Click icon to add picture SmartSpaghetti: Accurate and Robust Tracking of Human's Location Mostafa...
17
Click icon to add picture Click icon to add picture Click icon to add picture Click icon to add picture SmartSpaghetti: Accurate and Robust Tracking of Human's Location Mostafa Uddin, Ajay Gupta, Kurt Maly, and Tamer Nadeem
-
Upload
drusilla-wheeler -
Category
Documents
-
view
215 -
download
0
Transcript of Click icon to add picture SmartSpaghetti: Accurate and Robust Tracking of Human's Location Mostafa...
Click icon to add picture
Click icon to add pictureClick icon to add picture
Click icon to add picture
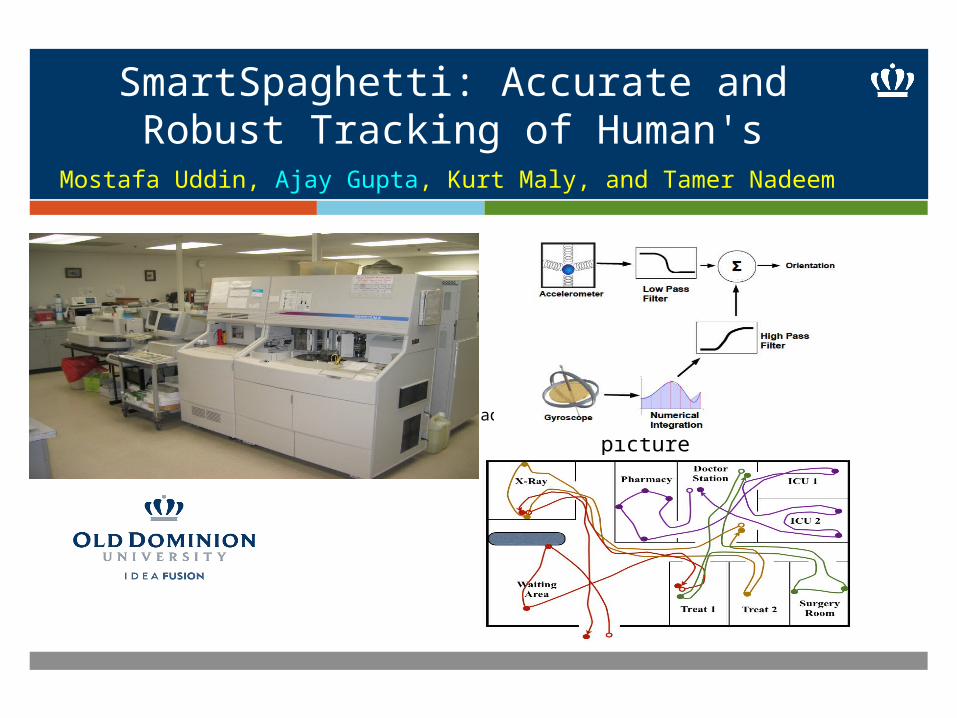
SmartSpaghetti: Accurate and Robust Tracking of Human's Location
Mostafa Uddin, Ajay Gupta, Kurt Maly, and Tamer Nadeem

Introduction and Background.
Lean
Spaghetti
Motivation: Current Spaghetti system
SmartSpaghetti
Challenges
Distance Estimation
Stride detection
Personalized Stride Model
Direction Estimation
Principal Component Analysis
Outline
High Quality, economically-efficient healthcare management is one of the key economic, societal, and scientific challenge.
In USA, several federal agencies are focusing on improving the healthcare management system.
Many leading healthcare institute are following a management approach called, Lean
Lean is quality improvement philosophy that process to maximize customer value and minimize the waste.
Healthcare Management: Lean
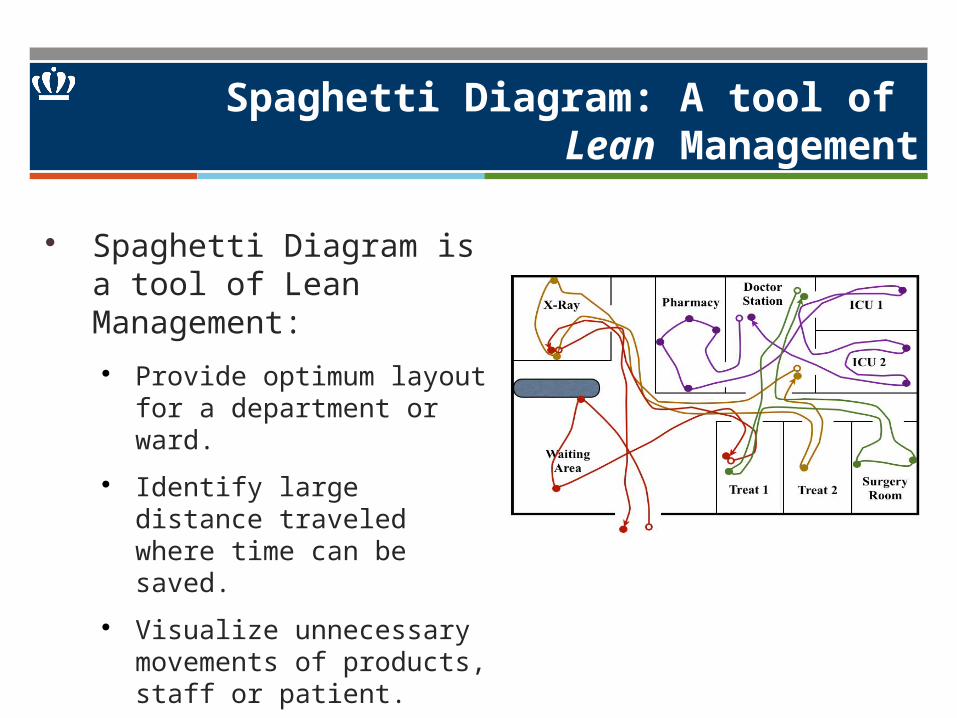
Spaghetti Diagram is a tool of Lean Management:
Provide optimum layout for a department or ward.
Identify large distance traveled where time can be saved.
Visualize unnecessary movements of products, staff or patient.
Spaghetti Diagram: A tool of Lean Management

Currently Spaghetti Diagram is created manually by visually observing and manually drawing the movement of the staff member or patient.
Existing approach has several challenges:
The layout of some areas is not visually surveyed. The layout consists of many isolated islands. The workstation is not standardized Very inefficient and tedious.
Spaghetti Diagram: Current Approach

We proposed the SmartSpaghetti: A Smartphone based solution.
It leverages the inertia sensors(i.e. Accelerometer, gyroscope, magnetic sensor etc.) on smartphones carried by physicians and staff members.
It estimate the changes in user's direction as well as user's traveled distances.
It maps the user's movement to flow paths to generate the Spaghetti Diagram.
SmartSpaghetti: A Smartphone Solution

In distance estimation, It is challenging to convert number of strides to actual distance traveled.
Stride length varies from user to users based on their height and weight.
Same user stride length varies with the speed of walk.
In detecting users direction changes, regardless of the position and orientation of the smartphone is challenging.
Compass/magnetic field sensor is noisy in indoor environment.
SmartSpaghetti: Challenges

In distance estimation we estimate the distance at each stride. We have following two actions in distance estimation,
Stride Detector: We apply adaptive Dynamic Time Wrapping(DTW) algorithm to detect the stride and the stride's speed.
Personalized Stride Model: We build personalized stride length model that map the speed of strides to the stride length.
SmartSpaghetti: Distance Estimation

Our adaptive DTW algorithm not only detect or identify the patter of user's stride but also measure the speed of the user's stride.
The adaptive DTW algorithm also uses shifting window algorithm that addresses the challenge of different walking speeds.
More details about the algorithm is in the paper.
Distance Estimation: Stride Detector

We use commonly used linear stride length model that map the speed of the stride to the stride's length.
s = a x f + b s, is the stride length, and f is the speed of the stride in second.
a,b are model parameters that are person-dependent.
We calculate model parameters, by telling user to take fixed number of strides, then we measure the traveled distance to calculate the model parameters.
Distance Estimation: Personalized StrideModel

Estimated stride length error by building the stride model from 5, 10, and 15 number of strides.
Distance Estimation: Evaluation

Adaptive Stride length estimation error for two different speed of walking.
Distance Estimation: Evaluation

In direction estimation we consider three co-ordinate system and their relation to each other.
Phones's co-ordinate can vary for different orientation of the phone.
Human walking direction co-ordinate system represents forward direction(F), side(S), and gravity(G). It also changes with the direction of human's movement.
Global co-ordinate is a fixed co-ordinate system that represents north pole(N), east(E), and gravity(G).
SmartSpaghetti: Direction Estimation
North
East
Gravity
Global Co-ordinate
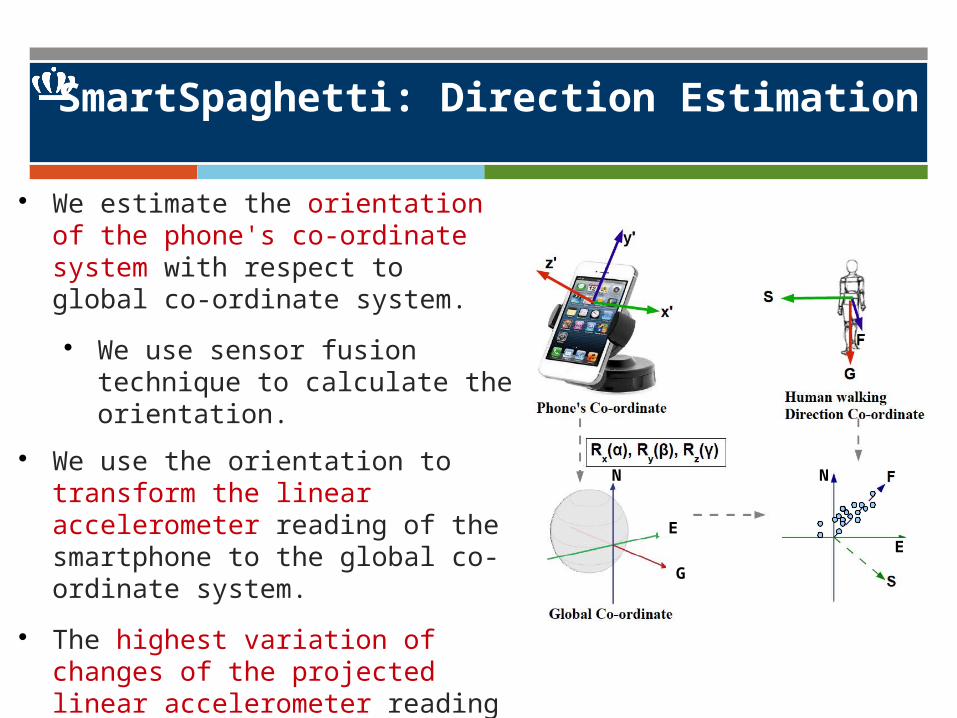
We estimate the orientation of the phone's co-ordinate system with respect to global co-ordinate system.
We use sensor fusion technique to calculate the orientation.
We use the orientation to transform the linear accelerometer reading of the smartphone to the global co-ordinate system.
The highest variation of changes of the projected linear accelerometer reading in the N-E plane of the global co-ordinate represents the Forward direction (F) axis of the human's walking co-ordinate system.
SmartSpaghetti: Direction Estimation
N
E
N
G
N
E

We apply the Principal Component Analysis(PCA) on the transformed samples to find out the F axis in the N-E plane.
We use 25 samples as our PCA window.
Left figures show four sequential PCA window, where use took a 90 degree turn from PCA window 2 to 3.
Blue line represents the human's walking direction.
Direction Estimation: PCA

While walking straight 98% of the estimated direction change is less then 10 degrees.
Sequence of actual direction changes(x axis) and the estimated direction changes(y axis)
Direction Estimation: Evaluation

Develop a stride detection algorithm to detect user's stride and speeds.
Proposing algorithm to estimate different stride lengths correspond to different user and different speeds.
Develop robust direction change detection algorithm based on PCA and sensor fusion.
In Summary
Thank You