C. Savarese, J. Beutel, J. Rabaey; UC BerkeleyICASSP 20011 Locationing in Distributed Ad-hoc...
12
C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 1 Locationing in Distributed Ad-hoc Locationing in Distributed Ad-hoc Wireless Sensor Networks Wireless Sensor Networks Chris Savarese, Jan Beutel, Jan Rabaey ICASSP 2001 University of California at Berkeley
-
Upload
madeline-taylor -
Category
Documents
-
view
215 -
download
0
Transcript of C. Savarese, J. Beutel, J. Rabaey; UC BerkeleyICASSP 20011 Locationing in Distributed Ad-hoc...

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 1
Locationing in Distributed Ad-hocLocationing in Distributed Ad-hocWireless Sensor NetworksWireless Sensor Networks
Chris Savarese, Jan Beutel, Jan Rabaey
ICASSP 2001
University of California at Berkeley

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 2
• Introduction to PicoRadio and triangulation
• A brief look at other research in the field
• Using redundancy to improve accuracy in position estimates
• Establishing initial position estimates
Presentation OutlinePresentation Outline

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 3
PicoRadio OverviewPicoRadio Overview
• Ad-hoc network of many sensors, monitors, and actuators (>100 total)
• No infrastructure
• Distributed computation
• Highly dynamic
• Limited radio range
• Every node capable of acting as repeater
• Obstacles
• Sensor data requires location tag to be useful

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 4
Positioning: The ProblemPositioning: The Problem
Reference Positions, Map Database
Other Networking Nodes, Distance and Geometric
Constellation
Finding the position of networking nodes
Relative positioning vs. Absolute positioning

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 5
Positioning 101Positioning 101
Triangulation Core Computation
• Least Squares
• Minimum Mean Squared Error
Measured Data
• Time of Arrival, Time Difference of Arrival require high clock
• Angle of Arrival too expensive – requires antenna arrays
• Preferred method: Received Signal Strength (RSSI)
• Ranges subject to as much as 50% error
Geometric Interpretation
• 2-D requires 3 anchors
• 3-D requires 4 anchors

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 6
• Dr. Yao, UCLA
• A Protocol for Distributed Node Location
• Does not consider error in range measurements
• Dr. Srivastava, UCLA
• Location Discovery in Ad-Hoc Wireless Networks
• Propagated awareness from closely packed anchors
• Kris Pister, Berkeley
• Smart Dust
• Centralized computation
Other ResearchOther Research

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 7
• Improve dilution of precision by incorporating redundancy into triangulation solution
• Exploit high connectivity
Exploiting RedundancyExploiting Redundancy
• Iteration on every node
• Receive neighbors’ positions
• Range estimation
• Position calculation
• Broadcast result to neighbors

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 8
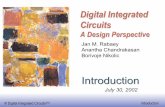
Individual TriangulationIndividual Triangulation
0 0.5 10
0.2
0.4
0.6
0.8
1
Delaunay Mesh of 25 Networked Nodes
x
0 0.5 10
0.2
0.4
0.6
0.8
1
Solution on 25 Ranges and 50% Error
x
0 0.5 10
0.2
0.4
0.6
0.8
1
50 Solutions and Mean
x
0.4 0.45 0.5 0.55 0.60.4
0.45
0.5
0.55
0.6
Zoom on Error
x
dx 0.0054
dy 0.0058
1% error
Position iterated on 25 ranges with 50% error

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 9
010
3020
5040
0
20
60
40
6
5
4
3A
vera
ge P
osit
ion
Err
or (
%)
Initial Position Error (%)
Range Error (%)
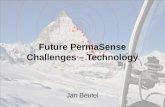
Network-wide triangulationNetwork-wide triangulation
• Average position error more sensitive to range error than to initial position estimate error
• Convergence problem related to quality of initial positions
Parameters:
• 10 nodes, 3 anchors
• 25 iterations, 30 trials
• Given initial estimates, nodes reposition themselves with respect to their neighbors
• Iterate until desired accuracy achieved

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 10
• Assumption Based Coordinates (ABC)
• n0 assumed to be at (0,0,0)
• n1 assumed to be at (r01,0,0)
r01 = RSSI range between n0 and n1
• n2 at (
Assumptions:
• n3 at (
Assumption:
r012 + r03
2 - r132
2r01
, r032-x3
2-y32 )
r032 – r23
2 + x22 + y2
2 - 2x2x3
2r01
,
r012 + r02
2 - r122
2r01
, r022-x2
2 , 0)x
y
z
n0 n1
n2
n3• positive square root
• z2 = 0
• positive square root
Establishing Initial Position EstimatesEstablishing Initial Position Estimates

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 11
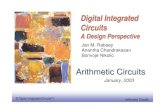
• Triangulation via Extended Range and Redundant Association of Intermediate Nodes
• ABC algorithm creates maps
• Target node waits to beincluded in 3 maps
• Extended rangescalculated fromrespective maps
• Triangulation bytarget node basedon extended ranges
• Iterate network-widetriangulation
TheThe TERRAINTERRAIN AlgorithmAlgorithm
1
2
3
radio range
extended range
intermediate node

C. Savarese, J. Beutel, J. Rabaey; UC Berkeley ICASSP 2001 12
• Position estimates accurate to within 6%
• Working to understand convergence/divergence cases
• Characterizing convergence time and energy cost
• Exploring means of lowering energy consumption
• Minimize expensive start up cost
• Optimize core triangulation algorithm
• Adapting algorithms to include confidence metrics
• Scaling simulations to include much larger node populations
Conclusions and Future WorkConclusions and Future Work