
Control of the KAGRA Cryogenic Vibration Isolation System · Control of the KAGRA Cryogenic...
36
Control of the KAGRA Cryogenic Vibration Isolation System Koki Okutomi Sokendai / NAOJ / KAGRA VIS subgroup R. Takahashi, H. Ishizaki, S. Sato, A. Shoda, T. Sekiguchi, Y. Fujii, T. Miyamoto, T. Ushiba, N. Hirata, K. Hayama, T. Akutsu, Y. Aso, R. Flaminio, R. DeSalvo 1 GWADW 2017, Hamilton Island
Transcript of Control of the KAGRA Cryogenic Vibration Isolation System · Control of the KAGRA Cryogenic...

Control of the KAGRA Cryogenic Vibration Isolation System
Koki Okutomi
Sokendai / NAOJ / KAGRA VIS subgroup
R. Takahashi, H. Ishizaki, S. Sato, A. Shoda, T. Sekiguchi, Y. Fujii,
T. Miyamoto, T. Ushiba, N. Hirata, K. Hayama, T. Akutsu, Y. Aso,
R. Flaminio, R. DeSalvo
1GWADW 2017, Hamilton Island

Contents
KAGRA cryogenic suspension: Type-A SAS
Modal damping control of Type-A SAS
Cryogenic and underground issues
2GWADW 2017, Hamilton Island

Seismic Attenuation Systems
in KAGRA
Type-A
Type-B
Type-Bp
3GWADW 2017, Hamilton Island

Type-A SAS
Suspension for arm cavity mirrors
• Tower (room temperature)
• Cryogenic payload
ETMY
ITMY
ETMXITMX
4
13.5 m
GWADW 2017, Hamilton Island

Type-A SASETMY
ITMY
ETMXITMX
5
13.5 m
Suspension for arm cavity mirrors
• Tower (room temperature)
• Cryogenic payloadGWADW 2017, Hamilton Island

Features of Type-A SAS
6
Inverted pendulumlegs
(Ground)
Geometric Anti-Spring
(GAS) filtersPlatform
Mario-nette
MRM
IM
TM RM
IRM
Parallel chain
Cryogenic payload
GWADW 2017, Hamilton Island

Observable DoFs (Tower)
7
Filter 3
Filter 1
Filter 2
BottomFilter
Filter 0 F0 Long., Trans., Yaw
GAS relative Vertical
• F0-F1• F1-F2• F2-F3• F3-BF• BF-PF
BF 6DoFs
• LVDT
• Accelerometer
• LVDT
• (BF) LVDT
Next page ongitudinal ransverse
ertical
itch
oll
aw* From ground
or mass relative
GWADW 2017, Hamilton Island

Observable DoFs (Payload)
8
Platform
Marionette- MRM
IM - IRM
TM - RM
PF Roll, Pitch, Yaw
IM-IRM 6DoFs
• Optical lever
• Optical lever
• Photo-sensor
• Photo-sensor
MN Roll, Pitch, Yaw
MN-MRM 6DoFs
TM Pitch, Yaw • Optical lever
* From ground
or mass relative
GWADW 2017, Hamilton Island

Controllable DoFs
9
Filter 3
Filter 1
Filter 2
BottomFilter
Filter 0 F0 Long., Trans., Yaw
GAS relative Vertical
• F0-F1• F1-F2• F2-F3• F3-BF• BF-PF
BF 6DoFs
Coil-magnet
actuator (all)
Platform
MN - MRM
IM - IRM
TM - RM
IM-IRM 6DoFs
MN-MRM 6DoFs
TM-RM Long., Pitch, Yaw
GWADW 2017, Hamilton Island

BF LVDT
F7 LVDT in Adv. Virgo → re-designed for KAGRA
10GWADW 2017, Hamilton Island

Configuration of BF LVDT
11Vertical x3 Horizontal x3
GWADW 2017, Hamilton Island

Eigenmodes in Type-A0.067Hz 0.067Hz
#6#5#4#3#2#1
#1: Y whole chain 0th
#2: Y whole chain 1st
#3: T whole chain 0th
IP translation
#4: L whole chain 0th
IP translation
#5: Y whole chain 2nd
#6: Y whole chain 3rd
︙ ︙
Totally75 eigenmodes
12GWADW 2017, Hamilton Island

13
Servo
SensorsActuators
Horizontal(Only tower part)
GWADW 2017, Hamilton Island

Open-loop TF (F0 Longitudinal)
14
IP horizontal
0.067 Hz
1st pendulum
0.454 Hz
0th pendulum
0.207 Hz
GWADW 2017, Hamilton Island

Open-loop TF (BF Yaw)
15
Whole chain 0th
Hz Whole chain 2nd
Hz
Whole chain 3nd
Hz
GWADW 2017, Hamilton Island

16
Servo
SensorsActuators
Vertical
GWADW 2017, Hamilton Island

Open-loop TF (GAS F0 Vertical)
17
Whole chain 0th
HzWhole chain 1st
HzWhole chain 2nd
Hz…
GWADW 2017, Hamilton Island

Decay Time (IP + BF + GAS Damping)
18
Requirement (< 60 sec.)
Da
mp
ing
Tim
e[s
ec]
GWADW 2017, Hamilton Island

Next To-do
Sensor blending on IP control
• LVDT displacement sensor + Accelerometer
Seismic re-introduction from BF control
• EQ-stop mechanical eigenmode analysis
• Sensor/Actuator decoupling
Damping strategy in cryogenic payload
19GWADW 2017, Hamilton Island

Cryogenic and Underground Issues
20GWADW 2017, Hamilton Island

Impact of Heat Link
Seismic noise from HL
Heat-link suspension(double pendulum)
21
Platform
Mario-nette
MRM
IM
TM RM
IRM
*Old design!!
GWADW 2017, Hamilton Island

Wire Shrinkage
• Total wire shrinkage
for each chain
~ 1.5 mm
• Relative shift
~ 0.1 mm ✔* Rough estimation
22
Platform
Mario-nette
MRM
IM
TM RM
IRM
Maraging
CuBe
Sapphire
CuBe
CuBe
CuBe
GWADW 2017, Hamilton Island
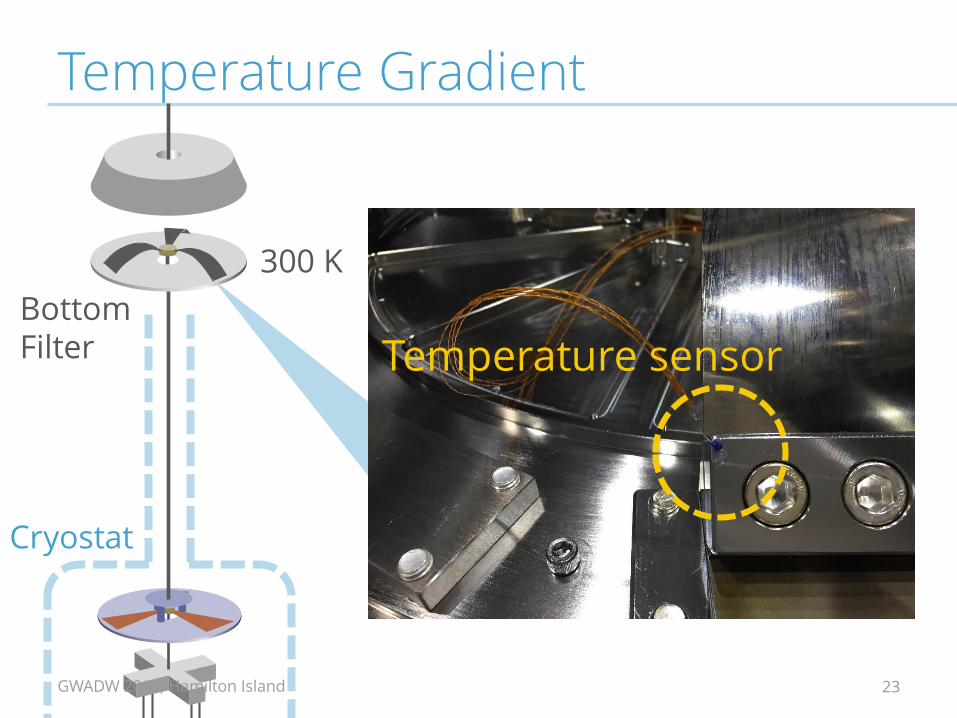
Temperature Gradient
BottomFilter
23
Temperature sensor
Cryostat
300 K
GWADW 2017, Hamilton Island

Seismic in Underground
24A. Shoda, Poster in GWADW 2016GWADW 2017, Hamilton Island
Microseismic @ 0.2 Hz
[1x10-7 ~ 3x10-6 ] m/Hz1/2

Temperature in Underground
GAS thermal drift ➢ Δz / ΔT = 0.69 mm [mm/K]
A. Shoda, Poster in GWADW 2016
PSL
Center
X-end
Y-end
25GWADW 2017, Hamilton Island

Notaccessible
Practical Problem on Installation
26
Release Sensor
(ON/OFF)
JGW-D1605452
Dummy PayloadGWADW 2017, Hamilton Island

How Is Type-A SAS Now?
27
F1 is sitting on the 2nd floor chamber
Klog 2737
GWADW 2017, Hamilton Island

Summary
• KAGRA Cryogenic suspension: Type-A SAS– Under installation
– Damping control design for tower ✔
– Tuning of the control along w/ noise estimation
• Cryogenic and underground issues– Vibration analysis of the heat links
– Treatment of cooling effects on the suspension
– Implementation of underground monitors into
control
28GWADW 2017, Hamilton Island

Backup Slides
29GWADW 2017, Hamilton Island

Stage Configuration
Coordinate difinition
F3
F1
F2
BF
F0
PFMTIMTM
Cryogenic
PayloadMRMIRMRM
ongitudinalransverse
ertical
itch
oll
aw
30
13
.5 m
GWADW 2017, Hamilton Island

Bottom Filter LVDT
Sensor / Actuator
31
Secondary
coils
Primary coil
Bottom Filter(suspended stage)
Low-passMixer
Local
Oscillator
Displacementsignal
• Displacement sensor of
the primary coil
(Ground-side)
GWADW 2017, Hamilton Island

Bottom Filter LVDT
32
Secondary
coils
Magnet
Bottom Filter(suspended stage)
(Ground-side)Coil Driver Actuation signal
Sensor / Actuator
• Coil-magnet actuator
• Driving-frequency
separation
Sensor: 10 kHz (high)
Actuator: < 10 Hz (Low)
GWADW 2017, Hamilton Island

Test Schedule
33
Apr. May Jun. Jul. Aug. Sep. Oct.
Yend
Xend
Installation Test w/ DP
In air,
Room
temp
5/16 – 6/11
Full hanging test & Cooling
w/ sapphire dummy
6/12 – 9/14
VIS Installation Test w/ DP
In vaccum,
Room temp
8/1 – 10/15
GWADW 2017, Hamilton Island

KAGRA EYV Room
34

Vertical Chamber Opened
35

Future update
• System identification test
Real-system modeling
• Implementation of Kalman filter
Estimation of system parameters
• Feedback design optimization with machine learning
LQ regulator + Machine learning → weight optimization
• Feedforward control with underground environmental
monitors
36GWADW 2017, Hamilton Island


















