Class 11 mathematical modeling of pneumatic and hydraulic systems
25
ICE401: PROCESS INSTRUMENTATION AND CONTROL Class 11 Mathematical Modeling of Pneumatic and Hydraulic Systems Dr. S. Meenatchisundaram Email: [email protected] Process Instrumentation and Control (ICE 401) Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
-
Upload
manipal-institute-of-technology -
Category
Engineering
-
view
1.536 -
download
3
Transcript of Class 11 mathematical modeling of pneumatic and hydraulic systems

ICE401: PROCESS INSTRUMENTATION
AND CONTROL
Class 11
Mathematical Modeling of Pneumatic and Hydraulic Systems
Dr. S. Meenatchisundaram
Email: [email protected]
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Pneumatic system uses compressible fluid as working
medium and it is usually air.
• In pneumatic systems, compressibility effects of gas cannot
be neglected and hence dynamic equations are obtained using
conservation of mass.
• In pneumatic systems, change in fluid inertia energy and the
fluid’s internal thermal energy are assumed negligible.
• In pneumatic system, the mass and volume flow rates are not
readily interchangeable.
• Pneumatic devices involve the flow of gas or air, through
connected pipe lines and pressure vessels.

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Hence, the variables of pneumatic system are mass flow rate,
qm, and pressure P.
• The mass flow rate is a through variable and it is analogous
to current. The pressure variable is across variable and is
analogous to voltage.
• The two basic elements of a pneumatic system are the
resistance and capacitance.
• The gas flow resistance, R is defined as the rate of change in
gas pressure difference for a change in gas flow rate.
( )( )
2/
/ sec
Changein gas pressure difference N mR
Changein gas flowrate Kg=

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Pneumatic capacitance is defined for a pressure vessel and
depends on the type of expansion process involved.
• The capacitance of a pressure vessel may be defined as the
ratio of change in gas stored for a change in gas pressure.
( )
( )2/
Changein gas stored KgC
Changein gas pressure N m=

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
Pros and Cons of Pneumatic systems:
• Advantages
– The air or gas used is non inflammable and so it offerssafety from fire hazards.
– The air or gas has negligible viscosity, compared to highviscosity of hydraulic fluids.
– No return pipelines are required and since air can be letout at the end of work cycle.
• Disadvantage
– The response is slower than that of hydraulic systemsbecause of the compressibility of the working fluid.

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
Applications of Pneumatic systems:
• Guided Missiles
• Aircraft systems
• Automation of production machines
• Automatic controllers
• Many more……

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
Pi = air pressure of the source at steady state (newton/m2)
P0 = air pressure in the vessel at steady state (newton/m2)
∆ Pi = small change in air pressure of the source from its steady state
∆ P0 = small change in air pressure of the vessel from its steady state

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Rate of gas storage in vessel = rate of gas inflow
• Applying Laplace and rearranging the terms, we get
0 0id P P PP
Cdt R R
∆ ∆ − ∆∆= =
0 ( ) 1
( ) ( 1)i
P s
P s RCs
∆=
∆ +

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
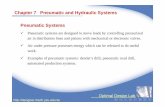
Consider the system shown below:

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
Let
Steady-state value of input air pressure
Increase in the pressure of air-source
Steady-state value of pressure inside the bellows
P = Increase in pressure inside the bellow
Steady state value of air flow rate
qm = Increase in air flow rate
A = Area of each flat surface of the bellows
R = Resistance of the restriction
C = Capacitance of the bellows.
x = Displacement of the movable surface of the bellows
iP =
ip =
P =
mQ =

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Let the pressure of air source be increased from its steady
state value by an amount Pi.
• This results in an increase in air flow by qm and increase in
the pressure inside the bellows by p.
• Due to increase in pressure, there will be a displacement of
the movable surface of the bellows, by an amount x.
• Here, the terms Pi, qm, p and x are all functions of time, t and
therefore can be expressed as Pi(t), qm(t) p(t) and x(t) .
• The force exerted on the movable surface of the bellows is
proportional to increase in pressure inside the bellows,
i.e, Fb ∝ p(t)

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Force exerted on the movable surface of the bellow,
Fb =A p(t) (8.1)
• The force opposing the movement of the flat surface of
bellow walls is proportional to the displacement, i.e.,
F0 ∝ x(t) (8.2)
• Force opposing the motion,
F0 =K x(t) (8.3)
• Where, K is a constant representing the stiffness of the
bellows. At steady state the above two forces are balanced,
Fb = F0 → A p(t) =K x(t) (8.4)

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• The resistance R can be given as,
• Rearranging, (8.5)
• The Capacitance C can be given as,
• Rearranging,
(8.6)
( ) ( )Difference between Change in pressure
Change in air flow rate ( )
i
m
p t p tR
q t
−= =
( ) ( )( ) i
m
p t p tq t
R
−=
( )Change in air flow rate
( )Rate of change of pressure
mq tC
dp tdt
= =
( )( )
m
dp tq t C
dt=

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Equating eqn. 8.5 and 8.6,
(8.7)
• Rearranging, (8.8)
• From the eqn. 8.4,
(8.9)
• Differentiating eqn. 8.9 yields,
(8.10)
• Substituting eqn. 8.10 into 8.8,
( ) ( )( ) ip t p tdp tC
dt R
−=
( )( ) ( )
i
dp tRC p t p t
dt+ =
( ) ( )K
p t x tA
=
( ) ( )dp t K dx t
dt A dt=

Pneumatic System:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
(8.11)
• Taking Laplace
(8.12)
• Rearranging,
(8.13)
• Where,
( )( ) ( )i
K dx t KRC x t p t
A dt A+ =
( ) ( ) ( )i
K KRC sX s X s P s
A A+ =
( )
( ) 1 1i
A AX s K K
P s RCs sτ= =
+ +
RCτ =

Hydraulic Systems:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• They are used in hydraulic feedback systems and in combined
electro-mechanical-hydraulic systems.
• In hydraulic devices, power is transmitted through the action of
fluid flow under pressure and the fluid is incompressible.
• The fluid used are petroleum based oils and non – inflammable
synthetic oils.
• Hydraulic devices used in control systems are generally
classified as hydraulic motors and hydraulic linear actuators.
• The output of a hydraulic motor is rotary motion.
• The hydraulic motor is physically smaller in size than an
electric motor for the same output.

Hydraulic Systems:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Applications are power steering and brakes in automobiles,
steering mechanisms in large ships, control of machine tools
etc.
Advantages:
• Hydraulic fluid acts as a lubricant and coolant.
Comparatively small sized hydraulic actuators can develop
large forces or torques.
• Hydraulic actuators can be operated under continuous,
intermittent reversing and stalled conditions without damage
• Hydraulic actuators have a higher speed of response. They
offer fast starts, stops and speed reversals.

Hydraulic Systems:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• With availability of both linear and rotary actuators, the
design has become more flexible.
• Because of low leakages in hydraulic actuators, when loads
are applied the drop in speed will be small.
• Hydraulic components are more rugged than their
counterparts.
Disadvantages:
• Hydraulic power is not readily available compared to electric
power.
• Inherent problems of leaks and sealing them against foreign
particles.

Hydraulic Systems:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Operating noise
• Costs more compared to electrical system
• Fire and explosion hazards exist
• Hydraulic lines are not flexible as electric cables
• Highly non linear response

Hydraulic Systems:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015

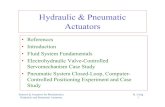
Hydraulic Systems:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
Let
• qp = Rate at which the oil flows from the pump
• qm = Oil flow rate through the motor
• qi = Leakage flow rate
• qc = Compressibility flow rate
• x = Input stroke length
• θ = Output angular displacement of motor
• P = Pressure drop across motor

Hydraulic Systems:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• The rate at which the oil flow from the pump is proportional to
stroke angle, i.e., qp ∝ x.
• Oil flow rate from the pump, qp = Kp x
• Where Kp is a constant and is equal to the ratio of rate of oil
flow to unit stroke angle.
• The rate of oil flow through the motor is proportional to motor
speed, i.e.,
• Therefore, Oil flow rate through motor
• Where, Km = Motor displacement constant.
m
dq
dt
θ∝
m m
dq K
dt
θ=

Hydraulic Systems:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• All the oil from the pump does not flow through the motor in
the proper channels.
• Due to back pressure in the motor, a portion of the ideal flow
from the pump leaks back past the pistons of motor and
pump.
• The back pressure is the pressure that is built up by the
hydraulic flow to overcome the resistance to free movement
offered by load on motor shaft.
• It is usually assumed that the leakage flow is proportional to
motor pressure, i.e. qi ∝ P

Hydraulic Systems:
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015
• Therefore, Leakage flow rate, qi= Ki P
• Where Ki = constant.
• The back pressure built up by the motor not only causes
leakage flow in the motor and pump but also causes the oil in
the lines to compress.
• Volume compressibility flow is essentially proportional to
pressure and therefore the rate of flow is proportional to the
rate of change of pressure, i.e.,
→ Try the rest.c
dPq
dt∝

References:
• Modern Control Engineering, 5th Edition, by Katsuhiko Ogata.
• Advanced Control Systems Engineering, Ronald Burns
• Control Systems, Nagoor Kani.
• A course in Electrical, Electronic Measurements and
Instrumentation, A.K. Sawhney.
Process Instrumentation and Control (ICE 401)
Dr. S.Meenatchisundaram, MIT, Manipal, Jan – May 2015