Blue Bear Systems Research Soar Agents for Unmanned Air & Ground Vehicles Dr Phill Smith 24 th Soar...
16
Blue Bear Systems Research Blue Bear Systems Research Soar Agents for Soar Agents for Unmanned Air & Ground Vehicles Unmanned Air & Ground Vehicles Dr Phill Smith Dr Phill Smith 24 24 th th Soar Workshop Soar Workshop 9 9 th th – 11 – 11 th th June 2004 June 2004 Building 32, Twinwoods Business Park, Clapham, Bedfordshire MK41 6AE Building 32, Twinwoods Business Park, Clapham, Bedfordshire MK41 6AE Tel: 01234 212001 Email: [email protected] Tel: 01234 212001 Email: [email protected] www.bluebearsystems.com www.bluebearsystems.com
-
date post
21-Dec-2015 -
Category
Documents
-
view
220 -
download
2
Transcript of Blue Bear Systems Research Soar Agents for Unmanned Air & Ground Vehicles Dr Phill Smith 24 th Soar...
Blue Bear Systems ResearchBlue Bear Systems ResearchSoar Agents for Soar Agents for
Unmanned Air & Ground VehiclesUnmanned Air & Ground Vehicles
Dr Phill SmithDr Phill Smith
2424thth Soar Workshop Soar Workshop99thth – 11 – 11thth June 2004 June 2004
Building 32, Twinwoods Business Park, Clapham, Bedfordshire MK41 6AEBuilding 32, Twinwoods Business Park, Clapham, Bedfordshire MK41 6AETel: 01234 212001 Email: [email protected]: 01234 212001 Email: [email protected]
www.bluebearsystems.comwww.bluebearsystems.com

Blue Bear Systems ResearchBlue Bear Systems Research
Presentation OverviewPresentation Overview
Outline of project objectives, and vehicle Outline of project objectives, and vehicle functionalityfunctionality
Walkthrough slides of a typical simulationWalkthrough slides of a typical simulation
Demonstration runDemonstration run
QuestionsQuestions
Project funded by SAICProject funded by SAIC
Blue Bear Systems ResearchBlue Bear Systems Research
ObjectivesObjectives
Development of a Soar agent:Development of a Soar agent: Exercised from the Simulink simulation Exercised from the Simulink simulation
environmentenvironment Controlling:Controlling:
Up to 6 unmanned ground vehiclesUp to 6 unmanned ground vehicles Up to 4 UAV’sUp to 4 UAV’s
MissionMission Form up into a teamForm up into a team Routine patrol through an urban areaRoutine patrol through an urban area Dynamically re-route around blocked roadsDynamically re-route around blocked roads Investigate areas of interestInvestigate areas of interest

Blue Bear Systems ResearchBlue Bear Systems Research
Conflicting GoalsConflicting Goals
The Unmanned Ground Vehicles:The Unmanned Ground Vehicles: Conduct a pre-planned patrolConduct a pre-planned patrol Avoid blockages – dynamic route planning all done Avoid blockages – dynamic route planning all done
in Soarin Soar Seal off an area of interest, and investigateSeal off an area of interest, and investigate
The Unmanned Air Vehicles:The Unmanned Air Vehicles: Top priority is to provide the ground teams with Top priority is to provide the ground teams with
comms-relaycomms-relay May conduct surveillance over:May conduct surveillance over:
Road blockagesRoad blockages Areas of interestAreas of interest

Blue Bear Systems ResearchBlue Bear Systems Research
Simulink ImplementationSimulink Implementation

Blue Bear Systems ResearchBlue Bear Systems Research
A Typical Run - 1A Typical Run - 1

Blue Bear Systems ResearchBlue Bear Systems Research
A Typical Run - 2A Typical Run - 2

Blue Bear Systems ResearchBlue Bear Systems Research
A Typical Run - 3A Typical Run - 3

Blue Bear Systems ResearchBlue Bear Systems Research
A Typical Run - 4A Typical Run - 4

Blue Bear Systems ResearchBlue Bear Systems Research
A Typical Run - 5A Typical Run - 5

Blue Bear Systems ResearchBlue Bear Systems Research
A Typical Run - 6A Typical Run - 6
Blue Bear Systems ResearchBlue Bear Systems Research
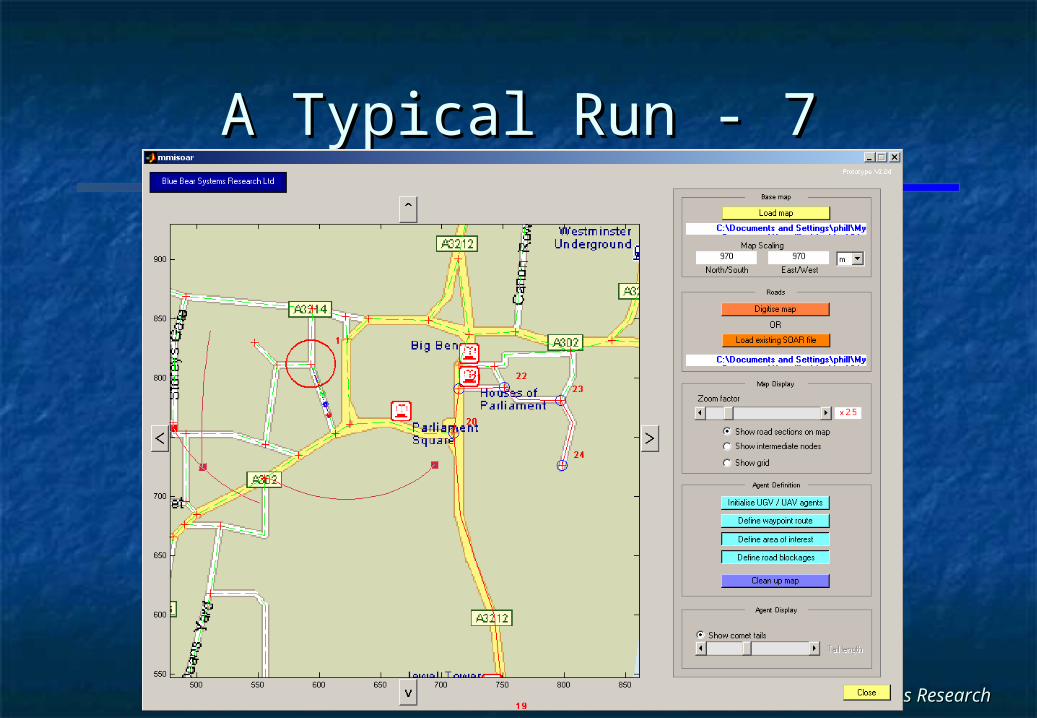
A Typical Run - 7A Typical Run - 7

Blue Bear Systems ResearchBlue Bear Systems Research
A Typical Run - 8A Typical Run - 8
Blue Bear Systems ResearchBlue Bear Systems Research
Project Next StepsProject Next Steps
Exact detail to be determinedExact detail to be determined
Moving towards hardware and Moving towards hardware and experimentationexperimentation
Will make use of our hardware Will make use of our hardware developmentsdevelopments Simon Willcox – presentation no. 12Simon Willcox – presentation no. 12

Blue Bear Systems ResearchBlue Bear Systems Research
Demo!Demo!

Blue Bear Systems ResearchBlue Bear Systems Research
ConclusionsConclusions
Soar is well suited to:Soar is well suited to: Equipping vehicles with true autonomyEquipping vehicles with true autonomy
Not just high level automation……Not just high level automation…… Needs to be structured as a multi-agent systemNeeds to be structured as a multi-agent system
Lends itself to software teams, not just individualsLends itself to software teams, not just individuals Ease of code re-useEase of code re-use
Can be used in a vehicle systems engineering Can be used in a vehicle systems engineering contextcontext
But….But…. Software V&V issuesSoftware V&V issues
Particularly with learning systemsParticularly with learning systems Certification issues for safety critical systemsCertification issues for safety critical systems