofclutter can be ignored So119873opt is a constant for all cases Onthe contrary in the high CNR region the effect of clutteron detection performance is dominant and that of noise canbe ignored Thus the optimal parameter of binary detectorcan be selected by using the experiential formula given in
[22] Based on above analysis the experiential formula canbe modified to guide the application of the binary detectorwhen target submerges in the K-distributed sea clutter plusnoise The modified experiential formula is given as follows
When CNR lt minus8 dB119873opt asymp round [027119875opt] (39)
When minus8 dB le CNR lt 15 dB
119873opt asymp round [(CNR + 8)23 065]minus025119875opt + (15 minus CNR)23 027119875opt] ] lt 10round [(CNR + 8)23 034119875opt + (15 minus CNR)23 027119875opt] ] ge 10 (40)
When CNR gt 15 dB119873opt asymp
round [065]minus025119875opt] ] lt 10round [034119875opt] ] ge 10 (41)
where round[sdot] denotes rounding operation It should bestated that under the constraint that the difference ofdetection performance is no more than 02 dB this modifiedexperiential formula can be applied for different119875opt and119873optcan be selected within some ranges so that this formula isnot unique In addition although this modified experientialformula is obtained under the condition that 119875119891 = 10minus4 and119875119863 = 09 it can be confirmed that the validity conditionsof this formula can be extended to 10minus4 ge 119875119865 ge 10minus10and 06 le 119875119863 le 095 according to the further numericalcalculation
42 Angle Measurement Performance In this section curvesof 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] and Υ[119903120576 | Δ 2] against relevantparameters are shown to analyze the angle measurementperformance with wideband monopulse radar Because theexact analytical formulas of 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] andΥ[119903120576 | Δ 2] cannot be derived all results in this sectionare obtained by numerical integration method It is assumedthat the angle measurements in the elevation and azimuthdirections can be regarded to be independent of each otherThus the patterns of the sum and difference channels ineither direction can be represented as two one-dimensionalpatterns A simulated monopulse antenna model is used toevaluate the performance of anglemeasurementThepatternsin the sum and difference channels can be represented as [13]
119892Σ (120579) = radic4120587120582 radic119882[ sin (ℎ (120579))ℎ (120579) ]119892Δ (120579) = radic4120587120582 radic3119882[ sin (ℎ (120579))ℎ (120579)2 minus cos (ℎ (120579))ℎ (120579) ] (42)
where ℎ(120579) = 120587(119882120582) sin(120579) 120582 is wavelength 119882 is thedimension of the antenna and 120579 is the deviation angle from
boresight We set 120582 = 8mm and 119882 = 322 cm Hence thebeamwidth is about 142 degrees It is worth pointing outthat in off-axis measurement the error of angle estimationin clutter increases as the deviation angle of off-axis targetincreases Nevertheless the results of the effect of clutter onthe angle estimation error can exhibit the similar behavior nomatter where the target locates in the main lobeThe analysisconclusion can be obtained from the results with a givendeviation angle Hence in our simulations the deviationangle of the off-axis target is set to 03 degrees
421 Effect of the Binary Detector Parameter 119873 The choiceof the binary detector parameter 119873 will affect not onlythe detection results but also the number of range cellsapplied to obtain the angle measurement Accordingly thedifferent values of the binary detector parameter119873will bringthe different angle measurement performances In Figure 3Υ[119903120576 | Δ 2] is plotted against SCNR of sum channel fordifferent values of 119873 Four different correlation cases areinvestigated It is assumed that in the simulation the cluttershape parameters of sum and difference channels are thesame
It can be observed from Figures 3(a) and 3(b) that in thespatially independent texture case the performance of anglemeasurement can be improved significantly by increasing thevalues of 119873 when SCNR is low yet its improvement slowsdown when SCNR is high Instead there are small differencesamong the performances of angle measurement for differentvalues of 119873 in the spatially correlated texture case Compar-ing Figures 3(c) and 3(d) to Figures 3(a) and 3(b) we see thatthe values of Υ[119903120576 | Δ 2] in the spatially correlated texturecase are higher than those in the spatially independent texturecase for the same SCNR and119873 This implies that an increasein spatial correlation of the texture components results in adegeneration of the angle measurement performance for thewideband monopulse radar On the other hand comparingFigures 3(b) and 3(d) to Figures 3(a) and 3(c) we do notsee the significant differences of Υ[119903120576 | Δ 2] for differentcorrelations of the clutter texture components between the
10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Similar to the computation of the overall false alarm proba-bility the overall detection probability for the binary detectorcan be expressed as
1198751198631 = 119901119889 119872 ge 119873 = 119875sum119898=119873
1198621198751198981198751198981198891 (1 minus 1198751198891)119875minus119898 (13)
However for the spatially correlated texture case 119910119904119898is constant within the range sliding window but variesevidently with range sliding window locations Hence thecalculating methods of the overall false alarm probabilityand the overall detection probability in this case are differentfrom those in the independent texture case For the first stagedetection given the local mean level value 119910119904119898 the local falsealarm probability 1198751198912 and detection probability 1198751198892 can becomputed as
1198751198912 = intinfin119879119901 (10038161003816100381610038161198881199041198981003816100381610038161003816 | 119910119904119898) 119889 10038161003816100381610038161198881199041198981003816100381610038161003816
= exp(minus |119879|211991021199041198981205902119888119904 + 1205902119899119904) (14)
1198751198892 = 119901119889 10038161003816100381610038161199041198981003816100381610038161003816 ge 119879 | 119910119904119898= exp(minus |119879|2(1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904))
(15)
Then the overall probability of false alarm and detection forthe binary detector can be computed by summing over thelocal probabilities of false alarm and detection of the binomialpdf and then by averaging over all possible values of the localmean level They are given by
1198751198652 = intinfin0
119875sum119898=119873
1198621198751198981198751198981198912 (1 minus 1198751198912)119875minus119898 119901 (119910119904119898) 119889119910119904119898 (16)
1198751198632 = 119901119889 119872 ge 119873= intinfin0
119875sum119898=119873
1198621198751198981198751198981198892 (1 minus 1198751198892)119875minus119898 119901 (119910119904119898) 119889119910119904119898 (17)
Once the overall false alarm probability and the parametersof binary detector are given the detection threshold of theLRT in the first stage detection can be determined by (10)and (11) for the spatially independent texture case and by (14)and (16) for the spatially correlated texture case Then theaggregated detection probabilities in both these two cases canbe computed
3 Angle Measurement Performance ofWideband Monopulse Radar
31 Angle Measurement Error of Wideband Monopulse RadarWithout loss of generality we do not consider the imple-mentation type of the monopulse radar In a practical envi-ronment the received radar signal usually contains clutternoise and interferenceTheMR is a complex number In realapplications the real part of the complexMR(CMR) is widely
used to extract the angle of arrival (DOA) of a target whichis defined as [1 10]
119903 = Re119889119904 (18)
where 119904 and 119889 respectively are the complex-valued samplesof receiving signals simultaneously obtained from the sumand difference channels Resdot denotes the real part of acomplex value 119903 is the monotone function of DOA 120579 of theobserved target Usually the relationship between 119903 and 120579 canbe approximated by a linear function namely
120579 asymp 120579BW119896119898 119903 (19)
where 120579BW is the 3 dB beamwidth of the sum pattern and 119896119898denotes monopulse slope
We assume that 119872 range cell returns are determined tohave the probable presence of a target and the presence of atarget is determined by the detection process According to(18) and (19) we can obtain the angle value 120579119898 for each rangecell of target The geometrical center angle of target is thenacquired by weighting processing on all angle values that is
120579 = 119872sum119898=1
120572119898120579119898 (20)
where 120572119898 is weighting operatorThe commonly used weight-ing operators include uniform weighting linear weightingand power weighting To simplify the analysis the uniformweighting method is adopted that is 120572119898 = 1119872
When clutter and noise are absent the MR in the 119898thrange cell is denoted as 120578119898 = 119889119898119904119898 It is a real number Themonopulse slope 119896119898 is assumed to be constant for all rangecell returns from the same targetThus according to (20) theMR associated with the real geometrical center angle of targetcan be written as
120578 = 1119872 119872sum119898=1120578119898 = 1119872 119872sum119898=1119889119898119904119898 (21)
The flare angle of target and the corresponding MR aredenoted as Δ120579 and Δ120578 respectively Δ120579 is related to the targetsize and the radar working range When radar works in thefar field we can use the approximations Δ120579 asymp 0 and 120578119898 asymp 120578Here the angle measurement error induced by the flare angleof target is ignored When the target return is submerged inthe sea clutter and noise the CMR of target return of singlerange cell is denoted as
120578119898 = 119889119898119904119898 = 119889119898 + 119888119889119898 + 119899119889119898119904119898 + 119888119904119898 + 119899119904119898 (22)
Then the CMR error of target can be expressed as
120576 = 1119872 119872sum119898=1120578119898 minus 1119872 119872sum119898=1120578119898 = 1119872 119872sum119898=1(119889119898119904119898 minus 119889119898119904119898 )= 1119872 119872sum119898=1120576119898
(23)
Mathematical Problems in Engineering 5
where 120576119898 is the CMR error of single range cell By using 120578119898 asymp120578 120576119898 can be expressed as
120576119898 = 119889119898119904119898 minus 119889119898119904119898 asymp (119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)119904119898 + 119888119904119898 + 119899119904119898 (24)
The denominator in (24) is denoted as 119878119898 = 119904119898+119888119904119898+119899119904119898 andthe numerator is denoted as119863119898 = (119888119889119898 +119899119889119898) minus 120578(119888119904119898 +119899119904119898)Here119863119898 represents the error sources of angle measurementincluding the clutter and noise in both the sum and differencechannels Moreover the contribution of (119888119889119898 + 119899119889119898) to theerror is given by (119888119889119898 + 119899119889119898)(119904119898 + 119888119904119898 + 119899119889119898) and thecontribution of (119888119904119898 + 119899119904119898) to the error is given by 120578(119888s119898 +119899119904119898)(119904119898 + 119888119904119898 + 119899119889119898) The effect of the clutter plus noise ofsum channel is related to the location of target in the beamThen we can get 119864[119878119898] = 0 and 119864[119863119898] = 0 The conditionalvariances of 119878119898 and119863119898 can be represented as
119886 = radic12 (119864 [1003816100381610038161003816119863119898 minus 119864 [119863119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12 [11991021198891198981205902119888119889 + 1205902119899119889 + 1205782 (11991021199041198981205902119888119904 + 1205902119899119904) minus 21205881120578119910119904119898120590119888119904119910119889119898120590119888119889]
119887 = radic12 (119864 [1003816100381610038161003816119878119898 minus 119864 [119878119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12119864 1003816100381610038161003816119904119898 + 119888119904119898 + 11989911990411989810038161003816100381610038162 = radic12 (1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904)
(25)
where 1205881 is the real part of conditional correlation of clutterbetween the sum and the difference channels This condi-tional correlation can be represented as
1205851 = 1205881 + 1198951205891 = 119864 119888lowast119904119898119888119889119898 | 119910119904119898 119910119889119898radic119864 119888lowast119904119898119888119904119898 | 119910119904119898radic119864 119888lowast119889119898119888119889119898 | 119910119889119898= 119864 119910119904119898119910119889119898119909lowast119904119898119909119889119898 | 119910119904119898 119910119889119898119910119904119898119910119889119898120590119888119904120590119888119889 = 119864 119909lowast119904119898119909119889119898120590119888119904120590119888119889= 120585119909
(26)
where 1205891 is imaginary part of 1205851 1205881 and 1205891 are bounded by12058821 + 12058921 le 1 120585119909 is the correlation between the specklesof the sum and the difference channels The superscript lowastdenotes the conjugate operation From (26) we observe thatthe conditional correlation 1205851 is equivalent to the specklecorrelation 120585119909 Then the conditional correlation between 119878119898and119863119898 is given by
120585120576 = 119864 (119904119898 + 119888119904119898 + 119899119904119898)lowast [(119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)] | 119910119904119898 1199101198891198982119886119887 = 1199101199041198981205901198881199042119886119887 (1205881119910119889119898120590119888119889 minus 120578119910119904119898120590119888119904)+ 1198951199101199041198981199101198891198981205901198881199041205901198881198892119886119887 1205891 = 120588120576 + 119895120589120576 (27)
where 120588120576 and 120589120576 are the real and imaginary parts of 120585120576respectively and are bounded by 1205882120576 + 1205892120576 le 1 It should benoted that 120588120576 and 120589120576 have 119910119904119898 and 119910119889119898 dependencies but theyare constant in the Gaussian noise case
32 Exact Solution for Conditional pdf of MR Error Let usdefine
119871119898 = 10038161003816100381610038161199041198981003816100381610038161003816radic119864 [1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 | 119910119904119898] (28)
Denote119876120576119898 = 119863119898119878119898 The CMR error 119902120576 can be representedby the terms of its real and imaginary parts namely 119902120576119898 =119903120576119898 + 119895119905120576119898 Thus the joint pdf of 119876120576119898 and 119871119898 can berepresented as follows [10]
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898) = 211989731198981205871205832 (1 + 1205942)2times exp(minus[ 1198972119898(1 + 1205942) + 1198972119898(1 + 1205942) 1205832 (119903120576119898 minus 119886119887120588120576)2+ 1198972119898(1 + 1205942) 1205832 (119905120576119898 minus 119886119887 120589120576)2])
(29)
where 1205942 120588120576 120589120576 119886 and 119887 are defined previously and
120583 = 119886119887radic1 minus 1205882120576 minus 1205892120576 (30)
It should be noted that the variation of the underlying powerdue to the 119870-distribution assumption now causes the pdf in(29) to have 119910119904119898 and 119910119889119898 dependencies
At the first stage of detection process Δ 1 = |119904119898| ge 119879denotes the event that the radar return of single range cellin the sum channel exceeds the detection threshold 1198970 =119879radic119864[|119888119904119898 + 119899119904119898|2 | 119910119904119898] denotes the detection threshold ofthe LRT normalized with respect to the conditional root-mean-squared sum channel clutter plus noise power Itshould be noted that the normalized values of 119871119898 and 1198970 alsohave a 119910119904119898 dependence under the119870-distribution assumptionThe resulting distribution conditioned on the occurrence ofevent Δ 1 is then obtained by integrating with respect tovariables 119905120576119898 and 119897119898 as follows
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898 Δ 1)= 1205832119875119889radic120587119861minus32
6 Mathematical Problems in Engineering
times radic1205872 [[[1 minus erf( 1198611198970120583radic(1 + 1205942))]]]
+ 1198611198970120583radic(1 + 1205942) exp[minus119861211989720(1 + 1205942) 1205832]
= 119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)119875119889
(31)
where 119861 = 1205832 + (119903120576119898 minus (119886119887)120588120576)2 erf(119911) = (2radic120587) int1199110 119890minus1199052119889119905 iserror function and 119875119889 = 119875|119904119898| ge 119879 | 119910119904119898 is the detectionprobability with the given 119910119904119898 during the first stage detection
Analogous to the effect on the detection performance thespatial correlation of clutter also affects angle measurementperformance of radar We assume that the spatial correlationof the difference channel clutter is the same as the one of thesum channel clutter In the spatially independent texture casethe value of 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1) is averaged over all
possible values of 119910119904119898 and 119910119889119898 to compute the conditionalpdf of MR error of single range cell return of target (denotedby 119901119877120576119898(119903120576119898 | Δ 1)) that is
119901119877120576119898 (119903120576119898 | Δ 1) = 11198751198891sdot intinfin0intinfin0119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)
sdot 119901 (119910119904119898 119910119889119898) 119889119910119904119898119889119910119889119898(32)
where 1198751198891 is the detection probability of the first stagedetector in the spatially independent texture case and is givenby (12) 119901(119910119904119898 119910119889119898) is the joint pdf of 119910119904119898 and 119910119889119898
It is assumed that119872 range cell returns have been detectedto determine the probable presence of a target in the localrange region [119895 119895 + 119875 minus 1) at the first stage of detectionprocessing Let 119901(119903120576 | 119872) denote the conditional pdf ofMR error when119872 range cell returns are used to extract theDOA of target It can be assumed that for each range cell119901119877120576119898|Δ 1(119903120576119898) is independent and obeys the distribution in(32) Denoting 119903120576_sum = sum119872119898=1 119903120576119898 and 119903120576 = 119903120576_sum119872 theconditional pdf of 119903120576_sum can be computed as [26]
119901sum (119903120576_sum | 119872) = 1199011198771205761 (1199031205761 | Δ 1) otimes 1199011198771205762 (1199031205762 | Δ 1) otimes sdot sdot sdot otimes 119901119877120576119872 (119903120576119872 | Δ 1) (33)
where otimes is convolution operation Thus we can obtain 119901(119903120576 |119872) = 119872119901sum(119872119903120576 | 119872) Additionally the probability of119872times occurrences of the event Δ 1 at the first stage detectionprocessing can be written as 119901119889119872 = 1198621198751198721198751198721198891 (1 minus 1198751198891)119875minus119872Then we can obtain that
119901 (119903120576119872) = 119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus119872 (34)
At the second stage of detection processing Δ 2 = 119872 ge119873 is denoted as the event of the target presence For theindependent texture case the pdf ofMR error under the eventΔ 2 can then be expressed as
119901119877120576|Δ 2 (119903120576) = 119901 (119903120576119872 ge 119873)119901119889 (119872 ge 119873)= sum119875119872=119873119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus1198721198751198631 (35)
where 1198751198631 is the overall detection probability in the spatiallyindependent texture case and is given by (13)
In the spatially correlated texture case the derivationprocess of the conditional pdf of MR error is similar tothat in the spatially independent texture case The analogousformulas with (33) (34) and (35) can be obtained by thesimple substitutions of 1198751198892 and 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1)for 1198751198891 and 119901119877120576119898(119903120576119898 | Δ 1) and they are denoted by 119901(119903120576 |119872 119910119904119898 119910119889119898) 119901(119903120576119872 | 119910119904119898 119910119889119898) and 119901(119903120576 | 119910119904119898 119910119889119898)They have 119910119904119898 and 119910119889119898 dependencies Therefore the overallconditional pdf of MR error for the spatially correlated
texture case is computed by averaging the MR errors over allpossible values of 119910119904119898 and 119910119889119898 that is
119901119877120576|Δ 2 (119903120576) = intinfin0intinfin0119901119877120576|Δ 2 (119903120576 | 119910119888119904 119910119888119889)
sdot 119901 (119910119888119904 119910119888119889 | Δ 2) 119889119910119888119904119889119910119888119889 = 11198751198632sdot intinfin0intinfin0
119875sum119872=119873
119862119875119872119901 (119903120576 | 119872 119910119888119904 119910119888119889)sdot 1198751198721198892 (1 minus 1198751198892)119875minus119872 119901 (119910119888119904 119910119888119889) 119889119910119888119904119889119910119888119889
(36)
where 1198751198892 and 1198751198632 are the first and second stage detectionprobabilities in the spatially correlated texture case and aregiven by (15) and (17) respectively
In the above analysis the joint pdf119901(119910119904119898 119910119889119898) is involvedThis pdf describes the distribution of the clutter texturesof the sum and difference channels within the same rangecell Generally the clutter returns in the sum and differencechannels are from the scattering of the common illuminatingsea surface region Hence the correlation of the texturecomponents of the sea clutter between the sum and differencechannels within the same range cell is also pronouncedMoreover because the directions of the sum and differencepatternmain lobes are not consistent and the clutter intensityis dominated by the antenna pattern gain the texture cor-relations are different for different range cells Herein twobounding situations (ie 119910119904119898 and 119910119889119898 are independent and
Mathematical Problems in Engineering 7
are completely correlated) are considered separately When119910119904119898 and 119910119889119898 are independent 119901(119910119904119898 119910119889119898) can be separatedand can be rewritten as 119901(119910119904119898 119910119889119898) = 119901(119910119904119898)119901(119910119889119898) When119910119904119898 and 119910119889119898 are completely correlated the values of 119910119904119898 and119910119889119898 within the same range cell are the same All involvingpdfs of monopulse angle measurement errors have only a 119910119904119898dependence Therefore the double integrals in (32) and (36)are reduced to the single integral
We wish to determine the error in an estimate of targetangle due to the clutter and noise Using (35) and (36) theconditional moments of 119903120576 are then given by
119864 [119903119899120576 | Δ 2] = intinfinminusinfin
119903119899120576119901119877120576|Δ 2 (119903120576) 119889119903120576 119899 = 1 2 (37)
For 119899 is equal to unity and two the first and second momentsof 119903120576 can be obtained by integrating (37) which are denotedas 119864[119903120576 | Δ 2] and 119864[1199032120576 | Δ 2] respectively Also the firstmoment is named the mean error (bias) Although each ofthe clutter and noise variables has a distribution with zeromean value the mean error is not zero and it cannot exceedthe width of the main lobe The square root of the secondmoment is named the RMSE and is denoted by Υ[119903120576 | Δ 2]In practice the RMSE is desired to measure the error and itis widely used to assess the performance for various kinds ofmeasurement results It is the combined effect of the meanerror and the STD from thismean errorThe conditional STDof 119903120576 is denoted as 120590[119903120576 | Δ 2] and it can be obtained from
1205902 [119903120576 | Δ 2] = 119864 [1199032120576 | Δ 2] minus (119864 [119903120576 | Δ 2])2 (38)
It is interesting to note that in theory this conditional STDof 119903120576 is infinite when the condition of Δ 2 is removed [1 10]In actual practice however the conversion from monopulseratio to angle is implemented as being within the main lobeand the target is also presumed to be within the main lobeThe conditional STD of 119903120576 is finite and its maximum possiblevalue is of the order of the beamwidth Consequently Υ[119903120576 |Δ 2] is also finite and its maximum possible value is of theorder of the beamwidth In our discussion Υ[119903120576 | Δ 2] isapplied to assess the performance of the angle measurementof wideband monopulse radar in clutter plus noise and 119864[119903120576 |Δ 2] and 120590[119903120576 | Δ 2] are applied to determine the maincontributions of the clutter and noise to angle error
4 Simulation Results and Analysis
41 Optimal Binary Detection Good detection performanceand angle measurement accuracy are two main goals ofwideband monopulse radar design Generally only whenthe target appears in the detected result the processingof monopulse angle measurement is carried out Hereinthe detection performance of the binary detector is firstlyanalyzed in the background of 119870-distributed sea clutter plusGaussian noise As in the researches [22 27] the optimalparameter settings are defined as the values of the binarydetector parameters which make the detector establish agiven detection probability at a given false alarm probabilitywith the least SCNR It is assumed that the parameter 119875 of
binary detector in our simulations is optimal According tothe results given in [22] it can be set to be equal to the targetradial length This optimal value of 119875 is denoted as 119875opt
The 119870-distributed sea clutters are generated by usingthe spherically invariant random process (SIRP) methodThe 20000 Monte Carlo experiments are conducted Inthe simulation the overall false alarm probability is set to10minus4 and the required detection thresholds of the LRT arecomputed theoretically by (10) and (11) for the spatiallyindependent texture case and by (14) and (16) for the spa-tially correlated texture case Those detection thresholds arethen used to obtain the theoretical and simulated detectionprobabilities The variations of theoretical and simulateddetection probabilitieswith different values of binary detectorparameter 119873 for two bounding cases are shown in Figure 1where 119873119868 and 119873119862 are denoted as the values of 119873 for thespatially independent texture case and the spatially correlatedtexture case respectively
From Figure 1 we first observe that the simulated detec-tion probability agrees well with the theoretical detectionprobability for both two cases This demonstrates that equa-tions (10)ndash(17) are correct Second we observe that for fixedvalues of V119888119904 in contrast with the spatially independent tex-ture case the detection probability of the spatially correlatedtexture case decreases However the deterioration degreedecreases with the increase of V119888119904 This can be explainedintuitively that the overall false alarm rate is dominated bya localized area of high clutter in the spatially correlatedtexture case but it is dominated by the occasional regionsof high clutter in the spatially independent texture caseConsequently in order to keep the same overall false alarmrate the fixed first threshold of the binary detector in thespatially correlated texture case is required to set a highervalue than that in the spatially independent texture caseNevertheless the bigger the values of V119888119904 are the closer arethe fixed first thresholds of two cases Thus the detectionprobabilities of the spatially correlated texture case are closeto those of the spatially independent texture case Similarresults were also obtained in [25]
As mentioned above the value of 119873 is chosen as theoptimal setting of the binary detector second threshold whenthe binary detector requires the least SCNR to establish agiven detection probability 119875119863 = 09 at a given false alarmprobability 119875119865 = 10minus4 Therefore we can see from Figure 1(a)that119873119868 = 4 is the optimal parameter setting for the spatiallyindependent texture case where V119888119904 = 1 However the valueof the optimal binary detector parameter is119873opt = 5 for thiscase by using the experiential formula in [22] The reason forthis is that our theoretical and simulated results are obtainedin the background of K-distributed sea clutter plus noisebut the experiential formula is derived in the background ofonly the K-distributed sea clutter Moreover in the practicalapplication the optimal parameter can be selected withina reasonable range In Figure 1(a) the performances of thebinary detectors of which the parameters are selected as119873119868 = 4 and 119873119868 = 5 respectively are very close when theirdetection probabilities satisfy 119875119889 gt 06 Thus it is acceptedthat 119873119868 = 5 is also the optimal parameter setting When
8 Mathematical Problems in Engineering
0 2 4 6 10 12 14 16800
01
02
03
04
05
06
07
08
09
10
Spatially correlated texture case
Spatially independenttexture case
Det
ectio
n pr
obab
ility
SCNR (dB)
Simulated NI = 3NC = 1Theoretical NI = 3NC = 1Simulated NI = 4NC = 2Th o et a I 4 N =
S u a e I 5 N =Th o et a I 5 N =S u a e I 6 N =Th o et a I 6 N =
(a)
Spatially independent texture case
Spatially correlated texture case
Simulated NI = 2NC = 1
Theoretical NI = 2NC = 1
Simulated NI = 3NC = 2
Theoretical NI = 3NC = 2
Simulated NI = 4NC = 3
Theoretical NI = 4NC = 3
Simulated NI = 5NC = 4
Theoretical NI = 5NC = 4
2 4 6 8 10 120SCNR (dB)
00
01
02
03
04
05
06
07
08
09
10
Det
ectio
n pr
obab
ility
(b)
Figure 1 Theoretical and simulated radar detection probabilities for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and CNR = 10 dB (black spatiallyindependent texture case gray spatially correlated texture case) (a) V119888119904 = 1 (b) V119888119904 = 25V119888119904 = 25 the optimal parameter setting is119873opt = 3 accordingto the experiential formula for the spatially independenttexture case We can see from Figure 1(b) that the detectionperformance of the detector is also optimal when 119873119868 =3 Similarly we can see from Figure 1 that 119873119862 = 2 and119873119862 = 3 are the optimal settings of the binary detector secondthreshold for both V119888119904 = 1 and V119888119904 = 25 in the spatiallycorrelated texture case It seems that these results are notconsistent with the known results in [27] This is because in[27] only the K-distributed sea clutter was considered
The above simulation demonstrates that the experien-tial formula given in [22] and the results given in [27]cannot be referred to in order to determinate the optimalparameter 119873opt of binary detector for the case that theradar returns include the 119870-distributed sea clutter and noisesimultaneously Although the spatial correlation of texturecomponents affects the value of optimal second thresholdsetting of the binary detector it should be noticed that forlarge clutter shape parameter the optimal parameter settingin the spatially correlated texture case is close to that in thespatially independent texture case Moreover the optimalparameter setting of 119873 in the spatially independent texturecase is also the suboptimal parameter setting in the spatiallycorrelated texture case for the small shape parameter suchas 119873119862 = 4 shown in Figure 1(a) Therefore in the followinginvestigation the optimal parameter setting is discussed onlyfor the spatially independent texture case
In Figure 2119873opt is plotted against CNR for different shapeparameters of sea clutter As we can see from these curves
= 1
= 4
= 12
= 16
= 8
789
101112131415161718
Nop
t
minus8 minus6 minus4 minus2 0 2 4 6 8minus10 12 14 16 18 2010CNR (dB)
Figure 2119873opt against CNR in different shape parameters for 1205902119899119904 =1 119875119891 = 10minus4 and 119875opt = 30119873opt is a monotonously nondecreasing function of CNR Foreach curve there are three CNR regions that is the lowCNR region (eg less than minus8 dB) the middle CNR region(eg from minus8 dB to 15 dB) and the high CNR region (eggreater than 15 dB) In the middle CNR region the value of119873opt increases with the increase of CNR for the same clutter
Mathematical Problems in Engineering 9
shape parameter This is because the proportion of the effectof clutter on detection performance increases as the CNRincreases In other two CNR regions the value of 119873opt isunrelated to the CNR In the low CNR region the effectof noise on detection performance is dominant and that ofclutter can be ignored So119873opt is a constant for all cases Onthe contrary in the high CNR region the effect of clutteron detection performance is dominant and that of noise canbe ignored Thus the optimal parameter of binary detectorcan be selected by using the experiential formula given in
[22] Based on above analysis the experiential formula canbe modified to guide the application of the binary detectorwhen target submerges in the K-distributed sea clutter plusnoise The modified experiential formula is given as follows
When CNR lt minus8 dB119873opt asymp round [027119875opt] (39)
When minus8 dB le CNR lt 15 dB
119873opt asymp round [(CNR + 8)23 065]minus025119875opt + (15 minus CNR)23 027119875opt] ] lt 10round [(CNR + 8)23 034119875opt + (15 minus CNR)23 027119875opt] ] ge 10 (40)
When CNR gt 15 dB119873opt asymp
round [065]minus025119875opt] ] lt 10round [034119875opt] ] ge 10 (41)
where round[sdot] denotes rounding operation It should bestated that under the constraint that the difference ofdetection performance is no more than 02 dB this modifiedexperiential formula can be applied for different119875opt and119873optcan be selected within some ranges so that this formula isnot unique In addition although this modified experientialformula is obtained under the condition that 119875119891 = 10minus4 and119875119863 = 09 it can be confirmed that the validity conditionsof this formula can be extended to 10minus4 ge 119875119865 ge 10minus10and 06 le 119875119863 le 095 according to the further numericalcalculation
42 Angle Measurement Performance In this section curvesof 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] and Υ[119903120576 | Δ 2] against relevantparameters are shown to analyze the angle measurementperformance with wideband monopulse radar Because theexact analytical formulas of 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] andΥ[119903120576 | Δ 2] cannot be derived all results in this sectionare obtained by numerical integration method It is assumedthat the angle measurements in the elevation and azimuthdirections can be regarded to be independent of each otherThus the patterns of the sum and difference channels ineither direction can be represented as two one-dimensionalpatterns A simulated monopulse antenna model is used toevaluate the performance of anglemeasurementThepatternsin the sum and difference channels can be represented as [13]
119892Σ (120579) = radic4120587120582 radic119882[ sin (ℎ (120579))ℎ (120579) ]119892Δ (120579) = radic4120587120582 radic3119882[ sin (ℎ (120579))ℎ (120579)2 minus cos (ℎ (120579))ℎ (120579) ] (42)
where ℎ(120579) = 120587(119882120582) sin(120579) 120582 is wavelength 119882 is thedimension of the antenna and 120579 is the deviation angle from
boresight We set 120582 = 8mm and 119882 = 322 cm Hence thebeamwidth is about 142 degrees It is worth pointing outthat in off-axis measurement the error of angle estimationin clutter increases as the deviation angle of off-axis targetincreases Nevertheless the results of the effect of clutter onthe angle estimation error can exhibit the similar behavior nomatter where the target locates in the main lobeThe analysisconclusion can be obtained from the results with a givendeviation angle Hence in our simulations the deviationangle of the off-axis target is set to 03 degrees
421 Effect of the Binary Detector Parameter 119873 The choiceof the binary detector parameter 119873 will affect not onlythe detection results but also the number of range cellsapplied to obtain the angle measurement Accordingly thedifferent values of the binary detector parameter119873will bringthe different angle measurement performances In Figure 3Υ[119903120576 | Δ 2] is plotted against SCNR of sum channel fordifferent values of 119873 Four different correlation cases areinvestigated It is assumed that in the simulation the cluttershape parameters of sum and difference channels are thesame
It can be observed from Figures 3(a) and 3(b) that in thespatially independent texture case the performance of anglemeasurement can be improved significantly by increasing thevalues of 119873 when SCNR is low yet its improvement slowsdown when SCNR is high Instead there are small differencesamong the performances of angle measurement for differentvalues of 119873 in the spatially correlated texture case Compar-ing Figures 3(c) and 3(d) to Figures 3(a) and 3(b) we see thatthe values of Υ[119903120576 | Δ 2] in the spatially correlated texturecase are higher than those in the spatially independent texturecase for the same SCNR and119873 This implies that an increasein spatial correlation of the texture components results in adegeneration of the angle measurement performance for thewideband monopulse radar On the other hand comparingFigures 3(b) and 3(d) to Figures 3(a) and 3(c) we do notsee the significant differences of Υ[119903120576 | Δ 2] for differentcorrelations of the clutter texture components between the
10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
where 120576119898 is the CMR error of single range cell By using 120578119898 asymp120578 120576119898 can be expressed as
120576119898 = 119889119898119904119898 minus 119889119898119904119898 asymp (119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)119904119898 + 119888119904119898 + 119899119904119898 (24)
The denominator in (24) is denoted as 119878119898 = 119904119898+119888119904119898+119899119904119898 andthe numerator is denoted as119863119898 = (119888119889119898 +119899119889119898) minus 120578(119888119904119898 +119899119904119898)Here119863119898 represents the error sources of angle measurementincluding the clutter and noise in both the sum and differencechannels Moreover the contribution of (119888119889119898 + 119899119889119898) to theerror is given by (119888119889119898 + 119899119889119898)(119904119898 + 119888119904119898 + 119899119889119898) and thecontribution of (119888119904119898 + 119899119904119898) to the error is given by 120578(119888s119898 +119899119904119898)(119904119898 + 119888119904119898 + 119899119889119898) The effect of the clutter plus noise ofsum channel is related to the location of target in the beamThen we can get 119864[119878119898] = 0 and 119864[119863119898] = 0 The conditionalvariances of 119878119898 and119863119898 can be represented as
119886 = radic12 (119864 [1003816100381610038161003816119863119898 minus 119864 [119863119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12 [11991021198891198981205902119888119889 + 1205902119899119889 + 1205782 (11991021199041198981205902119888119904 + 1205902119899119904) minus 21205881120578119910119904119898120590119888119904119910119889119898120590119888119889]
119887 = radic12 (119864 [1003816100381610038161003816119878119898 minus 119864 [119878119898]10038161003816100381610038162 | 119910119904119898 119910119889119898])= radic12119864 1003816100381610038161003816119904119898 + 119888119904119898 + 11989911990411989810038161003816100381610038162 = radic12 (1 + 1205942) (11991021199041198981205902119888119904 + 1205902119899119904)
(25)
where 1205881 is the real part of conditional correlation of clutterbetween the sum and the difference channels This condi-tional correlation can be represented as
1205851 = 1205881 + 1198951205891 = 119864 119888lowast119904119898119888119889119898 | 119910119904119898 119910119889119898radic119864 119888lowast119904119898119888119904119898 | 119910119904119898radic119864 119888lowast119889119898119888119889119898 | 119910119889119898= 119864 119910119904119898119910119889119898119909lowast119904119898119909119889119898 | 119910119904119898 119910119889119898119910119904119898119910119889119898120590119888119904120590119888119889 = 119864 119909lowast119904119898119909119889119898120590119888119904120590119888119889= 120585119909
(26)
where 1205891 is imaginary part of 1205851 1205881 and 1205891 are bounded by12058821 + 12058921 le 1 120585119909 is the correlation between the specklesof the sum and the difference channels The superscript lowastdenotes the conjugate operation From (26) we observe thatthe conditional correlation 1205851 is equivalent to the specklecorrelation 120585119909 Then the conditional correlation between 119878119898and119863119898 is given by
120585120576 = 119864 (119904119898 + 119888119904119898 + 119899119904119898)lowast [(119888119889119898 + 119899119889119898) minus 120578 (119888119904119898 + 119899119904119898)] | 119910119904119898 1199101198891198982119886119887 = 1199101199041198981205901198881199042119886119887 (1205881119910119889119898120590119888119889 minus 120578119910119904119898120590119888119904)+ 1198951199101199041198981199101198891198981205901198881199041205901198881198892119886119887 1205891 = 120588120576 + 119895120589120576 (27)
where 120588120576 and 120589120576 are the real and imaginary parts of 120585120576respectively and are bounded by 1205882120576 + 1205892120576 le 1 It should benoted that 120588120576 and 120589120576 have 119910119904119898 and 119910119889119898 dependencies but theyare constant in the Gaussian noise case
32 Exact Solution for Conditional pdf of MR Error Let usdefine
119871119898 = 10038161003816100381610038161199041198981003816100381610038161003816radic119864 [1003816100381610038161003816119888119904119898 + 11989911990411989810038161003816100381610038162 | 119910119904119898] (28)
Denote119876120576119898 = 119863119898119878119898 The CMR error 119902120576 can be representedby the terms of its real and imaginary parts namely 119902120576119898 =119903120576119898 + 119895119905120576119898 Thus the joint pdf of 119876120576119898 and 119871119898 can berepresented as follows [10]
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898) = 211989731198981205871205832 (1 + 1205942)2times exp(minus[ 1198972119898(1 + 1205942) + 1198972119898(1 + 1205942) 1205832 (119903120576119898 minus 119886119887120588120576)2+ 1198972119898(1 + 1205942) 1205832 (119905120576119898 minus 119886119887 120589120576)2])
(29)
where 1205942 120588120576 120589120576 119886 and 119887 are defined previously and
120583 = 119886119887radic1 minus 1205882120576 minus 1205892120576 (30)
It should be noted that the variation of the underlying powerdue to the 119870-distribution assumption now causes the pdf in(29) to have 119910119904119898 and 119910119889119898 dependencies
At the first stage of detection process Δ 1 = |119904119898| ge 119879denotes the event that the radar return of single range cellin the sum channel exceeds the detection threshold 1198970 =119879radic119864[|119888119904119898 + 119899119904119898|2 | 119910119904119898] denotes the detection threshold ofthe LRT normalized with respect to the conditional root-mean-squared sum channel clutter plus noise power Itshould be noted that the normalized values of 119871119898 and 1198970 alsohave a 119910119904119898 dependence under the119870-distribution assumptionThe resulting distribution conditioned on the occurrence ofevent Δ 1 is then obtained by integrating with respect tovariables 119905120576119898 and 119897119898 as follows
119901119877120576119898|Δ 1 (119903120576119898 | 119910119904119898 119910119889119898 Δ 1)= 1205832119875119889radic120587119861minus32
6 Mathematical Problems in Engineering
times radic1205872 [[[1 minus erf( 1198611198970120583radic(1 + 1205942))]]]
+ 1198611198970120583radic(1 + 1205942) exp[minus119861211989720(1 + 1205942) 1205832]
= 119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)119875119889
(31)
where 119861 = 1205832 + (119903120576119898 minus (119886119887)120588120576)2 erf(119911) = (2radic120587) int1199110 119890minus1199052119889119905 iserror function and 119875119889 = 119875|119904119898| ge 119879 | 119910119904119898 is the detectionprobability with the given 119910119904119898 during the first stage detection
Analogous to the effect on the detection performance thespatial correlation of clutter also affects angle measurementperformance of radar We assume that the spatial correlationof the difference channel clutter is the same as the one of thesum channel clutter In the spatially independent texture casethe value of 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1) is averaged over all
possible values of 119910119904119898 and 119910119889119898 to compute the conditionalpdf of MR error of single range cell return of target (denotedby 119901119877120576119898(119903120576119898 | Δ 1)) that is
119901119877120576119898 (119903120576119898 | Δ 1) = 11198751198891sdot intinfin0intinfin0119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)
sdot 119901 (119910119904119898 119910119889119898) 119889119910119904119898119889119910119889119898(32)
where 1198751198891 is the detection probability of the first stagedetector in the spatially independent texture case and is givenby (12) 119901(119910119904119898 119910119889119898) is the joint pdf of 119910119904119898 and 119910119889119898
It is assumed that119872 range cell returns have been detectedto determine the probable presence of a target in the localrange region [119895 119895 + 119875 minus 1) at the first stage of detectionprocessing Let 119901(119903120576 | 119872) denote the conditional pdf ofMR error when119872 range cell returns are used to extract theDOA of target It can be assumed that for each range cell119901119877120576119898|Δ 1(119903120576119898) is independent and obeys the distribution in(32) Denoting 119903120576_sum = sum119872119898=1 119903120576119898 and 119903120576 = 119903120576_sum119872 theconditional pdf of 119903120576_sum can be computed as [26]
119901sum (119903120576_sum | 119872) = 1199011198771205761 (1199031205761 | Δ 1) otimes 1199011198771205762 (1199031205762 | Δ 1) otimes sdot sdot sdot otimes 119901119877120576119872 (119903120576119872 | Δ 1) (33)
where otimes is convolution operation Thus we can obtain 119901(119903120576 |119872) = 119872119901sum(119872119903120576 | 119872) Additionally the probability of119872times occurrences of the event Δ 1 at the first stage detectionprocessing can be written as 119901119889119872 = 1198621198751198721198751198721198891 (1 minus 1198751198891)119875minus119872Then we can obtain that
119901 (119903120576119872) = 119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus119872 (34)
At the second stage of detection processing Δ 2 = 119872 ge119873 is denoted as the event of the target presence For theindependent texture case the pdf ofMR error under the eventΔ 2 can then be expressed as
119901119877120576|Δ 2 (119903120576) = 119901 (119903120576119872 ge 119873)119901119889 (119872 ge 119873)= sum119875119872=119873119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus1198721198751198631 (35)
where 1198751198631 is the overall detection probability in the spatiallyindependent texture case and is given by (13)
In the spatially correlated texture case the derivationprocess of the conditional pdf of MR error is similar tothat in the spatially independent texture case The analogousformulas with (33) (34) and (35) can be obtained by thesimple substitutions of 1198751198892 and 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1)for 1198751198891 and 119901119877120576119898(119903120576119898 | Δ 1) and they are denoted by 119901(119903120576 |119872 119910119904119898 119910119889119898) 119901(119903120576119872 | 119910119904119898 119910119889119898) and 119901(119903120576 | 119910119904119898 119910119889119898)They have 119910119904119898 and 119910119889119898 dependencies Therefore the overallconditional pdf of MR error for the spatially correlated
texture case is computed by averaging the MR errors over allpossible values of 119910119904119898 and 119910119889119898 that is
119901119877120576|Δ 2 (119903120576) = intinfin0intinfin0119901119877120576|Δ 2 (119903120576 | 119910119888119904 119910119888119889)
sdot 119901 (119910119888119904 119910119888119889 | Δ 2) 119889119910119888119904119889119910119888119889 = 11198751198632sdot intinfin0intinfin0
119875sum119872=119873
119862119875119872119901 (119903120576 | 119872 119910119888119904 119910119888119889)sdot 1198751198721198892 (1 minus 1198751198892)119875minus119872 119901 (119910119888119904 119910119888119889) 119889119910119888119904119889119910119888119889
(36)
where 1198751198892 and 1198751198632 are the first and second stage detectionprobabilities in the spatially correlated texture case and aregiven by (15) and (17) respectively
In the above analysis the joint pdf119901(119910119904119898 119910119889119898) is involvedThis pdf describes the distribution of the clutter texturesof the sum and difference channels within the same rangecell Generally the clutter returns in the sum and differencechannels are from the scattering of the common illuminatingsea surface region Hence the correlation of the texturecomponents of the sea clutter between the sum and differencechannels within the same range cell is also pronouncedMoreover because the directions of the sum and differencepatternmain lobes are not consistent and the clutter intensityis dominated by the antenna pattern gain the texture cor-relations are different for different range cells Herein twobounding situations (ie 119910119904119898 and 119910119889119898 are independent and
Mathematical Problems in Engineering 7
are completely correlated) are considered separately When119910119904119898 and 119910119889119898 are independent 119901(119910119904119898 119910119889119898) can be separatedand can be rewritten as 119901(119910119904119898 119910119889119898) = 119901(119910119904119898)119901(119910119889119898) When119910119904119898 and 119910119889119898 are completely correlated the values of 119910119904119898 and119910119889119898 within the same range cell are the same All involvingpdfs of monopulse angle measurement errors have only a 119910119904119898dependence Therefore the double integrals in (32) and (36)are reduced to the single integral
We wish to determine the error in an estimate of targetangle due to the clutter and noise Using (35) and (36) theconditional moments of 119903120576 are then given by
119864 [119903119899120576 | Δ 2] = intinfinminusinfin
119903119899120576119901119877120576|Δ 2 (119903120576) 119889119903120576 119899 = 1 2 (37)
For 119899 is equal to unity and two the first and second momentsof 119903120576 can be obtained by integrating (37) which are denotedas 119864[119903120576 | Δ 2] and 119864[1199032120576 | Δ 2] respectively Also the firstmoment is named the mean error (bias) Although each ofthe clutter and noise variables has a distribution with zeromean value the mean error is not zero and it cannot exceedthe width of the main lobe The square root of the secondmoment is named the RMSE and is denoted by Υ[119903120576 | Δ 2]In practice the RMSE is desired to measure the error and itis widely used to assess the performance for various kinds ofmeasurement results It is the combined effect of the meanerror and the STD from thismean errorThe conditional STDof 119903120576 is denoted as 120590[119903120576 | Δ 2] and it can be obtained from
1205902 [119903120576 | Δ 2] = 119864 [1199032120576 | Δ 2] minus (119864 [119903120576 | Δ 2])2 (38)
It is interesting to note that in theory this conditional STDof 119903120576 is infinite when the condition of Δ 2 is removed [1 10]In actual practice however the conversion from monopulseratio to angle is implemented as being within the main lobeand the target is also presumed to be within the main lobeThe conditional STD of 119903120576 is finite and its maximum possiblevalue is of the order of the beamwidth Consequently Υ[119903120576 |Δ 2] is also finite and its maximum possible value is of theorder of the beamwidth In our discussion Υ[119903120576 | Δ 2] isapplied to assess the performance of the angle measurementof wideband monopulse radar in clutter plus noise and 119864[119903120576 |Δ 2] and 120590[119903120576 | Δ 2] are applied to determine the maincontributions of the clutter and noise to angle error
4 Simulation Results and Analysis
41 Optimal Binary Detection Good detection performanceand angle measurement accuracy are two main goals ofwideband monopulse radar design Generally only whenthe target appears in the detected result the processingof monopulse angle measurement is carried out Hereinthe detection performance of the binary detector is firstlyanalyzed in the background of 119870-distributed sea clutter plusGaussian noise As in the researches [22 27] the optimalparameter settings are defined as the values of the binarydetector parameters which make the detector establish agiven detection probability at a given false alarm probabilitywith the least SCNR It is assumed that the parameter 119875 of
binary detector in our simulations is optimal According tothe results given in [22] it can be set to be equal to the targetradial length This optimal value of 119875 is denoted as 119875opt
The 119870-distributed sea clutters are generated by usingthe spherically invariant random process (SIRP) methodThe 20000 Monte Carlo experiments are conducted Inthe simulation the overall false alarm probability is set to10minus4 and the required detection thresholds of the LRT arecomputed theoretically by (10) and (11) for the spatiallyindependent texture case and by (14) and (16) for the spa-tially correlated texture case Those detection thresholds arethen used to obtain the theoretical and simulated detectionprobabilities The variations of theoretical and simulateddetection probabilitieswith different values of binary detectorparameter 119873 for two bounding cases are shown in Figure 1where 119873119868 and 119873119862 are denoted as the values of 119873 for thespatially independent texture case and the spatially correlatedtexture case respectively
From Figure 1 we first observe that the simulated detec-tion probability agrees well with the theoretical detectionprobability for both two cases This demonstrates that equa-tions (10)ndash(17) are correct Second we observe that for fixedvalues of V119888119904 in contrast with the spatially independent tex-ture case the detection probability of the spatially correlatedtexture case decreases However the deterioration degreedecreases with the increase of V119888119904 This can be explainedintuitively that the overall false alarm rate is dominated bya localized area of high clutter in the spatially correlatedtexture case but it is dominated by the occasional regionsof high clutter in the spatially independent texture caseConsequently in order to keep the same overall false alarmrate the fixed first threshold of the binary detector in thespatially correlated texture case is required to set a highervalue than that in the spatially independent texture caseNevertheless the bigger the values of V119888119904 are the closer arethe fixed first thresholds of two cases Thus the detectionprobabilities of the spatially correlated texture case are closeto those of the spatially independent texture case Similarresults were also obtained in [25]
As mentioned above the value of 119873 is chosen as theoptimal setting of the binary detector second threshold whenthe binary detector requires the least SCNR to establish agiven detection probability 119875119863 = 09 at a given false alarmprobability 119875119865 = 10minus4 Therefore we can see from Figure 1(a)that119873119868 = 4 is the optimal parameter setting for the spatiallyindependent texture case where V119888119904 = 1 However the valueof the optimal binary detector parameter is119873opt = 5 for thiscase by using the experiential formula in [22] The reason forthis is that our theoretical and simulated results are obtainedin the background of K-distributed sea clutter plus noisebut the experiential formula is derived in the background ofonly the K-distributed sea clutter Moreover in the practicalapplication the optimal parameter can be selected withina reasonable range In Figure 1(a) the performances of thebinary detectors of which the parameters are selected as119873119868 = 4 and 119873119868 = 5 respectively are very close when theirdetection probabilities satisfy 119875119889 gt 06 Thus it is acceptedthat 119873119868 = 5 is also the optimal parameter setting When
8 Mathematical Problems in Engineering
0 2 4 6 10 12 14 16800
01
02
03
04
05
06
07
08
09
10
Spatially correlated texture case
Spatially independenttexture case
Det
ectio
n pr
obab
ility
SCNR (dB)
Simulated NI = 3NC = 1Theoretical NI = 3NC = 1Simulated NI = 4NC = 2Th o et a I 4 N =
S u a e I 5 N =Th o et a I 5 N =S u a e I 6 N =Th o et a I 6 N =
(a)
Spatially independent texture case
Spatially correlated texture case
Simulated NI = 2NC = 1
Theoretical NI = 2NC = 1
Simulated NI = 3NC = 2
Theoretical NI = 3NC = 2
Simulated NI = 4NC = 3
Theoretical NI = 4NC = 3
Simulated NI = 5NC = 4
Theoretical NI = 5NC = 4
2 4 6 8 10 120SCNR (dB)
00
01
02
03
04
05
06
07
08
09
10
Det
ectio
n pr
obab
ility
(b)
Figure 1 Theoretical and simulated radar detection probabilities for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and CNR = 10 dB (black spatiallyindependent texture case gray spatially correlated texture case) (a) V119888119904 = 1 (b) V119888119904 = 25V119888119904 = 25 the optimal parameter setting is119873opt = 3 accordingto the experiential formula for the spatially independenttexture case We can see from Figure 1(b) that the detectionperformance of the detector is also optimal when 119873119868 =3 Similarly we can see from Figure 1 that 119873119862 = 2 and119873119862 = 3 are the optimal settings of the binary detector secondthreshold for both V119888119904 = 1 and V119888119904 = 25 in the spatiallycorrelated texture case It seems that these results are notconsistent with the known results in [27] This is because in[27] only the K-distributed sea clutter was considered
The above simulation demonstrates that the experien-tial formula given in [22] and the results given in [27]cannot be referred to in order to determinate the optimalparameter 119873opt of binary detector for the case that theradar returns include the 119870-distributed sea clutter and noisesimultaneously Although the spatial correlation of texturecomponents affects the value of optimal second thresholdsetting of the binary detector it should be noticed that forlarge clutter shape parameter the optimal parameter settingin the spatially correlated texture case is close to that in thespatially independent texture case Moreover the optimalparameter setting of 119873 in the spatially independent texturecase is also the suboptimal parameter setting in the spatiallycorrelated texture case for the small shape parameter suchas 119873119862 = 4 shown in Figure 1(a) Therefore in the followinginvestigation the optimal parameter setting is discussed onlyfor the spatially independent texture case
In Figure 2119873opt is plotted against CNR for different shapeparameters of sea clutter As we can see from these curves
= 1
= 4
= 12
= 16
= 8
789
101112131415161718
Nop
t
minus8 minus6 minus4 minus2 0 2 4 6 8minus10 12 14 16 18 2010CNR (dB)
Figure 2119873opt against CNR in different shape parameters for 1205902119899119904 =1 119875119891 = 10minus4 and 119875opt = 30119873opt is a monotonously nondecreasing function of CNR Foreach curve there are three CNR regions that is the lowCNR region (eg less than minus8 dB) the middle CNR region(eg from minus8 dB to 15 dB) and the high CNR region (eggreater than 15 dB) In the middle CNR region the value of119873opt increases with the increase of CNR for the same clutter
Mathematical Problems in Engineering 9
shape parameter This is because the proportion of the effectof clutter on detection performance increases as the CNRincreases In other two CNR regions the value of 119873opt isunrelated to the CNR In the low CNR region the effectof noise on detection performance is dominant and that ofclutter can be ignored So119873opt is a constant for all cases Onthe contrary in the high CNR region the effect of clutteron detection performance is dominant and that of noise canbe ignored Thus the optimal parameter of binary detectorcan be selected by using the experiential formula given in
[22] Based on above analysis the experiential formula canbe modified to guide the application of the binary detectorwhen target submerges in the K-distributed sea clutter plusnoise The modified experiential formula is given as follows
When CNR lt minus8 dB119873opt asymp round [027119875opt] (39)
When minus8 dB le CNR lt 15 dB
119873opt asymp round [(CNR + 8)23 065]minus025119875opt + (15 minus CNR)23 027119875opt] ] lt 10round [(CNR + 8)23 034119875opt + (15 minus CNR)23 027119875opt] ] ge 10 (40)
When CNR gt 15 dB119873opt asymp
round [065]minus025119875opt] ] lt 10round [034119875opt] ] ge 10 (41)
where round[sdot] denotes rounding operation It should bestated that under the constraint that the difference ofdetection performance is no more than 02 dB this modifiedexperiential formula can be applied for different119875opt and119873optcan be selected within some ranges so that this formula isnot unique In addition although this modified experientialformula is obtained under the condition that 119875119891 = 10minus4 and119875119863 = 09 it can be confirmed that the validity conditionsof this formula can be extended to 10minus4 ge 119875119865 ge 10minus10and 06 le 119875119863 le 095 according to the further numericalcalculation
42 Angle Measurement Performance In this section curvesof 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] and Υ[119903120576 | Δ 2] against relevantparameters are shown to analyze the angle measurementperformance with wideband monopulse radar Because theexact analytical formulas of 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] andΥ[119903120576 | Δ 2] cannot be derived all results in this sectionare obtained by numerical integration method It is assumedthat the angle measurements in the elevation and azimuthdirections can be regarded to be independent of each otherThus the patterns of the sum and difference channels ineither direction can be represented as two one-dimensionalpatterns A simulated monopulse antenna model is used toevaluate the performance of anglemeasurementThepatternsin the sum and difference channels can be represented as [13]
119892Σ (120579) = radic4120587120582 radic119882[ sin (ℎ (120579))ℎ (120579) ]119892Δ (120579) = radic4120587120582 radic3119882[ sin (ℎ (120579))ℎ (120579)2 minus cos (ℎ (120579))ℎ (120579) ] (42)
where ℎ(120579) = 120587(119882120582) sin(120579) 120582 is wavelength 119882 is thedimension of the antenna and 120579 is the deviation angle from
boresight We set 120582 = 8mm and 119882 = 322 cm Hence thebeamwidth is about 142 degrees It is worth pointing outthat in off-axis measurement the error of angle estimationin clutter increases as the deviation angle of off-axis targetincreases Nevertheless the results of the effect of clutter onthe angle estimation error can exhibit the similar behavior nomatter where the target locates in the main lobeThe analysisconclusion can be obtained from the results with a givendeviation angle Hence in our simulations the deviationangle of the off-axis target is set to 03 degrees
421 Effect of the Binary Detector Parameter 119873 The choiceof the binary detector parameter 119873 will affect not onlythe detection results but also the number of range cellsapplied to obtain the angle measurement Accordingly thedifferent values of the binary detector parameter119873will bringthe different angle measurement performances In Figure 3Υ[119903120576 | Δ 2] is plotted against SCNR of sum channel fordifferent values of 119873 Four different correlation cases areinvestigated It is assumed that in the simulation the cluttershape parameters of sum and difference channels are thesame
It can be observed from Figures 3(a) and 3(b) that in thespatially independent texture case the performance of anglemeasurement can be improved significantly by increasing thevalues of 119873 when SCNR is low yet its improvement slowsdown when SCNR is high Instead there are small differencesamong the performances of angle measurement for differentvalues of 119873 in the spatially correlated texture case Compar-ing Figures 3(c) and 3(d) to Figures 3(a) and 3(b) we see thatthe values of Υ[119903120576 | Δ 2] in the spatially correlated texturecase are higher than those in the spatially independent texturecase for the same SCNR and119873 This implies that an increasein spatial correlation of the texture components results in adegeneration of the angle measurement performance for thewideband monopulse radar On the other hand comparingFigures 3(b) and 3(d) to Figures 3(a) and 3(c) we do notsee the significant differences of Υ[119903120576 | Δ 2] for differentcorrelations of the clutter texture components between the
10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
times radic1205872 [[[1 minus erf( 1198611198970120583radic(1 + 1205942))]]]
+ 1198611198970120583radic(1 + 1205942) exp[minus119861211989720(1 + 1205942) 1205832]
= 119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)119875119889
(31)
where 119861 = 1205832 + (119903120576119898 minus (119886119887)120588120576)2 erf(119911) = (2radic120587) int1199110 119890minus1199052119889119905 iserror function and 119875119889 = 119875|119904119898| ge 119879 | 119910119904119898 is the detectionprobability with the given 119910119904119898 during the first stage detection
Analogous to the effect on the detection performance thespatial correlation of clutter also affects angle measurementperformance of radar We assume that the spatial correlationof the difference channel clutter is the same as the one of thesum channel clutter In the spatially independent texture casethe value of 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1) is averaged over all
possible values of 119910119904119898 and 119910119889119898 to compute the conditionalpdf of MR error of single range cell return of target (denotedby 119901119877120576119898(119903120576119898 | Δ 1)) that is
119901119877120576119898 (119903120576119898 | Δ 1) = 11198751198891sdot intinfin0intinfin0119901119877120576119898 (119903120576119898 Δ 1 | 119910119904119898 119910119889119898)
sdot 119901 (119910119904119898 119910119889119898) 119889119910119904119898119889119910119889119898(32)
where 1198751198891 is the detection probability of the first stagedetector in the spatially independent texture case and is givenby (12) 119901(119910119904119898 119910119889119898) is the joint pdf of 119910119904119898 and 119910119889119898
It is assumed that119872 range cell returns have been detectedto determine the probable presence of a target in the localrange region [119895 119895 + 119875 minus 1) at the first stage of detectionprocessing Let 119901(119903120576 | 119872) denote the conditional pdf ofMR error when119872 range cell returns are used to extract theDOA of target It can be assumed that for each range cell119901119877120576119898|Δ 1(119903120576119898) is independent and obeys the distribution in(32) Denoting 119903120576_sum = sum119872119898=1 119903120576119898 and 119903120576 = 119903120576_sum119872 theconditional pdf of 119903120576_sum can be computed as [26]
119901sum (119903120576_sum | 119872) = 1199011198771205761 (1199031205761 | Δ 1) otimes 1199011198771205762 (1199031205762 | Δ 1) otimes sdot sdot sdot otimes 119901119877120576119872 (119903120576119872 | Δ 1) (33)
where otimes is convolution operation Thus we can obtain 119901(119903120576 |119872) = 119872119901sum(119872119903120576 | 119872) Additionally the probability of119872times occurrences of the event Δ 1 at the first stage detectionprocessing can be written as 119901119889119872 = 1198621198751198721198751198721198891 (1 minus 1198751198891)119875minus119872Then we can obtain that
119901 (119903120576119872) = 119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus119872 (34)
At the second stage of detection processing Δ 2 = 119872 ge119873 is denoted as the event of the target presence For theindependent texture case the pdf ofMR error under the eventΔ 2 can then be expressed as
119901119877120576|Δ 2 (119903120576) = 119901 (119903120576119872 ge 119873)119901119889 (119872 ge 119873)= sum119875119872=119873119862119875119872119901 (119903120576 | 119872)1198751198721198891 (1 minus 1198751198891)119875minus1198721198751198631 (35)
where 1198751198631 is the overall detection probability in the spatiallyindependent texture case and is given by (13)
In the spatially correlated texture case the derivationprocess of the conditional pdf of MR error is similar tothat in the spatially independent texture case The analogousformulas with (33) (34) and (35) can be obtained by thesimple substitutions of 1198751198892 and 119901119877120576119898|Δ 1(119903120576119898 | 119910119904119898 119910119889119898 Δ 1)for 1198751198891 and 119901119877120576119898(119903120576119898 | Δ 1) and they are denoted by 119901(119903120576 |119872 119910119904119898 119910119889119898) 119901(119903120576119872 | 119910119904119898 119910119889119898) and 119901(119903120576 | 119910119904119898 119910119889119898)They have 119910119904119898 and 119910119889119898 dependencies Therefore the overallconditional pdf of MR error for the spatially correlated
texture case is computed by averaging the MR errors over allpossible values of 119910119904119898 and 119910119889119898 that is
119901119877120576|Δ 2 (119903120576) = intinfin0intinfin0119901119877120576|Δ 2 (119903120576 | 119910119888119904 119910119888119889)
sdot 119901 (119910119888119904 119910119888119889 | Δ 2) 119889119910119888119904119889119910119888119889 = 11198751198632sdot intinfin0intinfin0
119875sum119872=119873
119862119875119872119901 (119903120576 | 119872 119910119888119904 119910119888119889)sdot 1198751198721198892 (1 minus 1198751198892)119875minus119872 119901 (119910119888119904 119910119888119889) 119889119910119888119904119889119910119888119889
(36)
where 1198751198892 and 1198751198632 are the first and second stage detectionprobabilities in the spatially correlated texture case and aregiven by (15) and (17) respectively
In the above analysis the joint pdf119901(119910119904119898 119910119889119898) is involvedThis pdf describes the distribution of the clutter texturesof the sum and difference channels within the same rangecell Generally the clutter returns in the sum and differencechannels are from the scattering of the common illuminatingsea surface region Hence the correlation of the texturecomponents of the sea clutter between the sum and differencechannels within the same range cell is also pronouncedMoreover because the directions of the sum and differencepatternmain lobes are not consistent and the clutter intensityis dominated by the antenna pattern gain the texture cor-relations are different for different range cells Herein twobounding situations (ie 119910119904119898 and 119910119889119898 are independent and
Mathematical Problems in Engineering 7
are completely correlated) are considered separately When119910119904119898 and 119910119889119898 are independent 119901(119910119904119898 119910119889119898) can be separatedand can be rewritten as 119901(119910119904119898 119910119889119898) = 119901(119910119904119898)119901(119910119889119898) When119910119904119898 and 119910119889119898 are completely correlated the values of 119910119904119898 and119910119889119898 within the same range cell are the same All involvingpdfs of monopulse angle measurement errors have only a 119910119904119898dependence Therefore the double integrals in (32) and (36)are reduced to the single integral
We wish to determine the error in an estimate of targetangle due to the clutter and noise Using (35) and (36) theconditional moments of 119903120576 are then given by
119864 [119903119899120576 | Δ 2] = intinfinminusinfin
119903119899120576119901119877120576|Δ 2 (119903120576) 119889119903120576 119899 = 1 2 (37)
For 119899 is equal to unity and two the first and second momentsof 119903120576 can be obtained by integrating (37) which are denotedas 119864[119903120576 | Δ 2] and 119864[1199032120576 | Δ 2] respectively Also the firstmoment is named the mean error (bias) Although each ofthe clutter and noise variables has a distribution with zeromean value the mean error is not zero and it cannot exceedthe width of the main lobe The square root of the secondmoment is named the RMSE and is denoted by Υ[119903120576 | Δ 2]In practice the RMSE is desired to measure the error and itis widely used to assess the performance for various kinds ofmeasurement results It is the combined effect of the meanerror and the STD from thismean errorThe conditional STDof 119903120576 is denoted as 120590[119903120576 | Δ 2] and it can be obtained from
1205902 [119903120576 | Δ 2] = 119864 [1199032120576 | Δ 2] minus (119864 [119903120576 | Δ 2])2 (38)
It is interesting to note that in theory this conditional STDof 119903120576 is infinite when the condition of Δ 2 is removed [1 10]In actual practice however the conversion from monopulseratio to angle is implemented as being within the main lobeand the target is also presumed to be within the main lobeThe conditional STD of 119903120576 is finite and its maximum possiblevalue is of the order of the beamwidth Consequently Υ[119903120576 |Δ 2] is also finite and its maximum possible value is of theorder of the beamwidth In our discussion Υ[119903120576 | Δ 2] isapplied to assess the performance of the angle measurementof wideband monopulse radar in clutter plus noise and 119864[119903120576 |Δ 2] and 120590[119903120576 | Δ 2] are applied to determine the maincontributions of the clutter and noise to angle error
4 Simulation Results and Analysis
41 Optimal Binary Detection Good detection performanceand angle measurement accuracy are two main goals ofwideband monopulse radar design Generally only whenthe target appears in the detected result the processingof monopulse angle measurement is carried out Hereinthe detection performance of the binary detector is firstlyanalyzed in the background of 119870-distributed sea clutter plusGaussian noise As in the researches [22 27] the optimalparameter settings are defined as the values of the binarydetector parameters which make the detector establish agiven detection probability at a given false alarm probabilitywith the least SCNR It is assumed that the parameter 119875 of
binary detector in our simulations is optimal According tothe results given in [22] it can be set to be equal to the targetradial length This optimal value of 119875 is denoted as 119875opt
The 119870-distributed sea clutters are generated by usingthe spherically invariant random process (SIRP) methodThe 20000 Monte Carlo experiments are conducted Inthe simulation the overall false alarm probability is set to10minus4 and the required detection thresholds of the LRT arecomputed theoretically by (10) and (11) for the spatiallyindependent texture case and by (14) and (16) for the spa-tially correlated texture case Those detection thresholds arethen used to obtain the theoretical and simulated detectionprobabilities The variations of theoretical and simulateddetection probabilitieswith different values of binary detectorparameter 119873 for two bounding cases are shown in Figure 1where 119873119868 and 119873119862 are denoted as the values of 119873 for thespatially independent texture case and the spatially correlatedtexture case respectively
From Figure 1 we first observe that the simulated detec-tion probability agrees well with the theoretical detectionprobability for both two cases This demonstrates that equa-tions (10)ndash(17) are correct Second we observe that for fixedvalues of V119888119904 in contrast with the spatially independent tex-ture case the detection probability of the spatially correlatedtexture case decreases However the deterioration degreedecreases with the increase of V119888119904 This can be explainedintuitively that the overall false alarm rate is dominated bya localized area of high clutter in the spatially correlatedtexture case but it is dominated by the occasional regionsof high clutter in the spatially independent texture caseConsequently in order to keep the same overall false alarmrate the fixed first threshold of the binary detector in thespatially correlated texture case is required to set a highervalue than that in the spatially independent texture caseNevertheless the bigger the values of V119888119904 are the closer arethe fixed first thresholds of two cases Thus the detectionprobabilities of the spatially correlated texture case are closeto those of the spatially independent texture case Similarresults were also obtained in [25]
As mentioned above the value of 119873 is chosen as theoptimal setting of the binary detector second threshold whenthe binary detector requires the least SCNR to establish agiven detection probability 119875119863 = 09 at a given false alarmprobability 119875119865 = 10minus4 Therefore we can see from Figure 1(a)that119873119868 = 4 is the optimal parameter setting for the spatiallyindependent texture case where V119888119904 = 1 However the valueof the optimal binary detector parameter is119873opt = 5 for thiscase by using the experiential formula in [22] The reason forthis is that our theoretical and simulated results are obtainedin the background of K-distributed sea clutter plus noisebut the experiential formula is derived in the background ofonly the K-distributed sea clutter Moreover in the practicalapplication the optimal parameter can be selected withina reasonable range In Figure 1(a) the performances of thebinary detectors of which the parameters are selected as119873119868 = 4 and 119873119868 = 5 respectively are very close when theirdetection probabilities satisfy 119875119889 gt 06 Thus it is acceptedthat 119873119868 = 5 is also the optimal parameter setting When
8 Mathematical Problems in Engineering
0 2 4 6 10 12 14 16800
01
02
03
04
05
06
07
08
09
10
Spatially correlated texture case
Spatially independenttexture case
Det
ectio
n pr
obab
ility
SCNR (dB)
Simulated NI = 3NC = 1Theoretical NI = 3NC = 1Simulated NI = 4NC = 2Th o et a I 4 N =
S u a e I 5 N =Th o et a I 5 N =S u a e I 6 N =Th o et a I 6 N =
(a)
Spatially independent texture case
Spatially correlated texture case
Simulated NI = 2NC = 1
Theoretical NI = 2NC = 1
Simulated NI = 3NC = 2
Theoretical NI = 3NC = 2
Simulated NI = 4NC = 3
Theoretical NI = 4NC = 3
Simulated NI = 5NC = 4
Theoretical NI = 5NC = 4
2 4 6 8 10 120SCNR (dB)
00
01
02
03
04
05
06
07
08
09
10
Det
ectio
n pr
obab
ility
(b)
Figure 1 Theoretical and simulated radar detection probabilities for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and CNR = 10 dB (black spatiallyindependent texture case gray spatially correlated texture case) (a) V119888119904 = 1 (b) V119888119904 = 25V119888119904 = 25 the optimal parameter setting is119873opt = 3 accordingto the experiential formula for the spatially independenttexture case We can see from Figure 1(b) that the detectionperformance of the detector is also optimal when 119873119868 =3 Similarly we can see from Figure 1 that 119873119862 = 2 and119873119862 = 3 are the optimal settings of the binary detector secondthreshold for both V119888119904 = 1 and V119888119904 = 25 in the spatiallycorrelated texture case It seems that these results are notconsistent with the known results in [27] This is because in[27] only the K-distributed sea clutter was considered
The above simulation demonstrates that the experien-tial formula given in [22] and the results given in [27]cannot be referred to in order to determinate the optimalparameter 119873opt of binary detector for the case that theradar returns include the 119870-distributed sea clutter and noisesimultaneously Although the spatial correlation of texturecomponents affects the value of optimal second thresholdsetting of the binary detector it should be noticed that forlarge clutter shape parameter the optimal parameter settingin the spatially correlated texture case is close to that in thespatially independent texture case Moreover the optimalparameter setting of 119873 in the spatially independent texturecase is also the suboptimal parameter setting in the spatiallycorrelated texture case for the small shape parameter suchas 119873119862 = 4 shown in Figure 1(a) Therefore in the followinginvestigation the optimal parameter setting is discussed onlyfor the spatially independent texture case
In Figure 2119873opt is plotted against CNR for different shapeparameters of sea clutter As we can see from these curves
= 1
= 4
= 12
= 16
= 8
789
101112131415161718
Nop
t
minus8 minus6 minus4 minus2 0 2 4 6 8minus10 12 14 16 18 2010CNR (dB)
Figure 2119873opt against CNR in different shape parameters for 1205902119899119904 =1 119875119891 = 10minus4 and 119875opt = 30119873opt is a monotonously nondecreasing function of CNR Foreach curve there are three CNR regions that is the lowCNR region (eg less than minus8 dB) the middle CNR region(eg from minus8 dB to 15 dB) and the high CNR region (eggreater than 15 dB) In the middle CNR region the value of119873opt increases with the increase of CNR for the same clutter
Mathematical Problems in Engineering 9
shape parameter This is because the proportion of the effectof clutter on detection performance increases as the CNRincreases In other two CNR regions the value of 119873opt isunrelated to the CNR In the low CNR region the effectof noise on detection performance is dominant and that ofclutter can be ignored So119873opt is a constant for all cases Onthe contrary in the high CNR region the effect of clutteron detection performance is dominant and that of noise canbe ignored Thus the optimal parameter of binary detectorcan be selected by using the experiential formula given in
[22] Based on above analysis the experiential formula canbe modified to guide the application of the binary detectorwhen target submerges in the K-distributed sea clutter plusnoise The modified experiential formula is given as follows
When CNR lt minus8 dB119873opt asymp round [027119875opt] (39)
When minus8 dB le CNR lt 15 dB
119873opt asymp round [(CNR + 8)23 065]minus025119875opt + (15 minus CNR)23 027119875opt] ] lt 10round [(CNR + 8)23 034119875opt + (15 minus CNR)23 027119875opt] ] ge 10 (40)
When CNR gt 15 dB119873opt asymp
round [065]minus025119875opt] ] lt 10round [034119875opt] ] ge 10 (41)
where round[sdot] denotes rounding operation It should bestated that under the constraint that the difference ofdetection performance is no more than 02 dB this modifiedexperiential formula can be applied for different119875opt and119873optcan be selected within some ranges so that this formula isnot unique In addition although this modified experientialformula is obtained under the condition that 119875119891 = 10minus4 and119875119863 = 09 it can be confirmed that the validity conditionsof this formula can be extended to 10minus4 ge 119875119865 ge 10minus10and 06 le 119875119863 le 095 according to the further numericalcalculation
42 Angle Measurement Performance In this section curvesof 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] and Υ[119903120576 | Δ 2] against relevantparameters are shown to analyze the angle measurementperformance with wideband monopulse radar Because theexact analytical formulas of 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] andΥ[119903120576 | Δ 2] cannot be derived all results in this sectionare obtained by numerical integration method It is assumedthat the angle measurements in the elevation and azimuthdirections can be regarded to be independent of each otherThus the patterns of the sum and difference channels ineither direction can be represented as two one-dimensionalpatterns A simulated monopulse antenna model is used toevaluate the performance of anglemeasurementThepatternsin the sum and difference channels can be represented as [13]
119892Σ (120579) = radic4120587120582 radic119882[ sin (ℎ (120579))ℎ (120579) ]119892Δ (120579) = radic4120587120582 radic3119882[ sin (ℎ (120579))ℎ (120579)2 minus cos (ℎ (120579))ℎ (120579) ] (42)
where ℎ(120579) = 120587(119882120582) sin(120579) 120582 is wavelength 119882 is thedimension of the antenna and 120579 is the deviation angle from
boresight We set 120582 = 8mm and 119882 = 322 cm Hence thebeamwidth is about 142 degrees It is worth pointing outthat in off-axis measurement the error of angle estimationin clutter increases as the deviation angle of off-axis targetincreases Nevertheless the results of the effect of clutter onthe angle estimation error can exhibit the similar behavior nomatter where the target locates in the main lobeThe analysisconclusion can be obtained from the results with a givendeviation angle Hence in our simulations the deviationangle of the off-axis target is set to 03 degrees
421 Effect of the Binary Detector Parameter 119873 The choiceof the binary detector parameter 119873 will affect not onlythe detection results but also the number of range cellsapplied to obtain the angle measurement Accordingly thedifferent values of the binary detector parameter119873will bringthe different angle measurement performances In Figure 3Υ[119903120576 | Δ 2] is plotted against SCNR of sum channel fordifferent values of 119873 Four different correlation cases areinvestigated It is assumed that in the simulation the cluttershape parameters of sum and difference channels are thesame
It can be observed from Figures 3(a) and 3(b) that in thespatially independent texture case the performance of anglemeasurement can be improved significantly by increasing thevalues of 119873 when SCNR is low yet its improvement slowsdown when SCNR is high Instead there are small differencesamong the performances of angle measurement for differentvalues of 119873 in the spatially correlated texture case Compar-ing Figures 3(c) and 3(d) to Figures 3(a) and 3(b) we see thatthe values of Υ[119903120576 | Δ 2] in the spatially correlated texturecase are higher than those in the spatially independent texturecase for the same SCNR and119873 This implies that an increasein spatial correlation of the texture components results in adegeneration of the angle measurement performance for thewideband monopulse radar On the other hand comparingFigures 3(b) and 3(d) to Figures 3(a) and 3(c) we do notsee the significant differences of Υ[119903120576 | Δ 2] for differentcorrelations of the clutter texture components between the
10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
are completely correlated) are considered separately When119910119904119898 and 119910119889119898 are independent 119901(119910119904119898 119910119889119898) can be separatedand can be rewritten as 119901(119910119904119898 119910119889119898) = 119901(119910119904119898)119901(119910119889119898) When119910119904119898 and 119910119889119898 are completely correlated the values of 119910119904119898 and119910119889119898 within the same range cell are the same All involvingpdfs of monopulse angle measurement errors have only a 119910119904119898dependence Therefore the double integrals in (32) and (36)are reduced to the single integral
We wish to determine the error in an estimate of targetangle due to the clutter and noise Using (35) and (36) theconditional moments of 119903120576 are then given by
119864 [119903119899120576 | Δ 2] = intinfinminusinfin
119903119899120576119901119877120576|Δ 2 (119903120576) 119889119903120576 119899 = 1 2 (37)
For 119899 is equal to unity and two the first and second momentsof 119903120576 can be obtained by integrating (37) which are denotedas 119864[119903120576 | Δ 2] and 119864[1199032120576 | Δ 2] respectively Also the firstmoment is named the mean error (bias) Although each ofthe clutter and noise variables has a distribution with zeromean value the mean error is not zero and it cannot exceedthe width of the main lobe The square root of the secondmoment is named the RMSE and is denoted by Υ[119903120576 | Δ 2]In practice the RMSE is desired to measure the error and itis widely used to assess the performance for various kinds ofmeasurement results It is the combined effect of the meanerror and the STD from thismean errorThe conditional STDof 119903120576 is denoted as 120590[119903120576 | Δ 2] and it can be obtained from
1205902 [119903120576 | Δ 2] = 119864 [1199032120576 | Δ 2] minus (119864 [119903120576 | Δ 2])2 (38)
It is interesting to note that in theory this conditional STDof 119903120576 is infinite when the condition of Δ 2 is removed [1 10]In actual practice however the conversion from monopulseratio to angle is implemented as being within the main lobeand the target is also presumed to be within the main lobeThe conditional STD of 119903120576 is finite and its maximum possiblevalue is of the order of the beamwidth Consequently Υ[119903120576 |Δ 2] is also finite and its maximum possible value is of theorder of the beamwidth In our discussion Υ[119903120576 | Δ 2] isapplied to assess the performance of the angle measurementof wideband monopulse radar in clutter plus noise and 119864[119903120576 |Δ 2] and 120590[119903120576 | Δ 2] are applied to determine the maincontributions of the clutter and noise to angle error
4 Simulation Results and Analysis
41 Optimal Binary Detection Good detection performanceand angle measurement accuracy are two main goals ofwideband monopulse radar design Generally only whenthe target appears in the detected result the processingof monopulse angle measurement is carried out Hereinthe detection performance of the binary detector is firstlyanalyzed in the background of 119870-distributed sea clutter plusGaussian noise As in the researches [22 27] the optimalparameter settings are defined as the values of the binarydetector parameters which make the detector establish agiven detection probability at a given false alarm probabilitywith the least SCNR It is assumed that the parameter 119875 of
binary detector in our simulations is optimal According tothe results given in [22] it can be set to be equal to the targetradial length This optimal value of 119875 is denoted as 119875opt
The 119870-distributed sea clutters are generated by usingthe spherically invariant random process (SIRP) methodThe 20000 Monte Carlo experiments are conducted Inthe simulation the overall false alarm probability is set to10minus4 and the required detection thresholds of the LRT arecomputed theoretically by (10) and (11) for the spatiallyindependent texture case and by (14) and (16) for the spa-tially correlated texture case Those detection thresholds arethen used to obtain the theoretical and simulated detectionprobabilities The variations of theoretical and simulateddetection probabilitieswith different values of binary detectorparameter 119873 for two bounding cases are shown in Figure 1where 119873119868 and 119873119862 are denoted as the values of 119873 for thespatially independent texture case and the spatially correlatedtexture case respectively
From Figure 1 we first observe that the simulated detec-tion probability agrees well with the theoretical detectionprobability for both two cases This demonstrates that equa-tions (10)ndash(17) are correct Second we observe that for fixedvalues of V119888119904 in contrast with the spatially independent tex-ture case the detection probability of the spatially correlatedtexture case decreases However the deterioration degreedecreases with the increase of V119888119904 This can be explainedintuitively that the overall false alarm rate is dominated bya localized area of high clutter in the spatially correlatedtexture case but it is dominated by the occasional regionsof high clutter in the spatially independent texture caseConsequently in order to keep the same overall false alarmrate the fixed first threshold of the binary detector in thespatially correlated texture case is required to set a highervalue than that in the spatially independent texture caseNevertheless the bigger the values of V119888119904 are the closer arethe fixed first thresholds of two cases Thus the detectionprobabilities of the spatially correlated texture case are closeto those of the spatially independent texture case Similarresults were also obtained in [25]
As mentioned above the value of 119873 is chosen as theoptimal setting of the binary detector second threshold whenthe binary detector requires the least SCNR to establish agiven detection probability 119875119863 = 09 at a given false alarmprobability 119875119865 = 10minus4 Therefore we can see from Figure 1(a)that119873119868 = 4 is the optimal parameter setting for the spatiallyindependent texture case where V119888119904 = 1 However the valueof the optimal binary detector parameter is119873opt = 5 for thiscase by using the experiential formula in [22] The reason forthis is that our theoretical and simulated results are obtainedin the background of K-distributed sea clutter plus noisebut the experiential formula is derived in the background ofonly the K-distributed sea clutter Moreover in the practicalapplication the optimal parameter can be selected withina reasonable range In Figure 1(a) the performances of thebinary detectors of which the parameters are selected as119873119868 = 4 and 119873119868 = 5 respectively are very close when theirdetection probabilities satisfy 119875119889 gt 06 Thus it is acceptedthat 119873119868 = 5 is also the optimal parameter setting When
8 Mathematical Problems in Engineering
0 2 4 6 10 12 14 16800
01
02
03
04
05
06
07
08
09
10
Spatially correlated texture case
Spatially independenttexture case
Det
ectio
n pr
obab
ility
SCNR (dB)
Simulated NI = 3NC = 1Theoretical NI = 3NC = 1Simulated NI = 4NC = 2Th o et a I 4 N =
S u a e I 5 N =Th o et a I 5 N =S u a e I 6 N =Th o et a I 6 N =
(a)
Spatially independent texture case
Spatially correlated texture case
Simulated NI = 2NC = 1
Theoretical NI = 2NC = 1
Simulated NI = 3NC = 2
Theoretical NI = 3NC = 2
Simulated NI = 4NC = 3
Theoretical NI = 4NC = 3
Simulated NI = 5NC = 4
Theoretical NI = 5NC = 4
2 4 6 8 10 120SCNR (dB)
00
01
02
03
04
05
06
07
08
09
10
Det
ectio
n pr
obab
ility
(b)
Figure 1 Theoretical and simulated radar detection probabilities for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and CNR = 10 dB (black spatiallyindependent texture case gray spatially correlated texture case) (a) V119888119904 = 1 (b) V119888119904 = 25V119888119904 = 25 the optimal parameter setting is119873opt = 3 accordingto the experiential formula for the spatially independenttexture case We can see from Figure 1(b) that the detectionperformance of the detector is also optimal when 119873119868 =3 Similarly we can see from Figure 1 that 119873119862 = 2 and119873119862 = 3 are the optimal settings of the binary detector secondthreshold for both V119888119904 = 1 and V119888119904 = 25 in the spatiallycorrelated texture case It seems that these results are notconsistent with the known results in [27] This is because in[27] only the K-distributed sea clutter was considered
The above simulation demonstrates that the experien-tial formula given in [22] and the results given in [27]cannot be referred to in order to determinate the optimalparameter 119873opt of binary detector for the case that theradar returns include the 119870-distributed sea clutter and noisesimultaneously Although the spatial correlation of texturecomponents affects the value of optimal second thresholdsetting of the binary detector it should be noticed that forlarge clutter shape parameter the optimal parameter settingin the spatially correlated texture case is close to that in thespatially independent texture case Moreover the optimalparameter setting of 119873 in the spatially independent texturecase is also the suboptimal parameter setting in the spatiallycorrelated texture case for the small shape parameter suchas 119873119862 = 4 shown in Figure 1(a) Therefore in the followinginvestigation the optimal parameter setting is discussed onlyfor the spatially independent texture case
In Figure 2119873opt is plotted against CNR for different shapeparameters of sea clutter As we can see from these curves
= 1
= 4
= 12
= 16
= 8
789
101112131415161718
Nop
t
minus8 minus6 minus4 minus2 0 2 4 6 8minus10 12 14 16 18 2010CNR (dB)
Figure 2119873opt against CNR in different shape parameters for 1205902119899119904 =1 119875119891 = 10minus4 and 119875opt = 30119873opt is a monotonously nondecreasing function of CNR Foreach curve there are three CNR regions that is the lowCNR region (eg less than minus8 dB) the middle CNR region(eg from minus8 dB to 15 dB) and the high CNR region (eggreater than 15 dB) In the middle CNR region the value of119873opt increases with the increase of CNR for the same clutter
Mathematical Problems in Engineering 9
shape parameter This is because the proportion of the effectof clutter on detection performance increases as the CNRincreases In other two CNR regions the value of 119873opt isunrelated to the CNR In the low CNR region the effectof noise on detection performance is dominant and that ofclutter can be ignored So119873opt is a constant for all cases Onthe contrary in the high CNR region the effect of clutteron detection performance is dominant and that of noise canbe ignored Thus the optimal parameter of binary detectorcan be selected by using the experiential formula given in
[22] Based on above analysis the experiential formula canbe modified to guide the application of the binary detectorwhen target submerges in the K-distributed sea clutter plusnoise The modified experiential formula is given as follows
When CNR lt minus8 dB119873opt asymp round [027119875opt] (39)
When minus8 dB le CNR lt 15 dB
119873opt asymp round [(CNR + 8)23 065]minus025119875opt + (15 minus CNR)23 027119875opt] ] lt 10round [(CNR + 8)23 034119875opt + (15 minus CNR)23 027119875opt] ] ge 10 (40)
When CNR gt 15 dB119873opt asymp
round [065]minus025119875opt] ] lt 10round [034119875opt] ] ge 10 (41)
where round[sdot] denotes rounding operation It should bestated that under the constraint that the difference ofdetection performance is no more than 02 dB this modifiedexperiential formula can be applied for different119875opt and119873optcan be selected within some ranges so that this formula isnot unique In addition although this modified experientialformula is obtained under the condition that 119875119891 = 10minus4 and119875119863 = 09 it can be confirmed that the validity conditionsof this formula can be extended to 10minus4 ge 119875119865 ge 10minus10and 06 le 119875119863 le 095 according to the further numericalcalculation
42 Angle Measurement Performance In this section curvesof 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] and Υ[119903120576 | Δ 2] against relevantparameters are shown to analyze the angle measurementperformance with wideband monopulse radar Because theexact analytical formulas of 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] andΥ[119903120576 | Δ 2] cannot be derived all results in this sectionare obtained by numerical integration method It is assumedthat the angle measurements in the elevation and azimuthdirections can be regarded to be independent of each otherThus the patterns of the sum and difference channels ineither direction can be represented as two one-dimensionalpatterns A simulated monopulse antenna model is used toevaluate the performance of anglemeasurementThepatternsin the sum and difference channels can be represented as [13]
119892Σ (120579) = radic4120587120582 radic119882[ sin (ℎ (120579))ℎ (120579) ]119892Δ (120579) = radic4120587120582 radic3119882[ sin (ℎ (120579))ℎ (120579)2 minus cos (ℎ (120579))ℎ (120579) ] (42)
where ℎ(120579) = 120587(119882120582) sin(120579) 120582 is wavelength 119882 is thedimension of the antenna and 120579 is the deviation angle from
boresight We set 120582 = 8mm and 119882 = 322 cm Hence thebeamwidth is about 142 degrees It is worth pointing outthat in off-axis measurement the error of angle estimationin clutter increases as the deviation angle of off-axis targetincreases Nevertheless the results of the effect of clutter onthe angle estimation error can exhibit the similar behavior nomatter where the target locates in the main lobeThe analysisconclusion can be obtained from the results with a givendeviation angle Hence in our simulations the deviationangle of the off-axis target is set to 03 degrees
421 Effect of the Binary Detector Parameter 119873 The choiceof the binary detector parameter 119873 will affect not onlythe detection results but also the number of range cellsapplied to obtain the angle measurement Accordingly thedifferent values of the binary detector parameter119873will bringthe different angle measurement performances In Figure 3Υ[119903120576 | Δ 2] is plotted against SCNR of sum channel fordifferent values of 119873 Four different correlation cases areinvestigated It is assumed that in the simulation the cluttershape parameters of sum and difference channels are thesame
It can be observed from Figures 3(a) and 3(b) that in thespatially independent texture case the performance of anglemeasurement can be improved significantly by increasing thevalues of 119873 when SCNR is low yet its improvement slowsdown when SCNR is high Instead there are small differencesamong the performances of angle measurement for differentvalues of 119873 in the spatially correlated texture case Compar-ing Figures 3(c) and 3(d) to Figures 3(a) and 3(b) we see thatthe values of Υ[119903120576 | Δ 2] in the spatially correlated texturecase are higher than those in the spatially independent texturecase for the same SCNR and119873 This implies that an increasein spatial correlation of the texture components results in adegeneration of the angle measurement performance for thewideband monopulse radar On the other hand comparingFigures 3(b) and 3(d) to Figures 3(a) and 3(c) we do notsee the significant differences of Υ[119903120576 | Δ 2] for differentcorrelations of the clutter texture components between the
10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
0 2 4 6 10 12 14 16800
01
02
03
04
05
06
07
08
09
10
Spatially correlated texture case
Spatially independenttexture case
Det
ectio
n pr
obab
ility
SCNR (dB)
Simulated NI = 3NC = 1Theoretical NI = 3NC = 1Simulated NI = 4NC = 2Th o et a I 4 N =
S u a e I 5 N =Th o et a I 5 N =S u a e I 6 N =Th o et a I 6 N =
(a)
Spatially independent texture case
Spatially correlated texture case
Simulated NI = 2NC = 1
Theoretical NI = 2NC = 1
Simulated NI = 3NC = 2
Theoretical NI = 3NC = 2
Simulated NI = 4NC = 3
Theoretical NI = 4NC = 3
Simulated NI = 5NC = 4
Theoretical NI = 5NC = 4
2 4 6 8 10 120SCNR (dB)
00
01
02
03
04
05
06
07
08
09
10
Det
ectio
n pr
obab
ility
(b)
Figure 1 Theoretical and simulated radar detection probabilities for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and CNR = 10 dB (black spatiallyindependent texture case gray spatially correlated texture case) (a) V119888119904 = 1 (b) V119888119904 = 25V119888119904 = 25 the optimal parameter setting is119873opt = 3 accordingto the experiential formula for the spatially independenttexture case We can see from Figure 1(b) that the detectionperformance of the detector is also optimal when 119873119868 =3 Similarly we can see from Figure 1 that 119873119862 = 2 and119873119862 = 3 are the optimal settings of the binary detector secondthreshold for both V119888119904 = 1 and V119888119904 = 25 in the spatiallycorrelated texture case It seems that these results are notconsistent with the known results in [27] This is because in[27] only the K-distributed sea clutter was considered
The above simulation demonstrates that the experien-tial formula given in [22] and the results given in [27]cannot be referred to in order to determinate the optimalparameter 119873opt of binary detector for the case that theradar returns include the 119870-distributed sea clutter and noisesimultaneously Although the spatial correlation of texturecomponents affects the value of optimal second thresholdsetting of the binary detector it should be noticed that forlarge clutter shape parameter the optimal parameter settingin the spatially correlated texture case is close to that in thespatially independent texture case Moreover the optimalparameter setting of 119873 in the spatially independent texturecase is also the suboptimal parameter setting in the spatiallycorrelated texture case for the small shape parameter suchas 119873119862 = 4 shown in Figure 1(a) Therefore in the followinginvestigation the optimal parameter setting is discussed onlyfor the spatially independent texture case
In Figure 2119873opt is plotted against CNR for different shapeparameters of sea clutter As we can see from these curves
= 1
= 4
= 12
= 16
= 8
789
101112131415161718
Nop
t
minus8 minus6 minus4 minus2 0 2 4 6 8minus10 12 14 16 18 2010CNR (dB)
Figure 2119873opt against CNR in different shape parameters for 1205902119899119904 =1 119875119891 = 10minus4 and 119875opt = 30119873opt is a monotonously nondecreasing function of CNR Foreach curve there are three CNR regions that is the lowCNR region (eg less than minus8 dB) the middle CNR region(eg from minus8 dB to 15 dB) and the high CNR region (eggreater than 15 dB) In the middle CNR region the value of119873opt increases with the increase of CNR for the same clutter
Mathematical Problems in Engineering 9
shape parameter This is because the proportion of the effectof clutter on detection performance increases as the CNRincreases In other two CNR regions the value of 119873opt isunrelated to the CNR In the low CNR region the effectof noise on detection performance is dominant and that ofclutter can be ignored So119873opt is a constant for all cases Onthe contrary in the high CNR region the effect of clutteron detection performance is dominant and that of noise canbe ignored Thus the optimal parameter of binary detectorcan be selected by using the experiential formula given in
[22] Based on above analysis the experiential formula canbe modified to guide the application of the binary detectorwhen target submerges in the K-distributed sea clutter plusnoise The modified experiential formula is given as follows
When CNR lt minus8 dB119873opt asymp round [027119875opt] (39)
When minus8 dB le CNR lt 15 dB
119873opt asymp round [(CNR + 8)23 065]minus025119875opt + (15 minus CNR)23 027119875opt] ] lt 10round [(CNR + 8)23 034119875opt + (15 minus CNR)23 027119875opt] ] ge 10 (40)
When CNR gt 15 dB119873opt asymp
round [065]minus025119875opt] ] lt 10round [034119875opt] ] ge 10 (41)
where round[sdot] denotes rounding operation It should bestated that under the constraint that the difference ofdetection performance is no more than 02 dB this modifiedexperiential formula can be applied for different119875opt and119873optcan be selected within some ranges so that this formula isnot unique In addition although this modified experientialformula is obtained under the condition that 119875119891 = 10minus4 and119875119863 = 09 it can be confirmed that the validity conditionsof this formula can be extended to 10minus4 ge 119875119865 ge 10minus10and 06 le 119875119863 le 095 according to the further numericalcalculation
42 Angle Measurement Performance In this section curvesof 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] and Υ[119903120576 | Δ 2] against relevantparameters are shown to analyze the angle measurementperformance with wideband monopulse radar Because theexact analytical formulas of 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] andΥ[119903120576 | Δ 2] cannot be derived all results in this sectionare obtained by numerical integration method It is assumedthat the angle measurements in the elevation and azimuthdirections can be regarded to be independent of each otherThus the patterns of the sum and difference channels ineither direction can be represented as two one-dimensionalpatterns A simulated monopulse antenna model is used toevaluate the performance of anglemeasurementThepatternsin the sum and difference channels can be represented as [13]
119892Σ (120579) = radic4120587120582 radic119882[ sin (ℎ (120579))ℎ (120579) ]119892Δ (120579) = radic4120587120582 radic3119882[ sin (ℎ (120579))ℎ (120579)2 minus cos (ℎ (120579))ℎ (120579) ] (42)
where ℎ(120579) = 120587(119882120582) sin(120579) 120582 is wavelength 119882 is thedimension of the antenna and 120579 is the deviation angle from
boresight We set 120582 = 8mm and 119882 = 322 cm Hence thebeamwidth is about 142 degrees It is worth pointing outthat in off-axis measurement the error of angle estimationin clutter increases as the deviation angle of off-axis targetincreases Nevertheless the results of the effect of clutter onthe angle estimation error can exhibit the similar behavior nomatter where the target locates in the main lobeThe analysisconclusion can be obtained from the results with a givendeviation angle Hence in our simulations the deviationangle of the off-axis target is set to 03 degrees
421 Effect of the Binary Detector Parameter 119873 The choiceof the binary detector parameter 119873 will affect not onlythe detection results but also the number of range cellsapplied to obtain the angle measurement Accordingly thedifferent values of the binary detector parameter119873will bringthe different angle measurement performances In Figure 3Υ[119903120576 | Δ 2] is plotted against SCNR of sum channel fordifferent values of 119873 Four different correlation cases areinvestigated It is assumed that in the simulation the cluttershape parameters of sum and difference channels are thesame
It can be observed from Figures 3(a) and 3(b) that in thespatially independent texture case the performance of anglemeasurement can be improved significantly by increasing thevalues of 119873 when SCNR is low yet its improvement slowsdown when SCNR is high Instead there are small differencesamong the performances of angle measurement for differentvalues of 119873 in the spatially correlated texture case Compar-ing Figures 3(c) and 3(d) to Figures 3(a) and 3(b) we see thatthe values of Υ[119903120576 | Δ 2] in the spatially correlated texturecase are higher than those in the spatially independent texturecase for the same SCNR and119873 This implies that an increasein spatial correlation of the texture components results in adegeneration of the angle measurement performance for thewideband monopulse radar On the other hand comparingFigures 3(b) and 3(d) to Figures 3(a) and 3(c) we do notsee the significant differences of Υ[119903120576 | Δ 2] for differentcorrelations of the clutter texture components between the
10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
shape parameter This is because the proportion of the effectof clutter on detection performance increases as the CNRincreases In other two CNR regions the value of 119873opt isunrelated to the CNR In the low CNR region the effectof noise on detection performance is dominant and that ofclutter can be ignored So119873opt is a constant for all cases Onthe contrary in the high CNR region the effect of clutteron detection performance is dominant and that of noise canbe ignored Thus the optimal parameter of binary detectorcan be selected by using the experiential formula given in
[22] Based on above analysis the experiential formula canbe modified to guide the application of the binary detectorwhen target submerges in the K-distributed sea clutter plusnoise The modified experiential formula is given as follows
When CNR lt minus8 dB119873opt asymp round [027119875opt] (39)
When minus8 dB le CNR lt 15 dB
119873opt asymp round [(CNR + 8)23 065]minus025119875opt + (15 minus CNR)23 027119875opt] ] lt 10round [(CNR + 8)23 034119875opt + (15 minus CNR)23 027119875opt] ] ge 10 (40)
When CNR gt 15 dB119873opt asymp
round [065]minus025119875opt] ] lt 10round [034119875opt] ] ge 10 (41)
where round[sdot] denotes rounding operation It should bestated that under the constraint that the difference ofdetection performance is no more than 02 dB this modifiedexperiential formula can be applied for different119875opt and119873optcan be selected within some ranges so that this formula isnot unique In addition although this modified experientialformula is obtained under the condition that 119875119891 = 10minus4 and119875119863 = 09 it can be confirmed that the validity conditionsof this formula can be extended to 10minus4 ge 119875119865 ge 10minus10and 06 le 119875119863 le 095 according to the further numericalcalculation
42 Angle Measurement Performance In this section curvesof 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] and Υ[119903120576 | Δ 2] against relevantparameters are shown to analyze the angle measurementperformance with wideband monopulse radar Because theexact analytical formulas of 119864[119903120576 | Δ 2] 120590[119903120576 | Δ 2] andΥ[119903120576 | Δ 2] cannot be derived all results in this sectionare obtained by numerical integration method It is assumedthat the angle measurements in the elevation and azimuthdirections can be regarded to be independent of each otherThus the patterns of the sum and difference channels ineither direction can be represented as two one-dimensionalpatterns A simulated monopulse antenna model is used toevaluate the performance of anglemeasurementThepatternsin the sum and difference channels can be represented as [13]
119892Σ (120579) = radic4120587120582 radic119882[ sin (ℎ (120579))ℎ (120579) ]119892Δ (120579) = radic4120587120582 radic3119882[ sin (ℎ (120579))ℎ (120579)2 minus cos (ℎ (120579))ℎ (120579) ] (42)
where ℎ(120579) = 120587(119882120582) sin(120579) 120582 is wavelength 119882 is thedimension of the antenna and 120579 is the deviation angle from
boresight We set 120582 = 8mm and 119882 = 322 cm Hence thebeamwidth is about 142 degrees It is worth pointing outthat in off-axis measurement the error of angle estimationin clutter increases as the deviation angle of off-axis targetincreases Nevertheless the results of the effect of clutter onthe angle estimation error can exhibit the similar behavior nomatter where the target locates in the main lobeThe analysisconclusion can be obtained from the results with a givendeviation angle Hence in our simulations the deviationangle of the off-axis target is set to 03 degrees
421 Effect of the Binary Detector Parameter 119873 The choiceof the binary detector parameter 119873 will affect not onlythe detection results but also the number of range cellsapplied to obtain the angle measurement Accordingly thedifferent values of the binary detector parameter119873will bringthe different angle measurement performances In Figure 3Υ[119903120576 | Δ 2] is plotted against SCNR of sum channel fordifferent values of 119873 Four different correlation cases areinvestigated It is assumed that in the simulation the cluttershape parameters of sum and difference channels are thesame
It can be observed from Figures 3(a) and 3(b) that in thespatially independent texture case the performance of anglemeasurement can be improved significantly by increasing thevalues of 119873 when SCNR is low yet its improvement slowsdown when SCNR is high Instead there are small differencesamong the performances of angle measurement for differentvalues of 119873 in the spatially correlated texture case Compar-ing Figures 3(c) and 3(d) to Figures 3(a) and 3(b) we see thatthe values of Υ[119903120576 | Δ 2] in the spatially correlated texturecase are higher than those in the spatially independent texturecase for the same SCNR and119873 This implies that an increasein spatial correlation of the texture components results in adegeneration of the angle measurement performance for thewideband monopulse radar On the other hand comparingFigures 3(b) and 3(d) to Figures 3(a) and 3(c) we do notsee the significant differences of Υ[119903120576 | Δ 2] for differentcorrelations of the clutter texture components between the
10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(a)
SCNR weighting
Uniform weighting
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
005
010
015
020
025
(b)
N = 2
N = 4
N = 5
N = 7
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
N = 2
N = 4
N = 5
N = 7
000
005
010
015
020
025훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 3 Conditional RMSE of MR in different values of119873 for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and differencechannels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b) Spatially independenttexture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent (d) Spatially correlatedtexture case 119910119904119898 and 119910119889119898 are completely correlated
sum and difference channelsThis indicates that the effects ofthe correlation of the clutter texture components between thesum and difference channels on the angle measurement arevery weak and can be ignored According to the above resultsin order to ensure the optimal radar detection performanceandminimize the error ofmonopulse anglemeasurement wecan deduce a principle the maximum among all values of119873whichmake the binary detector achieve the optimal detectionperformance can be regarded as the optimal parametersetting
Figure 4 shows the results of 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]for different values of 119873 when the texture is independent inrange and 119910119904119898 and 119910119889119898 are independent It can be seen inFigure 4(a) that the absolute value of 119864[119903120576 | Δ 2] decreases
as the value of 119873 increases and for different values of 119873the differences among the curves of 119864[119903120576 | Δ 2] decreaseas the SCNR increases However in Figure 4(b) the valueof 120590[119903120576 | Δ 2] increases as the value of 119873 increases in thehigh SCNR region For different values of 119873 the differencesamong the curves of 120590[119903120576 | Δ 2] are small and decreaseslowly as the SCNR increases In addition we can obtain bycomparing Figures 3(a) and 4(a) that the value of Υ[119903120576 | Δ 2]approximates to the absolute value of 119864[119903120576 | Δ 2] in the lowSCNR region (eg less than 9 dB) Similarly we can obtain bycomparing Figures 3(a) and 4(b) that the value of Υ[119903120576 | Δ 2]approximates to the value of 120590[119903120576 | Δ 2] in the high SCNRregion (eg greater than 9 dB) These phenomena indicatethat the main source of the error in monopulse measurement
Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
minus025
minus020
minus015
minus010
minus005
000
Uniform weighting
SCNR weighting
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(a)
000
001
002
003
004
005
006
007
SCNR weighting
Uniform weighting
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
N = 2
N = 4
N = 5
N = 7
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(b)
Figure 4 Conditional mean and conditional STD of MR error in different values of 119873 when the texture is independent in range and 119910119904119898and 119910119889119898 are independent for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 120579 = 03 and V = 1 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
is the absolute bias for low SCNR and the standard deviationfor high SCNR respectively Consequently in Figure 3(a)Υ[119903120576 | Δ 2] decreases as the value of 119873 increases in the lowSCNR region and increases in the high SCNR region
The power weighting scheme is widely applied to estimatethe angle from119873 independent samples [28] In Figures 3(a)3(b) and 4 the results ofΥ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2]with respect to the powerweighting scheme are also displayedto compare with those with respect to uniform weightingschemes Visual inspection of these results demonstratesthat the power weighting scheme can provide better anglemeasurement than the uniform weighting scheme in oursimulation Nevertheless for these two weighting schemesthere are not very large differences in the angle measurementerrors and both the improvements of angle measurementperformance with the increase of SCNR and the changesof angle measurement performance with the variation of119873 show the similar tendencies This means that either ofweighting schemes is used to analyze the effect of the clutterplus noise on angle measurement of wideband monopulseradar the same conclusion can be obtained Therefore inorder to simplify the analysis it can be accepted that theuniform weighting scheme is adopted in our analysis andsimulation
422 Effect of the Shape Parameter of Sea Clutter It is wellknown that the shape parameter of sea clutter affects thedetection performance of radar Similarly it also affects theangle measurement performance It is necessary to developthe corresponding analysis to investigate this effect In Fig-ure 5 the results of Υ[119903120576 | Δ 2] are plotted against the SCNRof sum channel for different clutter shape parameters in fourdifferent correlation cases and in Figure 6 the results of119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are plotted against the SCNR of
sum channel for different clutter shape parameters in the casewhere the texture is independent in range and119910119904119898 and119910119889119898 areindependent In each simulation the value of119873opt is selectedaccording to the above principle of the optimal parametersetting
Figure 5 shows that for low SCNR of sum channel theangle measurement performance of wideband monopulseradar degrades with the decrease of the clutter shape param-eter The reason is that the clutter has a longer tail for thesmaller shape parameter hence the target-like sea spike mayhave much higher power which can cause the bigger biasbetween themeasurement and real anglesThis phenomenoncan also be observed clearly in Figure 6(a) In addition inFigure 5 Υ[119903120576 | Δ 2] decreases significantly as V increasesfrom 05 to 5 and decreases a little as V increases from 5 to20 This indicates that improvement of angle measurementperformance slows down as V increases In Figures 5(a) and6(b) we can see that both Υ[119903120576 | Δ 2] and 120590[119903120576 | Δ 2]do not decrease as V increases in the high SCNR regionThe reason is that 119873opt decreases as V increases but 120590[119903120576 |Δ 2] decreases with the decrease of 119873opt In the high SCNRregion the decreasing degree of 120590[119903120576 | Δ 2] is greater than itsincreasing degree and 120590[119903120576 | Δ 2] is the main error sourceof angle measurement However for different clutter shapeparameters there are not tremendous differences among thevalues of 120590[119903120576 | Δ 2]
In Figures 5(a) and 5(c) it should be noticed that aslong as the shape parameters of sum channel clutter are thesame all results are very close for different clutter shapeparameters of difference channelHence in the preceding andfollowing simulations it is acceptable assumption that theclutter shape parameters of sum and difference channels arethe same In addition the comparisons of Figures 5(a) and5(b) with Figures 5(c) and 5(d) indicate that for the same
12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
cs = 05 cd = 05
cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
000
004
008
012
016
020
024
(a)
cs = 05
cs = 1
cs = 5
cs = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R
000002004006008010012014016018020022024
(deg
rees
)
(b)
000
004
008
012
016
020
024
028
훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(c)
cs = 05
cs = 1
cs = 5
cs = 20
000
004
008
012
016
020
024
028훾[r
휀|Δ
2]mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
(d)
Figure 5 Angle measurement performance for different clutter shape parameters for 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRsof sum and difference channels are 20 dB and 15 dB respectively (a) Spatially independent texture case 119910119904119898 and 119910119889119898 are independent (b)Spatially independent texture case 119910119904119898 and 119910119889119898 are completely correlated (c) Spatially correlated texture case 119910119904119898 and 119910119889119898 are independent(d) Spatially correlated texture case 119910119904119898 and 119910119889119898 are completely correlated
shape parameter the values of Υ[119903120576 | Δ 2] in the spatiallycorrelated texture case are higher than those in the spatiallyindependent texture case Moreover for low shape parame-ters the decrease of Υ[119903120576 | Δ 2] with the increase of SCNRin the spatially correlated texture case is slow Converselythe comparisons of Figures 5(a) and 5(c) with Figures 5(b)and 5(d) indicate that even though the correlation propertiesof the texture components between the sum and differencechannels are completely opposite there are not the significant
differences of Υ[119903120576 | Δ 2] This implies again that an increasein the spatial correlation of the texture components resultsin a degeneration of the angle measurement performancefor the wideband monopulse radar but the effects from thecorrelation of the texture components between the sum anddifference channels are very feeble If both four differentcorrelation cases were considered simultaneously in thefollowing simulations the similar results should be observedIt is unnecessary that similar results are obtained repetitively
Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
minus024
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2]mdash
cond
ition
al m
ean
of M
R er
ror (
degr
ees)
(a)
cs = 05 cd = 05cs = 05 cd = 5
cs = 1 cd = 1
cs = 1 cd = 5
cs = 5 cd = 5
cs = 20 cd = 20
2 4 6 8 10 12 14 16 18 20 22 240Sum channel SCNR (dB)
001
002
003
004
005
006
007
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r (de
gree
s)
(b)
Figure 6 Conditional mean and conditional STD ofMR error for different clutter shape parameters when the texture is independent in rangeand 119910119904119898 and 119910119889119898 are independent where 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03 CNRs of sum and difference channels are 20 dB and 15 dBrespectively (a) Conditional mean of MR error (b) conditional STD of MR error
Therefore the following simulations are carried out onlyfor the case where the texture components are spatiallyindependent and 119910119904119898 and 119910119889119898 are independent423 Effect of the Correlation of the Speckle Components ofClutter In high resolution radar system for single rangecell the clutter of azimuth difference channel is uniformlydistributed across all angle scope of the main lobes ofdifference pattern but the off-boresight angle is bounded forthe clutter of elevation difference channel due to the rangesampling [1]The clutter returns aremodulated by the patterngains of the difference antennasTherefore the characteristicsof sea clutter are different between the elevation and theazimuth difference channels Figure 7 shows the processedresults of the measured clutter data including the CNRand correlation curves Three channels have the same noisepower In Figure 7(a) we can see that the shapes of CNRcurves are similar between the sum and the azimuth differ-ence channels but the one of elevation difference channelis completely different This agrees well with the theoreticalanalysis
In addition Figure 7(c) shows that in most range cellsthe texture components between the sum and differencechannels are almost completely correlated in elevation direc-tion and are partially correlated in azimuth direction How-ever there is a sharp drop in the correlation coefficients forboth elevation and azimuth directions in middle range cellsIn these range cells the texture components are lowly corre-lated Hence it can be accepted in the preceding analysis thatonly two extremes cases (ie independent and completelycorrelated cases) are considered for the correlation between119910119904119898 and 119910119889119898
The results shown in Figure 7(d) suggest that the specklecomponents of clutter between the sum and elevation dif-ference channels are correlated but those between the sumand azimuth difference channels are lowly correlated It canbe seen from (26) (27) and (31) that in the background ofsea clutter plus noise the angle measurement performance isrelated to the correlation of the clutter speckle componentsbetween the sum and difference channels as discussed in[1 10ndash13] in the background of noise Thus Figure 8 isplotted to illustrate the effects of the correlation coefficientsof the speckle components on the results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] According to (45) and (49)in the literature [10] the absolute value of 119864[119903120576 | Δ 2] and120590[119903120576 | Δ 2] decreases as correlation coefficient increases in theGaussian noise environment Similar results are also foundfor the K-distributed sea clutter plus noise environment asshown in Figure 8 When SCNR is low the performanceimprovement is significant by increasing the correlationcoefficient But this improvement can be ignoredwhen SCNRis high Furthermore it should be noted that only the real partof the correlation of the speckle components can significantlyaffect the angle measurement performance but the effects ofthe imaginary part are insignificant
424 Effect of the Deviation Angle When multiple targetsoccur in the measurement scene simultaneously only onetarget among of them can be set at the radar beam boresightand the others will deviate an angle from the boresightThereby it is necessary to study the effects of deviation angleon angle measurement performance The average powers ofthe target and of the clutter are modulated by the monopulseradar antenna gain patterns For convenience we assume
14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Mathematical Problems in Engineering
Azimuth difference Elevation difference Sum
200 400 600 800 1000 1200 1400 1600 18000Range bin
minus10minus8minus6minus4minus2
02468
10121416182022
CNR
(dB)
(a)
Azimuth Elevation
minus5
0
5
10
15
20
25
30
CNR
diffr
ence
(dB)
550 650 750 850 950 1050 1150450Range bin
(b)
00
02
04
06
08
10
12
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000abs (pitch channel)
Elevation Azimuth
(c)
The correlation coefficient of speckle components betweenthe azimuth difference and sum channels
The correlation coefficient of speckle components betweenthe elevation difference and sum channels
Real partImaginary partAbsolute
Real partImaginary partAbsolute
200 400 600 800 1000 1200 1400 1600 18000minus02minus01
00010203
Cor
relat
ion
coeffi
cien
t
200 400 600 800 1000 1200 1400 1600 18000Range bin
Range bin
minus08minus04
0004081216
Cor
relat
ion
coeffi
cien
t
(d)
Figure 7 Measured clutter data processing results (a) CNR of three channels (b) CNR difference between the sum and difference channel(c) the correlation coefficient of the texture components between the sum and difference channels (d) the correlation coefficient of the specklecomponents between the sum and difference channels
that while the elevation deviation angle varies the azimuthdeviation angle remains unchanged and vice versa 1198602 and1205902119888119904 denote the average powers of target and of clutter inthe sum channel at the boresight respectively At the off-boresight angle 120579 the average power of target in the sumchannel becomes [|119892Σ(120579)|2|119892Σ(0)|2]1198602 for both the elevationand azimuth directions However the changes of clutter
power with the variation of the off-boresight angle in theelevation and azimuth directions are different If in theelevation direction the average power of sea clutter withinthe same range cell of target becomes (|119892Σ(120579)|2|119892Σ(0)|2)1205902119888119904for the sum channel and (|119892Δ(120579)|2|119892Δ(120579119889)|2)1205902119888119889 for thedifference channel respectively where 1205902119888119889 is the max clutterpower in the elevation difference channel and is obtained
Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 15
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
000
004
008
012
016
020
(deg
rees
)
(a)
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
minus020
minus016
minus012
minus008
minus004
000
E[r
휀|Δ
2] mdash
cond
ition
al m
ean
of M
R er
ror
(deg
rees
)
(b)
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r
01 + 1j lowast 01
04 + 1j lowast 01
08 + 1j lowast 01
08 + 1j lowast 06
04 + 1j lowast 04
0005
0010
0015
0020
0025
0030
0035
0040
0045
(deg
rees
)
2 4 6 8 10 12 14 16 18 20 22 240SCNR (dB)
(c)
Figure 8 Performances of angle measurement in different correlation coefficients for V = 1 1205902119899119904 = 1 119875119891 = 10minus4 119875opt = 8 and 120579 = 03CNRs of sum and difference channels are 20 dB and 15 dB respectively (a) Conditional RMSE of MR (b) conditional mean of MR error (c)conditional standard deviation of MR error
when the elevation deviation angle is 120579119889 But if in the azimuthdirection the average powers of sea clutter in the sum anddifference channels always remain the initial power
In Figure 9 Υ[119903120576 | Δ 2] is plotted against the deviationangle for different CNRs In those simulations the SCNRand CNR belong to the sum channel at the boresight TheCNR of azimuth difference channel is set to be the CNR ofsum channel minus 5 dB The maximum CNR of elevationdifference channel is also set to be the CNR of sum channelminus 5 dB when 120579119889 = 055∘
From Figure 9 we can see that in both the azimuthand elevation directions Υ[119903120576 | Δ 2] is monotonouslyincreasing function of deviation angle The target average
power decreases as the deviation angle increases resultingin the decrease of SCNR Hence the performance of anglemeasurement worsens with the increase of the deviationangle As mentioned earlier when the off-boresight angleoccurs in the azimuth direction the difference and sumchannels CNRs do not vary When the off-boresight angleoccurs in the elevation direction the difference and sumchannel CNRs vary with variation of the deviation angleTherefore in Figure 9 the decreasing degree and speed ofazimuth angle measurement performance are greater thanthose of elevation angle measurement performance Onthe other hand in Figure 9(a) the decreasing degrees ofΥ[119903120576 | Δ 2] with the increase of the elevation deviation angle
16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

16 Mathematical Problems in Engineering
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
000
001
002
003
004
005
006
007
008
009
010
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R (d
egre
es)
01
CNRCNR
CNRCNR
CNR
02 03 04 05 06 07 08 0900Deviation angle (degrees)
(a)
= minus3 dB= 5 dB= 12 dB
= 15 dB= 25 dB
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
002
004
006
008
010
012
014
(deg
rees
)
00 01 02Deviation angle (degrees)
03 04 05 06 07 08 09
CNRCNRCNR
CNRCNR
(b)
Figure 9 Υ[119903120576 | Δ 2] against the deviation angle in different CNRs for SCNR = 126 dB V = 1 1205902119899119904 = 1 119875119891 = 10minus4 and 119875opt = 8 (a) Elevationdirection (b) azimuth direction
are approximately equivalent for different CNRs Howeverin Figure 9(b) the higher the CNRs are the greater thedecreasing degrees of Υ[119903120576 | Δ 2] with the increase of theazimuth deviation angle are
425 The Difference of the Effects between Sea Clutter andNoise Theeffects of sea clutter onmonopulse anglemeasure-ment and those of noise are different In the background ofclutter plus noise the change of CNR will cause the changeof the angle measurement performance To illustrate thisthe angle measurement performances in different CNR casesare analyzed In Figure 7(b) the CNR difference betweenthe sum and difference channels in azimuth barely variesand is approximated to 5 dB whereas the one in elevationincreases with the decrease of deviation angle and reachesthemaximumon the boresightWhen the elevation deviationangle is small the CNR of sum channel is always biggerthan those of both azimuth and elevation difference channelsand the CNR of elevation difference channel is much smallerthan that of azimuth difference channel Herein the valuesof the CNR of sum channel minus 5 dB and 20 dB are setas the CNRs of azimuth and elevation difference channelsrespectively To avoid the effects of target deviation angle itis assumed that the deviation angles of target in elevation andazimuth directions are the same The results of Υ[119903120576 | Δ 2]119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] are shown in Figure 10 wherethe values of CNR are sum channel clutters and the totals ofclutter and noise powers are equal for all cases
It can be clearly seen from Figures 10(b) and 10(c) that asthe CNR increases the absolute value of 119864[119903120576 | Δ 2] increasesand 120590[119903120576 | Δ 2] decreases Moreover when the target has lowSCNR the absolute values of 119864[119903120576 | Δ 2] in high CNR casesare far larger than those in low CNR cases but the valuesof 120590[119903120576 | Δ 2] in high CNR cases are much smaller than
those in low CNR cases This confirms that the effects of seaclutter on monopulse angle measurement and those of noiseare differentThe noise mainly affects the standard divinationof angle measurement error The clutter has a ldquopullingrdquo effectsimilar to that of an unresolved second target It mainlyaffects the mean of angle measurement error In particularthe clutter contributes an error mean that can be significantat low SCNR
In addition as the target SCNR increases the decrease of119864[119903120576 | Δ 2] is very evident for the high CNR cases whereasthe decrease of 120590[119903120576 | Δ 2] is evident for the low CNRcases When the target has high enough SCNR there areclose values of 119864[119903120576 | Δ 2] for all cases and these valueshave a tendency of approaching zero However under thesame SCNR condition 120590[119903120576 | Δ 2] still decreases as the CNRincreases Consequently it is clearly shown in Figure 10(a)that Υ[119903120576 | Δ 2] increases with increasing CNR when thetarget has low SCNR but it decreaseswhen the target has highSCNR In addition Figure 10(a) suggests that there is a moreserious angle estimation error for the high CNR cases whenthe target has low SCNR Asmentioned above themaximumpossible value of RMSE is of the order of the beamwidthWhen the monopulse radar has a much wider beamwidththe distance error due to the angle measurement error mayeasily reach the several lengths of the extended target in thehigh CNR case so that the measurement will be used to forma new track and steal the measurement of the existing track
On the other hand it can also be seen that the absolutevalues of Υ[119903120576 | Δ 2] 119864[119903120576 | Δ 2] and 120590[119903120576 | Δ 2] inelevation are smaller than those in azimuth This is notsurprising since the sum channel returns are used togetherfor the angle measurements in elevation and azimuth andthe CNR of elevation difference channel is lower than theone of azimuth difference channel around the boresight
Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 17
Elevation difference channel
Azimuth difference channel
0 5 10Target average power (dB)
15 20 25 30 35 40
훾[r
휀|Δ
2] mdash
cond
ition
al R
MSE
of M
R
000
005
010
015
020
025
030(d
egre
es)
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(a)
Azimuth difference channel
Elevation difference channelminus030
minus025
minus020
minus015
minus010
minus005
000
(deg
rees
) mdash
cond
ition
al m
ean
of M
R er
ror
E[r
휀|Δ
2]
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(b)
Azimuth difference channel
Elevation difference channel000
002
004
006
008
010
012
훿[r
휀|Δ
2] mdash
cond
ition
al S
TD o
f MR
erro
r(d
egre
es)
0 5 10Target average power (dB)
15 20 25 30 35 40
= minus10 dB= 0 dB= 5 dB
= 10 dB= 20 dB
CNRCNRCNR
CNRCNR
(c)
Figure 10 Performances of angle measurement for different clutter CNRs for V = 1 119875119891 = 10minus4 119875opt = 8 1205902119888119904 + 1205902119899119904 = 15 dB and 120579 = 03 (a)Conditional RMSE of MR (b) conditional mean of MR error (c) conditional standard deviation of MR error
Meanwhile the deviation angles of target in elevation andazimuth are assumed to be the same This indicates that theangle measurement in elevation is better than the one inazimuth when the elevation and azimuth deviation anglesof target are the same and are small However although theCNR of azimuth difference channel is far higher than the oneof the elevation channel the differences of the performancebetween the elevation and azimuth angle measurements arenot obvious
5 Conclusion
In this paper according to the angle measurement methodwith wideband monopulse radar and the binary detector wededuce the conditional pdf of MR error for the targets on the
sea We consider both the spatial correlation of the texturecomponents for each channel clutter and the correlation ofthe texture components between the sum and the differencechannel clutter For each correlation of the texture compo-nents two bounding cases namely the independent andthe completely correlated cases are discussed Furthermorethe modified experiential formula of the optimal parametersetting for binary detector is developed to apply in thebackground of 119870-distributed sea clutter plus noise Then theeffects of relevant parameters of clutter and detector on anglemeasurement performance are analyzed Simulation resultsshow the following
(1) The effect of sea clutter on monopulse angle mea-surement performance is mainly reflected in affecting theangle-measuring bias and the effect of Gaussian noise
18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

18 Mathematical Problems in Engineering
on monopulse angle measurement performance is mainlyreflected in affecting the angle-measuring standard deviationThe clutter contributes a bias that can be significant at lowSCNR
(2) The effect of K-distributed sea clutter on monopulseangle measurement performance is related to its shapeparameter The angle measurement performance weakens asshape parameter decreases when the SCNR of sum channel islow
(3) The performance of angle measurement is optimal atthe boresight It weakens as deviation angle decreases Theperformance deterioration of detection and angle measure-ment are more serious in azimuth than elevation
(4) The effects of the correlation between the sum anddifference channel clutter on monopulse angle measure-ment performance include two aspects the effects from thecorrelation of the texture components are very feeble andan increase in the correlation of the speckle componentswill result in an improvement of the angle measurementperformance
(5) The increase in spatial correlation of the texturecomponents will result in a degeneration of the angle mea-surement performance for the wideband monopulse radar
For any radar designer it is a great challenge to detect andtrack the sea surface target by using the widebandmonopulseradar Our work provides a comprehensive understanding ofthe effect of the design of wideband monopulse radar on theangle measurement performance in K-distributed sea clutterplus noise In this paper we do not consider the effects ofmultipath and flare angle of target We plan to study theseissues as a future work
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] S M Sherman Monopulse Principles and Techniques ArtechHouse Inc 2nd edition 2011
[2] E Daeipour W D Blair and Y Bar-Shalom ldquoBias compen-sation and tracking with monopulse radars in the presenceof multipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 33 no 3 pp 863ndash882 1997
[3] H Z Zhao ldquoHigh resolution profile-based angular trackingtechnology for monopulse radarrdquo Acta Electronica Sinica vol28 no 4 pp 1ndash4 2000
[4] T Zhang Q Zhang C Z Ma and S H Zhang ldquoA study of thesuppression of the angle glint based on high resolution profilerdquoJournal of Xidian University vol 28 no 3 pp 296ndash300 2001
[5] Q Li S H Zhang H Y Zhang and Z Liu ldquoMaximum entropymethod for angle estimation in wideband monopulse trackingradarrdquo Acta Electronica Sinica vol 34 no 12 pp 2180ndash21842006
[6] J H Liu X H Zheng and L Sun ldquoAnalysis of simulation on theactive seeker low altitude multipath problemrdquoModern DefenceTechnology vol 35 no 3 pp 82ndash85 2007
[7] K Haspert and M Tuley ldquoComparison of predicted andmeasured multipath impulse responsesrdquo IEEE Transactions onAerospace and Electronic Systems vol 47 no 3 pp 1696ndash17092011
[8] A Sinha Y Bar-Shalom W D Blair and T KirubarajanldquoRadar measurement extraction in the presence of sea-surfacemultipathrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 39 no 2 pp 550ndash567 2003
[9] Y Yang D-J Feng X-S Wang and S-P Xiao ldquoEffects of kdistributed sea clutter and multipath on radar detection of lowaltitude sea surface targetsrdquo IET Radar Sonar and Navigationvol 8 no 7 pp 757ndash766 2014
[10] A D Seifer ldquoMonopulse-radar angle tracking in noise ornoise jammingrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 28 no 3 pp 622ndash638 1992
[11] A D Seifer ldquoMonopulse-radar angle measurement in noiserdquoIEEE Transactions on Aerospace and Electronic Systems vol 30no 3 pp 950ndash957 1994
[12] G W Groves W Dale Blair and W C Chow ldquoProbabilitydistribution of complex monopulse ratio with arbitrary corre-lation between channelsrdquo IEEE Transactions on Aerospace andElectronic Systems vol 33 no 4 pp 1345ndash1350 1997
[13] E Chaumette and P Larzabal ldquoStatistical prediction ofmonopulse angle measurementrdquo IET Radar Sonar and Naviga-tion vol 1 no 5 pp 377ndash387 2007
[14] K D Ward R J A Tough and S Watts Sea Clutter ScatteringThe K Distribution and Radar Performance IET London UK2nd edition 2013
[15] E Conte A De Maio and C Galdi ldquoStatistical analysis ofreal clutter at different range resolutionsrdquo IEEE Transactions onAerospace and Electronic Systems vol 40 no 3 pp 903ndash9182004
[16] M Greco F Gini and M Rangaswamy ldquoStatistical analysis ofmeasured polarimetric clutter data at different range resolu-tionsrdquo IEE Proceedings Radar Sonar and Navigation vol 153no 6 pp 473ndash481 2006
[17] Y Yang S-P Xiao D-J Feng and W-M Zhang ldquoModellingand simulation of spatial-temporal correlated K distributedclutter for coherent radar seekerrdquo IET Radar Sonar and Navi-gation vol 8 no 1 pp 1ndash8 2014
[18] F AluffiPentini A Farina and F Zirilli ldquoRadar detection oftargets located in a coherent K distributed clutter backgroundrdquoIEE Proceedings F (Radar and Signal Processing) vol 139 no 3pp 239ndash244 1992
[19] E Conte and G Ricci ldquoPerformance prediction in compound-gaussian clutterrdquo IEEE Transactions on Aerospace and ElectronicSystems vol 30 no 2 pp 611ndash616 1994
[20] B C Armstrong and H D Griffiths ldquoCFAR detection offluctuating targets in spatially correlated K-distributed clutterrdquoIEE Proceedings F (Radar and Signal Processing) vol 138 pp139ndash151 1991
[21] S D Blunt K Gerlach and J Heyer ldquoHRR detector for slow-moving targets in sea clutterrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 43 no 3 pp 965ndash974 2007
[22] H Z Zhao ldquoOptimal binary detection strategy for range-extended targets in sea clutterrdquo Systems Engineering and Elec-tronics vol 33 no 5 pp 982ndash986 2011
[23] Y Z Chen ldquoOptimal binary detection for distributed targetsrdquoSystems Engineering and Electronics vol 33 no 1 pp 26ndash292011
Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 19
[24] D Wu D Zhu M Shen and Y Li ldquoStatistical analysis ofmonopulse-synthetic aperture radar for constant false-alarmrate detection of ground moving targetsrdquo IET Radar Sonar andNavigation vol 9 no 6 pp 641ndash652 2015
[25] S Watts ldquoCell-averaging CFAR gain in spatially correlatedK-distributed clutterrdquo IEE Proceedings - Radar Sonar andNavigation vol 143 no 5 pp 321ndash327 1996
[26] A Papoulis and S U Pillai Probability Random Variables andStochastic Processes McGraww-Hill New York NY USA 4thedition 2002
[27] S Watts ldquoRadar detection prediction in sea clutter using thecompound K -distributionmodelrdquo IEE Proceedings vol 132 no7 pp 613ndash620 1985
[28] M A Richards J A Scheer and W A Holm Principles ofModern Radar Volume 1 Basic Principles SciTech PublishingCompany 2010
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of