DOD RESEARCH PROGRAM SILVER SPRING MD NAVAL … · OERFORMING ORGANIZATION NAME AND ADDRESS 10....
17
7 AD-AGO 744 NAVAL SURFACE WEAPONS CENTER SILVER SPRING MD F/B 9/2 DOD RESEARCH PROGRAM IN RO8OTICS. (IW SEP 80 J M RANISHI UNCLASSIFIED NSWC/TR-80-325 SEET
Transcript of DOD RESEARCH PROGRAM SILVER SPRING MD NAVAL … · OERFORMING ORGANIZATION NAME AND ADDRESS 10....
7 AD-AGO 744 NAVAL SURFACE WEAPONS CENTER SILVER SPRING MD F/B 9/2
DOD RESEARCH PROGRAM IN RO8OTICS. (IW
SEP 80 J M RANISHI
UNCLASSIFIED NSWC/TR-80-325
SEET
NSWC TR 80-325
DOD RESEARCH PROGRAM IN ROBOTICS
O BY JOHN M. VRANISH
ENGINEERING DEPARTMENT
10 SEPTEMBER 1980
Approved for public release. distributin unlimited . '302CLt4SW
j NAVAL SURFACE WEAPONS CENTERDahlgren, Virginia 22448 0 Silver Spring, Maryland 20910
UNCLASSIFIED. i-IT'v :LASSI FICATION Z"F "-IS PAGE '14hen Doi EnfetdlJ
REPORT DOCUMENTATION PAGE READ INSTRUCTIONSRE R BEFORE COMPLETI'G FORMI 0 .R6mOAT m ..mi L - 2 - GOVT' ACCESSION NO., 3 RECIPIENT'S AIAOG', NMgEP
NSWC./TR-O-325 v AIZT) ,k. 7'9_-4, TILE (ad S.&.bIeJ -, E oF Po1T.-emeo ROvEO
DOD RESEARCH PROGRAM IN ROBOTICS . n
6PERFORMING ORG. REPORT NUMBER
'1." AI.T111R(4118 S . CONT RACT OR GRANT NUMBER(s)
, John M. Vranish
9. OERFORMING ORGANIZATION NAME AND ADDRESS 10. PROGRAM E.EMEN-. PROJECT. TASKAREA & WORK UJNI' NUMBERS
Naval Surface Weapons CenterWhite Oak ,-qivpr Spring. Mary And' 2flQlf
I1. CONTROLL.ING OFFICE NAME AND ADDRESS 12. REPORT DATE
---;NU.MMBER oFA~13__ _,/__ _ _".__ 13
14. MONITORING AGENCY NAME I AODRESSIi dliferenf from Con.rollng Office) 15. SECURITY CLASS. (o mpow,
UN CLASS IF IEDISa. DECLASSIFICATION DOWNGQACING
SCNEOULE
16. DISTRIBUTION STATEMENT (of ti Report)
Approved for public release; distribution unlimited
17. DISTRIBUTION STATEMENT (of Che abstact entered In Block 20. II d). Iorent from Report)
IS. SUPPLEMENTARY NOTES
19. KEY WORDS (Continue on reverse side If neceesary and Identify by block number)
RoboticsAbtificial IntelligenceManipulations ctComputers
ABISTRACT (Continlue on rovers* saide itncesr anld Idenlt "y by blockJ(;number)
"This paper is a broad, brief overvi'ew of the 000 Research Program inRobotics. It begins with background examples on some of the needs and currentrobotic techniques being used in 000 activities. It then discusses near futurerobotic systems currently projected for funding. Next, projections are madefor the more far-term future DOD robotic systems. Finally, specific areasrequiring research are delineated and Navy research programs are identifiedwhich address these areas.
DD , O ,. - 1473 EZIN 0 NO ; 5 o9sC.E_ UNCLASSIFIED .K -
" _ . . ", . ., - - - 2

UNCLASSIFIEDSEZ:--i"v C.ASSIFICATION OF THIS PAGE f~hen Data Entvred
UNCLASSIFIED
SECURITY C'.ASSIFICATION Ow THIS PAG'Whyer Data IElp~dl
NSWC TR 80-325
FOREWORD
This report documents the NSWC perception of the DOD ResearchProgram in Robotics. It was written in response to a request fromthe Plans and Operations Office of the Department of the Army, HarryDiamond Laboratories (HDL), Adelphi, Maryland. HDL also providedscope and content guidance. This report takes a broad view and con-siders all three services. Current applications and near-futureprojections are examined, in addition to the more far-term 6.1 efforts.In discussing these 6.1 efforts, specific research projects are listedwhich are typical of the important areas of robotics, thus providingthe reader with a clear picture of the overall direction of the DODResearch Program. The author gratefully acknowledges the assistanceof Mr. Marvin Denicoff, Office of Naval Research.
T.R. McKNIGHT
By direction
ii
!/
1/2
.. i s "I

NSWC TR 80-325
CONTENTS
Page
WHAT IS A ROBOT .. .................. .. ............. 5HOW DO ROBOTS IMPACT DOD .......... ................... 5WHAT RESEARCH IS NEEDED ........... .................... 7WHAT RESEARCH IS BEING DONE ......... .................. 10
ILLUSTRATIONS
Figure Page
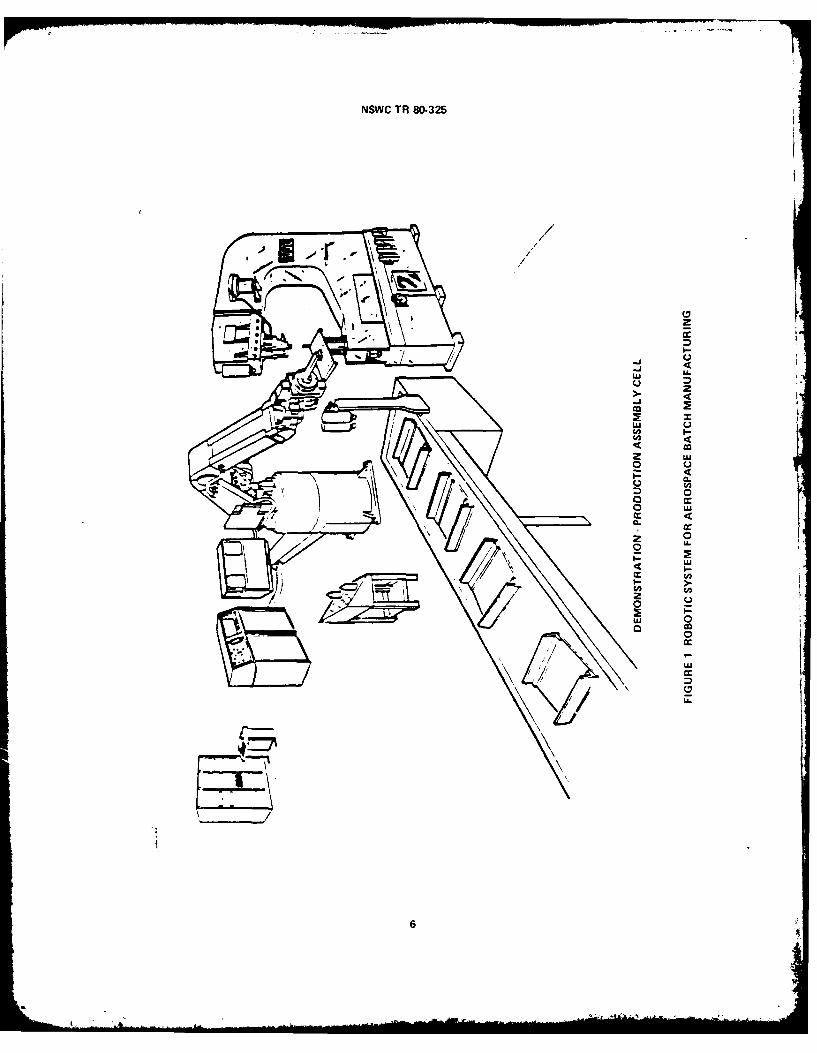
1 ROBOTIC SYSTEM FOR AEROSPACE BATCH MANUFACTURING. . .. 62a ROBOTIC DERIVETER SYSTEM CONCEPTUALIZATION ...... 82b SMART TOOL HEAD CONCEPTUALIZATION ...... ........... 9
3/4

NSWC TR 80-325
DOD RESEARCH PROGRAM IN ROBOTICS
1. WHAT IS A ROBOT
Of the several current definitions, the following is as inclusiveas any: "A machine that can duplicate human skills and flexibilitywith accuracy and precision."' Robotics technology in industry isdriven primarily by the need to achieve flexible, low cost/high pro-ductivity automation. American industry today has 3,000 robots inuse; Japanese industry utilizes 7,000. By 1995, the Society ofManufacturing Engineers predicts that 50% of automobile assembly willbe accomplished by automated machines and robots. 2
2. HOW DO ROBOTS IMPACT DOD
DOD has all of the cost/productivity/worker morale problems ofindustry plus a few special problems of its own. Not only must DODmanufacture systems, it must also support and maintain these systemsacross a far-flung theater of operations in frequently hostileoperating environments, using a largely unskilled labor force thathas a high turnover rate. Thus, the demand for intelligent, flexibleautomation (robots) is obvious.
a. PRESENT. All three DOD services are starting with the problemof productionF- the simplest starting point. The Air Force ICAM(Integrated Computer Aided Manufacture) project is the most visibleand is addressing aircraft manufacture. Figure 13 illustrates workon the F-15 fighter. The Army is also using industrial robots for:
I Industrial Robots, Vol. I/Fundamentals; Copyright 19'9 SME,Dearborn, Mich. 48148.
NEXT Magazine, May/June 1980, p. 32.
3 Robotic System For Aerospace Batch Manufacturing. IR-812-8(I)First Quarterly Tech. Report, Nov. 197G by Air Force Materials Lab.Wright-Patterson Air Base, p. 3.23.
5
NSWC TR 80-325
IA/Q
>
CO)
z z
CA,0
2
0
o LU
6

NSWC TR 80-325
(1) robotized benching operations4 and loading of Numerical ControlMachines For Cannon and Breach Manufacture; 5 and (2) automatedmunitions handling.0
b. NEAR TERM. The use of robots in DOD systems manufacturingwill continue to escalate in parallel with industry. Depot and in-termediate maintenance activities will begin to use robots as thetechnology matures to the point where robots can deal with the com-plications and variations associated with maintenance and repair.An example of this is the Navy Robotic Deriveter which is scheduledfor a 2-year development program commencing in F 81. This roboticsystem will use an ultra-sonic sensor and "common sense artificialintelligence" to figure out the rivet pattern, and rapidly inspect(the airframe structure around each rivet) and remo'ye the rivets.This flexible system will be able to handle several different sizesof rivets in a variety of patterns on many different ircraft types.(Deriveting in the Navy is necessary because of salt Water corrosiondamage to airframes.) Figures 2a and 2b illustrate t e RoboticDeriveter.
7
c. FAR-TERM. Robots will be developed for DOD field uses toassist combat and support forces. These field application willplace still greater requirements on robots to be more flexi le,intelligent and to have sensory capabilities. An example i theOffice of Naval Research suggestion that much of the mainten ce onboard ship can be done more efficiently by using a work cell eratedby intelligent robots to manufacture parts on a need-basis rat er thancarrying vast numbers of spares which are seldom or never used.
3. WHAT RESEARCH IS NEEDED
Clearly, research is needed that will improve: (a) the sensorycapabilities of robots (specifically artificial recognition); (b) thlthinking capability of robots (specifically artificial intelligence*)and (c) the motor and physical dexterity capabilities of robots (suchas the tendon research being done at MIT).
4 Manufacturing Methods and Technology, Program Plan CY 1979, U.S.Army Industrial Base Engineering Activity, Rock Island, Illinois,p. 68.
5 Ibid; p. 61.
6 Ibid; p. 39.
7 Vranish, J.M., "The Robotic Deriveter - Systems Concept," NSWC TR80-353, Sep 1980.
• Artificial Intelligence allows Robots to exhibit intelligent be-havior without resorting to massive computers and computationalcapabilities.
7 .

NSWC TR 80325
0~ Q~
I LU LU
QU O.61=LI.'LI C2~j0 J=
I*- zjC3L
=cD 0
LU -z
-aa
A /iw LwLA6 D 1. C. La C.)CA0
/ ic AL10
)L LU'U
800)S
NOp

NSWC TR 80-325
00
L.6 w z
to Nn C MT .-J0 w
o 0 CL C
-0
\-4- c u, c0-
0cc U.LU
cc z
CJI
cn0
90
Low I
NSWC TR 80-325
4. WHAT RESEARCH IS BEING DONE
Many DOD 6.1 research thrusts and projects are being pursued,some of which are listed below:'
a. SENSORY CAPABILITIES OF ROBOTS AND MAN-MACHINE INTERFACES.
(i) Context Pattern Recognition - Prof. Riseman, Universityof Massachusetts. (General).
(2) Sketch Recognition (Vision) - Prof. Negroponte, MIT.
(3) Natural Language Interaction (Speech) - Prcf. Schank,Yale University.
(4) Linguistics Pattern Theory (Speech) - Prof. Freiberger,Brown University.
(5) Image Modelling Workshop (Vision) - Prof. Rosenfeld,University of Maryland.
(6) Speech/Picture Processing (Speech/Vision) -
Prof. Oppenheim, MIT.
b. THE THINKING CAPABILITY OF ROBOTS.
(1) Intelligent Automata - Prof. Winston, MIT.
(2) Evaluation Artificial Intelligence Algorithm -
Prof. Harrison, New York University.
(3) Knowledge - Based Problem Solving - Prof. Minskey, MIT.
(4) Distributed Problem Solving - Prof. Lesser, University ofMassachusetts.
(5) Automated Knowledge Acquisition - Prof. Reddy, CarnegieMellon University.
(6) Complex Textual Problem Solving - Prof. Charniak, BrownUniversity.
(7) Complex Planning and Action System - Prof. Sacerdoti,SRI International.
e Active Contracts, Office of Naval Research; Information ScienceProgram, 31 Dec 1979.
102!
NSWC TR 80-325
c. THE MOTOR AND PHYSICAL DEXTERITY OF ROBOTS.
(1) Robot Tendon Research - Prof. Horn, MIT.
(2) Automated Maintenance - Prof. Feldman, University ofRochester.
(3) Distributed Robot Command and Control - Prof. Nilsson,SRI International.
'1
11/12
!,

NSWC TR 80-325
DISTRIBUTION
Copies
Chief of Naval Material CommandAttn: J.W. Tweedale OASN 1 Naval Aviation Logistics Center
D. Carstater (MAT 622) 1 Attn: CAPT K. Tracy IF. Holden (MAT 382) 1 Naval Air Station
Navy Department Patuxent River, Maryland 20670Washington, D.C. 20360
Professor M. Xiite 1Commander Westinghouse Electric Co.Naval Air Systems Command Advanced Technology Labs.
Attn: C. Caposell (612) 1 Mail Stop 3531R. Retta (1012) 1 Baltimore, Md. 21203L.F. Milan (4105B) 1
Naval Air Systems Command Professor Knowles 1Headquarters Professor Mitchell IWashington, D.C. 20361 Professor Dewar 1
U.S. Naval AcademyCommander Mail Drop 14aNaval Sea Systems Command Annapolis Maryland 21402Attn: Raye Parrott Asa
Thomas U. Draschil 1 Commanding OfficerHarry Byron 1 Attn: Dr. Slagle ICode 04 Dr. John Dixon 1
Naval Sea Systems Command Naval Research LaboratoryWashington, D.C. 20362 Washington, D.C. 20375
Commanding Officer Dr. R.E. BrownNaval Weapons Station Plans and Operations OfficeAttn: CDR T.E. Dyer 1 Code 00210
LT.CDR. Noble 1 Harry Diamond Labs.Yorktown, Virginia 23691 Adelph, Md. 20783
Commanding Officer Defense Technical InformationNaval Air Rework Facility CenterAttn: Jim Leland 1 Cameron StationNaval Air Station Alexandria, VA 22314 12North IslandSan Diego, California 92135
13
Nbw.NSwcfw).SwO/1 (Rev. 5.71)
TO AID IN UPDATING THE DISTRIBUTION LISTFOR NAVAL SURFACE WEAPONS CENTER, WHITE
* OAK TECHNICAL REPORTS PLEASE COMPLETE THEFORM BELOW-
TOALLHOLDERSOF NSWC/TR 80-325by John M. Vranish, Code ElA
DO NOT RETURN THIS FORM IF ALL INFORMATION IS CURRENT
A. FACILITY MAMIE AND ADDRESS (OLD) (Show Zip Cod*)
NEW AONESS (Show Zip Code)
8. ATTENTION LINE ADDRESSES:
C.
SREMOVE THIS FACILITY FROM THE DISTRIBUTION LoS? FOR TECHNICAL REPORTS ON THIS SUBJECT.
0.NUMUER oF COPIES OESIRIEO ___________________
t
DEPARTMENT OF THE NAVYNAVAL SURFACE WEAPONS CENTER
WHITE OAK, SILVER SPRING, MD. 20910 POSTAGE AND FEES PAIDDEPARTMENT OF THE NAVY
DOD 316OFFICIAL BUSINESS
PENALTY FOR PRIVATE USE, $300
COMMANDERNAVAL SURFACE WEAPONS CENTERWHITE OAK, SILVER SPRING, MARYLAND 20910
ATTENTION: CODE ElA