C:/Users/Ian Cassidy/Documents/Class Docs/Grad/Research ...
22
Design and experimental characterization of an electromechanical transducer for large-scale vibratory energy harvesting applications Ian L. Cassidy a,∗ , Jeffrey T. Scruggs a , Sam Behrens b , Henri P. Gavin a a Dept. of Civil & Environmental Engineering, Duke University, Durham, NC, USA b CSIRO Energy Centre, PO Box 330, Newcastle, New South Wales 2300, Australia Abstract This paper reports on the design and experimental characterization of electromagnetic trans- ducers for energy harvesting from large-scale civil structures, for which the power levels can be above 100W, and disturbance frequencies below 1Hz. The transducer consists of a back-driven ballscrew, coupled to a permanent-magnet synchronous machine, with power harvesting regulated via control of a four-quadrant power electronic drive. Design tradeoffs between the various subsys- tems (including the controller, electronics, machine, mechanical conversion, and structural system) are illustrated, and an approach to device optimization is presented. Developing control algorithms to take full advantage of the unique features of this type of transducer requires a mechanical model that can adequately characterize the device’s intrinsic nonlinear behavior. A new model is pro- posed that can effectively capture this behavior. Comparison with experimental results verifies that the model is accurate over a wide range of operating conditions and can be used to assess the viability of the technology, and also to correctly design controllers to maximize power genera- tion. To demonstrate the energy harvesting capability of the device, impedance matching theory is used to optimize the power generated from a small, base-excited tuned mass damper (TMD). Both theoretical and experimental investigations are compared and the results are shown to match closely. Keywords: Energy harvesting, vibration, mechatronics, impedance matching 1. Introduction Large-scale electromechanical transduction in vibrating civil structures has a number of useful applications. Most immediate among these is their use in large-scale energy harvesting applications, in which the vibratory energy in a structure, when excited by its surrounding environment, is converted and stored for use by electronic subsystems. Such environmental disturbances may include, for example, wind excitations on buildings, wave excitations on offshore structures, traffic- induced vibrations in bridges, and seismic events [1, 2]. Such systems also have application in vehicles, including automotive suspensions [3] and railway systems [4]. The energy harvested from these vibrations can be used to power wireless sensing networks and other intelligent systems for structural health monitoring [5, 6]. It can also be used to provide parasitic power for semiactive structural control devices, such as magnetorheological dampers [7]. * Further author information: E-mail: [email protected], Telephone: (919) 660-5200 Preprint submitted to Journal of Intelligent Material Systems and Structures May 2, 2011
Transcript of C:/Users/Ian Cassidy/Documents/Class Docs/Grad/Research ...

Design and experimental characterization of an electromechanical
transducer for large-scale vibratory energy harvesting applications
Ian L. Cassidya,∗, Jeffrey T. Scruggsa, Sam Behrensb, Henri P. Gavina
aDept. of Civil & Environmental Engineering, Duke University, Durham, NC, USAbCSIRO Energy Centre, PO Box 330, Newcastle, New South Wales 2300, Australia
Abstract
This paper reports on the design and experimental characterization of electromagnetic trans-ducers for energy harvesting from large-scale civil structures, for which the power levels can beabove 100W, and disturbance frequencies below 1Hz. The transducer consists of a back-drivenballscrew, coupled to a permanent-magnet synchronous machine, with power harvesting regulatedvia control of a four-quadrant power electronic drive. Design tradeoffs between the various subsys-tems (including the controller, electronics, machine, mechanical conversion, and structural system)are illustrated, and an approach to device optimization is presented. Developing control algorithmsto take full advantage of the unique features of this type of transducer requires a mechanical modelthat can adequately characterize the device’s intrinsic nonlinear behavior. A new model is pro-posed that can effectively capture this behavior. Comparison with experimental results verifiesthat the model is accurate over a wide range of operating conditions and can be used to assessthe viability of the technology, and also to correctly design controllers to maximize power genera-tion. To demonstrate the energy harvesting capability of the device, impedance matching theoryis used to optimize the power generated from a small, base-excited tuned mass damper (TMD).Both theoretical and experimental investigations are compared and the results are shown to matchclosely.
Keywords: Energy harvesting, vibration, mechatronics, impedance matching
1. Introduction
Large-scale electromechanical transduction in vibrating civil structures has a number of usefulapplications. Most immediate among these is their use in large-scale energy harvesting applications,in which the vibratory energy in a structure, when excited by its surrounding environment, isconverted and stored for use by electronic subsystems. Such environmental disturbances mayinclude, for example, wind excitations on buildings, wave excitations on offshore structures, traffic-induced vibrations in bridges, and seismic events [1, 2]. Such systems also have application invehicles, including automotive suspensions [3] and railway systems [4]. The energy harvested fromthese vibrations can be used to power wireless sensing networks and other intelligent systems forstructural health monitoring [5, 6]. It can also be used to provide parasitic power for semiactivestructural control devices, such as magnetorheological dampers [7].
∗Further author information: E-mail: [email protected], Telephone: (919) 660-5200
Preprint submitted to Journal of Intelligent Material Systems and Structures May 2, 2011

The last decade has seen a surge of interest in vibratory energy harvesting [8, 9], but most ofthis research has been motivated by vibration applications in the aerospace sector, and is focused onvibratory regimes characterized by frequencies above 10Hz, displacement oscillations on the orderof millimeters, and power on the scale of milliwatts (or below). For such applications, piezoelectrictransducers have been the dominant technology, although electrostatic [10] and electromagnetic[11] MEMS transducers have also seen significant attention. In contrast to these applications,the vibratory regime typical of a large-scale (e.g., buildings and bridges) structure oscillating inits fundamental mode is typically below 1Hz, and the available power can be on the kilowattscale. Transducers to extract this energy must therefore be capable of extracting significant powerfrom low-frequency, low-velocity oscillations. Operation in this vibratory regime thus requires verydifferent electromechanical hardware than in higher-frequency, lower-power applications.
This paper reports on the design, testing, and modeling of an electromagnetic transducercapable of generating over 100W of power from sub-Hertz structural vibration, and with a forcerating of 1kN. While this system is a scaled-down version of a system which would be appropriate forfull-scale civil structure applications, it serves as a bench-scale demonstration of the technology.The basic conversion system consists of a back-driven precision ballscrew, which is coupled tothe shaft of a three-phase, permanent-magnet synchronous machine. The machine terminals areinterfaced with a three-phase active power electronic drive, which delivers harvested energy to apower bus. This work is an extension of [12], which presents a basic experimental demonstrationof the same device used in this study. However, detailed models of the electrical and mechanicaldynamics of the device are not investigated.
The first contribution of this paper is an approach to the system-level design of a ballscrewtransducer. The design process accounts for the interdependency of the electronics, electronic con-troller, machine parameters, mechanical conversion system, and the characteristics of the structureinto which the system is to be embedded. Four dimensionless design metrics are developed andare evaluated for the transducer used in the experimental portion this study. Recommendations interms of minimal threshold values are made for each design metric. Design techniques for linearelectromagnetic energy harvesters have been studied by Zuo et al [3]. In that study, it is shownthat the magnetic flux intensity of the device can be improved using finite element modeling of thecoil and magnet assemblies. Additional studies [13, 14] have examined the capability of electro-magnetic actuators to be used as dampers by dissipating the absorbed energy in various electricalsubsystems. In particular, the study by Palomera-Arias et al [14] provides a detailed theoreticalmodel for a linear electromagnetic actuator, which could be used to design similar actuators forstructural control or energy harvesting applications.
Evaluating the usefulness of a ballscrew transducer to harvest energy from large-scale structuresrequires the development of a high-fidelity model for use in feedback design and analysis. Thistask is challenging because the device is nonlinear. Several studies have developed analogousapproaches to the one taken here, for characterizing the nonlinearities in magnetorheological (MR)devices [15, 16] as well as in electrorheological (ER) devices [17, 18, 19] for semi-active controlapplications. The nonlinearities that arise in MR and ER dampers are mainly due to the yieldingstress of the fluid. However, the nonlinearities present in the proposed device are a result of thesliding friction of the ballscrew. In addition, hysteresis in the force-velocity plane is observed,which can be attributed to the elasticity of the timing belt that connects the ballscrew to the shaftof the synchronous machine. Considering these effects, a new model is proposed that is numericallytractable and effectively portrays the behavior of the ballscrew device. Based on experimental data
2

over a range of frequencies, a Levenberg-Marquardt nonlinear curve fitting technique is employedto determine the optimal parameters for the analytical model. Comparison with the data validatesthat the model is accurate over a wide range of operating conditions.
The final section of this paper focuses on the derivation of an analytical expression for theaverage power generated by the device when the terminals of the motor are connected to resistiveshunts. This expression can be used to determine the impedance matched resistive load for thecase in which the transducer is embedded within a tuned mass damper (TMD). Harvesting powerfrom TMD’s in large buildings is showing potential for energy harvesting applications [20, 21] asa viable source of renewable energy. Furthermore, impedance matching techniques for electrome-chanical systems are well understood in the literature [22]. Several studies [23, 24] have utilizedpower electronic drives to simulate impedance matched loads for piezoelectric energy harvestingapplications. In addition, Ward and Behrens [25] investigated adaptively updating the optimaladmittance of an electromagnetic energy harvester that was subjected to step disturbances. Theadaptive admittance was determined through machine learning and was experimentally imple-mented via a four-quadrant bridge rectifier. Our approach to designing the matched impedancetakes the identified viscous damping and Coulomb friction present in the transducer into account.The analytical expression for average power generated is compared to our experimental system inwhich a TMD is simulated using hybrid testing.
2. Device Modeling
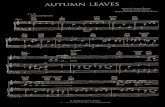
An illustration of the electromechanical device to be characterized in this paper is presentedin Fig. 1(a). Linear-to-rotational conversion is accomplished via a precision ballscrew. Suchdevices (as well as planetary roller screws) constitute one of the most efficient methods of linear-to-rotational conversion when power flow is in the direction from linear to rotational motion, andwhen high mechanical advantage is important. The particular ball screw mechanism used here isa Thomson EC3 unit. It has a lead of 16 mm/rev, and a diameter of 16mm, resulting in a helicalangle of approximately 17 degrees. The force rating on the screw is 7.2 kN, well in excess of theforce range for the experiments in this paper. The ballscrew is interfaced with the motor shaft viaa timing belt with a 1:1 ratio. The configuration shown, in which the motor is placed in tandemwith the screw, was chosen because it allowed for easier mounting of the device at either end viaclevis brackets. However, a custom configuration in which the motor shaft is mounted directlyto the rotating screw, and which also permits a clevis bracket to be mounted behind the motorhousing, would reduce the need for the timing belt and also reduce Coulomb friction in the systemby reducing side-loads on both rotating shafts.
The linear velocity x of the device is related to its mechanical angular velocity θm via the leadconversion; i.e.,
x = lθm (1)
where l is in m/rad. The linear-to-rotational conversion of the ballscrew can be modeled as relatingthe linear force f to the electromechanical fe of the motor, via the equation
f = fe + fb +J
l2x+
B
l2x (2)
where the sign convention is that f and x have the same directional sense. In the above expression,B and J are the rotational viscosity and inertia, respectively, of the combined motor shaft and
3

screw, and fb is the nonlinear damping force associated with the bearing friction of the ballscrewThus, for the remainder of this study we will express the total device force as
f = fe + fd (3)
where fd includes the inertia, viscous damping, and bearing friction of the ballscrew as well asother characteristics of the device. A detailed model describing this term is further discussed inSection 4.
The motor itself is a Kollmorgen AKM42E permanent-magnet synchronous motor. The motoris three-phase and has a polarity p = 5 [26]. The choice of a rotary three-phase AC motor (asopposed to a rotary DC motor or a linear motor) was made based on practical considerations.Generally, for motors with comparable power ratings, ones with higher velocity (and lower torque)capability tend to be less massive, as they require less iron to sustain the necessary magneticfield. This becomes even more pronounced in the comparison between rotary and linear motorsof comparable power ratings. Additionally, rotary synchronous three-phase machines are almostalways more efficient as power generators, because they can generate a larger back-emf for a givenmechanical velocity, while also possessing a lower coil resistance.
The internal voltages (i.e., back-emfs) for phases a, b, and c, relative to the neutral node n, canbe expressed as a function of the mechanical angle θm, as
ean = Keθm cos (pθm) (4a)
ebn = Keθm cos
(
pθm +2π
3
)
(4b)
ecn = Keθm cos
(
pθm − 2π
3
)
(4c)
where Ke is the back-emf constant. Let the line-to-neutral voltages at the terminals of the threephases be van, vbn, and vcn. Ultimately, these voltages will be imposed by the circuitry to beattached to the motor. Then the line current emanating from phase a, as seen in Fig. 1(b), of themachine evolves according to
ddt ia =
1
L(−Ria + van − ean) (5)
where L and R are the line-to-neutral inductance and resistance, respectively, of the motor. Anal-ogous equations hold for the b and c phases. Thus, in matrix form, we have that the equations
leads a, b, c, n
PM-synchronous
machinetiming
belt
nut, bearings lead screw
f, x
ean
L R+ −
ecn
L R+ −
ebn
L R+ − b
a
c
n
ib
ia
ic
(a) (b)
Figure 1: (a) Illustration of the electromechanical transducer, consisting of a back-driven ballscrew and a permanentmagnet synchronous machine; (b) equivalent electrical schematic for the three-phase machine.
4

describing the dynamics of the three phase machine are
ddt iabc =
1
L(−Riabc + vabc − eabc) (6)
where iabc, vabc, and eabc are vectors of the line-to-neutral currents, voltages, and back-emfs, re-spectively.
It is convenient to express the dynamics of a three-phase machine in terms of quadrature, direct,zero coordinates. The line coordinates (i.e., a, b, and c) can be converted to quadrature, direct,and zero coordinates (i.e., q, d, and 0) via the Park transformation [27]; i.e.,
P (θm) =
cos (pθm) cos(
pθm + 2π3
)
cos(
pθm − 2π3
)
sin (pθm) sin(
pθm + 2π3
)
sin(
pθm − 2π3
)
12
12
12
. (7)
Thus, we can define the vector of quadrature, direct, and zero currents as a linear transformationfrom the line currents; i.e.,
iqd0 = P (θm)iabc . (8)
Similarly, for the quadrature, direct, and zero voltages, we have that
vqd0 = P (θm)vabc . (9)
Substituting the transformation for the current vector in (8) into (6) results in
ddt iqd0 − pθmQiqd0 =
1
L(−Riqd0 + vqd0 + P (θm)eabc) (10)
where the matrix Q is defined as
Q =
(
∂
∂θmP (θm)
)
P−1(θm) =
0 −1 01 0 00 0 0
. (11)
We now have three nonlinear differential equations that describe the dynamics of the motor interms of the quadrature, direct, and zero coordinates. In this case these equations are
ddt iq =
1
L
(
−Riq + vq − pθmLid +3Ke
2˙θm
)
(12)
ddt id =
1
L
(
−Rid + vd + pθmLiq
)
(13)
ddt i0 =
1
L(−Ri0 + v0) . (14)
For all of the applications described in the paper, the line coordinates will be taken with respectto the neutral node. At the neutral node of the motor, the sum of the line currents is zero (i.e.,ia + ib + ic = 0). Thus, due to the third row of the Park transformation, we have that the i0 = 0,and the equation describing the dynamics of the zero current in (14) can be eliminated from theelectrical system. We now consider the case in which the transducer will ultimately be used inan application as shown in Fig. 2. As shown, the transducer is attached to a single-degree-of-freedom (SDOF) oscillator with mass m, damping d, and stiffness k. One of the simplest ways to
5

x
fd
a
ms
ks
cs
RL
RL
RL
Figure 2: Diagram of an electromechanical transducer attached to a base-excited SDOF oscillator and connected toresistive loads.
harvest power from this application is to have the electronics simulate resistive loads RL acrossthe terminals of the motor. This can be realized by simply attaching three resistive loads in astar connection to the motor, which is illustrated in Fig. 2. With this configuration, we have thatvabc = −RLiabc, and consequently vqd0 = −RLiqd0. As such, the equations describing the iq and idcan be expressed as
ddt iq =
1
L
(
−(R+RL)iq − pθmLid +3Ke
2θm
)
(15)
ddt id =
1
L
(
−(R+RL)id + pθmLiq
)
. (16)
In order to linearize the system, we make the assumption that id ≈ 0 under normal operatingconditions. This assumption can be validated by assuming that θm is slowly-varying and solvingfor the equilibrium of iq and id. In this case, we have that the equilibrium solutions are
iq =3Ke(R+RL)θm
2(R+RL)2 + 2(Lpθm)2(17)
id =3KeLpθ
2m
2(R+RL)2 + 2(Lpθm)2. (18)
From these expressions, we have that the dynamics of id can be neglected as long as pθm <(R + RL)/L. For the experiments presented in this paper, the load resistance RL will never bebelow the line resistance R. As such, if we conservatively make RL = R, then, in terms of thelinear velocity of the device, the dynamics of id can be neglected as long as x is below 27.2 cm/s.If the device were run at higher velocities, then vector control [27] using velocity feedback wouldhave to be implemented to correct for the effects of id in the electrical system. The assumptionthat id ≈ 0 is further justified by recognizing that the direct current does not directly contributeto power conversion. Using the simplifications that i0 = 0 and id = 0, we have that the differentialequation describing iq is
ddt iq =
1
L
(
−(R+RL)iq +3Ke
2θm
)
. (19)
This expression is analogous to the electrical dynamics of a single phase machine. As such, we havethat the electromechanical force that can be applied by the device is proportional to the quadraturecurrent and can be expressed as
fe =3Ke
2liq . (20)
6

Next, we can substitute the relationship that the quadrature current is equal to the quadratureback-emf voltage in (19) divided by the total resistance (i.e., R+RL). Therefore, we have that theelectromechanical force can be expressed as a function to the linear velocity of the device; i.e.,
fe = cex (21)
where
ce =9K2
e
4l2(R+RL). (22)
We can think of ce as the equivalent electromechanical viscous damping term associated withconnecting resistive loads across the terminals of the motor.
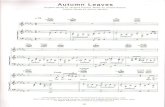
Harvesting power from the resistive load configuration in Fig. 2 can be accomplished by con-necting the three-phase machine to a servo drive, which interfaces the machine with a DC powerbus (also called a “DC link”). The block diagram in Fig. 3 demonstrates this concept. Theparticular three-phase servo drive that is used in this paper is an S16A8 analog servo drive fromAdvanced Motion Controls. One of the main advantages for using a drive of this nature is that it iscapable of four quadrant regenerative operation. The servo drive requires command signals for twoof the phases (denoted by i∗a and i∗b) and determines the command for the third phase by enforcingthe fact that the sum of the line currents is equal to zero. Tracking of the desired command signalsis accomplished through high-frequency pulsewidth modulation (PWM) switching control of sixMOSFETs. The switching frequency of the MOSFETs has been set at 33kHz. Line-to-neutralvoltages of two of the phases are sensed with analog differential amplifiers and the output voltagesmeasurements are then sent to a dSpace DS1103 data acquisition system. In dSpace, the line-two-neutral voltages are divided by the desired load resistance and the resulting current commandsignals are sent to the servo drive.
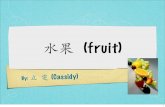
To demonstrate the force capability of the device, the servo drive is used to simulated variousresistive loads for a sinusoidal displacement input. The device is back-driven with 0.1 Hz displace-ment with an amplitude of 7.5 cm and the results are presented in Fig. 4. Resistance values of 30Ω, 9 Ω, and 3 Ω in addition to the open circuit case were chosen to illustrate the full force range
ia
ib
+
−
VB
CB
+
−
VP
Gate drives
Step-down
coverter
PI control &
switch logic
+
+
−
−
+− +−
Logic
power
PWM signals
-1-1
van
vbn
dSpace DS1103
AMC S16A8 servo drive
ia
*
ib
*
RL
RL
Three-phase
motor
Figure 3: Block diagram of the three-phase motor interface with an analog servo drive.
7

0 2 4 6 8 10 12 14 16 18 20−1200
−800
−400
0
400
800
1200
time (s)
forc
e (
N)
−5 −2.5 0 2.5 5−1200
−800
−400
0
400
800
1200
velocity (cm/s)
forc
e (
N)
open
R = 30 Ω
R = 9 Ω
R = 3 Ω
−8 −4 0 4 8−1200
−800
−400
0
400
800
1200
displacement (cm)
forc
e (
N)
(a)
(b) (c)
Figure 4: Experimentally measured transducer force for various load resistances simulated by the servo drive: (a)force versus time; (b) force versus displacement; (c) force versus velocity.
of the device at this velocity. During the 3 Ω test, the measured force is close to exceeding themaximum force rating for the device. It should be noted that the hysteresis plots in Fig. 4(b) ap-pear to exhibit predominately viscous damping behavior, with a Coulomb friction force threshold.The high frequency oscillations that are present in each test are due to the bearing friction in theballscrew. A detailed model describing these effects is presented in Section 4. Resistance controlcould be used to compensate for the oscillations in the hysteresis plots, due to spatially-dependentCoulomb friction. However, this issue is beyond the scope of this paper, which is limited to a basiccharacterization and demonstration of the device.
3. Design Tradeoffs
The efficacy of the type of electromechanical transducer, as described here, will depend quiteheavily on the combination of parameters for the screw conversion, motor, electronics, and thecharacteristics of the SDOF oscillator. It is important that all these components be taken intoaccount in the design, especially because the combinations of parameters leading to the transducerseffective use as a generator are very different from those that would be chosen to operate it as anactuator for position tracking, which is its conventional usage. In particular, there are severalcriteria which should be met for the device to operate as intended.
• Damping capability: The quantity
cshorte =9K2
e
4Rl2(23)
is approximately equal to the effective linear viscous damping contributed by the machine,when its terminals are shorted (i.e., when van = vbn = vcn = 0). When multiplied by thesquare of the linear velocity, this gives the maximum rate at which mechanical power can be
8

extracted by the device (at a given v), before the internal dissipation in the motor exceedspower extraction. It is therefore the quantity most closely connected with the efficiency withwhich a combination of screw conversion (i.e., l) and machine (i.e., Ke and R) can managea given amount of mechanical power. A good indicator of whether the hardware is properlysized for the application is therefore a measure of the fraction of critical damping imposedon the SDOF oscillator with this maximum viscosity imposed; i.e.,
ζmax =cshorte
2√km
. (24)
For effective energy harvesting, the effective linear viscous damping imposed by the deviceshould be considerably below cshorte . Therefore, the fraction of critical damping desired for theSDOF oscillator should be considerably below ζmax. As such, we define the first performanceindex for the device as
Ic = ζmax (25)
with high values being more favorable. If the transducer is being used in structural controlapplications, ζmax should be made as high as possible to give the device a wide range ofvariable damping.
• Force capability: The maximum force rating for the entire device will be approximately
f rat = minf ratscrew,
1l T
rate (26)
where f ratscrew is the rated axial load of the screw and T rat
e is the rated torque of the machine.Technically, if the device is being back-driven, the effective force rating can be amplifiedby a factor of 1/η. This force should be sizable enough to have significant influence overthe dynamics of the oscillator. So, for example, if the SDOF oscillator is excited by abase excitation near resonance with acceleration amplitude A0, then a helpful index for thesuitability of the device is the fraction
If =f rat
mA0
. (27)
Clearly, a higher value of If affords more control capability over the mass.
• Velocity amplification: Consider the case in which the servo drive in Fig. 3 is replacedby a full bridge diode rectifier. The diodes have a conduction voltage vd, which must beovercome by the back-emfs, before power can be transferred from the machine to the DCbus. This voltage threshold is almost unavoidable in power-electronics (unless the diodes arereplaced with mechanical relays), and will persist even if more sophisticated electronics areused to control power extraction. As such, for the typical velocities to be experienced by thetransducer, the voltages need to exceed this threshold by a comfortable margin. To evaluatethis, we need to specify a design velocity, x0, for the transducer. Then, we define the index
Iv =3Kex02vdl
. (28)
This fraction is equal to 1 if the back-emfs are just large enough to result in continuousconduction through the diode rectifier for their entire oscillatory cycle. Clearly, a suitabledevice should have Iv ≫ 1.
9

Parameter Value Parameter Value
Ke 0.77 N-m/A B 1.2×10−4 N-m-sR 2.41 Ω cshorte 85130 N-s/mL 8.93×10−3 H f rat 1076 Nl 2.55×10−3 m/rad m 3000 kgf ratscrew 7.2 kN k 3×104 N/mT rate 2.74 N-m x0 0.16 m/s
vd 1.4 V A0 0.5 m/s2
J 1.5×10−4 N-m-s2 ω0 0.5 Hz
Table 1: Example design parameters for the EC3 ballscrew and AKM42E motor from Danaher Motion.
• Inertia suppression: The last criterion has to do with the fact that there is a finite rotaryinertia J in the system, and if the lead l is too small, this inertia will be reflected into thelinear dynamics as an equivalent mass J/l2, sizable enough so as to hamper the transducersdynamics. Indeed, this effect can often be the limiting factor in the choice of lead l. Thus,the index
Im =ml2
J(29)
is critical to the suitability of the transducer, and design parameters should be chosen suchthat Im ≫ 1.
For example, the transducer in Fig. 1(a) has relevant properties as listed in Table 1. Note thatthe design values are also given, for a 3000 kg mass with a 2 second natural period, driven by a 0.5m/s2 acceleration, with a design displacement of 5 cm. For these values, the four indices discussedabove are Ic, If , Iv, Im = 8.99, 0.717, 51.8, 130.
4. Experimental Characterization
4.1. Mechanical Model and Error Quantification
To illustrate the characteristics of the electromechanical transducer described above, experi-ments were conducted in which the transducer displacement was controlled via a hydraulic actua-tor, and various response quantities were measured. As previously discussed, it is known that theballscrew itself has some amount of inertia and viscous damping. In addition, sinusoidal oscilla-tions are present in the force-displacement plane and are due to the sliding friction force of theballscrew. In most applications of precision ballscrews (which are for the purpose of positioning)this force is compensated for, via feedback, and oftentimes its characteristics are not extensivelytested by manufacturers. Furthermore, hysteresis in the force-velocity plane can be seen at lowvelocities (i.e., as the motion of the ballscrew changes direction). Hysteresis effects have beenextensively studied in the literature and a common model used to describe this phenomenon is thethe Bouc-Wen model [28], which can exhibit a wide variety of hysteretic behavior. However, wehave found that the Bouc-Wen model is not able to accurately model the hysteretic effects over abroad range of frequencies, especially when its parameters are fit for experimental data at a singlefrequency. As such, we propose a mechanical model which is analytically tractable and accuratelymodels the hysteretic effect with a nonlinear spring.
Consider the mechanical model of the device in Fig. 5. The inertia and viscous damping thatare present in the ballscrew are represented by md and cd, respectively. In addition, we include
10

md
kd
cd
f
y x
fc
fbelt
cb
fbearings
ce
Figure 5: Proposed mechanical model of the electromagnetic transducer.
the linear spring kd and a Coulomb friction term fc to account for the stiffness and friction thatare present in the device. The additional degree-of-freedom represented by y and the rigid bar isrelated to the tandem mounting of the synchronous machine and the ballscrew via the timing belt.Because the timing belt has some elasticity, we can model this effect by a nonlinear spring; i.e.,
fbelt = kb1y + kb3y3 (30)
where kb1 and kb3 are spring constants. An additional viscous damper cb is added to this degree-of-freedom to account for viscous damping associated with the shaft of the motor. Finally, thebearing friction of ballscrew is modeled by a summation of two sinusoids that are a function ofdisplacement; i.e.,
fbearings =(
γ1 sin (λ1x+ φ1) + γ1 sin (λ1x+ φ1))
sgn (x) (31)
where λ1 = 1/l and λ2 = 2π/r. The distance r is the distance in the x-direction that a bearingtravels as it shifts over by one diameter length in the track of the ballscrew (assuming a no-slipcondition between the bearings and the track); i.e.,
r = 2d sin(β) (32)
where d is equal to the diameter of one bearing (i.e., d = 0.29 cm) and β is equal to the helicalangle of the ballscrew (i.e., β = 17).
To determine the analytical expression for the force fd, we start by balancing the forces aboutthe rigid bar; i.e.,
fbelt + cby = md (x− y) + cd (x− y) + kd (x− y) + fcsgn (x− y) . (33)
Next, solving (33) for y results in
y =1
md(mdx+ cd (x− y) + kd (x− y) + fcsgn (x− y)− fbelt − cby) (34)
where y and y can be found through numerical integration with the measurements x, x, and xtreated as inputs to the differential equation. The total force generated by the system can found
11

by summing the forces in the upper and lower sections of the system in Fig. 5. Thus, the totalforce can be expressed by
f = md (x− y) + cd (x− y) + kd (x− y) + fcsgn (x− y) + fbearings + cex (35a)
= fbelt + cby + fbearings + cex . (35b)
The parameters in this model are determined using a Levenberg-Marquardt [29, 30] nonlin-ear least squares method. Levenberg-Marquardt methods are appealing because they use bothgradient-descent and Gauss-Newton methods to minimize a least squares objective, which resultsin faster convergence times. To evaluate the statistical accuracy of the fit parameters, we computetheir asymptotic standard error. Standard parameter errors can be used to determine confidenceintervals for parameter values. First, we define the vector f ∈ R
m as the experimentally measuredforce, the vector f ∈ R
m as the predicted force using (35), and p ∈ Rn as the vector of fit pa-
rameters (in this case n = 11). Therefore, we have that the parameter covariance matrix can berepresented by
Σp =(
JTp WJp
)−1(36)
where Jp ∈ Rm×n is the Jacobian of the predicted force with respect to each parameter (i.e.,
Jp = ∂f/∂p) and W ∈ Rm×m is a diagonal weighting matrix where Wii = 1/w2
i . It should benoted that wi is equal to the mean square measurement error; i.e.,
w2i =
1
m− n+ 1(f − f)T (f − f), ∀i . (37)
The asymptotic standard error of parameter pi is just
σp =√
(Σp)ii . (38)
It is convenient to represent these standard errors as percentages. As such, we define the percentstandard error of each fit parameter pi as
ǫp =σppi
× 100 . (39)
In addition quantifying the statistical accuracy of the fitted parameters, we will also quantifythe errors between the experimentally measured force and the predicted force using the error normsdefined in [15]. In this study, error norms for time, displacement, and velocity can be calculatedby the following three expressions
Et =
(
∫ T0
(
f − f)2
dt
)1/2
(
∫ T0(f − µf )
2 dt)1/2
, Ex =
(
∫ T0
(
f − f)2
|x| dt)1/2
(
∫ T0(f − µf )
2 dt)1/2
, Ex =
(
∫ T0
(
f − f)2
|x| dt)1/2
(
∫ T0(f − µf )
2 dt)1/2
(40)
where µf is the mean value of the measured force.
12

4.2. Parameter Fit and Model Verification
To determine the fit for the parameters proposed in the model in Fig. 5, a displacement inputover a range of frequencies is used to back-drive the device. It should be noted that the terminalsof the motor are left open for this test (i.e., ce = 0). A sine-sweep displacement ranging from 0.2Hz to 2 Hz with a velocity envelope ranging from 4.5 cm/s to 7.5 cm/s was generated over 44seconds and was used for this test. A plot of this displacement input can be seen in Fig. 6. Force,displacement, velocity, and acceleration data was collected using a dSpace DS1103 data acquisitionsystem at a sample rate of 1 kHz. Next, the measured data was used as inputs for the differentialequation that describes the device force f and the Levenberg-Marquardt method was implementedto solve for the optimal parameters in the model. The fit responses using the optimal parametersare compared to measured responses in Fig. 7. Optimal fit values for the parameters as well as theasymptotic standard error percentages for each parameter are listed in Table 2. The parametersassociated with the high-frequency force oscillations attributable to the ballscrew mechanics are fitwith the least level of confidence, whereas parameters associated with the nonlinear belt mechanics
0 5 10 15 20 25 30 35 40−5
−2.5
0
2.5
5
time (s)
dis
pla
cem
en
t (c
m)
Figure 6: Displacement input applied to the device in the sine-sweep test.
0 5 10 15 20 25 30 35 40−300
−200
−100
0
100
200
300
time (s)
forc
e (
N)
−5 −2.5 0 2.5 5−300
−200
−100
0
100
200
300
displacement (cm)
forc
e (
N)
velocity (cm/s)−8 −4 0 4 8
−300
−200
−100
0
100
200
300
forc
e (
N)
experimental
"t
(a)
(b) (c)
Figure 7: Comparison between experimentally measured responses and the model fit to this data: (a) force versustime; (b) force versus displacement; (c) force versus velocity.
13

Parameter Value σp ǫpmd 2.26×10−5 kg 2.64×10−8 kg 0.12 %cd 575 N-s/m 0.339 N-s/m 0.06 %kd 627 N/m 0.425 N/m 0.07 %fc 143.1 N 0.0407 N 0.03 %γ1 6.53 0.245 3.75 %φ1 1.97 0.0383 1.94 %γ2 11.4 0.246 2.15 %φ2 0.974 0.0217 2.23 %kb1 114 N/m 0.252 N/m 0.22 %kb3 1.54×109 N/m3 6.88×105 N/m3 0.04 %cb 1.60×104 N-s/m 5.14 N-s/m 0.03 %
Table 2: Parameter values and asymptotic standard errors for the proposed model.
0 2 4 6 8 10 12 14 16 18−3
−2
−1
0
1
2
3
time (s)
dis
pla
cem
en
t (c
m)
Figure 8: Displacement input applied to the device for the random displacement test.
and and the Coulomb friction force are fit with the greatest level of certainty. The error normsgiven in (40) were calculated to be Et = 0.209, Ex = 0.325, and Ex = 0.919.
To verify the model when the terminals of the motor are left open, the device was excited withan 18 second random displacement. The random displacement is characterized by bandpass filteredwhite noise. The particular filter used to generate the random displacement is a second-order filterwhere we have set the center of passband equal to 0.5 Hz with an acceleration quality factor of 0.5.Fig. 8 illustrates the random displacement used for this test. The plots in Fig. 9 show that themodel and optimal parameters accurately characterizes the behavior of the device. For this test,the error norms given in (40) were determined to be Et = 0.177, Ex = 0.231, and Ex = 0.618.
4.3. Response to a Fluctuating Electromechanical Force
The response of the electromagnetic transducer to all of the previous tests have been for thecase where the terminals of the motor have been left open. However, the performance of an energyharvesting system that utilizes this device will depend on the response of the device with electron-ics controlling the rate power extraction. As such, we must show that our model can accuratelypredict the behavior of the device when the electronics introduce an additional fluctuating elec-tromechanical force. As previously mentioned, one of the simplest ways to harvest power from anelectromagnetic transducer is to have the electronics simulate a resistive load across the terminalsof the transducer. In this case, we have that the additional electromechanical force is the force fromequation (21). Three tests are presented to demonstrate the accuracy of the proposed to model
14

0 2 4 6 8 10 12 14 16 18−300
−200
−100
0
100
200
300
time (s)
forc
e (
N)
−3 −2 −1 0 1 2 3−300
−200
−100
0
100
200
300
displacement (cm)
forc
e (
N)
−9 −6 −3 0 3 6 9−300
−200
−100
0
100
200
300
velocity (cm/s)
forc
e (
N)
experimental
predicted
(a)
(b) (c)
Figure 9: Comparison between predicted and experimentally obtained responses for the random displacement test:(a) force versus time; (b) force versus displacement; (c) force versus velocity.
with a fluctuating electromechanical force, including (1) step response; (2) constant RL, randomdisplacement; and (3) random RL, random displacement.
The step response test consisted of applying a triangular displacement with a constant velocityto the device and with a step change in the load resistance as the device passes through the middleof the stroke. A triangle wave with an amplitude of 5.25 cm at 0.25 Hz was used for this test andcan be seen in Fig. 10. The plots presented in Fig. 11 show the response of the device to thistest. At the beginning of the test, the servo drive is used to simulate the device in open circuitmode. During the mid-way point of the second oscillation, a commanded load resistance of 10 Ωis applied to the servo drive, which results in the device reaching its rated force in 6 ms. This risetime is comparable to a magnetorheological (MR) damper of similar size and force rating [15]. Theerror norms given in (40) were calculated to be Et = 0.132, Ex = 0.234, and Ex = 0.497 for thistest. It should be noted that we observe some amount of overshoot and ringing in the device forceafter the step change in load resistance is applied to the servo drive. The oscillations occurringbefore the force measurement reaches a steady state is a result of the dynamic interaction between
0 1 2 3 4 5 6 7 8 9 10−6
−4
−2
0
2
4
6
time (s)
dis
pla
cem
en
t (c
m)
Figure 10: Displacement input applied to the device for the step response test.
15

0 1 2 3 4 5 6 7 8 9 10−1200
−800
−400
0
400
800
1200
time (s)
forc
e (
N)
−6 −3 0 3 6−1200
−800
−400
0
400
800
1200
displacement (cm)
forc
e (
N)
−8 −4 0 4 8−1200
−800
−400
0
400
800
1200
velocity (cm/s)
forc
e (
N)
experimental
predicted
(a)
(b) (c)
Figure 11: Comparison between predicted and experimentally obtained responses for the step response test: (a) forceversus time; (b) force versus displacement; (c) force versus velocity.
servo drive and the finite coil inductance of the motor. Because internal current tracking of theservo drive is accomplished by proportional control, a step in the load resistance causes a ringingeffect in the force measurement for a brief period of time until the coils become fully magnetized.It would be possible to design a compensator using feedback to reduce these oscillations, but this
0 2 4 6 8 10 12 14 16 18−1200
−800
−400
0
400
800
1200
time (s)
forc
e (
N)
−3 −2 −1 0 1 2 3−1200
−800
−400
0
400
800
1200
displacement (cm)
forc
e (
N)
−9 −6 −3 0 3 6 9−1200
−800
−400
0
400
800
1200
velocity (cm/s)
forc
e (
N)
experimental
predicted
(a)
(b) (c)
Figure 12: Comparison between predicted and experimentally obtained responses for the constant RL, randomdisplacement test: (a) force versus time; (b) force versus displacement; (c) force versus velocity.
16

0 2 4 6 8 10 12 14 16 180
200
400
600
800
time (s)
RL
(Ω
)
Figure 13: Applied RL command to the device in the random displacement, random resistance test.
0 2 4 6 8 10 12 14 16 18−1200
−800
−400
0
400
800
1200
time (s)
forc
e (
N)
−3 −2 −1 0 1 2 3−1200
−800
−400
0
400
800
1200
displacement (cm)
forc
e (
N)
−9 −6 −3 0 3 6 9−1200
−800
−400
0
400
800
1200
velocity (cm/s)
forc
e (
N)
experimental
predicted
(a)
(b) (c)
Figure 14: Comparison between predicted and experimentally obtained responses for the random RL, random dis-placement test: (a) force versus time; (b) force versus displacement; (c) force versus velocity.
is beyond the scope of this paper.In the second test conducted to verify the model, the device was excited with the same random
displacement as in Fig. 8, but the servo drive is used to simulate a constant load resistance acrossthe terminals of the motor. In this case a 16 Ω load resistance was used to ensure that the devicewould not exceed its rated force limit. The response of the device to this test can be seen in Fig.12. As seen here, the model accurately predicts the behavior of the device. For this test, the errornorms given in (40) were calculated to be Et = 0.115, Ex = 0.203, and Ex = 0.378.
For the final verification test, the load resistance simulated by the servo drive was chosen torandomly saturate between two values. The upper bound on the load resistance is 800 Ω and thelower bound on the load resistance is 16 Ω. These values were chosen so that the electromechanicalforce of the device would fluctuate between the force resulting from open circuit mode and the ratedforce. A plot of the random load resistance can be seen in Fig. 13. Again, the random displacementthat is applied to the device is the previous test. The results presented in Fig. 14 confirm thatwe have excellent agreement between the experimental response and the model. For this test, the
17

error norms given in (40) were determined to be Et = 0.138, Ex = 0.237, and Ex = 0.484.The results presented in this section indicate the predictive capability of the model illustrated
in Fig. 5. The results in Fig. 7 illustrates the fit of the model to sine-sweep input data and Figs.8-14 demonstrate that the proposed model successfully predicts the force response to differentmechanical and electrical inputs.
5. Impedance Matching of a TMD
We now present an example in which the electromechanical transducer and servo drive areattached to a TMD within a much larger structure. One of the simplest ways to optimize powerfrom such an application is by resistive impedance matching. We assume that the TMD is excitedat its base by a sinusoidal acceleration with amplitude A0 and frequency w0. First, we developan analytical expression for the average power generated and use this expression to determine theoptimal load resistance that should be imposed by the servo drive to maximize power. Next, wecompare the analytical model to our experimental system. The electromechanical transducer isback-driven by a hydraulic actuator, which simulates the dynamics of TMD using real-time hybrid-testing (RTHT). RTHT is accomplished in dSpace by feeding back force measurements from theelectromechanical transducer in real-time to a simulated disturbance and structure model. Theforce measurement and simulated disturbance force are summed together and used to excite thesimulated structure. The output of the simulated structure is a displacement command signal,which is tracked by the digital controller that is used to operate the hydraulic actuator. Ourexperimental RTHT design follows the procedure in the study by Darby et al. [31] and a blockdiagram describing this procedure can be seen in (15).
The dynamics of the TMD coupled to the electromechanical transducer can be described bythe following second order differential equation
mx(t) + cx(t) + kx(t) + Ff sgn (x(t)) = mA0 sin(ω0t) (41)
where
m = m+md, c = c+ cd + ce, k = k + kd, Ff = fc + γ1 + γ2 . (42)
It should be noted that the approximation of the total Coulomb friction Ff in (41) takes theamplitudes of the bearing friction into account by summing them together with the ballscrewCoulomb friction. This estimate is conservative and it will have an effect on the amount of average
Hydraulic & E/M
Actuators
ADCDAC
SDOF TMD
Model
PID+
–
displacement
command
measured displacement
measured
force
disturbance
force
dSpace DS1103
Figure 15: Hybrid testing block digram
18

power generated as predicted by this model. Next, we derive an expression for the equivalentviscous damping from the Coulomb friction. This can be accomplished through an energy balanceapproach where we set the amount of energy dissipated during one oscillation from the Coulombfriction equal to the amount of energy dissipated by an equivalent viscous damper. This quantitycan be expressed as
ceq =4Ff
πX(43)
where X is the velocity amplitude.The next step is derive an expression for the velocity amplitude of the system in (41) through
harmonic balance. This expression can be written as
X =mA0ω0
√
(−mω20 + k)2 + (c+ ceq)2ω2
0
. (44)
Since ceq depends on X, the expression in (44) is quadratic in X. Substituting the expression forceq in (43) into (44) and solving for X results in
X =
−4cFfω20 +
√
ω20
(
−16F 2f
(
−mω20 + k
)2
+A20m
2π2
(
c2ω20 +
(
−mω20 + k
)2))
π
(
c2ω20 +
(
−mω20 + k
)2) (45)
where we have thrown out the negative root. The TMD is tuned to resonate at the excitation
frequency ω0 =√
k/m, so the expression for the velocity amplitude simplifies to
X =mA0 − 4Ff/π
c. (46)
We can now express the average total power generated during one oscillation as a function of theback-emf of the motor; i.e.,
PT =ω0
2π
∫ 2π
ω0
0
e2qR+RL
dt (47)
where eq =3Ke
2l x(t) is the quadrature back-emf of the motor. Therefore, solving for PT results in
PT =9K2
e X2
8l2(R+RL). (48)
Finally, we have that the average power generated across the load resistance RL is
PL = PTRL
R+RL=
9K2e X
2RL
8l2(R+RL)2. (49)
To determine the resistance that maximizes average power, we take the partial derivative of PL
with respect to RL and set this expression equal to zero. After some manipulation, the optimalresistive load can be written as
R∗
L = R+9K2
e
4l2(c+ cd). (50)
19

0 50 100 1500
1
2
3
4
5
6
RL (Ω)
PL (
W)
Figure 16: Comparison of predicted and experimental average power generated over a range of resistive load values,and for mechanical damping values of 30%, 20%, and 15% (from bottom to top).
Substituting the expression for R∗
L into equation (49) results in an analytical expression for theoptimal power generated; i.e.,
P ∗
L =9K2
e (πmA0 − 4Ff )2
8π2(c+ cd) (9K2e + 4Rl2(c+ cd))
. (51)
It is interesting to note that the amount of Coulomb friction in the device does not influence theoptimal resistive load. However, neglecting the Coulomb friction in the device will significantlyoverestimate the amount of power that can be harvested given any resistive load. In other words,including Coulomb friction effects is crucial to accurately predicting the amount of power that canbe harvested from a TMD by an electromechanical transducer.
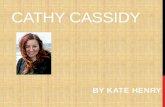
The analytical expression for the average power generated across RL using the experimentallyfit parameters is compared to the RTHT results in Fig. 16 for three levels of mechanical damping
in the TMD. It should be noted that the mechanical damping is defined as (c + cd)/(
2√
mk)
.
In addition, we note that the acceleration amplitude A0 was limited to be 18 cm/s2 so that theresponse of the TMD would be well within the displacement and velocity limits of the hydraulicactuator at 0.5 Hz. We can see from this plot that we have excellent agreement between thepredicted and experimental average power values over the range of load resistances and for thethree levels of mechanical damping. The optimal load resistances given in (50) were calculated tobe 38 Ω, 55 Ω, and 73 Ω while the optimal power generated values given in (51) were calculatedto be 2.62 W, 4.02 W, and 5.42 W for the 30% damping, 20% damping, and 15% damping levels,respectively.
6. Conclusions
This paper illustrates some of the design tradeoffs one faces, in the design of electromechanicaltransducers for use in large-scale vibratory energy harvesting applications. These design tradeoffscan be distilled down to a few criteria that should be used to balance various parameters of themachine, electronics, screw conversion, and structure, against each other. These criteria (or slight
20

variations of them) hold with some generality, for applications of this technology in which theoscillation of the device is concentrated near a single frequency. Secondly, the paper presents amechanical model that accurately predicts the response of the transducer. The model includes anexpression for the high-frequency force oscillations that are attributable to the mechanics of theballscrew as well as a nonlinear spring model to account for the hysteresis in the force-velocityplane. For this device, the nonlinear spring can be attributed to the elasticity of the belt thatconnects the ballscrew to the shaft of the synchronous machine. We show that back-driving thetransducer with a sine-sweep can be used to determine the optimal parameters for the modelthrough a Levenberg-Marquardt nonlinear least squares algorithm. Comparing the model withthe optimal parameters to the experimental response of the device results in excellent agreementfor a wide range of operating conditions, including a step change in load resistance, constant loadresistance with random displacement, and random load resistance with random displacement.
Thirdly this paper demonstrates the energy harvesting capability of the device for the casewhere the transducer is interfaced with a TMD. In order to perform this analysis, we derive ananalytical expression for the average power generated and use this expression to determine theoptimal resistive load and optimal average power generated. Both the analytical model using theexperimentally fit parameters and the experimental system show similar results for the averagepower generated over the range of resistive loads, and for three levels of mechanical damping inthe TMD. Additionally, we are able to accurately predict the optimal load resistances and optimalpower generated values in the experimental system.
ACKNOWLEDGMENTS
Work by the first two authors was supported by NSF award CMMI-0747563. The views ex-pressed in this article are those of the authors, and do not necessarily reflect those of the NationalScience Foundation.
References
[1] J. T. Scruggs and W. D. Iwan, “Control of a civil structure using an electric machine with semiactive capability,”Journal of Structural Engineering, vol. 129, pp. 951–959, 2003.
[2] J. T. Scruggs and W. D. Iwan, “Structural control with regenerative force actuation networks,” Journal ofStructural Control and Health Monitoring, vol. 12, pp. 25–45, 2004.
[3] L. Zuo, B. Scully, J. Shestani, and Y. Zhou, “Design and characterization of an electromagnetic energy harvesterfor vehicle suspensions,” Smart Materials and Structures, vol. 19, pp. 045003, 2010.
[4] C. Nagode, M. Ahmadian, and S. Taheri, “Feasibility study of passive electromagnetic damping systems,” inSPIE International Symposium on Smart Materials and Structures/NDE, San Diego, CA, March 7-11 2010.
[5] P. Glynne-Jones, M. J. Tudor, S. P. Beeby, and N. M. White, “An electromagnetic, vibration-powered generatorfor intelligent sensor systems,” Sensors and Actuators A, vol. 110, pp. 344–349, 2004.
[6] S. Roundy, P. K. Wright, and J. Rabaey, “A study of low level vibrations as a power source for wireless sensornodes,” Journal of Computer Communications, vol. 26, pp. 1131–1144, 2002.
[7] Y. T. Choi and N. M. Wereley, “Self-powered magnetorheological dampers,” Journal of Vibration and Acoustics,vol. 131, pp. 044501, 2009.
[8] S. R. Anton and H. A. Sodano, “A review of power harvesting using piezoelectric materials (2003-2006),” SmartMaterials and Structures, vol. 16, pp. R1–R21, 2007.
[9] S. Priya and D. J. Inman, Eds., Energy Harvesting Technologies, Springer, 2009.[10] P. D. Mitcheson, P. Miao, B. H. Stark, E. M. Yeatman, A. S. Holmes, and T. C. Green, “Mems electrostatic
micro-power generator for low frequency operation,” Sensors Actuators, vol. A115, pp. 523–529, 2004.[11] R. Amirtharajah and A. P. Chandrakasan, “Self-powered signal processing using vibration-based power gener-
ation,” IEEE Journal of Solid-State Circuits, vol. 33, pp. 687–695, 1998.
21

[12] I. L. Cassidy, J. T. Scruggs, and S. Behrens, “Design of electromagnetic energy harvesters for large-scalestructural vibration applications,” in SPIE International Symposium on Smart Materials and Structures/NDE,San Diego, CA, March 6-10 2011.
[13] A. C. Nerves and R. Krishnan, “A strategy for active control of tall civil structures using regenerative electricactuators,” in Proceedings of the Engineering Mechanics Conference, Fort Lauderdale, FL, 1996.
[14] R. Palomera-Arias, J. J. Connor, and J. A. Oschendorf, “Feasibility study of passive electromagnetic dampingsystems,” Journal of Structural Engineering, vol. 134, pp. 164–170, 2008.
[15] B. F. Spencer, S. J. Dyke, M. K. Sain, and J. D. Carlson, “Phenomenological model for magnetorheologicaldampers,” Journal of Engineering Mechanics, vol. 3, pp. 230–238, 1997.
[16] G. Yang, B. F. Spencer, J. D. Carlson, and M. K. Sain, “Large-scale mr fluid dampers: modeling and dynamicperformance considerations,” Engineering Structures, vol. 24, pp. 309–323, 2002.
[17] D. R. Gamota and F. E. Filisko, “Dynamic mechanical studies of electrorheological materials: moderatefrequencies,” Rheology, vol. 35, pp. 399–425, 1991.
[18] G. M. Kamath, M. K. Hurt, and N. M. Werely, “Analysis and testing of bingham plastic behavior in semi-activeelectrorheological fluid dampers,” Smart Materials and Structures, vol. 5, pp. 576–590, 1996.
[19] H. P. Gavin, R. D. Hanson, and F. E. Filisko, “Electrorheological dampers ii: testing and modeling,” Journalof Applied Mechanics, vol. 63, pp. 676–682, 1996.
[20] X. Tang and L. Zuo, “Simulation and experiment validation of simultaneous vibration control and energyharvesting from buildings via tuned mass dampers,” in American Control Conference, San Francisco, CA, June29 - July 1 2011.
[21] T. Ni, L. Zuo, and A. Kareem, “Assessment of energy potential and vibration mitigation of regenerative tunedmass dampers on wind excited tall buildings,” in ASME 2011 International Design Engineering TechnicalConferences & Computers and Information in Engineering Conference, Washington, DC, August 28-31 2011.
[22] N. G. Stephen, “On the maximum power transfer theorem within electromechanical systems,” Proceedings OfThe IME Part C-Journal Of Mechanical Engineering Science, vol. 220, pp. 1261–1267, 2006.
[23] E. Lefeuvre, D. Audigier, C. Richard, and D. Guyomar, “Buck-boost converter for sensorless power optimizationof piezoelectric energy harvester,” IEEE Transactions on Power Electronics, vol. 22, pp. 2018–2025, 2007.
[24] N. Kong, D. S. Ha, A. Erturk, and D. J. Inman, “Resistive impedance matching circuit for piezoelectric energyharvesting,” Journal of Intelligent Material Systems and Structures, vol. 21, pp. 1293–1302, 2010.
[25] J. K. Ward and S. Behrens, “Adaptive learning algorithms for vibration energy harvesting,” Smart Materialsand Structures, vol. 17, no. 3, pp. 035025, 2008.
[26] R. Krishnan, Electric Motor Drives, Prentice Hall, 2001.[27] P. Pillay and R. Krishnan, “Modeling, simulation, and analysis of permanent-magnet motor drives, part 1:
the permanent-magnet synchronous motor drive,” IEEE Transactions on Industry Applications, vol. 25, pp.265–273, 1989.
[28] Y. K. Wen, “Method of random vibration of hysteretic systems,” Journal of Engineering Mechanics, vol. 102,pp. 249–263, 1976.
[29] K. Levenberg, “A method for the solution of certain non-linear problems in least squares,” The Quarterly ofApplied Mathematics, vol. 2, pp. 164–168, 1944.
[30] D. W. Marquardt, “An algorithm for least-squares estimation of nonlinear parameters,” Journal of the Societyfor Industrial and Applied Mathematics, vol. 11, pp. 431–441, 1963.
[31] A. P. Darby, A. Blakeborough, and S. Williams, “Real-time substructure tests using hydraulic actuator,”Journal of Engineering Mechanics, vol. 125, pp. 1133–1139, 1999.
22