Decentralized Model Order Reduction of Linear Networks with Massive Ports Boyuan Yan, Lingfei Zhou,...
26
Decentralized Model Order Reduction of Linear Networks with Massive Ports Boyuan Yan, Lingfei Zhou, Sheldon X.-D. Tan, Jie Chen University of California, Riverside Bruce McGaughy Cadence Design Systems Inc.
-
Upload
evan-harmon -
Category
Documents
-
view
214 -
download
0
Transcript of Decentralized Model Order Reduction of Linear Networks with Massive Ports Boyuan Yan, Lingfei Zhou,...

Decentralized Model Order Reduction of Linear Networks with Massive Ports
Boyuan Yan, Lingfei Zhou, Sheldon X.-D. Tan, Jie Chen
University of California, Riverside
Bruce McGaughy
Cadence Design Systems Inc.

Outline
Model order reduction Measure of interaction Decentralized model order reduction Examples Conclusion

RLC circuit model
L
s
s
LL
i
V
V
V
u
i
i
V
V
V
RR
RR
i
V
V
V
L
C
3
2
1
3
2
1
3
2
1
0001
0
0
0
1
0110
1000
1011
0011
000
000
0000
00001v 2v 3v
1bi
3bi
2bi
R LCsi sv
State-space model (MNA)
Transfer function
C G B
LT
C BLT Gs+Y (s) = ( )-1 U (s)
H (s) Frequency
|H(s)|

Model order reduction (MOR)
C BLT Gs +H (s) = ( )-1
BrLrT Gr
s+Hr (s) = ( )-1Cr
G V
VTGr
How to pick a projection matrix V
C V
VTCr
Br
B
VT
LT
VLr
T
such that H (s) ≈ Hr(s)To find

V
Moment-matching
Taylor expansion:
M0LT s+H (s) = ( )M1 + M2 s2 …
M0 M1 M2
Frequency
Magnitude Hr(s)H(s)
Projection matrix:
V=

Krylov subspace method
M0LT s+H (s) = ( )M1 + M2 s2 …
Km( A, R ) = span( A, A2R,…Am-1R)
= K m(G-1C,G-1B)M0 M1 M2span ( )… Mm-1
Lanzos, Arnoldi: [Feldmann, TCAD 95, Silveira, ICCAD 96, Odabasioglu, TCAD 98]
M0=G-1B M1=(G-1C)G-1B Mk=(G-1C)kG-1B… Moments formula:
Krylov subspace:
To find an orthogonal basis V for Krylov subspace:

A fundamental problem
M0 M1 M2V = M0 M1 M2V =B B
EKS [Wang, DAC 00] Dependent on input
SVDMOR [Feldmann, DATE 04, ICCAD 04] Still not compact enough
Problem: Centrality Each input-output pair is implicitly assumed to be equally interacted!
Explore input information as well as system information:
Explore system information only:
Existing solutions
MOR degrades as the number of inputs increases!

Motivation
u1
u2
y1
y2g22
g21
g12
y1 = g11u1 + g21u2
g11
G
Solution:1. Introduce some tools to measure interaction2. A decentralized framework is needed.
1 0.001

Outline
Model order reduction Measure of interaction Decentralized model order reduction Examples Conclusion

Relative gains
u1
u2
y1
y2g22
g21
g12
g11
Cr
Open loop gain:
Relative gain: If λ11=0 , y1 is NOT influenced by u1 at all
Δu1 Δy11
Δy21Δu2
g11|u2= |u2
Δy11
Δu1
Closed loop gain:
g11|y2= |y2
Δy11+ Δy21
Δu1
g11|u2
g11|y2
λ11 =
+ Δy21
If λ11=1 , y1 is influenced by u1 Only.

Relative gain array (RGA)
11 12 1
21 22 2
1 1
p
p
p p pp
Choose pairings corresponding to RGA elements close to 1
Columns and rows always sum to 1
u1
u2
u3
y1
y2
y3
Relative gain array:
Pairing in decentralized control:
0.176471 1.17647 0.
0.00297089 0.00713012 1.0101
1.17944 0.16934 0.010101
u1 u2 u3
y1
y2
y3
[Bristol, IEEE Trans. Automatic Control, 1966]

Scaled RGA
| | (| | 1)
1(| | 1)
| |
ij ij ij
ij ijij
Scaled to [0,1]:
The closer λij is to 1, the more important uj is in terms of yi
RGA
010
2030
40
0
10
20
30
400
0.2
0.4
0.6
0.8
1
OutputInput
Re
lative
ga
in
RGA in terms of one output (one row)
0 10 20 30 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Input
Re
lative
ga
in

( ) ( ) ( ) Ts H s H s
(0) (0) (0) TH H
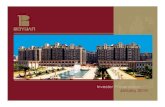
Computation of RGA
A function of frequency
Typically evaluated at zero frequency Higher frequency components tend to be more localized!
Pseudoinverse is used for non-square system
010
2030
40
0
10
20
30
400
0.2
0.4
0.6
0.8
1
s = 0
OutputInput
Re
lative
ga
in
010
2030
40
0
10
20
30
400
0.2
0.4
0.6
0.8
1
s = 1 GHz
Output Input
Re
lative
ga
in
RGA at DC is conservative and valid at higher frequencies

Outline
Model order reduction Measure of interaction Decentralized model order reduction Examples Conclusion

C BGs +H (s) = ( )-1
Decentralize
BrLrT Grs +Hir(s) = ( )-1Cr
MOR
Decentralized MOR framework
Partition the output matrix and decentralize the system into a set of subsystems corresponding to each output of interests.
LiT
LpT
L1T
:
:
C BGs +Hi(s) = ( )-1LiT
Spatial dominant Krylov subspace method
LT
:
:
:
:

C BGs +Hi(s) = ( )-1LiT
BrLirT Grs +Hir (s) = ( )-1Cr
0 10 20 30 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
K m(G-1C,G-1B)
Spatial dominant Krylov subspace
M0 M1 M2V =B M0Vi =Bi M1 M2
Bi
Spatial dominant: K m(G-1C,G-1Bi)
The moments of dominant inputs are exactly preserved. The energy transfers from other inputs are also coarsely preserved.

Electrical distance and locality
RC network can be viewed as a cascaded low-pass RC filter. Far away nodes have little electrical impact on each other beca
use of the attenuation. The voltage response at a node is only dominated by a small n
umber of inputs nearby.
RC network
Observed node
Dominant input
Minor input

Principle components in terms of both frequency and space
Existing MOR preserves the principle components in terms of frequency (time) only and ignores the other degree of freedom.
In decentralized MOR, the principle components are in terms of both frequency (time) and space.
As a result , the reduced model can be made much more compact!Observed node
Dominant input
Minor inputFrequency
Magnitude
Frequency (time)
Space
Projection subspace

Outline
Model order reduction Measure of interaction Decentralized model order reduction Examples Conclusion

Frequency domain evaluation
2 21 1( ) ( )
p p
j r jj jh s h s
11 12 1
21 22 2
1 1
( ) ( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )
p
p
p p pp
h s h s h s
h s h s h sH s
h s h s h s
2 21 22 2( ) ( ) ( ) ( )r r r r pH s h s h s h s
Original transfer function matrix:
Reduced transfer function matrix corresponding to 2nd output:
Instead of comparing each element in the transfer function matrix, we compare the sum of the corresponding row.
We hope

0 5 10 15 20 25 30 350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Port
RG
AA simple RC mesh
105
106
107
108
109
1010
1011
-50
-40
-30
-20
-10
0
10
20
30
40
50
Frequency (Hz)
Ma
gn
itud
e (
dB
)
Original
PRIMA
DeMOR
0 1 2 3 4 5 6
x 10-11
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Time (s)
Vo
ltag
e (
V)
Original
PRIMADeMOR
Node #: 1600Port #: 33Reduced order : 7Dominant input #: 1Expansion point: 0 Hz

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-10
0
0.5
1
1.5
2
2.5
TIme (s)
Vo
ltag
e (
V)
Original
PRIMA 8
PRIMA 100
PRIMA 200
DeMOR 8
A larger RC mesh
Nodes: 10000Ports: 100Reduced order : 8Dominant inputs: 2Expansion point: 0 Hz
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Port
RG
A

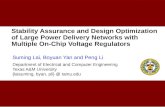
An RLC mesh
Node #: 17500Port #: 250Reduced order : 400Dominant input #: 10Expansion point: 10 GHz
0 50 100 150 200 2500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Port
RGA
Since RLC circuit is less localized and much more complicated, it is really hard to match the wide-band frequency response!
100
102
104
106
108
1010
1012
-120
-100
-80
-60
-40
-20
0
20
40
60
Frequency (Hz)
Ma
gn
itud
e (
dB
)
Original
PRIMA
DeMOR

Outline
Model order reduction Measure of interaction Decentralized model order reduction Examples Conclusion

Conclusion
Propose a decentralized model order reduction framework.
Introduce relative gain array to evaluate the relative importance of ports.
Propose the concept of spatial dominant subspace to create one more degree of freedom in addition to frequency.
The proposed method can take advantage of parallel computation in modeling and simulation.
The proposed method is more efficient if only a small number of nodes are to be observed.

Thank You!