
CAPITULO – 08 - gob.mx · alternativo”, “Motor rotativo” y “Turbohélice” la potencia...
73
CAPITULO – 08 – - FICHAS TÉCNICAS
Transcript of CAPITULO – 08 - gob.mx · alternativo”, “Motor rotativo” y “Turbohélice” la potencia...

CAPITULO
– 08 –
- FICHAS TÉCNICAS

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página152
PRODIAT 2014
DATOS GENERALES
–Categoría: se distinguen 5 categorías siguiendo la guía de clasificación de UAS de la OTAN: Clase Imicro, Clase I mini, Clase I ligero, Clase II y Clase III.
–Nombre: se usa el nombre común, correspondiente a la última versión de cada sistema. Lascaracterísticas “Experiencia / Horas de Vuelo”, “País Utilizador” y “Zonas de Operación” tienen en cuentatodas las versiones anteriores del UAS de cada ficha.
–Fabricante: se indica el o los fabricantes originales del UAS.
–País: nacionalidad del o de los fabricantes del sistema.
–Estado: se distinguen “En desarrollo” (UAS actualmente en fase de desarrollo), “En producción” (UASdesarrollados, pero no desplegados en operaciones reales) y “Operativo” (UAS desplegados enoperaciones reales); para esta última categoría se indica entre paréntesis el año en el que han realizadosu primera operación real.
–Experiencia / Horas de vuelo: se indica una cifra orientativa del número de misiones realizadas y/o delas horas de vuelo acumuladas por el UAS.
–País utilizador: para los UAS operativos se indican los países que están operándolo. No siempre esposible incluir todos los países utilizadores, por tratarse de datos confidenciales. Únicamente se recogendatos publicados.
–Zonas de operación: se indican algunos de los países o regiones en los cuales el UAS ha realizadooperaciones reales.
PERFORMANCES:
–Autonomía máxima: se indica la máxima autonomía de la plataforma aérea, independientemente de lacarga de pago embarcada. Para algunos UAS de la Clase I la autonomía se indica en minutos, y para elresto de categorías en horas.
–Techo de vuelo (ASL): se indica el techo de vuelo operativo en pies (ft) por encima del nivel del mar.
–Altitud nominal de operación (AGL): se indica la altitud habitual de operación en pies (ft) por encimadel nivel del terreno.
–Velocidad máxima: se indica en nudos (kts) la máxima velocidad en vuelo del UAV. Para algunos UAS dela Clase III la velocidad se indica en mach.
–Velocidad de crucero: se indica en nudos (kts) la velocidad o rango de velocidades de crucero del UAV.
–Velocidad mínima: se indica en nudos (kts) la velocidad mínima de operación del UAV.

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página153
PRODIAT 2014
–Alcance (Comunicaciones): se indica en kilómetros el máximo alcance donde se reciben tanto datosde telemetría como de sensores embarcados.
CARACTERÍSTICAS TÉCNICAS:
–Peso máximo al despegue (MTOW): se indica en kg el peso máximo al despegue.
–Peso máximo de carga de pago (MPL): se indica en kg el peso máximo de la o las cargas de pagoembarcadas, excluyendo el combustible, e incluyendo cargas de pago internas como externas.
–Cargas de pago: se indican las posibles cargas de pago embarcadas por el UAV.
–Longitud: se indica en metros la longitud total del UAV.
–Envergadura: se indica en metros la envergadura de punta a punta de ala del UAV para los de ala fija, yel diámetro en metros del rotor principal para los de ala rotatoria.
–Altura: se indica en metros la altura total del UAV.
–Propulsión: se indica el tipo de planta propulsora y número de motores empleados por el UAV (“Motoreléctrico”, “Motor alternativo”, “Motor rotativo”, “Turbohélice”, “Turbofán”, “Ductedfan”).
–Potencia: se indica en vatios (W) para “motores eléctricos”, en hp para las categorías de “Motoralternativo”, “Motor rotativo” y “Turbohélice” la potencia de cada uno de los motores, y el empuje en kNpara la categoría de “Turbofán”.
–Comunicaciones: se indica si las comunicaciones son en línea de visión directa (LOS) y/o vía satélite(SATCOM).
–Lanzamiento: se indica el modo de lanzamiento del UAV. Las categorías son “Manual” cuando ellanzamiento se realiza con la mano; “Pista” cuando el despegue/lanzamiento se realiza de formaconvencional desde una pista; “Catapulta” cuando el lanzamiento del UAV se realiza desde unacatapulta, “Cohete” cuando se emplea un cohete (“Booster”) para el lanzamiento del UAV.
–Recuperación: se indica el modo de recuperación del UAV. Las categorías son “Pista” cuando elaterrizaje/recuperación se realiza de forma convencional en un pista; “Paracaídas” cuando larecuperación se realiza desplegando un paracaídas; “Gancho” cuando el UAV se recupera mediante undispositivo que se engancha a alguna parte del UAV; “Red” cuando el UAV se recupera atrapándolo enuna red; “bellylanding” cuando el aterrizaje se realiza sobre la panza del UAV; “Patines” cuando elaterrizaje se realiza con un tren de aterrizaje de patines; y “Pérdida profunda” cuando el aterrizaje serealiza mediante este sistema.
–Comentarios: cualquier información adicional.

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página154
PRODIAT 2014
CATEGORÍAS
CLASE I MICRODentro de la categoría “Clase I micro” se incluyen los UAS más pequeños que se pueden encontrar. LosUAV de esta categoría son de lanzamiento manual y solo necesitan un operador. El alcance de estacategoría no suele superar los 5 km con altitudes de unos 200 pies. Este tipo de UAS es usado porpequeñas unidades de entidad pelotón o sección. Uno de los sistemas más representativos de esta clasees el “Spy Arrow” de Thales.
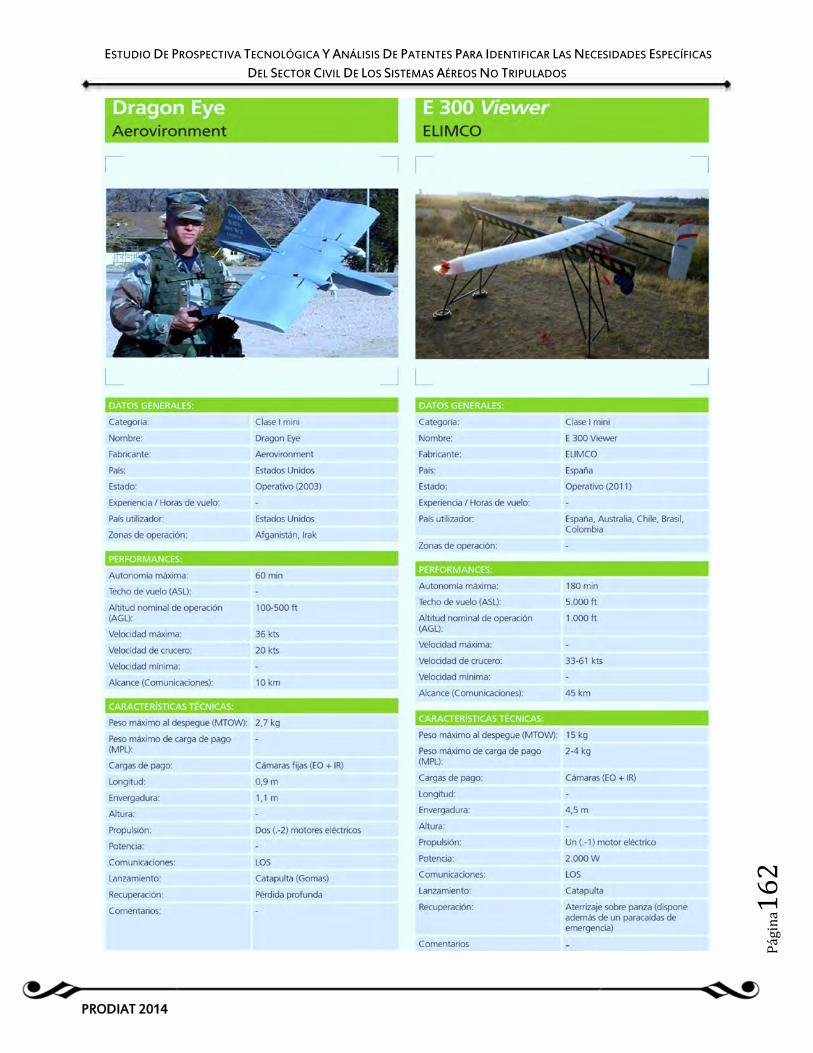
CLASE I MINIEn la categoría “Clase I mini” se encuentran aquellos UAS donde el UAV tiene un peso máximo aldespegue (MTOW) de 15kg. El alcance y altitud máxima es algo mayor que los de la clase “micro”pudiendo alcanzar 25 km y ascender hasta 3.000 pies de altitud. La mayoría de las cargas de pago sonpara obtención de video en tiempo real. Generalmente el lanzamiento es manual y la recuperación serealiza mediante “perdida profunda” o “aterrizaje sobre panza”. La operación de los UAS de esta clasese realiza por equipos de 1 o 2 personas y se usan por unidades de entidad sección o compañía.Los sistemas más representativos de esta categoría son el Raven de la compañía norteamericanaAerovironment o el Skylark de la compañía israelí Elbit Systems.
CLASE LIGEROEn la categoría “Clase I ligero” se incluyen aquellos UAS donde el UAV tiene un peso máximo aldespegue (MTOW) comprendido entre 15 y 150 kg. El lanzamiento de los UAV de esta clase se realizageneralmente mediante catapulta o pista y su recuperación por red, gancho o en pista. El alcance superalos 50 km con altitudes máximas de vuelo superiores a 5.000 pies. Son empleados en unidades deentidad regimiento o batallón.Cabe destacar dentro de esta Clase el “Scaneagle” de la empresa norteamericana Boeing o el Skylark deElbit Systems.
CLASE IIEn la categoría Clase II se incluyen aquellos UAS donde el UAV tiene un peso máximo al despegue(MTOW) entre 150 kg y 600 kg. El lanzamiento se realiza mediante catapulta o en pista, y la recuperaciónes generalmente en pista. Tienen un alcance que puede superar los 200 km y alcanzan altitudesmáximas mayores a 10.000 pies. Para su uso se necesita personal e instalaciones preparados, usándoseen unidades de entidad Brigada.Dentro de esta categoría se encuentran por ejemplo el Searcher de IAI o el Campcopter de Schiebel.CLASE IIEn la categoría Clase II se incluyen aquellos UAS donde el UAV tiene un peso máximo al despegue(MTOW) entre 150 kg y 600 kg. El lanzamiento se realiza mediante catapulta o en pista, y la recuperaciónes generalmente en pista. Tienen un alcance que puede superar los 200 km y alcanzan altitudesmáximas mayores a 10.000 pies. Para su uso se necesita personal e instalaciones preparados, usándoseen unidades de entidad Brigada.Dentro de esta categoría se encuentran por ejemplo el Searcher de IAI o el Campcopter de Schiebel.
CLASE IIIEn la categoría Clase III se incluyen aquellos UAS donde el UAV tiene un peso máximo al despegue(MTOW) mayor a 600 kg. La guía de clasificación de UAS de la OTAN los divide en tres grupos: MALE(altura de operación hasta 45.000 pies); HALE (altura de operación hasta 65.000 pies); y UAS deCombate. Para la realización de las fichas no se han tenido en cuenta estos tres grupos y se clasifican

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página155
PRODIAT 2014
simplemente como UAS Clase III. Su lanzamiento y recuperación es mediante pista convencional. Tienenun alcance que llega en algunos casos a ser transoceánico y con alturas de hasta 65.000 pies. Laoperación de estos UAS es realizada por unidades de mayor entidad, requieren ciertas infraestructuraspara el lanzamiento, recuperación y mantenimiento y, al tratarse de sistemas de mayor complejidad, seindividualizan los roles de piloto y de operador de cargas de pago.Cabe destacar dentro de esta Clase el Predator-Reaper de General Atomics.

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página156
PRODIAT 2014
CLASE I – MICRO MINI LIGERO

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página157
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página158
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página159
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página160
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página161
PRODIAT 2014
ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página162
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página163
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página164
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página165
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página166
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página167
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página168
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página169
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página170
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página171
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página172
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página173
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página174
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página175
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página176
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página177
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página178
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página179
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página180
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página181
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página182
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página183
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página184
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página185
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página186
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página187
PRODIAT 2014
CLASE II

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página188
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página189
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página190
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página191
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página192
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página193
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página194
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página195
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página196
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página197
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página198
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página199
PRODIAT 2014
CLASE III

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página200
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página201
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página202
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página203
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página204
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página205
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página206
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página207
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página208
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página209
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página210
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página211
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página212
PRODIAT 2014

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página213
PRODIAT 2014

ACRONIMOS
- ACRÓNIMOS/SIGLAS/ABREVIATURAS

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página215
PRODIAT 2014
Sigla/Abreviatura/Acrónimo
Significado En Su Idioma Original Sigla/Abreviatura/Acrónimo
Significado En Su Idioma Original
AAR Air To Air Refuelling LIF Laser Information FieldABSAA Airborne Sense And Avoid LINS Laser Inertial Navigation SystemAC Alternate Current LMS Least Mean Square
ACARSAircrafts Communication AndReporting System LNA Low Noise Amplifier
ACCD Actual Crop Characteristic Data LO Linear Optimization
ACCORDAirborne Coordinated ConflictResolution Detection LOC Loss Of Consciousness
ACG Automatic Contingency Generator LORAN Long Range NavigationACK Acknowledge LOS Line Of SightACL Autonomous Control Levels LOX Liquid OxygenACS Autonomous Control System LPOI Low Probability Of InterceptADC Analog Digital Converters LRF Laser RangefinderADS Air Deployment System LRIT Long Range Identification TrackingAERPAS Asociación Española De RPAS LRS Launch And Recovery StationAES Advanced Encryption Standard LSA Light Sport AircraftAESA Active Electronically Scanned Array LSDIS Light Special Divisions Interim SensorAFRL Air Force Research Laboratory LSM Lens Shift MountAGL Above Ground Level LTA Large Transport AircraftAGPS Assisted Global Positioning LTB Load Transfer BracesAHRS Attitude Heading Reference System LTC Launch Tube Cluster
AI Artificial Intelligence LVDTLinear Variable DifferentialTransformer
AINS Aided Inertial Navigation System MAC Medium Access ControlAIS Automatic Identification System MAD Magnetic Anomaly DetectionAMP Adaptive Mounting Plate MALE Medium Altitude Long EnduranceAMSL Above Mean Sea Level MAN Metropolitan Area NetworkANR Active Noise Reduction MAP Maximum A ProbabilityAO Atomic Oxygen MAR Minimum Angular ResolutionAOA Angle Of Attack MAV Micro Aerial VehicleAOP Autonomous Operation Planner MAW Mission Adaptive WingAOS Angle Of Sideslip MBPS Megabits Per SecondAPI Application Programming Interface MC Muzzle CapAPS Advanced Photo System MCM Missile Counter MeasuresAR Aspect Ratio MEB Multiple Elevation BeamARC Atlantic Research Corporation MEDEVAC Medical EvacuationARU Alternator Rectifier Unit MEL Minimum Equipment ListingASA Air Surveillance Application MEMS Micro Electro Mechanical SystemASAS All Source Analysis System MEO Medium Earth Orbit
ASCASSAeronautical Source Collection AndService System MFOV Medium Field Of View
ASDOCAutonomous Smart Data OriginationComponents MHT Multiple Hypothesis Tracking
ASICApplication Specific IntegratedCircuit MI Mutual Information
ASP Application Service Provider MIDCAS Mid Air Collition Avoidance SystemASV Autonomous Surface Vehicle ML Maximum LikelihoodASW Anti Submarine Warfare MLS Microwave Landing System

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página216
PRODIAT 2014
ATC Air Traffic Control MLU Multifunctional Light UnitATM Air Traffic Management MMA Mission Maritime AircraftATN Ancillary Terrestrial Network MMSI Maritime Mobile Service Identity
ATR Automatic Target Recognition MOSP Multi Mision Optronic StabilizedPayload
ATS Automatic Total Stations MOUT Military Operations Urban TerrainAUV Autonomous Underwater Vehicle MPA Maritime Patrol Aircraft
AUVSI Association For Unmanned VehicleSystems International MPL Maximum Payload
AV Aerial Vehicle MPPT Maximum Power Point TrackerAVC Air Vehicle Computer MPR Maritime Patrol RadarAVL Athena Vortex Lattice MPS Mission Planning Station
AWACSAirborne Warning And ControlSystem MSI Multisensor Integrator
BAM Buque De Acción Marítima MSL Mean Sea LevelBAMS Broad Area Maritime Surveillance MT Missile TechnologyBAN Body Area Network MTC Mission Task ComponentsBDA Battle Damage Assessment MTCR Missile Technology Control RegimeBDC Bottom Dead Center MTF Modulation Transfer FunctionBF Beam Forming MTI Moving Target IndicatorBIM Building Information Model MTOW Maximum Take Off WeightBLOS Beyond Line Of Sight MTT Multi Target TrackingBN Bridge Nodes MUAC Maastricht Upper Area ControlBNC Bayonet Neill Concelman MUAV Micro Unmanned Aerial VehicleBOD Biological Oxygen Demand MWIR Medium Wave InfraredBPF Bandpass Filter NA Numerical ApertureBPSK Binary Phase Shift Key NAS National Airspace SystemBSFC Brake Specific Fuel Consumption NC Network ControllerBW Bandwidth NCAP Nematic Curved Aligned PolymericCA Collision Avoidance NCAR National Center Atmospheric Research
CAA Civil Aviation Authority NDVINormalized Difference VegetativeIndex
CAD Codes Are NEO Near Earth OrbitCAN Controller Area Network NFOV Narrow Field Of ViewCAP Combat Air Patrol NGS National Geodetic SurveyCAS Close Air Support NIMA National Imagery Mapping AgencyCAT Collision Avoidance Threshold NIR Near Infrared
CATEC Centro Avanzado De TecnologíasAeroespaciales NIST
National Institute StandardsTechnology
CAV Combat Air Vehicle NLOS Non Line Of SightCB Center Buoyancy NM Nautical Miles
CCD Charge Coupled Device NMEANational Marine ElectronicsAssociation
CCL Commerce Control List NNAG Nato Naval Armaments Group
CD Compact Disk NOAANational Oceanographic AtmosphericAdministration
CDAS Combat Decision Aid Software NOC National Operations CenterCDF Cumulative Distribution Function NOMS Operations Monitoring SystemCDL Common Data Link NS National SecurityCDMA Code Division Multiple Access NSS Navigation Satellite SystemCDP Cell Differential Pressure NTP Network Time Protocol

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página217
PRODIAT 2014
CDPD Cellular Data Packet Devices NTSB National Transportation Safety Board
CDTI Centro De Desarrollo Tecnológico EIndustrial NTSC National Television System Committee
CDU Controller Display Units NVIS Near Vertical Incident SkywaveCE Cyanate Ester OA Overlap Area
CEDEA Centro De Experimentación De ElArenosillo OC Operation Centre
CESIFA MET – Centro De Simulación De LasFAMET OCA Offensive Counterair
CETCChina Electronic TechnologyCorporation OCR Optical Character Recognition
CF Carrier Frequency OCS Orbital Control StationCFAR Constant False Alarm Rate OCU Operator Control UnitCFIT Controlled Flight Into Terrain OD Outer Diameter
CG Center Gravity OFDMOrthogonal Frequency DivisionMultiplexing
CGF Computer Generated Force OFDMAOrthogonal Frequency DivisionMultiple Access
CGS Common Ground Station OICW Objective Individual Combat WeaponCHEST Channel Estimation OLCP Outer Loop Control Processor
CIAR Centro De InvestigaciónAeroportada De Rozas OLED Organic Light Emitted Diode
CID Caller Id ONR Of Navy Research
CIED Counter Improvised DevicesExplosive OODA Observation Orient Decide Act
CIP Continuation In Part OPV Optionally Piloted VehicleCIR Color Infrared ORCA Or Concepts AppliedCL Center Lift OTD Other Technical DetailsCM Center Mass PA Policing Authority
CMC Cargo Management Computer PASI Plataforma Autónoma Sensorizada DeInteligencia
CMM Coordinate Measurement Machines PBP Postbuckled Precompressed
CMOSComplementary Metal OxideSemiconductor PBS Polarizing Beam Splitter
CMS Control Mapping Status PBT Polybutylene TerephthalateCMT Cellular Material Theory PC Personal ComputerCNC Computer Numeric Control PCA Point Closest ApproachCOA Certificate Of Authorization PCC Power Conditioning CircuitCOLT Combat Observation Lasing Team PCI Peripheral Connect InterfaceCOMINT Communications Intelligence PCIG Pc Image GenerationCONOPS Concept Operations PCL Passive Coherent LocationCOP Common Operational Picture PCLK Pixel Clock
CORSContinuously Operating ReferenceStations PCS Personal Communications System
COTS Commercial Off The Shelf PCT Patent Cooperation TreatyCPA Closest Point Approach PDA Personal Digital Assistant
CPDLCController Pilot Data LinkCommunication PDC Propeller Drive Controller
CPU Central Processing Unit PDN Potentially Disruptive Node
CROPCommon Relevant OperationalPicture PDU Propeller Drive Unit

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página218
PRODIAT 2014
CRT Cathode Ray Tube PET Passive Emitter TrackingCRW Canard Rotor Wing PETN Pentaerythritol TetranitrateCSA Control Surface Actuators PI Proportional IntegratorCSAR Combat Search And Rescue PIC Pilot In CommandCSSS Coastal Safety Security System PID Proportional Integral Differential
CTAE Centro De TecnologíasAeroespaciales PK Probability Kill
CTE Coefficient Thermal Expansion PLA Programmable Logic ArrayCTS Conventional Total Stations PLD Programmable Logic DevicesCV Control Variable PLRS Position Location Reporting SystemCW Continuous Wave PM Progress MonitoringDAB Digital Audio Broadcast PMT PhotomultiplierDAC Digital Analog Converter POA Port Of Arrival
DAFIFDigital Aeronautical FlightInformation File POB Point Of Beginning
DARPADefense Advanced ResearchProjects Agency POD Port Of Departure
DAS Data Acquisition System POI Probability Of InterceptDB Database POL PoliceDC Direct Current PP Predefined PathDCA Defensive Counterair PPI Parallel Peripheral InterfaceDCPA Digital Central Processing Assembly PPP Precise Point Positioning
DCPCDirect Controller PilotCommunications PPS Pulse Per Second
DCT Direct Cosine Transform PRF Pulse Repetition FrequencyDDF Decentralized Data Fusion PRI Pulse Repetition IntervalDDL Digital Data Link PRN Pseudorandom NoiseDE Extraction PRR Pulse Repetition Rate
DEERSDefense Enrollment EligibilityReporting System PS Passive Sonar
DEM Digital Elevation Model PSA Pressure Sensitive AdhesiveDES Data Encryption Standard PSCT Polymer Stabilized Cholesteric TextureDF Direction Finding PSF Peer Sensor FusionDFS Deutsche Flugsicherung PSTN Public Switched Telephone NetworkDFT Discrete Fourier Transform PTAM Parallel Tracking And Mapping
DGAM Dirección General De Armamento YMaterial PTAMM
Parallel Tracking And MultipleMapping
DGAP Designed Gap PTC Point To CoordinateDGPS Differential Gps PV Process VariableDIAL Differential Absorption Lidar PVC Polyvinyl ChlorideDIS Distance PW Pulse WidthDMA Dynamic Mechanical Analyzer PWM Pulse Width Modulation
DMASData Management AnalysisSubsystem QA Quality Assurance
DME Distance Measuring Equipment QARS Quick Access RecordersDMR Dynamic Modulus Resins QC Quality CheckDND Distributed Neighbour Discovery QPSK Quadrature Phase Shift KeyingDOA Direction Of Arrival RAM Random Access MemoryDOC Direct Operating Cost RAR Real Aperture RadarDOD Domestic Object Damage RBAC Role Based Access ControlDOF Degrees Of Freedom RC Radio Control

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página219
PRODIAT 2014
DOG Difference Of Gaussians RCC Remote Control CenterDPC Displaced Phase Centres RCR Resolution Cell ResponseDPCA Displaced Phase Centre Antenna RCS Radar Cross SectionDRFM Digital Radio Frequency Memory RD RadarsDSC Digital Selective Calling RDC Remote Directional CommandDSP Digital Signal Processor RDF Radio Direction Finder
DSRCDedicated Short RangeCommunications RDR Remote Directional Response
DSS Decision Support System RE ReferenceDTED Digital Terrain Elevation Data RES Response Expert SystemDTG Dynamically Tuned Gyro RF Radio FrequencyDU Depleted Uranium RFACE CurvatureDUO Designated Uav Operator RFI Request For InformationDVD Digital Versatile Device RFID Radio Frequency IdentificationEA Electronic Attack RFLOS Radio Frequency Line Of SightEASA European Aerospace Agency RHA Rolled Homogeneous Armor
EATREnergetically Autonomous TacticalRobot RIG Rate Integrating Gyro
EB Enemy Ballistics RLG Ring Laser GyroEBIU External Bus Interface Unit RLU Response Logic UnitECC Electronic Control RN Regular Nodes
ECCM Electronic CounterCountermeasures ROA Remotely Operated Aircraft
ECCNExport Control ClassificationNumber ROA Remotely Operated Aircraft
ECEF Earth Centered Earth Fixed ROC Regional Operations CentreECM Electronic Counter Measures ROI Region Of InterestECS Environmental Control System ROM Read Only Memory
EDA European Defence Agency ROVER Remote Operations Video EnhancedReceiver
EDB Expected Data Bit RP Ram PlateEDC Correction RPA Remotely Piloted AircraftEDF Erbium Doped Fiber RPAS Remotely Piloted Aircraft SystemEDL Landing RPM Revolutions Per MinuteEDM Electronic Distance Meter RPV Remotely Piloted Vehicle
EECMAExpendable Electronic CounterMeasures Assembly RRT Random Tree
EFI Electronic Fuel Injection RS Recommended StandardEGT Exhaust Gas Temperature RSD Rational Software DeveloperEHG Electro Hydraulic Generators RSSI Received Signal Strength Indicator
EIRPEquivalent Isotropically RadiatedPower RT Rate
EL Emitter Location RTC Real Time ClockELINT Electronic Intelligence RTCM Radio Technical Commission Maritime
ELO Epitaxial Lift Off RTGRadioisotope ThermoelectricGenerator
ELOS Equivalent Level Of Safety RTK Real Time KinematicEM Electromagnetic RTM Resin Transfer MoldingEO Electro-Optic Sensor RTOS Real Time Operating SystemEOB Of Battle RUID Random Unit IdentifiersEOD Explosive Ordinance Disposal RVDT Rotary Variable Differential

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página220
PRODIAT 2014
TransformerEOP Emergency Override Protocol RVT Remote Video TerminalEP Electronic Protection RWR Radar Warning ReceiverEPR Estimated Plant Response S&A Sense And Avoid
EPROMErasable Programmable Read OnlyMemory SA Selective Availability
ERA Explosive Reactive Armor SAFE Safe Area Flight EmergencyERG Rocket Grenade SAP Session Announcement ProtocolERS Electronic Rolling Shutter SAR Synthetic Aperture RadarES Extended Squitter SAT StationESA European Space Agency SATCOM Satellite CommunicationsESM Electronic Support Measures SAV Safe Airspace VolumeESVS Enhanced Synthetic Vision System SBAS Satellite Based Augmentation SystemETA Estimated Time Arrival SBS Smart Bombs
ETAP European Technology AcquisitionProgramme SCB Submerged Center Buoyancy
ETID Estrategia De Tecnología EInnovación De La Defensa SCC Stress Corrosion Cracking
EW Electronic Warfare SCCB Serial Camera Control BusFAA Federal Aviation Authority SCCV Specified Crop Characteristic Value
FADA Federación Andaluza De DesarrolloAeroespacial SDF Sound Direction Finder
FAMET Fuerzas Aeromóviles Del Ejército DeTierra SDH Synchronous Digital Hierarchy
FAR Federal Aviation Regulations SDP Session Description ProtocolFCB Floating Center Buoyancy SE Secondary ElectronFCC Flight Control Computer SEAD Suppression Enemy Air DefensesFCI Flight Control Interpreter SESAR Single European Sky Atm Research
FCS Flight Control Surfaces SESASSynthetically Enhanced SituationAwareness System
FDMA Frequency Division Multiple Access SF Sensor FusionFE Finite Element SFED Streamer Front End DeflectorFEA Finite Element Analysis SFRT Standard Flight Rules ThresholdFEC Forward Error Correction SHH Shipboard Helo HandlerFED Field Emission Display SHORAN Short Range Navigation
FEET Pies SIDM Systèmes Interimaires De DroneMALE
FEM Finite Element SIGINT Signal IntelligenceFFT Fast Fourier Transform SIM Subscriber Identity ModuleFG Free Gyro SIVA Sistema Integral De Vigilancia AéreaFIC Fast Intercept Crafts SLAM Simultaneous Location And MappingFIR Finite Impulse Response SLD Supercooled Large DropletFLIR Forward Looking Infrared SLIP Serial Line Internet ProtocolFLP Floor Load Plate SLM Single Layer ModelFM Frequency Modulation SLS Starlight ScopeFMS Foreign Military Sales SMA Subminiature AFOB Forward Operating Base SMP Shape Memory PolymerFOD Foreign Object Damage SMS Stores Management SystemFOQA Flight Operation Quality Assurance SNR Signal Noise RatioFOV Field Of View SOC State Of ChargeFPA Focal Plane Array SOFC Solid Oxide Fuel Cell

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página221
PRODIAT 2014
FPGA Field Programmable Gate Array SOL Safe Options LimitFPLD Field Programmable Logic Devices SOLAS Safety Of Life At Sea
FPMAFlight Parameters MeasurementApparatuses SONAR Sound Navigation And Ranging
FPSOFloating Production StorageOffloading SONET Synchronous Optical Network
FPV First Person View SP Set PointFSK Frequency Shift Keying SPCMB Single Phase Centre MultibeamFTH Fiber The Home SPFF Solar Powered Formation FlightFW Front Wheel SPI Serial Peripheral InterfaceFXLMS Filter X Lms SPL Sound Pressure LevelGA General Aviation SRTM Shuttle Radar Topographic MappingGBSAA Ground Based Sense And Avoid SRUA Small Rotor Unmanned AircraftGCAS Ground Collision Avoidance System SSD Solid State DiskGCS Ground Control Station SSM Source Specific MulticastGCU Ground Control Unit SSR Secondary Surveillance RadarGEO Geostationary Orbit SST Self Separation ThresholdGIS Geographic Information System STANAG Standardization AgreementGIVE Grid Ionospheric Vertical Error STARS Standard Terminal Arrival RoutesGMC Graded Matrix Composites STC Supplemental Type CertificateGMTI Ground Moving Target Indicator STOVL Short Takeoff Vertical LandingGNC Control SUAS Small Unmanned Aerial VehicleGNSS Global Navigation Satellite System SUC System Use CaseGPS Global Positioning System SUGV Small Unmanned Ground VehicleGPU Graphic Processor Unit SUID Session User IdentifiersGRR Global Reset Release SVS Synthetic Vision SystemGSA Ground Surveillance Application SWIR Short Wave InfraredGSM Global System Mobile SWS Safety Warning SystemGTS Geographic Systems TARA Tactical Air Reconnaissance AssemblyGUI Graphical User Interface TAWS Terrain Awareness Warning SystemGVC Generic Vehicle Class TBO Trajectory Based OperationsHALE High Altitude Long Endurance TCAS Collision Avoidance SystemHALSOL High Altitude Solar TCDL Tactical Common Data LinkHAP High Assurance Platform TCP Trajectory Change PointsHC Homing Channel TDC Top Dead Center
HCCIHomogeneous Charge CompressionIgnition TDD Time Division Duplexing
HCI Human Computer Interface TDM Time Division MultiplexedHD High Density TDMA Time Division Multiple AccessHDD Hard Disk Driver TDOA Time Difference Of ArrivalHDTV High Definition Television TDS Tamper Detecting SealHE High Explosive TDU Trash Disposal UnitHEMT High Electron Mobility Transistor TEC Total Electron ContentHFDD Half Frequency Division Duplexing TECU Tec UnitsHFE Heavy Fuel Engine TEG Thermal Electrical GeneratorHIPS High Impact Polystyrene TER Triple Ejector RackHMD Head Mounted Display TFPV Thin Film PhotovoltaicHMI Human Machine Interface TI Texas InstrumentsHOE Holographic Optical Element TIG Tungsten Inert GasHOW Hand Over Word TLE Target Location ErrorHRTF Head Related Transfer Function TM Transmitter

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página222
PRODIAT 2014
HSARPAHomeland Security AdvancedResearch Projects Agency TO Takeover
HTN Hierarchical Task Network TOA Time Of ArrivalHUAV Hovering Unmanned Aerial Vehicle TOF Time Of FlightHUD Heads Up Display TOI Target Of InterestHVU High Value Units TOL Take Off LandingIAS Image Acquisition System TPM Trusted Platform Module
IC Integrated Circuit TSATransportation SecurityAdministration
ICAO International Civil AviationOrganization TTFF Time To First Fix
ICE Internal Combustion Engine UA Unmanned Aircraft
ICO Intermediate Circular Orbit UARTUniversal Asynchronous ReceiverTransmitter
ICP Iterative Closest Point UAS Unmanned Aerial SystemID Identification UAT Universal Access TransceiverIED Improvised Explosive Device UAV Unmanned Aerial VehicleIEDS Improvised Explosive Devices UC Uav Canister
IEEEInstitute Electrical ElectronicsEngineers UCAR
University Corporation AtmosphericResearch
IETF Internet Engineering Task Force UCAS Unmanned Combat Aerial SystemIF Intermediate Frequency UCAV Unmanned Combat Aerial VehicleIFF Identification Friend Foe UCS Uav Control SystemIFFT Inverse Fast Fourier Transform UGS Unmanned Ground SystemsIFNA Field Network Adjustment UGV Unmanned Ground Vehicle
IFOG Interferometric Fiber Optic Gyro UHMWPUltra High Molecular WeightPolyethylene
IFR Instrument Flight Rules UI User Interface
IGMPInternet Group ManagementProtocol ULTRA Ultra Large Transport Aircraft
II In UME Unidad Militar De EmergenciasIIR Infinite Impulse Response UML Unified Modelling LangageILS Instrument Landing System UMS Unmanned Maritime SystemsIME International Mobile Equipment UPS Universal Polar StereographicIMINT Image Intelligence USAF United States Air Force
IMM Interacting Multiple Model USAR Unmanned Aerial Vehicles SystemsAirworthiness Requirements
IMO International Maritime Organisation USB Universal Serial Bus
IMTKIndicator Maximum TemperatureKrystal USGS United States Geological Survey
IMU Inertial Measurement Unit USML United States Munitions List
IMUSEInsitu Multiple Uav SoftwareEnvironment USPAV
Unmanned Solar Powered AerialVehicle
INS Inertial Navigation System USV Unmanned Surface Vehicle
INTA Instituto Nacional De TécnicaAeroespacial UT User Terminal
IP Internet Protocol UTM Universal Transverse MercatorIPI Inter Pulse Intervals UV Ultra VioletIR Infrared UWB Ultra Wideband
IRNSSIndian Regional NavigationalSatellite System UXO Unexploded Ordnance

ESTUDIODE PROSPECTIVA TECNOLÓGICA Y ANÁLISISDE PATENTES PARA IDENTIFICAR LASNECESIDADES ESPECÍFICASDEL SECTORCIVILDE LOS SISTEMASAÉREOSNO TRIPULADOS
Página223
PRODIAT 2014
IRT Infrared Thermography VA Visual Analyzers
IRTCInternational Recommended TransitCorridor VACS Variable Autonomy Control System
ISA International Standard Atmosphere VAR Variation
ISI Intersymbol Interference VARTMVacuum Assisted Resin TransferMolding
ISTAR Intelligence, Surveillance, TargetAcquisition And Reconnaiss VCSEL Vertical Cavity Surface Emitting Lasers
ITARInternational Traffic ArmsRegulations VFD Variable Frequency Drive
ITS Intelligent Transportation System VFR Visual Flight RulesIUTZ Innercity Urban Terrain Zone VHF Very High FrequencyJAR Joint Aviation Requirements VIS Visible
JAUSJoint Architecture UnmannedSystem VLS Vertical Launching System
JCGUAS Joint Capability Group OnUnmanned Aerial Systems VMD Video Motion Detection
JEMAD Jefe De Estado Mayor De LaDefensa VROC Vertical Rate Of Climb
JPDA Joint Probabilistic Data Association VRS Virtual Reference StationJSF Joint Strike Fighter VTI Vertical Trend Indicators
JTIDSJoint Tactical InformationDistribution System VTMIS
Vessel Traffic ManagementInformation Systems
KIAS Knots Indicated Airspeed VTOL Vertical Take Off And LandingLADAR Laser Detection And Ranging VTS Vessel Traffic ServicesLADGPS Local Area Dgps WAAS Wide Area Augmentation SystemLALE Low Altitude Long Endurance WADGPS Wide Area DgpsLAN Local Area Network WAN Wide Area NetworkLCD Liquid Crystal Display WDM Wavelength Division MultiplexerLCF Low Cycle Fatigue WGS World Geodetic SystemLDPC Low Density Parity Check WIFI Wireless FidelityLDRF Laser Designator And Rangefinder WLAN Wireless LanLED Light Emitting Diode WOI Window Of InterestLEEFI Low Energy Exploding Foil Initiator WPTSIN WaypointsLEF Low Earth Flight WSAM Wafer Scale Antenna ModulesLEO Low Earth Orbit WSN Walking Stick NavigatorLF Lower Frequency ZEM Zero Effort Miss
ZVI Zero Velocity Indicator












![INDEX [download.geostru.eu]download.geostru.eu/User-Manual-WP/ES/MDC_ES.pdf · régimen de empuje en reposo (por ej. para muros de sótano) o de empuje activo. Para este último,](https://static.fdocuments.in/doc/165x107/5e3320f547798058f3158a71/index-rgimen-de-empuje-en-reposo-por-ej-para-muros-de-stano-o-de-empuje.jpg)

![Convex Push Plate Placa de Empuje Convexa Plaque de ... · para montar la placa de empuje en el activador. 7) Si el grosor de la pared es menor a 1-1/2” [38mm], rompa las barras](https://static.fdocuments.in/doc/165x107/60029c33743c2364fb2419f3/convex-push-plate-placa-de-empuje-convexa-plaque-de-para-montar-la-placa-de.jpg)
![Round Push Plate Placa de Empuje Redonda Plaque de Poussée …€¦ · para montar la placa de empuje en el activador. " [10m m] A B C 1-½" [38 mm] B Wall thickness . 9 ESPAÑOL](https://static.fdocuments.in/doc/165x107/60029b645b470052ab1beb57/round-push-plate-placa-de-empuje-redonda-plaque-de-pousse-para-montar-la-placa.jpg)


