CHAPTER 8: Nonparametric Methods Alpaydin transparencies significantly modified, extended and...
24
CHAPTER 8: Nonparametric Methods Alpaydin transparencies significantly modified, extended and changed by Last updated: March 4, 20
-
Upload
ambrose-mclaughlin -
Category
Documents
-
view
236 -
download
1
description
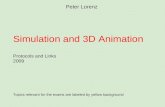
Histograms Histogram Usually shows the distribution of values of a single variable Divide the values into bins and show a bar plot of the number of objects in each bin. The height of each bar indicates the number of objects Shape of histogram depends on the number of bins Example: Petal Width (10 and 20 bins, respectively)
Transcript of CHAPTER 8: Nonparametric Methods Alpaydin transparencies significantly modified, extended and...

CHAPTER 8:
Nonparametric Methods
Alpaydin transparencies significantly modified, extended and changed by Ch. Eick
Last updated: March 4, 2011

Eick/Alpaydin: Non-Parametric Density Estimation 2
Non-Parametric Density Estimation Goal is to obtain a density function:
http://en.wikipedia.org/wiki/Probability_density_function
Parametric (single global model), semiparametric (small number of local models)
Nonparametric: Similar inputs have similar outputs Keep the training data;“let the data speak for itself” Given x, find a small number of closest training
instances and interpolate from these Aka lazy/memory-based/case-based/instance-based
learning

Histograms Histogram
Usually shows the distribution of values of a single variable Divide the values into bins and show a bar plot of the
number of objects in each bin. The height of each bar indicates the number of objects Shape of histogram depends on the number of bins
Example: Petal Width (10 and 20 bins, respectively)

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)4
Density Estimation
Given the training set X={xt}t drawn iid from p(x) Divide data into bins of size h, stating from origin xo
Histogram:
Naive estimator:
or
Nh
xxxpt asbin same in the #ˆ
Nh
hxxhxxpt 2/2/#ˆ
otherwise01if 21 1
1
u/uwh
xxwNh
xpN
t
t
Typo corrected on March 5 2011

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)5
Origin 0; h(1)=4/16
h(1.25)=1/8

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)6
h(2)=2/2*8=0.125

7
Gaussian Kernel Estimator Kernel function, e.g., Gaussian kernel:
Kernel estimator (Parzen windows):
Gaussian Influence Functions in general:
N
t
t
hxxdK
Nhxp
1
),(1ˆ
2exp
21 2uuK
Influence of xt on x; h determines how quickly influence decreases as distance between xt and x increases; h is called “width” of kernel.
Eick/Alpaydin: Non-Parametric Density Estimation
Query point
hbadbaluence
2),(exp
21),(inf
2

8
Example: Kernel Density Estimation
D={x1,x2,x3,x4}fD
Gaussian(x)= influence(x1,x) + influence(x2,x) + influence(x3,x) + influence(x4,x)= 0.04+0.06+0.08+0.6=0.78x1
x2
x3
x4x 0.6
0.08
0.06
0.04
y
Remark: the density value of y would be larger than the one for xEick/Alpaydin: Non-Parametric Density Estimation
2)/)((exp
21,
2
infhbabaluence

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)9
10
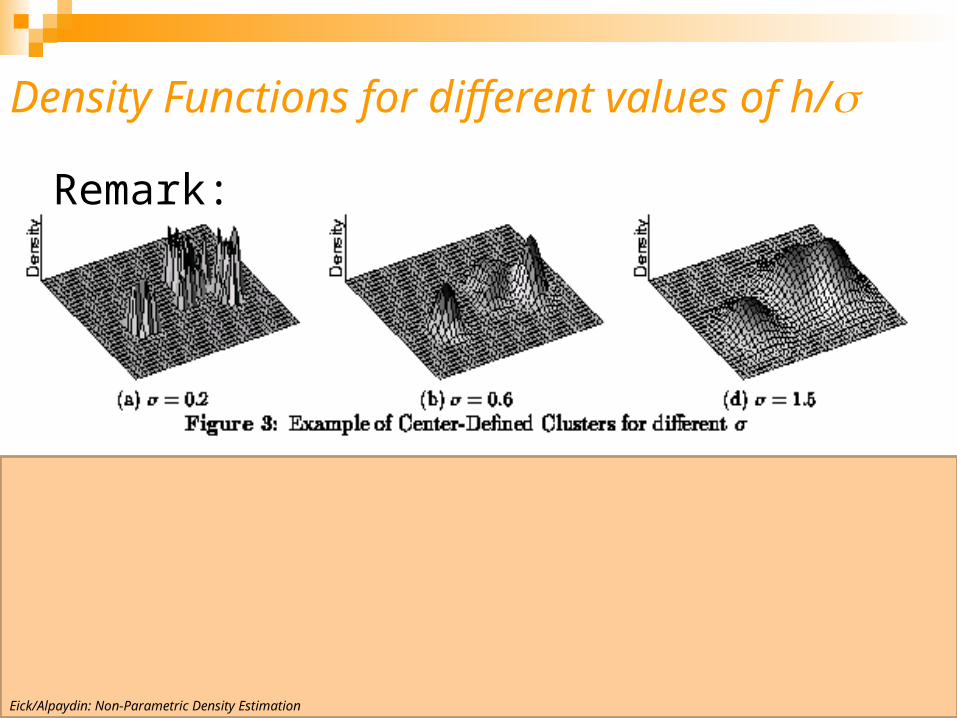
Density Functions for different values of h/
Remark:
Eick/Alpaydin: Non-Parametric Density Estimation

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)11
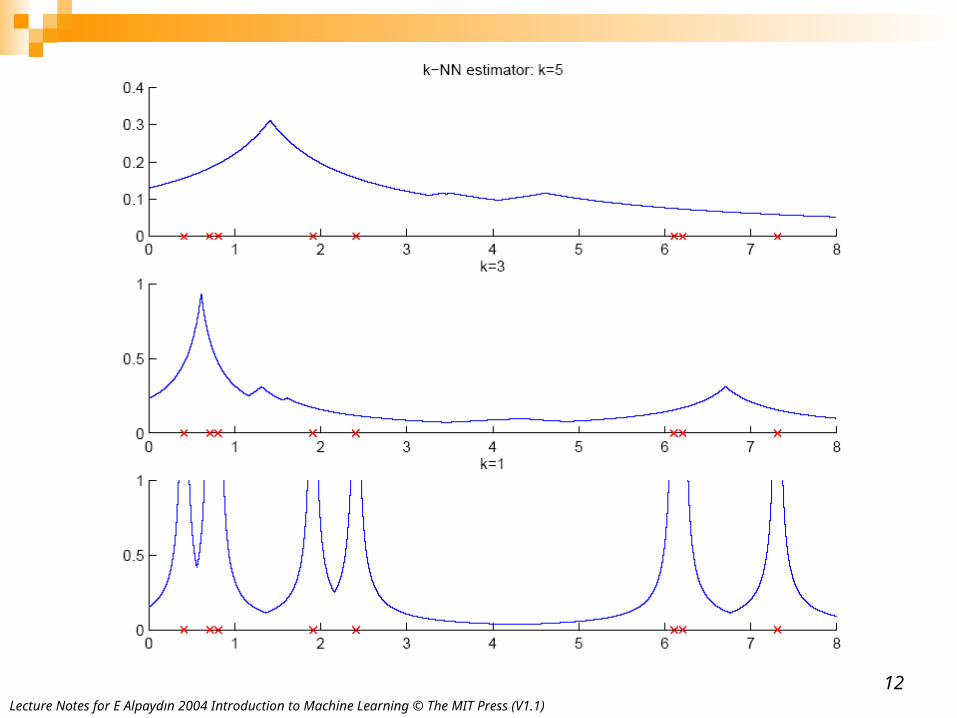
k-Nearest Neighbor Estimator
Instead of fixing bin width h and counting the number of instances, fix the instances (neighbors) k and check bin width
dk(x), distance to kth closest instance to x
xNdkxpk2
ˆ
Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)12

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)13
Multivariate Data Kernel density estimator
Multivariate Gaussian kernel
spheric
ellipsoid
N
t
t
d hK
Nhp
1
1 xxx
uuu
uu
1212
2
21exp
21
2exp21
SS
T//d
d
K
K
Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)14
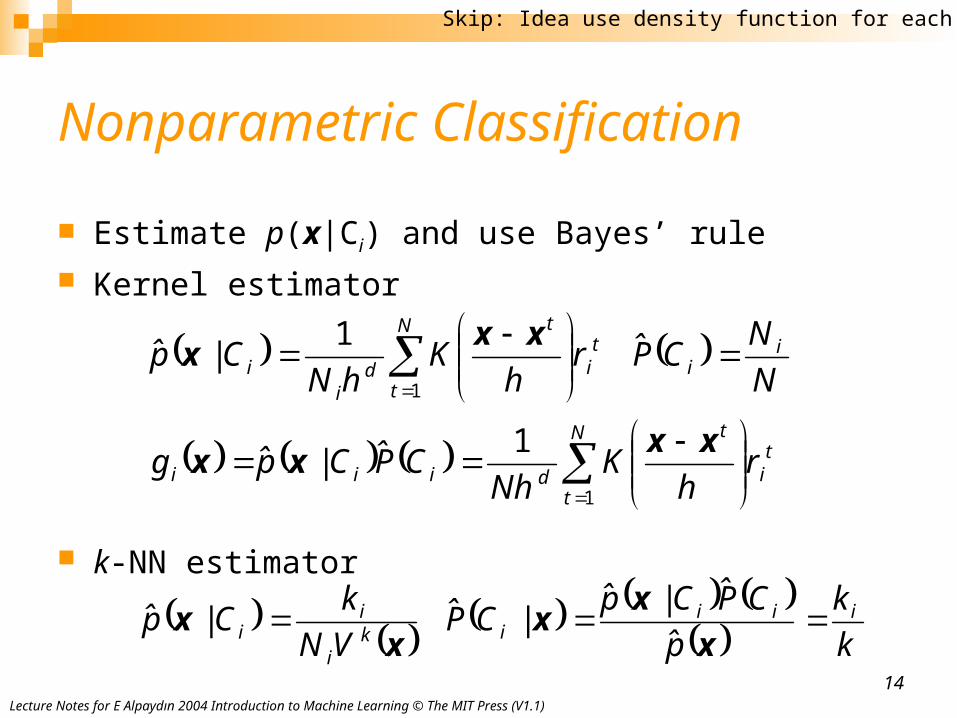
Nonparametric Classification
Estimate p(x|Ci) and use Bayes’ rule Kernel estimator
k-NN estimator
ti
N
t
t
diii
ii
ti
N
t
t
di
i
rh
KNh
CPCpg
NNCPr
hK
hNCp
1
1
1|
1|
xxxx
xxx
k
kp
CPCpCPVNkCp iii
iki
ii
xxx
xx || |
Skip: Idea use density function for each class

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)15
Condensed Nearest Neighbor
Time/space complexity of k-NN is O (N) Find a subset Z of X that is small and is accurate
in classifying X (Hart, 1968)
ZZXXZ || E'E
skip

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)16
Condensed Nearest Neighbor
Incremental algorithm: Add instance if needed
skip

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)17
Nonparametric Regression Aka smoothing models Regressogram
otherwise0|-x| if1
,
otherwise0bin with same in the is if1
,
where,
,ˆ1
1
hxxxb
xxxxb
xxbrxxbxg
t
t
t
t
Nt
t
tNt
t
Idea: use averageof the output variable in a neighborhood of x

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)18
uses bins to define neighborhoods

19
Running mean smoother
Running line smoother
Running Mean/Kernel Smoother
Kernel smoother
where K( ) is Gaussian
Additive models (Hastie and Tibshirani, 1990)
otherwise0 1if 1
where
1
1
uuw
hxxw
rh
xxwxg
N
t
t
tN
t
t
N
t
t
tN
t
t
hxxK
rhxxK
xg
1
1
ˆ
Idea: weights example inversely by their distance to x.
Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)20
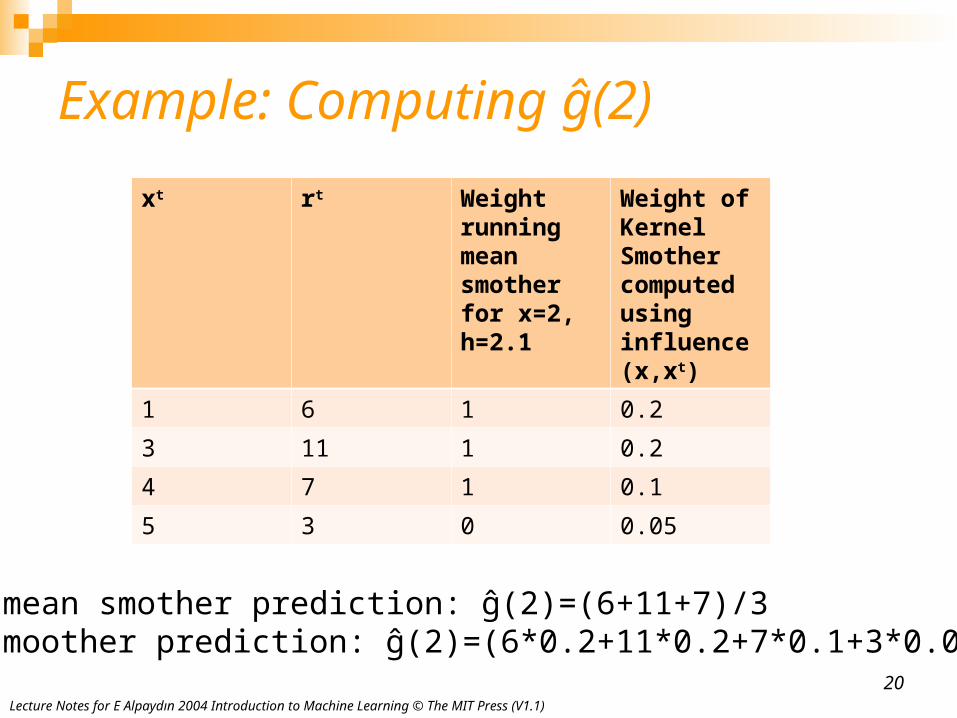
Example: Computing ĝ(2)xt rt Weight
running mean smother for x=2, h=2.1
Weight of Kernel Smother computed using influence(x,xt)
1 6 1 0.23 11 1 0.24 7 1 0.15 3 0 0.05
Running mean smother prediction: ĝ(2)=(6+11+7)/3Kernel smoother prediction: ĝ(2)=(6*0.2+11*0.2+7*0.1+3*0.05)/0.55
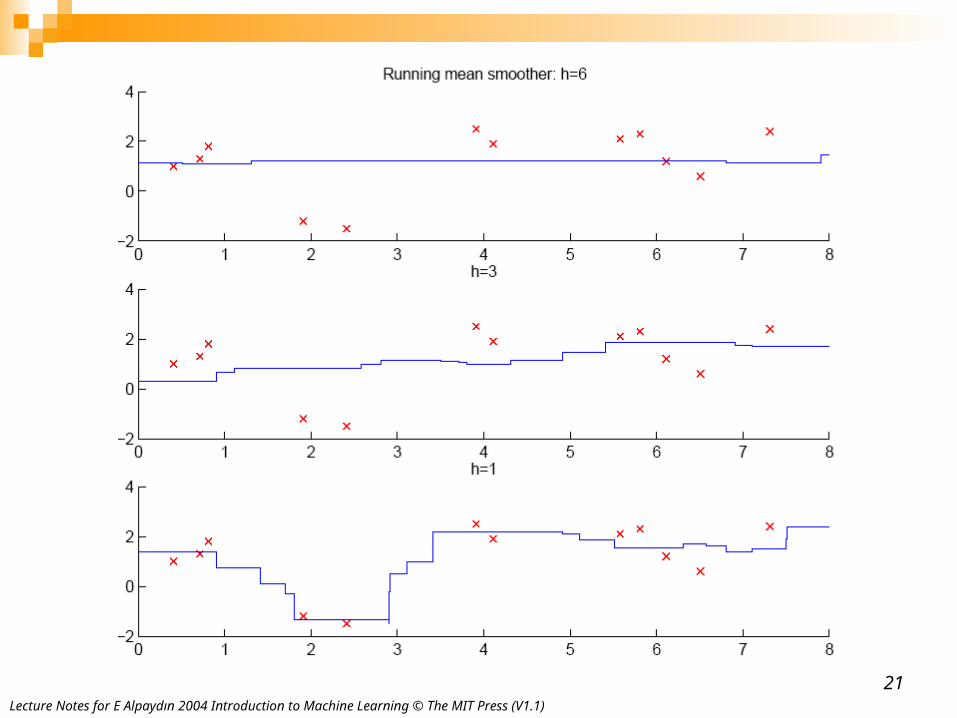
Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)21

Lecture Notes for E Alpaydın 2004 Introduction to Machine Learning © The MIT Press (V1.1)22
Idea: Uses influence function to determine weight

23
Smoothness/Smooth Functions depends on a function’s discontinuities and on how
quickly its first/second/third/… derivative changes A smooth function is a continuous function whose
derivatives change quite slowly Smooth function are frequently preferred as
models of systems and decision making small changes in input result in small changes in output
Design: Smooth surfaces are more appealing; e.g. car or sofa design

24
Choosing h/k When k or h is small, single instances matter; bias is
small, variance is large (undersmoothing): High complexity
As k or h increases, we average over more instances and variance decreases but bias increases (oversmoothing): Low complexity
h/k large: very few hills/smooth h/k small: a lot of hills; a lot of changes/discontinuities
in the first/second/third/… derivative Cross-validation is used to finetune k or h.