Design and Implementation of Process Control Strategies on ... · iii Abstract This thesis outlines...
124
i SCHOOL OF ENGINEERING AND INFORMATION TECHNOLOGY Design and Implementation of Process Control Strategies on the Universal Water System Submitted to the Murdoch University School of Engineering and Information Technology in partial fulfilment of the requirements for the degree of Bachelor of Engineering Honours Degree” by Warunthon Poonlua Bachelor of Engineering Honours [BE(Hons)] Instrumentation and Control & Industrial Computer Systems Engineering Supervisor: Associate Professor Graeme Cole Murdoch University, 2017 © Warunthon Poonlua 2017
Transcript of Design and Implementation of Process Control Strategies on ... · iii Abstract This thesis outlines...

i
SCHOOL OF ENGINEERING AND INFORMATION TECHNOLOGY
Design and Implementation of Process
Control Strategies on the Universal Water
System
Submitted to the Murdoch University School of Engineering and Information
Technology in partial fulfilment of the requirements for the degree of Bachelor of
Engineering Honours Degree”
by
Warunthon Poonlua
Bachelor of Engineering Honours [BE(Hons)] Instrumentation and Control & Industrial
Computer Systems Engineering
Supervisor: Associate Professor Graeme Cole
Murdoch University, 2017
© Warunthon Poonlua 2017

ii
Author’s Declaration
I ‘Warunthon Poonlua’ declare that this thesis is my own account of my research and contains
as its main content work, which has not previously been submitted for a degree at any tertiary
education institution.
Warunthon Poonlua

iii
Abstract
This thesis outlines the design and implementation of several control strategies for controlling
the water levels in the Murdoch University Universal Water System (UWS). The controllers were
designed using four strategies: Proportional Integral controller (PI), Generic Model Control
(GMC), Dynamic Matrix Control (DMC) and Fuzzy control. The UWS was able to operate either
as three separate sub-systems or as a single integrated system. This thesis documents the first
time that the entire plant was controlled as one system. A single-process input and single-
process output was designed and implemented in the plant.
It is more difficult to run the UWS as a single integrated system compared to running the UWS
in three separate system. The single integrated system had more inputs and outputs including
the recycles stream. Each process cause disturbances for tanks downstream. In addition, there
were system limitations such as the pump speed must be greater than 53%. The pumps and
solenoid valves will trip when the water level in the tank was too high or too low. They will also
trip if there is not enough water in the reservoir tank. However, with these difficulties come
with many advantages. The controllers of each tank are able to be tested on disturbance
rejection from inputs or outputs of different areas.
The main objectives of this thesis were to operate the plant as a single integrated system,
commission the plant, implement different control strategies using LabVIEW, and test each
controller on set-point tracking and disturbance rejections. The performance of each controller
were evaluated and compared using Integrated Squared Error, Integrated Absolute value of the
Error and Total Variation of the manipulated variable measurements. In addition, step change
tests were used to confirm that the controllers track the new set points when the set point is
changed and remains stable.
Commissioning was completed to confirm that the UWS was ready for the implementation of
the controllers. The commissioning phase included restarting the Compact RIO controller,
checking wiring connections, checking the code for errors and creating Student Templates to
run the whole plant.
The pairings between manipulated variables and process variables were found by using the
Relative Gain Array method to analyse which pairs were suitable and had no interaction
between the processes.

iv
The UWS contains five tanks. However, the level in three tanks were selected to be controlled
in this thesis. The two of these tanks were pure capacity systems. Therefore, the PI controller
was required to be tuned using a relay tuning method. The remaining tank was a first order
system therefore; the PI parameters were tuned using the approximate First-Order plus Time
Delay tuning rules. The GMC was implemented by creating a mathematical model of each
process. All physical measurements must be in SI units, therefore; conversion equations were
required. The DMC was implemented using a predictive model of the system. The Fuzzy Control
was implemented by creating a large set of rules to make decisions at each event of the process.
The results of set-point tracking and disturbance rejection of each controller showed that the PI
and GMC focused on minimising errors while the DMC and Fuzzy Control focused on minimising
the MV’s movement.
The decision for choosing the best controller was dependant on what the highest priority for
control was. The PI and GMC was selected when the set point was critical. The DMC and Fuzzy
Control was recommended when the set point was not critical but still required the process to
reach steady state. This strategy may make valves last longer and the maintenance cost of this
controller will be reduced.
Finally, all thesis objectives were completed, and the intended purpose of the Universal Water
System; to be able to implement controllers to control the UWS plant as a single integrated
system, was also achieved.

v
Acknowledgements
Firstly, I would like to thank my supervisor, Associate Professor Graeme Cole, for advising me on
this thesis. I would not have been able to complete my thesis without his support.
Moreover, I would like to thank technician Will Stirling for helping me with software and IT
issues. I also would like to thank a previous thesis student who worked on Universal Water
System, Anthony Moody, for sharing his knowledge. I would like to special thank technician Mark
Burt and technician Graham Malzer for helping me with technical issues that occurred during
my thesis.
Finally, I would like to thank my family and friends for supporting and inspiring me from the start
until the end of my thesis.

vi
Table of Contents
Author’s Declaration .................................................................................................................... ii
Abstract ........................................................................................................................................iii
Acknowledgements ...................................................................................................................... v
Table of Contents ......................................................................................................................... vi
List of Figures ............................................................................................................................... ix
List of Tables ................................................................................................................................. xi
List of Equations .......................................................................................................................... xii
List of Abbreviations ................................................................................................................... xiii
Chapter 1 Introduction ......................................................................................................... xv
Chapter 2 Project Overview ................................................................................................... 1
2.1 Previous Work ....................................................................................................... 1
2.2 Literature Review .................................................................................................. 2
2.2.1 Relative Gain Array................................................................................................ 2
2.2.1.1 RGA Calculation ............................................................................................. 3
2.2.1.2 RGA Discussion .............................................................................................. 4
2.2.2 Proportional Integral Controller............................................................................ 5
2.2.2.1 PI Controller Discussion ................................................................................. 6
2.2.3 Generic Model Control (GMC) .............................................................................. 6
2.2.3.1 GMC Discussion ............................................................................................. 8
2.2.3.2 Dynamic Matrix Control ................................................................................ 8
2.2.3.3 DMC Discussion ............................................................................................. 9
2.2.4 Fuzzy Logic Control .............................................................................................. 10
2.2.4.1 Fuzzy Logic Control Discussion .................................................................... 10
Chapter 3 Commissioning .................................................................................................... 11
Chapter 4 Plant Design ........................................................................................................ 15
Chapter 5 Control Loop Selection Using RGA ...................................................................... 20
5.1 LT03 ..................................................................................................................... 20
5.1.1 LT03 vs PU01 ....................................................................................................... 21
5.1.2 LT03 vs FV01 ........................................................................................................ 21
5.1.3 LT03 vs PU05 ....................................................................................................... 22
5.1.4 LT03 vs FV03 ........................................................................................................ 23
5.2 LT05 ..................................................................................................................... 23
5.2.1 LT05 vs PU05 ....................................................................................................... 24

vii
5.2.2 LT05 vs FV03 ........................................................................................................ 24
5.2.3 LT05 vs PU03 ....................................................................................................... 25
5.2.4 LT05 vs FV02 ........................................................................................................ 26
5.3 LT02 ..................................................................................................................... 26
5.3.1 LT02 vs PU03 ....................................................................................................... 27
5.3.2 LT02 vs FV02 ........................................................................................................ 27
Chapter 6 Process Control Strategies implementation ....................................................... 31
6.1 Proportional Integral (PI) Implementation ......................................................... 31
6.1.1 LT03 ..................................................................................................................... 32
6.1.2 LT05 ..................................................................................................................... 33
6.1.3 LT02 ..................................................................................................................... 34
6.2 Generic Model Control Implementation ............................................................. 35
6.2.1 GMC: LT03 ........................................................................................................... 35
6.2.1.1 GMC: LT03 Model ........................................................................................ 36
6.2.1.2 GMC: LT03 K1, K2 and Tau .......................................................................... 39
6.2.1.3 GMC: LT03 Filter .......................................................................................... 39
6.2.2 GMC:LT05 ............................................................................................................ 40
6.2.2.1 GMC: LT05 K1, K2 and Tau .......................................................................... 42
6.2.3 GMC:LT02 ............................................................................................................ 43
6.2.3.1 GMC: LT05 K1, K2 and Tau .......................................................................... 45
6.3 Dynamic Matrix Control (DMC) ........................................................................... 46
6.3.1 DMC:LT03 ............................................................................................................ 47
6.3.2 DMC:LT05 ............................................................................................................ 48
6.3.3 DMC:LT02 ............................................................................................................ 49
6.1 Fuzzy Control ....................................................................................................... 50
6.1.1 Error Input ........................................................................................................... 50
6.1.2 Rate of Change of Water Level Input .................................................................. 51
6.1.2.1 LT03 ............................................................................................................. 52
6.1.2.2 LT05 ............................................................................................................. 53
6.1.2.3 LT02 ............................................................................................................. 55
6.1.3 Fuzzy MV ............................................................................................................. 57
6.1.3.1 LT03 ............................................................................................................. 57
6.1.3.2 LT05 and LT02 .............................................................................................. 58
6.1.4 Fuzzy Rules .......................................................................................................... 59
Chapter 7 Performances Evaluation and Comparison ......................................................... 61
7.1 LT03 ..................................................................................................................... 61
7.1.1 Set-point Tracking at 50% ................................................................................... 61

viii
7.1.2 Step Change Test of LT03 .................................................................................... 62
7.1.2.1 Step Up from 50% to 60% ........................................................................... 63
7.1.2.2 Step Down from 60% to 50% ...................................................................... 64
7.2 LT05 ..................................................................................................................... 66
7.2.1 Set point tracking at 60% .................................................................................... 66
7.2.2 Step Change ........................................................................................................ 68
7.2.2.1 Step up from 60% to 70% ............................................................................ 68
7.2.2.2 Step Down from 70%-60%........................................................................... 69
7.3 LT02 ..................................................................................................................... 70
7.3.1 Set-point Tracking at 50% ................................................................................... 70
7.3.2 Step Change ........................................................................................................ 72
7.3.2.1 Step Up from 50%-60% ............................................................................... 72
7.3.2.2 Step Down from 60% to 50% ...................................................................... 74
7.4 Overall Conclusion .............................................................................................. 75
Chapter 8 Disturbance Rejection ......................................................................................... 76
8.1 PU01 Disturbance Results ................................................................................... 77
8.2 FV03 Disturbance Results.................................................................................... 80
8.3 PU03 Disturbance Results ................................................................................... 83
8.4 PU08 Disturbance Results ................................................................................... 86
Chapter 9 Discussion ............................................................................................................ 89
Chapter 10 Future Work ........................................................................................................ 90
10.1 Program disconnection from the Plant ............................................................... 90
10.2 Hyper-trending Fault ........................................................................................... 91
10.3 The Low Level Alarms Design Fault ..................................................................... 91
10.4 Supply Tank Water Level Indicators .................................................................... 92
10.5 Pump9 Fault ........................................................................................................ 92
10.6 Overwriting from the Student Program .............................................................. 92
10.7 Redesign a New Process within the Plant ........................................................... 93
Chapter 11 Conclusion ........................................................................................................... 94
Bibliography ............................................................................................................................... 95
Appendix A RGA Possibilities .................................................................................................. 96
Appendix B Relay Tuning Code ............................................................................................... 97
Appendix C Conversion Equations ......................................................................................... 98
Appendix D A matrix ............................................................................................................. 102

ix
List of Figures
Figure 2-1 Trajectory Response (Lee, Newell, and Cameron 1998) ............................................. 7
Figure 3-1 VSDs .......................................................................................................................... 11
Figure 3-2 FV01 Signal Disconnection ........................................................................................ 11
Figure 3-3 Broken Solenoid Valve .............................................................................................. 12
Figure 3-4 FV02 .......................................................................................................................... 12
Figure 3-5 Hyper Trending Fault................................................................................................. 12
Figure 3-6 Hyper Trending Trace Path ....................................................................................... 13
Figure 3-7 Controller Template .................................................................................................. 14
Figure 4-1 Overall Diagram of UWS (Moody 2016) .................................................................... 16
Figure 4-2 Single Integrated System Diagram ............................................................................ 18
Figure 5-1 LT03 VS PU01 Transfer Function ............................................................................... 21
Figure 5-2 LT03 vs FV01 Transfer Function ................................................................................ 21
Figure 5-3 LT03 vs PU05 Transfer Function ................................................................................ 22
Figure 5-4 LT03 vs FV03 Transfer Function ................................................................................ 23
Figure 5-5 LT05 vs PU05 Transfer Function ................................................................................ 24
Figure 5-6 LT05 vs FV03 Transfer Function ................................................................................ 24
Figure 5-7 LT05 vs PU03 Transfer Function ................................................................................ 25
Figure 5-8 LT05 vs FV02 Transfer Function ................................................................................ 26
Figure 5-9 LT02 vs PU03 Transfer Function ................................................................................ 27
Figure 5-10 LT02 vs FV02 Transfer Function .............................................................................. 27
Figure 5-11 the best-selected pairs between MVs and PVs on the UWS plant ......................... 30
Figure 6-1 LT03 Relay Tuner ....................................................................................................... 32
Figure 6-2 LT05 Relay Tuner ....................................................................................................... 33
Figure 6-3 LT02 Approximate Model.......................................................................................... 34
Figure 6-4 LT03 GMC Model....................................................................................................... 36
Figure 6-5 LT03 Approximate First Order System Model ........................................................... 39
Figure 6-6 Filter Signal ................................................................................................................ 40
Figure 6-7 LT05 GMC Model....................................................................................................... 41
Figure 6-8 LT05 Approximate First Order System Model ........................................................... 42
Figure 6-9 LT02 GMC Model....................................................................................................... 43
Figure 6-10 C Value for LT02 ...................................................................................................... 45
Figure 6-11 Approximate Model of LT02 ................................................................................... 46
Figure 6-12 Pure Capacity System Response ............................................................................. 47
Figure 6-13 DMC LT03 Model ..................................................................................................... 47
Figure 6-14 DMC LT05 Model ..................................................................................................... 48

x
Figure 6-15 DMC LT02 Model ..................................................................................................... 49
Figure 6-16 Fuzzy Error Input ..................................................................................................... 51
Figure 6-17 The Rate of Increase of Water Level in the LT03 .................................................... 52
Figure 6-18 The Rate of decrease of Water Level in the LT03 ................................................... 52
Figure 6-19 LT03 Derivative of the Water Level ......................................................................... 53
Figure 6-20 The Rate of Increase of Water Level in the LT05 .................................................... 54
Figure 6-21 The Rate of decrease of Water Level in the LT05 ................................................... 54
Figure 6-22 LT05 Derivative of the Water Level ......................................................................... 54
Figure 6-23 The Rate of Increase of Water Level in the LT02 .................................................... 55
Figure 6-24 The Rate of Decrease of Water Level in the LT02 ................................................... 56
Figure 6-25 LT02 Derivative of the Water Level ......................................................................... 56
Figure 6-26 MV Changing LT03 .................................................................................................. 57
Figure 6-27 MV Changing LT05 and LT02 ................................................................................... 58
Figure 7-1 Set-point Tracking Tests of LT03 ............................................................................... 61
Figure 7-2 Step Up Tests of LT03 ................................................................................................ 63
Figure 7-3 Step Down Tests of LT03 ........................................................................................... 65
Figure 7-4 Set-point Tracking Tests of LT05 ............................................................................... 67
Figure 7-5 Step Up Tests of LT05 ................................................................................................ 68
Figure 7-6 Step Down Tests of LT05 ........................................................................................... 69
Figure 7-7 Set-point Tracking of LT02 ........................................................................................ 71
Figure 7-8 Step Up LT02 ............................................................................................................. 72
Figure 7-9 Step Down LT02 ........................................................................................................ 74
Figure 8-1 Disturbances ............................................................................................................. 76
Figure 8-2 PU01 Disturbance Results ......................................................................................... 77
Figure 8-3 FV03 Disturbance Results.......................................................................................... 80
Figure 8-4 PU03 Disturbance Results ......................................................................................... 83
Figure 8-5 PU08 Disturbance Results ......................................................................................... 86
Figure 10-1 Access Level Requested and Student Program Global Variable ............................. 90
Figure 10-2 Project Explorer ....................................................................................................... 90
Figure 10-3 The Low Level Alarms Design Fault ......................................................................... 91
Figure 10-4 The Low Level Alarms Solutions .............................................................................. 92

xi
List of Tables
Table 2-1 Ziegler- Nichols Stability Margin Controller Tuning Rules Table (Ogunnaike and Ray 1994) .............................................................................................................. 5
Table 2-2 Ziegler-Nichols Approximate Model PID Tuning Rules (Ogunnaike and Ray 1994) ..................................................................................................................... 6
Table 5-1 Transfer Function Matrix for UWS ............................................................................. 28
Table 5-2 Steady State Gain Matrix ............................................................................................ 29
Table 5-3 PU01, FV03 and PU05 Fixed ....................................................................................... 29
Table 5-4 the Best Selected Pairs ............................................................................................... 30
Table 6-1 PI Parameters of LT03 ................................................................................................ 32
Table 6-2 PI Parameters of LT05 ................................................................................................ 33
Table 6-3 PI Parameters of LT02 ................................................................................................ 34
Table 7-1 ISE, IAE and TV Table of Set-point Tracking LT03 ....................................................... 62
Table 7-2 ISE, IAE and TV Table of Step Up Test LT03 ................................................................ 64
Table 7-3 ISE, IAE and TV Table of Step Down Test LT03 ........................................................... 66
Table 7-4 ISE, IAE and TV Table of Set-point Tracking LT05 ....................................................... 67
Table 7-5 ISE, IAE and TV Table of Step Up LT05........................................................................ 69
Table 7-6 ISE, IAE and TV Table of Step Down LT05 ................................................................... 70
Table 7-7 ISE, IAE and TV Table of Set-point Tracking of LT02 .................................................. 71
Table 7-8 ISE, IAE and TV Table of Step Up of LT02 ................................................................... 73
Table 7-9 ISE, IAE and TV Table of Step Down of LT02 .............................................................. 75
Table 8-1 LT03 Performance Measurement when PU01 is a Disturbance ................................ 78
Table 8-2 LT05 Performance Measurement when PU01 is a Disturbance ................................ 78
Table 8-3 LT02 Performance Measurement when PU01 is a Disturbance ................................ 79
Table 8-4 LT03 Performance Measurement when FV03 is a Disturbance ................................. 81
Table 8-5 LT05 Performance Measurement when FV03 is a Disturbance ................................. 81
Table 8-6 LT02 Performance Measurement when FV03 is a Disturbance ................................. 82
Table 8-7 LT03 Performance Measurement when PU03 is a Disturbance ................................ 84
Table 8-8 LT05 Performance Measurement when PU03 is a Disturbance ................................ 84
Table 8-9 LT02 Performance Measurement when PU03 is a Disturbance ................................ 85
Table 8-10 LT03 Performance Measurement when PU08 is a Disturbance ............................. 87
Table 8-11 LT05 Performance Measurement when PU08 is a Disturbance .............................. 87
Table 8-12 LT02 Performance Measurement when PU08 is a Disturbance .............................. 88

xii
List of Equations
Equation 2-1 Process Model (Seborg et al. 2010) ........................................................................ 3
Equation 2-2 Process Model Matrix (Seborg et al. 2010) ............................................................ 3
Equation 2-3 Relative Gain (Seborg et al. 2010) .......................................................................... 3
Equation 2-4 Relative Gain Matrix (Seborg et al. 2010) ............................................................... 3
Equation 2-5 PI algorithm (Ogunnaike and Ray 1994) ................................................................. 5
Equation 2-6 GMC Algorithm (Lee, Newell, and Cameron 1998) ................................................ 7
Equation 2-7 GMC Tuning Parameters (Lee, Newell, and Cameron 1998) .................................. 7
Equation 2-8 DMC Algorithm (Bahri 2017) .................................................................................. 8
Equation 2-9 Predicted Error Matrix (Bahri 2017) ....................................................................... 9
Equation 2-10 S Matrix (Bahri 2017) ............................................................................................ 9
Equation 2-11 P Matrix (Bahri 2017) ............................................................................................ 9
Equation 5-1 The Rectangular Pulse Response Equation (Ogunnaike and Ray 1994) ............... 20
Equation 5-2 RGA Matrix (Seborg et al. 2010) ........................................................................... 29
Equation 6-1 Integral Equation (mathcentre 2009) ................................................................... 38
Equation 6-2 Digital Filter Equation (Ogunnaike and Ray 1994) ............................................... 39
Equation 6-3 DMC algorithm (Bahri 2017) ................................................................................. 46

xiii
List of Abbreviations
DMC Dynamic Matrix Control
GMC Generic Model Control
PI Proportional Integral Controller
cRIO Compact RIO
MV Manipulated Variable
PV Process Variable
DV Disturbance Variable
LabVIEW Laboratory Virtual Instrument Engineering Workbench
MISO Multiple-Input Single-Output
FV Flow Valve Identifier
PU Pump Identifier
SP Set point
SV Solenoid Valve Identifier
TF Transfer Function
FOS First Order System
UWS Universal Water System
VSD Variable Speed Drive
K Gain
Ti Time Integral
RGA Relative Gain Array
LT Level Transmitter


xv
Chapter 1 Introduction
The Murdoch University Universal Water System (UWS) was constructed to allow greater
numbers of process control engineering students to apply their knowledge to real instruments
and processes (Blay 2010). This water system is able to operate as one single system or three
separate sub-systems (Moody 2016). The special feature about the UWS is that the water is
recirculated from the reservoir tank to the process then drains back to the reservoir tank again.
It does not require an external water supply during normal operation. Also, interacting and non-
interacting systems can be implemented in the UWS by using manual valves.
Currently, the communications systems and UWS’ functions have been completed. The UWS
system is sufficient to enable the design of process controllers to control water level and flow in
the plant.
The objectives of this thesis are to implement Proportional Integral Control, Generic Model
Control, Dynamic Matrix Control, and Fuzzy Control to control water levels in the UWS. Also, to
compare and evaluate the performance of each control strategy using control performance
indicator methods. This thesis will describe the methods used to design plant wide control
strategies, present and analyse the results, then finally propose possible future works for the
UWS.

1
Chapter 2 Project Overview
This chapter will describe the previous work on the UWS over the past 10 years. Also, the
control scheme will be explained in detail. The discussion of each control scheme will be
provided. It explains how this thesis will be different from previous works to improve the
performances of UWS control.
2.1 Previous Work
Besides the Pilot Plant, the UWS is one of the processing plants belonging to Murdoch University.
It was built to support engineering students applying their theoretical knowledge to the control
of a real plant. Students can practice with programming logic controllers, instrument
calibrations, networking, applying control strategies, etc. The UWS is a recirculated water
system. The water will be pumped from a reservoir tank through the process then drain back to
the reservoir tank again. The entire UWS system diagram is shown in Figure 4-1.
The UWS was relocated from Rockingham Campus to South Street Campus Murdoch University
in 2008 (Sheppard 2009). In 2009, Justin Sheppard planned to complete the construction and
commissioning of the plant (Sheppard 2009). However, the project objective was not achieved
because procurement of additional materials was required.
In 2010, Richard Jonosz completed the hardware commissioning, calibration, and
instrumentation of the UWS (Janosz 2010). In parallel, Kane Blay was working on the
construction of Compact RIO and Labview communication to send the signals to the hardware
(Blay 2010). The result of this thesis was the successful communication between the hardware
and Labview. Kane Blay also created the Client Program to act as the Human Machine Interface
(HMI) of the whole plant (Blay 2010). The HMI could display trending, alarms, and abnormal
situations. Also, the interlocks were built in the Client Program for safe operation purpose (Blay
2010).
In 2012, Jagadeesh Ganesan was responsible for a standard maintenance program and
controller implementation. The Fuzzy Logic Controller and Generic Model Controller were used
for controlling the water levels in three separate and isolated tanks. Jagadeesh Ganesan did not
attempt to control the plant as a single integrated system. Fuzzy control was attempted to
control the water level in the tank; however, it did not work correctly. The result of Fuzzy control
implementation was that the MV was overly aggressive, and the behaviour of the process

2
variable was abnormal. The results showed that the GMC was the best controller (Ganesan
2012).
Following the work from Ganesan, in 2014 Arash Tokhmechi tested and re-calibrated all flow
and level transmitters of the whole plant to eliminate hardware and software issues (Tokhmechi
2014). The two MacNaught flow transmitters were found to be faulty. Therefore, they were
removed from the system. This problem led Tokhmechi to deleted the MacNought flow
transmitters code from the original Client Program. The program was also changed by removing
the pump interlocks. If MacNought flow transmitters were to be reinstalled in future, then the
original client program could be used (Tokhmechi 2014).
In 2015, Ben Cole successfully implemented a PROFIBUS communication network into the UWS
(Cole 2015). The cRIO code was also upgraded to be more efficient (Cole 2015). Moreover, the
faulty MacNaught flow transmitters were replaced by PROFIBUS flowmeters. The VSDs were re-
wired to be controlled by a gateway via the PROFIBUS network as well (Cole 2015).
In 2016, Anthony Moody upgraded the communication and operation of the UWS. The cRIO was
confirmed to send and read signals to and from the instruments accurately. In this stage, the
system was able to communicate with multiple clients simultaneously with adequate
interlocking for safe operation (Moody 2016). The Automatic Operation Program was
implemented to demonstrate the UWS capabilities by pressing the automatic button. In
addition, the Student Program was created. This was a benefit to students to design and develop
their controller codes without disrupting the system code (Moody 2016).
2.2 Literature Review
2.2.1 Relative Gain Array
The Relative Gain Array (RGA) is a method to find the suitable pairings between manipulated
variables and process variables. The steady-state information is required to calculate the
interaction between the processes. Then, the relative gain array results can be analysed to find
which is the most effective pairs (Seborg et al. 2010).

3
2.2.1.1 RGA Calculation
As mentioned above, the steady-state information is required. The steady-state gain can be
found from real steady-state process data or calculated from the process model (Seborg et al.
2010).
For example, the process model was given
𝑦1 = 𝐾11𝑢1 + 𝐾12𝑢2
𝑦2 = 𝐾21𝑢1 + 𝐾22𝑢2
Equation 2-1 Process Model (Seborg et al. 2010)
Note : y is the process variable.
u is the manipulated variable.
K is the steady-state gain. In another case, if the dynamic model is given, the Final-Value
Theorem will be applied (Seborg et al. 2010).
The process model equation can be re-written in a 2x2 matrix as follows:
𝑢1 𝑢2
𝑦1
𝑦2[𝐾11 𝐾12
𝐾21 𝐾22]
Equation 2-2 Process Model Matrix (Seborg et al. 2010)
Next step is to calculate the relative gain (𝜆) by using the equation below:
𝜆11 =1
1 −𝐾12𝐾21𝐾11𝐾22
Equation 2-3 Relative Gain (Seborg et al. 2010)
The relative gain matrix is cretaed by calculating the sum of each row and column. The sum of
each row and column must be equal to one (Seborg et al. 2010).
𝑢1 𝑢2
Λ = 𝑦1𝑦2
[ 𝜆 1 − 𝜆1 − 𝜆 𝜆
]
Equation 2-4 Relative Gain Matrix (Seborg et al. 2010)
This matrix will provide the measurement of interaction between the processes. The values of
elements can be divided into five cases.
1) If the element in the matrix is equal to one, this means there is no interaction between
two systems and the manipulated variable directly effects the process variable (Seborg
et al. 2010).

4
2) If the element in the matrix is equal to zero, this means there is no direct effect between
the manipulated variable and process variable (Seborg et al. 2010).
3) If the element is less than one but greater than zero, this means there is an interaction
between two systems. The worst case of system interaction is when the element in the
matrix is equal to 0.5 (Seborg et al. 2010).
4) If the element in the matrix is greater than one, this means there is an interaction
between two systems. This interaction will become more severe as the relative gain
value becomes larger. When the relative gain value is very high, the systems cannot be
controlled seperately because they will interfere with each other (Seborg et al. 2010).
5) If the element in the matrix is less than zero and this pair is chosen, the system will
become unstable (Seborg et al. 2010).
Therefore, the best pairings can be selected by two conditions.
1) The relative gain value must be positive
2) The relative gain value should be as close to one as possible (Seborg et al. 2010).
2.2.1.2 RGA Discussion
Research shows that Ganesan (2012) chose suitable pairs empirically. The results showed that
the GMC was considered to be the best control strategy. From the analysis, the GMC control
was considered to behave similarly to a feedforward control by including disturbances in the
controller model. When a modelled disturbance occurred in the system, the controller
eliminated it faster than the other tested controllers were able.
The reason why the other controllers gave poorer control performances might have resulted
from choosing interacting pairs. Therefore, RGA will be applied in this plantwide control project.
Since the RGA is a theoretical method to find suitable pairs by measuring the interactions in the
system, therefore the chosen pairs will have the least interaction possible. It is expected that
RGA will provide better control outcomes than previously used empirical methods.
Another reason for the use of RGA is that Ganesan (2012) controlled the plant very differently
from this thesis. Ganesan’s plant was divided into three separate sub-systems. Therefore, the
manipulated variables in one area was not considered to control the process variables in one of
the other areas. On the other hand, this thesis will connect all three areas together to control
the UWS as a single integrated system for plant-wide control. Consequently, all manipulated
variables will be considered for each of the process variables even though they are located in
different areas.

5
2.2.2 Proportional Integral Controller
The proportional Integral Controller is one of the feedback controllers. This type of controller is
able to eliminate the off-set at steady state (Ogunnaike and Ray 1994). However, overshoot and
oscillation will occur before the process reaches steady- state because the PI controller cannot
predict the future error (Temel 2013). Therefore, the speed of the response will be slow to reach
the setpoint.
This is the PI algorithm:
𝑢(𝑡) = 𝐾𝑐[휀(𝑡) +1
𝜏𝐼∫ 휀(𝑡)𝑑𝑡] + 𝑢(𝑡 − 1)
Equation 2-5 PI algorithm (Ogunnaike and Ray 1994)
There are two tuning parameters which are 𝐾𝑐 and 𝜏𝐼. They can be tuned by using Ziegler-
Nichols Stability Margin Controller Tuning Parameters (Ogunnaike and Ray 1994)which are
shown in Table 2-1.
Table 2-1 Ziegler- Nichols Stability Margin Controller Tuning Rules Table (Ogunnaike and Ray 1994)
Controller Type 𝑲𝒄 𝝉𝑰 𝝉𝑫
P 0.5𝐾𝑐𝑢 - -
PI 0.45𝐾𝑐𝑢 𝑃𝑢/1.2 -
PID 0.6𝐾𝑐𝑢 𝑃𝑢/2 𝑃𝑢/8
Note: 𝐾𝑐𝑢 is ultimate controller gain.
𝑃𝑢 is ultimate period of oscillation
𝐾𝑐𝑢 and 𝑃𝑢 values can be found by controlling the system with P-only controller and increasing
the gain until it causes the system to be on the verge of instability. The other way is to use the
Relay tuning method to get 𝐾𝑐𝑢 and 𝑃𝑢 values.
Another way to tune 𝐾𝑐 and 𝜏𝐼 values is by using the first order system plus time delay
approximate model of the system. After receiving all required parameters, then the 𝐾𝑐 and 𝜏𝐼
values can be calculated by using the Ziegler-Nichols Approximate Model PID Tuning Rules Table
as provided in Table 2-2:

6
Table 2-2 Ziegler-Nichols Approximate Model PID Tuning Rules (Ogunnaike and Ray 1994)
Controller type KC TI TD
P 1
𝑘(
𝜏
𝛼)
- -
PI 0.9
𝑘(
𝜏
𝛼)
3.33𝛼 -
PID 1.2
𝑘(
𝜏
𝛼)
2.0𝛼 0.5𝛼
Where k is a gain values of a process
𝜏 is a time constant of a process
𝛼 is a time delay of a process
2.2.2.1 PI Controller Discussion
According to research, the PI controller was implemented by Moody (2016). However, the plant
was separated into three sub-systems which were isolated in Area A, Area B and Area C. Each
controller was tested on disturbance rejection only within each Area. For example, there are
two inputs in Area A. Therefore, one MVs was chosen to be the MV, one would be chosen to be
DV. The outside variables of the Area were not chosen to be DVs.
For this thesis, the plant is operated as a single system. Therefore, disturbance rejection testing
can be completed on each individual tank and the whole interconnected system. The whole
interconnected system disturbance rejection testing can determine each control strategy’s
capability for plant-wide control of the UWS.
2.2.3 Generic Model Control (GMC)
GMC is one of the model-based approaches which developed by Lee and Sullivan in 1988 (Lee,
Newell, and Cameron 1998). This method uses the nonlinear mathematical model of the process
to develop the controller algorithm. This controller will control the process variables to follow
the desired trajectory.

7
In UWS Plant, there is only water level that can be controlled. To use a GMC controller to control
water level, mathematical modelling of each tank will be required. The mass balance of each
tank will include the actual mass or volumetric flow rate into and out of the tank. Also, the
conversions between the actual flow rate and percentage of the operating point on the UWS
HMI are necessary.
The GMC algorithm is as follows:
𝑓(𝑦, 𝑢) = 𝐾1휀(𝑡) + 𝐾2 ∫ 휀(𝑡)𝑑𝑡𝑡
0
Equation 2-6 GMC Algorithm (Lee, Newell, and Cameron 1998)
Note: 𝑓(𝑦, 𝑢) is approximate model of the process.
There are two tuning parameters which are 𝐾1 and 𝐾2. They can be tuned by using the following
equations:
𝐾1 =2 ∗ 휁
𝜏
𝐾2 =1
𝜏2
휁 is the trajectory of desired response.
𝜏 is the time constant of the system.
Equation 2-7 GMC Tuning Parameters (Lee, Newell, and Cameron 1998)
The value of 휁 can be specified depending on the trajectory of desired response as shown in
Figure 2-1.
Figure 2-1 Trajectory Response (Lee, Newell, and Cameron 1998)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 5 10 15 20 25 30 35
Mo
rmal
ized
Res
po
nse
(y/
yd)
Normalized Time (t/T)
Trajectory Response
Zeta =0.05 Zeta =0.1 Zeta =0.5

8
The Figure 2-1 shows the different zeta (휁 ) values provide the different trajectory of the
process. The Simulink simulation is generated by following the procedure of Process control
and management (Lee, Newell, and Cameron 1998)
2.2.3.1 GMC Discussion
Previously GMC controllers were implemented on the Universal Water System by Jagadeesh
Ganesan in 2012 and Anthony Moody in 2016. Their systems were divided into three sub-
systems. Jagadeesh Ganesan was able to test controllers in Area A and B but not Area C because
of a hardware issue. The result showed that GMC was considered to be the best controller. In
2016, Anthony Moody analysed the mathematical models of three separate, non-
interconnected areas. The valve coefficient value calculated was not constant for different
heights within the same system. The method to get the valve coefficient value can be improved
to get more accurate models by taking repeated measurements between tank height and outlet
flow. The height measurements must be taken with respect to where the water reaches the
atmosphere, not the bottom of the tank.
Furthermore, the UWS plant is a single integrated system for this thesis. Therefore, the previous
mathematical models could not be used. For example, the globe valves, which connect to the
supply tank, will be closed. There is only one input from the supply tank, water flows through all
interconnected tanks to a single outlet to return to the supply tank. Consequently, the mass
balance equations are different to those previously used.
2.2.3.2 Dynamic Matrix Control
The Dynamic Matrix Control (DMC) is a model predictive controller. The change of the
manipulated variable depends on predictions of the future change of the process variable (Liptak
2005).
This is the DMC algorithm:
Δ𝑚 = (𝐴𝑇𝑊1𝐴 + 𝑊2)𝐴𝑇𝑊1𝐸′̂ = 𝐾𝑐𝐸′̂
Equation 2-8 DMC Algorithm (Bahri 2017)
There are two weighting factors which are 𝑊1 and 𝑊2.The difference of ratios between 𝑊1 and
𝑊2 will cause a difference in responses. The process response can speed up by increasing the
𝑊1 value. However, this will cause the controller to become more aggressive. On the other hand,
when increasing the 𝑊2value, the controller becomes less aggressive (Liptak 2005).

9
The DMC algorithm requires an A-matrix of step coefficients and a predicted error matrix 𝐸′̂ to
calculate the current manipulated variable value. The A-matrix can be calculated by analysing
the step response or mathematical model of the system (Bahri 2017).
The predicted error matrix can be calculated from:
𝐸′̂ = �̂� − 𝑃
�̂� = 𝑠𝑝 − 𝑝𝑣
Equation 2-9 Predicted Error Matrix (Bahri 2017)
The h matrix can be calculated from the difference of consecutive PV samples (Bahri 2017).
The S matrix is the sum of the h matrix multiplied with the previous change in manipulated
variable value (Bahri 2017):
𝑆𝑗 = ∑ ℎ𝑖Δ𝑚𝑛+𝑗−𝑖
𝑇
𝑖=𝑗+1
Equation 2-10 S Matrix (Bahri 2017)
The P matrix can be calculated by summing up of the S matrix (Bahri 2017):
𝑃 = ∑ 𝑆𝑗
𝑖
𝑗=1
Equation 2-11 P Matrix (Bahri 2017)
2.2.3.3 DMC Discussion
Moody (2016) designed DMC code using Lab-view. However, the design and results of this
controller have not been published. Therefore, this thesis will be able to expand this work to
produce new data corresponding to DMC control performance and compare it with different
controllers to decide which strategy is the most effective.
The best ratio between DMC weighting factors will be investigated by conducting experiments.
The best ratio will be tested with set-point tracking, stepping change and disturbance rejection
testing.

10
2.2.4 Fuzzy Logic Control
Fuzzy control is a control approach based on Fuzzy logic. It uses a set of rules to make decisions
The Fuzzy controller requires reference inputs to analyse the MV values for the process. For a
level controller, the reference inputs of the system will be error and rate of change of the water
level. The Fuzzy controller will consider the given inputs compare with the set of rules then
selecting the appropriate MV changes (Passino and Yurkovich 1998). Advantages of the Fuzzy
Control are:
1) The fuzzy Control does not require advance mathematical knowledge. It can be
implemented with plain language instructions (Ghanea-Hercock 2003).
2) The models of the processes are not necessary (Ghanea-Hercock 2003).
3) The Fuzzy Control can be implemented on both linear and non-linear systems (Ghanea-
Hercock 2003).
The LabVIEW program will be used to implement the Fuzzy Logic Controller. In the program,
there are the Fuzzy control toolkits, which allow users to create Fuzzy rules to design the
controller.
There are several ways to find the control rules:
1) The operator’s experiences and knowledge. This knowledge comes from completing a
number of experiments (Lowen and Verschoren 2007).
2) Fuzzy Modelling of the operator’s control action. This knowledge comes from
observation of the operator to work out the input-output relationship (Lowen and
Verschoren 2007).
3) Self-learning controllers (Lowen and Verschoren 2007)
2.2.4.1 Fuzzy Logic Control Discussion
Ganesan (2012) implemented Fuzzy Logic Control in the UWS. This Fuzzy Logic Control was
implemented into three separate sub-systems. Therefore, this thesis will expand this knowledge
to implement plant wide Fuzzy Control on an interconnected process. Moreover, Ganesan
reported that the manipulated variable of Fuzzy Logic Control was very aggressive and the
process was erratic. This thesis will attempt to design a stable and effective plant wide Fuzzy
Control system.

11
Chapter 3 Commissioning
The UWS’s commissioning was the first phase completed before operating the plant to confirm
that the plant was ready to implement controllers. There were many faults, which were required
to be fixed.
1) As the UWS has not been operated since 2016, the VSDs and Compact RIO were
disabled. This disabled state could be caused by a power blackout during 2016-2017.
The solution to enable the VSDs and compact RIO was to restart them in the UWS server.
The manual for restarting the VSDs and compact RIO was provided in “UWS-3001
Restarting the Server & cRIO” by Moody (2016). Figure 3-1 shows the VSDs are ready to
use because the LED displays on the red VSD panels say ‘Stop’ not ‘Disable’.
2) All wiring connections within the plant were inspected. There was a signal disconnection
of FV01 because of damaged wiring as shown in Figure 3-2. Therefore, the signal
between the computer and FV01 was reconnected, and the valve was tested.
Figure 3-1 VSDs
Figure 3-2 FV01 Signal Disconnection

12
In addition, a solenoid valve was found broken as shown Figure 3-3.
The signal that the computer sent to the valve was verified; however,
there was no response back. The solenoid valve was tested by using
the multimeter for measuring the DC voltage. It was expected to
receive a 24V signal when the operator sent the command to open
the solenoid valve. Also, the solenoid valve was expected to receive a
0V signal when the operator sent the command to close the solenoid
valve. The voltages measured at the solenoid valve were correct but
it would not open or close itself. Therefore, it was replaced with a new
solenoid valve.
The control valve (FV02) was found to have an intermittent fault.
The instrument air tube inside the terminal box was found to be
blocked. This caused the control valve (FV02) to stop working
sometimes. To solve this problem, the overall circuit was
checked and the lid of the terminal box removed since it was a
barrier for the instrument air circuit as shown in Figure 3-4.
However, this is only a temporary solution. For a permanent
solution, the rearrangement of the instrument air tubes and
connections will be required.
Figure 3-3 Broken Solenoid Valve
Figure 3-4 FV02
Figure 3-5 Hyper Trending Fault

13
3) The Hyper-Trending in Client Program could not show the trend of the whole plant as
shown in Figure 3-5. The trend channels were connected to incorrect tags on the server,
therefore no data for instruments were displayed in the Hyper-Trending Chart. To solve
this problem, the Trace Path in Trace Properties must be connected directly to the UWS
Variable Library. The tags’ information can be changed by right-clicking to the list of
channels, choose NI Hyper-trend, then select Properties. After that select the preferred
channel, then click Edit button to choose the preferred Trace Path as shown in Figure 3-
6.
The correct trace path should look like the examples shown below:
Example1, the correct tag for FV01 is
\\UWSServer1\C__Program_Files__x86__National_Instruments_LabVIEW_2014_data\
UWSServer1\UWS Variable Library\Manipulated Variables\'FV01.MV'
Example 2 the correct tag for LI01 is
\\UWSServer1\C__Program_Files__x86__National_Instruments_LabVIEW_2014_data\
UWSServer1\UWS Variable Library\Process Variables\'LI01.PV'
Although the Hyper-trending was fixed, it was required to be removed from the Client
Program. This is because the Hyper-Trending was interrupting the Compact RIO server
Figure 3-6 Hyper Trending Trace Path

14
runtime and causing the Client program to run slower than normal. It was moved to a
new LabVIEW file, which solved this problem.
4) The Student Templates were created to operate the whole plant as shown in Figure 3-
7. There are separate Controller Templates for PI controller, GMC, DMC and Fuzzy
control. These templates also include the data logging functions and relay tuning
controllers.
Figure 3-7 Controller Template

15
Chapter 4 Plant Design
The UWS has many instruments and equipment as shown in Figure 4-1, which also shows many
possible process connections. Currently, the UWS hardware consists of five tanks in total. Four
tanks have the same cylindrical dimensions with a diameter of 60 cm and height of 97 cm. The
fifth tank is also cylindrical but the diameter of the tank is 34 cm, and the height of the tank is
640 cm. The UWS does not have a steam supply, so the only process variable which can be
controlled is water level and flow.
Moreover, there are five level indicators to show the water level in each tank. The different
types of the level indicators were installed on each tank. They are Cerabar, Liquicap M, Deltabar
S, Prosonic M and Micro Pilot M (Moody 2016). The reason for the different types of instruments
is to provide an opportunity for students to learn and understand each type of level indicators.
In addition, there are many types of valves in the plant. They are globe valves, hand valves,
solenoid valves, flow control valves and flow control valves with positioners. Also, there are
three centrifugal pumps and five positive displacement pumps in the system. The UWS Plant can
be configured to have an interacting or a non-interacting system by opening/closing the globe
valve between two connecting tanks.
The UWS can be operated as a single integrated system, or it can be separated into three sub-
systems which are Area A, Area B and Area C. In this thesis, the plant will be configured as a
single integrated system as shown in Figure 4-2.

16
Figure 4-1 Overall Diagram of UWS (Moody 2016)

17
To turn the three sub-systems into one system, the manual valves between the supply pipes and
tanks in Area B and Area C must be turned off. Only Area A can receive water from the supply
tank. This water will follow a continuous process through Area C then Area B respectively. Also,
the reservoir drain valves must be closed in Area A and Area C. The water can only return from
the UWS process tanks to the supply reservoir tank by exiting Area B as shown in Figure 4-2.
Figure 4-2 shows that there are six possible manipulated variables and five possible process
variables in the system. The two possible manipulated variables in each UWS Area are connected
to each other by one pipe. When the upper solenoid valve is opened, the water from two
manipulated variables will be pumped into the top tank. On the other hand, when the lower
solenoid is opened, the water will fall into the bottom tank. Similarly, when the upper and lower
solenoid valves are opened, the water will also fall to the bottom tank due to gravity.
To decide the process variables of each area, the following hypothesis was made:
The first condition is that when two tanks in Areas A and B are to be controlled by using two
manipulated variables, the upper solenoid valves must be opened. The water will be pumped
up to the top tank then drain to the bottom tank via SV16 and SV14 in Area A and Area B,
respectively. When applying the controllers on two tanks, the controllers will try to adjust their
manipulated variables to reach their set-points. The manipulated variables will conflict with each
other. This will cause disturbances to two systems. For this reason, this thesis will have three
process variables in the UWS which are Tank2, Tank3, and Tank5 Levels.
This thesis will show that the plant-wide control can be completed on the UWS by demonstrating
only one possible design of the plant. However, there are a number of manipulated variables,
process variables, and instruments in this plant. Therefore, the plant can be re-designed in many
different ways. For example, an interacting system can be provided by opening the globe valve
between two tanks. The advantages of creating more complex designs is to build a more
intesting process for a more challenging control implementation.

18
Red means closed valves/pumps.
Green means open valves/pumps.
Figure 4-2 Single Integrated System Diagram


20
Chapter 5 Control Loop Selection Using RGA
The RGA analysis was chosen as the method to find the best pairings between manipulated
variables and process variables. The relationships between all possible outputs and possible
inputs were modelled as transfer functions. The gains of these transfer functions were required
to find the best pairings. In the UWS plant, there were selected three process variables and six
possible manipulated variables. There was one type of process variable in this system which was
tank water level. To find the transfer function of Level Transmitter 3 (LT03) and Level Transmitter
5 (LT05), the rectangular pulse input method was used. This was because the tanks’ transfer
function represents a pure capacity system. The pure capacity system model was found using
the equation below, which provided the gain of the process:
𝑦(𝑡) − 𝑦(𝑠𝑠) = 𝐴 ∙ 𝐾 ∙ 𝑡
Equation 5-1 The Rectangular Pulse Response Equation (Ogunnaike and Ray 1994)
On the other hand, the transfer function of Level Transmitter 2 (LT02) was found by using the
approximate first order system plus time-delay strategies. This is because the Tank 2 process is
the first order system. The models between the possible manipulated variables and process
variables were provided as follows.
5.1 LT03
The water level in the LT03 was influenced by the Pump 01 (PU01), Flow Valve 01 (FV01), Pump
03 (PU03) and Flow Valve 03 (FV03). To find the transfer function for each of the different inputs,
a pulse was applied to each of PU01, FV01, PU03 and FV03 for two minutes each. The process
response was recorded then the rectangular pulse response equation was used to find the gain
of their transfer functions.

21
5.1.1 LT03 vs PU01
Figure 5-1 LT03 VS PU01 Transfer Function
Figure 5-1 shows that a pulse step from 60% to 70% of the PU01 was applied for two minutes.
The initial water level of LT03 before implementing the pulse was 59.953%. The final water
level of LT03 after two minutes was 61.903%. Therefore, the gain of this system was 0.0959.
Since the model of the tank is a pure capacity, the transfer function between LT03 and PU01
can be found by using Equation5-1, which is:
0.0959
𝑠
5.1.2 LT03 vs FV01
Figure 5-2 LT03 vs FV01 Transfer Function
0
20
40
60
80
100
0 20 40 60 80 100 120 140 160 180
Leve
l (%
)
Time (s)
LT03 vs PU01
LT03 PU01
0
20
40
60
80
100
0 50 100 150 200 250
Leve
l (%
)
Time (s)
LT03 vs FV01
LT03 FV01

22
Figure 5-2 illustrates the difference between the level in the LT03 before and after inputting
the pulse was 3.297%. The pulse of 10% was applied for two minutes. Therefore, the transfer
function of this capacity system was:
0.1635
𝑠
5.1.3 LT03 vs PU05
Figure 5-3 LT03 vs PU05 Transfer Function
Figure 5-3 illustrates that PU05 was pulsed for two minutes. The water level in LT03 was
decreased from 66.181% to 59.368%. From the calculation, the transfer function between LT03
and PU05 was:
−0.3351
𝑠
0
20
40
60
80
100
0 20 40 60 80 100 120 140 160
Leve
l (%
)
Time (s)
LT03 vs PU05
LT03 PU05

23
5.1.4 LT03 vs FV03
Figure 5-4 LT03 vs FV03 Transfer Function
Figure 5-4 shows the water level in the LT03 was reducing when the FV03 was pulsed. After two
minutes of pulsing, the water level had decreased to 49.373%. From the equation, the gain of
the process was -0.8061. Therefore, the transfer function between the LT03 and FV03 was:
−0.8061
𝑠
5.2 LT05
The water level in the LT05 was affected by the PU05, FV03, PU03 and FV02. Therefore, all
transfer functions between each different input and the level in the LT05 were required to be
considered.
0
20
40
60
80
100
0 50 100 150 200 250
Leve
l (%
)
Time (s)
LT03 vs FV03
LT03 FV03

24
5.2.1 LT05 vs PU05
Figure 5-5 LT05 vs PU05 Transfer Function
Figure 5-5 displays the relationship between LT05 and PU05. When a pulse of 10% was applied
on the PU05 for two minutes, the water level in LT05 decreased from 58.968% to 62.977%. The
gain of the process was calculated by using the Rectangular Pulse Response Equation, which was
0.1972. Consequently, the transfer function between LT05 and PU05 was:
0.1972
𝑠
5.2.2 LT05 vs FV03
Figure 5-6 LT05 vs FV03 Transfer Function
0
20
40
60
80
100
0 20 40 60 80 100 120 140 160 180
Leve
l (%
)
Time (s)
LT05 vs PU05
LT05 PU05
0
20
40
60
80
100
0 50 100 150 200 250
Leve
l (%
)
Time (s)
LT05 vs FV03
LT05 FV03

25
Figure 5-6 shows the FV03 was pulsed for two minutes. The water level in LT05 increased to
reach 69.933%. This information was used to find the transfer function between LT05 vs FV03
which was:
0.4430
𝑠
5.2.3 LT05 vs PU03
Figure 5-7 LT05 vs PU03 Transfer Function
Figure 5-7 illustrates the water level in LT05 reduced when the pulse of PU03 was increased by
10%. The gain of this pure capacity system was calculated as -0.0442. Therefore, the transfer
function was:.
−0.0442
𝑠
0
20
40
60
80
100
0 50 100 150 200 250
Leve
l (%
)
Time (s)
LT05 vs PU03
LT05 PU03

26
5.2.4 LT05 vs FV02
Figure 5-8 LT05 vs FV02 Transfer Function
Figure 5-8 displays when the pulse of FV02 was applied for two minutes, the water level of
LT05 decreased by 2.378% from the initial value. The transfer function of this system was:
−0.1189
𝑠
5.3 LT02
There were two input variables that impact the water level in the LT02. They were PU03 and
FV02. The transfer functions between each different input and output was found by applying a
step of input then recording the response until the system reached steady state again. Since the
systems were first order system, the sum of least squares method was used to find each transfer
function. This function consisted of gain, time constant and time delay of the system.
0
20
40
60
80
100
0 50 100 150 200 250 300 350 400
Leve
l (%
)
Time (s)
LT05 vs FV02
LT05 FV02

27
5.3.1 LT02 vs PU03
Figure 5-9 LT02 vs PU03 Transfer Function
Figure 5-9 shows that when a step of ten was applied on the PU03, the water level in the LT02
increased and then reached the new steady state. To find the transfer function of this first order
system, the sum of least squares method was introduced. Therefore, the transfer function
between the LT02 and PU03 was: .
1.1615 𝑒−16.27𝑠
616.72𝑠 + 1
5.3.2 LT02 vs FV02
Figure 5-10 LT02 vs FV02 Transfer Function
0
2
4
6
8
10
12
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 vs PU03
Actual Model
Approximate Model
-5
0
5
10
15
20
25
0 1000 2000 3000 4000 5000
Leve
l (%
)
Time (s)
LT02 vs FV02
Actual Model
Approximate Model

28
Figure 5-10 illustrates the water level in the LT02 increased when a step of five was
introduced. The gain, time constant and time delay were solved using the sum of least squares
method. Consequently, the transfer function between LT02 and FV02 was:
4.175 𝑒−8.95𝑠
1064.5𝑠 + 1
After finding all possible relationships between all inputs and outputs, the transfer functions
were entered into the transfer function matrix. For some manipulated variables that had no
impact on the process variable, a zero number was entered in the Table 5-1.
Table 5-1 Transfer Function Matrix for UWS
To use the RGA to find the best pairings between the MV and PV, the steady state gain of each
transfer function was required. To find the steady state gain from the first order system plus
time delay transfer function, the ‘s’ term was substituted with zero. However, this does not work
for capacitive systems. Therefore, the steady state gains of the pure capacity systems were
considered to be the numerator value for each process.
M1
PU01
M2
FV01
M3
PU05
M4
FV03
M5
PU03
M6
FV02
Y1
LT03
G11
0.0959
𝑠
G12
0.1635
𝑠
G13
−0.3351
𝑠
G14
−0.8061
𝑠
0 0
Y2
LT05
0 0 G23
0.1972
𝑠
G24
0.4430
𝑠
G25
−0.0442
𝑠
G26
−0.1189
𝑠
Y3
LT02
0 0 0 0 G35
1.1615 𝑒−16.27𝑠
616.72𝑠 + 1
G36
4.175 𝑒−8.95𝑠
1064.5𝑠 + 1

29
Table 5-2 Steady State Gain Matrix
M1
PU01
M2
FV01
M3
PU05
M4
FV03
M5
PU03
M6
FV02
Y1
LT03
0.0959 0.1635 -0.3351 -0.8061 0 0
Y2
LT05
0 0 0.1972 0.4430 -0.0442 -0.1189
Y3
LT02
0 0 0 0 1.1615 4.175
Once the steady state gain matrix K in Table 5-2 was completed, it used to calculate the RGA
values. The equation for finding the RGA is:
𝐾.∗ 𝑅
Equation 5-2 RGA Matrix (Seborg et al. 2010)
K= Steady State Gain Matrix
R = (𝐾−1)𝑇
The calculated RGA matrix resulted from the multiplication of each element in K matrix and R
matrix. The R matrix was calculated from the inverted K matrix; therefore, the K matrix was
required be a square matrix. To transform the 3x6 K matrix to be a 3x3 matrix, three of the MVs
were deleted.
This caused 14 possibilities for pairing between MVs and PVs. In this case, the selected possibility
is shown below in Table 5-3, however, all other possibilities are provided in Appendix A.
Table 5-3 PU01, FV03 and PU05 Fixed
M2
FV01
M3
PU05
M6
FV02
Y1
LT03
1 0 0
Y2
LT05
0 1 0
Y3
LT02
0 0 1

30
Table 5-3 occurs when PU01, FV03 and PV05 were fixed and shows there were no interactions
between the systems.
The suitable pairs are:
Table 5-4 the Best Selected Pairs
PV MV
LT03 FV01
LT05 PU05
LT02 FV02
The RGA method analysis showed that the LT03-FV01, LT05-PU05, and LT02-FV02 were suitable
pairings. This was because there was no interaction between each system. The manipulated
variables were considered to directly affect the process variables. Figure5-11 shows the best-
selected pairs between MVs and PVs on the UWS plant. While there are several non-interacting
combinations, this particular combination was selected to provide a variety of control
instruments with positive gains.
RESERVOIR
SV191
SV16
3
GV03
PU06
PU05
FV03
SV05
5
PU02
PU01
FV01
SV01
2
SV14
GV04
PU04
PU03
FV02
SV03
PU08
Area A
Area C
Area B
SV19
SV12
SV154
Figure 5-11 the best-selected pairs between MVs and PVs on the UWS plant

31
Chapter 6 Process Control Strategies
implementation
This section will provide a brief explanation of four controllers and detailed presentation of
control implementation methods. It also shows how tuning parameters were found for each of
the controllers.
In this thesis, there were four process control strategies to implement in the UWS which were
1) Proportional Integral (PI)
2) Generic Model Control (GMC)
3) Dynamic Matrix Control (DMC)
4) Fuzzy Control
6.1 Proportional Integral (PI) Implementation
The proportional Integral Control is a feedback controller. The integral terms can eliminate the
offset (Ogunnaike and Ray 1994). In this thesis, the LabVIEW was used to implement the PI
controller. Therefore, PID block was used to control the water level in the LT03, LT05 and LT02.
For tuning parameters of LT03 and LT05, the relay tuning method was used. This was because
they are a pure capacity system.
The relay tuning will consider the ultimate gain and the ultimate period of the system. This relay
tuning implemented in the LabVIEW code and shown in Appendix B.
The ultimate gain of the system can be found by using relay tuning below equation (Ogunnaike
and Ray 1994):
𝐾𝑐𝑢 = 4ℎ
𝜋𝐴
Kcu= ultimate gain
h = the control amplitude
A= the output amplitude
The ultimate period can be found by measuring peak to peak of output (Ogunnaike and Ray
1994).

32
After finding the ultimate gain and ultimate period, then using the Ziegler-Nichols Stability
Margin Controller Tuning Parameters Table to calculate the tuning parameters (Ogunnaike and
Ray 1994).
The Ziegler-Nichols Approximate Model PID Tuning Rules Table (Ogunnaike and Ray 1994) was
used to calculate the tuning parameters of LT02. This was because the LT02 system was a first
order system.
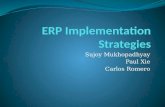
6.1.1 LT03
Figure 6-1 LT03 Relay Tuner
Therefore; Kcu = 13.12 and Pu= 156.5 seconds
From these values, the gain and integral time can be calculated as shown in Table 6-1
Table 6-1 PI Parameters of LT03
Process Variables K Ti (min)
LT03 (Area A) 5.904 2.174
0
10
20
30
40
50
60
70
80
90
100
0 100 200 300 400 500 600
Leve
l (%
)
Time (s)
LT03 Relay Tuner
LT03 FV01
A=3.01
h= 31

33
0
10
20
30
40
50
60
70
80
90
100
0 100 200 300 400 500 600 700
Leve
l (%
)
Time(s)
LT05 Relay Tuner
PU05 LI05.PV
6.1.2 LT05
Figure 6-2 LT05 Relay Tuner
Therefore; Kcu =8.835 and Pu= 159 seconds
From these values, the gain and integral time can be calculated as shown in Table 6-2
Table 6-2 PI Parameters of LT05
Process Variables K Ti (min)
LT05 (Area C) 3.976 2.208
A=2.337
h= 16.5

34
6.1.3 LT02
Figure 6-3 LT02 Approximate Model
The approximate first order system plus time delay of the system can be found by using the
Excel solver as shown in Figure 6-3, which was
From the transfer function,
K=4.175
Time constant = 1064.5 seconds
Time delay= 8.95 seconds
From these values, the gain and integral time of PI controller can be calculated as shown in
Table 6-3.
Table 6-3 PI Parameters of LT02
Process Variables K Ti (min)
LT02 (Area B) 25.632 0.497
0
5
10
15
20
25
0 500 1000 1500 2000 2500 3000 3500 4000 4500
Leve
l (%
)
Time (s)
LT02 Ideal Vs Model
Actual Model
Approximate Model
4.175 𝑒−8.95
1064.5𝑠 + 1

35
6.2 Generic Model Control Implementation
Model-based control is a control approach based on a mathematical process model (Cruz-Cunha
2013). There are two types of the model-based control. The first category is the direct synthesis
approach. The trajectory of desired output can be specified in this type. The controller’s model-
based algorithm will cause the process output to track the desired trajectory. The direct
synthesis method includes direct synthesis control, internal model control, and generic model
control (Ogunnaike and Ray 1994). The second type of the model-based control is the
optimization approach. This kind of model-based control involves an objective function. The
objective function is a differential equation that describes the process variable behaviour
(Simrock 2008). It can be defined as the desired output. The controller will maximize or minimize
this objective function depending on the preference of the company (Ogunnaike and Ray 1994).
In this thesis, the GMC was one of the model-based control methods which was used to control
the tank levels in UWS. Since the GMC produces the current MV using a model of the tank
process, mass balance equations were required to consider the model correctly. Moreover, the
GMC controller required the exact physical quantitative variables. Conversion equations
between the percentages and SI units were required since the UWS controlled program records
and sends data to instruments using percentage units. All conversion equations have been
provided in Appendix C.
6.2.1 GMC: LT03
The LT03 was located in Area A as shown in Figure 6-4. Since the LT03 was controlled by FV01,
the GMC model of this system was required to show the relationship between LT03 and FV01.
However, the LT03 did not receive the water directly from FV01. The water from FV01 first went
to LT01 then it fell via gravity to LT03. Therefore, two mass balance equations were required to
consider the relationships between FV01-LT01 and LT01 and LT03. These two models were
required to find the mathematical connection between FV01 an LT03. Also, the water in LT03
was discharged by PU05 and PU06.

36
RESERVOIR
SV191
SV16
3
GV03
PU06
PU05
FV03
SV05
PU02
PU01
FV01
SV01
Area AM1
M2M3
M4
M5
Figure 6-4 LT03 GMC Model
6.2.1.1 GMC: LT03 Model
The model of the LT03 was developed by using the mass balance equations. The first step was
to develop the mass balance equations of LT01:
𝑑𝑚1
𝑑𝑡 = 𝑀1 + 𝑀2 − 𝑀3
𝜌𝑑𝑉1
𝑑𝑡 = 𝜌𝐹1 + 𝜌𝐹2 − 𝜌𝐹3
𝐴1
𝑑ℎ1
𝑑𝑡 = 𝐹1 + 𝐹2 − 𝑐√ℎ1
𝑐√ℎ1 = 𝐹1 + 𝐹2 − 𝐴1
𝑑ℎ1
𝑑𝑡
The second step was to develop the mass balance equations of LT03:
𝑑𝑚3
𝑑𝑡 = 𝑀3 − 𝑀4 − 𝑀5
𝜌𝑑𝑉3
𝑑𝑡 = 𝜌𝐹3 − 𝜌𝐹4 − 𝜌𝐹5
𝐴2
𝑑ℎ3
𝑑𝑡 = 𝐹3 − 𝐹4 − 𝐹5
The third step was to substitute 𝐹3 = 𝑐√ℎ1 :

37
𝐴2
𝑑ℎ3
𝑑𝑡 = 𝑐√ℎ1 − 𝐹4 − 𝐹5
The fourth step was to substitute 𝑐√ℎ1 with the developed mass balance equation of LT01:
𝐴2
𝑑ℎ3
𝑑𝑡 = 𝐹1 + 𝐹2 − 𝐴
𝑑ℎ1
𝑑𝑡− 𝐹4 − 𝐹5
The relationship between FV01 and LT03 was:
𝑑ℎ3
𝑑𝑡=
1
𝐴2[𝐹1 + 𝐹2 − 𝐴1
(ℎ1(𝑡) − ℎ1(𝑡−1))
∆𝑡− 𝐹4 − 𝐹5]
Then the LT03 model was equated to the GMC algorithm:
1
𝐴2[𝐹1 + 𝐹2 − 𝐴1
(ℎ1(𝑡) − ℎ1(𝑡−1))
∆𝑡− 𝐹4 − 𝐹5] = 𝐾1𝑒 + 𝐾2 ∫ 𝑒 𝑑𝑡
As the LT03 was controlled by the FV01 as a MV, this equation was rearranged to find only the
FV01 on the right hand side of the equation:
[𝐹1 + 𝐹2 − 𝐴1
(ℎ1(𝑡) − ℎ1(𝑡−1))
∆𝑡− 𝐹4 − 𝐹5] = 𝐴2 ∗ [𝐾1𝑒 + 𝐾2 ∫ 𝑒 𝑑𝑡]
𝐹2 = 𝐴2 ∗ [𝐾1𝑒 + 𝐾2 ∫ 𝑒 𝑑𝑡] + 𝐹4 + 𝐹5 − 𝐹1 + 𝐴1
(ℎ1(𝑡) − ℎ1(𝑡−1))
∆𝑡
The next step was to remove the integral part by developing the GMC equation that produced
the change of MV.
𝐹2(𝑛) − 𝐹2(𝑛−1) = 𝐴2 ∗ [𝐾1𝑒 + 𝐾2 ∫ 𝑒 𝑑𝑡] + 𝐹4 + 𝐹5 − 𝐹1 + 𝐴1
(ℎ1(𝑡) − ℎ1(𝑡−1))
∆𝑡− 𝐹2(𝑛−1)
∆𝐹2 = 𝐴2 ∗ [𝐾1𝑒𝑛 + 𝐾2 ∫ 𝑒𝑛 𝑑𝑡] + 𝐹4(𝑛) + 𝐹5(𝑛) − 𝐹1(𝑛) + 𝐴1
(ℎ1(𝑡) − ℎ1(𝑡−1))
∆𝑡− 𝐴2
∗ [𝐾1𝑒(𝑛−1) + 𝐾2 ∫ 𝑒(𝑛−1) 𝑑𝑡] − 𝐹4(𝑛−1) − 𝐹5(𝑛−1) + 𝐹1(𝑛−1)
− 𝐴1
(ℎ1(𝑡−1) − ℎ1(𝑡−2))
∆𝑡

38
The following equation shows that the definition of integral is defined as the limit of a sum.
∫ 𝑓(𝑥)𝑑𝑥 = lim𝛿𝑥→0 ∑ 𝑓(𝑥)
𝑡
0
𝑡
0𝛿𝑥
Equation 6-1 Integral Equation (mathcentre 2009)
The real process is the continous system. However, when the computer receive data, the
system become the discrete time. The data is recorded every 250 ms in this thesis. Therefore,
to get the integral values of the discrete time system to be accurate same as the continous
system, the interval of time (x) is required to be closed to zero.
∆𝐹2 = 𝐴2 ∗ [𝐾1𝑒𝑛 + 𝐾2(𝑒𝑛 + 𝑒𝑛−1 + 𝑒𝑛−2 + ⋯ )] ∗ ∆𝑡 + 𝐹4(𝑛) + 𝐹5(𝑛) − 𝐹1(𝑛)
+ 𝐴1
(ℎ1(𝑡) − ℎ1(𝑡−1))
∆𝑡− 𝐴2 ∗ [𝐾1𝑒(𝑛−1) + 𝐾2(𝑒𝑛−1 + 𝑒𝑛−2 + ⋯ )] ∗ ∆𝑡
− 𝐹4(𝑛−1) − 𝐹5(𝑛−1) + 𝐹1(𝑛−1) − 𝐴1
(ℎ1(𝑡−1) − ℎ1(𝑡−2))
∆𝑡
The sum of errors terms cancelled out
∆𝐹2 = 𝐴2𝐾1[𝑒𝑛 − 𝑒(𝑛−1)] + 𝐴2𝐾2𝑒𝑛∆𝑡 + 𝐹4(𝑛) − 𝐹4(𝑛−1) + 𝐹5(𝑛) − 𝐹5(𝑛−1) − 𝐹1(𝑛) + 𝐹1(𝑛−1)
+ 𝐴1
(ℎ1(𝑡) − ℎ1(𝑡−1))
∆𝑡− 𝐴1
(ℎ1(𝑡−1) − ℎ1(𝑡−2))
∆𝑡
This change of MV was added to the previous MV to be the current MV:
𝐹2(𝑛) = ∆𝐹2 + 𝐹2(𝑛−1)
After calculating the GMC model of the LT03, this equation was programed in the formula
node in LabVIEW.
The physical dimensions of LT01 and LT03 have been listed below for calculating the GMC
model.
Note: LT01 and LT03 were the exact same size.
1) At 100%, the water level in the LT01 and LT03 = 0.87 m
2) Cross section area of LT01 and LT03 = 0.2826 𝑚2

39
6.2.1.2 GMC: LT03 K1, K2 and Tau
The LT03 was a pure capacity system, which the time constant of the system cannot be found
from the transfer function. Therefore, the time constant was considered from the approximate
first order system transfer function of the PI closed loop system as shown in Figure 6-5.
Figure 6-5 LT03 Approximate First Order System Model
𝑇𝑎𝑢 = 87.44 s 휁 = 0.8
𝐾1 =2∗𝜁
𝜏 𝐾2 =
1
𝜏2
𝐾1 =2∗0.8
87.44 𝐾2 =
1
87.442
𝐾1 = 0.018 𝐾2 = 0.000131
6.2.1.3 GMC: LT03 Filter
The final mass balance equation between FV01 and LT03 contained the derivative term
describing the changing water level in LT01. The LabVIEW program loop measured the height
every 250 milliseconds. This tank height signal contained a lot of noise seen as very small
changes in tank level. The derivative term amplified the noise of the signal, which made the
change of MV to move up and down aggressively. Therefore, a signal filter was introduced which
solved this problem.
The signal filter function developed by using digital filter equation as shown below:
0
2
4
6
8
10
12
14
16
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 Ideal Vs Model
Actual Model
Approximate Model
1.045
87.44𝑠 + 1
�̂�(𝑘) = 𝛽�̂�(𝑘 − 1) + (1 − 𝛽)𝑦(𝑘)
Equation 6-2 Digital Filter Equation (Ogunnaike and Ray 1994)

40
�̂�(𝑘) = the filtered value of the signal at sampling instant k
𝑦(𝑘) = the measured signal value at the sampling instant k
𝛽 = the filter constant 0 < 𝛽<1
The suitable filter constant was 0.98, which was determined empirically. Figure 6-6 shows the
measured signal on the left hand side and the filtered signal on the right hand side.
6.2.2 GMC:LT05
The LT05 was located in Area C as shown in Figure 6-7. The LT05 was fed with water from PU05
and PU06. The water in the LT05 was discharged by PU03 and PU04. From the RGA, the PU05
was selected to be MV for the LT05.
Figure 6-6 Filter Signal

41
PU06
PU05
FV03
SV05
5
PU04
PU03
FV02
SV03
Area CM1
M2
M3
M4
Figure 6-7 LT05 GMC Model
A mass balance was taken around LT05 resulted in the following model for water level:
𝑑𝑚5
𝑑𝑡 = 𝑀1 + 𝑀2 − 𝑀3 − 𝑀4
𝜌𝑑𝑉5
𝑑𝑡 = 𝜌𝐹1 + 𝜌𝐹2 − 𝜌𝐹3 − 𝜌𝐹4
𝐴5
𝑑ℎ5
𝑑𝑡 = 𝐹1 + 𝐹2 − 𝐹3 − 𝐹4
𝑑ℎ5
𝑑𝑡 =
𝐹1 + 𝐹2 − 𝐹3 − 𝐹4
𝐴5
Then equated the LT05 model to GMC algorithm
𝐹1 + 𝐹2 − 𝐹3 − 𝐹4
𝐴5= 𝐾1𝑒 + 𝐾2 ∫ 𝑒
𝑡
0
𝑑𝑡
𝐹1 = 𝐴5 ∗ [𝐾1𝑒 + 𝐾2 ∫ 𝑒 𝑑𝑡] − 𝐹2 + 𝐹3 + 𝐹4
The next step was to remove the integral part to consider the change of MV by using Equation
6-1:

42
𝐹1(𝑛) − 𝐹1(𝑛−1) = 𝐴5 ∗ [𝐾1𝑒𝑛 + 𝐾2(𝑒𝑛 + 𝑒𝑛−1 + 𝑒𝑛−2 + ⋯ )] ∗ ∆𝑡 − 𝐹2(𝑛) + 𝐹3(𝑛) + 𝐹4(𝑛)
− 𝐴5 ∗ [𝐾1𝑒𝑛−1 + 𝐾2(𝑒𝑛−1 + 𝑒𝑛−2 + ⋯ )] ∗ ∆𝑡 + 𝐹2(𝑛−1) − 𝐹3(𝑛−1) − 𝐹4(𝑛−1)
The errors terms cancelled out.
∆𝐹1 = 𝐴5 ∗ [𝐾1(𝑒𝑛 − 𝑒𝑛−1) + 𝐾2(𝑒𝑛)∆𝑡] − 𝐹2(𝑛) + 𝐹2(𝑛−1) + 𝐹3(𝑛) − 𝐹3(𝑛−1) + 𝐹4(𝑛)
− 𝐹4(𝑛−1)
This change of MV was added to the previous MV to be the current MV:
𝐹1(𝑛) = ∆𝐹1 + 𝐹1(𝑛−1)
The physical dimensions of LT05 are listed below for calculating the GMC model:
1) At 100%, the water level in the LT05 = 5.86 m
2) Cross section Area of LT05 = 0.07065 𝑚2
6.2.2.1 GMC: LT05 K1, K2 and Tau
Figure 6-8 LT05 Approximate First Order System Model
The LT05 was also a pure capacity system. Consequently, the time constant was determined
from the approximate first order system transfer function of the PI closed loop system as
shown in Figure 6-8.
𝑇𝑎𝑢 = 80.62 s 휁 = 1
𝐾1 =2∗𝜁
𝜏 𝐾2 =
1
𝜏2
0
2
4
6
8
10
12
0 500 1000 1500 2000
Leve
l
Time (s)
LT05 Ideal Vs Model
Actual Model
Approximate Model
1.014
80.62𝑠 + 1

43
𝐾1 =2∗1
80.62 𝐾2 =
1
80.622
𝐾1 = 0.025 𝐾2 = 0.000156
6.2.3 GMC: LT02
The LT02 was located in Area B as shown in Figure 6-9. The LT02 was fed by PU03 and FV02
directly and the water was discharged by falling due to gravity into the LT04 tank. Enough water
was held up in the LT04 tank be able to recycle some back to the LT02 again as a disturbance for
the whole process.
RESERVOIR
2
SV14
GV04
PU04
PU03
FV02
SV03
PU08
Area B
SV12
SV15
4
M1
M2
M4
M3
Figure 6-9 LT02 GMC Model
The model of the LT02 was developed by using a mass balance equation.
Then LT05 model was equated to the GMC algorithm:
𝑑𝑚2
𝑑𝑡 = 𝑀1 + 𝑀2 + 𝑀3 − 𝑀4
𝜌𝑑𝑉2
𝑑𝑡 = 𝜌𝐹1 + 𝜌𝐹2 + 𝜌𝐹3 − 𝜌𝐹4
𝐴2
𝑑ℎ2
𝑑𝑡 = 𝐹1 + 𝐹2 + 𝐹3 − 𝑐√ℎ2

44
𝑑ℎ2
𝑑𝑡 =
𝐹1 + 𝐹2 + 𝐹3 − 𝑐√ℎ2
𝐴5
Then the LT02 model was equated to the GMC algorithm:
𝐹1 + 𝐹2 + 𝐹3 − 𝑐√ℎ2
𝐴5= 𝐾1𝑒 + 𝐾2 ∫ 𝑒 𝑑𝑡
𝐹2 = 𝐴5 ∗ [𝐾1𝑒 + 𝐾2 ∫ 𝑒 𝑑𝑡] − 𝐹1 − 𝐹3 + 𝑐√ℎ2
The next step was to subtract the current value of 𝐹2 with previous term of 𝐹2 to determine
the change of MV:
𝐹2(𝑛) − 𝐹2(𝑛−1) = 𝐴5 ∗ [𝐾1𝑒 + 𝐾2 ∫ 𝑒 𝑑𝑡] − 𝐹1 − 𝐹3 + 𝑐√ℎ2 − 𝐹2(𝑛−1)
Then remove the integral part by using Equation6-1:
𝐹2(𝑛) − 𝐹2(𝑛−1) = 𝐴5 ∗ [𝐾1𝑒𝑛 + 𝐾2(𝑒𝑛 + 𝑒𝑛−1 + 𝑒𝑛−2 + ⋯ ) ∗ ∆𝑡] − 𝐹1(𝑛) − 𝐹3(𝑛) + 𝑐√ℎ2(𝑛)
− 𝐴5 ∗ [𝐾1𝑒𝑛−1 + 𝐾2(𝑒𝑛−1 + 𝑒𝑛−2 + ⋯ ) ∗ ∆𝑡] + 𝐹1(𝑛−1) + 𝐹3(𝑛−1)
− 𝑐√ℎ2(𝑛−1)
Then the errors terms cancelled out each other.
∆𝐹2 = 𝐴5 ∗ [𝐾1(𝑒𝑛 − 𝑒𝑛−1) + 𝐾2(𝑒𝑛)∆𝑡] − 𝐹1(𝑛) + 𝐹1(𝑛−1) − 𝐹3(𝑛) + 𝐹3(𝑛−1) + 𝑐√ℎ2(𝑛)
− 𝑐√ℎ2(𝑛−1)
The current MV was determined by adding the previous MV with the change of MV:
𝐹2(𝑛) = ∆𝐹2 + 𝐹2(𝑛−1)
The physical dimensions of LT03 were listed below as used for calculating the GMC model:
1) At 100%, the water level in the LT03 = 0.87 m
2) Cross section area of LT05 = 0.2826 𝑚2

45
3) C values = 0.00062 𝑚2.5/𝑠. This c value was found by measuring the outlet flow at each
height of water level. A total of 17 points of heights and outlet flows were recorded to
acquire an accurate model. This experiment was repeated three times and plotted on a
single graph. The trend line was taken from the average of all trials as shown in Figure
6-10.
Figure 6-10 C Value for LT02
6.2.3.1 GMC: LT05 K1, K2 and Tau
Since this system is a first order system, the time constant was provided as shown in
Figure 6-11. The 휁 was chosen to be 1.5 because the time constant was too large. Therefore, the
k1 and k2 tunings used were able to bring the system to steady state quickly.
y = 0.00062x
0.0005
0.0006
0.0007
0.0008
0.0009
0.001
0.0011
1.2 1.25 1.3 1.35 1.4 1.45 1.5 1.55 1.6
Flo
w (
m^3
/s)
√ℎ (m^0.5)
C value
Trial 1 Trial 2 Trial 3 Average Linear (Average)

46
Figure 6-11 Approximate Model of LT02
𝑇𝑎𝑢 = 1064.5 s 휁 = 1.5
𝐾1 =2∗𝜁
𝜏 𝐾2 =
1
𝜏2
𝐾1 =2∗1.5
1064.5 𝐾2 =
1
1064.52
𝐾1 = 0.003 𝐾2 = 0.000000882
6.3 Dynamic Matrix Control (DMC)
The Dynamic Matrix Control is one of the model predictive control strategies. It was chosen for
implementation in Area A, Area C and Area B to demonstrate that this system can be control by
using DMC theory. This thesis will show step by step how to implement the DMC to control the
level in the tank for both a pure capacity system and a first order system.
This is the DMC algorithm:
Δ𝑚 = (𝐴𝑇𝑊1𝐴 + 𝑊2)𝐴𝑇𝑊1𝐸′̂ = 𝐾𝑐𝐸′̂
Equation 6-3 DMC algorithm (Bahri 2017)
In this thesis, the A-matrix was found by using Matlab Code (Bahri 2017). The predictive error
matrix, h matrix, S matrix and P matrix were calculated and programmed in Formula nodes in
LabVIEW
0
5
10
15
20
25
0 500 1000 1500 2000 2500 3000 3500 4000 4500
Leve
l (%
)
Time (s)
LT02 Ideal Vs Model
Actual Model
Approximate Model
4.175 𝑒−8.95
1064.5𝑠 + 1

47
6.3.1 DMC: LT03
Since the LT03 was a pure capacity system, the step response from the pure capacity process’s
transfer function did not reach steady state as shown in Figure 6-12. This pure capacity response
was first used in the A-matrix and programmed into the UWS with LabVIEW. The process
continually oscillated and would never reach steady state. This was because the process variable
followed the given predictive model.
This problem was solved by using the approximate first order system of the PI closed loop
response as the predictive model of LT03 as shown in Figure 6-13. Then this transfer function
was used to determine the A-matrix which as shown in Appendix D.
Figure 6-13 DMC LT03 Model
0
5
10
15
20
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 Ideal Vs Model
Actual Model
Approximate Model
Figure 6-12 Pure Capacity System Response
1.045
87.44𝑠 + 1

48
The size of the A-matrix was considered from the following rules (Seborg et al. 2010):
1) N ∆t = ts (Seborg et al. 2010)
ts was the open-loop settling time which was equal to 87.44 s
The sample time for controlling this tank was 4s.
Therefore N = 87
2) Control Horizon (M)
Typically control horizon should be between 5 to 20 (Seborg et al. 2010)
Therefore, the control horizon for this system was chosen as the middle of these
typical values which was 13.
3) Prediction Horizon (P)
P= N+M (Seborg et al. 2010)
Therefore, P =100
From these rules, the A-matrix size was selected to be 100x13
The ratio between tuning parameters W1 and W2 was 5:1, which was determined empirically.
6.3.2 DMC: LT05
The LT05 process was a pure capacity system similar to LT03. Therefore, the PI closed loop
model was used to find the A-matrix and settling time as shown in Figure 6-14.
Figure 6-14 DMC LT05 Model
The size of the A matrix was considered from the following rules (Seborg et al. 2010):
0
2
4
6
8
10
12
0 500 1000 1500 2000
Leve
l
Time (s)
LT05 Ideal Vs Model
Actual Model
Approximate Model
1.014
80.62𝑠 + 1

49
1) N ∆t = ts (Seborg et al. 2010)
ts was the open-loop settling time which was equal to 80.62 s
The sample time for controlling this tank was 4s.
Therefore N = 80
2) Control Horizon (M)
Typically control horizon was between 5 to 20 (Seborg et al. 2010)
Therefore, the control horizon for this system was chosen as the middle of the typical
values which was 13.
3) Prediction Horizon (P)
P= N+M (Seborg et al. 2010)
Therefore, P =93 ~100
From these rules, the A matrix size was selected to be 100x13.
The ratio between tuning parameters W1 and W2 were 5:1 which was determined by
empirical methods.
6.3.3 DMC: LT02
The LT02 was a first order system. The transfer function of the system was found by using
solver in Excel. The acquired transfer function was used to derive the A-matrix and settling
time to find the appropriate size of the A-matrix.
Figure 6-15 DMC LT02 Model
0
5
10
15
20
25
0 1000 2000 3000 4000 5000
Leve
l (%
)
Time (s)
LT02 Ideal Vs Model
Actual Model
Approximate Model
4.175 𝑒−8.95
1064.5𝑠 + 1

50
The size of the A matrix was considered from the following rules (Seborg et al. 2010):
1) N ∆t = ts (Seborg et al. 2010)
ts was the open-loop settling time which was equal to 1064.5 s
The sample time for controlling this tank was 30s. This was because the process was
very slow.
Therefore N = 142
2) Control Horizon (M)
Typically control horizon was between 5 to 20(Seborg et al. 2010).
Therefore, the control horizon for this system was chosen from the middle of the
typical values as 13.
3) Prediction Horizon (P)
P= N+M (Seborg et al. 2010)
Therefore, P =155 but it was reduced to 100 for LabVIEW. This is because the
calculated matrix is oversized.
From these rules, the A matrix size was selected to be 100x13.
The ratio between tuning parameters W1 and W2 were 0.75:1, which was determined
empirically.
6.1 Fuzzy Control
Fuzzy Control used a set of rules to make decisions about the MV value needed to control the
process variable. In the LabVIEW menu, there was a Fuzzy block to implement the Fuzzy Control.
This block required input variables, output variables and a large set of rules designed by the user.
6.1.1 Error Input
Input variables were the data that was acquired from the process. These are error and the rate
of change of the water level (𝑑ℎ
𝑑𝑡). The error was separated into seven sections which were PB,
PM, PS, Z, NS, NM and NB.

51
Figure 6-16 Fuzzy Error Input
PB (Positive Big) means the set-point value is greater than current process variable between 10
to 100.
PM (Positive Medium) means the set-point value is greater than current process variable
between 5 to 20.
PS (Positive small) means the set-point value is greater than current process variable between 0
to 10.
Z (Zero) means the error between set-point value and current process variable is ±5.
NS (Negative small) means the process variable is greater than set-point value between 0 to 10.
NM (Negative medium) means the process variable is greater than set-point value between 5 to
20.
NB (Negative Big) means the process variable is greater than set-point value between 10 to 100.
Overlapping of error ranges made the transitions between zones smoother. The three process
variables controlled in this thesis, which were LT03, LT05, and LT02, used the same ranges of
error input variable.
6.1.2 Rate of Change of Water Level Input
The rate of change of the water level was required to be considered in each tank in each area.
This was because the maximum rate that the water level can increase and the maximum rate
that the water level can decrease in each tank was different due to varying pump speeds, valve
positions, and the number of process input/output streams.

52
6.1.2.1 LT03
The maximum rate that water height in the LT03 could increase was 0.186177 %/s. This
measured rate was generated by maximising the FV01 to 100% and minimising the output PU05
to 53% then finding the slope of the change of the water height as shown in Figure 6-17.
Figure 6-17 The Rate of Increase of Water Level in the LT03
The maximum rate that water level in the LT03 could decrease was -0.53772. This experiment
was completed by minimising the inlet and maximising the outlet. The slope of the change of
the water level was determined to be the maximum rate that water in LT03 could decrease as
shown in Figure 6-18.
Figure 6-18 The Rate of decrease of Water Level in the LT03
After finding limits of the rate of change of water level in the LT03 tank, the derivative of water
level was then divided into seven categories which were PB, PM, PS, Z, NB, NM, and NS as shown
in Figure 6-19.
y = 0.186177x
0
10
20
30
40
50
0 20 40 60 80 100 120 140 160 180 200
Leve
l (%
)
Time(s)
The Rate of Increase of Water Level in the LT03
y = -0.53772x + 37.461
0
10
20
30
40
0 10 20 30 40 50 60 70 80
Leve
l (%
)
Time (s)
The Rate of decrease of Water Level in the LT03

53
Figure 6-19 LT03 Derivative of the Water Level
PB (Positive Big) means the rate to increase the water level in the LT03 between 0.06 %/s to
0.186177 %/s.
PM (Positive Medium) means the rate to increase the water level in the LT03 between 0.01 %/s
to 0.186177 %/s.
PS (Positive small) means the rate to increase the water level in the LT03 between 0 %/s to
0.06%/s.
Z (Zero) means the rate changing of the water level in the LT03 between ±0.01%/𝑠
NS (Negative small) means the rate to decrease the water level in the LT03 between 0 %/s to 0.2
%/s.
NM (Negative medium) means the rate to decrease the water level in the LT03 between 0.01
%/s to 0.53772 %/s.
NB (Negative Big) means the rate to decrease the water level in the LT03 between 0.2%/s to
0.53772 %/s.
6.1.2.2 LT05
The fastest rate to increase the water level in the LT05 was determined by entering 100% to
PU05 and minimised the FV01 to 5%. The slope of the water level changing was considered to
be the fastest rate to fill the tank. Figure 6-20 shows the maximum rate to increase the water
level in the LT05 was 0.179629 %/s.

54
Figure 6-20 The Rate of Increase of Water Level in the LT05
Moreover, the fastest rate of emptying the tank was determined by maximising FV01 to 100%
and minimising the PU05 to 53%. The experiment result showed the maximum rate of
decreasing water level in the tank was -0.1309 as shown in Figure 6-21.
Figure 6-21 The Rate of decrease of Water Level in the LT05
The rate of change of water level in the T05 was also separated into seven sections, which were
PB, PM, PS, Z, NB, NM, and NS as shown in Figure 6-22 below.
Figure 6-22 LT05 Derivative of the Water Level
y = 0.179629x
0
5
10
15
20
25
0 20 40 60 80 100 120 140
Leve
l (%
)
Time (s)
The Rate of Increase of Water Level in the LT05
y = -0.1309x + 26.428
-5
0
5
10
15
20
25
30
0 50 100 150 200 250
Leve
l (%
)
Time(S)
The Rate of decrease of Water Level in the LT05

55
PB (Positive Big) means the rate to increase the water level in the LT05 between 0.0597 %/s to
0.1796 %/s.
PM (Positive Medium) means the rate to increase the water level in the LT05 between 0.01 %/s
to 0.1796 %/s.
PS (Positive small) means the rate to increase the water level in the LT05 between 0 %/s to
0.0597%/s.
Z (Zero) means the rate changing of the water level in the LT05 between ±0.01%/𝑠
NS (Negative small) means the rate to decrease the water level in the LT05 between 0 %/s to
0.0436 %/s.
NM (Negative medium) means the rate to decrease the water level in the LT05 between 0.01
%/s to 0.1309 %/s.
NB (Negative Big) means the rate to decrease the water level in the LT05 between 0.0436%/s to
0.1309 %/s.
6.1.2.3 LT02
Figure 6-23 The Rate of Increase of Water Level in the LT02
The fastest rate to increase the water level in the LT02 was determined by entering 100% to
FV01. Since this system was a first-order system which the water was gravity fall, the system
could not minimize the output flow. The slope of the water level changing was the fastest rate
to fill the tank. Figure 6-23 shows the maximum rate to increase the water level in the LT05 was
0.086 %/s.
y = 0.086x
0
5
10
15
20
25
0 50 100 150 200 250 300
Leve
l (%
)
Time (s)
The Rate of Increase of Water Level in the LT02

56
Figure 6-24 The Rate of Decrease of Water Level in the LT02
The fastest rate to decrease the water level in the LT02 was determined by entering 5.01% to
FV01 to minimize the inlet flow. The fastest rate to empty the water in the LT02 was 0.13635%/s
as shown in Figure 6-24.
The rate of change of water level in the LT05 was also separated into seven sections, which were
PB, PM, PS, Z, NB, NM, and NS as shown in Figure 6-25 below.
Figure 6-25 LT02 Derivative of the Water Level
PB (Positive Big) means the rate to increase the water level in the LT02 between 0.03 %/s to
0.086 %/s.
PM (Positive Medium) means the rate to increase the water level in the LT02 between 0.01 %/s
to 0.086 %/s.
PS (Positive small) means the rate to increase the water level in the LT02 between 0 %/s to
0.03%/s.
y = -0.13635x + 24.776
-5
0
5
10
15
20
25
30
0 20 40 60 80 100 120 140 160 180 200
Leve
l (%
)
Time (s)
The Rate of Decrease of Water Level in the LT02

57
Z (Zero) means the rate changing of the water level in the LT02 between ±0.01%/𝑠
NS (Negative small) means the rate to decrease the water level in the LT02 between 0 %/s to
0.04 %/s.
NM (Negative medium) means the rate to decrease the water level in the LT02 between 0.01
%/s to 0.1364 %/s.
NB (Negative Big) means the rate to decrease the water level in the LT02 between 0.04%/s to
0.1364 %/s.
Similar to error inputs, the Fuzzy controller would control the process variable smoother when
the rate of change zones for water level were designed to overlap. This was because when the
rate of change of water level moved into the next zone, the MV would not jump with a big
change. It would be calculated appropriately to make smooth transitions between each zone.
6.1.3 Fuzzy MV
The output from Fuzzy Control block in LabVIEW was a change MV value for each loop. The
change of MV was considered from the errors of the system and the rate of change for water
level. The change MV of the Fuzzy control was divided into seven categories. They were PB, PM,
PS, Z, NS, NM, and NB. The different situations of system will implement different categories of
MV
6.1.3.1 LT03
Since the rate of increase and decreasing water in the LT03 was high, therefore the MV only
required a small amount of MV change adding up each time.
The change of MV to control the level in the LT03 was separated into PB, PM, PS, Z, NB, NM, and
NS as shown in Figure 6-26 below.
Figure 6-26 MV Changing LT03

58
PB (Positive Big) means the change of MV in the LT03 between 0.03 %/s to 0.08 %/s.
PM (Positive Medium) means the change of MV in the LT03 between 0.01 %/s to 0.08 %/s.
PS (Positive small) means the change of MV in the LT03 between 0 %/s to 0.03%/s .
Z (Zero) means the change of MV in the LT03 between±0.01%/𝑠.
NS (Negative small) means the change of MV in the LT03 between -0.03 %/s to 0 %/s.
NM (Negative medium) means the change of MV in the LT03 between -0.01 %/s to- 0.08 %/s.
NB (Negative Big) means the change of MV in the LT03 between -0.08%/s to -0.03 %/s.
6.1.3.2 LT05 and LT02
Since the rate of increase and decreasing water in the LT05 and LT02 was similar and smaller
than LT03, therefore the MV changes were required to be greater than the MV’s change of the
LT01 and these ranges of MV’s changes were used for both systems.
The change of MV to control the level in the LT05 and LT02 was also separated into PB, PM, PS,
Z, NB, NM, and NS as shown in Figure 6-27 below.
Figure 6-27 MV Changing LT05 and LT02
PB (Positive Big) means the change of MV in the LT03 between 0.05 %/s to 0.1 %/s.
PM (Positive Medium) means the change of MV in the LT03 between 0.01 %/s to 0.1 %/s.
PS (Positive small) means the change of MV in the LT03 between 0 %/s to 0.05%/s .
Z (Zero) means the change of MV in the LT03 between±0.01%/𝑠 .
NS (Negative small) means the change of MV in the LT03 between -0.05 %/s to 0 %/s.
NM (Negative medium) means the change of MV in the LT03 between -0.1 %/s to- 0.01 %/s.
NB (Negative Big) means the change of MV in the LT03 between -0.1%/s to -0.05 %/s.
Similar to inputs, the change of MV was required to overlap to make smooth transition between
each zone

59
6.1.4 Fuzzy Rules
The rules were considered the errors and the rate of water level changing to apply the
appropriate MV changes. For example, if the error was very big positive and the rate to increase
the water level was at maximum then the MV change will be added to the zero zone. This was
because the rate was already highest that it could be. It was not necessary to add more MV in
there. There are 49 rules that were implemented in the Fuzzy Control as shown below.
1.) If error is PB and rate is PB then the MV is Z.
2.) If error is PB and rate is PM, then the MV is PS.
3.) If error is PB and rate is PS, then the MV is PM.
4.) If error is PB and rate is Z, then the MV is PB.
5.) If error is PB and rate is NS, then the MV is PB.
6.) If error is PB and rate is NM then the MV is PB.
7.) If error is PB and rate is NB, then the MV is PB.
8.) If error is PM and rate is PB then the MV is NS.
9.) If error is PM and rate is PM, then the MV is Z.
10.) If error is PM and rate is PS, then the MV is PS.
11.) If error is PM and rate is Z, then the MV is PM.
12.) If error is PM and rate is NS, then the MV is PB.
13.) If error is PM and rate is NM then the MV is PB.
14.) If error is PM and rate is NB, then the MV is PB
15.) If error is PS and rate is PB then the MV is NM.
16.) If error is PS and rate is PM, then the MV is NS.
17.) If error is PS and rate is PS, then the MV is Z.
18.) If error is PS and rate is Z ,then the MV is PS
19.) If error is PS and rate is NS, then the MV is PM.
20.) If error is PS and rate is NM then the MV is PB
21.) If error is PS and rate is NB, then the MV is PB
22.) If error is Z and rate is PB then the MV is NB.
23.) If error is Z and rate is PM, then the MV is NM
24.) If error is Z and rate is PS, then the MV is NS
25.) If error is Z and rate is Z, then the MV is Z.
26.) If error is Z and rate is NS, then the MV is PS.
27.) If error is Z and rate is NM then the MV is PM
28.) If error is Z and rate is NB, then the MV is PB
29.) If error is NS and rate is PB then the MV is NB
30.) If error is NS and rate is PM then the MV is NB
31.) If error is NS and rate is PS, then the MV is NM.
32.) If error is NS and rate is Z, then the MV is NS.
33.) If error is NS and rate is NS, then the MV is Z
34.) If error is NS and rate is NM then the MV is PS
35.) If error is NS and rate is NB, then the MV is PM
36.) If error is NM and rate is PB then the MV is NB.
37.) If error is NM and rate is PM, then the MV is NB
38.) If error is NM and rate is PS then the MV is NB.
39.) If error is NM and rate is Z, then the MV is NM

60
40.) If error is NM and rate is NS, then the MV is NS
41.) If error is NM and rate is NM then the MV is Z
42.) If error is NM and rate is NB, then the MV is PS.
43.) If error is NB and rate is PB then the MV is NB.
44.) If error is NB and rate is PM, then the MV is NB.
45.) If error is NB and rate is PS, then the MV is NB
46.) If error is NB and rate is Z, then the MV is NB
47.) If error is NB and rate is NS, then the MV is NM.
48.) If error is NB and rate is NM then the MV is NS.
49.) If error is NB and rate is NB, then the MV is Z.

61
Chapter 7 Performances Evaluation and
Comparison
This chapter will provide the results of each controller on set point tracking and step changing
tests on each tank. The performances will be evaluated using Integrated Squares Error (ISE),
Integrated Absolute value of the Error (IAE) and Total Variation of the manipulated variable
measurements (TV). Comparison and description of how each controllers perform will be
provided.
7.1 LT03
7.1.1 Set-point Tracking at 50%
The set-point tracking of every controller was tested to investigate the process responses and
the MV actions. Figure 7-1 shows that all controllers were able to hold the process variable at
the set-point. There was no off-set or oscillations produced by any controller. However, the MV
action of the GMC was very aggressive while the DMC’s MV was moved much less often.
0102030405060708090
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Set-point Tracking GMC Control
LT03 FV01
0102030405060708090
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Setpoint Tracking PI controller
LT03 FV01
0102030405060708090
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Set-point Tracking Fuzzy Control
LT03 FV01
0102030405060708090
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Set-point Tracking DMC
LT03 FV01
Figure 7-1 Set-point Tracking Tests of LT03

62
Table 7-1 shows the ISE, IAE and TV values for each controller. The GMC was considered to be
the best controller if the high priority of the project was set-point tracking. This was because the
GMC controller was able to control the water level in the LT01 to set-point with the minimum
error. However, to achieve this the GMC’s MV was very aggressive. On the other hand, the DMC
was considered to be the best controller if the high priority is to minimise the MV movement.
The total variance value is a performance measurement that indicates how aggressive each
controller’s MV movement is. Table6-1 shows the total variance of DMC has the least value
when comparing to the other controllers. This was because the DMC was programmed to move
the valve to control the water level in the tank every 5 seconds while the other controllers were
programmed to control the water level every 250 milliseconds. However, when comparing
between Fuzzy Control and DMC, the MV movements were small numbers but the Fuzzy Control
could not minimise errors as effectively. The reason that the Fuzzy Control MV action was
sluggish even though the program was run every 250 milliseconds, was that the change of MV
each loop was limited to between 0-0.08%. Therefore, the valve position was changed only a
small amount each movement. The PI controller was a compromise controller that produced
less errors than Fuzzy and DMC with moderate MV action.
Table 7-1 ISE, IAE and TV Table of Set-point Tracking LT03
Controllers ISE IAE TV
PI 55.8151 182.551 650.673
GMC 31.8151 136.527 2461.071
DMC 62.41 189.001 146.04
Fuzzy Control 165.311 321.904 172.652
7.1.2 Step Change Test of LT03
The step change testing was completed to consider whether the controllers are working or if
they cause the PV to show erratic behaviour. The step changes of each controller were tested
on step-up and step-down then the results were compared and analysed.

63
7.1.2.1 Step Up from 50% to 60%
This test was completed by stepping up the set-point from 50% to 60%. Figure 7-2 shows that
all controllers were able to control the water level to the new set-point without offset. The PI,
GMC and DMC controllers made the process variable overshoot. The process variable of GMC
was oscillating at the beginning then moved to the steady state. The Fuzzy Control made the
process variable reach to the new set-point slower than the other controllers. However, the
behaviour of the process that was controlled by Fuzzy Control had no overshoot and no
oscillations. The MV of GMC was very aggressive while the MV of Fuzzy control was very sluggish.
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Step Change 50% - 60% GMC
LT03 FV01 Set-point
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Step Change 50% - 60% PI Controller
LT03 FV01 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time(s)
LT03 vs FV01 Step Change 50% - 60% Fuzzy Control
LT03 FV01 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Step Chnage 50%-60% DMC
LT03 FV01 Setpoint
Figure 7-2 Step Up Tests of LT03

64
Table 7-2 shows that the GMC was still the best controller for minimising the errors of UWS Area
A. However, the GMC was used a lot energy to move the valve aggressively. The best controller
for minimising the MV movement was Fuzzy Control. Since the process variable of Fuzzy Control
was very slow to reach the set-point, its resulting ISE and IAE values were very high. The PI and
DMC controller made the process variables move to the new set-point with similar errors, but
the DMC’s MV action was far less than for PI control.
Table 7-2 ISE, IAE and TV Table of Step Up Test LT03
Controllers ISE IAE TV
PI 4352.33 779.911 575.895
GMC 3853.7 831.805 2523.898
DMC 4699.65 1097.81 258.311
Fuzzy Control 10222.4 1804.69 141.045
7.1.2.2 Step Down from 60% to 50%
This test was completed by stepping down the set-point of LT03 from 60% to 50%. Figure 7-3
shows that all controllers were able to bring the system down to the new set-point. The DMC’s
process variable was oscillating at first, before becoming stable. The PI, GMC and DMC MVs
responded to the set-point change instantly, while the Fuzzy control’s MV slowly decreased over
time.

65
Table 7-3 shows that the GMC remained the best controller for minimising the error but the MV
responded very aggressively. The Fuzzy Control was the best controller for minimising the MV
movement but the ISE and IAE values of the process variable were very large. The performance
for PI and DMC were in the middle between GMC and Fuzzy Control. The PI acted more like the
GMC by focusing on minimising errors, but minimizing the MV movement was less important.
The DMC acted more like the Fuzzy Control in that minimising the MV movement was more
important than minimising the error.
Figure 7-3 Step Down Tests of LT03
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Step Change 60% - 50% PI
LT03 FV01 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Step Change 60% - 50% GMC
LT03 FV01 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Step Change 60% - 50% Fuzzy Control
LT03 FV01 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT03 vs FV01 Step down DMC
LT03 FV01 Setpoint

66
Table 7-3 ISE, IAE and TV Table of Step Down Test LT03
Controllers ISE IAE TV
PI 2458.59 594.614 706.503
GMC 1683.73 353.572 2373.937
DMC 4124.7 1031.62 215.431
Fuzzy Control 8445.8 1411.97 163.278
7.2 LT05
7.2.1 Set point tracking at 60%
All responses from different controllers were shown to stay on the set-point with no off-set or
oscillation. From the Figure 7-4, the MVs of each controller looked similar except for the MV of
the Fuzzy control where movement can be seen. However, when calculating the ISE, IAE and TV
of each controller in Table 7-4, the errors minimization of each controller was similar but their
MV movement was very different. The GMC’s MV action was very aggressive while DMC’ TV
value was very small.

67
Table 7-4 ISE, IAE and TV Table of Set-point Tracking LT05
Controllers ISE IAE TV
PI 2.1663 34.7875 285.364
GMC 2.5751 37.721 644.26
DMC 3.26798 44.0925 108.526
Fuzzy Control 3.7438 46.6265 142.008
Figure 7-4 Set-point Tracking Tests of LT05
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Set-point Tracking Fuzzy Control
LT05 PU05
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Set-point Tracking GMC
LT05 PU05
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Set-point Tracking DMC
LT05 PU05
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Set-point Tracking PI Controller
LT05 PU05

68
7.2.2 Step Change
The level controllers were tested by step changing to investigate the stability of the system being
controlled. This was tested by step up and step down of the set point in the LT05 tank.
7.2.2.1 Step up from 60% to 70%
This test was achieved by stepping the set point up by 10%. Figure 7-5 illustrates the PI, GMC
and DMC MVs responded instantly while the Fuzzy Control MV was slowly increasing. The DMC
controller caused the process to overshoot a little bit.
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Step Change 60% - 70% DMC
LT05 PU05 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Step Change 60%-70% GMC
LT05 PU05 Set-point
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Step Change 60% - 70% Fuzzy Control
LT05 PU05 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Step Change 60%-70% PI Control
LT05 PU05 Setpoint
Figure 7-5 Step Up Tests of LT05

69
When comparing the ISE, IAE and TV values in Table 7-5, the DMC and Fuzzy Controls’ TV values
were comparatively small with respect to GMC values. However, the errors of the DMC was very
much smaller than for Fuzzy Control.
Table 7-5 ISE, IAE and TV Table of Step Up LT05
Controllers ISE IAE TV
PI 2591.04 496.433 318.213
GMC 2237.27 370.895 561.76
DMC 2738.84 591.261 159.675
Fuzzy Control 64445.7 7202.97 139.211
7.2.2.2 Step Down from 70%-60%
Figure 7-6 Step Down Tests of LT05
0102030405060708090
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Step Change 70% -60% GMC
LT05 PU05 Setpoint
0102030405060708090
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Step Change 70% - 60% Fuzzy Control
LT05 PU05 Setpoint
0102030405060708090
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Step Change 70% -60% PI
LT05 PU05 Setpoint
0102030405060708090
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT05 vs PU05 Step Change 70% -60% DMC
LT05 PU05 Setpoint

70
Figure 7-6 shows the response of all controllers when the set point was decreased by 10% from
the previous set point. The PI, GMC and DMC controllers’ responses were much faster than for
Fuzzy Control. The DMC controller produced overshoot behaviour by the process. All controllers
were able to control the process variables to reach the new set point without offset.
Table 7-6 ISE, IAE and TV Table of Step Down LT05
Controllers ISE IAE TV
PI 2822.38 547.385 318.401
GMC 3089.47 479.2 574.455
DMC 3015.6 620.983 79.828
Fuzzy Control 9042.39 1554.78 135.23
Analysis of Table 7-6 shows the PI was the best controller if the highest priority was minimising
errors, and the DMC was the best controller if the highest priority was minimising the MV
movement. The Fuzzy control was considered to be worse than DMC for this test. This was
because the MV movement of the Fuzzy control was greater but it still could not control the
process to go to set point faster than the other control algorithms.
7.3 LT02
7.3.1 Set-point Tracking at 50%
Figure 7-7 shows that all controllers were able to control the process variable without offset.
The PI and GMC were able to control the process variables at the set point linearly while the
Fuzzy Control and DMC responses showed a little bit of oscillation.

71
Table 7-7 shows that PI and Fuzzy control had small errors in comparison to GMC and DMC.
However, the PI controller has much larger values of TV than Fuzzy Control. The DMC has the
biggest error measure but the MV movement has the least variance of all controllers.
Table 7-7 ISE, IAE and TV Table of Set-point Tracking of LT02
Controllers ISE IAE TV
PI 4.5699 51.9515 2338.075
GMC 92.7869 255.532 74.47
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 vs FV02 Set-point Tracking Fuzzy Control
LT02 FV02
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 vs FV02 Set-point Tracking PI Control
LT02 FV02
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 vs FV02 Set-point Tracking GMC
LT02 FV02
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 vs FV02 Set-point Tracking DMC
LT02 FV02
Figure 7-7 Set-point Tracking of LT02

72
DMC 123.416 259.733 47.853
Fuzzy Control 10.2322 77.595 121.349
7.3.2 Step Change
7.3.2.1 Step Up from 50%-60%
Figure 7-8 shows that the PI controller’s MV response was immediate when changing the set
point. After the process variable reached the new set point, the MV action was very aggressive
to hold the process variable at the set point. While GM response displayed overshoot, it still
moved to steady state slower than other controllers did. The Fuzzy Control response moved very
slowly until it reached the set point then it stayed at the new steady state without any offset or
overshoot. The response was a small amount of oscillating for the DMC controller.
Figure 7-8 Step Up LT02
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 vs FV02 Step Change 50% - 60% Fuzzy Control
LT02 FV02 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 vs FV02 Step Change 50% - 60% PI Control
LT02 FV02 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 vs FV02 Step Change 50% - 60% GMC
LT02 FV02 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 VS FV02 Step Change 50% - 60% DMC
LT02 FV02
Setpoint

73
Table 7-8 ISE, IAE and TV Table of Step Up of LT02
Controllers ISE IAE TV
PI 1550.88 283.953 2264.712
GMC 12484.1 2723.93 102.946
DMC 4930.76 1168.31 66.78
Fuzzy Control 12188.6 2148.26 121.612
If the minimising error is the most important priority, then Table 7-8 shows that the PI was the
best controller. However, the MV movement of the PI was very high which would require a lot
of energy to continually move the valve. If valve wear is a concern, a better choice may be the
DMC as it was second best at minimising the errors while using the least amount of MV
movement.

74
7.3.2.2 Step Down from 60% to 50%
Figure 7-9 shows that the PI controller responded to the set point changing instantly and the
process variable reached the set point quickest when compared with other controllers. The GMC
responded with some overshoot and took a long time to get a steady state. Table 7-9 shows the
PI was the most effective controller at minimising errors and the DMC was the best controller if
the high priority was adequate error minimization with the least possible MV movement.
Figure 7-9 Step Down LT02
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
LT02 vs FV02 Step Change 60%-50% PI
LT02 FV02 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
LT02 vs FV02 Step Change 60% -50% GMC
LT02 FV02 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
Leve
l (%
)
Time (s)
LT02 vs FV02 Step Change 60% -50% Fuzzy Control
LT02 FV02 Setpoint
0
10
20
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
LT02 vs FV02 Step Change 60%-50% DMC
LT02 FV02 Setpoint

75
Table 7-9 ISE, IAE and TV Table of Step Down of LT02
7.4 Overall Conclusion
All controllers were able to track the set points when the set point was changed and remained
stable. However, their performance is very different. When the set point was changed, the GMC
and PI responded instantly with aggressive MV movements. The water in the tank reached a
new steady state fastest in LT03 and LT05 when they were controlled with GMC. The PI was able
to control the water in LT02 to new steady state in LT02 fastest when compared with the other
three controllers. The Fuzzy Control and DMC were sluggish when compared with the PI and
GMC.
Two criteria were considered to decide which the best controller for UWS is. The first criteria is
minimising errors, which is the most important. Therefore, the lowest ISE and IAE results of
controllers will be selected which are GMC and PI. The second criteria is minimising MV
movement. Very low TV values will help the valves and pumps last longer. Therefore, the Fuzzy
Control and DMC will be the best choice using this criteria.
Controllers ISE IAE TV
PI 868.482 177.97 2419.609
GMC 14657.6 2793.89 90.408
DMC 4046.67 961.103 67.307
Fuzzy Control 5823.25 1310.03 122.349

76
Chapter 8 Disturbance Rejection
All controllers have also tested disturbance rejection. In this thesis, the individual controller and
plant-wide disturbances were considered. Figure 8-1 illustrates that PU01 and PU06 were
considered to be individual disturbances. The PU01 disturbed only LT03 while the PU06
disturbed LT03 and LT05. The PU06 sucked more water out of the LT01 and fed more water into
the LT05. The PU03 and PU08 were considered to be plant-wide control disturbances. The PU03
and PU08 affected the LT02 by increasing the water level. Then the FV02 was required to
decrease to maintain the process variable remain the set point. This caused the rate of
discharging from the LT05 reduced which caused the PU05 was required to reduce. This affected
the rate of outlet flow of LT01, which impacted the FV01 to reduce inlet flow to maintain the
water level to be at set-point.
RESERVOIR
SV191
SV16
3
GV03
PU06
PU05
FV03
SV05
5
PU02
PU01
FV01
SV01
2
SV14
GV04
PU04
PU03
FV02
SV03
PU08
Area A
Area C
Area B
SV19
SV12
SV15
4
Figure 8-1 Disturbances

77
8.1 PU01 Disturbance Results
Figure 8-2 PU01 Disturbance Results
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Step PU01 from 60%-80% Fuzzy Disturbance
LT03 PU01 FV01 LT05 PU05 LT02 FV02
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Step PU01 from 60%-80% DMC Disturbance
LT03 PU01 FV01 LT05 PU05 LT02 FV02
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Step PU01 from 60%-80% GMC Disturbance
LT03 PU01 FV01 LT05 PU05 LT02 FV02
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Step PU01 from 60%-80% PI Disturbance
LT03 PU01 FV01 LT05 PU05 LT02 FV02

78
Figure 8-2 shows all controllers were able to reject the disturbance effect when PU01 was
increased from 60% to 80%. The process variables (LT03, LT05, and LT02) finally went back to
the desired set points. Table 8-1, Table 8-2 and Table 8-3 shows the performance measurement
of LT03, LT05 and LT02 respectively. The GMC control performed the disturbance the best. This
was because the MV of every tank responded instantly. Therefore, the water in every tank
remained the same and the ISE and IAE values were smallest. The PI was the second best of all
disturbance controllers. The water level in LT03 was increasing then the FV01 reduced to bring
the process variable down to the set point. The Fuzzy Control was the third best. There were
more errors in water level in the LT03 than PI controller. The DMC was the poorest disturbance
for this case. This is because the ISE and IAE values of the DMC were large.
Table 8-1 LT03 Performance Measurement when PU01 is a Disturbance
ISE IAE TV
PI 201.185 269.316 595.366
GMC 76.468 212.248 2572.399
DMC 2800.54 1188.57 194.5182
Fuzzy 766.344 503.529 168.399
Table 8-2 LT05 Performance Measurement when PU01 is a Disturbance
ISE IAE TV
PI 1.94374 33.4745 297.966
GMC 1.49384 29.0755 617.418
DMC 197.523 264.412 114.5706
Fuzzy 16.4467 105.411 185.511

79
Table 8-3 LT02 Performance Measurement when PU01 is a Disturbance
ISE IAE TV
PI 4.33667 50.0445 2391.346
GMC 9.27326 73.4715 84.325
DMC 4116.49 1496.31 71.3126
Fuzzy 12.5734 88.0085 130.987

80
8.2 FV03 Disturbance Results
Figure 8-3 FV03 Disturbance Results
0
10
20
30
40
50
60
70
80
90
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
time(s)
Step FV03 from 0%-10% Fuzzy Disturbance
LT03 FV01 LT05 PU05 FV03 LT02 FV02
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Step FV03 from 0%-10% DMC Disturbance
LT03 FV01 LT05 PU05 FV03 LT02 FV02
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Step FV03 from 0%-10% GMC Disturbance
LT03 FV01 LT05 PU05 FV03 LT02 FV02
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Step FV03 from 0%-10% PI Disturbance
LT03 FV01 LT05 PU05 FV03 LT02 FV02

81
Figure 8-3 shows that the GMC was the best controllers for disturbance when stepping up FV03
from 0% to 10%. All PVs stayed at the same set point because the GMC’MVs reacted immediately
when the disturbance was introduced in the systems. The PI was the second best for disturbance
of this case. The water level in the LT05 went up and then MV was reduced to bring the system
back to set point while the water level the LT03 went down. This was because the FV03 sucked
water from LT03. Therefore, the FV01 was increased to bring the PV up to the set point. The
DMC became the third best controller. The controller was able to bring the systems to the set
point. However, there was a little bit oscillating in the LT03. The poorest controller in this case
was the Fuzzy Control. This was because the controller was not able to bring the water to go
back to set point in the LT05. All performance measurements of three tanks are listed below.
The Fuzzy controller had the highest values of ISE and IAE when compared with other three
controllers. This means the Fuzzy controller had the poorest of minimising errors. The GMC had
highest values of TV. This means the GMC’MV was very aggressive to reject to the disturbance.
Table 8-4 LT03 Performance Measurement when FV03 is a Disturbance
ISE IAE TV
PI 717.494 474.471 634.258
GMC 349.727 373.256 2660.823
DMC 1480.47 904.662 226.681
Fuzzy 4782.32 993.252 148.942
Table 8-5 LT05 Performance Measurement when FV03 is a Disturbance
ISE IAE TV
PI 690.592 382.049 282.286
GMC 6.89592 46.191 662.899
DMC 347.841 335.556 119.098
Fuzzy 36829.8 5627.9 76.178

82
Table 8-6 LT02 Performance Measurement when FV03 is a Disturbance
ISE IAE TV
PI 4.49709 50.9275 2282.708
GMC 169.796 352.811 82.748
DMC 936.406 780.29 63.747
Fuzzy 13.7626 93.9265 137.112

83
8.3 PU03 Disturbance Results
Figure 8-4 PU03 Disturbance Results
0
20
40
60
80
100
0 500 1000 1500 2000 2500
Leve
l (%
)
Time(s)
Step PU03 from 60%-100% Fuzzy Disturbance
LT03 FV01 LT05 PU05 LT02 PU03 FV02
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Step PU03 from 60%-100% DMC Disturbance
LT03 FV01 LT05 PU05 LT02 PU03 FV02
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time(s)
Step PU03 from 60%-100% GMC Disturbance
LT03 FV01 LT05 PU05 LT02 PU03 FV02
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Step PU03 from 60%-100% PI Disturbance
LT03 FV01 LT05 PU05 LT02 PU03 FV02

84
Figure 8-4 shows the PI controller was the best controller for disturbance rejection in this case.
There was a small error in the any PVs. It was considered from the ISE and IAE values. The PI
controller had the lowest values as shown in Table 8-7, Table 8-8 and Table 8-9. The GMC was
the second best controller. After PU03 was increasing, all the MV responded immediately.
However, the MV of the LT02 reacted too much. This issue might come from the conversion
equation. The DMC was the third best for disturbance rejection. All PVs went back to the set
points. However, it took longer time tank GMC to go back to set points, and the water in LT03
was oscillating. The poorest controller was the Fuzzy control. The water level in the LT05 was
not able to get back to the set point. The offset occurred after the disturbance was introduced.
This results ISE and IAE values of Fuzzy control were large.
Table 8-7 LT03 Performance Measurement when PU03 is a Disturbance
ISE IAE TV
PI 35.9487 142.614 602.158
GMC 86.9788 237.813 2564.096
DMC 2466.56 1154.28 178.421
Fuzzy 151.869 290.692 108.232
Table 8-8 LT05 Performance Measurement when PU03 is a Disturbance
ISE IAE TV
PI 2.67568 37.329 280.354
GMC 343.859 241.761 585.54
DMC 276.451 394.95 60.264
Fuzzy 19935 4207.27 61.546

85
Table 8-9 LT02 Performance Measurement when PU03 is a Disturbance
ISE IAE TV
PI 7.81397 61.086 2447.192
GMC 23294 3224.65 84.625
DMC 25504 4526.29 30.567
Fuzzy 479.609 369.767 153.558

86
8.4 PU08 Disturbance Results
Figure 8-5 PU08 Disturbance Results
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time(s)
Disturbance Fuzzy
LT03 FV01 LT05 PU05 LT02 FV02 PU08
0
20
40
60
80
100
0 500 1000 1500 2000 2500 3000
Leve
l (%
)
Time (s)
Disturbance DMC
LT03 FV01 LT05 PU05 LT02 FV02 PU08
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time (s)
Disturbance GMC
LT03 FV01 LT05 PU05 LT02 FV02 PU08
0
20
40
60
80
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Leve
l (%
)
Time(s)
Disturbance PI
LT03 FV01 LT05 PU05 LT02 FV02 PU08

87
Figure 8-5 shows that the PI was the best controller for minimising errors. The controller brought
the systems back to set point quicker than the other controllers did. The GMC was considered
to be the second best. This is because the water level in LT03 was hardly changed. However, the
LT02 conversion equation might be faulty which cause the FV02 reacted too much. The Fuzzy
Controller was the third best controller when comparing with DMC response. The DMC was
response too slow in the LT02. This was because the MV of DMC was calculated every 30 seconds
but the MV of the Fuzzy Control was calculated every 250 milliseconds. Therefore, the Fuzzy
Control was a better controller than DMC for disturbance rejection in this case. Table 8-10, Table
8-11 and Table 8-12 show the performance measurements of three tanks. The PI and GMC had
less value of ISE and IAE than DMC and Fuzzy control. Therefore, the PI and GMC were selected
to be good controllers for minimising errors. However, the TV values of PI and GMC were very
high. This means the MVs moved very aggressively.
Table 8-10 LT03 Performance Measurement when PU08 is a Disturbance
ISE IAE TV
PI 1188.19 484.548 498.898
GMC 263.796 362.384 2874.736
DMC 2575.18 995.867 164.126
Fuzzy 13291.4 1675.78 135.66
Table 8-11 LT05 Performance Measurement when PU08 is a Disturbance
ISE IAE TV
PI 871.362 433.995 280.495
GMC 4099.31 927.537 472.177
DMC 825.184 591.11 68.455
Fuzzy 2521.58 916.309 162.05

88
Table 8-12 LT02 Performance Measurement when PU08 is a Disturbance
ISE IAE TV
PI 19.0081 96.754 3569.731
GMC 48430.4 4362.88 95.4
DMC 33298.6 5065.21 32.575
Fuzzy 2113.41 768.887 188.086

89
Chapter 9 Discussion
All controllers were able to control the process variables to the desired set points. For the GMC
and PI, the response to a changing set point and disturbances was very aggressive. The GMC’MV
responded instantly while the MV of PI was changed after an error was measured in the system.
This result can be seen when disturbances occurred in the LT03 and LT05.
However, PI performed better than GMC when disturbances occurred in LT02. This might be
because the GMC conversion equations in the LT02 were mistaken or the controller required
tuning. On the other hand, the integral time of PI parameters was very small. It made the
controller have more integral action and fast control. When there is a disturbance in the LT02,
the PI controller will eliminate the errors quicker than GMC. Therefore, if the GMC of LT02 was
improved by checking more conversion equations and changing tuning parameters of the
system appropriately, GMC should perform better in disturbance test.
The DMC and Fuzzy Control was considered to be the top two at minimising the MV movements.
This can be considered from TV values of DMC and Fuzzy Control. It is because the MV of DMC
in LT03 and LT05 was changed every 5 seconds, and MV in LT03 was calculated every 30 seconds
while the other controllers were changed every 250 milliseconds. For Fuzzy control, the MV was
changed every 250 milliseconds, same as for PI and GMC, but the MV was changed only a very
small amount each loop. Therefore, their total variation of the manipulated variable values was
calculated to be very small.
The difference between controllers is how fast they responded. From the performance
measures, the PI and GMC responded to the disturbance and set point changing very fast. Their
TVs were very high. It shows aggressive MV action to try to reject disturbances to the system.
The TVs values of Fuzzy Control and DMC were very low. Therefore, their performance might
have overshoot and offset. This is because the MVs were not fast enough to eliminate the
disturbances.
When comparing for both minimising MV movements and error minimisation, the DMC was
better than Fuzzy Control. The Fuzzy Control did not require a lot of time and effort to model
the system like DMC and GMC however; it is still very capable of controlling the whole plant.

90
Chapter 10 Future Work Even though all objectives are achieved, there are some future works required to make the plant
ready for plant wide control.
10.1 Program disconnection from the Plant
There is a problem between the Student Program and Client Program which caused the signal
to be disconnected. This problem is a large obstacle when running the plant. The disconnection
occurred intermittently. An attempt to solve this issue was made by putting the access level
request and student program global variable outside the loop as shown in Figure 10-1. The
student program was then saved on the Project Explorer as shown in Figure 10-2 each time that
the student program has been changed. However, this change meant that the plant could
operate longer but the issue still happened intermittently.
Figure 10-1 Access Level Requested and Student Program Global Variable
Figure 10-2 Project Explorer

91
10.2 Hyper-trending Fault
The Hyper-trending interrupts the Compact Rio server runtime. This problem was temporarily
solved by removing the hyper-trending in the new LabVIEW file to prevent the interruption.
However, it could be fixed by storing the data as global variables rather than acquiring the data
from the UWS server every 250 milliseconds. It took long time to store the data on the server
then display them in the Client Program.
10.3 The Low Level Alarms Design Fault
The Low-Level alarms design of the LT03 and LT04 are faulty. The water current made the Low-
Level alarms move up and down even though the water in the tank was full as shown in
Figure 10-3. This fault causes the pumps to trip out on Low Level even though the tanks are full.
The solution proposed to solve this problem is to build the frame around the Low-Level alarm
to prevent the water current from the input flow and output flow affecting the level switch as
shown in Figure 10-4.
Figure 10-3 The Low Level Alarms Design Fault

92
Figure 10-4 The Low Level Alarms Solutions
10.4 Supply Tank Water Level Indicators
The Supply Tank water level indication is required to check whether there is enough water to
run the whole plant. This issue was not found before because the previous students only
operated one area each at a time. This issue was found when all areas were controlled and there
was not enough water in the supply tank, which caused the whole plant trip. Therefore, if the
level indicator is installed, the operator can check whether there is enough water in the supply,
or the program requires the supply tank to be full before an operation.
10.5 Pump9 Fault
Pump 9 was tested by entering values from the Student Template to the Client Program to send
to the pump. However, there was no signal sent to the Pump 9. Also, the signal was sent directly
from Client Program but there was still no signal sent to Pump9. Therefore, the Client Program
must be checked to find out if the pump9 input might be disconnected.
10.6 Overwriting from the Student Program
The Student Program was able to overwrite the values below 53% to the pumps. The input
values that are below 53% will damage the pump. This is because the motor speed should run
between 800 rpm to 1500 rpm. For values below this range, the motor will overheat because of
the higher current draw. Therefore, an interlock in the Student Program will be required.

93
10.7 Redesign a New Process within the Plant
There are several types of instruments and connections, therefore the future students can try
to control different processes. For example, it can be applied to make interacting systems by
opening the inter-connecting globe valves.

94
Chapter 11 Conclusion
All objectives of the thesis have been achieved successfully. The UWS was recommissioned, all
broken terminal connections were repaired and the Compact RIO was restarted to make the
system run smoothly and effectively. The plant is now ready for students to implement plant-
wide controllers. Also, this thesis demonstrated control of the UWS plant as a single integrated
system by using PI, GMC, DMC and Fuzzy Controllers. They were implemented by using LABVIEW
to communicate to the plant successfully. A LabVIEW Student Template to run the whole plant
was created. The template can turn on/off solenoids valves and pumps and can monitor the
levels in all five tanks. The Compact RIO server run time can be monitored on the template as
well. All trends and logging function for recording the data was included in the template.
The PI, GMC, DMC and Fuzzy Control implemented in this thesis were all able to control their
process variables when tested on set-point tracking, step changes, and disturbance rejection.
The PI and GMC controller were effective at minimising errors. However, the MV’s movement
for both these controllers was very aggressive. On the other hand, the DMC and Fuzzy Control
were able to minimise the MV movement with larger errors than PI and GMC. It is not easy to
make a decision regarding which control strategy is the best. It is dependent on the
organisation’s perspective of profit. If the set point of the process variables are critical, the PI
and GMC will be recommended. However, if the set point is not critical and the process variables
are only required to remain at the steady state, the DMC and Fuzzy control will be
recommended. This is because the valves and pumps will last longer and the maintenance cost
should reduce if the movement of MV is reduced.
There are two types of future projects can be done. The first project is concerned with fixing the
networking connections and redesigning the low-level alarm on every tank. This is because this
fault causes pumps to trip out on Low Level even though the tanks are full. The second possible
project is to design more complex process systems to develop more challenging controllers. In
conclusion, it is believed that this thesis has achieved all goals and the plant wide control can be
implemented on the UWS successfully.

95
Bibliography
Bahri, Parisa A. 2017. Model Predictive Control, Murdoch Internal Presentation, Murdoch University.
Blay, Kane. 2010. Design and construction of a multi-level control system using the Compact RIO controller and LabVIEW, Engineering and Information Technology, Murdoch University.
Cole, Benjamin. 2015. Commissioning and Implementing a PROFIBUS network in the Universal Water System, Engineering and Information Technology, Murdoch University.
Cruz-Cunha, M.M. 2013. Handbook of Research on ICTs and Management Systems for Improving Efficiency in Healthcare and Social Care: Medical Information Science Reference.
Ganesan, Jagadeesh. 2012. Design of Standard Maintenance Program and Case Study on UWS, Engineering and Information Technology, Murdoch University.
Ghanea-Hercock, R. 2003. Applied Evolutionary Algorithms in Java: Springer. Janosz, Richard. 2010. Ultimate Water System Installation & Commissioning, Engineering and
Information Technology, Murdoch University. Lee, P.L., R.B. Newell, and I.T. Cameron. 1998. Process control and management: Blackie
Academic & Professional. Liptak, B.G. 2005. Instrument Engineers' Handbook, Fourth Edition, Volume Two: Process
Control and Optimization: CRC Press. Lowen, R., and A. Verschoren. 2007. Foundations of Generic Optimization: Volume 2:
Applications of Fuzzy Control, Genetic Algorithms and Neural Networks: Springer Netherlands.
mathcentre. 2009. "Integration as summation." Moody, Anthony. 2016. Improvements and upgrades to theUniveral Water System's
communications, operations and controls, Engineering and Information Technology, Murdoch University.
Ogunnaike, B.A., and W.H. Ray. 1994. Process Dynamics, Modeling, and Control: Oxford University Press.
Passino, K.M., and S. Yurkovich. 1998. Fuzzy Control: Addison-Wesley. Seborg, D.E., D.A. Mellichamp, T.F. Edgar, and F.J. Doyle. 2010. Process Dynamics and Control:
John Wiley & Sons. Sheppard, Justin. 2009. Universal Water System Design Review, Hardware Installation and
Testing, Engineering and Information Technology, Murdoch University. Simrock, S. 2008. "Control theory." DESY, Hamburg, Germany. Temel, Sena., Yağli, Semih., Gören,Semih. 2013. P, PD, PI, PID CONTROLLERS. MIDDLE EAST
TECHNICAL UNIVERSITY. Tokhmechi, Arash. 2014. Instrumentation and Control Master’s Project Universal Water
System, Engineering and Information Technology, Murdoch University.

96
Appendix A RGA Possibilities

97
Appendix B Relay Tuning Code

98
Appendix C Conversion Equations
y = 5E-06x - 2E-05
0
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
53 58 63 68 73 78 83 88 93 98 103
Flo
w (
m^3
/s)
OP (%)
PU01
PU01 UP PU01 Down
y = 1E-05x - 0.0002
0
0.0002
0.0004
0.0006
0.0008
0.001
0.0012
0.0014
53 63 73 83 93 103
Flo
w (
m^3
/s)
OP(%)
PU05
PU05 UP PU05 Down

99
y = 7E-06x + 0.0002
0
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
0.0007
0.0008
0.0009
0.001
0 20 40 60 80 100 120
Flo
w (
m^3
/s)
Time (s)
FV01
FV01 UP FV01 Down
y = 3E-09x3 - 7E-07x2 + 5E-05x - 0.0001
0
0.0002
0.0004
0.0006
0.0008
0.001
0.0012
0 20 40 60 80 100 120
Flo
w (
m^3
/s)
OP (%)
FV03
FV03 Up FV03 Down

100
y = 3E-06x + 1E-05
0
0.00005
0.0001
0.00015
0.0002
0.00025
0.0003
0.00035
0 20 40 60 80 100 120
Flo
w (
m^3
/s)
OP (%)
PU03
PU03 Up PU03 Down
y = 5E-06x - 6E-05
0
0.00005
0.0001
0.00015
0.0002
0.00025
0.0003
0.00035
0.0004
0.00045
0.0005
53 58 63 68 73 78 83 88 93 98 103
Flo
w (
m^3
/s)
OP (%)
PU08
PU08 Up PU08 Down

101
y = -6E-08x2 + 9E-06x + 0.00035
0
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
0.0007
0.0008
0 20 40 60 80 100 120
Flo
w (
m^3
/s)
OP (%)
FV02
FV01 Up FV02 Down

102
Appendix D A matrix
LT03 A matrix
0.011883 0 0 0 0 0 0 0 0 0 0 0 0
0.058079 0.011883 0 0 0 0 0 0 0 0 0 0 0
0.102209 0.058079 0.011883 0 0 0 0 0 0 0 0 0 0
0.144366 0.102209 0.058079 0.011883 0 0 0 0 0 0 0 0 0
0.184638 0.144366 0.102209 0.058079 0.011883 0 0 0 0 0 0 0 0
0.223109 0.184638 0.144366 0.102209 0.058079 0.011883 0 0 0 0 0 0 0
0.25986 0.223109 0.184638 0.144366 0.102209 0.058079 0.011883 0 0 0 0 0 0
0.294968 0.25986 0.223109 0.184638 0.144366 0.102209 0.058079 0.011883 0 0 0 0 0
0.328506 0.294968 0.25986 0.223109 0.184638 0.144366 0.102209 0.058079 0.011883 0 0 0 0
0.360544 0.328506 0.294968 0.25986 0.223109 0.184638 0.144366 0.102209 0.058079 0.011883 0 0 0
0.391149 0.360544 0.328506 0.294968 0.25986 0.223109 0.184638 0.144366 0.102209 0.058079 0.011883 0 0
0.420386 0.391149 0.360544 0.328506 0.294968 0.25986 0.223109 0.184638 0.144366 0.102209 0.058079 0.011883 0
0.448316 0.420386 0.391149 0.360544 0.328506 0.294968 0.25986 0.223109 0.184638 0.144366 0.102209 0.058079 0.011883
0.474997 0.448316 0.420386 0.391149 0.360544 0.328506 0.294968 0.25986 0.223109 0.184638 0.144366 0.102209 0.058079
0.500484 0.474997 0.448316 0.420386 0.391149 0.360544 0.328506 0.294968 0.25986 0.223109 0.184638 0.144366 0.102209
0.524832 0.500484 0.474997 0.448316 0.420386 0.391149 0.360544 0.328506 0.294968 0.25986 0.223109 0.184638 0.144366
0.548092 0.524832 0.500484 0.474997 0.448316 0.420386 0.391149 0.360544 0.328506 0.294968 0.25986 0.223109 0.184638
0.570311 0.548092 0.524832 0.500484 0.474997 0.448316 0.420386 0.391149 0.360544 0.328506 0.294968 0.25986 0.223109
0.591537 0.570311 0.548092 0.524832 0.500484 0.474997 0.448316 0.420386 0.391149 0.360544 0.328506 0.294968 0.25986
0.611814 0.591537 0.570311 0.548092 0.524832 0.500484 0.474997 0.448316 0.420386 0.391149 0.360544 0.328506 0.294968
0.631183 0.611814 0.591537 0.570311 0.548092 0.524832 0.500484 0.474997 0.448316 0.420386 0.391149 0.360544 0.328506
0.649687 0.631183 0.611814 0.591537 0.570311 0.548092 0.524832 0.500484 0.474997 0.448316 0.420386 0.391149 0.360544
0.667364 0.649687 0.631183 0.611814 0.591537 0.570311 0.548092 0.524832 0.500484 0.474997 0.448316 0.420386 0.391149
0.68425 0.667364 0.649687 0.631183 0.611814 0.591537 0.570311 0.548092 0.524832 0.500484 0.474997 0.448316 0.420386
0.700381 0.68425 0.667364 0.649687 0.631183 0.611814 0.591537 0.570311 0.548092 0.524832 0.500484 0.474997 0.448316
0.71579 0.700381 0.68425 0.667364 0.649687 0.631183 0.611814 0.591537 0.570311 0.548092 0.524832 0.500484 0.474997
0.730511 0.71579 0.700381 0.68425 0.667364 0.649687 0.631183 0.611814 0.591537 0.570311 0.548092 0.524832 0.500484
0.744574 0.730511 0.71579 0.700381 0.68425 0.667364 0.649687 0.631183 0.611814 0.591537 0.570311 0.548092 0.524832
0.758007 0.744574 0.730511 0.71579 0.700381 0.68425 0.667364 0.649687 0.631183 0.611814 0.591537 0.570311 0.548092
0.77084 0.758007 0.744574 0.730511 0.71579 0.700381 0.68425 0.667364 0.649687 0.631183 0.611814 0.591537 0.570311
0.783099 0.77084 0.758007 0.744574 0.730511 0.71579 0.700381 0.68425 0.667364 0.649687 0.631183 0.611814 0.591537
0.79481 0.783099 0.77084 0.758007 0.744574 0.730511 0.71579 0.700381 0.68425 0.667364 0.649687 0.631183 0.611814
0.805997 0.79481 0.783099 0.77084 0.758007 0.744574 0.730511 0.71579 0.700381 0.68425 0.667364 0.649687 0.631183
0.816684 0.805997 0.79481 0.783099 0.77084 0.758007 0.744574 0.730511 0.71579 0.700381 0.68425 0.667364 0.649687
0.826893 0.816684 0.805997 0.79481 0.783099 0.77084 0.758007 0.744574 0.730511 0.71579 0.700381 0.68425 0.667364
0.836646 0.826893 0.816684 0.805997 0.79481 0.783099 0.77084 0.758007 0.744574 0.730511 0.71579 0.700381 0.68425
0.845963 0.836646 0.826893 0.816684 0.805997 0.79481 0.783099 0.77084 0.758007 0.744574 0.730511 0.71579 0.700381
0.854863 0.845963 0.836646 0.826893 0.816684 0.805997 0.79481 0.783099 0.77084 0.758007 0.744574 0.730511 0.71579
0.863365 0.854863 0.845963 0.836646 0.826893 0.816684 0.805997 0.79481 0.783099 0.77084 0.758007 0.744574 0.730511

103
0.871487 0.863365 0.854863 0.845963 0.836646 0.826893 0.816684 0.805997 0.79481 0.783099 0.77084 0.758007 0.744574
0.879245 0.871487 0.863365 0.854863 0.845963 0.836646 0.826893 0.816684 0.805997 0.79481 0.783099 0.77084 0.758007
0.886657 0.879245 0.871487 0.863365 0.854863 0.845963 0.836646 0.826893 0.816684 0.805997 0.79481 0.783099 0.77084
0.893737 0.886657 0.879245 0.871487 0.863365 0.854863 0.845963 0.836646 0.826893 0.816684 0.805997 0.79481 0.783099
0.900501 0.893737 0.886657 0.879245 0.871487 0.863365 0.854863 0.845963 0.836646 0.826893 0.816684 0.805997 0.79481
0.906962 0.900501 0.893737 0.886657 0.879245 0.871487 0.863365 0.854863 0.845963 0.836646 0.826893 0.816684 0.805997
0.913135 0.906962 0.900501 0.893737 0.886657 0.879245 0.871487 0.863365 0.854863 0.845963 0.836646 0.826893 0.816684
0.919031 0.913135 0.906962 0.900501 0.893737 0.886657 0.879245 0.871487 0.863365 0.854863 0.845963 0.836646 0.826893
0.924664 0.919031 0.913135 0.906962 0.900501 0.893737 0.886657 0.879245 0.871487 0.863365 0.854863 0.845963 0.836646
0.930045 0.924664 0.919031 0.913135 0.906962 0.900501 0.893737 0.886657 0.879245 0.871487 0.863365 0.854863 0.845963
0.935185 0.930045 0.924664 0.919031 0.913135 0.906962 0.900501 0.893737 0.886657 0.879245 0.871487 0.863365 0.854863
0.940095 0.935185 0.930045 0.924664 0.919031 0.913135 0.906962 0.900501 0.893737 0.886657 0.879245 0.871487 0.863365
0.944786 0.940095 0.935185 0.930045 0.924664 0.919031 0.913135 0.906962 0.900501 0.893737 0.886657 0.879245 0.871487
0.949267 0.944786 0.940095 0.935185 0.930045 0.924664 0.919031 0.913135 0.906962 0.900501 0.893737 0.886657 0.879245
0.953548 0.949267 0.944786 0.940095 0.935185 0.930045 0.924664 0.919031 0.913135 0.906962 0.900501 0.893737 0.886657
0.957637 0.953548 0.949267 0.944786 0.940095 0.935185 0.930045 0.924664 0.919031 0.913135 0.906962 0.900501 0.893737
0.961544 0.957637 0.953548 0.949267 0.944786 0.940095 0.935185 0.930045 0.924664 0.919031 0.913135 0.906962 0.900501
0.965275 0.961544 0.957637 0.953548 0.949267 0.944786 0.940095 0.935185 0.930045 0.924664 0.919031 0.913135 0.906962
0.96884 0.965275 0.961544 0.957637 0.953548 0.949267 0.944786 0.940095 0.935185 0.930045 0.924664 0.919031 0.913135
0.972246 0.96884 0.965275 0.961544 0.957637 0.953548 0.949267 0.944786 0.940095 0.935185 0.930045 0.924664 0.919031
0.975499 0.972246 0.96884 0.965275 0.961544 0.957637 0.953548 0.949267 0.944786 0.940095 0.935185 0.930045 0.924664
0.978607 0.975499 0.972246 0.96884 0.965275 0.961544 0.957637 0.953548 0.949267 0.944786 0.940095 0.935185 0.930045
0.981575 0.978607 0.975499 0.972246 0.96884 0.965275 0.961544 0.957637 0.953548 0.949267 0.944786 0.940095 0.935185
0.984411 0.981575 0.978607 0.975499 0.972246 0.96884 0.965275 0.961544 0.957637 0.953548 0.949267 0.944786 0.940095
0.987121 0.984411 0.981575 0.978607 0.975499 0.972246 0.96884 0.965275 0.961544 0.957637 0.953548 0.949267 0.944786
0.989709 0.987121 0.984411 0.981575 0.978607 0.975499 0.972246 0.96884 0.965275 0.961544 0.957637 0.953548 0.949267
0.992181 0.989709 0.987121 0.984411 0.981575 0.978607 0.975499 0.972246 0.96884 0.965275 0.961544 0.957637 0.953548
0.994543 0.992181 0.989709 0.987121 0.984411 0.981575 0.978607 0.975499 0.972246 0.96884 0.965275 0.961544 0.957637
0.996799 0.994543 0.992181 0.989709 0.987121 0.984411 0.981575 0.978607 0.975499 0.972246 0.96884 0.965275 0.961544
0.998954 0.996799 0.994543 0.992181 0.989709 0.987121 0.984411 0.981575 0.978607 0.975499 0.972246 0.96884 0.965275
1.001013 0.998954 0.996799 0.994543 0.992181 0.989709 0.987121 0.984411 0.981575 0.978607 0.975499 0.972246 0.96884
1.00298 1.001013 0.998954 0.996799 0.994543 0.992181 0.989709 0.987121 0.984411 0.981575 0.978607 0.975499 0.972246
1.004859 1.00298 1.001013 0.998954 0.996799 0.994543 0.992181 0.989709 0.987121 0.984411 0.981575 0.978607 0.975499
1.006654 1.004859 1.00298 1.001013 0.998954 0.996799 0.994543 0.992181 0.989709 0.987121 0.984411 0.981575 0.978607
1.008369 1.006654 1.004859 1.00298 1.001013 0.998954 0.996799 0.994543 0.992181 0.989709 0.987121 0.984411 0.981575
1.010007 1.008369 1.006654 1.004859 1.00298 1.001013 0.998954 0.996799 0.994543 0.992181 0.989709 0.987121 0.984411
1.011571 1.010007 1.008369 1.006654 1.004859 1.00298 1.001013 0.998954 0.996799 0.994543 0.992181 0.989709 0.987121
1.013066 1.011571 1.010007 1.008369 1.006654 1.004859 1.00298 1.001013 0.998954 0.996799 0.994543 0.992181 0.989709
1.014494 1.013066 1.011571 1.010007 1.008369 1.006654 1.004859 1.00298 1.001013 0.998954 0.996799 0.994543 0.992181
1.015858 1.014494 1.013066 1.011571 1.010007 1.008369 1.006654 1.004859 1.00298 1.001013 0.998954 0.996799 0.994543
1.017161 1.015858 1.014494 1.013066 1.011571 1.010007 1.008369 1.006654 1.004859 1.00298 1.001013 0.998954 0.996799
1.018406 1.017161 1.015858 1.014494 1.013066 1.011571 1.010007 1.008369 1.006654 1.004859 1.00298 1.001013 0.998954
1.019595 1.018406 1.017161 1.015858 1.014494 1.013066 1.011571 1.010007 1.008369 1.006654 1.004859 1.00298 1.001013
1.020731 1.019595 1.018406 1.017161 1.015858 1.014494 1.013066 1.011571 1.010007 1.008369 1.006654 1.004859 1.00298
1.021816 1.020731 1.019595 1.018406 1.017161 1.015858 1.014494 1.013066 1.011571 1.010007 1.008369 1.006654 1.004859

104
1.022853 1.021816 1.020731 1.019595 1.018406 1.017161 1.015858 1.014494 1.013066 1.011571 1.010007 1.008369 1.006654
1.023843 1.022853 1.021816 1.020731 1.019595 1.018406 1.017161 1.015858 1.014494 1.013066 1.011571 1.010007 1.008369
1.024789 1.023843 1.022853 1.021816 1.020731 1.019595 1.018406 1.017161 1.015858 1.014494 1.013066 1.011571 1.010007
1.025693 1.024789 1.023843 1.022853 1.021816 1.020731 1.019595 1.018406 1.017161 1.015858 1.014494 1.013066 1.011571
1.026556 1.025693 1.024789 1.023843 1.022853 1.021816 1.020731 1.019595 1.018406 1.017161 1.015858 1.014494 1.013066
1.027381 1.026556 1.025693 1.024789 1.023843 1.022853 1.021816 1.020731 1.019595 1.018406 1.017161 1.015858 1.014494
1.028169 1.027381 1.026556 1.025693 1.024789 1.023843 1.022853 1.021816 1.020731 1.019595 1.018406 1.017161 1.015858
1.028922 1.028169 1.027381 1.026556 1.025693 1.024789 1.023843 1.022853 1.021816 1.020731 1.019595 1.018406 1.017161
1.02964 1.028922 1.028169 1.027381 1.026556 1.025693 1.024789 1.023843 1.022853 1.021816 1.020731 1.019595 1.018406
1.030327 1.02964 1.028922 1.028169 1.027381 1.026556 1.025693 1.024789 1.023843 1.022853 1.021816 1.020731 1.019595
1.030983 1.030327 1.02964 1.028922 1.028169 1.027381 1.026556 1.025693 1.024789 1.023843 1.022853 1.021816 1.020731
1.03161 1.030983 1.030327 1.02964 1.028922 1.028169 1.027381 1.026556 1.025693 1.024789 1.023843 1.022853 1.021816
1.032209 1.03161 1.030983 1.030327 1.02964 1.028922 1.028169 1.027381 1.026556 1.025693 1.024789 1.023843 1.022853
1.032781 1.032209 1.03161 1.030983 1.030327 1.02964 1.028922 1.028169 1.027381 1.026556 1.025693 1.024789 1.023843
1.033327 1.032781 1.032209 1.03161 1.030983 1.030327 1.02964 1.028922 1.028169 1.027381 1.026556 1.025693 1.024789
1.033849 1.033327 1.032781 1.032209 1.03161 1.030983 1.030327 1.02964 1.028922 1.028169 1.027381 1.026556 1.025693
LT05 A matrix
0.012451 0 0 0 0 0 0 0 0 0 0 0 0
0.060737 0.012451 0 0 0 0 0 0 0 0 0 0 0
0.106685 0.060737 0.012451 0 0 0 0 0 0 0 0 0 0
0.15041 0.106685 0.060737 0.012451 0 0 0 0 0 0 0 0 0
0.192018 0.15041 0.106685 0.060737 0.012451 0 0 0 0 0 0 0 0
0.231613 0.192018 0.15041 0.106685 0.060737 0.012451 0 0 0 0 0 0 0
0.26929 0.231613 0.192018 0.15041 0.106685 0.060737 0.012451 0 0 0 0 0 0
0.305144 0.26929 0.231613 0.192018 0.15041 0.106685 0.060737 0.012451 0 0 0 0 0
0.339262 0.305144 0.26929 0.231613 0.192018 0.15041 0.106685 0.060737 0.012451 0 0 0 0
0.371729 0.339262 0.305144 0.26929 0.231613 0.192018 0.15041 0.106685 0.060737 0.012451 0 0 0
0.402625 0.371729 0.339262 0.305144 0.26929 0.231613 0.192018 0.15041 0.106685 0.060737 0.012451 0 0
0.432025 0.402625 0.371729 0.339262 0.305144 0.26929 0.231613 0.192018 0.15041 0.106685 0.060737 0.012451 0
0.460001 0.432025 0.402625 0.371729 0.339262 0.305144 0.26929 0.231613 0.192018 0.15041 0.106685 0.060737 0.012451
0.486624 0.460001 0.432025 0.402625 0.371729 0.339262 0.305144 0.26929 0.231613 0.192018 0.15041 0.106685 0.060737
0.511958 0.486624 0.460001 0.432025 0.402625 0.371729 0.339262 0.305144 0.26929 0.231613 0.192018 0.15041 0.106685
0.536065 0.511958 0.486624 0.460001 0.432025 0.402625 0.371729 0.339262 0.305144 0.26929 0.231613 0.192018 0.15041
0.559006 0.536065 0.511958 0.486624 0.460001 0.432025 0.402625 0.371729 0.339262 0.305144 0.26929 0.231613 0.192018
0.580836 0.559006 0.536065 0.511958 0.486624 0.460001 0.432025 0.402625 0.371729 0.339262 0.305144 0.26929 0.231613
0.60161 0.580836 0.559006 0.536065 0.511958 0.486624 0.460001 0.432025 0.402625 0.371729 0.339262 0.305144 0.26929
0.621378 0.60161 0.580836 0.559006 0.536065 0.511958 0.486624 0.460001 0.432025 0.402625 0.371729 0.339262 0.305144
0.640189 0.621378 0.60161 0.580836 0.559006 0.536065 0.511958 0.486624 0.460001 0.432025 0.402625 0.371729 0.339262
0.65809 0.640189 0.621378 0.60161 0.580836 0.559006 0.536065 0.511958 0.486624 0.460001 0.432025 0.402625 0.371729
0.675124 0.65809 0.640189 0.621378 0.60161 0.580836 0.559006 0.536065 0.511958 0.486624 0.460001 0.432025 0.402625

105
0.691333 0.675124 0.65809 0.640189 0.621378 0.60161 0.580836 0.559006 0.536065 0.511958 0.486624 0.460001 0.432025
0.706758 0.691333 0.675124 0.65809 0.640189 0.621378 0.60161 0.580836 0.559006 0.536065 0.511958 0.486624 0.460001
0.721437 0.706758 0.691333 0.675124 0.65809 0.640189 0.621378 0.60161 0.580836 0.559006 0.536065 0.511958 0.486624
0.735404 0.721437 0.706758 0.691333 0.675124 0.65809 0.640189 0.621378 0.60161 0.580836 0.559006 0.536065 0.511958
0.748696 0.735404 0.721437 0.706758 0.691333 0.675124 0.65809 0.640189 0.621378 0.60161 0.580836 0.559006 0.536065
0.761345 0.748696 0.735404 0.721437 0.706758 0.691333 0.675124 0.65809 0.640189 0.621378 0.60161 0.580836 0.559006
0.773381 0.761345 0.748696 0.735404 0.721437 0.706758 0.691333 0.675124 0.65809 0.640189 0.621378 0.60161 0.580836
0.784834 0.773381 0.761345 0.748696 0.735404 0.721437 0.706758 0.691333 0.675124 0.65809 0.640189 0.621378 0.60161
0.795733 0.784834 0.773381 0.761345 0.748696 0.735404 0.721437 0.706758 0.691333 0.675124 0.65809 0.640189 0.621378
0.806105 0.795733 0.784834 0.773381 0.761345 0.748696 0.735404 0.721437 0.706758 0.691333 0.675124 0.65809 0.640189
0.815974 0.806105 0.795733 0.784834 0.773381 0.761345 0.748696 0.735404 0.721437 0.706758 0.691333 0.675124 0.65809
0.825366 0.815974 0.806105 0.795733 0.784834 0.773381 0.761345 0.748696 0.735404 0.721437 0.706758 0.691333 0.675124
0.834303 0.825366 0.815974 0.806105 0.795733 0.784834 0.773381 0.761345 0.748696 0.735404 0.721437 0.706758 0.691333
0.842808 0.834303 0.825366 0.815974 0.806105 0.795733 0.784834 0.773381 0.761345 0.748696 0.735404 0.721437 0.706758
0.850901 0.842808 0.834303 0.825366 0.815974 0.806105 0.795733 0.784834 0.773381 0.761345 0.748696 0.735404 0.721437
0.858602 0.850901 0.842808 0.834303 0.825366 0.815974 0.806105 0.795733 0.784834 0.773381 0.761345 0.748696 0.735404
0.86593 0.858602 0.850901 0.842808 0.834303 0.825366 0.815974 0.806105 0.795733 0.784834 0.773381 0.761345 0.748696
0.872904 0.86593 0.858602 0.850901 0.842808 0.834303 0.825366 0.815974 0.806105 0.795733 0.784834 0.773381 0.761345
0.87954 0.872904 0.86593 0.858602 0.850901 0.842808 0.834303 0.825366 0.815974 0.806105 0.795733 0.784834 0.773381
0.885855 0.87954 0.872904 0.86593 0.858602 0.850901 0.842808 0.834303 0.825366 0.815974 0.806105 0.795733 0.784834
0.891864 0.885855 0.87954 0.872904 0.86593 0.858602 0.850901 0.842808 0.834303 0.825366 0.815974 0.806105 0.795733
0.897582 0.891864 0.885855 0.87954 0.872904 0.86593 0.858602 0.850901 0.842808 0.834303 0.825366 0.815974 0.806105
0.903024 0.897582 0.891864 0.885855 0.87954 0.872904 0.86593 0.858602 0.850901 0.842808 0.834303 0.825366 0.815974
0.908202 0.903024 0.897582 0.891864 0.885855 0.87954 0.872904 0.86593 0.858602 0.850901 0.842808 0.834303 0.825366
0.91313 0.908202 0.903024 0.897582 0.891864 0.885855 0.87954 0.872904 0.86593 0.858602 0.850901 0.842808 0.834303
0.917819 0.91313 0.908202 0.903024 0.897582 0.891864 0.885855 0.87954 0.872904 0.86593 0.858602 0.850901 0.842808
0.922281 0.917819 0.91313 0.908202 0.903024 0.897582 0.891864 0.885855 0.87954 0.872904 0.86593 0.858602 0.850901
0.926527 0.922281 0.917819 0.91313 0.908202 0.903024 0.897582 0.891864 0.885855 0.87954 0.872904 0.86593 0.858602
0.930567 0.926527 0.922281 0.917819 0.91313 0.908202 0.903024 0.897582 0.891864 0.885855 0.87954 0.872904 0.86593
0.934412 0.930567 0.926527 0.922281 0.917819 0.91313 0.908202 0.903024 0.897582 0.891864 0.885855 0.87954 0.872904
0.938071 0.934412 0.930567 0.926527 0.922281 0.917819 0.91313 0.908202 0.903024 0.897582 0.891864 0.885855 0.87954
0.941553 0.938071 0.934412 0.930567 0.926527 0.922281 0.917819 0.91313 0.908202 0.903024 0.897582 0.891864 0.885855
0.944866 0.941553 0.938071 0.934412 0.930567 0.926527 0.922281 0.917819 0.91313 0.908202 0.903024 0.897582 0.891864
0.948019 0.944866 0.941553 0.938071 0.934412 0.930567 0.926527 0.922281 0.917819 0.91313 0.908202 0.903024 0.897582
0.951019 0.948019 0.944866 0.941553 0.938071 0.934412 0.930567 0.926527 0.922281 0.917819 0.91313 0.908202 0.903024
0.953874 0.951019 0.948019 0.944866 0.941553 0.938071 0.934412 0.930567 0.926527 0.922281 0.917819 0.91313 0.908202
0.956591 0.953874 0.951019 0.948019 0.944866 0.941553 0.938071 0.934412 0.930567 0.926527 0.922281 0.917819 0.91313
0.959176 0.956591 0.953874 0.951019 0.948019 0.944866 0.941553 0.938071 0.934412 0.930567 0.926527 0.922281 0.917819
0.961636 0.959176 0.956591 0.953874 0.951019 0.948019 0.944866 0.941553 0.938071 0.934412 0.930567 0.926527 0.922281
0.963977 0.961636 0.959176 0.956591 0.953874 0.951019 0.948019 0.944866 0.941553 0.938071 0.934412 0.930567 0.926527
0.966205 0.963977 0.961636 0.959176 0.956591 0.953874 0.951019 0.948019 0.944866 0.941553 0.938071 0.934412 0.930567
0.968325 0.966205 0.963977 0.961636 0.959176 0.956591 0.953874 0.951019 0.948019 0.944866 0.941553 0.938071 0.934412
0.970342 0.968325 0.966205 0.963977 0.961636 0.959176 0.956591 0.953874 0.951019 0.948019 0.944866 0.941553 0.938071
0.972262 0.970342 0.968325 0.966205 0.963977 0.961636 0.959176 0.956591 0.953874 0.951019 0.948019 0.944866 0.941553
0.974088 0.972262 0.970342 0.968325 0.966205 0.963977 0.961636 0.959176 0.956591 0.953874 0.951019 0.948019 0.944866

106
LT02 A matrix
0.975827 0.974088 0.972262 0.970342 0.968325 0.966205 0.963977 0.961636 0.959176 0.956591 0.953874 0.951019 0.948019
0.977481 0.975827 0.974088 0.972262 0.970342 0.968325 0.966205 0.963977 0.961636 0.959176 0.956591 0.953874 0.951019
0.979055 0.977481 0.975827 0.974088 0.972262 0.970342 0.968325 0.966205 0.963977 0.961636 0.959176 0.956591 0.953874
0.980553 0.979055 0.977481 0.975827 0.974088 0.972262 0.970342 0.968325 0.966205 0.963977 0.961636 0.959176 0.956591
0.981978 0.980553 0.979055 0.977481 0.975827 0.974088 0.972262 0.970342 0.968325 0.966205 0.963977 0.961636 0.959176
0.983334 0.981978 0.980553 0.979055 0.977481 0.975827 0.974088 0.972262 0.970342 0.968325 0.966205 0.963977 0.961636
0.984625 0.983334 0.981978 0.980553 0.979055 0.977481 0.975827 0.974088 0.972262 0.970342 0.968325 0.966205 0.963977
0.985853 0.984625 0.983334 0.981978 0.980553 0.979055 0.977481 0.975827 0.974088 0.972262 0.970342 0.968325 0.966205
0.987022 0.985853 0.984625 0.983334 0.981978 0.980553 0.979055 0.977481 0.975827 0.974088 0.972262 0.970342 0.968325
0.988135 0.987022 0.985853 0.984625 0.983334 0.981978 0.980553 0.979055 0.977481 0.975827 0.974088 0.972262 0.970342
0.989193 0.988135 0.987022 0.985853 0.984625 0.983334 0.981978 0.980553 0.979055 0.977481 0.975827 0.974088 0.972262
0.9902 0.989193 0.988135 0.987022 0.985853 0.984625 0.983334 0.981978 0.980553 0.979055 0.977481 0.975827 0.974088
0.991158 0.9902 0.989193 0.988135 0.987022 0.985853 0.984625 0.983334 0.981978 0.980553 0.979055 0.977481 0.975827
0.99207 0.991158 0.9902 0.989193 0.988135 0.987022 0.985853 0.984625 0.983334 0.981978 0.980553 0.979055 0.977481
0.992938 0.99207 0.991158 0.9902 0.989193 0.988135 0.987022 0.985853 0.984625 0.983334 0.981978 0.980553 0.979055
0.993764 0.992938 0.99207 0.991158 0.9902 0.989193 0.988135 0.987022 0.985853 0.984625 0.983334 0.981978 0.980553
0.99455 0.993764 0.992938 0.99207 0.991158 0.9902 0.989193 0.988135 0.987022 0.985853 0.984625 0.983334 0.981978
0.995298 0.99455 0.993764 0.992938 0.99207 0.991158 0.9902 0.989193 0.988135 0.987022 0.985853 0.984625 0.983334
0.99601 0.995298 0.99455 0.993764 0.992938 0.99207 0.991158 0.9902 0.989193 0.988135 0.987022 0.985853 0.984625
0.996687 0.99601 0.995298 0.99455 0.993764 0.992938 0.99207 0.991158 0.9902 0.989193 0.988135 0.987022 0.985853
0.997331 0.996687 0.99601 0.995298 0.99455 0.993764 0.992938 0.99207 0.991158 0.9902 0.989193 0.988135 0.987022
0.997944 0.997331 0.996687 0.99601 0.995298 0.99455 0.993764 0.992938 0.99207 0.991158 0.9902 0.989193 0.988135
0.998528 0.997944 0.997331 0.996687 0.99601 0.995298 0.99455 0.993764 0.992938 0.99207 0.991158 0.9902 0.989193
0.999083 0.998528 0.997944 0.997331 0.996687 0.99601 0.995298 0.99455 0.993764 0.992938 0.99207 0.991158 0.9902
0.999612 0.999083 0.998528 0.997944 0.997331 0.996687 0.99601 0.995298 0.99455 0.993764 0.992938 0.99207 0.991158
1.000115 0.999612 0.999083 0.998528 0.997944 0.997331 0.996687 0.99601 0.995298 0.99455 0.993764 0.992938 0.99207
1.000593 1.000115 0.999612 0.999083 0.998528 0.997944 0.997331 0.996687 0.99601 0.995298 0.99455 0.993764 0.992938
1.001048 1.000593 1.000115 0.999612 0.999083 0.998528 0.997944 0.997331 0.996687 0.99601 0.995298 0.99455 0.993764
1.001482 1.001048 1.000593 1.000115 0.999612 0.999083 0.998528 0.997944 0.997331 0.996687 0.99601 0.995298 0.99455
1.001894 1.001482 1.001048 1.000593 1.000115 0.999612 0.999083 0.998528 0.997944 0.997331 0.996687 0.99601 0.995298
1.002286 1.001894 1.001482 1.001048 1.000593 1.000115 0.999612 0.999083 0.998528 0.997944 0.997331 0.996687 0.99601
1.00266 1.002286 1.001894 1.001482 1.001048 1.000593 1.000115 0.999612 0.999083 0.998528 0.997944 0.997331 0.996687
0 0 0 0 0 0 0 0 0 0 0 0 0
0.00392 0 0 0 0 0 0 0 0 0 0 0 0
0.11983 0.00392 0 0 0 0 0 0 0 0 0 0 0
0.232518 0.11983 0.00392 0 0 0 0 0 0 0 0 0 0
0.342075 0.232518 0.11983 0.00392 0 0 0 0 0 0 0 0 0

107
0.448588 0.342075 0.232518 0.11983 0.00392 0 0 0 0 0 0 0 0
0.55214 0.448588 0.342075 0.232518 0.11983 0.00392 0 0 0 0 0 0 0
0.652815 0.55214 0.448588 0.342075 0.232518 0.11983 0.00392 0 0 0 0 0 0
0.750693 0.652815 0.55214 0.448588 0.342075 0.232518 0.11983 0.00392 0 0 0 0 0
0.84585 0.750693 0.652815 0.55214 0.448588 0.342075 0.232518 0.11983 0.00392 0 0 0 0
0.938363 0.84585 0.750693 0.652815 0.55214 0.448588 0.342075 0.232518 0.11983 0.00392 0 0 0
1.028306 0.938363 0.84585 0.750693 0.652815 0.55214 0.448588 0.342075 0.232518 0.11983 0.00392 0 0
1.115749 1.028306 0.938363 0.84585 0.750693 0.652815 0.55214 0.448588 0.342075 0.232518 0.11983 0.00392 0
1.200762 1.115749 1.028306 0.938363 0.84585 0.750693 0.652815 0.55214 0.448588 0.342075 0.232518 0.11983 0.00392
1.283412 1.200762 1.115749 1.028306 0.938363 0.84585 0.750693 0.652815 0.55214 0.448588 0.342075 0.232518 0.11983
1.363766 1.283412 1.200762 1.115749 1.028306 0.938363 0.84585 0.750693 0.652815 0.55214 0.448588 0.342075 0.232518
1.441887 1.363766 1.283412 1.200762 1.115749 1.028306 0.938363 0.84585 0.750693 0.652815 0.55214 0.448588 0.342075
1.517837 1.441887 1.363766 1.283412 1.200762 1.115749 1.028306 0.938363 0.84585 0.750693 0.652815 0.55214 0.448588
1.591676 1.517837 1.441887 1.363766 1.283412 1.200762 1.115749 1.028306 0.938363 0.84585 0.750693 0.652815 0.55214
1.663464 1.591676 1.517837 1.441887 1.363766 1.283412 1.200762 1.115749 1.028306 0.938363 0.84585 0.750693 0.652815
1.733257 1.663464 1.591676 1.517837 1.441887 1.363766 1.283412 1.200762 1.115749 1.028306 0.938363 0.84585 0.750693
1.80111 1.733257 1.663464 1.591676 1.517837 1.441887 1.363766 1.283412 1.200762 1.115749 1.028306 0.938363 0.84585
1.867077 1.80111 1.733257 1.663464 1.591676 1.517837 1.441887 1.363766 1.283412 1.200762 1.115749 1.028306 0.938363
1.931212 1.867077 1.80111 1.733257 1.663464 1.591676 1.517837 1.441887 1.363766 1.283412 1.200762 1.115749 1.028306
1.993564 1.931212 1.867077 1.80111 1.733257 1.663464 1.591676 1.517837 1.441887 1.363766 1.283412 1.200762 1.115749
2.054184 1.993564 1.931212 1.867077 1.80111 1.733257 1.663464 1.591676 1.517837 1.441887 1.363766 1.283412 1.200762
2.113119 2.054184 1.993564 1.931212 1.867077 1.80111 1.733257 1.663464 1.591676 1.517837 1.441887 1.363766 1.283412
2.170416 2.113119 2.054184 1.993564 1.931212 1.867077 1.80111 1.733257 1.663464 1.591676 1.517837 1.441887 1.363766
2.226121 2.170416 2.113119 2.054184 1.993564 1.931212 1.867077 1.80111 1.733257 1.663464 1.591676 1.517837 1.441887
2.280278 2.226121 2.170416 2.113119 2.054184 1.993564 1.931212 1.867077 1.80111 1.733257 1.663464 1.591676 1.517837
2.33293 2.280278 2.226121 2.170416 2.113119 2.054184 1.993564 1.931212 1.867077 1.80111 1.733257 1.663464 1.591676
2.384119 2.33293 2.280278 2.226121 2.170416 2.113119 2.054184 1.993564 1.931212 1.867077 1.80111 1.733257 1.663464
2.433886 2.384119 2.33293 2.280278 2.226121 2.170416 2.113119 2.054184 1.993564 1.931212 1.867077 1.80111 1.733257
2.482269 2.433886 2.384119 2.33293 2.280278 2.226121 2.170416 2.113119 2.054184 1.993564 1.931212 1.867077 1.80111
2.529308 2.482269 2.433886 2.384119 2.33293 2.280278 2.226121 2.170416 2.113119 2.054184 1.993564 1.931212 1.867077
2.57504 2.529308 2.482269 2.433886 2.384119 2.33293 2.280278 2.226121 2.170416 2.113119 2.054184 1.993564 1.931212
2.619501 2.57504 2.529308 2.482269 2.433886 2.384119 2.33293 2.280278 2.226121 2.170416 2.113119 2.054184 1.993564
2.662727 2.619501 2.57504 2.529308 2.482269 2.433886 2.384119 2.33293 2.280278 2.226121 2.170416 2.113119 2.054184
2.704751 2.662727 2.619501 2.57504 2.529308 2.482269 2.433886 2.384119 2.33293 2.280278 2.226121 2.170416 2.113119
2.745607 2.704751 2.662727 2.619501 2.57504 2.529308 2.482269 2.433886 2.384119 2.33293 2.280278 2.226121 2.170416
2.785329 2.745607 2.704751 2.662727 2.619501 2.57504 2.529308 2.482269 2.433886 2.384119 2.33293 2.280278 2.226121
2.823946 2.785329 2.745607 2.704751 2.662727 2.619501 2.57504 2.529308 2.482269 2.433886 2.384119 2.33293 2.280278
2.86149 2.823946 2.785329 2.745607 2.704751 2.662727 2.619501 2.57504 2.529308 2.482269 2.433886 2.384119 2.33293
2.897991 2.86149 2.823946 2.785329 2.745607 2.704751 2.662727 2.619501 2.57504 2.529308 2.482269 2.433886 2.384119
2.933478 2.897991 2.86149 2.823946 2.785329 2.745607 2.704751 2.662727 2.619501 2.57504 2.529308 2.482269 2.433886
2.967978 2.933478 2.897991 2.86149 2.823946 2.785329 2.745607 2.704751 2.662727 2.619501 2.57504 2.529308 2.482269
3.00152 2.967978 2.933478 2.897991 2.86149 2.823946 2.785329 2.745607 2.704751 2.662727 2.619501 2.57504 2.529308
3.034129 3.00152 2.967978 2.933478 2.897991 2.86149 2.823946 2.785329 2.745607 2.704751 2.662727 2.619501 2.57504
3.065833 3.034129 3.00152 2.967978 2.933478 2.897991 2.86149 2.823946 2.785329 2.745607 2.704751 2.662727 2.619501
3.096655 3.065833 3.034129 3.00152 2.967978 2.933478 2.897991 2.86149 2.823946 2.785329 2.745607 2.704751 2.662727

108
3.126621 3.096655 3.065833 3.034129 3.00152 2.967978 2.933478 2.897991 2.86149 2.823946 2.785329 2.745607 2.704751
3.155754 3.126621 3.096655 3.065833 3.034129 3.00152 2.967978 2.933478 2.897991 2.86149 2.823946 2.785329 2.745607
3.184078 3.155754 3.126621 3.096655 3.065833 3.034129 3.00152 2.967978 2.933478 2.897991 2.86149 2.823946 2.785329
3.211615 3.184078 3.155754 3.126621 3.096655 3.065833 3.034129 3.00152 2.967978 2.933478 2.897991 2.86149 2.823946
3.238386 3.211615 3.184078 3.155754 3.126621 3.096655 3.065833 3.034129 3.00152 2.967978 2.933478 2.897991 2.86149
3.264413 3.238386 3.211615 3.184078 3.155754 3.126621 3.096655 3.065833 3.034129 3.00152 2.967978 2.933478 2.897991
3.289718 3.264413 3.238386 3.211615 3.184078 3.155754 3.126621 3.096655 3.065833 3.034129 3.00152 2.967978 2.933478
3.314319 3.289718 3.264413 3.238386 3.211615 3.184078 3.155754 3.126621 3.096655 3.065833 3.034129 3.00152 2.967978
3.338236 3.314319 3.289718 3.264413 3.238386 3.211615 3.184078 3.155754 3.126621 3.096655 3.065833 3.034129 3.00152
3.361489 3.338236 3.314319 3.289718 3.264413 3.238386 3.211615 3.184078 3.155754 3.126621 3.096655 3.065833 3.034129
3.384095 3.361489 3.338236 3.314319 3.289718 3.264413 3.238386 3.211615 3.184078 3.155754 3.126621 3.096655 3.065833
3.406073 3.384095 3.361489 3.338236 3.314319 3.289718 3.264413 3.238386 3.211615 3.184078 3.155754 3.126621 3.096655
3.427441 3.406073 3.384095 3.361489 3.338236 3.314319 3.289718 3.264413 3.238386 3.211615 3.184078 3.155754 3.126621
3.448215 3.427441 3.406073 3.384095 3.361489 3.338236 3.314319 3.289718 3.264413 3.238386 3.211615 3.184078 3.155754
3.468411 3.448215 3.427441 3.406073 3.384095 3.361489 3.338236 3.314319 3.289718 3.264413 3.238386 3.211615 3.184078
3.488047 3.468411 3.448215 3.427441 3.406073 3.384095 3.361489 3.338236 3.314319 3.289718 3.264413 3.238386 3.211615
3.507136 3.488047 3.468411 3.448215 3.427441 3.406073 3.384095 3.361489 3.338236 3.314319 3.289718 3.264413 3.238386
3.525695 3.507136 3.488047 3.468411 3.448215 3.427441 3.406073 3.384095 3.361489 3.338236 3.314319 3.289718 3.264413
3.543739 3.525695 3.507136 3.488047 3.468411 3.448215 3.427441 3.406073 3.384095 3.361489 3.338236 3.314319 3.289718
3.561281 3.543739 3.525695 3.507136 3.488047 3.468411 3.448215 3.427441 3.406073 3.384095 3.361489 3.338236 3.314319
3.578335 3.561281 3.543739 3.525695 3.507136 3.488047 3.468411 3.448215 3.427441 3.406073 3.384095 3.361489 3.338236
3.594916 3.578335 3.561281 3.543739 3.525695 3.507136 3.488047 3.468411 3.448215 3.427441 3.406073 3.384095 3.361489
3.611036 3.594916 3.578335 3.561281 3.543739 3.525695 3.507136 3.488047 3.468411 3.448215 3.427441 3.406073 3.384095
3.626708 3.611036 3.594916 3.578335 3.561281 3.543739 3.525695 3.507136 3.488047 3.468411 3.448215 3.427441 3.406073
3.641944 3.626708 3.611036 3.594916 3.578335 3.561281 3.543739 3.525695 3.507136 3.488047 3.468411 3.448215 3.427441
3.656757 3.641944 3.626708 3.611036 3.594916 3.578335 3.561281 3.543739 3.525695 3.507136 3.488047 3.468411 3.448215
3.671158 3.656757 3.641944 3.626708 3.611036 3.594916 3.578335 3.561281 3.543739 3.525695 3.507136 3.488047 3.468411
3.68516 3.671158 3.656757 3.641944 3.626708 3.611036 3.594916 3.578335 3.561281 3.543739 3.525695 3.507136 3.488047
3.698772 3.68516 3.671158 3.656757 3.641944 3.626708 3.611036 3.594916 3.578335 3.561281 3.543739 3.525695 3.507136
3.712006 3.698772 3.68516 3.671158 3.656757 3.641944 3.626708 3.611036 3.594916 3.578335 3.561281 3.543739 3.525695
3.724872 3.712006 3.698772 3.68516 3.671158 3.656757 3.641944 3.626708 3.611036 3.594916 3.578335 3.561281 3.543739
3.73738 3.724872 3.712006 3.698772 3.68516 3.671158 3.656757 3.641944 3.626708 3.611036 3.594916 3.578335 3.561281
3.749541 3.73738 3.724872 3.712006 3.698772 3.68516 3.671158 3.656757 3.641944 3.626708 3.611036 3.594916 3.578335
3.761364 3.749541 3.73738 3.724872 3.712006 3.698772 3.68516 3.671158 3.656757 3.641944 3.626708 3.611036 3.594916
3.772859 3.761364 3.749541 3.73738 3.724872 3.712006 3.698772 3.68516 3.671158 3.656757 3.641944 3.626708 3.611036
3.784034 3.772859 3.761364 3.749541 3.73738 3.724872 3.712006 3.698772 3.68516 3.671158 3.656757 3.641944 3.626708
3.794898 3.784034 3.772859 3.761364 3.749541 3.73738 3.724872 3.712006 3.698772 3.68516 3.671158 3.656757 3.641944
3.805461 3.794898 3.784034 3.772859 3.761364 3.749541 3.73738 3.724872 3.712006 3.698772 3.68516 3.671158 3.656757
3.81573 3.805461 3.794898 3.784034 3.772859 3.761364 3.749541 3.73738 3.724872 3.712006 3.698772 3.68516 3.671158
3.825713 3.81573 3.805461 3.794898 3.784034 3.772859 3.761364 3.749541 3.73738 3.724872 3.712006 3.698772 3.68516
3.83542 3.825713 3.81573 3.805461 3.794898 3.784034 3.772859 3.761364 3.749541 3.73738 3.724872 3.712006 3.698772
3.844856 3.83542 3.825713 3.81573 3.805461 3.794898 3.784034 3.772859 3.761364 3.749541 3.73738 3.724872 3.712006
3.854031 3.844856 3.83542 3.825713 3.81573 3.805461 3.794898 3.784034 3.772859 3.761364 3.749541 3.73738 3.724872
3.86295 3.854031 3.844856 3.83542 3.825713 3.81573 3.805461 3.794898 3.784034 3.772859 3.761364 3.749541 3.73738
3.871621 3.86295 3.854031 3.844856 3.83542 3.825713 3.81573 3.805461 3.794898 3.784034 3.772859 3.761364 3.749541

109
3.880052 3.871621 3.86295 3.854031 3.844856 3.83542 3.825713 3.81573 3.805461 3.794898 3.784034 3.772859 3.761364
3.888248 3.880052 3.871621 3.86295 3.854031 3.844856 3.83542 3.825713 3.81573 3.805461 3.794898 3.784034 3.772859
3.896217 3.888248 3.880052 3.871621 3.86295 3.854031 3.844856 3.83542 3.825713 3.81573 3.805461 3.794898 3.784034
3.903964 3.896217 3.888248 3.880052 3.871621 3.86295 3.854031 3.844856 3.83542 3.825713 3.81573 3.805461 3.794898
3.911496 3.903964 3.896217 3.888248 3.880052 3.871621 3.86295 3.854031 3.844856 3.83542 3.825713 3.81573 3.805461