Basic Models in Theoretical Neuroscience Oren Shriki 2010 Differential Equations.
19
Basic Models in Theoretical Neuroscience Oren Shriki 2010 Differential Equations
-
Upload
clinton-brooks -
Category
Documents
-
view
216 -
download
2
Transcript of Basic Models in Theoretical Neuroscience Oren Shriki 2010 Differential Equations.

Basic Models in Theoretical Neuroscience
Oren Shriki
2010
Differential Equations

Two Types of Dynamical Systems
• Differential equations:Describe the evolution of systems in continuous time.
• Difference equations / Iterated maps:Describe the evolution of systems in discrete time.

What is a Differential Equation?• Any equation of the form:
• For example:
0,,,2
2
dx
yd
dx
dyyF
0644
4
dx
ydy
dx
dy
Order of a Differential Equation
• The order of a differential equation is the order of the highest derivative in the equation.
• A differential equation of order n has the form:
0,,,,2
2
n
n
dx
yd
dx
yd
dx
dyyF
1st Order Differential Equations
• A 1st order differential equation has the form:
• For example:
yxfdx
dy,
yxdx
dy 2

Separable Differential Equations
• Separable equations have the form:
• For example:
yhxgdx
dy
yxdx
dy 2

Separable Differential Equations
• How to solve separable equations?
• If h(y)≠0 we can write:
• Integrating both sides with respect to x we obtain:
xgyh
xy
'
dxxgdxxyyh
'1

Separable Differential Equations
• By substituting:
• We obtain:
dxxydy
xyx
'
dxxgyh
dy

Example 1
xeydx
dy 21
Cey
Cey
dxey
dy
x
x
x
tan
tan
1
1
2
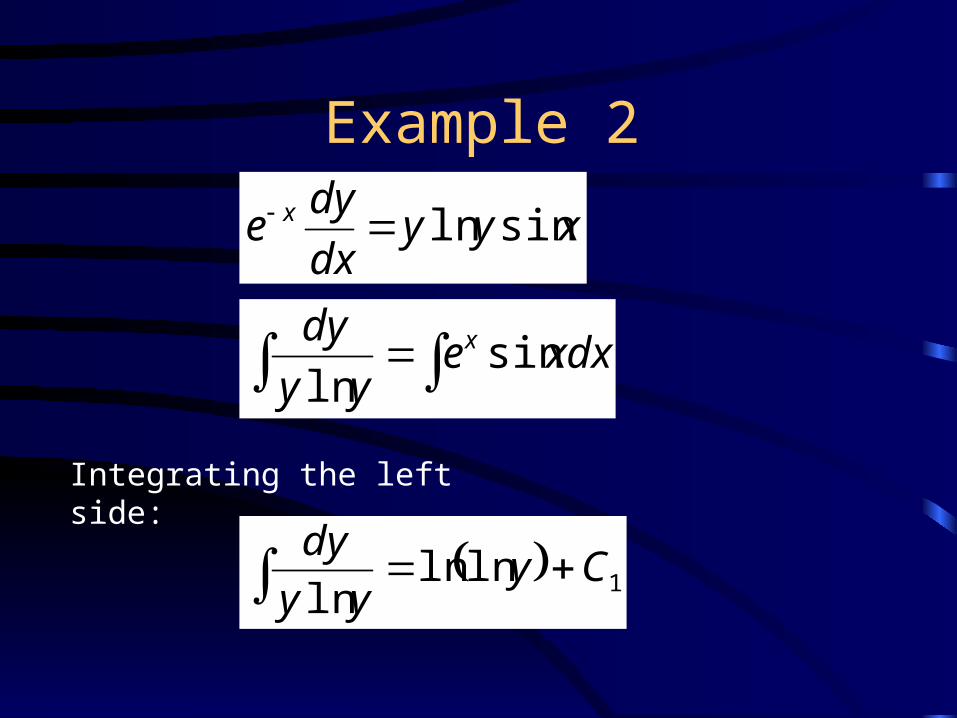
Example 2
xyydx
dye x sinln
xdxeyy
dy x sinln
1lnlnln
Cyyy
dy
Integrating the left side:
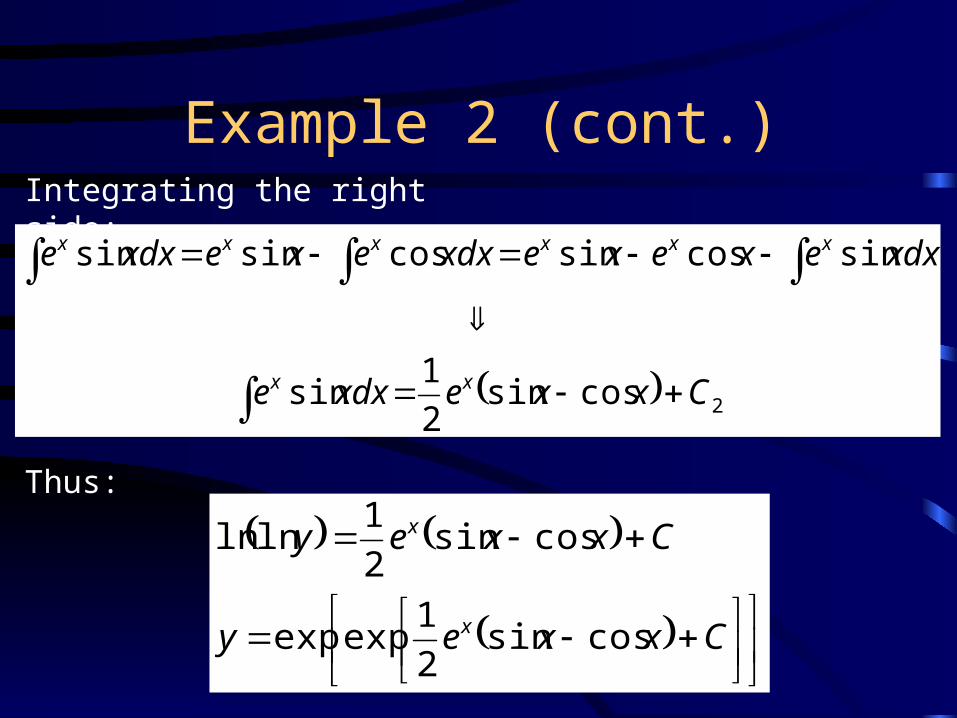
Example 2 (cont.)
2cossin2
1sin
sincossincossinsin
Cxxexdxe
xdxexexexdxexexdxe
xx
xxxxxx
Cxxey
Cxxey
x
x
cossin2
1expexp
cossin2
1lnln
Integrating the right side:
Thus:

Linear Differential Equations
• The standard form of a 1st order linear differential equation is:
• For example:
xQyxPdx
dy
xyxdx
dysin

Linear Differential Equations
General solution:
• Suppose we know a function v(x) such that:
• Multiplying the equation by v(x) we obtain:
yxvxPdx
dyvyxv
dx
d
dxxQxvxv
y
xQxvyxvdx
d
xQxvyxvxPdx
dyxv
1
)(

Linear Differential Equations
• The condition on v(x) is:
• This leads to:
yxvxPdx
dyvyxv
dx
d
yxvxPdx
dvy
yxvxPdx
dyv
dx
dvy
dx
dyv

Linear Differential Equations
• The last equation will be satisfied if:
• This is a separable equation:
xvxPdx
dv
dxxPev
dxxPv
dxxPv
dv
ln

Linear Differential Equations
• To sum up:
• Where:
dxxQxvxv
y
xQyxPdx
dy
1
dxxPexv

Example
• Solution:
xeyxdx
dyx sinhcosh
xeeexv xdxxdxxPcosh)cosh(ln)tanh()(
x
eyx
dx
dy x
coshtanh
)cosh(x
exQ
x

Example (cont.)
dxx
ex
x
dxxQxvxv
y
x
cosh)cosh(
)cosh(
1
1
Cex
xy x
cosh
1)(
Derivative with respect to time
• We denote (after Newton):
dt
dxx