Dynamic modeling and simulation of transmotor based series parallel
16
Dynamic Modeling and Simulation of Transmotor Based Series-Parallel HEV Applied to Toyota Prius 2004 Hiva Nasiri Ahmad Radan Abbas Ghayebloo Kiarash Ahi If you want to use these slides, please reference to our work: H. Nasiri, A. Radan, A. Ghayebloo, and K. Ahi, “Dynamic modeling and simulation of transmotor based series- parallel HEV applied to Toyota Prius 2004,” in Environment and Electrical Engineering (EEEIC), 2011 10th International Conference on, 2011, pp. 1–4. Online Access: https://www.researchgate.net/publication/
-
Upload
kiarash-ahi -
Category
Engineering
-
view
54 -
download
5
Transcript of Dynamic modeling and simulation of transmotor based series parallel

Dynamic Modeling and Simulation of Transmotor Based Series-Parallel HEV Applied to Toyota Prius 2004
Hiva Nasiri Ahmad Radan Abbas Ghayebloo Kiarash Ahi
If you want to use these slides, please reference to our work:
H. Nasiri, A. Radan, A. Ghayebloo, and K. Ahi, “Dynamic modeling and simulation of transmotor based series-parallel HEV applied to Toyota Prius 2004,” in Environment
and Electrical Engineering (EEEIC), 2011 10th International Conference on, 2011, pp. 1–4.
Online Access:https://www.researchgate.net/publication/
235936071_Dynamic_modeling_and_simulation_of_transmotor_based_series-parallel_HEV_applied_to_Toyota_Prius_2004

Introduction Components Models Topology of Transmotor Based HEV Operating Modes Simulink model Simulation results Conclusion
Index
The 'Ts' parameter used in this model is set to 6e-5 by the Model Properties Callbacks
Energy ManagementSubsystem
ICE
Motor
Vehicle Dynamics
Hybrid Electric Vehicle (HEV) Power Train Using Battery Model
Power Subsystem
Transmotor
1
Car Speed km/h
Discrete,Ts = 6e-005 s.
pow ergui
Wice
Wmot
Tgen
Vg
Wgen
Igen
ICEMotor
v
SpSns1
v
SpSen2
T
SIm/SDL1
[Th_ICE]
[Wgen]
[Tgen]
[Tbrk]
[Tmot]
[Batt]
[Igen]
[Wmot]
[Imot]
[DC_CTL]
[Wice]
[Wmot]
Torque
[Tmot]
[Batt]
[Wmot]
Power
[Wgen]
[Tgen]
[Imot]
[Igen]
Vg
[Tbrk]
[Wmot]
[Wice]
[Th_ICE]
Vm
[DC_CTL]
[Wice]
Accelerator
Batt
Wmot
Wgen
Wice
Tmot
Tgen
Tbrk
Th_ICE
DC_CTL
Car
2
Road Angle
1
Accelerator
Accelerator
Electrical Power (Motor, Generator, Battery )
Driv e torque (ref erence, measured)
Car speed (km/h)Car speed (km/h)

HEV : increase the efficiency of gasoline vehicles
Toyota Prius: one of the first industrialized HEVs
In Prius: a planetary gear provides speed coupling
The planetary gear: increasing car’s overall cost and weight
In this paper: Prius 2004 is simulated with Transmotor in place of planetary gear and generator
Introduction

Transmotor◦Static Model:◦ Dynamic Model:
Components Models
e r s
es ms er mrT T T T
ωr and ωs are outer and inner rotor speeds respectively and ωe is the inner rotor (rotor) relative speed to the outer rotor (stator)

Transmotor◦ Static Model:
◦Dynamic Model:
Components Models
( )qsqs s qs r s ds
dv R i p
dt
( )dsds s ds r s qs
dv R i p
dt
qs qs qsL i
ds m ds dsL i
3( ( ) )
2es er qs m ds qs ds qsT T p i L L i i
ses ms s s s
dT T J B
dt
rer mr r r r
dT T J B
dt

ICE
Components Models
The model uses a look-up table for its speed-torque characteristic

Energy Management◦When vehicle should activate hybrid mode◦Which part should provide torque◦How much torque should be provided◦Mechanical brake should be used◦Decisions are based on SOC, speed of the vehicle and
demanded power
Components Models

Topology of Transmotor Based HEV
The Engine power through Transmotor transfers to differential and combined with traction motor, provides the vehicle traction force.

Single mode: only traction motor Hybrid mode: motor and ICE◦ When vehicle reaches a specific speed◦ When battery’s SOC comes down to a specific percent◦ When demanded power is higher than a specific kWh
A complete drive cycle◦ Start◦ Accelerate◦ Cruise◦ Brake
Operating Modes

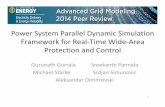
MATLAB Simulink model
The 'Ts' parameter used in this model is set to 6e-5 by the Model Properties Callbacks
Energy ManagementSubsystem
ICE
Motor
Vehicle Dynamics
Hybrid Electric Vehicle (HEV) Power Train Using Battery Model
Power Subsystem
Transmotor
1
Car Speed km/h
Discrete,Ts = 6e-005 s.
pow ergui
Wice
Wmot
Tgen
Vg
Wgen
Igen
ICEMotor
v
SpSns1
v
SpSen2
T
SIm/SDL1
[Th_ICE]
[Wgen]
[Tgen]
[Tbrk]
[Tmot]
[Batt]
[Igen]
[Wmot]
[Imot]
[DC_CTL]
[Wice]
[Wmot]
Torque
[Tmot]
[Batt]
[Wmot]
Power
[Wgen]
[Tgen]
[Imot]
[Igen]
Vg
[Tbrk]
[Wmot]
[Wice]
[Th_ICE]
Vm
[DC_CTL]
[Wice]
Accelerator
Batt
Wmot
Wgen
Wice
Tmot
Tgen
Tbrk
Th_ICE
DC_CTL
Car
2
Road Angle
1
Accelerator
Accelerator
Electrical Power (Motor, Generator, Battery )
Driv e torque (ref erence, measured)
Car speed (km/h)Car speed (km/h)
MATLAB Block Diagram

MATLAB Simulink model
Subassembly Specifications
Description Value
Traction motor Power 50 kW
Machine type 4 pole pairs PMSM
Maximum torque 400 Nm
Transmotor Power 30 kW
Machine type 1pole pairs PMSM
Maximum torque 130 Nm
ICE Power 57 kW
Maximum torque 115 Nm at 4200rpm
Vehicle Dynamic Mass 1325 kg
Frontal area 2.57 m^2
Sample Specifications

a) Drive power
b) ICE power
c) Generator and battery power
d) Hybrid mode indicator
Simulation results
0 10 20 30 40 50 60-5
0
5x 10
4 Drive Power(Reference, Measured)(W)
0 10 20 30 40 50 60
0
2
4
x 104 ICE Power(Reference, Measured)(W)
0 10 20 30 40 50 60
-2
0
2
x 104 Generator Power, Battery Power
0 10 20 30 40 50 600
0.5
1
Hybrid Mode

a) With Transmotor
b) With generator and planetary gear
Simulation results
0 10 20 30 40 50 6055
56
57
58
59
60
61
Time(s)
SOC(%) Transmotor based HEV
0 10 20 30 40 50 6059
60
61
62
63
64
Time (s)
SOC(%) Planetary Gear (Simple Generator)
Battery State of Charge (SOC)

Simulation results
0 10 20 30 40 50 600
10
20
30
40
50
60
70
80
Time(s)
Veh
icle
Spe
ed(k
m/h
)
DOE result Vehicle Speed(km/h) VS Time(s)
0 10 20 30 40 50 600
10
20
30
40
50
60
70
80
Time(s)
Veh
icle
Spe
ed(k
m/h
)
Simulation result Vehicle Speed(km/h) VS Time(s)
0 10 20 30 40 50 600
10
20
30
40
50
60
70
80Compared Results DOE and Simulation
Time(s)
Vehi
cle
Spee
d(km
/h)

a new series-parallel HEV topology has been dynamically modeled and simulated
The model is adopted to Toyota Prius 2004 specifications according to U.S. DOE report
Generator and planetary gear has been replaced by Transmotor
Simulation results compared to U.S. DOE report of Toyota Prius 2004 indicates the accuracy of model
Conclusion

M. Ehsani, Y. Gao and A. Emadi “Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design” SE, CRC Press, 2010, pp. 141-150.
U. S. Dept. Energy, “Evaluation of 2004 Toyota Prius Hybrid Electric Drive System”Tech. Rep. ORNL/TM- 2006/423, May 2006. [Online] Available at: http://inspire.ornl.gov/OriginalDocument/f38948a5-d6a2- 4f80-8cc9-34b77e3862a3
K. Muta, M. Yamazaki and J.Tokieda, “Development of New-Generation Hybrid System THS II – Drastic improvement of Power Performance and Fuel Economy” Tech. paper series, 2004-01-0064, Detroit, MI, March 8-11, 2004
MATLAB Simulink Software,” Hybrid Electric Vehicle model” Version 2008 and 2009
References