Closed-form displacement analysis for a nine-link Barranov truss or a eight-link Assur group
12
Closed-form displacement analysis for a nine-link Barranov truss or a eight-link Assur group p Lin Han, Qizheng Liao*, Chonggao Liang Department of Mechanical and Electronic Engineering, Beijing University of Posts and Telecommunications, 100876, Beijing, People’s Republic of China Received 20 March 1998; accepted 10 February 1999 Abstract The closed-form displacement analysis of one kind of nine-link Barranov trusses which are interrelated to eight kinds of eight-link Assur groups is solved when a rigid quadrangular link is fixed. It is also equivalent to displacement analysis of one kind of eight-link Assur groups. The method used here is vector with complex numbers. Several vector equations are established according to dierent loops. Then the equations are changed into the form of complex numbers. By algebraic elimination, the problem is reduced to a single unknown equation which is proved to be 48th degree. It shows that this structure of Barranov truss has 48 possible assembly configurations. Moreover, all the Assur groups which interrelate to this nine-link Barranov truss will have the same number of solutions. # 1999 Elsevier Science Ltd. All rights reserved. 1. Introduction In the structure analysis and synthesis of planar mechanisms, Assur group is usually used as an independent unit of a basic chain. When the outside pairs of the Assur group are connected with the known moving links or frame, the movement of every link of the Assur group is determined. Thus, if we can do the analysis for a certain kind of Assur groups, we can analyze all the linkages constructed by this kind of Assur groups. The kinematics analysis of a mechanism begins with the displacement analysis. The Mechanism and Machine Theory 35 (2000) 379–390 0094-114X/00/$ - see front matter # 1999 Elsevier Science Ltd. All rights reserved. PII: S0094-114X(99)00016-6 www.elsevier.com/locate/mechmt p Work supported by China National Natural Science Foundation and China National Climbing Project. * Corresponding author. E-mail address: [email protected] (Q. Liao)
Transcript of Closed-form displacement analysis for a nine-link Barranov truss or a eight-link Assur group

Closed-form displacement analysis for a nine-link Barranovtruss or a eight-link Assur group
p
Lin Han, Qizheng Liao*, Chonggao Liang
Department of Mechanical and Electronic Engineering, Beijing University of Posts and Telecommunications, 100876,Beijing, People's Republic of China
Received 20 March 1998; accepted 10 February 1999
Abstract
The closed-form displacement analysis of one kind of nine-link Barranov trusses which areinterrelated to eight kinds of eight-link Assur groups is solved when a rigid quadrangular link is ®xed. Itis also equivalent to displacement analysis of one kind of eight-link Assur groups. The method used hereis vector with complex numbers. Several vector equations are established according to di�erent loops.Then the equations are changed into the form of complex numbers. By algebraic elimination, theproblem is reduced to a single unknown equation which is proved to be 48th degree. It shows that thisstructure of Barranov truss has 48 possible assembly con®gurations. Moreover, all the Assur groupswhich interrelate to this nine-link Barranov truss will have the same number of solutions. # 1999Elsevier Science Ltd. All rights reserved.
1. Introduction
In the structure analysis and synthesis of planar mechanisms, Assur group is usually used asan independent unit of a basic chain. When the outside pairs of the Assur group are connectedwith the known moving links or frame, the movement of every link of the Assur group isdetermined. Thus, if we can do the analysis for a certain kind of Assur groups, we can analyzeall the linkages constructed by this kind of Assur groups.The kinematics analysis of a mechanism begins with the displacement analysis. The
Mechanism and Machine Theory 35 (2000) 379±390
0094-114X/00/$ - see front matter # 1999 Elsevier Science Ltd. All rights reserved.PII: S0094-114X(99)00016-6
www.elsevier.com/locate/mechmt
pWork supported by China National Natural Science Foundation and China National Climbing Project.
* Corresponding author.E-mail address: [email protected] (Q. Liao)
displacement analysis for an Assur group is to ®nd out the relative positions of the inside pairswhen all the dimensions of the links and positions of outside pairs are known. This is adi�cult task, because we must deal with the multivariable polynomial equations. When thekinematics analysis of mechanism is ®nished, the velocity and acceleration analyses arerelatively simpler than displacement analysis, because they involve only equations which arelinear in the unknowns.The Barranov truss has a close relationships with the Assur groups, but sometimes it is
ignored by the researchers. Barranov truss is a rigid structure which is formed when a linkconnects to all the outside pairs of an Assur group. On the other hand, removing any link of aBarranov truss, an Assur group will be obtained. By removing di�erent link from a Barranovtruss, di�erent Assur group can be gained. So several Assur groups can be obtained by oneBarranov truss.Like Assur group, the displacement (position) analysis for a Barranov truss is to ®nd out the
displacement of pairs when all the dimensions of the links are known. When we do it, we mustchoose one link in the Barranov truss and ®x it ®rstly. The following work is the same asdisplacement analysis for a Assur group, because ®xed link for Barranov truss is equivalent tothe knowing outside pairs for a Assur group. The number of assembly con®gurations forBarranov truss will be the same no matter which link is ®xed. It is to say that all the Assurgroups interrelated to one Barranov truss will have the same number of assemblycon®gurations.The early research for Assur groups in closed-form (analytical) solutions was presented by
Liand [1], where planar Assur II groups were solved and six solutions are obtained.Subsequently, the same problem was studied in Ref. [2±4, 7±9]. Recently, one kind of sevsen-link Barranov truss or six-link Assur groups was solved by Innocenti [5]. However, all theother Assur groups which are more than six-link remain unsolved.In this paper, the displacement analysis for one kind of nine-link Barranov trusses is studied
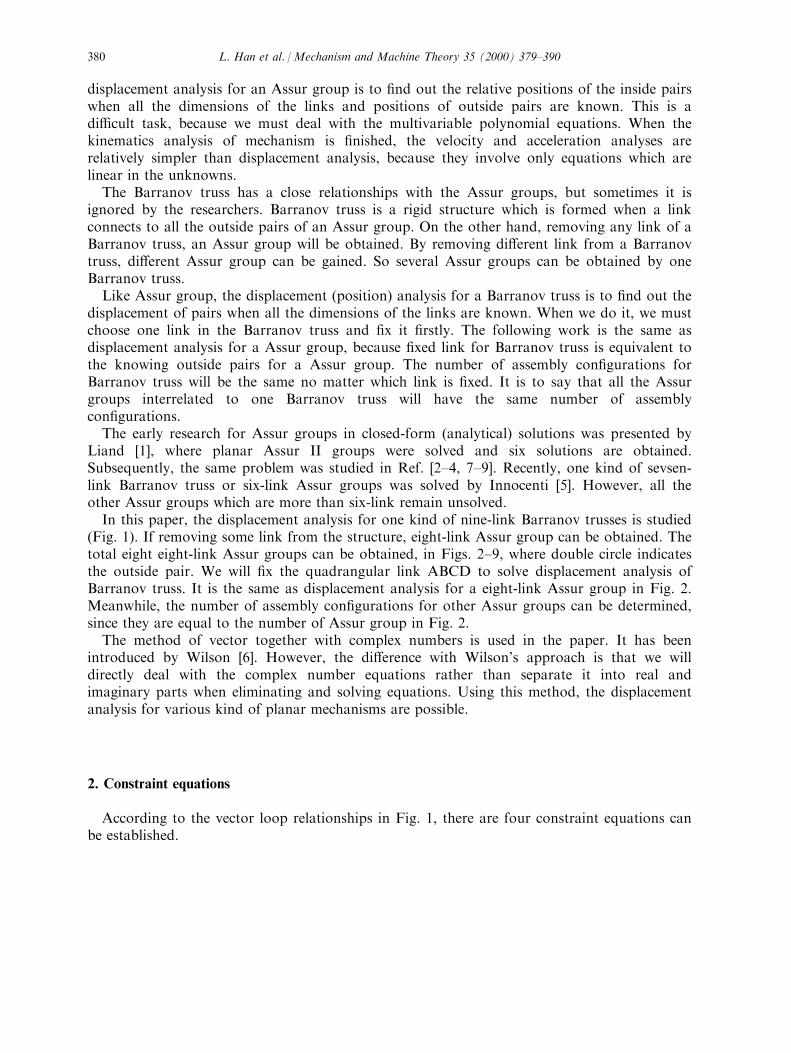
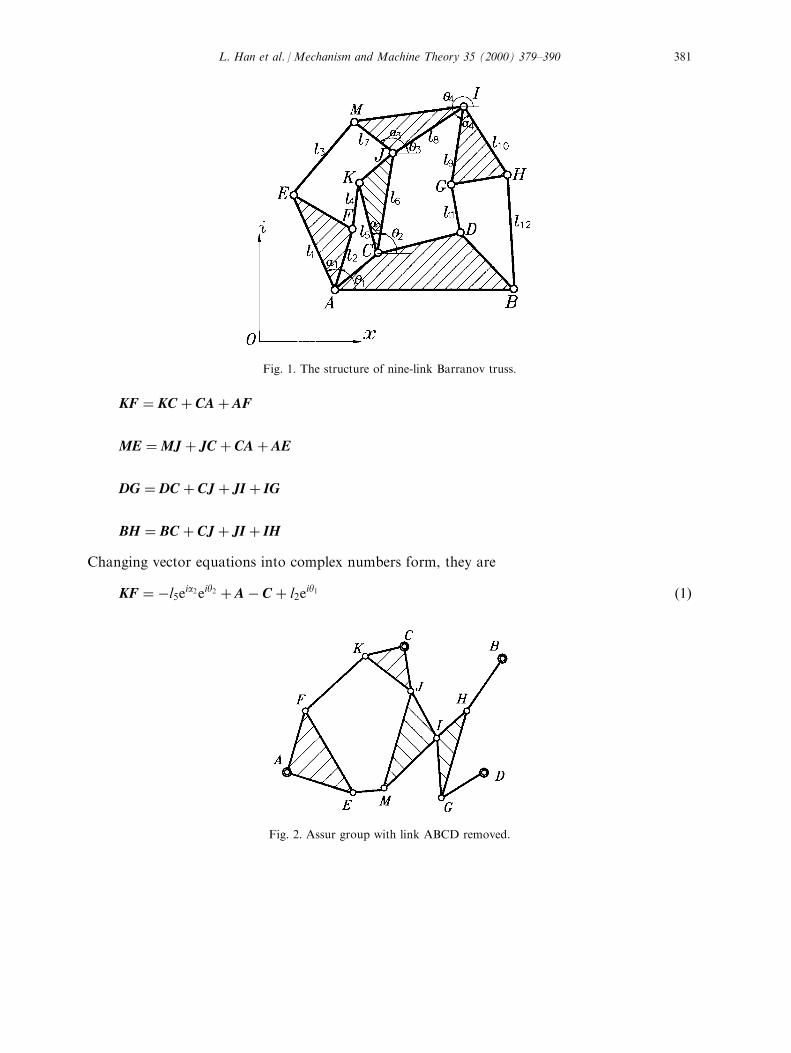
(Fig. 1). If removing some link from the structure, eight-link Assur group can be obtained. Thetotal eight eight-link Assur groups can be obtained, in Figs. 2±9, where double circle indicatesthe outside pair. We will ®x the quadrangular link ABCD to solve displacement analysis ofBarranov truss. It is the same as displacement analysis for a eight-link Assur group in Fig. 2.Meanwhile, the number of assembly con®gurations for other Assur groups can be determined,since they are equal to the number of Assur group in Fig. 2.The method of vector together with complex numbers is used in the paper. It has been
introduced by Wilson [6]. However, the di�erence with Wilson's approach is that we willdirectly deal with the complex number equations rather than separate it into real andimaginary parts when eliminating and solving equations. Using this method, the displacementanalysis for various kind of planar mechanisms are possible.
2. Constraint equations
According to the vector loop relationships in Fig. 1, there are four constraint equations canbe established.
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390380
KF � KC � CA� AF
ME � MJ � JC � CA� AE
DG � DC � CJ � JI � IG
BH � BC � CJ � JI � IH
Changing vector equations into complex numbers form, they are
KF � ÿl5eia2eiy2 � Aÿ C � l2eiy1 �1�
Fig. 2. Assur group with link ABCD removed.
Fig. 1. The structure of nine-link Barranov truss.
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390 381
Fig. 4. Assur group with link FK removed.
Fig. 3. Assur group with link AEF removed.
Fig. 5. Assur group with link ME removed.
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390382

ME � ÿl7eia3eiy3 ÿ l6eiy2 � Aÿ C � l1e
ia1eiy1 �2�
DG � C ÿ D� l6eiy2 � l8e
iy3 � l9eiy4 �3�
BH � C ÿ B� l6eiy2 � l8e
iy3 � l10eia4eiy4 �4�
Here, A,B,C and D denote the coordinates of points A, B, C and D under the complexcoordinate which have the form of x� yi, i � �������ÿ1p
. Since the square of distance between thepoints K and F is equal to KF multiplied by its conjugate complex numbers KF (in this paper,the upper line stands for conjugate complex numbers), the following equation from Eq. (1) isgained.
Fig. 6. Assur group with link BH removed.
Fig. 7. Assur group with link CKJ removed.
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390 383

l24 �ÿÿ l5e
ia2eiy2 � Aÿ C � l2eiy1�ÿÿ l5e
ÿia2eÿiy2 � Aÿ C � l2eÿiy1
�Similarly, there are three other equations from Eqs. (2)±(4).
l23 �ÿÿ l7e
ia3eiy3 ÿ l6eiy2 � Aÿ C � l1e
ia1eiy1�ÿÿ l7e
ÿia3eÿiy3 ÿ l6eÿiy2 � Aÿ C � l1e
ÿia1eÿiy1�
l211 �ÿC ÿ D� l6e
iy2 � l8eiy3 � l9e
iy4�ÿ
C ÿ D� l6eÿiy2 � l8e
ÿiy3 � l9eÿiy4
�l212 �
ÿC ÿ B� l6e
iy2 � l8eiy3 � l10e
ia4eiy4�ÿ
C ÿ B� l6eÿiy2 � l8e
ÿiy3 � l10eÿia4eÿiy4
�Substituting above equations by t1 � eiy1 , t2 � eiy2 , t3 � eiy3 , t4 � eiy4 and expanding them, wehave polynomial equations
Fig. 8. Assur group with link JMI removed.
Fig. 9. Assur group with link IGH removed.
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390384

f�t1,t2� � C106t1 � C105t1tÿ12 � C104t2 � C103 � C102t
ÿ12 � C101t
ÿ11 t2 � C100t
ÿ11 � 0 �5�
f�t1,t2,t3� � C212t1 � C211t1tÿ13 � C210t1t
ÿ12 � C209t2 � C208t2t
ÿ13 � C207t3 � C206
� C205tÿ13 � C204t
ÿ12 t3 � C203t
ÿ12 � C202t
ÿ11 t2 � C201t
ÿ11 t3 � C200t
ÿ11
� 0 �6�
f�t2,t3,t4� � C312t2 � C311t2tÿ14 � C310t2t
ÿ13 � C309t3 � C308t3t
ÿ14 � C307t4 � C306
� C305tÿ14 � C304t
ÿ13 t4 � C303t
ÿ13 � C302t
ÿ12 t3 � C301t
ÿ12 t4 � C300t
ÿ12
� 0 �7�
f�t2,t3,t4� � C412t2 � C411t2tÿ14 � C410t2t
ÿ13 � C409t3 � C408t3t
ÿ14 � C407t4 � C406
� C405tÿ14 � C404t
ÿ13 t4 � C403t
ÿ13 � C402t
ÿ12 t3 � C401t
ÿ12 t4 � C400t
ÿ12
� 0 �8�
where all the coe�cients are the function of the known structural parameters.
3. Eliminating equations
The whole eliminating process can be divided into two steps. First, we eliminate t1 from Eqs.(5) and (6) then get a new equation which only contains variables t2 and t3. Meanwhile, weeliminate t4 from Eqs. (7) and (8) and also get a new equation which only contains variables t2and t3. Then, we eliminate t3 from the two new equations. Finally, one single equation which isthe function of t2 or t
ÿ12 will be obtained.
Multiplying Eqs. (5) and (6) by t1, we rewrite them as follows
B12t21 � B11t1 � B10 � 0 �9�
B22t21 � B21t1 � B20 � 0 �10�
where Bij (i = 1, 2; j = 0, 1, 2) are the function of the known structural parameters togetherwith variables t2 or t2, t3.Multiplying Eqs. (9) and (10) by t1, we get
B12t31 � B11t
21 � B10t1 � 0 �11�
B22t31 � B21t
21 � B20t1 � 0 �12�
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390 385

For Eqs. (9)±(12), the variable t1 can be eliminated by the resultant of Eq. (13). If consideringt31,t
21,t1,1 as a linear homogeneous unknown variables, the condition of Eqs. (9)±(12) having
non-trivial solutions is that the determinant of the coe�cient matrix must be equal to zero,that is,��������
B12 B11 B10 0B22 B21 B20 00 B12 B11 B10
0 B22 B21 B20
�������� � 0 �13�
It is obviously that Eq. (13) only contains variables t2 and t3. Expanding Eq. (13) by usingcomputer symbolical calculation, then multiplying it by t23, we have
K14t43 � K13t
33 � K12t
23 � K11t3 � K10 � 0 �14�
The coe�cients K1i (i = 0±4) are the function of the known structural parameters and singlevariable t2 or t
ÿ12 .
Moreover, multiplying Eqs. (7) and (8) by t4, we get
B32t24 � B31t4 � B30 � 0 �15�
B42t24 � B41t4 � B40 � 0 �16�
Eliminating t4 by using a similar resultant and rearranging it, we have
K26t63 � K25t
53 � K24t
43 � K23t
33 � K22t
23 � K21t3 � K20 � 0 �17�
The coe�cients K2j ( j = 0±6) are the function of the known structural parameters and singlevariable t2 or t
ÿ12 .
Multiplying Eq. (14) by t3,t23,t
33,t
43,t
53 and multiplying Eq. (17) by t3,t
23,t
33 respectively, it yields
eight additional equations. The eight equations, together with the two original Eqs. (14) and(17), a total ten equations are thus obtained. They can be written in the matrix form as follows
�Q� � �T� � 0 �18�where [T ] is a column matrix in which each element is considered as a linear homogeneousvariable,
�T� � �t93,t83,t73,t63,t53,t43,t33,t23,t3,1�TFor the equation set (18) to have non-trivial solutions, the determinant of the coe�cient matrix[Q ] must vanish, that is,
det�Q� � 0 �19�and [Q ] is a 10� 10 matrix which only contains the variable t2 or tÿ12 and the knownstructural parameters.
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390386
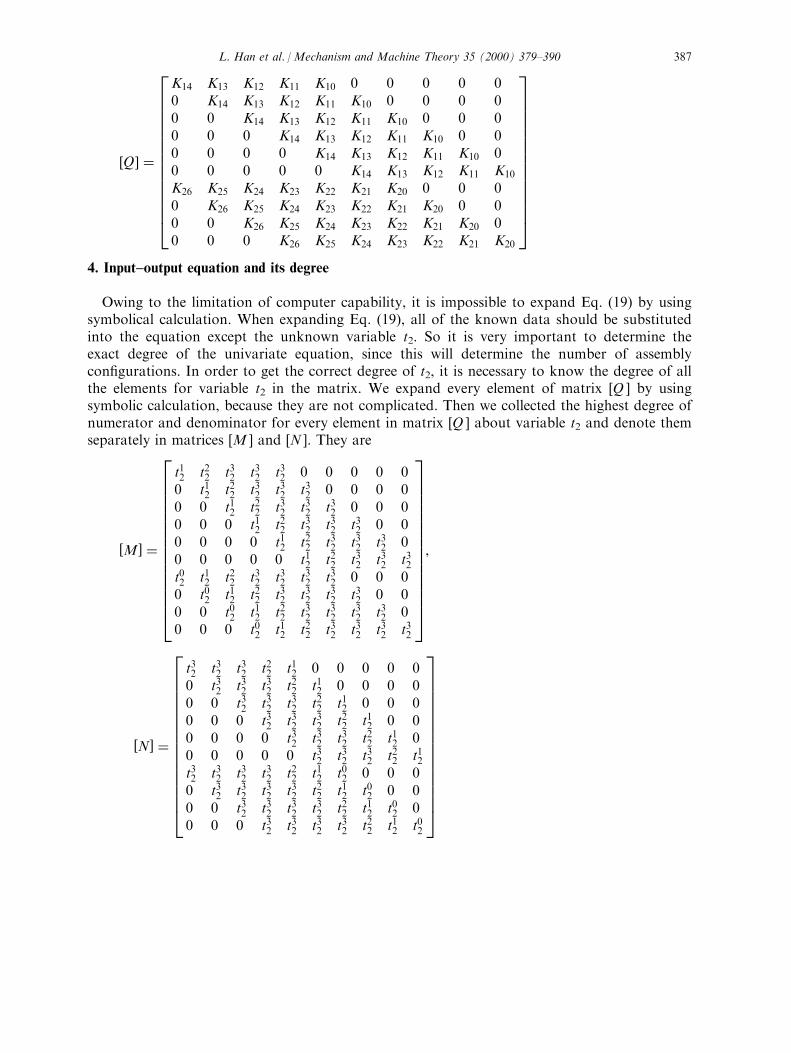
�Q� �
2666666666666664
K14 K13 K12 K11 K10 0 0 0 0 00 K14 K13 K12 K11 K10 0 0 0 00 0 K14 K13 K12 K11 K10 0 0 00 0 0 K14 K13 K12 K11 K10 0 00 0 0 0 K14 K13 K12 K11 K10 00 0 0 0 0 K14 K13 K12 K11 K10
K26 K25 K24 K23 K22 K21 K20 0 0 00 K26 K25 K24 K23 K22 K21 K20 0 00 0 K26 K25 K24 K23 K22 K21 K20 00 0 0 K26 K25 K24 K23 K22 K21 K20
37777777777777754. Input±output equation and its degree
Owing to the limitation of computer capability, it is impossible to expand Eq. (19) by usingsymbolical calculation. When expanding Eq. (19), all of the known data should be substitutedinto the equation except the unknown variable t2. So it is very important to determine theexact degree of the univariate equation, since this will determine the number of assemblycon®gurations. In order to get the correct degree of t2, it is necessary to know the degree of allthe elements for variable t2 in the matrix. We expand every element of matrix [Q ] by usingsymbolic calculation, because they are not complicated. Then we collected the highest degree ofnumerator and denominator for every element in matrix [Q ] about variable t2 and denote themseparately in matrices [M ] and [N ]. They are
�M� �
26666666666666664
t12 t22 t32 t32 t32 0 0 0 0 00 t12 t22 t32 t32 t32 0 0 0 00 0 t12 t22 t32 t32 t32 0 0 00 0 0 t12 t22 t32 t32 t32 0 00 0 0 0 t12 t22 t32 t32 t32 00 0 0 0 0 t12 t22 t32 t32 t32t02 t12 t22 t32 t32 t32 t32 0 0 00 t02 t12 t22 t32 t32 t32 t32 0 00 0 t02 t12 t22 t32 t32 t32 t32 00 0 0 t02 t12 t22 t32 t32 t32 t32
37777777777777775,
�N� �
26666666666666664
t32 t32 t32 t22 t12 0 0 0 0 00 t32 t32 t32 t22 t12 0 0 0 00 0 t32 t32 t32 t22 t12 0 0 00 0 0 t32 t32 t32 t22 t12 0 00 0 0 0 t32 t32 t32 t22 t12 00 0 0 0 0 t32 t32 t32 t22 t12t32 t32 t32 t32 t22 t12 t02 0 0 00 t32 t32 t32 t32 t22 t12 t02 0 00 0 t32 t32 t32 t32 t22 t12 t02 00 0 0 t32 t32 t32 t32 t22 t12 t02
37777777777777775
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390 387
After calculating the determinant of matrices [M ] and [N ], we know that the highest degrees ofnumerator and denominator for t2 are all 24. So expanding Eq. (19), 48th order polynomialequation will be obtained. It is
X24i�ÿ24
Eiti2 � 0 �20�
where Ei are constant numbers and only depend on the known structural parameters. Eq. (20)is the input±output equation. It provides 48 solutions for t2 in the complex ®eld. This iscorresponding to the 48 assembly con®gurations of the Barranov truss.
5. Solving the unknown variables
In the whole process of elimination, all the vectors are of the form of complex numbers. SoEq. (19) or (20) is a complex numbers equation. It can be directly solved by computer algebra.If we use the formula eiy��1� i tg�y=2��=�1ÿ i tg�y=2�� and substitute it into the input±outputequation, then all the imaginary part will equal to zero, the input±output equation will becomea real number equation about the real variable tg�y=2�. It can be dealt with by using normalmethod.Substituting roots of t2 into Eq. (18), we can get a set of equations for variable t3.
Considering the power products of t3 as linear homogeneous variables, using Cramer's rule, thesolutions for the variable t3 can be obtained. Since the system is linear, we can get only one t3for each t2.Substituting roots of t2 and t3 into Eqs. (9)±(12), a set of equations for variable t1 is
obtained. Considering the power products of t1 as linear homogeneous variables, we can alsoobtain one t1 for each set of solutions t2 and t3. Similarly, we can also get variable t4 fromEqs. (15) and (16).By using the Eular equations cos y � �eiy � eÿiy�=2 and sin y � �eiy ÿ eÿiy�=�2i�, the triangle
function for variables y1±y4 can be obtained. Furthermore, the coordinates of all the joints forthe Barranov truss can be easily gained.
6. Numerical example
A computer program for displacement analysis has been done. Here is a numerical example.The known parameters are A � 0� 0i, B � 12� 0i, C � 2� 12i, D � 14� 12i, a1 � 608,
a2 � 608, a3 � 908, a4 � 608, l1 � 12, l2 � 12, l3 � 20, l4 � 20, l5 � 12, l6 � 12, l7 � 12, l8 � 12,l9 � 12, l10 � 12, l11 � 20, l12 � 20.The results are shown in Table 1.
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390388
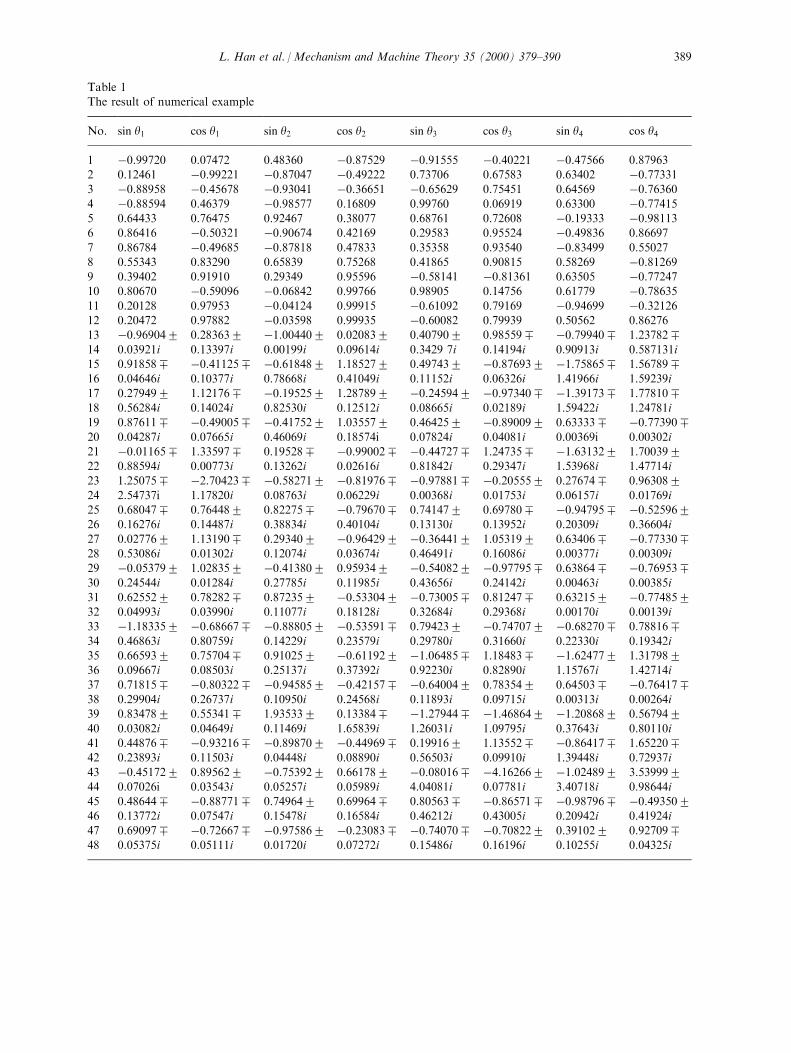
Table 1The result of numerical example
No. sin y1 cos y1 sin y2 cos y2 sin y3 cos y3 sin y4 cos y4
1 ÿ0.99720 0.07472 0.48360 ÿ0.87529 ÿ0.91555 ÿ0.40221 ÿ0.47566 0.879632 0.12461 ÿ0.99221 ÿ0.87047 ÿ0.49222 0.73706 0.67583 0.63402 ÿ0.773313 ÿ0.88958 ÿ0.45678 ÿ0.93041 ÿ0.36651 ÿ0.65629 0.75451 0.64569 ÿ0.763604 ÿ0.88594 0.46379 ÿ0.98577 0.16809 0.99760 0.06919 0.63300 ÿ0.774155 0.64433 0.76475 0.92467 0.38077 0.68761 0.72608 ÿ0.19333 ÿ0.981136 0.86416 ÿ0.50321 ÿ0.90674 0.42169 0.29583 0.95524 ÿ0.49836 0.86697
7 0.86784 ÿ0.49685 ÿ0.87818 0.47833 0.35358 0.93540 ÿ0.83499 0.550278 0.55343 0.83290 0.65839 0.75268 0.41865 0.90815 0.58269 ÿ0.812699 0.39402 0.91910 0.29349 0.95596 ÿ0.58141 ÿ0.81361 0.63505 ÿ0.7724710 0.80670 ÿ0.59096 ÿ0.06842 0.99766 0.98905 0.14756 0.61779 ÿ0.7863511 0.20128 0.97953 ÿ0.04124 0.99915 ÿ0.61092 0.79169 ÿ0.94699 ÿ0.3212612 0.20472 0.97882 ÿ0.03598 0.99935 ÿ0.60082 0.79939 0.50562 0.8627613 ÿ0.969042 0.283632 ÿ1.004402 0.020832 0.407902 0.985593 ÿ0.799403 1.23782314 0.03921i 0.13397i 0.00199i 0.09614i 0.3429 7i 0.14194i 0.90913i 0.587131i15 0.918583 ÿ0.411253 ÿ0.618482 1.185272 0.497432 ÿ0.876932 ÿ1.758653 1.56789316 0.04646i 0.10377i 0.78668i 0.41049i 0.11152i 0.06326i 1.41966i 1.59239i
17 0.279492 1.121763 ÿ0.195252 1.287892 ÿ0.245942 ÿ0.973403 ÿ1.391733 1.77810318 0.56284i 0.14024i 0.82530i 0.12512i 0.08665i 0.02189i 1.59422i 1.24781i19 0.876113 ÿ0.490053 ÿ0.417522 1.035572 0.464252 ÿ0.890092 0.633333 ÿ0.77390320 0.04287i 0.07665i 0.46069i 0.18574i 0.07824i 0.04081i 0.00369i 0.00302i21 ÿ0.011653 1.335973 0.195283 ÿ0.990023 ÿ0.447273 1.247353 ÿ1.631322 1.70039222 0.88594i 0.00773i 0.13262i 0.02616i 0.81842i 0.29347i 1.53968i 1.47714i23 1.250753 ÿ2.704233 ÿ0.582712 ÿ0.819763 ÿ0.978813 ÿ0.205552 0.276743 0.96308224 2.54737i 1.17820i 0.08763i 0.06229i 0.00368i 0.01753i 0.06157i 0.01769i25 0.680473 0.764482 0.822753 ÿ0.796703 0.741472 0.697803 ÿ0.947953 ÿ0.52596226 0.16276i 0.14487i 0.38834i 0.40104i 0.13130i 0.13952i 0.20309i 0.36604i
27 0.027762 1.131903 0.293402 ÿ0.964292 ÿ0.364412 1.053192 0.634063 ÿ0.77330328 0.53086i 0.01302i 0.12074i 0.03674i 0.46491i 0.16086i 0.00377i 0.00309i29 ÿ0.053792 1.028352 ÿ0.413802 0.959342 ÿ0.540822 ÿ0.977953 0.638643 ÿ0.76953330 0.24544i 0.01284i 0.27785i 0.11985i 0.43656i 0.24142i 0.00463i 0.00385i31 0.625522 0.782823 0.872352 ÿ0.533042 ÿ0.730053 0.812473 0.632152 ÿ0.77485232 0.04993i 0.03990i 0.11077i 0.18128i 0.32684i 0.29368i 0.00170i 0.00139i33 ÿ1.183352 ÿ0.686673 ÿ0.888052 ÿ0.535913 0.794232 ÿ0.747072 ÿ0.682703 0.78816334 0.46863i 0.80759i 0.14229i 0.23579i 0.29780i 0.31660i 0.22330i 0.19342i35 0.665932 0.757043 0.910252 ÿ0.611922 ÿ1.064853 1.184833 ÿ1.624772 1.31798236 0.09667i 0.08503i 0.25137i 0.37392i 0.92230i 0.82890i 1.15767i 1.42714i
37 0.718153 ÿ0.803223 ÿ0.945852 ÿ0.421573 ÿ0.640042 0.783542 0.645033 ÿ0.76417338 0.29904i 0.26737i 0.10950i 0.24568i 0.11893i 0.09715i 0.00313i 0.00264i39 0.834782 0.553413 1.935332 0.133843 ÿ1.279443 ÿ1.468642 ÿ1.208682 0.56794240 0.03082i 0.04649i 0.11469i 1.65839i 1.26031i 1.09795i 0.37643i 0.80110i41 0.448763 ÿ0.932163 ÿ0.898702 ÿ0.449693 0.199162 1.135523 ÿ0.864173 1.65220342 0.23893i 0.11503i 0.04448i 0.08890i 0.56503i 0.09910i 1.39448i 0.72937i
43 ÿ0.451722 0.895622 ÿ0.753922 0.661782 ÿ0.080163 ÿ4.162662 ÿ1.024892 3.53999244 0.07026i 0.03543i 0.05257i 0.05989i 4.04081i 0.07781i 3.40718i 0.98644i45 0.486443 ÿ0.887713 0.749642 0.699643 0.805633 ÿ0.865713 ÿ0.987963 ÿ0.49350246 0.13772i 0.07547i 0.15478i 0.16584i 0.46212i 0.43005i 0.20942i 0.41924i
47 0.690973 ÿ0.726673 ÿ0.975862 ÿ0.230833 ÿ0.740703 ÿ0.708222 0.391022 0.92709348 0.05375i 0.05111i 0.01720i 0.07272i 0.15486i 0.16196i 0.10255i 0.04325i
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390 389

7. Conclusions
One Barranov truss is equivalent to several Assur groups. These Assur groups have the samenumber of assembly con®gurations. In this paper, the closed-form displacement analysis forone kind of nine-link Barranov truss or a eight-link Assur group is studied. The 48th degreeinput±output equation is obtained. Moreover, all the eight kinds of eight-link Assur groupswhich are interrelated to this nine-link Barranov truss have 48 assembly con®gurations. Themethod used here is vector with complex numbers. It is e�ective for kinematics analysis ofmany kind of Barranov trusses and Assur groups.
References
[1] S. Liand, G.K. Matthew, Closed form kinematic analysis of planar Assur II groups: the theory of machines andmechanisms, in: Proceedings of the 7th World Congress, Spain, 1987, pp. 141±145.
[2] Clement M. Gosselin, Jaouad Sefrioui, Marc J. Richard, Solution polynomiales au problem de la cinematiquedirect des manipulateurs plans a trois degres de liberte, Mech. Mach. Theory 27 (2) (1992) 107±119.
[3] Jean-Pierre Merldt, Algebraic-geometry tools for the study of kinematics of parallel manipulators,
Computational Kinematics (1993) 183±194.[4] C.M. Gosselin, J.P. Merlet, The direct kinematics of planar parallel manipulators: special architectures and num-
ber of solution, Mech. Mach. Theory 29 (8) (1994) 1083±1098.[5] Carlo Innocenti, Position analysis in analytical form of the seven-link Assur kinematic chain featuring one tern-
ary link connected to ternary links only, Mech. Mach. Theory 32 (4) (1997) 501±509.[6] C. Wilson, J. Sadler, W. Michels, Kinematics and Dynamics of Machinery, Harper and Row, New York, 1983.[7] Daniali H.R.M. Monammadi, et al., Singularity analysis of planar parallel manipulators, Mech. Mach. Theory
30 (5) (1995) 665±678.[8] Roger Boudreau, Noyan Turkkan, Solving the forward kinematics of parallel manipulators with a genetic algor-
ithm, Journal of Robotic Systems 13 (2) (1996) 111±125.
[9] S. Bawab, G.L. Kinzel, A hybrid approach to solving the position equations for planar mechanisms, Journal ofMechanical Design, Transactions of the ASME 117 (1995) 627±631.
L. Han et al. / Mechanism and Machine Theory 35 (2000) 379±390390