Differentiable Bayes Filters - Stanford University
29
Differentiable Bayes Filters Lecture 9
Transcript of Differentiable Bayes Filters - Stanford University

Differentiable Bayes Filters
Lecture 9

Announcement
- Feedback for Project proposal latest on Wednesday night
- Kevin Zakka started course notes (see Piazza) - bonus points for contributing

What will you take home today?
Recap Bayesian Filters
Kalman Filter
Extended Kalman Filter
Particle Filter
Differentiable Filters
Backpropagation through a Kalman Filter
Backpropagation through a Particle Filter
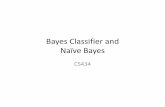
Recap Bayes Filters
xt�1 xt xt+1
zt+1zt�1 zt
utut�1 ut+1

Kalman Filter

Kalman Filter
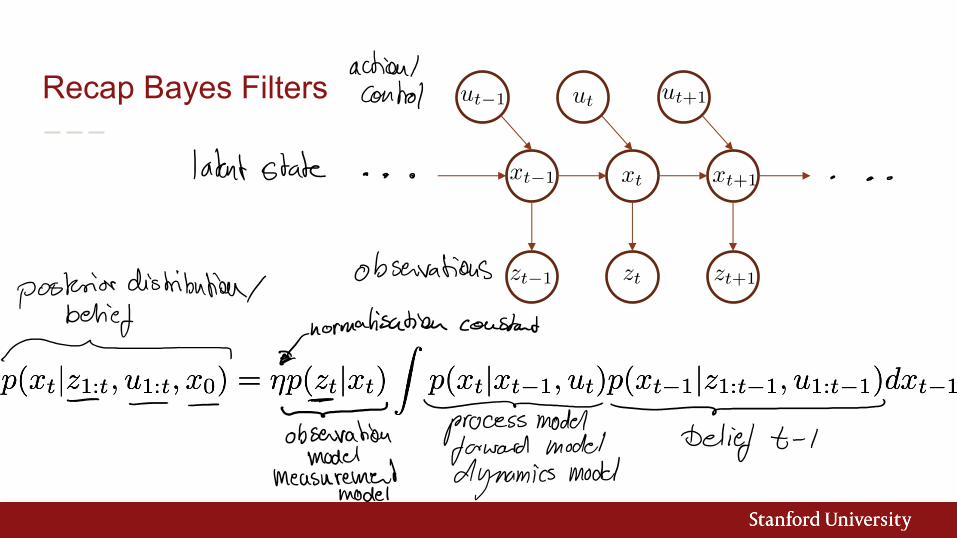
Extended Kalman Filter
Prediction Step: Update Step:
x̂t = Axt�1 +But (1)
P̂t = APt�1AT +Qt (2)
it = zt �Hx̂t (3)
Kt =P̂tH
T
HP̂tHT +Rt
(4)
xt = x̂t +Ktit (5)
Pt = (In �KtH)P̂t (6)

Particle Filter

Particle Filter

When to use what? How to choose hyperparameters?

Priors and Hyperparameters
A lot of hardcoded knowledge!
1. State Representation
2. Models
• Forward Model• State to next state
• Action to next state• Measurement Model
3. Probabilistic Properties
• Process Noise• Measurement Noise

Differentiable filters

A note on variables
In Robotics and Control:
In Machine Learning:
In Artificial Intelligence:

BackpropKF : Learning Discriminative Deterministic State Estimators. Haarnoja et al. NeurIPS 2016
- Differentiable version of the Kalman Filter
- Uses Images as observations; learns a sensors that outputs state directly

Differentiable Kalman Filter - Structure

Differentiable Kalman Filter - Structure

Differentiable Kalman Filter – Loss Function

Differentiable Kalman Filter – Experiments and Baselines

Differentiable Kalman Filter – Experiments and Baselines
• Kitti – Visual Odometry Datatset• 22 stereo sequences with LIDAR
• 11 sequences with ground truth(GPS/IMU data)
• 11 sequences without ground truth (forevaluation)
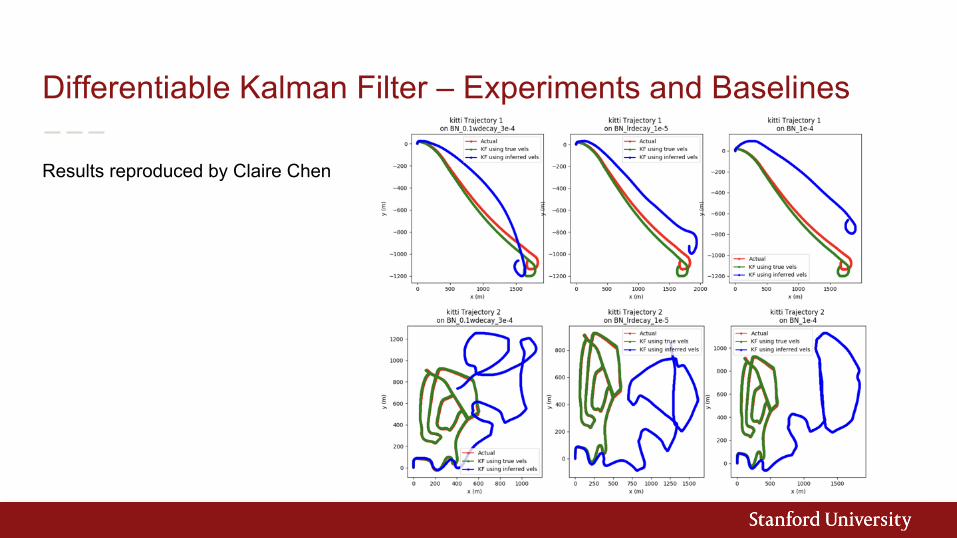
Differentiable Kalman Filter – Experiments and Baselines
Results reproduced by Claire Chen

Differentiable Particle Filters: End-to-End Learning with Algorithmic Priors. Jonschkowski et al. RSS 2018.

Differentiable Particle Filters: End-to-End Learning with Algorithmic Priors. Jonschkowski et al. RSS 2018.

Differentiable Particle Filters: End-to-End Learning with Algorithmic Priors. Jonschkowski et al. RSS 2018.

Differentiable Particle Filters: End-to-End Learning with Algorithmic Priors. Jonschkowski et al. RSS 2018.

Particle Filter Networks with Application to Visual Localization. Karkus et al. CORL 2018.

Differentiable Particle Filter – Loss Function

Differentiable Particle Filter – Experiments and Baselines
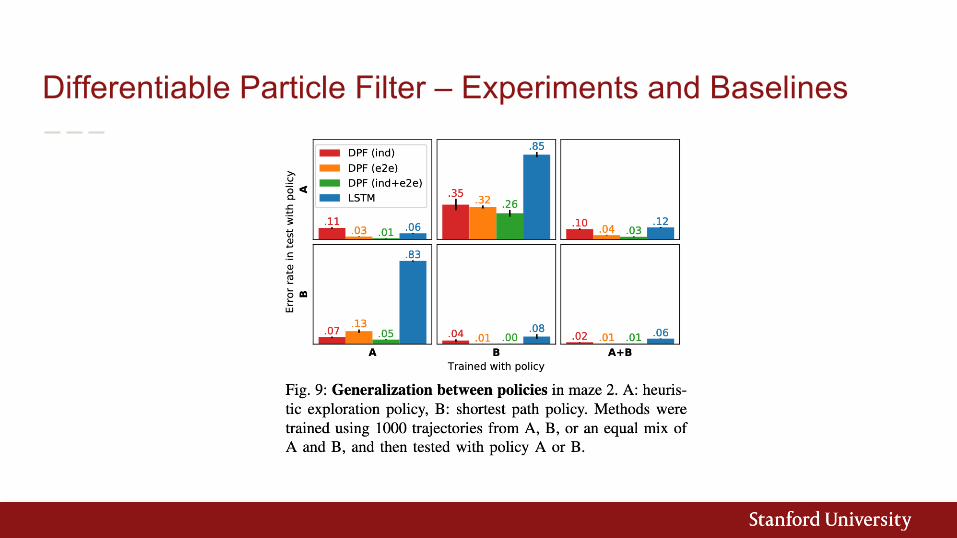
Differentiable Particle Filter – Experiments and Baselines

Differentiable Particle Filter – Experiments and Baselines








![Naïve&Bayes&Classificaon · On&Naïve&Bayes&! Text classification – Spam filtering (email classification) [Sahami et al. 1998] – Adapted by many commercial spam filters –](https://static.fdocuments.in/doc/165x107/5f5af3ea4065cd3cfc5c5f11/navebayesclassiicaon-onnavebayes-text-classification.jpg)