COMPARISON OF INS HEADING AND GPS COG - … · Remote Measurements & Research Company 214 Euclid...
5
Remote Measurements & Research Company 214 Euclid Av. Seattle WA 98122 [email protected] RMR Technical Memo #1227 COMPARISON OF INS HEADING AND GPS COG R. Michael Reynolds November 6, 2012 SUMMARY: In some cases in at-sea measurements there is no available measure of the ship heading. As an expedient, it is tempting to substitute the course over ground, cog, in place of hdg. They are relatively close, especially when the ship is in transit. We have examined measurements of cog and hdg during a trip on the Horizon Spirit, a 260 m container ship from Long Beach to Honolulu and return. A precision inertial navigation system, ins, provided hdg, and a gps system provided the cog. We found that even with this large vessel steaming at 8–12 m s -1 , there was typically a ±5 ◦ difference that correlated well with the winds. We have no measure of ocean currents and these can have an effect. But the strong correlation of the difference to winds suggests that winds are the dominant contributor. On top of the long term wind effect there is considerable short term variation which is caused by the ocean waves, mainly the longer period swell. This wallowing effect inserts a ±2 ◦ signal at a period on the order of 10 sec, the typical swell period. Statement of the problem This document is a brief examination of the differences between the ship heading and its course over ground. The ship speed over ground, sog, and the course over ground, cog, are standard products from any gps unit and are, basically, the velocity vector of the gps antenna without regard to the platform that is carrying it. The heading, hdg, is the direction the platform’s north reference is pointing. On a ship the north reference is the bow—actually it is the bow-stern centerline. On a buoy or other platform the north reference vector must be defined. The (sog,cog) vector and the hdg unit vector are referenced to an earth coordinate system, usually with x to the true east, y to the true north, and z vertially up. Actually many different coordinate systems are used and before using vector mathematics one should be aware of the coordinate system used. Heading is a very important quantity for instrumentation. Without it one does not know where north is. hdg along with (sog,cog) is an essential input to a transformation from apparent to true wind vectors. Yet while a simple instrument (simple today) like gps provides (sog,cog) heading requires a sophisticated inertial navigation system, ins. On a buoy or other platform it might be possible to use a compass corrected by the magnetic variation to true north. But a ship, especially a commercial steel ship, is a large bar magnet and a compass has no hope of working without considerable process of calibration. If one does not have the hdg then the temptation is to use the cog as a substitute for it. When the ship is moving at a reasonable rate, the cog and hdg are very close. They differ when the ship slows down and maneuvers which is often the case for research ships. Setting The magic project is operating on the container ship HORIZON SPIRIT a 260 m, 60000 tone (approx), container ship that carries cargo between Long Beach CA and Honolulu HA. In Feb 2012 a preliminary cruise
-
Upload
trinhkhanh -
Category
Documents
-
view
216 -
download
0
Transcript of COMPARISON OF INS HEADING AND GPS COG - … · Remote Measurements & Research Company 214 Euclid...

Remote Measurements & Research Company214 Euclid Av.Seattle WA [email protected]
RMR Technical Memo #1227
COMPARISON OF INS HEADING AND GPS COG
R. Michael Reynolds
November 6, 2012
SUMMARY: In some cases in at-sea measurements there is no available measure of the ship heading. As anexpedient, it is tempting to substitute the course over ground, cog, in place of hdg. They are relatively close,especially when the ship is in transit. We have examined measurements of cog and hdg during a trip on theHorizon Spirit, a 260 m container ship from Long Beach to Honolulu and return. A precision inertial navigationsystem, ins, provided hdg, and a gps system provided the cog. We found that even with this large vesselsteaming at 8–12 m s−1, there was typically a ±5◦ difference that correlated well with the winds. We have nomeasure of ocean currents and these can have an effect. But the strong correlation of the difference to windssuggests that winds are the dominant contributor. On top of the long term wind effect there is considerableshort term variation which is caused by the ocean waves, mainly the longer period swell. This wallowing effectinserts a ±2◦ signal at a period on the order of 10 sec, the typical swell period.
Statement of the problemThis document is a brief examination of the differences between the ship heading and its course over ground.The ship speed over ground, sog, and the course over ground, cog, are standard products from any gps unitand are, basically, the velocity vector of the gps antenna without regard to the platform that is carrying it. Theheading, hdg, is the direction the platform’s north reference is pointing. On a ship the north reference is thebow—actually it is the bow-stern centerline. On a buoy or other platform the north reference vector must bedefined. The (sog,cog) vector and the hdg unit vector are referenced to an earth coordinate system, usuallywith x to the true east, y to the true north, and z vertially up. Actually many different coordinate systems areused and before using vector mathematics one should be aware of the coordinate system used.
Heading is a very important quantity for instrumentation. Without it one does not know where north is.hdg along with (sog,cog) is an essential input to a transformation from apparent to true wind vectors. Yetwhile a simple instrument (simple today) like gps provides (sog,cog) heading requires a sophisticated inertialnavigation system, ins. On a buoy or other platform it might be possible to use a compass corrected by themagnetic variation to true north. But a ship, especially a commercial steel ship, is a large bar magnet and acompass has no hope of working without considerable process of calibration.
If one does not have the hdg then the temptation is to use the cog as a substitute for it. When the shipis moving at a reasonable rate, the cog and hdg are very close. They differ when the ship slows down andmaneuvers which is often the case for research ships.
SettingThe magic project is operating on the container ship HORIZON SPIRIT a 260 m, 60000 tone (approx),container ship that carries cargo between Long Beach CA and Honolulu HA. In Feb 2012 a preliminary cruise

Magic04 Data Review 2
160oW 150oW 140oW 130oW 120oW 110oW
20oN
24oN
28oN
32oN
36oN
40oN
STARTo043
o046
o049
o052
END
CRUISE , FROM 2012−02−11 (042) 23:40:00.0 TO 2012−02−23 (054) 14:14:00.0
4
8
12
16
20
Figure 1: Data from magic00, the preliminary cruise in Feb 2012, is used for this comparison. Trackline for magic00colored according to apparent wind speed. For this graphic, because the ship’s east and west tracks were exactly thesame, the return track is displaced slightly northward.
(magic00) was taken in order to become familiar with the working of the ship in anticipation of full deploymentin Oct 2012. Some typical instrumentation was deployed during the cruise and is described in a technical memom1104. Results from magic00 are described in the tm1202 Magic00 Cruise Report.
Instrumentation and MethodsInstrumentation included a Kearfott SeaNav ring laser inertial gyro that provided every possible motion at a50 Hz rate. The SeaNav data was subsampled to 10 Hz and to 1 Hz and these data were stored for analysis.We had several gps units operating and recorded the data each 5 sec. To compare to the hdg, the 5-sec datawas interpolated down to a 1-Hz time base. These time series are called the “raw’ data set. The 1 Hz hdgdata were unit vectored averaged over a 2-minute averaging time. The 5-sec gps data were averaged over thesame times. The 2-min data set is called the “avg’ data set.
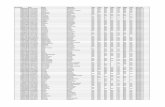
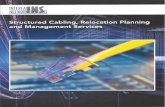
Errors in true wind calculationsThe heading is used in the computation of true wind speed and direction. True winds require the apparentwind vector, hdg, and the ship’s (sog,cog) vector. We computed true winds for the entire cruise by first usingthe hdg, also called yaw by the ins manufacturer, then using cog in place of hdg. The results are shown infigs 5 and 6.
The substitution makes a negligible error in the computed true wind speed; only a few tenths of a m s−1.However the error in direction shown by fig 3 appears in the true wind direction error.
A major use of the meteorological measurements is to calculate the air-sea energy flux using bulk transfercoefficient algorithms. In these calculations accuracy in the true wind speed calculations is crucial. The resultshere show that while the true wind directions can be in error by many degrees, the computed true wind speedis only slightly effected. And the speed is the most important contributor.

Magic04 Data Review 3
44 46 48 50 52 54
2
4
6
8
102012−02−11 (042) 23:40 to 2012−02−23 (054) 14:14now = 2012−11−05, 11:17
SPEED OVER GROUND
YEAR DAY
SPEE
D −
M/S
44 46 48 50 52 540
50
100
150
200
250
300
350 2012−02−11 (042) 23:40 to 2012−02−23 (054) 14:14now = 2012−11−05, 11:14
COG (blue), HDG (red)
YEAR DAY
DEG
REE
S
Figure 2: isar trackline of ssst for Leg 00.
The sog and cog for the cruise magic00. The top panelshows that the ship maintains a steady 11± 1 m s−1 speedgoing to Hawaii and 8 ± 1 m s−1 on the return to LongBeach. The bottom panel shows the gps cog in blue andthe actual hdg in red.
Notice during the Honolulu-Long Beach transit, hdg wasgreater than cog for days the first half and less than cogfor the days 48.5–51 approx, and greater than cog for theremainder, days 51–55. The data in the cruise report showsthat leg had strong starboard winds followed by port windsand to maintain the desired course the ship had to steerinto the winds.

Magic04 Data Review 4
44 46 48 50 52 54−8
−6
−4
−2
0
2
4
6
8 2012−02−11 (042) 23:40 to 2012−02−23 (054) 13:36now = 2012−11−05, 09:53
COG−HDG DIFFERENCE, 2-MIN AVG
YEAR DAY
DEG
REE
S
Figure 3: The cog–hdg behavior described in fig 2 is clearly defined in this plot of their angular difference. A differenceof -4◦ to +5◦ is a significant error.
−15 −10 −5 0 5 10 150
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
COG−HDG DIFF
FREQ
UEN
CY
COG−HDG HISTOGRAM
Figure 4: A histogram of the angle differences shows that during the cruise examined here the difference is unbiasedand has a spread on the order of ±10◦.
Magic04 Data Review 5
Figure 5: Comparison of computed true wind speed if hdg is used and if cog is substituted for the heading.
Figure 6: The comparison of computed true wind direction is cog is substituted for hdg.