
The Linearity-Efficiency Compromise Presenter :Yu-Cheng Cheng.
Upload
drabbit-cheng-longCategory
view
89download
1
BACKGROUND AND PROJECT EXPERIENCE
CHENG LONG
Presented by

OverviewPersonal Information & BackgroundExperience & Project **Interest / HobbySummary

Personal Information Name: Cheng Long (程龙 ) Gender: Male Date of Birth: 02/11/1987 Nationality: P. R. China Language: Chinese, English, Cantonese
Working & Education Background 2011.6~present
Mechanical Engineer ASM Technology Singapore 2010.9~2011.6
Research Assistant The Hong Kong Polytechnic University
2008.8~2010.6 Master’s Degree The Hong Kong Polytechnic University Major: Mechanical Engineering
2004.9~2008.6 Bachelor’s degree Zhejiang University (浙江大学 ) Major: Process Equipment and Control Engineering (过程装备与控制工程 )
Personal Information & Background

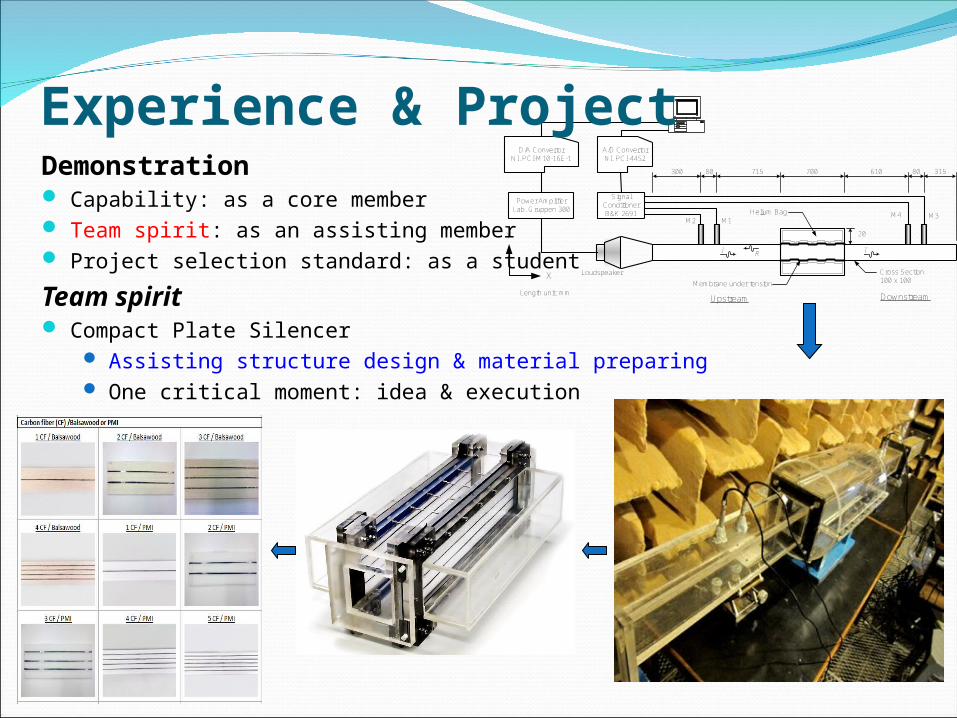
Demonstration Capability: as a core member Team spirit: as an assisting member Project selection standard: as a student
Capability WIRE BONDER
Transducer; Bondhead; XY table; Optics; Work holder, Chassis, etc.
XY Table Role: Mechanical design & project execution through a whole project
Experience & Project

Main features Fastest wire bonder XY Table with 30g acceleration
(competitor: <20g) Linear motion technology (moving magnet) High precision Linear Way & Encoder Accuracy: 1 micron (>600Hz bandwidth)
Wire Bonder XY Table
Existing product Acceleration <20g Linear motion technology (moving coil) Bandwidth < 500Hz
X motor
Y motor
XY stage, CRW, Encoder
Coil
Coil
MagnetMagnet

Wire Bonder XY TableContent of work – Mechanical Design Specification & requirement understanding Conceptual design (e.g., moving magnet vs moving
coil) Critical components selection (e.g., LM guide, CRW,
encoder, etc.) Detail design and calculation, pre-analysis via CAE
(e.g., result analysis and structure stiffness optimization before releasing design)
Jig & fixtures design, prototype test & debug (by spectrum analysis approach)
Thermal & reliability test, etc.
X motor
Y motor
XY stage, CRW, Encoder
Coil
Coil
MagnetMagnet

Content of work – Project Execution Technique discussion with significant vendors (e.g., PM, IKO, HDH) Design for manufacture & assembly, design to reduce cost Assembly checklist lay down, operators training Mass production process follow up & coordination Field issue identifying & handling
Urgency handle Encoder issue in customer field (at demo stage)
Root cause identification Fast learning under pressure Issue debugging & solving Result & stability
Motor assembly in factory (Shenzhen plant)
Project status (Apr 2015) Design fixed & Major issue cleared Mass production and sale: middle 2015 Gained capability: design, execution, problem-solving
Wire Bonder XY Table
X motor
Y motor
XY stage, CRW, Encoder
Coil
Coil
MagnetMagnet
D/A ConvertorNI. PCI-M10-16E-1
SignalConditionerB&K 2691
Power AmplifierLab. Gruppen 300
Loudspeaker
M4 M3M1M2
3158061070071580300
Membrane under tension
Cross Section100 x 100
DownstreamUpstream
20
A/D ConvertorNI. PCI-4452
TRI
Length unit: mm
Y
X
Helium Bag
Experience & ProjectDemonstration Capability: as a core member Team spirit: as an assisting member Project selection standard: as a student
Team spirit Compact Plate Silencer
Assisting structure design & material preparing One critical moment: idea & execution

D/A ConvertorNI. PCI-M10-16E-1
SignalConditionerB&K 2691
Power AmplifierLab. Gruppen 300
Loudspeaker
M4 M3M1M2
3158061070071580300
Membrane under tension
Cross Section100 x 100
DownstreamUpstream
20
A/D ConvertorNI. PCI-4452
TRI
Length unit: mm
Y
X
Helium Bag
Joint: from screw connection to welding
6mm space earned
Experience & ProjectDemonstration Capability: as a core member Team spirit: as an assisting member Project selection standard: as a student
Team spirit Compact Plate Silencer
Assisting structure design & material preparing One critical moment: idea & execution

CHOICE #1
Experience & ProjectDemonstration Capability: as a core member Team spirit: as an assisting member Project selection: as a student
Project selectionChoice #1: challenge & interest – unknown factors Modeling, Design and Analysis of a Robot System for
Garment Inspection Mechanical model & control system establishment
(a paper published in ASME) Fuzzy logic PID Matlab simulink
Choice #2: safety – professional correlation Project related to injection mold design

MODELING, DESIGN AND ANALYSIS OF A ROBOT
SYSTEM FOR GARMENT INSPECTION

INTRODUCTION
Research objectiveA robot system, consisting of a
3-DOF robotic hanger and an adaptive controller, is proposed in this project
It is expected that this system can facilitate garment inspection process
Schematic diagram of The Robotic Hanger

INTRODUCTION
Main tasksTo establish the dynamic modelTo design a proper Fuzzy Logic PID
(FPID) controllerTo demonstrate the feasibility of the
proposed robot system with computer simulation

MODELING OF THE GARMENT HANGER
Physical modelA pair of symmetrical
mechanisms with a
body link, a shoulder
link and a sleeve link
driven by three AC
servo-motors
Physical View of The Robotic Hanger

Block diagram of Fuzzy Logic PID control
∑ ∑
cos Coefficient ∑
sign c
K
Ra
PlantPID Controller
G
f
fG
cos
)(sign
)(tVin
)(tVc
)(te
Force sensor
F
Desiredforce Fd
Outputforce F
)(tVm
Fuzzy LogicController
e
es
)(tKP
)(tK I
)(tKD∑
∑
∑
)(tKP
)(tK I
)(tKD
∑
PK~
DK~
IK~
PK
DK
IK
∑
∑
)(te
Memory
Memory
Memory

Different materials
PID FPID
Settings: c1inew=10c1i, c2inew=8c2i and c3inew=5c3i
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.15
0.3
Simulation time (s)
Forc
e (N
)
Force on the body link
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.1
0.2
Simulation time (s)
Forc
e (N
)
Force on the sleeve link
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.2
0.4
Simulation time (s)
Forc
e (N
)
Force on the shoulder link
Set Value
PID
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.15
0.3
Simulation time (s)
Forc
e (N
)
Force on the body link
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.1
0.2
Simulation time (s)
Forc
e (N
)
Force on the sleeve link
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.1
0.2
Simulation time (s)
Forc
e (N
)
Force on the shoulder link
Set Value
FPID

CONCLUSIONS
In a word, it can be concluded that the Fuzzy Logic PID control is effective in controlling the robot hanger and regulating the garment forces.

Overview Personal Information & Background Experience & Project ** Interest / Hobby Summary
Interest / hobby Badminton: 3rd prize at a team competetion in ZJU Chinese chess: 1st prize at high school

Overview Personal Information & Background Experience & Project ** Interest / Hobby Summary
Summary 优点 :
项目能力 ; 解决问题能力 ; 学习能力 团队协作责任感 ; 决心与激情
缺点 : 未做出实际成就时的包装能力
不是 天马行空 而是 能做事 , 可共事



















