Chapitre 8 Optimisation - chamilo2.grenet.frchamilo2.grenet.fr/.../GOT_06_Optimisation.pdf ·...
61
"Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", Jean-Louis COULOMB, EGEM, Hermes (2002) (version du 14/12/2002) Chapitre 8 Optimisation 16.1. Introduction 16.1.1. L’optimisation, pour qui, pourquoi, comment ? Durant la conception d’un dispositif électromagnétique, le concepteur doit proposer une configuration satisfaisant au mieux les besoins fonctionnels, et en même temps, viable d’un point de vue économique. La distribution du champ électromagnétique intervient alors bien souvent de façon importante sur les caractéristiques à optimiser. Voici quelques problèmes de conception dans lesquels une connaissance fine du comportement physique est nécessaire : – minimisation du couple réluctant dans une machine tournante ;
Transcript of Chapitre 8 Optimisation - chamilo2.grenet.frchamilo2.grenet.fr/.../GOT_06_Optimisation.pdf ·...

"Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", Jean-Louis COULOMB, EGEM, Hermes (2002) (version du 14/12/2002)
Chapitre 8
Optimisation
16.1. Introduction
16.1.1. L’optimisation, pour qui, pourquoi, comment ?
Durant la conception d’un dispositif électromagnétique, le concepteur doit proposer une configuration satisfaisant au mieux les besoins fonctionnels, et en même temps, viable d’un point de vue économique.
La distribution du champ électromagnétique intervient alors bien souvent de façon importante sur les caractéristiques à optimiser. Voici quelques problèmes de conception dans lesquels une connaissance fine du comportement physique est nécessaire :
– minimisation du couple réluctant dans une machine tournante ;

2 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
– obtention d’une force de rappel avec minimisation des pertes joules dans un électroaimant ;
– … ;
Le critère à maximiser ou minimiser est une grandeur scalaire significative de l’objectif à atteindre. Il peut s’agir d’une grandeur intrinsèque au dispositif étudié (un couple, une force, les pertes totales, …) ou d’une combinaison de plusieurs mesures d’espace ou de temps (induction sinusoïdale dans l’entrefer d’une machine tournante, trajectoire de fermeture d’un contacteur électromagnétique, …). D’ailleurs, le critère n’étant pas toujours unique, il faut parfois composer avec une optimisation multicritère.
La recherche de la meilleure performance d’un dispositif dans laquelle interviennent des paramètres structurels (nombre de dents, type des encoches, …), dimensionnels (dimension d’un entrefer, largeur des encoches, …) et physiques (type de matériaux, densité de courant, …) est un problème difficile. Cela est dû, en grande partie, à la complexité des phénomènes qui apparaissent seuls ou conjugués : les saturations magnétiques, les courants de Foucault, les effets tridimensionnels, les mouvements relatifs de pièces, les couplages électriques, les couplages multiphysiques, …
Le respect des contraintes portant sur la faisabilité (entrefer supérieur à une valeur minimale, …) ou sur les caractéristiques du dispositif (saturation des tôles inférieure à un taux raisonnable, pertes inférieures à un plafond imposé, …), ajoute encore de la difficulté.
De fait, cette optimisation est le plus souvent hors de portée d’une étude paramétrique classique et nécessite alors l’utilisation de procédures plus puissantes combinant simulation numérique et outil d’optimisation.

Optimisation (Jean-Louis COULOMB) 3
16.1.2. L’optimisation par simulation numérique, est-ce bien raisonnable ?
Pour modéliser le dispositif avant sa production, nous pouvons utiliser les ressources de la Conception Assistée par Ordinateur (CAO), basée sur l’application de méthodes numériques.
Dans le domaine du calcul de champ, la méthode des éléments finis (MEF) occupe une place de première importante dans la panoplie numérique, car elle est en mesure de traiter à la fois les géométries et les phénomènes complexes rencontrés en électromagnétisme [SIL 83], [SAB 86] et dans les disciplines connexes [ZIE 79], [DHA 84]. D’autres méthodes générales, telles que la méthode des intégrales de frontière [DUR 64] ou des différences finies [DUR 64], [LAI 67], [DUR 68] sont utilisées. Parfois, l’utilisation de méthodes plus spécifiques, telle que la méthode des dipôles magnétiques [HOO 89], des circuits magnétiques équivalents [ROT 41] ou des circuits électriques partiels équivalents [CLA 96], est particulièrement indiquée.
Cependant, une simulation numérique est bien souvent coûteuse en terme de temps de calcul (une heure, une nuit, …, une semaine). Cette particularité devient un problème lorsqu’il est question d’optimiser le dispositif étudié. En effet, l’application des méthodes d’optimisation nécessite de nombreuses simulations numériques (au mieux, des dizaines lorsqu’il est possible d’utiliser un algorithme d’optimisation déterministe performant, au pire, des milliers lorsque la recherche d’un optimum global est effectuée grâce à un algorithme évolutionniste) et peut donc induire un coût global des simulations prohibitif qui la met hors de portée d’un usage courant.
16.1.3. L’optimisation par simulation numérique, des difficultés.
Nous venons de le voir, les phénomènes physiques intervenant dans les dispositifs électromagnétiques sont complexes. Les outils de simulation qui sont à notre disposition sont certes puissants mais induisent des lourdeurs. Pour résumer, les problèmes d’optimisation apparaissant alors possèdent les caractéristiques suivantes :

4 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
– La fonction qualité peut être multi-objectif ; – L’optimisation doit respecter certaines contraintes ; – La fonction qualité f(x) est non linéaire ; – La loi de variation directe de la fonction qualité f(x) est inconnue ; – La plupart du temps, on ne dispose pas d’information sur le gradient de f(x) ; – La plupart du temps, la détermination de la fonction qualité f(x) est onéreuse ; – La fonction qualité f(x) est perturbée par des erreurs de méthode, dues
notamment aux discrétisations dans l’espace et le temps.
Ces caractéristiques proviennent à la fois des phénomènes étudiés et des outils les modélisant et sont la source de bien des difficultés dans la mise en œuvre de l’optimisation.
16.1.4. Les plans d’expériences numériques, une solution élégante.
Cette problématique est connue des expérimentateurs qui ont, bien avant l’ère numérique, dû faire face aux délais et aux coûts liés à la recherche expérimentale d’une solution acceptable. La solution, ayant notamment pour origine les travaux de Fisher [FIS 35], Box [BOX 78] et Taguchi [TAG 87], est désormais bien établie dans les domaines où l’étude expérimentale joue un rôle prépondérant (agronomie, chimie, …). Il s’agit de la méthode des Plans d’Expériences (ou Design of Experiments en anglais) qui se transpose très bien dans le monde numérique et que l’on appelle alors la méthode des Plans d’Expériences Numériques [BRA 94], [SCH 98] [GIL 98].
La méthode des Plans d’Expériences est particulièrement bien adaptée aux problèmes d’optimisation ayant un nombre respectable de paramètres (quelques dizaines), un coût unitaire de l’expérience élevé et des résultats soumis à des effets aléatoires.
En voici les principales étapes :

Optimisation (Jean-Louis COULOMB) 5
– en premier lieu, la méthode propose d’effectuer un « débroussaillage » (ou « screening » en anglais), c’est-à-dire de déterminer les paramètres les plus influents dans le dispositif étudié (le but est de réduire le nombre de paramètres effectifs de quelques dizaines à quelques unités) ;
– ensuite, la méthode propose d’élaborer une « surface de réponse » donnant une approximation numérique de la réponse en fonction des paramètres les plus influents ;
– enfin, la méthode propose d’exploiter cette surface de réponse, soit pour prédiction (interpolation de la réponse pour une nouvelle combinaison des paramètres), soit pour optimisation (recherche d’une combinaison de paramètres qui optimise un certain critère).
Les deux premières étapes nécessitent la réalisation d’expériences avec des combinaisons des paramètres d’entrée imposées par le plan d’expériences choisi. La troisième étape ne nécessite aucune expérimentation supplémentaire (si ce n’est un contrôle du résultat final) et est donc très peu coûteuse comparée aux étapes qui la précèdent.
Dans son concept initial, la méthode des plans d’expériences intègre la variabilité inhérente à toute démarche expérimentale. Elle propose notamment de répéter plusieurs fois une même expérience pour moyenner les résultats et connaître l’écart type. De plus, les points expérimentaux préconisés favorisent l’excursion maximale dans le domaine, ce qui, indirectement, minimise l’impact des erreurs.
Dans sa transposition numérique, il est courant de négliger la variabilité des résultats de la simulation. En effet, pour un même jeu de paramètres d’entrée, les sorties du programme de simulation sont toujours identiques. On considère donc que leur variabilité est nulle. Pourtant, lors des variations de paramètres, des variations d’erreur de méthode, telles que celles introduites par les remaillages, existent et mériteraient une attention particulière. Nous n’aborderons pas cet aspect dans ce chapitre. Remarquons tout de même qu’en privilégiant une grande excursion des paramètres la méthode a pour effet de minimiser l’influence de ces variations.
6 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
16.1.5. L’analyse de sensibilité, un "plus" accessible par la simulation.
La démarche des plans d’expériences numériques transpose la méthode des plans d’expériences classique. C’est-à-dire que pour chaque combinaison des paramètres d’entrée, la méthode attend une réponse du dispositif. En fait, la modélisation numérique peut apporter beaucoup plus d’informations sur le dispositif que cette simple réponse.
Au prix de quelques traitements mathématiques puis numériques additionnels, la simulation numérique peut apporter la sensibilité de la réponse par rapport aux paramètres d’entrée. Les méthodes d’optimisation déterministes puissantes, exploitant la réponse et son gradient, deviennent alors utilisables.
Cette démarche est d’ailleurs généralisable puisque les dérivées d’ordre élevé sont également atteignables. Cela conduit alors au développement de Taylor de la réponse en fonction des paramètres [SAL 98], ce qui est une autre façon de construire une surface de réponse.
16.1.6. L’organisation de ce chapitre
Dans ce chapitre, nous allons donc nous intéresser à l’optimisation de structures par simulations numériques. Nous rappellerons succinctement les méthodes numériques d’optimisation déterministes sans contraintes, les méthodes déterministes avec contraintes et les méthodes évolutionnistes. Puis, nous présenterons la méthode des plans d’expériences numériques et quelques surfaces de réponses usuelles bien adaptées à l’optimisation. Ensuite, nous présenterons les principes de l’analyse de sensibilité dans le contexte de la simulation numérique. Enfin, nous terminerons par un exemple concret sur lequel nous expliciterons l’ensemble de la démarche d’optimisation développée dans ce chapitre.
16.2. Les méthodes d’optimisations

Optimisation (Jean-Louis COULOMB) 7
16.2.1. Les problèmes d’optimisation, quelques définitions.
Un problème d’optimisation de dimension n peut être écrit de façon générale sous la forme :
– minimiser
),...,,()( 21 nxxxfxf = avec nnxxxx ℜ∈= ,...,, 21 [16.1]
– en respectant
( )( )
njxxx
mmixG
mixG
jjj
ei
ei
,...,1
,...,10
,...,10
maxmin =≤≤
+=≤==
[16.2]
où – la quantité f(x) est le critère à minimiser, appelé aussi fonction objectif ; – le vecteur x est constitué de n variables xj qui représentent les paramètres du
problème ; – les fonctions Gi(x) représentent les contraintes d’égalité et d’inégalité ; – les valeursmin
jx et maxjx désignent les contraintes de domaine.

8 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Domaine admissible
Domaine interdit
g1g2
g3 g4
x1
x2
Figure 16.1. Domaine admissible et domaine interdit.
f
x
Minima locaux
Minimum global
Figure 16.2. Représentation des minima locaux et du minimum global d’une fonction.
L’espace de recherche est borné par les contraintes de domaine portant directement sur les variables de conception. Les contraintes d’égalité et d’inégalité séparent cet espace, en un domaine admissible, dans lequel toutes les contraintes sont respectées, et un domaine interdit, le reste (figure 16.1).

Optimisation (Jean-Louis COULOMB) 9
Une fonction objectif peut posséder plusieurs minima locaux. Le plus petit de ces minima est le minimum global. Lorsqu’une fonction ne contient qu’un minimum local, elle est dite unimodale. Dans le cas contraire elle est dénommée multimodale.
Nous avons défini le problème d’optimisation comme étant la minimisation d’une fonction. Cependant, il existe des situations où nous sommes plutôt intéressés à trouver un point de maximisation, c’est-à-dire, à maximiser la fonction objectif. Dans ce cas, il convient de transformer le problème de maximisation en minimisation car les méthodes d’optimisation qui seront présentées ci-dessous sont souvent implantées en s’appuyant sur des critères de minimisation de la fonction objectif. La plus simple des transformations est :
( ) )()( xfxf −=Φ [16.3]
Pour pouvoir comparer les variables de conception, notamment au niveau des critères d’arrêt des algorithmes d’optimisation, elles sont normalisées. L’usage est de retenir comme nouvel intervalle, soit [0,+1], soit [-1,+1]. Les variables normaliséesjx s’obtiennent grâce à des transformations simples du type :
min,
max,
min,,
rjrj
rjrjj
xx
xxx
−
−= ou bien 12
min,
max,
min,, −
−
−=
rjrj
rjrjj
xx
xxx [16.4]
dans lesquelles rjx , est une variable réelle, min,rjx sa borne inférieure et max
,rjx sa borne
supérieure.
16.2.2. Problèmes d’optimisation non contraints.
Un problème d’optimisation est dit non contraint s’il ne contient pas de fonctions contraintes. Sa résolution peut être effectuée par application de différentes méthodes qui se divisent en deux grandes familles, les méthodes déterministes (méthode des gradients, méthodes quasi-Newton, …) et les méthodes non déterministes ou stochastiques (méthodes Monte Carlo, algorithmes évolutionnistes, …).

10 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Les méthodes déterministes possèdent les propriétés suivantes : – A contexte initial donné, elles conduisent toujours à la même solution finale ; – Elles nécessitent relativement peu d’évaluations de la fonction objectif ; – Mais elles peuvent se bloquer sur un optimum local.
A contrario, les méthodes non déterministes ont les caractéristiques suivantes : – A contexte initial donné, elles peuvent conduire à des solutions différentes ; – Elles nécessitent un grand nombre d’évaluations de la fonction objectif; – Elles possèdent la capacité de trouver l’optimum global.
En général, les algorithmes d’optimisation sont itératifs et s’apparentent à une méthode d’essais et d’erreur (figure 16.3). Un algorithme sera caractérisé par les choix faits pour répondre aux deux questions suivantes :
– Comment déterminer si les performances sont acceptables ? – Comment choisir les nouvelles valeurs des paramètres lorsque les performances
ne sont pas acceptables ?
Choix Paramètres
Détermination Performances
Performances Acceptablesnon
oui
?
?
Figure 16.3. Recherche itérative d’une combinaison acceptable des paramètres.
Un algorithme d’optimisation concrétise également un choix entre l’exploration de l’espace, nécessaire à la recherche de l’optimum global, et l’exploitation des résultats obtenus pour réduire le coût de la recherche de l’optimum local.
Par exemple, les méthodes Monte Carlo permettent une bonne exploration de l’espace, puisque tout point a une probabilité identique d’être atteint, mais il n’y a pas d’exploitation des résultats déjà obtenus.

Optimisation (Jean-Louis COULOMB) 11
Avec la méthode des gradients, l’exploration est moindre, mais l’exploitation des données précédentes, par l’intermédiaire des gradients, permet une bonne recherche locale.
On peut considérer que les Algorithmes Évolutionnistes offrent un compromis entre exploration et exploitation.
Pour illustrer ces comportements différents, prenons la fonction [ALO 97]
)20*30)5.0(20*30)5.0((*01.0),( 2424 yyyxxxyxf −−++−−+= [16.5]
qui possède trois minima locaux et un minimum global (figure 16.4). L’optimisation est réalisée, d’une part, par la méthode déterministe BFGS et, d’autre part, à l’aide d’un algorithme génétique.

12 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Figure 16.4. Fonction possédant 3 minima locaux et un minimum global.
N° itération f(x,y) Longueur du pas
Norme gradient
1 0.00125 1 1.17
2 0.00125 3.4641 1.17
3 -1.63 0.866025 3.51
4 -3.45131 0.866025 1.42
5 -3.68237 0.414836 0.393
6 -3.68392 0.0168431 0.00715
7 -3.68392 0.000318346 2.51e-06
Tableau 16.1. Optimisation de la fonction 16.5 par BFGS. Point initial x0=0 y0=0
L’algorithme BFGS a trouvé un optimum local à partir du point initial x0=0, y0=0, alors qu’en partant de x0=-1, y0=-1, il a trouvé l’optimum global. Dans les deux cas, la recherche n’a nécessité que 7 appels à la fonction objectif (tableaux 16.1 et 16.2).

Optimisation (Jean-Louis COULOMB) 13
N° itération f(x,y) Longueur du pas
Norme gradient
1 -0.19875 1 1.98
2 -0.89875 3.16228 39.1
3 -4.77471 0.402529 9.59
4 -5.21756 0.192832 1.51
5 -5.23273 0.0446687 0.0678
6 -5.23276 0.00221215 0.00016
7 -5.23276 5.24066e-06 8.95e-10
Tableau 16.2. Optimisation de la fonction 16.5 par BFGS. Point initial x0=-1 y0=-1.
Génération fmin
1 -3.614688
6 -3.693985
8 -4.340504
12 -4.453080
18 -4.829776
23 -5.230562
41 -5.232669
74 -5.232748
192 -5.232751
200 -5.232751
Tableau 16.3. Optimisation de la fonction 16.5 par algorithme génétique (200 générations de 15 individus).

14 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Pour le paramétrage de l’algorithme génétique, nous avons choisi 200 générations de 15 individus, ce qui est un choix plutôt minimaliste. Le tableau 16.3 montre la progression de la population vers le minimum global. Sur la figure 16.4, les points représentent les meilleurs individus des quelques générations sélectionnées. En comparaison des optimisations déterministes précédentes, cette recherche a nécessité un nombre considérable d’évaluations de la fonction objectif, mais l’optimum global a bien été localisé.
16.2.2.1. Méthodes d’optimisation déterministes.
Selon la dimension de la fonction objectif à optimiser, les méthodes déterministes peuvent être unidimensionnelles ou multidimensionnelles.
Les méthodes déterministes unidimensionnelles sont utilisées dans l’optimisation de fonctions à un seul paramètre. Ces méthodes, aussi appelées méthodes de Recherche Linéaire (Line Search Methods), sont basées sur des techniques qui permettent de localiser le point minimal de la fonction à partir de réductions successives de l’intervalle de recherche. Parmi ces méthodes, citons la méthode de Dichotomie [CUL 94], la méthode du Nombre d’Or [CUL 94], [PRE 92] et la méthode de Brent [BRE 93], [PRE 92].
Les méthodes déterministes multidimensionnelles sont consacrées à l’optimisation de fonction à un paramètre ou plus. Elles peuvent être classées selon l’information sur la fonction qu’elles utilisent. Elles sont dites d’ordre 0, si elles n’utilisent que la valeur de la fonction. Elles sont dites d’ordre 1, si elles nécessitent en plus le gradient de la fonction.
Les méthodes d’ordre 0 sont en général peu précises et convergent très lentement vers l’optimum [KOW 68]. Par contre, elles offrent l’avantage de se passer du calcul du gradient, ce qui peut être très intéressant lorsque la fonction n’est pas

Optimisation (Jean-Louis COULOMB) 15
différentiable ou lorsque le calcul de son gradient est complexe ou représente un coût important.
Les méthodes d’ordre 1 permettent d’accélérer la localisation de l’optimum, car le gradient donne une information sur la direction de recherche de la solution. Par contre, elles ne sont applicables qu’aux problèmes dans lesquels la fonction est continûment différentiable.
Les méthodes multidimensionnelles peuvent être divisées en deux groupes, d’une part, les méthodes analytiques ou de descente, et d’autre part, les méthodes heuristiques ou géométriques.
Les méthodes analytiques se basent sur la connaissance d’une direction de recherche, souvent donnée par le gradient de la fonction. La plupart de ces méthodes sont d’ordre1 et exécutent successivement des recherches linéaires en faisant appel à une méthode unidimensionnelle [PRE 92]. Les exemples les plus significatifs de méthodes analytiques sont la méthode de la Plus Grande Pente [CUL 94], la méthode du Gradient Conjugué [CUL 94], [FLE 87], [PRE 92], la méthode de Powel [POW 65] et les méthodes Quasi-Newton [CUL 94], [FLE 87], [PRE 92].
Les méthodes heuristiques explorent l’espace par essais successifs en recherchant les directions les plus favorables. A l’opposé des méthodes analytiques, la plupart de ces méthodes sont d’ordre 0. Les méthodes les plus utilisées sont la méthode du Simplex [NEL 65], la méthode de Rosenbrock [RAO 96] et la méthode de variations locales de Hooke et Jeeves [CHE 99].
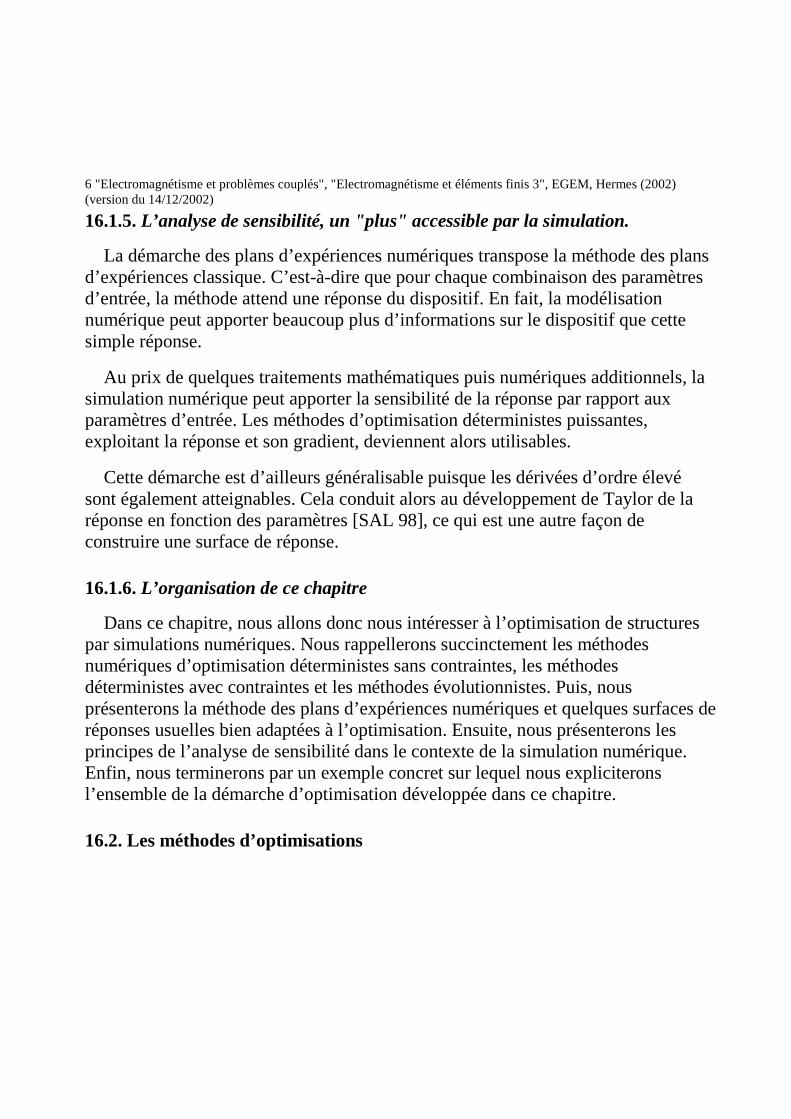
La figure 16.5 montre les méthodes déterministes multidimensionnelles les plus couramment utilisées, avec leur ordre respectif de résolution.
16 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Méthodes DéterministesMultidimensionnelles
Plus GrandePente
(ordre 1)
GradientConjugué(ordre 1)
MéthodesQuasi-Newton
(ordre 1)
Méthodede Powell(ordre 0)
Méthodedu Simplex(ordre 0)
Méthode deRosenbrock
(ordre 0)
Hooke etJeeves
(ordre 0)
MéthodesAnalytiques
MéthodesHeuristiques
Figure 16.5. Quelques méthodes déterministes multidimensionnelles.
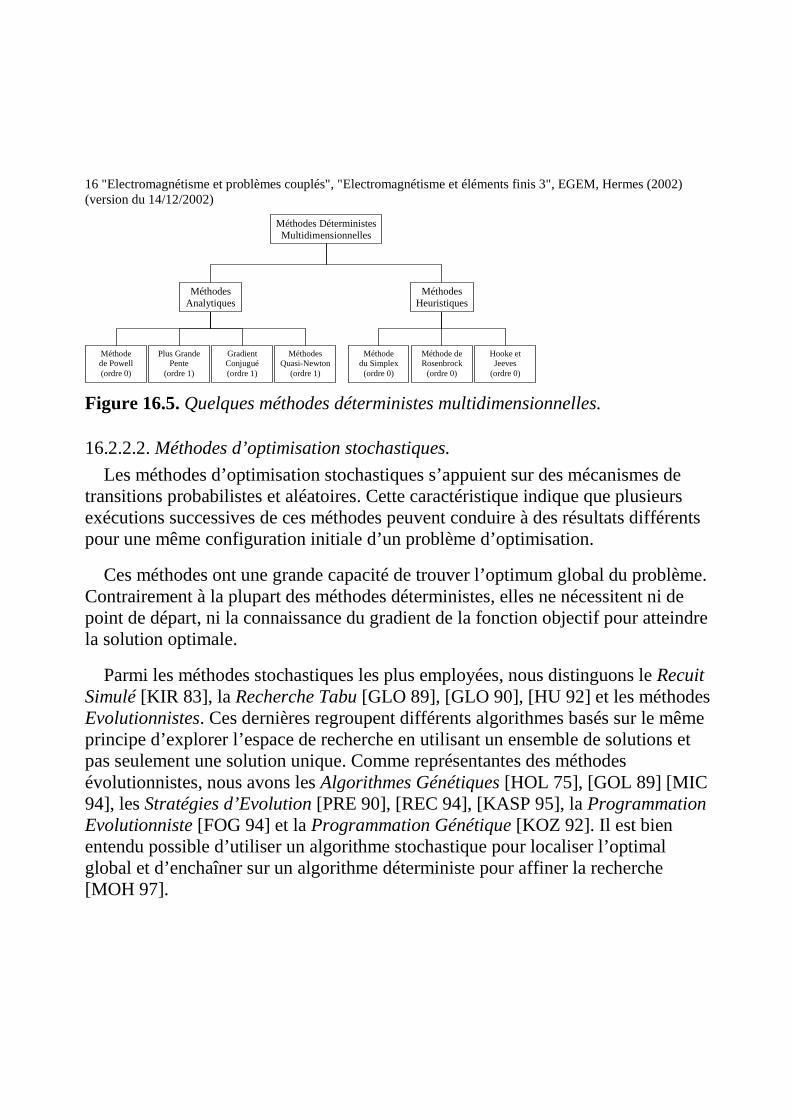
16.2.2.2. Méthodes d’optimisation stochastiques.
Les méthodes d’optimisation stochastiques s’appuient sur des mécanismes de transitions probabilistes et aléatoires. Cette caractéristique indique que plusieurs exécutions successives de ces méthodes peuvent conduire à des résultats différents pour une même configuration initiale d’un problème d’optimisation.
Ces méthodes ont une grande capacité de trouver l’optimum global du problème. Contrairement à la plupart des méthodes déterministes, elles ne nécessitent ni de point de départ, ni la connaissance du gradient de la fonction objectif pour atteindre la solution optimale.
Parmi les méthodes stochastiques les plus employées, nous distinguons le Recuit Simulé [KIR 83], la Recherche Tabu [GLO 89], [GLO 90], [HU 92] et les méthodes Evolutionnistes. Ces dernières regroupent différents algorithmes basés sur le même principe d’explorer l’espace de recherche en utilisant un ensemble de solutions et pas seulement une solution unique. Comme représentantes des méthodes évolutionnistes, nous avons les Algorithmes Génétiques [HOL 75], [GOL 89] [MIC 94], les Stratégies d’Evolution [PRE 90], [REC 94], [KASP 95], la Programmation Evolutionniste [FOG 94] et la Programmation Génétique [KOZ 92]. Il est bien entendu possible d’utiliser un algorithme stochastique pour localiser l’optimal global et d’enchaîner sur un algorithme déterministe pour affiner la recherche [MOH 97].

Optimisation (Jean-Louis COULOMB) 17
Dans le cas de fonctions objectifs multimodales, un optimum local peut s’avérer en définitive plus intéressant que l’optimum global, car il est bien difficile de traduire tous les critères de choix dans une seule fonction objectif. Dans ces circonstances, les algorithmes de nichage [SAR 98a], permettant de déterminer simultanément plusieurs optima, seront bien utiles.
La figure 16.6 présente les méthodes stochastiques les plus utilisées.
MéthodesÉvolutionnistes
MéthodesStochastiques
RecuitSimulé
RechercheTabu
AlgorithmesGénétiques
Stratégiesd’Évolution
ProgrammationÉvolutionniste
ProgrammationGénétique
Figure 16.6. Quelques méthodes stochastiques
16.2.3. Problèmes d’optimisation contraints.
Un problème d’optimisation est dit contraint s’il contient au moins une fonction contrainte dans sa description. L’ensemble des régions de l’espace de recherche où les contraintes de conception sont vérifiées est dénommé espace réalisable ou domaine admissible. Inversement, l’espace irréalisable ou domaine interdit désigne l’ensemble de régions de l’espace où les contraintes sont violées (figure 16.1). L’existence de fonctions contraintes dans un problème d’optimisation demande une attention spéciale à la résolution du problème.
La solution d’un problème contraint est obtenue par l’utilisation de méthodes que l’on peut séparer en deux groupes : les méthodes de Transformation et les méthodes Directes.

18 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
16.2.3.1. Méthodes de transformation.
Les méthodes de transformation, ou indirectes, transforment le problème original avec contraintes en un problème équivalent sans contraintes, en introduisant les contraintes de conception dans la fonction objectif. Une fois que le problème équivalent est créé, un algorithme classique d’optimisation sans contrainte est appliqué.
En fait, une telle transformation brutale conduirait à un problème sans contrainte beaucoup trop raide donc difficile, voire impossible, à résoudre. En pratique, on applique une succession de petites transformations. Chaque transformation intermédiaire transforme le problème original contraint en un sous-problème non contraint qui tend vers le problème non contraint équivalent au problème initial. Sur chacun de ces sous-problèmes, un algorithme d’optimisation sans contrainte est utilisé pour déterminer une solution en partant de la solution précédente. La solution finale est une solution au problème posé.
Parmi les méthodes de transformation les plus utilisées, nous avons les méthodes de Pénalités Intérieures [CAR 61], les méthode de Pénalités Extérieures [FIA 68] la méthode du Lagrangien Augmenté [HES 69], [POW 69], [ROC 73] la méthode des Variables Mixtes et la méthode des Asymptotes Mobiles [MAH 95].
Les méthodes de transformations sont souvent utilisées dans l’optimisation de problèmes contraints, car elles sont assez simples d’un point de vue théorique et d’une efficacité acceptable d’un point de vue pratique, notamment lorsqu’elles sont couplées avec des algorithmes évolutionnistes.
16.2.3.2. Méthodes directes.
Les méthodes directes travaillent directement sur le problème contraint original 16.1 16.2 en résolvant les équations de Kuhn-Tucker associées qui représentent une condition nécessaire pour que *x soit minimum local du problème :

Optimisation (Jean-Louis COULOMB) 19
( )
( ) mixG
xGxf
ii
m
iii
,...,10*
0*.*)(
*
1
*
==
=∇+∇ ∑=
λ
λ [16.6]
La résolution des équations de Kuhn-Ticker sont à la base de plusieurs méthodes directes parmi lesquelles nous signalerons plus particulièrement la méthode de Programmation Quadratique Récursive [FLE 87] qui est d’une grande efficacité.
16.2.4. Optimisation multiobjectif.
Le problème d’optimisation, tel qu’il est posé par les équations 16.1 16.2, est souvent très loin des problèmes concrets rencontrés en pratique. En effet, il est rare qu’une unique fonction objectif, associée à des contraintes, puisse représenter de manière adéquate le problème d’optimisation rencontré. La plupart du temps, c’est un ensemble de fonctions objectifs ( ) ( ) ( ) xFxFxFxF q,...,)( 21= que l’on aura à gérer.
Le problème d’optimisation multiobjectif s’exprime de la manière suivante : – minimiser
( ) ( ) ( ) xFxFxFxF q,...,)( 21= avec nnxxxx ℜ∈= ,...,, 21 [16.7]
– en respectant
( )( )
njxxx
mmixG
mixG
jjj
ei
ei
,...,1
,...,10
,...,10
maxmin =≤≤
+=≤==
[16.8]
Dans ce problème, les composantes du vecteur objectif entrent en compétition et leur importance relative n’est pas toujours connue à l’avance. Il n’y a donc pas de solution unique à ce problème. Pour caractériser les objectifs, c’est le concept de non infériorité ou optimalité de Pareto qui doit être utilisé. Une solution est dite non inférieure si une amélioration d’un objectif entraîne nécessairement une dégradation d’un autre.

20 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
F1
F2
C
D
A
B
F1BF1A
F2A
F2B
Λ
x1
x2
Ω
PAB FF 11 >
AB FF 22 <
Figure 16.7. Image du domaine admissible dans l’espace des fonctions objectifs
La figure 16.7 illustre ce concept. La partie gauche représente le domaine admissible pour les deux variables de conception 1x et 2x d’un problème d’optimisation multiobjectif contraint. La partie de droite montre l’image de ce domaine dans l’espace des fonctions objectifs. Les points intérieurs, tels que P, ne sont pas solutions, car des diminutions à la fois de 1F et de 2F sont possibles dans leur voisinage. Par contre, tous les points de l’arc CD, tels que A et B, sont des solutions au sens de Pareto, car toute amélioration d’un des objectifs se fait au détriment d’un autre.
Une méthode usuelle pour résoudre un problème multiobjectif consiste à le transformer en un problème monoobjectif par sommation pondérée des q objectifs :
( ) )()(1
xFwxFwxf Tq
kkk == ∑
= avec 10 << kw et ∑
==
q
kkw
11 [16.9]
Ce dernier peut alors être résolu par une méthode d’optimisation standard.
D’autres méthodes permettent de résoudre efficacement ce type de problème. Parmi elles nous citerons la méthode du but à atteindre (Goal Attainment Method) [GEM 74]. Dans cette méthode, il faut avoir a priori une idée des valeurs finales de chaque objectif (les buts à atteindre) **
2*
1* ,...,, qFFFF = . Cependant, une certaine
imprécision sur ces valeurs est permise grâce à l’introduction d’un degré de relâchement par but qwwww ,...,, 21= . L’optimisation consiste à minimiser la grandeur
Optimisation (Jean-Louis COULOMB) 21
scalaire γ qui représente la distance au but à atteindre dans la direction w, tout en respectant les contraintes initiales et les contraintes additionnelles
qkFwxF kkk ,...,1)( * =≤− γ
16.3. La méthode des plans d’expériences numériques
16.3.1. Le pilotage direct de l’outil de simulation par un algorithme d’optimisation, principe et inconvénients.
Une approche naturelle du problème d’optimisation des structures électromagnétique consiste à faire piloter directement l’outil de simulation par un algorithme d’optimisation (figure 16.8). Cette façon de faire, simple dans son principe, se heurte à des difficultés liées au coût unitaire de l’évaluation, aux erreurs introduites par la simulation et à la stratégie mise en œuvre par l’algorithme.
Dans la mesure où il est très difficile de connaître à l’avance le nombre d’évaluations qui seront nécessaires à l’algorithme d’optimisation et que le coût unitaire est élevé, le coût global de cette approche n’est pas vraiment maîtrisable a priori.
L’absence de maîtrise du coût n’est d’ailleurs pas le seul et ni le plus important des problèmes lorsque la simulation utilise un maillage de domaines (éléments finis, différences finies, …). Dans ce cadre, il faut bien prendre garde aux effets des changements de paramètres géométriques, car les discontinuités de discrétisation introduisent des "bruits numériques" qui perturbent fortement les algorithmes d’optimisation. Cet effet est d’autant plus marqué que les "pas" de variation des paramètres géométriques sont petits [HOO 91]. Or, la caractéristique des algorithmes d’optimisation classique est d’avancer à petits pas lorsqu’ils se rapprochent de l’optimum !

22 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Algorithmed’optimisation
Fonctionobjectif
x
f(x)
Figure 16.8. Pilotage du simulateur par l’algorithme d’optimisation
On voit donc que dans certains cas, il peut y avoir incompatibilité majeure dans le simple couplage de l’outil de simulation et de l’outil d’optimisation. Il faut alors, soit améliorer l’outil de simulation en neutralisant le bruit numérique (maillage élastique [KAD 93], analyse de sensibilité [GIT 89], développement de Taylor [PET 97], [NGU 99]), soit changer de stratégie d’optimisation.
C’est cette seconde voie que nous nous proposons d’explorer, tout d’abord, en présentant la méthode des plans d’expériences numériques dont le principe de base repose sur la méthode de la surface de réponse.
16.3.2. La surface de réponse, une approximation permettant l’optimisation indirecte.
Une surface de réponse est une approximation de la réponse (la fonction objectif) du dispositif. Elle s’obtient à partir des résultats calculés pour des expériences bien choisies, puis par application d’un algorithme d’interpolation. Elle apporte une connaissance globale du comportement du dispositif. Une surface de réponse sommaire, bien que peu coûteuse, s’avère extrêmement utile dans la détermination des paramètres influents, lors d’une opération de débroussaillage. Les paramètres influents seront alors les seuls à conserver pour la construction d’une surface de réponse plus élaborée (plus coûteuse) utilisable pour la localisation de l’optimum ou des optima (figure 16.9).

Optimisation (Jean-Louis COULOMB) 23
Il faut remarquer que la notion d’approximation est très utilisée par les algorithmes d’optimisation classiques, notamment par les algorithmes déterministes. Ils en font simplement une utilisation localisée. Par exemple, à chaque itération, la recherche du minimum local dans une direction exploite une approximation polynomiale quadratique ou cubique de la fonction, les algorithmes du type quasi-Newton remplacent la fonction objectif par un ellipsoïde …
Algorithmed’optimisation
Surface deréponse
x
fap(x)
Fonctionobjectif
xgrille
f(xgrille)
Beaucoupd’appelsgratuits
Quelquesappelscoûteux
Figure 16.9. Optimisation indirecte grâce à une surface de réponse
Dans la situation qui est a priori la notre, où chaque simulation est chère, c’est la phase de construction de cette surface de réponse qui est coûteuse. Par contre, l’exploitation de cette approximation peut être considérée comme gratuite. Cela ouvre la voie à l’utilisation de toutes sortes d’algorithmes d’optimisation, y compris les plus gourmands en évaluations de la fonction objectif tels que les algorithmes génétiques, pour la recherche de l’optimum global.
Dans notre cas, cette démarche d’optimisation indirecte est avantageuse, – s’il faut moins d’essais pour construire la surface de réponse que pour optimiser
directement, afin de minimiser les coûts ; – si la "distance" entre les points d’essais est relativement grande, afin de
minimiser l’impact des erreurs de méthode.

24 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Une fois que l’optimum est trouvé sur la surface de réponse, il faut vérifier sa validité par une simulation directe. Si l’écart entre estimation et vérification est trop important, on peut affiner l’approximation. Cette démarche est à la base de la construction adaptative d’une surface de réponse [ALL 97].
En fait, la démarche que nous venons d’esquisser (construction d’une surface de réponse simple pour le débroussaillage, construction d’une surface de réponse plus élaborée pour l’optimisation puis optimisation), est inspirée de la méthode des plans d’expériences qui a fait ses preuves dans le domaine expérimental et qui se décline très bien dans le domaine du numérique. Nous allons en décrire les principaux aspects ci-dessous.
16.3.3. La méthode des plans d’expériences, un bref historique.
La méthode des plans d’expériences est issus des travaux de Fisher en recherche agronomique (1925). C’est un domaine ou les expériences sont longues, coûteuses et dont les résultats sont sujets à variabilité. Il fallait une méthode permettant de tirer, d’un nombre d’essais donné, un maximum d’informations crédibles concernant l’influence des facteurs et leur hiérarchisation. Fisher introduisit les bases de l’expérimentation moderne (carré latins, blocs, aléarisation et analyse de la variance).
Plus tard, la méthode a été enrichie (1945-1960) par les statisticiens, Yates, Box, Hunter, … qui introduisirent de nouveaux plans d’expériences : les plans fractionnaires à deux niveaux, les plans composites centrés et les modèles de surface de réponse associés. Ces travaux ont été très utilisés dans l’industrie chimique.
Enfin, une avancée décisive a été réalisée dans le monde industriel grâce à l’approche qualité développée par Taguchi (1960). Il a souligné le besoin de construire la qualité en amont, dès la conception, de concevoir des produits performants en moyenne et peu variable autour de cette moyenne et de rendre les performances moins sensibles aux conditions d’utilisation, aux aléas de fabrication et au vieillissement (conception robuste).

Optimisation (Jean-Louis COULOMB) 25
16.3.4. La méthode des plans d’expériences, un exemple simple.
Nous allons présenter la méthode des plans d’expériences sur un exemple simple du domaine de l’électrochimie, emprunté à P. Ozil [OZI 97] et consistant à étudier le rendement Y d’une réaction chimique. Cette réaction dépend de 3 facteurs X1, X2 et X3 : la température variant entre 100 et 200 °C, la pression variant entre 1 et 2 bars et le catalyseur utilisé qui est soit le produit1, soit le produit2. Les variables normalisées correspondantes x1, x2 et x3, varient toutes entre –1 et +1 (voir tableau 16.4).
L’étude est menée de manière séquentielle en 3 étapes, de manière à minimiser le nombre d’expériences :
– Étape 1 : Estimation de la variabilité de la réponse (le rendement) Y. – Étape 2 : Postulat pour la réponse Y d’un modèle linéaire sans interaction.
– Étape 3 (si l’hypothèse précédente n’est pas vérifiée) : Postulat pour Y d’un modèle linéaire avec toutes interactions.
Facteur
Signification
Niveau – réel
Niveau + réel
Niveau – codé
Niveau + codé
X1 Température (°C)
100 200 x1=-1 x1=+1
X2 Pression (bar)
1 2 x2=-1 x2=+1
X3 Catalyseur Produit1 Produit2 x3=-1 x3=+1
Tableau 16.4. Domaine de variation des facteurs.

26 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
16.3.2.1. Étape 1 : Estimation de la variabilité de la réponse Y.
Classiquement, cette estimation est réalisée par répétition de l’expérience au centre du domaine. Cependant, dans notre cas, le centre n’existe pas car le facteur X3 est un facteur discret.
On choisit donc de répéter 3 expériences avec X1=150°C, X2=1.5 bars, X3=Produit2.
– Les 3 réponses sont Y1=40.3%, Y2=39.8% et Y3=40.9% ;
– La valeur moyenne est [ ]3213
1YYYY ++= =40.33% ;
– La variance est [ ] [ ] [ ]
−+−+−
−=
23
22
2113
1' YYYYYYs =0.55 %.
L’erreur expérimentale est faible, donc une seule expérience par combinaison des facteurs sera suffisante.
On remarque que dans le cas de réponses issues d’expériences parfaitement reproductibles, la variabilité est automatiquement nulle. Nous considérerons donc que les plans d’expériences numériques sont dispensés de répétitions.
16.3.2.2. Étape 2 : Postulat pour la réponse Y d’un modèle linéaire sans interaction.
Le modèle linéaire à 3 variables normalisées et sans interaction a pour expression
3322110 xaxaxaaY +++= [16.10]
Ce modèle repose sur 4 coefficients inconnus (la moyenne a0 et les coefficients propres des facteurs normalisés a1, a2, a3) dont l’identification nécessite au moins 4 essais. La méthode des plans d’expériences, suggère de choisir les 4 essais dont les combinaisons des facteurs sont données dans le tableau 16.5. Ce tableau rapporte également les réponses mesurées au cours de chacune de ces expériences

Optimisation (Jean-Louis COULOMB) 27
N° essai
Facteur X1 (°C)
Facteur X2 (bar)
Facteur X3
Réponse Y (%)
1 200 2 Produit2 75
2 100 2 Produit1 56
3 200 1 Produit1 14
4 100 1 Produit2 9
Tableau 16.5. Les quatre essais pour le modèle sans interaction.
+ + +
+ − −
− − +
−+−
Figure 16.10. Positions relatives des 4 essais du plan factoriel fractionnaire.
Concernant la terminologie, on dit que le plan retenu est un plan factoriel fractionnaire à deux niveaux. Il est à deux niveaux car chaque facteur ne prend que 2 valeurs (ici les valeurs extrêmes). Il est fractionnaire, car seules 4 combinaisons des niveaux, parmi les 23=8 possibilités, sont utilisées (figure 16.10). Les 4 essais sont dits orthogonaux, car, pour un facteur à un niveau donné, les deux niveaux des autres facteurs ont les mêmes nombres de représentants.
L’identification donne, pour la réponse Y, l’expression suivante :
321 5.32765.38 xxxY +++= [16.11]

28 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Pour tester la validité de ce modèle, nous réalisons une cinquième expérience, en prenant une des combinaisons des niveaux extrêmes encore non utilisées (tableau 16.6).
N° essai
Facteur X1 (°C)
Facteur X2 (bar)
Facteur X3
Réponse Y (%)
5 100 1 Produit1 10
Tableau 16.6. L’essai supplémentaire pour tester la validité du modèle linéaire sans interaction.
En introduisant les valeurs des facteurs normalisés dans le modèle (x1=-1, x2=-1, x3=-1), nous obtenons Yprédit=2% qui est très différent de Yexp=10%. Cela signifie que le modèle linéaire sans interaction ne rend pas du tout compte de la réponse de la réaction. Il faut changer de modèle. La méthode des plans d’expériences propose alors de prendre un modèle linéaire avec interactions, ce qui fera l’objet de l’étape suivante.
16.3.2.3. Étape 3 : Postulat, pour la réponse Y, d’un modèle linéaire avec interactions.
Le modèle linéaire avec interactions a pour expression
321123322331132112
3322110
xxxaxxaxxaxxa
xaxaxaaY
+++++++= [16.12]
Dans ce modèle, il y a 8 coefficients inconnus (la moyenne, les coefficients propres et les coefficients d’interaction). Il faut donc au minimum 8 essais. La méthode des plans d’expériences suggère de prendre le plan factoriel complet à deux niveaux (23=8) qui complète le plan factoriel fractionnaire initial (figure 16.11). Dans la mesure où 5 essais de ce plan sont déjà disponibles (4 du modèle précédent, plus 1 du test), il ne nous reste seulement que 3 expériences

Optimisation (Jean-Louis COULOMB) 29
supplémentaires à réaliser (voir tableau 16.7). Remarquons que cette économie de moyen dans la séquentialité des étapes fait partie des préoccupations de la méthode.
L’identification du modèle donne pour la réponse l’expression suivante :
321323121
321
13.063.213.538.1
13.288.2163.863.38
xxxxxxxxx
xxxY
−−+++++= [16.13]
La valeur absolue d’un coefficient mesure l’impact de l’effet linéaire ou de l’interaction dans le modèle. L’interaction X1X2X3 étant négligeable, nous l’éliminons. Le modèle qui ressort de cette étape est donc le suivant :
323121
321
63.213.538.1
13.288.2163.863.38
xxxxxx
xxxY
−+++++= [16.14]
Ce modèle doit être mis à l’épreuve sur au moins un essai. L’essai de variabilité initial de l’étude est parfaitement indiqué, car sa position centrale permet de détecter l’éventuelle non-linéarité de la réponse.

30 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
N° essai
Facteur X1 (°C)
Facteur X2 (bar)
Facteur X3
Réponse Y (%)
6 200 2 Produit1 66
7 200 1 Produit2 34
8 100 2 Produit2 45
Tableau 16.7. Les trois essais supplémentaires pour le modèle linéaire avec interactions.
Figure 16.11. Positions relatives des 8 essais du plan factoriel complet.
L’introduction de la combinaison x1=0, x2=0 et x3=+1, dans le modèle précédent, donne Y=40.76%. Ce qui est très proche de la moyenne Y=40.33% trouvée expérimentalement. Nous considérerons que ce modèle est acceptable et qu’il peut être utilisable en prédiction. L’équation 16.14 est donc la surface de réponse que nous retiendrons.
Remarquons bien que, dans tout ce qui précède, nous avons ignoré la validation statistique qui est un élément extrêmement important de la méthode, mais que nous ignorons dans le cadre de cette présentation des plans d’expériences numériques.
16.3.2.4. La démarche des plans d’expériences.
Nous venons d’illustrer sur un exemple simple la démarche proposée par la méthode des plans d’expériences. Voici un résumé des étapes qui la caractérisent :

Optimisation (Jean-Louis COULOMB) 31
– Définir les N facteurs et la région expérimentale d’intérêt. – Définir les variables codées associées aux facteurs variables. – Postuler un modèle linéaire sans interaction.
- Réaliser les expériences. - Déterminer le modèle linéaire sans interaction - Valider le modèle (combinaison non utilisée des niveaux + -) (au besoin, essais des transformations Yp, Log(Y), arcsin(Y),…). - Exploitation du modèle linéaire sans interaction.
– Postuler un modèle linéaire avec interactions (si modèle précédent non valide) - Réaliser les expériences. - Déterminer le modèle linéaire avec interactions - Valider le modèle (centre du domaine) (au besoin, essais des transformations Yp, Log(Y), arcsin(Y),…). - Exploitation du modèle linéaire avec interaction.
– Postuler un modèle du 2ème degré (si modèle précédent non valide) - …
Les transformations (Yp, Log(Y), arcsin(Y),…), éventuellement utilisées lors des étapes de validation lorsque le modèle n’est pas valide, réalisent des contractions ou des dilatations d’échelles de réponse. En effet, avant de postuler un modèle plus complexe, il est judicieux de tenter d’appliquer un modèle simple sur une réponse transformée. Ces transformations ont aussi pour effet de stabiliser la variance de la réponse dans le cas où une variabilité existerait.
16.3.2.5. Les plans factoriels fractionnaires.
Un des principaux soucis de la méthode des plans d’expériences est d’obtenir le maximum d’information à partir d’un nombre minimal d’essais. De ce point de vue, les plans factoriels fractionnaires représentent un outil fondamental dans la méthode. Afin de mieux en comprendre les performances et les limitations, nous allons utiliser un deuxième exemple.
Dans cette nouvelle application des plans d’expériences, la réponse qui nous intéresse dépend de 4 facteurs. Mais, ici, grâce à une bonne connaissance du fonctionnement du dispositif, nous savons a priori que seules les interactions X1X3, X2X3 et X3X4 sont présentes. Nous postulerons donc pour la réponse, un modèle
32 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
linéaire avec interactions comportant seulement 8 coefficients, au lieu des 16 du modèle linéaire complet :
433432233113443322110 xxaxxaxxaxaxaxaxaaY +++++++= [16.15]
Si nous mettions en œuvre un plan factoriel 24, il nous faudrait procéder à 16 expériences, alors que 8 suffiraient ! D’où l’idée de ne prendre qu’un sous-ensemble du plan factoriel 24. Mais attention, il ne faut pas choisir n’importe quel sous-ensemble, car, pour tirer la meilleure précision possible du petit nombre d’expériences réalisées, il faut respecter l’orthogonalité entre facteurs. Le mieux est donc d’utiliser les tables qui donnent les bons plans d’expériences en fonction du nombre de facteurs et du nombre d’expériences souhaité [BOX 78], [TAG 87].
Cependant, le gain obtenu par le choix d’un plan fractionnaire, ici 8 expériences au lieu de 16, a une contrepartie, car l’identification ne donne pas vraiment des effets (a1, a13, …), mais des sommes d’effets (a1+a234, a13+a24, …) appelées contrastes (on dit que a1 est un alias de a234, …) qui dépendent du plan choisi. Cela introduit des confusions qui dépendent du plan et de l’ordre des facteurs dans ce plan. Le modèle obtenu ne sera donc valable que si les effets négligés sont vraiment négligeables.
Remarquons que dans les ouvrages traitant des plans d’expériences, l’usage n’est pas de désigner les effets des variables, les interactions et les contrastes par des coefficients a1, a13, …, a1+a234, a13+a24, …, mais plutôt directement par les symboles des variables X1, X1.X3, …, X1+X2.X3.X4, X1.X3+X2.X4, …
En conclusion, nous remarquons qu’en utilisant son savoir faire, l’expérimentateur a pu faire la part entre les effets négligeables (a234=a24=…=0) et les effets attendus (a1, a13, …) dans les contrastes calculés. Cela se concrétise par un gain extrêmement important en terme d’expériences à réaliser. Bien entendu, la validité du modèle obtenu dépend de la validité de l’hypothèse sur laquelle il repose.

Optimisation (Jean-Louis COULOMB) 33
16.3.2.6. Conclusion sur les plans d’expériences.
Les plans d’expériences sont pour l’expérimentateur un moyen très efficace : – De déterminer les facteurs influents d’un système (débroussaillage, ou criblage,
ou screening). – De prédire les réponses d’un système (surface de réponse). – D’optimiser un système (surface de réponse au moins du 2ème degré).
L’analyse de la variabilité des réponses (non présentée dans cette introduction) permet :
– De construire la qualité en amont, dès la conception. – De concevoir des produits performants en moyenne et peu variable autour de
cette moyenne – De rendre les performances moins sensibles aux conditions d’utilisation, aux
aléas de fabrication et au vieillissement (conception robuste).
Pour le dimensionnement numérique nous retiendrons, en les adaptant : – La méthode du débroussaillage pour éliminer avant optimisation les facteurs
non influents. – La méthode de surface de réponse en remplacement du calcul direct à la
fonction objectif.
16.4. Les surfaces de réponses
16.4.1. Les surfaces de réponses, leurs principes de base.
Dans la présentation de la méthode des plans d’expériences nous avons déjà rencontré deux familles de surface de réponse : les polynômes du 1er degré sans interaction et les polynômes du 1er degré avec interactions. Les polynômes du second degré sont également couramment utilisés. Les fonctions polynomiales ne sont d’ailleurs pas les seules utilisables. On trouve dans la littérature d’autres types d’approximations basées, par exemple, sur les fonctions radiales [ALO 97] ou sur les éléments diffus [COS 01].
34 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
La forme générale de ces fonctions d’approximation est la suivante :
∑=
=M
jnjjapp xxxaY
121 ),...,,(ϕ [16.16]
Les fonctions de base ),...,,( 21 nj xxxϕ indépendantes étant choisies, leur pondération
ja reste à déterminer par les moindres carrés, c’est-à-dire par minimisation de e la
somme des carrés des écarts entre les K réponses expérimentales et le modèle choisi :
( ) ( )[ ]∑=
−=K
kkappkkn YYwaaae
1
221 ,...,, [16.17]
Les poids kw , connus a priori, servent à exprimer l’importance relative de chacune des expériences. Par exemple, les approximations polynomiales du second degré accordent un poids plus important à la valeur centrale.
Pour déterminer les coefficients de pondération, il faut disposer d’au moins autant d’évaluations de la réponse que de coefficients inconnus. De plus, quelques évaluations supplémentaires sont nécessaires pour tester la validité de la surface de réponse.
Il est commode de ne faire intervenir que des fonctions de base, relativement lisses, dont les valeurs varient entre –1 et +1. Ainsi, le module de leur coefficient de pondération mesure leur impact dans la sommation. Si l’impact est relativement très faible, la fonction de base peut être éliminée. Si la fonction de base éliminée est l’unique représentation d’un facteur ou d’une interaction entre facteur, c’est l’indice que ce facteur ou cette interaction n’a probablement que peu d’influence sur la réponse. Cette constatation est à la base du débroussaillage de la méthode des plans d’expériences dont le but est la sélection des paramètres influents.

Optimisation (Jean-Louis COULOMB) 35
16.4.2. Surfaces polynomiales de degré 1 sans interaction, simples mais parfois utiles.
Les surfaces de réponses polynomiales de degré 1 sans interaction sont des plus simples. Leur forme est la suivante :
∑=
+=n
iii xaaxf
10)( [16.18]
Il y a 1+n coefficients à déterminer. La méthode des plans d’expériences propose de les déterminer au moyen des plans factoriels fractionnaires [SCH 98].
Ce type d’approximation, quoique sommaire peut-être utile dans une phase de débroussaillage lorsque le nombre de facteurs est très important et que les expériences sont très coûteuses.
16.4.3. Surfaces polynomiales de degré 1 avec interactions, bien utiles pour le screening.
Les surfaces de réponses polynomiales de degré 1 avec interactions ont la forme suivante :
∑ ∑∑−
= +==++=
1
1 110)(
n
i
n
ijjiij
n
iii xxaxaaxf [16.19]
Il y a 2
)1.(1
++ nn coefficients à déterminer. La méthode des plans d’expériences
propose de les déterminer au moyen des plans factoriels fractionnaires à deux niveaux [SCH 98]. Il faut bien remarquer ici l’intérêt des plans fractionnaires qui
s’ajustent à la demande en 2
)1.(1
++ nn points expérimentaux, par rapport aux plans
factoriels complets à deux niveaux dont le nombre d’expériences varie en 2n. Par exemple, pour un dispositif comportant n=10 facteurs, le nombre de coefficients à
déterminer est 2
)1.(1
++ nn =56, un plan fractionnaire adapté proposera de réaliser 64
expériences, alors que le plan complet en nécessiterait 2n=210=2048.
36 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
16.4.4. Surfaces polynomiales de degré 2, une première approche pour les non-linéarités.
Les surfaces de réponses polynomiales de degré 2 ont la forme suivante :
∑∑ ∑∑=
−
= +==+++=
n
iiii
n
i
n
ijjiij
n
iii xaxxaxaaxf
1
21
1 110)( [16.20]
Il y a 2
)3.(1
++ nn coefficients à déterminer, mais ici, les plans d’expériences à deux
niveaux ne sont pas adaptés aux variations quadratiques. Pour s’en convaincre, prenons simplement une surface avec un seul facteur, 2
111110)( xaxaaxf ++= , les deux essais en x1=−1 et x1=+1 ne suffisent pas pour la détermination des 3 coefficients !
Les plans factoriels 3n (à trois niveaux) pourraient être une solution, mais ils sont vraiment trop redondants (donc trop coûteux) au-delà de 3 facteurs, comme le montre le tableau 16.8.
Nombre de facteurs n 2 3 4 5 6
Nombre de termes du modèle du 2ème degré
6 10 15 21 28
Nombre d’expériences du plan 3n
9 27 81 243 729
Tableau 16.8. Nombres de termes du modèle du 2ème degré et du plan 3n en fonction du nombre de facteurs.
Lorsque tous les facteurs d’une étude sont continus, les plans composites centrés de Box et Wilson sont beaucoup plus économiques, comme le montre le tableau 16.9.
Optimisation (Jean-Louis COULOMB) 37
Nombre de facteurs n
2 3 4 5 6
Nombre d’expériences du plan composite centré (pour 1 seul point au centre)
9 15 25 27 45
= Plan factoriel 2n ou 2n-1 + 2n points sur les axes + Nc points au centre
cn Nn ++ 22 c
n Nn ++− 22 1
Tableau 16.9. Nombres d’expériences du plan composite centré en fonction du nombre de facteurs.
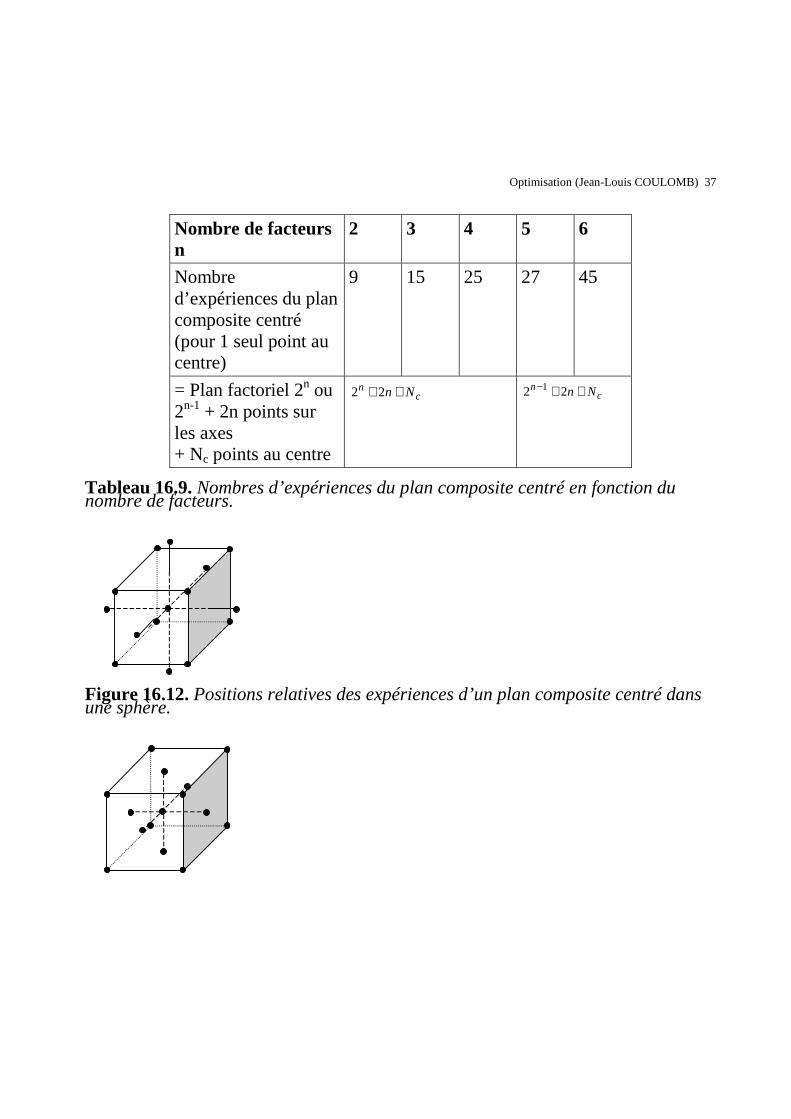
Figure 16.12. Positions relatives des expériences d’un plan composite centré dans une sphère.

38 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Figure 16.13. Positions relatives des expériences d’un plan composite centré dans un cube.
La figure 16.12 présente la disposition relative des expériences proposées dans un plan composite centré dans une sphère. Pour chaque facteur normalisé, on trouve 5 niveaux (-α, -1, 0, +1, +α), ce qui offre un bon compromis, pour les expériences, entre quasi-orthogonalité, isovariance par rotation et précision uniforme. La valeur de α et de Nc dépendent du nombre de facteurs. Par exemple pour n=3, on prendra α=1.682 et Nc=6.
La figure 16.13 montre les essais proposés par un plan composite centré dans un cube, dont la mise en œuvre est plus simple car ne comportant que 3 niveaux (-1, 0, +1).
16.4.5. Les surfaces de réponse du 1er et du 2ème degré, intérêts et limites.
Les surfaces de réponses du 1er et du 2ème degré sont intéressantes car, quoique simples, elles permettent l’examen des principaux effets des facteurs et de leurs interactions. Cette propriété est très utile pour exclure les facteurs les moins significatifs avant l’optimisation.
Cependant, elles sont dans l’impossibilité de rendre bien compte de réponses complexes et notamment des réponses multimodales, c’est-à-dire ayant plusieurs optima, telle que la fonction représentée sur la figure 16.4.
Pour dépasser cette limitation, il est possible d’utiliser des surfaces de réponse polynomiales de degrés supérieurs à 2 [SCH 98] ou bien de nouvelles fonctions, telles que les surfaces de réponse par combinaison de fonctions radiales ou les approximations par éléments diffus, comme nous allons le découvrir ci-dessous.

Optimisation (Jean-Louis COULOMB) 39
16.4.6. Surfaces de réponse par combinaison de fonctions radiales.
Pour permettre la construction, aussi bien de surfaces unimodales, que de surfaces multimodales, Alotto propose, sous l’appellation de surface de réponse générale, d’utiliser une combinaison de fonctions de base radiales [ALO 97] :
∑=
−=M
jjj pxhaxf
1)()( [16.21]
où les pj sont les centres des fonctions de base radiale qui correspondent aux points d’expérimentation. Un choix possible pour ces fonctions est:
spxpxh jj +−=−2
)( [16.22]
où s est un paramètre de réglage de la courbure de la surface de dimension n.
En chacun des M points d’expérimentation, l’interpolation 16.21 doit être égale au résultat à interpoler. Cela conduit à un système matriciel plein, dont les inconnues sont les M coefficients aj, qui possède une solution unique, si les points d’expérimentation sont tous distincts.
A la différence d’une surface de réponse polynomiale classique, les coefficients aj de la surface de réponse générale ne donne pas d’information sur l’influence relative de tel ou tel facteur. Par contre, ce type de construction n’implique pas de position particulière des points d’expérimentation. Il est donc facile d’imposer une concentration, soit globalement sur une grille régulière, soit localement dans les zones où la fonction originale semble plus perturbée.
16.4.7. Surfaces de réponse par éléments diffus.
La méthode des éléments diffus fait partie d’une famille de méthodes numériques appelées méthodes sans maillage (Meshless Methods) dont le but est de créer une approximation discrète de grandeurs continues dans un domaine d’étude [NAY 91], [HER 99], [COS 02].

40 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Cette approximation est obtenue à partir d’une discrétisation du domaine, reposant sur un nuage de points appelés nœuds, sur lesquels on calcule les valeurs des variables d’état dénommées valeurs nodales. Chaque nœud représente le centre d’un élément dont la forme est usuellement une boule de rayon r représentant sa zone d’influence, comme nous le montre la figure 16.14.
Élément Diffus
Nœud
r
Figure 16.14. Représentation des éléments diffus.
À la différence des fonctions de base radiales vues précédemment dont la portée s’étend dans tout le domaine, les fonctions utilisées dans l’approximation diffuse ont une influence uniquement dans la boule de rayon r. Au-delà, la fonction est uniformément nulle, ce qui confère à cette approximation une portée ajustable. Le rayon de chaque boule peut être choisi arbitrairement, à la seule condition que le domaine soit entièrement recouvert et que le nombre de nœuds englobés par chaque boule soit supérieur ou égal au nombre de coefficients intervenant dans l’approximation (1 pour une approximation d’ordre 0, 1+n pour une approximation d’ordre 1 sur n variables, …). Dans le cas d’éléments créés sur une grille régulière, dont le pas inter nodal d est le même dans les n directions, la valeur minimale du rayon assurant le recouvrement est de :
2
.min
ndr = [16.23]
À titre d’illustration, la figure 16.15 compare la fonction unidimensionnelle :

Optimisation (Jean-Louis COULOMB) 41
)2030)5.0((*01.0)( 24 xxxxf −−+= [16.24]
sur l’intervalle [-7, +6], avec ses approximations diffuses d’ordre 0, 1 et 2 définies à partir de 7 points d’évaluations.
-3,0
-2,0
-1,0
0,0
1,0
2,0
3,0
4,0
5,0
6,0
-7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6
x
f(x)
fonction réelle ordre 0 ordre 1 ordre 2
Point d'évaluation
Figure 16.15. Comparaison entre différents ordres d’approximation.
Nous constatons que l’approximation d’ordre 2 donne un meilleur résultat par rapport aux autres ordres. Cependant, lorsque le nombre de paramètres n de la fonction augmente, le nombre minimal de nœud
2
)3.(1
++ nn que les éléments doivent
contenir peut devenir assez important. Pour garantir ce nombre minimal de nœuds englobés, le rayon des éléments doit être suffisamment grand, ce qui compromet le caractère local de l’approximation. Les ordres 0 et 1 sont alors généralement préférés.
16.4.8. Surfaces de réponse adaptatives.
Le nombre de nœuds utilisés dans une surface de réponse à base de fonctions radiales ou d’éléments diffus est sans aucun doute le facteur le plus influent dans la qualité de l’approximation. L’utilisation d’une discrétisation importante à K niveaux

42 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
dans chaque direction du domaine, conduit à une approximation de meilleure qualité. Cependant, lorsque le nombre n de paramètres de la fonction augmente, le nombre d’évaluations du plan factoriel complet croît suivant la loi Kn, ce qui conduit rapidement à un coût prohibitif. Par exemple 7 niveaux pour 5 paramètres, nécessitent 75=16807 évaluations.
Nous pouvons limiter le nombre de nœuds créés pour la construction de l’approximation et en même temps assurer sa qualité, en utilisant un algorithme adaptatif qui demande l’ajout de nouveaux points d’évaluation seulement dans certaines régions du domaine. De tels algorithmes qui fournissent une surface de réponse adaptative peuvent être trouvés dans [ALO 97], [HAM 99], [COS 02]. Le placement de nouveaux points peut s’inspirer des plans factoriels fractionnaires ou utiliser directement un critère D-optimal [VIV 01].
16.5. Analyse de sensibilité
Les méthodes d’optimisation déterministe les plus efficaces utilisent, non seulement la connaissance de la valeur de la fonction objectif pour un état des paramètres, mais également la valeur de son gradient. Plusieurs approches sont disponibles pour obtenir la valeur numérique de ces dérivées premières.
16.5.1. La méthode des différences finies.
La méthode des différences finies est la plus populaire des méthodes permettant d’obtenir une approximation d’une dérivée. Si f(p) est une fonction du paramètre scalaire p, une approximation de sa dérivée première s’obtient par :
p
pfppf
p
f
dp
df
∆−∆+=
∆∆≈ )()( [16.25]
Cette approche est simple et générale. Cependant, elle induit une erreur numérique si le pas ∆p est trop petit (différence de deux nombres proches entachés d’erreur) et une erreur de méthode si ∆p est trop grand (termes négligés dans le développement de Taylor). Un compromis pour le pas ∆p est donné par [GIL 83] :

Optimisation (Jean-Louis COULOMB) 43
)(2
" pfp num
optε=∆ [16.26]
où f"(p) est une approximation de la dérivée seconde de f et εnum est une évaluation de l’erreur commise lors d’un calcul de f. Cette erreur comporte une part aléatoire, due aux erreurs de calcul élémentaire, et une erreur de méthode systématique. Lorsqu’une discrétisation intervient, ce qui est le cas pour la méthode des éléments finis, il est essentiel de ne pas modifier sa topologie entre les deux essais. Pour cela, lorsque le paramètre p influe sur la forme du domaine, on pourra utiliser les notions de milieu déformable [HOO 91] ou de maillage élastique [KAD 93] ou d’interpolation [RAM 97].
Remarquons que pour l’évaluation de n dérivées partielles de f, cette procédure requiert n+1 évaluations de f dans la version décentrée précédente, et 2n calculs dans une version centrée plus précise.
16.5.2. La méthode de dérivation locale de la matrice jacobienne.
La méthode des différences finies vue précédemment est très facile à mettre en œuvre, puisqu’elle ne requiert que la mise en place du calcul de f comme fonction des paramètres. Cependant, elle nécessite plusieurs évaluations de la fonction pour chaque calcul de gradient et est sujette à des erreurs importantes dans le cas où la variation de paramètre induit des variations de topologie numérique.
Une alternative séduisante pour le calcul des dérivées partielles de f, consiste à les calculer explicitement. Cette approche est particulièrement utile pour les paramètres de forme p qui influent sur un maillage. Le principe repose sur la dérivation locale de la matrice jacobienne, initialement développée pour le calcul de forces, couples et raideurs électromagnétiques [COU 83], puis étendu au calcul de sensibilité [GIT 89], [PAR 94]. Nous allons en présenter le principe.

44 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Considérons une fonction f(p) résultant d’une intégration sur le domaine Ω, découpé en éléments finis Ωe et dont la forme peut dépendre de p :
( ) ( )∑ ∫∫ΩΩ
==éléments
e
dxpxgdxpxgpf ,,)( [16.27]
Dans la méthode des éléments finis [ZIE 79], il est classique d’effectuer le changement de variables qui remplace les coordonnées réelles dans l’élément fini Ωe, par les coordonnées locales u dans l’élément de référence ∆e :
( )∑ ∫∆
=éléments
e
Jdupuxgpf det),()( [16.28]
où detJ désigne le déterminant de la matrice jacobienne J de changement de coordonnées pour chaque élément. Si le paramètre p influe sur la forme de l’élément, cette matrice en dépend par l’intermédiaire des nœuds géométriques de l’élément.
Dans l’expression 16.27, la dérivation par rapport à p pose problème lorsque ce paramètre influe sur le domaine d’intégration. Par contre, avec l’expression 16.28, chaque sous-domaine d’intégration spatial est figé une fois pour toute. La dérivation de f par rapport à p s’obtient alors simplement par intégration sur l’élément de référence de la dérivée de l’intégrant. Cette dernière inclut la dérivée du déterminant du jacobien, qui se déterminent à partir des dérivées des nœuds géométriques des éléments, et la dérivée de la fonction g, qui peut être une fonction explicite ou implicite de p.
Fréquemment g fait intervenir le gradient, le rotationnel ou la divergence de la variable d’état. Là encore, le passage dans l’espace des coordonnées de référence permet d’expliciter puis de confiner la dépendance au paramètre de forme de l’opérateur différentiel, dans la seule matrice jacobienne [COU 83], que l’élément fini soit de type nodal, d’arête, de facette ou de volume.

Optimisation (Jean-Louis COULOMB) 45
16.5.3. Sensibilité des variables d’état : La stationnarité des équations d’état.
Dans le contexte qui nous intéresse, la fonction objectif f (par exemple un couple électromagnétique, une induction, …) dépend souvent de la variable d’état A (par exemple le vecteur A constitué des N valeurs nodales du potentiel vecteur) qui dépend elle-même de plusieurs paramètres pi :
nini ppppppAff ,...,,...,),,...,,...,( 11= [16.29]
Les sensibilités de la fonction objectif s’obtiennent par dérivation en chaîne :
iiT
i p
f
dp
dA
A
f
dp
df
∂∂+
∂∂= , pour i=1, …, n [16.30]
Dans cette expression interviennent des dérivées partielles TA
f
∂∂ et
ip
f
∂∂ , qui
peuvent être évaluées par différences finies ou dérivation directe, et les sensibilités de la variable d’état
idp
dA , dont la détermination n’est pas immédiate.
En fait, la variable d’état est, elle-même, solution d’un système de N équations construites par assemblage sur les éléments finis :
0),...,,...,(),...,,...,,( 11 =− nini pppQpppAF [16.31]
Ces équations d’état restant stationnaires quelles que soient les valeurs des pi, nous pouvons en déduire les nouveaux systèmes d’équations suivants :
0=−∂∂+
∂∂
dQdpp
FdA
A
Fi
iT
, pour i=1, …, n [16.32]
Les sensibilités de la variable d’état A par rapport aux paramètres pi s’obtiennent alors par résolution des systèmes linéaires :
iiiT p
F
dp
dQ
dp
dA
A
F
∂∂−=
∂∂ , pour i=1, …, n [16.33]

46 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Remarquons que la matrice TA
F
∂∂ du système matriciel 16.33, donnant la dérivée
idp
dA , est la matrice tangente du système d’équations 16.31 donnant A. Si cette
matrice a déjà été construite pour la résolution de A, le coût de calcul par 16.33, pour chacune des dérivées, se réduit à la construction d’un nouveau second membre et d’une résolution d’un système d’équations linéaires.
Dans les équations 16.33, les dérivées idp
dQ et ip
F
∂∂ , peuvent être construites, soit
par différences finies, soit par dérivation explicite. Dans ce dernier cas, si le paramètre pi est un paramètre de forme, il est judicieux d’utiliser la méthode de la dérivation locale de la matrice jacobienne présentée précédemment.
16.5.4. Sensibilité de la fonction objectif : la méthode de l’état adjoint.
La sensibilité de la fonction objectif par rapport aux paramètres peut être aussi obtenue grâce à la méthode de l’état adjoint [GIT 89]. La procédure consiste à définir et calculer un vecteur d’état adjoint λ tel que :
A
f
A
F T
∂∂=
∂∂ λ [16.34]
Dans 16.30, remplaçons TA
f
∂∂ par la transposé du premier membre précédent :
iiT
T
i p
f
dp
dA
A
F
dp
df
∂∂+
∂∂= λ , pour i=1, …, n [16.35]
En introduisant 16.33 dans 16.35, cela conduit aux expressions des sensibilités :
iii
T
i p
f
p
F
dp
dQ
dp
df
∂∂+
∂∂−= λ , pour i=1, …, n [16.36]

Optimisation (Jean-Louis COULOMB) 47
Cette méthode est très intéressante car elle évite la détermination des sensibilités de la variable d’état
idp
dA et ne nécessite donc qu’une seule résolution du système
linéaire 16.34, quel que soit le nombre de paramètres pi.
16.5.5. Dérivation d’ordre supérieur.
Avec les formules 16.30 ou 16.36, nous pouvons obtenir le gradient d’une fonction par rapport aux paramètres. Le même processus de dérivation peut être appliqué à ce gradient pour donner les dérivées secondes simples et croisées. Une récurrence permet ainsi d’obtenir toutes les dérivées jusqu’à l’ordre souhaité. Remarquons que ce processus récurrent nécessite uniquement des résolutions de systèmes matriciels possédant tous la même matrice qui est la matrice tangente de l’équation d’état 16.31. De ce fait, il est beaucoup moins coûteux que ce que l’on pourrait imaginer à priori.
Muni des valeurs de ces dérivées successives, un développement de Taylor ou de Padé par rapport aux paramètres physiques ou géométriques, peut être construit [GUI 94], [PET 97], [NGU 99]. Ce développement est une surface de réponse permettant d’obtenir, instantanément, une évaluation de la fonction développée, pour une combinaison quelconque des paramètres. Cette surface de réponse est, notamment, utilisable dans une phase d’optimisation [SAL 98].
16.6. Un exemple complet d’optimisation
16.6.1. Le problème d’optimisation.
Les principales étapes développées dans ce chapitre c’est-à-dire le débroussaillage, la construction d’une surface de réponse, l’optimisation et la vérification, vont être illustrées ici sur le problème 25 de la série des cas tests internationaux [TAK 96], [COS 01]. L’objectif de ce problème est d’optimiser la forme d’une matrice de moule utilisée dans la production d’aimants permanents.

48 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
A3
A1
A2
A4
Figure 16.16. Le problème à optimiser (Problem 25 of TEAM Workshop).
La matrice du moule est paramétrée par un cercle intérieur de rayon R1, par une ellipse de rayons L2 et L3 et par une largeur définie par L4. le problème d’optimisation consiste à déterminer les valeurs de R1, L2, L3 et L4 pour obtenir une induction magnétique radiale constante de 0.35T aux 10 points définis sur l’arc de cercle ef (figure 16.16).
La fonction à minimiser est donnée par l’équation suivante :
( ) ( ) ∑=
−+−=10
1
22 sin35.0cos35.0i
iiyiix BBF θθ [16.25]
où le paramètre θi indique la position angulaire et Bxi Byi les composantes de l’induction au point de mesure i.
Nous avons ajouté les 4 paramètres supplémentaires A1, A2, A3 et A4, au problème original. Nous savons que ces paramètres additionnels n’ont aucune influence significative sur la valeur de la fonction objectif. Nous souhaitons simplement mettre à l’épreuve la méthode des plans d’expériences dans l’identification des

Optimisation (Jean-Louis COULOMB) 49
paramètres influents. Les domaines de variation des 8 paramètres sont donnés dans le tableau 16.10.
Paramètre Valeur minimale Valeur maximale
R1 5 9.4
L2 12.6 18
L3 14 45
L4 4 19
A1 170 190
A2 70 90
A3 86 88
A4 9.5 11
Tableau 16.10. Domaines de variation des paramètres.
16.6.2. Détermination des paramètres influents par la méthode des plans d’expériences.
L’application d’un plan factoriel complet à deux niveaux sur notre problème à 8 paramètres nécessiterait 28=256 évaluations de la fonction objectif. Pour identifier les paramètres influents, nous utiliserons un plan fractionnel ne nécessitant que 16 expériences (Taguchi table L16 de [SAD 91]). Les valeurs des paramètres utilisées au cours de chaque expérience sont reproduites dans les lignes du tableau 16.11, ainsi que les valeurs correspondantes de la fonction objectif obtenues par utilisation d’un code éléments finis [FLU 01].
Les contributions des contrastes significatifs, ainsi que leur composition dans un modèle linéaire avec interaction, sont présentées dans la table 16.12. La somme de tous les autres contrastes représente une contribution inférieure à 7% ce qui nous autorise à les supposer tous négligeables.

50 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)

Optimisation (Jean-Louis COULOMB) 51
R1 L2 L3 L4 A1 A2 A3 A4 Fobj
5.0 12.6 14.0 4.0 170.0 70.0 86.0 9.5 0.0522
5.0 12.6 14.0 19.0 170.0 90.0 90.0 11.0 0.0710
5.0 12.6 45.0 4.0 190.0 90.0 90.0 9.5 0.2288
5.0 12.6 45.0 19.0 190.0 70.0 86.0 11.0 0.1712
5.0 18.0 14.0 4.0 190.0 90.0 86.0 11.0 0.1273
5.0 18.0 14.0 19.0 190.0 70.0 90.0 9.5 0.1756
5.0 18.0 45.0 4.0 170.0 70.0 90.0 11.0 0.1665
5.0 18.0 45.0 19.0 170.0 90.0 86.0 9.5 0.2646
9.4 12.6 14.0 4.0 190.0 70.0 90.0 11.0 1.2066
9.4 12.6 14.0 19.0 190.0 90.0 86.0 9.5 0.3466
9.4 12.6 45.0 4.0 170.0 90.0 86.0 11.0 1.1023
9.4 12.6 45.0 19.0 170.0 70.0 90.0 9.5 0.5924
9.4 18.0 14.0 4.0 170.0 90.0 90.0 9.5 0.1230
9.4 18.0 14.0 19.0 170.0 70.0 86.0 11.0 0.004

52 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
0
9.4 18.0 45.0 4.0 190.0 70.0 86.0 9.5 0.0537
9.4 18.0 45.0 19.0 190.0 90.0 90.0 11.0 0.0188
Tableau 16.11. Valeurs des paramètres et de la fonction objectif utilisées pour le débroussaillage.
Contraste
Confusions (*)=interactions d’ordre élevé
Contribution (%)
A R1 + L2.L3.A1 + L3.L4.A3 + (*) 14.91
B L2 + R1.L3.A1 + L3.L4.A2 + (*) 25.02
D L4 + L2.L3.A2 + R1.L3.A3 + (*) 6.23
C R1.L2 + L3.A1 + L4.A4 + A2.A3 + (*)
33.01
D R1.L4 + L3.A3 + L2.A4 + A1.A2 + (*)
8.27
E L2.L4 + L3.A2 + R1.A4 + A1.A3 + (*)
6.10
reste … 6.46
Tableau 16.12. Contributions obtenues par application de la méthode des plans d’expériences.
Durant une opération de screening, les interactions entre 3 facteurs (L2.L3.A1,
L3.L4.A3, …) et plus sont généralement négligées. En suivant cette pratique et compte tenu des résultats obtenus, nous pouvons supposer que seuls les facteurs R1,

Optimisation (Jean-Louis COULOMB) 53
L2 et L4 et les interactions R1.L2, R1.L4 et L2.L4 ont une influence sur la valeur de la fonction objectif. Cela signifie que nous pouvons retenir uniquement R1, L2 et L4 comme paramètres dans le problème d’optimisation. Cela représente une réduction considérable de leur nombre. Pour les autres paramètres, nous choisissons L3=14, A1=180, A2=80, A3=88 et A4=9.5 afin de nous recaler sur les valeurs proposées par le problème international.
16.6.3. Approximation de la fonction objectif par une surface de réponse.
Une fois que les 3 paramètres, R1, L2 et L4, estimés les plus significatifs sont choisis, nous construisons une surface de réponse de la fonction objectif. Dans cet exemple, nous utilisons la plus simple des techniques d’échantillonnage. Elle consiste à calculer les valeurs de la fonction aux nœuds d’une grille construite a priori. Nous choisissons 7 niveaux équidistants dans chaque direction, soit un total de 343 expériences. Au cours de ce balayage nous remarquons que la valeur minimale de la fonction objectif, F=0.00148, est obtenue pour le nœud R1=8.7, L2=17.1, L4=16.5.
Ce jeu de résultats permet de construire une surface de réponse en utilisant une méthode adaptée. Ici, nous retenons la méthode des éléments diffus car elle fournit une surface lisse avec peu d’oscillations. Cette surface peut être utilisée telle qu’elle, comme modèle paramétré de comportement du dispositif ou introduite dans un algorithme d’optimisation.
16.6.4. Recherche de l’optimum sur la surface de réponse.
L’optimisation est effectuée par rapport aux 3 paramètres retenus. Le nombre d’appels à la fonction objectif n’étant plus un problème, puisque nous utilisons la surface de réponse à la place de simulations, nous pouvons choisir un algorithme capable de déterminer l’optimum global. Nous sélectionnons un algorithme génétique avec une population de 30 individus et évoluant sur 300 générations. Le

54 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
minimum de la fonction objectif F=0.000411, est obtenu pour R1=7.1675, L2=14.0804, L4=14.3550.
16.6.5. Vérification de la solution par simulation
La configuration précédente des 3 paramètres correspond au minimum de la surface de réponse. Pour vérifier la qualité de la solution proposée, nous effectuons une simulation de contrôle qui donne pour la fonction objectif la valeur F=0.000215 qui semble satisfaisante.
16.7. Conclusion
Nous venons de présenter les principaux concepts liés à l’optimisation de dispositifs dans lesquels interviennent notamment des phénomènes électromagnétiques. Les méthodes déterministes et évolutionnistes sont les outils numériques disponibles pour automatiser ces optimisations. Lorsque l’évaluation du critère est réalisée au moyen d’outils de calcul coûteux, nous avons vu que la méthode des plans d’expériences numériques permet de détecter les paramètres influents et que la méthode de surface de réponse remplace avantageusement l’appel direct à cet outil de calcul.
De nombreuses références concernant l’optimisation des structures électromagnétiques sont disponibles dans la littérature scientifique. Nous n’avons eu d’ailleurs l’occasion de n’en citer qu’un tout petit nombre dans ce chapitre. Au-delà des applications traditionnelles de l’optimisation, ces algorithmes sont aussi utilisés dans les domaines de la conception topologique [DYC 96], [DYC 97] et dans de nombreux problèmes inverses dans lesquels interviennent les champs électromagnétiques (détection de sources, de corps ferromagnétiques, de fissures, de positions, d’aimantations, …). Ces problèmes sont souvent mal posés et nécessite la mise en œuvre d’une méthode de régularisation de la solution [TIK 76], [HAN 87], [HAN 93], [ALI 95], [TIK 98].

Optimisation (Jean-Louis COULOMB) 55
16.8. A propos de l’auteur
Jean-Louis COULOMB est Professeur des Universités à l’École Nationale Supérieure d’Ingénieurs Électriciens de Grenoble, une composante de l’Institut National Polytechnique de Grenoble, où il enseigne la modélisation numérique, l’analyse numérique et la programmation orientée objet. Il dirige le Laboratoire de Magnétisme du Navire et a été responsable de l’Équipe Modélisation et CAO en Électromagnétisme du Laboratoire d’Électrotechnique de Grenoble. Il est co-auteur des logiciels de calcul de champ par éléments finis FLUX2D et FLUX3D et l’un des fondateurs de la plate-forme éléments finis SALOME (environnement logiciel, en source libre, de liaison CAO/CALCUL pour l’intégration de solveurs, d’algorithmes de maillage et de propriétés physiques).

56 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
Bibliographie
[ALI 95] A LIFANOV O.M., ARTYUKHIN E.A., RUMYANTSEV S.V., Extreme methods for solving ill-posed problems with application heat transfer problems, Begell House, 1995 [ALO 97] ALOTTO P., GAGGERO M., MOLINARI G., NERVI M., A design of experiment and statistical approach to enhance the generalised response surface method in the optimization of multiminima problems, IEEE Transactions on Magnetics, vol. 33, no. 2, pp. 1896-1899, 1997 [BOX 78] BOX G.E.P, HUNTER W.G., HUNTER J.S., Statistics for experimenters, Wiley Interscience, 1978 [BRA 94] BRANDISKI K., PAHNER U., BELMANS R., Optimal design of a segmental PM DC motor using statistical experiment design method in combination with numerical field analysis, ICEM 1994, Paris, France, vol. 3, pp 210-215, September 5-8, 1994 [BRE 73] BRENT R.P., Algorithms for minimization without derivatives, Prentice-Hall, 1973 [CAR 61] CAROLL C.W., The created response technique for optimizating nonlinear restrained systems, Operational Research, no. 9, pp 169-184, 1961 [CHE 99] CHERRUAULT Y., Optmisation : Méthodes locales et globales, Presses Universitaires de France, 1999 [CLA 96] CLAVEL E., SCHANEN J.L., ROUDET J., MARECHAL Y., Influence of an impedance step in interconnection inductance calculation, IEEE Transactions on Magnetics, Vol. 32, No. 3, pp. 824-827, 1996 [COS 01] COSTA M.C., COULOMB J.L., MARECHAL Y., NABETA S.I., An adaptative method applied to the diffuse element approximation in optimization process, IEEE Transactions on Magnetics, Vol. 37, No. 5, pp 3418-3422, 2001

Optimisation (Jean-Louis COULOMB) 57
[COS 02] COSTA M.C., GIURGEA S., COULOMB J.L., MARECHAL Y., DIETRICH A. B., NABETA S.I., Diffuse element method and quadtrees: two 'ingredients' for an adaptive response surface, IEEE Transactions on Magnetics, 2002 [COU 83] COULOMB J.L., A methodology for the determination of global electromecanical quantities from finite element analysis and its application to the evaluation of magnetic forces, torques and stiffness, IEEE Transactions on Magnetics, Vol.19, No.6, pp. 2514-2519, 1983. [CUL 94] CULIOLI J.C., Introduction à l’optimisation, Ellipses, 1994 [DHA 84] DHATT G. J.C., TOUZOT G., Une présentation de la méthode des éléments finis, Editions Laloine, 1984 [DUR 64] DURAND E., Electrostatique T. I, II et III, Masson et Cie, Paris, 1964 [DUR 68] DURAND E., Magnétostatique, Masson et Cie, Paris, 1968 [DYC 96] DYCK D.N., LOWTHER D.A., Automated design of magnetic devices by optimizing material distribution, IEEE Transactions on Magnetics, Vol. 32, No. 3, pp. 1188-1193, 1996 [DYC 97] DYCK D.N., LOWTHER D.A., Composite microstructure of permeable material for the optimized material distribution method of automated design, IEEE Transactions on Magnetics, Vol. 33, No. 2, pp. 1828-1831, 1997 [FIA 68] FIACCO A.V., MCCORMICK G.P., Nonlinear programming sequential unconstrained minimization techniques, John Wiley, New York, 1968 [FIS 35] FISHER R.A., The design of experiments, Oliver and Rod, 1935 [FLE 87] FLETCHER R., Practical methods of optimization, John Wiley & Sons, 1987 [FLU 01] FLUX , Logiciel de calcul de champ électromagnétique : Manuel d’utilisation, Cedrat, Meylan, France, 2001 [FOG 94] FOGEL L.J., Evolutionary programming in perspective : the top-down view, in [ZUR 94], pp. 135-146, 1994 [GEM 74] GEMBICKI F.W., Vector optimization for control with performance and parameter sensitivity indices, Ph.D. Dissertation, Case Western Reserve Univ., Cleveland, Ohio, 1974 [GIL 83] GILL P.E., MURRAY W., SAUNDERS M.A., WRIGHT A.H., Computing forward difference intervals for numerical optimization, Siam J. Sci. Stat. Comput., Vol. 4, pp. 310-321, 1983 [GIT 89] GITOSUSASTRO S., COULOMB J.L., SABONNADIERE J.C., Performance derivative calculations and optimization process, IEEE Transactions on Magnetics, Vol. 25, No. 4, pp. 2834-2839, 1989 [GLO 89] GLOVER F., Tabu Search – Part I, ORSA Journal on Computing, vol. 1, no. 3, pp. 190-206, 1989

58 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
[GLO 90] GLOVER F., Tabu Search – Part II, ORSA Journal on Computing, vol. 2, no. 1, pp. 4-32, 1990 [GIL 98] GILLON F., BROCHET P., Optimization of a brushless permanent magnet motor with the experimental design method, IEEE Transactions on Magnetics, Vol. 34, No. 5, pp 3648-3651, 1998 [GUI 94] GUILLAUME PH., MASMOUDI M., Computation of high order derivatives in optimal shape design, Numerische Mathematik, Vol. 67, pp. 231-250, 1994. [HAM 99] HAMEYER K., BELMANS R., Numerical modelling and design of electrical machines and devices, Wit press, 1999 [HAN 87] HANSEN P.C., The truncated SVD as a method of regularization, BIT 27, pp 543-535, 1987 [HAN 93] HANSEN P.C., The use of the L-curve in the regularization of discrete ill-posed problems, SIAM J. Sci. Comput., Vol 14, No. 6, pp 1487-1503, 1993 [HER 99] HERAULT C., MARECHAL Y., Boundary and interface conditions meshless methods [for EM field analysis], IEEE Transactions on Magnetics, Vol. 35, no. 3, pp. 1450-1453, 1999 [HES 69] HESTENES M.R., Multiplier and gradient methods, Journal of Optimization Theory and Aplications, no. 4, pp. 303-320, 1969 [HOL 75] HOLLAND J.H., Adaptation in natural and artificial system, The University of Michigan Press, 1975 [HOO 89] HOOLE S.R.H., Computer-aided Analysis and Design of electromagnetic devices, Elsevier, 1989 [HOO 91] HOOLE S.R.H., WEEBER K., SUBRAMANIAM S., Fictivious minima of object functions, finite elements meshes, and elements in electromagnetic device synthesis, IEEE Transactions on Magnetics, Vol. 27, No. 6, pp. 5214-5216, 1991 [HU 92] HU N., Tabu Search Method with random moves for globally optimal design, International Journal for Numerical Methods in Engineering, vol. 35. No. 5, pp. 1055-1070, 1992 [KAD 93] KADDED K., SALDANHA R.R., COULOMB J.L., Mathematical minimization of the time harmonics of the EMF of a DC-PM machine using a finite element method, IEEE Transactions on Magnetics, Vol. 29, No. 2, pp. 1747-1752, 1993 [KASP 95] KASPER M., HAMEYER K., KOST A., Automated optimal design of a permanent magnet DC motor using global evolution strategy and FEM, Int. Journal of Applied Electromagnetics & Mechanics, No. 6, pp. 367-376, 1995 [KIR 83] KIRKPATRICK S., GELATT C.D., VECCHI, M.P., Optimisation by Simulated Annealing, Science, 220, pp 671-680, 1983 [KOW 68] KOWALIK J., OSBORNE M.R., Methods for Unconstrained Optimization problems, Modern analytic and computational methods in Science and Mathematics, Richard Bellman Ed., 1968

Optimisation (Jean-Louis COULOMB) 59
[KOZ 95] KOZA J.R., Genetic Programming, Cambridge, MA, MIT Press, 1992 [LAI 67] L AITHWAITE E.R., Magnetic Equivalent Circuits for electrical machines, Proc. IEE, Vol. 114, No. 11, pp. 1805-1809, 1967 [MAH 95] MAHEY P., SALDANHA R.R., COULOMB J.L., Moving asymptotes and active set strategy for constrained optimization design in magnetostatic problems, International Journal for Numerical Methods in Engineering, Vol. 38, pp 1021-1030, 1995 [MIC 94] MICHALEWICZ Z., Genetic Algorithms + Data Structures = Evolution Programs, Springer Verlag, 1994 [MOH 97] MOHAMMED O.A., ULER F.G., A hybrid technique for the optimal design of electromagnetic devices using direct search and genetic algorithm, IEEE Transactions on Magnetics, Vol. 33, No. 2, pp. 1931-1934, 1997 [NAY 91] NAYROLES B, TOUZOT G., VILLON P., La méthode des éléments diffus, Compte rendu à l’Académie des Sciences, 313, série II, pp. 133-138, Paris, 1991 [NEL 65] NELDER J.A., MEAD R., A simplex method for function minimization, Computer Journal, 1965 [NGU 99] NGUYEN T.N., COULOMB J.L., High order FE derivatives versus geometric parameters. Implantation on an existing code, IEEE Transactions on Magnetics, Vol. 35, no. 3, pp. 1502-1505, 1999 [OZI 97] OZIL P., Plans d’expériences (D.O.E.), Polycopié ENS d’Electrochimie et d’Electrométallurgie, INPG, 1997 [PAR 94] PARK I.H., LEE H.B., KWAK I.G., HAHN S.Y, Design sensitivity analysis for steady state eddy current problems by continuum approach, IEEE Transactions on Magnetics, Vol. 20, No. 5, pp. 3411-3414, 1994 [PET 97] PETIN P., COULOMB J.L., CONRAUX P., High derivatives for fast sensitivity analysis in linear magnetodynamics, IEEE Transactions on Magnetics, Vol. 33, No. 2, pp 1149-1154, 1997 [POW 65] POWELL M.J.D., An efficient method for finding the minimum of a function of several variables without calculating derivations, Computer Journal, vol. 7. pp. 155-162, 1965 [POW 69] POWELL M.J.D., A method for nonlinear constraints in minimization problems, Optimization, Academic Press, New York, pp. 283-298, 1969 [PRE 90] PREIS K. ZIEGLER A., Optimal design of electromagnetic devices with Evolution Strategies, COMPEL, Vol. 9, suppl. A, pp. 119-122, 1990 [PRE 92] PRESS W.H., Numerical Recipes in C : The Art of Scientific computing, Cambridge University Press, 1992 [RAM 97] RAMIREZ J.A., FREEMAN E.M., Sensitivity analysis for the automatic shape design of electromagnetic devices in 3D using FEM, IEEE Transactions on Magnetics, Vol. 33, No. 2, pp. 1856-1859, 1997

60 "Electromagnétisme et problèmes couplés", "Electromagnétisme et éléments finis 3", EGEM, Hermes (2002) (version du 14/12/2002)
[RAO 96] RAO S.S., Engineering optimization : Theory and Practice, John Wiley & Sons, 1996 [REC 94] RECHENBERG I., Evolution Strategy, in [ZUR 94], pp. 147-159, 1994 [ROC 73] ROCKAFFELAR R.T., A dual approach to solving nonlinear programming problems by unconstrained optimization, Mathematical Programming, Vol. 12, no. 6, pp. 555-562, 1973 [ROT 41] ROTERS H.C., Electromagnetics devices, John Wiley and Sons Inc, New York, 1941 [SAB 86] SABONNADIERE J.C., COULOMB J.L., La méthode des éléments finis : Du modèle à la CAO, Hermès, 1986 [SAD 91] SADO G., SADO M.C., Les plans d’expériences : de l’expérimentation à l’Assurance Qualité, Afnor Technique, 1991 [SAR 98a] SARENI B., KRÄHENBÜHL L., NICOLAS A., Niching Genetic Algorithms for optimization in electromagnetics : I. Fundamentals, IEEE Trans. on Magnetics, Vol. 34, No. 5, pp. 2984-2987, 1998 [SAR 98b] SARENI B., KRÄHENBÜHL L., MULLER D., Niching Genetic Algorithms for optimization in electromagnetics : II. Shape Optimization of Electrodes using the CSM, IEEE Trans. on Magnetics, Vol. 34, No. 5, pp. 2988-2991, 1998 [SAL 98] SALUDJIAN L., COULOMB J.L., IZABELLE A., Genetic Algorithm and Taylor development of the finite element solution for shape optimization of electromagnetic devices, IEEE Transactions on Magnetics, Vol.34, No.5, pp. 2841-2844, 1998 [SCH 98] SCHIMMERLING P. SISSON J.C., ZAÏDI A., Pratique des plans d’expériences, Lavoisier, 1998 [SIL 83] SILVESTER P.P., FERRARI R.L., Finite elements for electrical engineers, Cambridge University Press, Cambridge, 1983 [TAG 87] TAGUCHI G., System of Experimental Design, Unipub/Kraus International Publication, 1987 [TAK 96] TAKAHASHI N., EBIHARA K., YOSHIDA K., NAKATA T., OHASHI K., MIYATA K., Investigation of simulating annealing method and its application to optimal design of die mold for orientation of magnetic powder, IEEE Transactions on Magnetics, Vol. 32, no. 3, pp. 1210-1213, 1996 [TIK 76] TIKHONOV, A.N., ARSENINE V., Méthodes de résolution de problèmes mal posés, Mir, 1976 [TIK 98] TIKHONOV, A.N., LEONOV A.S., YAGOLA A.G., Non linear ill-posed problems, Chapman & Hall, 1998 [VIV 01] V IVIER S., GILLON F., BROCHET P., Optimization techniques derived from experimental design method and their application to the design of a brushless direct current motor, IEEE Transactions on Magnetics, Vol. 37, no. 5, pp. 3622-3626, 2001
Optimisation (Jean-Louis COULOMB) 61
[ZIE 79] ZIENKIEWICZ O.K., La méthode des éléments finis, Mc Graw Hill, 1979 [ZUR 94] ZURADA J.M., MARKS R.J., ROBINSON C.J., Computational Intelligence : Imitating Life, IEEE Press, New Jersey, 1994
Termes à indexer
Optimisation, analyse de sensibilité, plan d’expériences numériques, surface de réponse, électromagnétisme, méthode des éléments finis, méthode des éléments diffus