Cross Matching EUCLID and SKA using the Likelihood Ratio
18
Cross-matching SKA and EUCLID: The Likelihood Ratio Kim McAlpine Friday 02 August 2013
-
Upload
cosmoaims-bassett -
Category
Technology
-
view
593 -
download
0
description
AIMS Seminar by Dr Kim McAlpine, July 2013
Transcript of Cross Matching EUCLID and SKA using the Likelihood Ratio

Cross-matching SKA and EUCLID:The Likelihood Ratio
Kim McAlpine
Friday 02 August 2013

Euclid complements SKA
Multi-wavelength data provides:
Photo-z’s:
Galaxy properties via SED-fitting:
Classification of AGN/SF
Cosmology Evolution
Galaxy evolution Environments
AGN Evolution AGN/SF connection
Friday 02 August 2013

Cross-matching: A challenge? Low resolution radio data:
large positional offsets
Deeper data:Larger prob of random alignmentsMultiple counterparts
How to identify a ‘True’ counterpart
Friday 02 August 2013

Likelihood RatioIdentifying CounterpartsLikelihood ratio technique
(e.g. Sutherland & Saunders 1992, Smith et al. 2011)
LR=f (r)q(m)
n(m)
Reli=LRi�
j LRj + (1− Q0)
f (r) = 12πσpos
exp( −r2
2σpos)
Radial probability density
- errors in VLA and VIDEO positions
n(m) Probability density of possible counterparts
ie. VIDEO K-band number counts
q(m) Probability density of true counterparts
Likelihood ratio technique(e.g. Sutherland and Saunders 1992, Smith et al. 2011)
LR =f(r)q(m)
n(m)
Friday 02 August 2013

Likelihood RatioIdentifying CounterpartsLikelihood ratio technique
(e.g. Sutherland & Saunders 1992, Smith et al. 2011)
LR=f (r)q(m)
n(m)
Reli=LRi�
j LRj + (1− Q0)
f (r) = 12πσpos
exp( −r2
2σpos)
Radial probability density
- errors in VLA and VIDEO positions
n(m) Probability density of possible counterparts
ie. VIDEO K-band number counts
q(m) Probability density of true counterparts
Likelihood ratio technique(e.g. Sutherland and Saunders 1992, Smith et al. 2011)
LR =f(r)q(m)
n(m)
Friday 02 August 2013

Likelihood RatioIdentifying CounterpartsLikelihood ratio technique
(e.g. Sutherland & Saunders 1992, Smith et al. 2011)
LR=f (r)q(m)
n(m)
Reli=LRi�
j LRj + (1− Q0)
f (r) = 12πσpos
exp( −r2
2σpos)
Radial probability density
- errors in VLA and VIDEO positions
n(m) Probability density of possible counterparts
ie. VIDEO K-band number counts
q(m) Probability density of true counterparts
Likelihood ratio technique(e.g. Sutherland and Saunders 1992, Smith et al. 2011)
LR =f(r)q(m)
n(m)
Probability they are related
Friday 02 August 2013

Likelihood RatioIdentifying CounterpartsLikelihood ratio technique
(e.g. Sutherland & Saunders 1992, Smith et al. 2011)
LR=f (r)q(m)
n(m)
Reli=LRi�
j LRj + (1− Q0)
f (r) = 12πσpos
exp( −r2
2σpos)
Radial probability density
- errors in VLA and VIDEO positions
n(m) Probability density of possible counterparts
ie. VIDEO K-band number counts
q(m) Probability density of true counterparts
Likelihood ratio technique(e.g. Sutherland and Saunders 1992, Smith et al. 2011)
LR =f(r)q(m)
n(m)
Probability they are related
Probability they are unrelated
Friday 02 August 2013

Likelihood RatioIdentifying CounterpartsLikelihood ratio technique
(e.g. Sutherland & Saunders 1992, Smith et al. 2011)
LR=f (r)q(m)
n(m)
Reli=LRi�
j LRj + (1− Q0)
f (r) = 12πσpos
exp( −r2
2σpos)
Radial probability density
- errors in VLA and VIDEO positions
n(m) Probability density of possible counterparts
ie. VIDEO K-band number counts
q(m) Probability density of true counterparts
Likelihood ratio technique(e.g. Sutherland and Saunders 1992, Smith et al. 2011)
LR =f(r)q(m)
n(m)
Positional offset dependence
Friday 02 August 2013

Likelihood RatioIdentifying CounterpartsLikelihood ratio technique
(e.g. Sutherland & Saunders 1992, Smith et al. 2011)
LR=f (r)q(m)
n(m)
Reli=LRi�
j LRj + (1− Q0)
f (r) = 12πσpos
exp( −r2
2σpos)
Radial probability density
- errors in VLA and VIDEO positions
n(m) Probability density of possible counterparts
ie. VIDEO K-band number counts
q(m) Probability density of true counterparts
Likelihood ratio technique(e.g. Sutherland and Saunders 1992, Smith et al. 2011)
LR =f(r)q(m)
n(m)
Magnitude distribution of background
Magnitude distribution of counterparts
Friday 02 August 2013

Positional Accuracy in Radio
Source
Noise
Source + Noise
= +
Friday 02 August 2013

Positional Dependence f(r)3.3. LIKELIHOOD RATIO 50
Figure 3.3: Comparison between the errors in the radio source positions calculated using therelationships in Condon (1997) !Condon and the error estimates used in the LR analysis !Ivisonbased on the relationships in Ivison et al. (2007).
sections.
3.3.1 The radial dependence of the LR
The radial probability distribution, which represents the decreasing probability that a pair of
sources are related as their separation increases, f(r) is given by the Gaussian:
f(r) =1
2"!2pos
exp!!
r2
2!2pos
"(3.4)
where r is the o!set between the radio and infrared position and !pos is the combined positional
error of the radio and infrared sources.
Positional errors of radio sources can be ascribed to two independent sources of error,
calibration errors and noise-like errors (Condon et al., 1998). Calibration errors are independent
of source strength and are best estimated by a comparison with external, more accurate data.
In contrast, the noiselike contribution to positional errors is a function of the signal to noise
ratio of the detection and is thus the dominant contributor to the positional errors of sources
detected at low signal to noise. The noiselike positional errors of radio sources are usually
estimated from the models of Condon (1997) for the propagation of errors in 2-dimensional
Gaussian fits in the presence of Gaussian noise. The models give the noiselike contribution to
σ2pos = σ2
cal +
�0.6
FWHM
SNR
�2
f(r) =1
2πσposexp
−r2
2σpos
Friday 02 August 2013

Magnitude Dependence
n(m) q(m)
Friday 02 August 2013

Magnitude Dependence
3.3. LIKELIHOOD RATIO 54
Figure 3.4: Top: The distribution of real(m) and total(m). Middle: The magnitude dependenceof the of the LR P (m). Bottom: q(m) calculated by the LR in the cross-matching procedure.
Calculate excess sources: Total(m)
Subtract Background: real(m)
Calculate q(m)q(m) =
real(m)�m real(m)
Friday 02 August 2013

Reliability 3.4. RELIABILITY OF COUNTERPARTS 59
Figure 3.6: Likelihood ratios and reliabilities for the VLA-VIDEO cross-matched dataset.Reliability is not linearly related to likelihood ratio and only sources with reliabilities >0.8 areretained as reliable counterparts.
Q0 Fraction of True Counterparts
Multiple id’s
Ncont =�
Rel>0.8
(1− Rel)
Relj =LRj�
i LRi + (1−Q0)
Friday 02 August 2013

Advantage of LR
Smith et al. 2011Identify sources with low reliabilites
Estimate how many missing id’s
Trade-off completeness vs contamination
Friday 02 August 2013

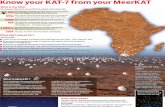
LR: Depth & ResolutionVLA-survey:
100 microJyB-array6” resolution 1 sq degree
VIDEO survey:Z,Y,J,H,Ks photometry limits, 25.,24.6,26.5,24.0,23.5
Positional Accuracy
σ2
pos = σ2
cal +�0.6FWHM
SNR
�2
FWHM σpos
VLA- B 6” 0.72
EMU 10” 1.2
WODAN 15” 1.8
Simulate lower-res EMU/WODAN
Friday 02 August 2013

Cross-Matching at Lower Resolution
3.6. NEAR-INFRARED COUNTERPARTS TO RADIO SOURCES 63
Figure 3.7: The fraction of reliable counterparts detected at 6, 10 and 15 arcsec resolutionwhen matching against the VIDEO NIR catalogue restricted to detections with Ks < 22.6 andKs < 20.0. The greyscale bands represent the 1! Poisson error on the cross-matched fractions.
in !pos result in the expected decrease in the number of secure identifications.
A subsection of the radio data in this chapter has previously been matched to deep
K!band data using a LR procedure (Ciliegi et al., 2005). This matching was performed
over a 165 arcmin2 field observed by Iovino et al. (2005), the limiting magnitude used in the
matching procedure corresponds to the 50% completeness limit of Ks=23.9. Ciliegi et al.
(2005) find a total of 43 reliable K-band matches to the 65 radio sources located within this
subfield, corresponding to a completeness of " 66% which is significantly lower than the 88.7%
completeness achieved in this work. This improvement can be ascribed to the greater depth of
the VIDEO survey, which has factor of "12 greater integration time over the Iovino catalogue
with a telescope of similar aperture. Furthermore the q(m) distributions and LR in Ciliegi
et al. (2005) are derived from the VVDS optical catalogues from McCracken et al. (2003)
available over the whole 1 square degree radio field. As q(mopt) distributions are not precisely
equivalent to q(mNIR) it is likely that their use of the optical magnitude distribution in the
matching procedure contributes to an underestimate of the significance of some of the fainter
NIR matches.
3.6. NEAR-INFRARED COUNTERPARTS TO RADIO SOURCES 64
Figure 3.8: Close-in plot of the fraction of reliable counterparts detected for the faint radiosources (< 1 mJy) at 6,10 and 15 arcsec resolution when matching against the VIDEO NIRcatalogue restricted to detections with Ks < 22.6. The greyscale filled bands represent the 1!variation between the 100 simulated low resolution radio catalogues and do not include thePoisson errors.
3.6.2 Counterparts as a function of near-infrared magnitude
In the case of matching against the VIDEO catalogue limited to the depth of the VHS, table 3.3
reveals a similar increasing trend in the number of contaminating sources with decreasing reso-
lution from 0.8% at 6 arcsec to 1.4 and 2.3% at the lower resolutions. However the completeness
of the cross-matched catalogue is nearly identical at all three resolutions, indicating that the
depth of the complementary near-infrared data is a more relevant limiting factor at these shal-
lower survey depths than radio survey resolution. This trend can be understood by examining
the middle plot in figure 3.4, which indicates that NIR counterparts with magnitudes lower than
Ks < 20.0 are assigned higher q(m)/n(m) fractions than fainter NIR matches. The intrinsic
rarity of brighter NIR sources thus increases the significance of these bright NIR matches allow-
ing us to partially overcome the limitation of poorer positional accuracy. In contrast at deeper
NIR magnitudes the increasing density of faint sources dictates that resolution, or equivalently
positional accuracy, is increasingly relevant in determining the correct counterpart.
Figure 3.9 shows a plot of the fraction of reliably identified counterparts as a function
of Ks band magnitude. This demonstrates that deep near-infrared and/or optical data are
3-5% loss at low res ()
Worst for faint sources
Very few mis-ids:95, 90% same id
Low cont (0.7, 1.4, 2.3%)
Friday 02 August 2013

Cross-matching and magnitudesCross-Matching To Fainter Magnitudes
Most of the Cross-id’s arefaint
Cross-id’s are harder for faintsources.
Most of the Cross-id’s are faint
Cross-id’s are harder for faint sources
Friday 02 August 2013