
Condition Monitoring of Motor-Driven...
15
© 2009 Eaton Corporation. All rights reserved. This is a photographic template – your photograph should fit precisely within this rectangle. Condition Monitoring of Motor-Driven Systems NREL Wind Turbine Condition Monitoring Workshop – 8 October 2009 Mike Nowak D&P Program Manager Eaton – Innovation Center
Transcript of Condition Monitoring of Motor-Driven...

© 2009 Eaton Corporation. All rights reserved.
This is a photographic template – yourphotograph should fit precisely within this rectangle.
Condition Monitoring of Motor-Driven SystemsNREL Wind Turbine Condition Monitoring Workshop – 8 October 2009
Mike NowakD&P Program ManagerEaton – Innovation Center

2 2
Outline
• Overall methodology• Motor diagnostic and prognostic algorithms
• Rotor speed detection • Winding temperature estimation• Shaft misalignment• Broken rotor bar detection• Pump cavitation• Bearing fault detection
• Extensions to wind

3 3
Overall Condition Monitoring Methodology
Only motor voltages and currents are used.
Inferential, nonintrusive, continuous!

4 4
• Rotor Speed Detection (R)• Shaft Misalignment (R, B) • Broken Rotor Bar Detection (R, B)• Pump Cavitation (O)• Winding Temperature Estimate (S) • Bearing Fault Detection (B)• Shaft Torque Estimate (R)• Power Metering (O)• Motor Efficiency (O)• Stator Winding Insulation Faults (S) • Power Quality (O) • Harmonics Analysis Algorithms (O)
Motor CBM Algorithm Summary
Bearing (B) related: 41%
Stator (S) related: 37%
Other (O): 12%
Rotor (R) related: 10%
Motor Fault distribution

5 5
1710
1720
1730
1740
1750
1760
1770
1780
1790
1800
1710 1720 1730 1740 1750 1760 1770 1780 1790 1800
Measured Speed (rpm)
Estim
ated
Spe
ed (r
pm)
Sensorless Rotor Speed Estimation
Estimation error less than 1%.
Motor current spectrum analysis
( ) ⎥⎦
⎤⎢⎣
⎡+
−+= wdseh n
psnkRff2/
11
sehfRotor Slot Harmonics
Slip and rotor speeds rω→ Sensorless, low-cost, and accurate !
1 1.01 1.02 1.03 1.04 1.05 1.06 1.07 1.08 1.09 1.1-20
0
20
Line Currents
A

6 6
Rotor Eccentricity and Misalignment Detection
RM
S o
f C
urre
nt (
mA
)
0 20 40 60 80 100 1200
0.5
1.0
1.5
Detection of Rotor Eccentricity
Detection of Shaft Misalignment
0
0.1
0.2
0.3
0 15sec 30sec 45sec 1deg
all components
w/o important sidebands
important sidebands only
Motor faults can be detected using only stator voltages and currents
Similar Motor Faults:• Air-gap eccentricities• Load torque oscillation• Rotor unbalances• Shaft misalignment• Broken rotor bar
Motor Line Currents
AFAF
MotorControlCenter

7 7
Rotor Fault (Broken Rotor Bar) Detection
• Algorithm is based on advanced wavelets analysis
• Detect developing rotor fault (crack/broken bar, end ring)
Wavelets – time/frequency domain multi-resolution analysis
00.00020.00040.00060.00080.001
0.00120.00140.00160.00180.002
1 2 3 4 5 6 7 8 9 10 11 12
Wavelet level
Faul
t In
dex
Healthy1 broken bar3 broken bar5 broken bar
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
Healthy 1 BrokenBar
2 BrokenBars
3 BrokenBars
4 BrokenBars
Faul
t Ind
ex
100% Load75% Load50% Load
0 0.5 1 1.5 2 2.5 3 3.5 4-100
0
100
D9
7.8125Hz to 3.9063Hz
Time(Sec)
0 0.5 1 1.5 2 2.5 3 3.5 4-100
0
100
D10
3.9063Hz to 1.9531Hz0 0.5 1 1.5 2 2.5 3 3.5 4
-20
0
20
D11
1.9531Hz to 0.97656Hz0 0.5 1 1.5 2 2.5 3 3.5 4
-2
0
2
D12
0.97656Hz to 0.48828Hz0 0.5 1 1.5 2 2.5 3 3.5 4
-1
0
1
D13
0.48828Hz to 0.24414Hz0 0.5 1 1.5 2 2.5 3 3.5 4
-1
0
1
D14
0.24414Hz to 0.12207Hz0 0.5 1 1.5 2 2.5 3 3.5 4
-2
0
2
A14
'0 Hz to 0.12207Hz
Mag
nitu
de
Fs/2
D1D2D3D4
Frequency
S’=S
A4
A1
A3
Fs/4Fs/8Fs/16Fs/32
A2

8 8
Pump Cavitation Detection• Fluid vaporizes when the
pressure becomes to low, forming cavities that violently collapse causing damage to the impeller
• When pump cavitation occurs, the spectral energy of the current in the “lower side-band” (LSB) and “upper side-band” (USB) increase accordingly.
• Detection of cavitation by monitoring average LSB and USB magnitude.
• For example:• LSB: 25-55 Hz• USB: 65-85 Hz
LSB USB
Fig.2: current spectrum w ith cavitation
0 20 40 60 80 100 120 140 160 18010-2
10-1
100
101LSB USB
1.0PU
fbase
f1 f2 f3 f4

9 9
Winding Resistance/Temperature Estimation
DC is injected every 1 minutes for a short period (0.5 sec)
Estimation error less than 3%.
• 37% of motor failures are caused by stator insulation breakdown ⇒ thermal overloading is one of the major causes
• Signal Injection-Based RS (and Temperature) Estimation• Inject signal in the stator → RS estimate and Temperature estimate
→ Sensorless, low-cost, and accurate !
Soft-starter
Drive

10 10
Bearing Fault Detection• Bearing faults account for over 40% of all induction motor faults.• Bearing faults classification
• Single-point defects— Characteristic fault frequencies
• Generalized roughness— More realistic of incipient faults— Difficult to detect for current monitoring
• Bearing Test SetupAccelerate bearing wearingprocess to <100 hours
11 11
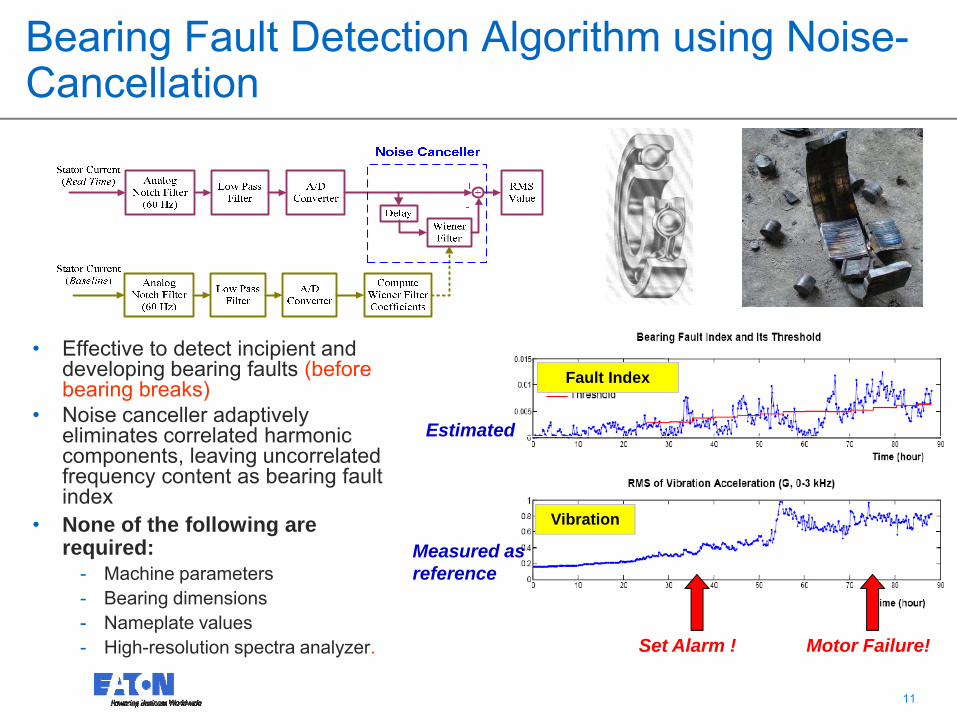
Bearing Fault Detection Algorithm using Noise-Cancellation
• Effective to detect incipient and developing bearing faults (before bearing breaks)
• Noise canceller adaptively eliminates correlated harmonic components, leaving uncorrelated frequency content as bearing fault index
• None of the following are required:
- Machine parameters- Bearing dimensions- Nameplate values- High-resolution spectra analyzer.
Measured as reference
Estimated
Set Alarm ! Motor Failure!
Fault Index
Vibration

12 12
Extensions to Wind• Motor Current Signature Analysis technology may be possible for
induction generator CBM• Low cost complement to sensor-based CBM technologies
(vibration, fluid condition, etc)• Reliable – no sensors to fail!
Nonintrusive, continuous, inferential

13 13
Technical Challenges of Wind Application• What is special about wind turbine CBM?
• Variable speed and variable torque load• Time-varying and unsteady loads (wind gust)• Relative low shaft speed
• Unsteady wind load blurs the diagnostic signatures matured for other applications. Most existing CBM methods cannot be directly applied due to dynamic load.
• Adaptation of motor current spectral analysis (MCSA) techniques towards time-varying or time-frequency representations holds promise
• Scalability – How well do these CBM methods developed for relatively small motors (< 200 HP) scale-up to the large turbine generators?

14 14
Condition Monitoring of Motor-Driven Systems
Mike NowakD&P Program Manager
Eaton - Innovation Center
Questions?

15 15


















