BLDC motor control reference design press presentation
17
www.silabs.com C8051F850 Sensorless BLDC Motor Control Reference Design
-
Upload
silicon-labs -
Category
Technology
-
view
1.537 -
download
4
Transcript of BLDC motor control reference design press presentation

www.silabs.com
C8051F850 Sensorless BLDC Motor Control Reference Design

2
Introducing the BLDC Motor Control Reference Design
Fully featured brushless dc (BLDC) motor control solution Demonstrates C8051F85x/6x control
of sensorless BLDC motors Incorporates motor-driving power
electronics with MOSFETs Motor control GUI allows real time
motor control and data streaming Contains everything needed to spin
motor in less than 5 minutes
Reference design benefits Highlights motor control features of the C8051F85x/6x MCU family
• 12-bit ADC• Dual comparators• High-speed PWM output• Intelligent comparator operation• Flexible crossbar architecture
Includes production-ready source code that expedites design-in time Provides a competitive, cost-effective solution

3
Small motors Remote control helicopters, toy cars Electronic speed controllers (ESC) PC fans Electric fans
Electric tools Cutters, shears, lawn mowers Staplers
Small appliances Mixers and grinders Electric shavers and toothbrushes Vacuum cleaners Condensers and evaporators
Target Applications

4
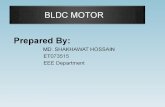
Motor Control Reference Design HardwareMCU Board
Powertrain Board
C8051F850
Gate Drivers
3-Phase Inverter
Power Source Option(Bench Power Supply)
Power Source Option(AC/DC Adaptor)
Turnigy 3800 kV Outrunner Helicopter Motor
Direction
Start/Stop
MCU Reset

5
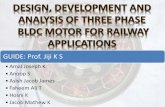
BLDC Motor Control Board Block Diagram
Rx
MTR_VDC
AH
AL
BH
BL
CH
CL
Three-Phase Inverter
J6
MTR_VA
MTR_VB
MTR_VC
M
J5MTR_VDC
12V
5V
3.3V
Regulators+12V
+3.3V
+5V
MCU_GND
VMA
MTR_VA
R23
R27C10
+3.3V
R68
MCU_GND
MTR_VA
MTR_VB
MTR_VC
C14 R34 R36
R33
R31
R35
R32
+3.3V
R73R72 R74
Zero-Crossing Detect Filter Circuit
MTR_VA
MTR_VB
MTR_VC
+3.3V
VMA
VMB
VMC
VMY
IM_0P
Gate Driver
Motor Mount BoardMCRD-MMT-1525
Powertrain Board MCRD-PWR-NLV
C8051F850
VMYVMCVMBVMA
Current sense amplifier
POT
+3.3V
Start/Stop
Direction
FG
UART_RX
UART_TX
UART-USB Bridge
C2 USB Debug
USB Hub
USB Interfaces
UART_TX
UART_RX
USB of PC
+3.3V
MCU Board MCRD-MCU-C8051F850
Sensorless BLDC Motor Control Hardware Block Diagram

6
Motor Control Reference Design Software
Production-ready firmware Spins a 2-pole motor at 200,000 rpm Expedites design-in time
Motor control GUI (Silicon Labs Spinner) Features Start/stop motor Speed control Direction control Real time monitoring
• Speed• PWM Duty Cycle• Current
Advanced mode availableSilicon Labs Spinner

7
Motor Control Reference Design Specifications
Parameter Min Typ Max UnitPower supply 10 24 VMotor driver PWM frequency 24 kHzContinuous average output current 10 ASpeed range (2-pole motor) 200,000 RPMSpeed range (4-pole motor) 100,000 RPMSpeed range (6-pole motor) 66,667 RPM
Motor Specifications - Turnigy 450 Series 3800 kV Brushless OutrunnerParameter Min Typ Max UnitNumber of poles 6Operating voltage range 7.4 14.8 VMaximum current 35 AMaximum power 365 WNo-load full-speed average current @ 12 V 3.66 ANo-load peak startup current @ 12 V 11 AMotor constant 3,800 RPM/VMaximum speed @ 12 V 45,600 RPM

8
C8051F85x/6x MCUs for Motor Control
Fast, cost-effective 8-bit CPU (25 MIPS) Designed to support 200,000 RPM for 2-pole BLDC motor
Flexible crossbar Enables PWM on any of 16 pins Supports mixed-mode PWM to improve long-term reliability of MOSFETs
• Requires MCU to support PWM output to all six MOSFETs
PWM-synchronized comparator blanking Automatic synchronization of zero crossing detection with motor PWM Reduces CPU overhead -- no need to interrupt every PWM cycle for zero
crossing detection• Enables higher frequency PWM for high-inductance motors
Comparator-clear PWM feature Enables automatic motor current limit during motor startup
Hyperdrive mode Technique to increase motor speed beyond rated maximum speed

9
C8051F85x/6x Motor Control EnhancementsTrue 12-bit ADC
Programmable sampling rate and resolution • 200 ksps @ 12-bit resolution • 800 ksps @ 10-bit resolution
Up to 16 channels Programmable gain 0.5x or 1x Window compare Temperature sensor
Internal precision voltage reference Voltage output 1.65 V ±2% absolute accuracy
Analog comparators Two analog comparators Programmable hysteresis and response time
• High speed @ 100 ns• Low power @ 1.5 µs Comparator ADC Multiplexing
12-bit ADC
ANALOG
MUX
Temperature Sensor
1.65V Internal Reference
VDDExternal Vref
(P0.0)
VDD
P0.0P0.1
P0.7
P1.0P1.1
P1.7
0.5x-1x Gain
ADC Block
12-bit ADC
MUX
MUX
Comparator1
MUXP1.0P1.1
P1.7
+
-
Programmable Hysteresis
ProgrammableResponse Time
0.5x-1x Gain
MUX
MUX
Comparator0+
-
Programmable Hysteresis
ProgrammableResponse Time
P0.1
P0.7
P0.0

10
Motor Control Enhancements Cont’d
Flexible comparator multiplexer to support sensorless BEMF commutation
General mux structure supports multiple input pins
Each input pin can be routed to (+) or (-)
Comparator inputs are multiplexed with ADC
Reduces the number of pins needed to perform sensorless BEMF commutation
PWM signal
CMP output
PWM output
Comparator clear function
3-channel 8- to11-bit or 16-bit PWM
Cycle-by-cycle current control Comparator clear function
(hardware fault protection)
Output polarity select control
Center and edge alignment PWM
PWM with Hardware Fault Protection
Motor Control Multiplexer
12-bit ADC
MUX
MUX
Comparator0
MUXP0.0P0.1P0.7
+
-
Programmable Hysteresis
ProgrammableResponse Time
0.5x-1x Gain

11
Zero Crossing Detection -- Comparators
C8051F850 advantage: synchronized PWM comparator blanking C8051F850 PWM can force a comparator input low Reduces CPU overhead to detect zero crossing when PWM is active; no need
to interrupt once or many times per PWM cycle
+
-
CMP0
VMA
VMY
P0.3 = PCA CEX0Operating as
tracking signal
P0MDIN.3 = 1
Output = high before ZCP
Peripheral configuration for zero crossing detection for rising open phase BEMF voltage
+
-
CMP0
VMA
VMY
P0.0 = PCA CEX0Operating as
tracking signal
P0MDIN.0 = 1
Output = high before ZCP Peripheral configuration for zero crossing detection for falling open phase BEMF voltage

12
Zero Crossing Detection
CEX1 (motor PWM)
CEX0 (tracking signal) Compa rator active tracking
PCA Cycl e Overflow
Comparator blanking synchronization with low motor PWM duty cycle
CEX1 (motor PWM)
CEX0 (tracking signal) Compa rator active tracking
PCA Cycl e Overflow
Comparator blanking synchronization with high motor PWM duty cycle

13
Motor Startup -- Automatic Current Limit
I_meas is op-amp amplified current sensor voltage
Motor PWM signal is automatically switched off by comparator clear feature of PCA peripheral
Firmware can program PWM duty cycle at a constant 50% and allow the comparator clear feature to limit the current automatically Typical solutions require a table of duty cycles tuned for a specific motor
Comparator Output (Black)(50% duty cycle)
Comparator Output (Red)(Comparator Clear)

14
Hyperdrive Mode
Open phase (shaded regions) terminal after zero crossing detection is free
Hyperdrive mode -- energize open phase AFTER zero crossing detection
Delivers additional torque to increase speed of motor
0 60 120 180 240 300 360 420 480 540 600 660 720 780
Phase A BEMF waveform
Phase A Commutation Instants
Phase A Zero Crossings
Phase B BEMF waveform
Phase B Commutation Instants
Phase B Zero Crossings
Phase C BEMF waveform
Phase C Commutation Instants
Phase C Zero Crossings

15
Motor Control Reference Design Contents
Contains everything you need to get the motor spinning in five minutes
Evaluation materials Data sheets Motor control hardware Quick-start guide and user’s guide Silicon Labs Spinner
Development collateral Schematics BOM Motor control source code www.silabs.com/mcu
C8051F850-BLDC-RD retails for $164.99
Silicon Labs Spinner

16
Fully featured BLDC reference design Demonstrates C8051F85x/6x MCU control of
sensorless BLDC motors Includes all hardware required to spin a motor Motor control GUI allows real-time motor control
and data streaming
Highest performance 8-bit solution for motor control 200,000 rpm achieved with 2-pole motor PWM-synchronized comparator blanking Automatic current limit during motor startup Incorporates hyperdrive mode to increase speed
Accelerated design for fast time-to-market Production-ready source code expedites design-
in time Development collateral available at
www.silabs.com/mcu
Get Your BLDC Motor Control Design Up and Spinning

www.silabs.com
Thank You!
www.silabs.com/mcu