
Crane control
15
Project Container Crane Control Using Fuzzy Logic
-
Upload
md-hasibur-rashid -
Category
Documents
-
view
27 -
download
1
Transcript of Crane control

Project Container Crane Control Using Fuzzy Logic
Presented By Md. Hasibur Rashid

Container Crane Case Study.
• In crane control, the objective is to position a load over a target point.• While the load connected to the crane head by flexible cables may well sway within certain limits during transportation, the sway must be reduced to almost zero for load release when the target position is reached.• Hence, a controller must use at least two input variables, for example position and sway angle.• Conventional PID control was not successful because the control task is inherently non-linear. For example, sway minimization is important only when the container is close to the target.• Others have tried to derive a mathematical model of the crane to use this in a model-based controller. They came up with a fifth-degree differential equation that describes the mechanical behavior.
Although in theory, controller design based on this model should work, in reality it does not. The reasons for this are:
The weight of the container is unknown. The crane motor behavior is by far not as linear as
assumed in the model, and its gear box involves slack (relaxed parts).
The crane head only moves with friction and its cables involve elasticity.
Disturbances such as wind gusts cannot be included in the model.
Container Crane Case Study.


Control Loop of the Fuzzy Logic Controlled Container Crane:

Container Crane Case Study.• In spite of the difficulties involved with automated control, humanoperators can control cranes quite well in most cases.• The analysis of the operator's actions reveals that the operator uses some "rules of thumb" to describe his control strategy:
Start with medium power. If you get started and you are still far away from target, adjust the motor power so
that the container gets a little behind the crane head. If you are closer to the target, reduce speed so the container gets a little ahead of the
crane head. When the container is very close to the target position, power up the motor. When the container is over the target and the sway is zero, stop the
motor.
No differential equations are required for this, and disturbances and nonlinearities are compensated by the operator's observation of the container's position.

Conventional Fuzzy Control
Fuzzification
Inference
Defuzzfication
Antecedents
Consequent
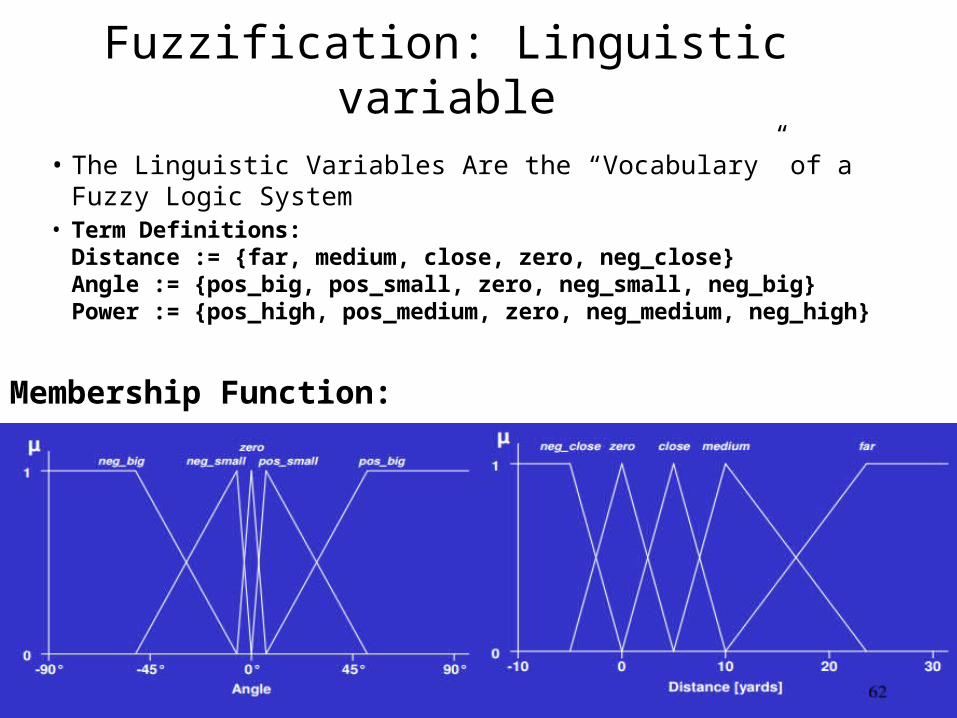
Fuzzification: Linguistic variable• The Linguistic Variables Are the “Vocabulary” of a Fuzzy Logic System • Term Definitions:
Distance := {far, medium, close, zero, neg_close}Angle := {pos_big, pos_small, zero, neg_small, neg_big}Power := {pos_high, pos_medium, zero, neg_medium, neg_high}
Membership Function:
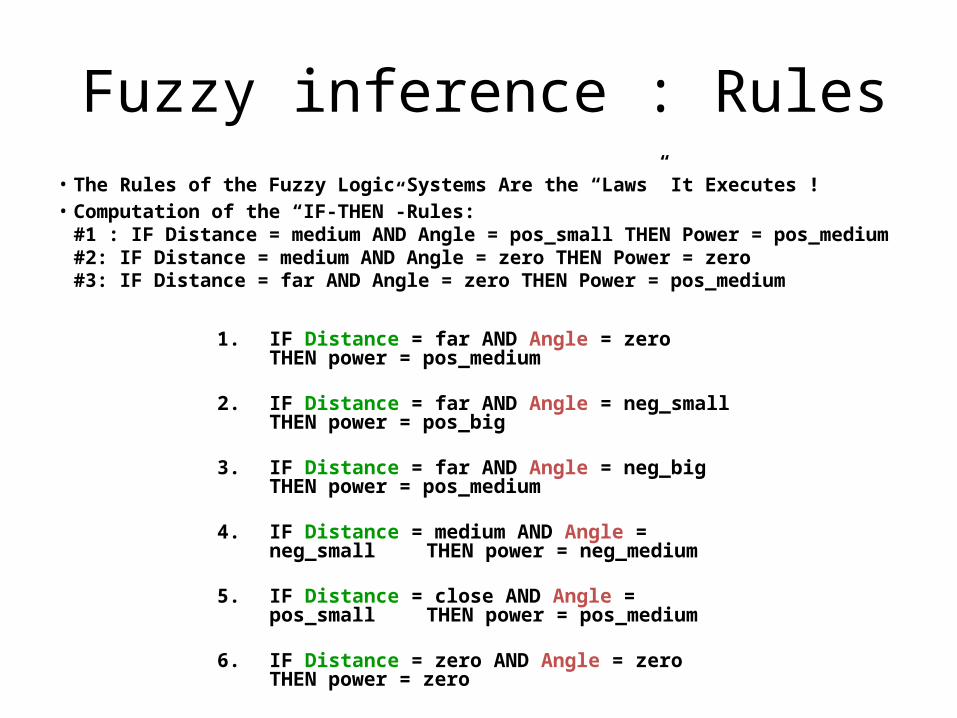
Fuzzy inference : Rules • The Rules of the Fuzzy Logic Systems Are the “Laws” It Executes !• Computation of the “IF-THEN”-Rules:
#1 : IF Distance = medium AND Angle = pos_small THEN Power = pos_medium#2: IF Distance = medium AND Angle = zero THEN Power = zero#3: IF Distance = far AND Angle = zero THEN Power = pos_medium
1. IF Distance = far AND Angle = zero THEN power = pos_medium
2. IF Distance = far AND Angle = neg_small THEN power = pos_big
3. IF Distance = far AND Angle = neg_big THEN power = pos_medium
4. IF Distance = medium AND Angle = neg_small THEN power = neg_medium
5. IF Distance = close AND Angle = pos_small THEN power = pos_medium
6. IF Distance = zero AND Angle = zeroTHEN power = zero
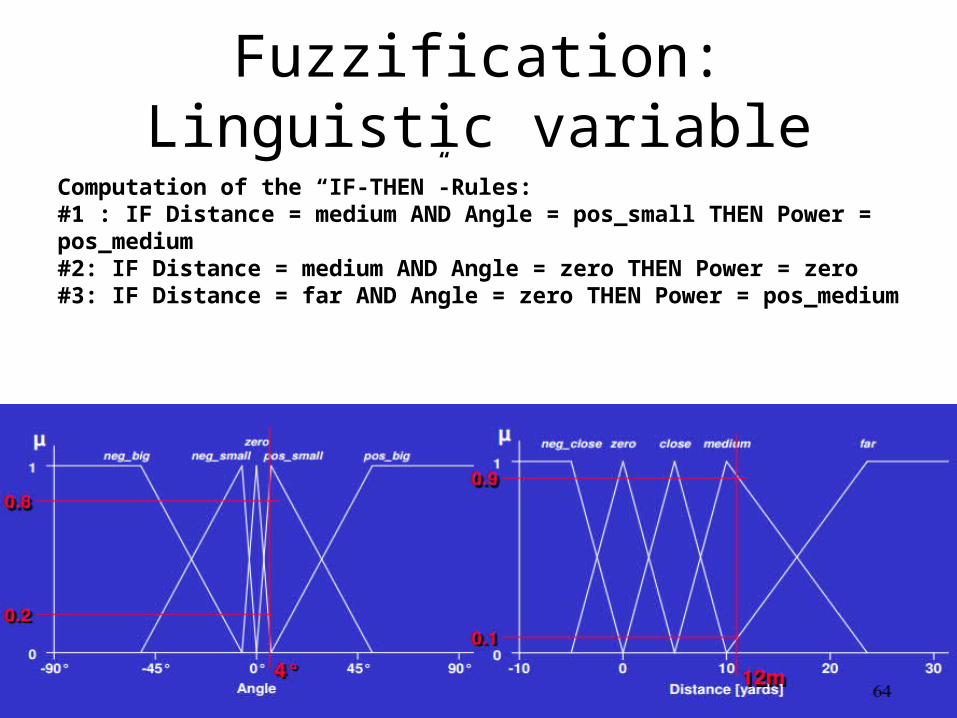
Fuzzification: Linguistic variableComputation of the “IF-THEN”-Rules:#1 : IF Distance = medium AND Angle = pos_small THEN Power = pos_medium#2: IF Distance = medium AND Angle = zero THEN Power = zero#3: IF Distance = far AND Angle = zero THEN Power = pos_medium

Fuzzy--Inference:: -- Aggregation• Aggregation Computes How “Appropriate” Each Rule Is for the Current Situation !
Boolean Logic OnlyDefines Operators for 0/1 :
Fuzzy Logic Delivers a Continuous Extension: AND: µAvB = min{ µA; µB } OR: µA+B = max{ µA; µB } NOT: µ-A = 1 - µA
Aggregation of the “IF”-Part:#1 : min{ 0.9, 0.8 } = 0.8#2: min{ 0.9, 0.2 } = 0.2#3: min{ 0.1 , 0.2 } = 0.1

Next develop the rules use matrix form How many rules maximum?
Distance
Angle
NBN
SZE
PSPB
Too far zero close med far
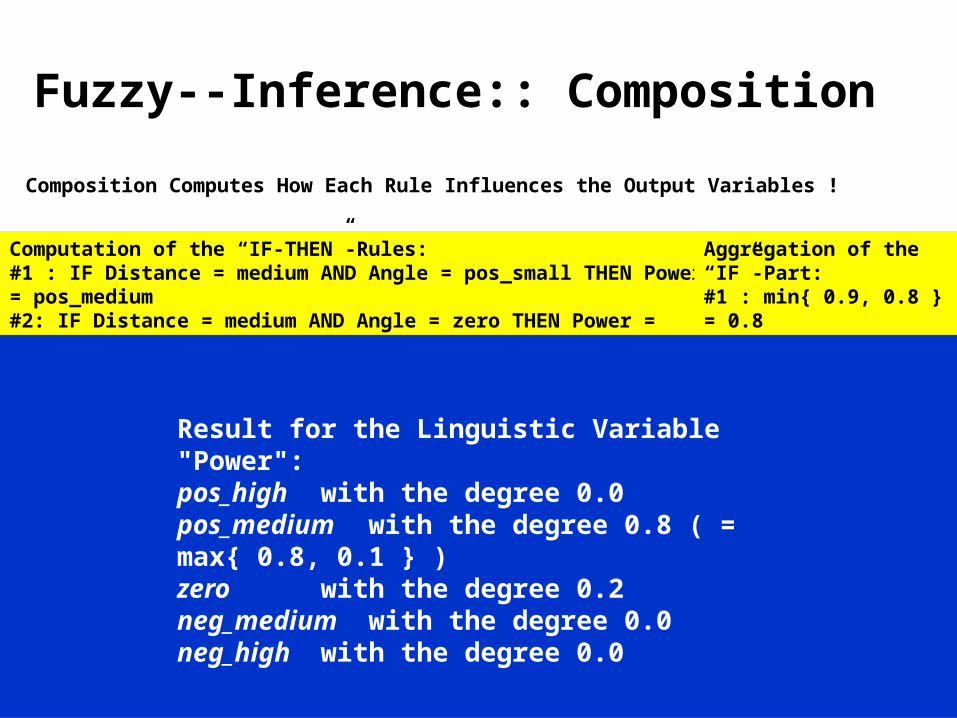
Fuzzy--Inference:: CompositionComposition Computes How Each Rule Influences the Output Variables !
Computation of the “IF-THEN”-Rules:#1 : IF Distance = medium AND Angle = pos_small THEN Power = pos_medium#2: IF Distance = medium AND Angle = zero THEN Power = zero#3: IF Distance = far AND Angle = zero THEN Power = pos_medium
Aggregation of the “IF”-Part:#1 : min{ 0.9, 0.8 } = 0.8#2: min{ 0.9, 0.2 } = 0.2#3: min{ 0.1 , 0.2 } = 0.1
Result for the Linguistic Variable "Power":pos_high with the degree 0.0pos_medium with the degree 0.8 ( = max{ 0.8, 0.1 } )zero with the degree 0.2neg_medium with the degree 0.0neg_high with the degree 0.0

Conclusion
• Fuzzy Logic Enables the use of experience and experimented results to deliver more efficient solutions.
• Fuzzy Logic Extends traditional automated control techniques by adding supervisory control capabilities.
• In container controller case, Fuzzy Logic provides a transparent and simple solution that is much harder to solve using conventional engineering

MD. Hasibur Rashid // MSc. In CSE, KUET, Bangladesh
Thank You


















