
Asynchronous Circuit Verification and Synthesis with Petri Nets J. Cortadella Universitat...
69
Asynchronous Circuit Asynchronous Circuit Verification and Verification and Synthesis with Petri Synthesis with Petri Nets Nets J. Cortadella Universitat Politècnica de Catalunya, Barcelona ks to: Michael Kishinevsky (Intel Corporation) Alex Kondratyev (The University of Aizu) Luciano Lavagno (Politecnico di Torino) Enric Pastor (Universitat Politècnica de Catal Alex Taubin (The University of Aizu) Alex Yakovlev (University of Newcastle upon Ty
-
date post
22-Dec-2015 -
Category
Documents
-
view
219 -
download
0
Transcript of Asynchronous Circuit Verification and Synthesis with Petri Nets J. Cortadella Universitat...

Asynchronous Circuit Verification Asynchronous Circuit Verification and Synthesis with Petri Netsand Synthesis with Petri Nets
J. Cortadella
Universitat Politècnicade Catalunya, Barcelona
Thanks to: Michael Kishinevsky (Intel Corporation) Alex Kondratyev (The University of Aizu) Luciano Lavagno (Politecnico di Torino) Enric Pastor (Universitat Politècnica de Catalunya) Alex Taubin (The University of Aizu) Alex Yakovlev (University of Newcastle upon Tyne)

Motivation
Interfaces are often asynchronous Subsystems with different clocks often
want to talk to each other Self timing provides functional and
temporal modularity … and no clock skew, low power,
low EMI, average performance, ...

Why Petri nets ?
Formal model to specify causality, concurrency and choice between events
Simple enough to easily derive state-level information (logic synthesis)
Powerful enough to implicitly represent a large state space

Outline
Design flow Synthesis
– Specification– State encoding– Logic decomposition
Synthesis of Petri nets Formal verification

Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
DesignDesignflowflow
x
y
z
x+
x-
y+
y-
z+
z-
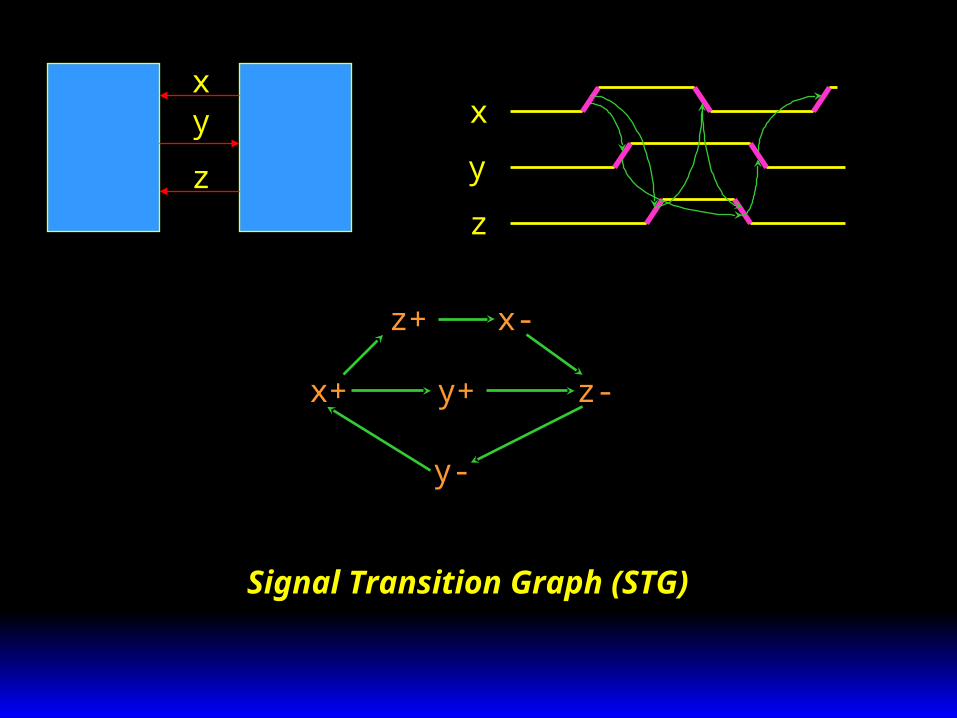
Signal Transition Graph (STG)
xy
z

x
y
z
x+
x-
y+
y-
z+
z-

x+
x-
y+
y-
z+
z-
xyz000
x+
100y+z+
z+y+
101 110
111
x-
x-
001
011y+
z-
010
y-

xyz000
x+
100y+z+
z+y+
101 110
111
x-
x-
001
011y+
z-
010
y-
Currentstate
Nextstate
Currentstate
Nextstate
Synchronous
Asynchronous

xyz000
x+
100y+z+
z+y+
101 110
111
x-
x-
001
011y+
z-
010
y-
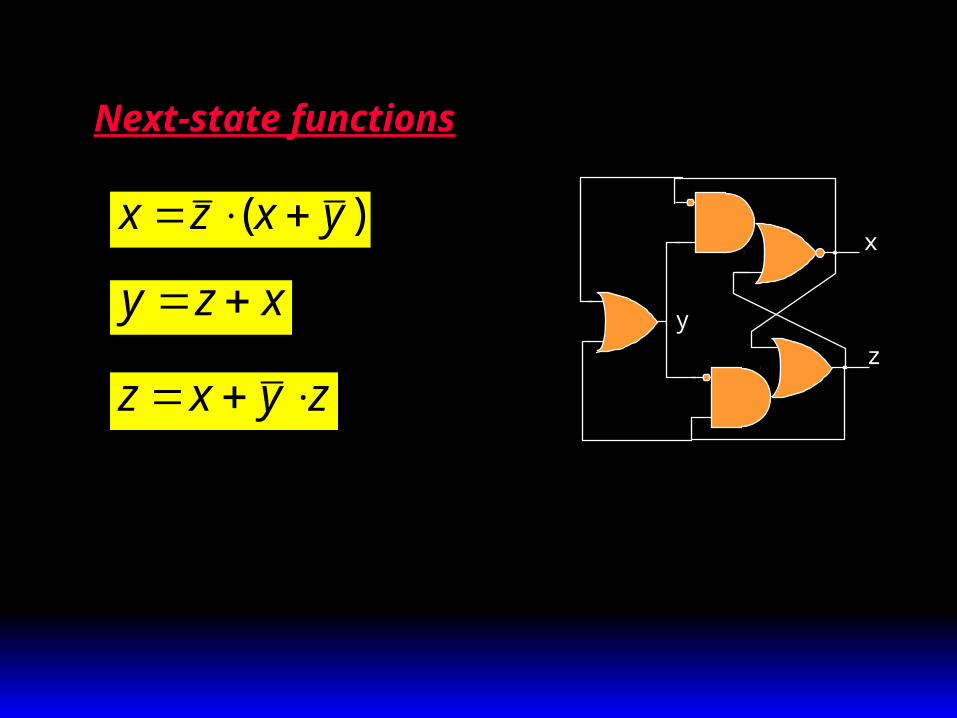
Next-state functions
x z x y ( )
y z x
z x y z
Next-state functions
x z x y ( )
y z x
z x y z
x
z
y

Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
DesignDesignflowflow

VME bus
DeviceLDS
LDTACK
D
DSr
DSw
DTACK
VME BusController
DataTransceiver
BusDSr
LDS
LDTACK
D
DTACK
Read Cycle

STG for the READ cycle
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
LDS
LDTACK
D
DSr
DTACK
VME BusController

Choice: Read and Write cycles
DSr+
LDS+
LDTACK+
D+
DTACK+
DSr-
D-
LDS-
LDTACK- DTACK-
DSw+
D+
LDS+
LDTACK+
D-
DTACK+
DSw-
LDS-
LDTACK-DTACK-

Choice: Read and Write cycles
DTACK-
DSr+
LDS+
LDTACK+
D+
DTACK+
DSr-
D-
LDS-
LDTACK-
DSw+
D+
LDS+
LDTACK+
D-
DTACK+
DSw-
LDS-
LDTACK-DTACK-

Circuit synthesis
Goal:– Derive a hazard-free circuit
under a given delay model andmode of operation

Modes of operation
Currentstate
Nextstate
Fundamental mode– Single-input changes– Multiple-input changes
Input / Output mode– Concurrency
circuit / environment

STG for the READ cycle
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
LDS
LDTACK
D
DSr
DTACK
VME BusController
Speed independence
Delay model– Unbounded gate / environment delays– Certain wire delays shorter than certain
paths in the circuit Conditions for implementability:
– Consistency– Complete State Coding– Output persistency

Other synthesis approaches
Burst-mode machines– Mealy-like FSMs– Fundamental mode (slow environment)
VLSI programming– Syntax-directed translation from CSP
(“Communicating Sequential Processes”)– No logic synthesis– Circuit size ~ Size of the specification

Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
DesignDesignflowflow

State Graph (Read cycle)
DSr+
DSr+
DSr+
DTACK-
DTACK-
DTACK-
LDS-LDS-LDS-
LDTACK- LDTACK- LDTACK-
D-
DSr-DTACK+
D+
LDTACK+
LDS+

Binary encoding of signals
DSr+
DSr+
DSr+
DTACK-
DTACK-
DTACK-
LDS-LDS-LDS-
LDTACK- LDTACK- LDTACK-
D-
DSr-DTACK+
D+
LDTACK+
LDS+

Binary encoding of signals
DSr+
DSr+
DSr+
DTACK-
DTACK-
DTACK-
LDS-LDS-LDS-
LDTACK- LDTACK- LDTACK-
D-
DSr-DTACK+
D+
LDTACK+
LDS+
10000
10010
10110 01110
01100
0011010110
(DSr , DTACK , LDTACK , LDS , D)

QR (LDS+)QR (LDS+)
QR (LDS-)QR (LDS-)
Excitation / Quiescent Regions
ER (LDS+)ER (LDS+)
ER (LDS-)ER (LDS-)
LDS-LDS-
LDS+
LDS-

Next-state function
0 1
LDS-LDS-
LDS+
LDS-
1 0
0 0
1 1
1011010110

Karnaugh map for LDS
DTACKDSrD
LDTACK 00 01 11 10
00
01
11
10
DTACKDSrD
LDTACK 00 01 11 10
00
01
11
10
LDS = 0 LDS = 1
0 1-0
0 0 0 0 0 0/1?
1
111
-
-
-
---
- - - -
-
- ---
- - -

Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
DesignDesignflowflow

Concurrency reduction
LDS-LDS-
LDS+
LDS-
1011010110
DSr+
DSr+
DSr+

Concurrency reduction
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
(See today’s presentation in this workshop for more details)

State encoding conflicts
LDS-
LDTACK-
LDTACK+
LDS+
10110
10110
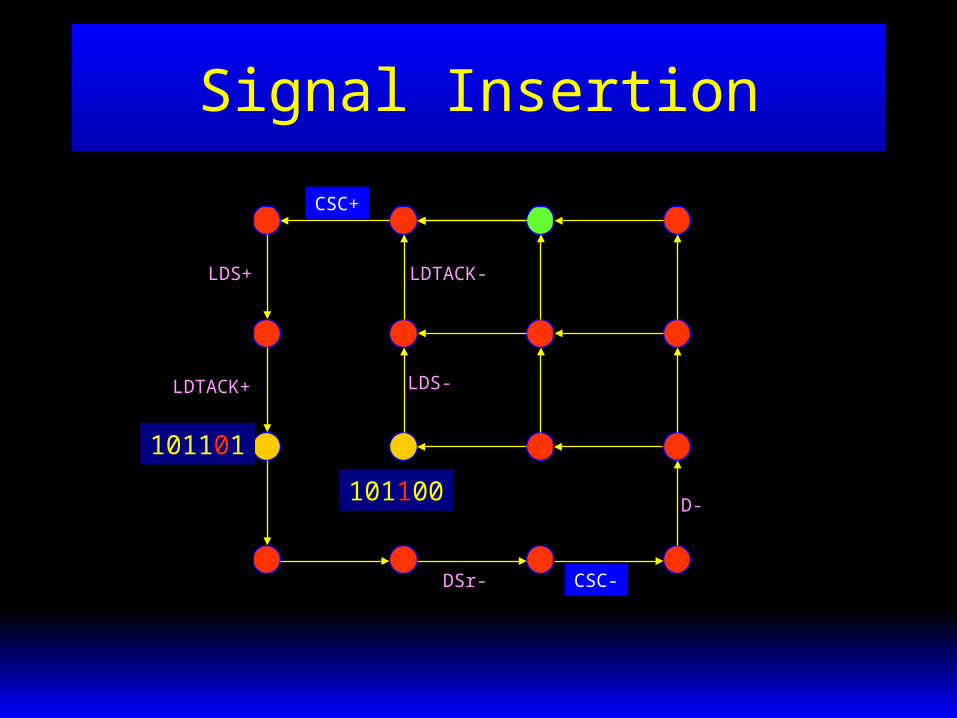
Signal Insertion
LDS-
LDTACK-
D-
DSr-
LDTACK+
LDS+
CSC-
CSC+
101101
101100

Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
DesignDesignflowflow

Complex-gate implementation
)(csccsc
csc
csc
LDTACKDSr
LDTACKD
DDTACK
DLDS

Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
DesignDesignflowflow

Hazards
abc
x 0
abcx1000
1
0
0
1100
b+1
1
00100
a-
0
1
0
0110
c+
0
1
1

Hazardsabcx1000
1100
b+
0100
a-
0110
c+
a
bz
cx
1
0
0
00
10001
1
0
001100
1
1
1
001100
0
1
1
00
0100
0
1
1
10
0110
0
1
1
11
0
1
0
11
0
1
0
10

Decomposition
Global acknowledgement Generating candidates Hazard-free signal insertion
– Event insertion– Signal insertion

Global acknowledgement
abc
z
abd
y
d- b+ d+ y+ a- y- c+ d-
c- d+ z- b- z+ c+ a+ c-
abc
z
abd
y
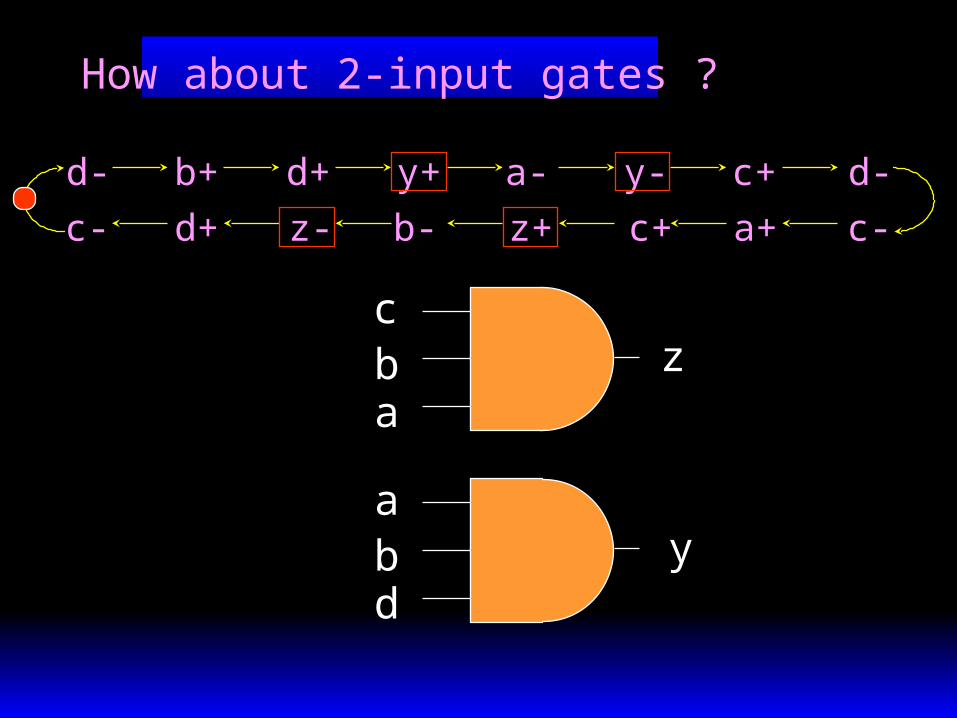
How about 2-input gates ?
d- b+ d+ y+ a- y- c+ d-
c- d+ z- b- z+ c+ a+ c-

a
bc
z
abd
y
How about 2-input gates ?
d- b+ d+ y+ a- y- c+ d-
c- d+ z- b- z+ c+ a+ c-

a
bc
z
abd
y
How about 2-input gates ?
00
d- b+ d+ y+ a- y- c+ d-
c- d+ z- b- z+ c+ a+ c-

abc
z
a
bd
y
How about 2-input gates ?
d- b+ d+ y+ a- y- c+ d-
c- d+ z- b- z+ c+ a+ c-

cz
dy
How about 2-input gates ?
a
b
d- b+ d+ y+ a- y- c+ d-
c- d+ z- b- z+ c+ a+ c-

Strategy for correct logic decomposition
Each decomposition defines a new internal signal of the circuit
Method: Insert new internal signals such that– After resynthesis,
some large gates are decomposed– The new specification is hazard-free under
unbounded gate delays

y-
z- w-
y+ x+
z+
x-
w+
1001 1011
1000
1010
0001
0000 0101
0010 0100
0110 0111
0011
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
Decomposition example

yz=1yz=0
1001 1011
1000
1010
0001
0000 0101
0010 0100
0110 0111
0011
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
1001 1011
1000
1010
0001
0000 0101
0010 0100
0110 0111
0011
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
C
C
x
y
x
y
w
z
xyz
y
zw
z
w
z
y

s-
s+
s-
s-
s=1
s=0
1001 1011
1000
1010
0111
0011y+
x-
w+
z+
z-
0001
0000 0101
0010 0100
0110
x+
w-
w-
w-
z-
z-y+
y+
x+
x+
1001
1000
1010
y+
z-
0111
C
C
x
y
x
y
w
z
x
y
z
w
z
w
z
y
sy-

s-
s+
s-
s-
s=1
s=0
1001 1011
1000
1010
0111
0011y+
x-
w+
z+
z-
0001
0000 0101
0010 0100
0110
x+
w-
w-
w-
z-
z-y+
y+
x+
x+
1001
1000
1010
y+
z-
0111
y-y-
z- w-
y+ x+
z+
x-
w+
s-
s+
s-
s+
s-
s+
s-
s+
s-
s+
s-
s+
s-
s+
s-
s+

C
C
x
y
x
y
w
z
xyz
y
zw
z
w
z
y
yz=1yz=0
1001 1011
1000
1010
0001
0000 0101
0010 0100
0110 0111
0011
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+

s-
s+
s=1
s=0
1001 1011
0111
0011
x-
w+
z+
0001
0000 0101
0010 0100
0110
x+
w-
w-
w-
z-
z-y+
y+
x+
x+
1001
1000
1010
y+
z-
0111
y-y-
z- w-
y+ x+
z+
x-
w+
s-
s+
s-
s+
s-
s+
s-
s+
s-
s+
s-
s+
s-
s+
s-
s+
z- is delayed by the new transition s- !

yz=1yz=0
1001 1011
1000
1010
0001
0000 0101
0010 0100
0110 0111
0011
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
C
C
x
y
x
y
w
z
x
y
z
w
z
w
z
yyyyyyy
1001 1011
1000
1010
0001
0000 0101
0010 0100
0110 0111
0011
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+

Signal insertion for function F
State Graph
F=0 F=1
Insertion by input borders
F-
F+

Event insertion
a b
ER(x)
cx x x x
b
SR(x)
a

Properties to preserve
a
a
b
b
a
a
b
b
a
a
b
b
xx
a
a
b
b
a
a
b
b
ba
a
b
b
xx
xx
a ispersistent
a is disabled by b
= hazards

Interactive design flow
Petri Net
(STG)
Transition
System
Transition
System
Reachability analysis
Transformations + Synthesis
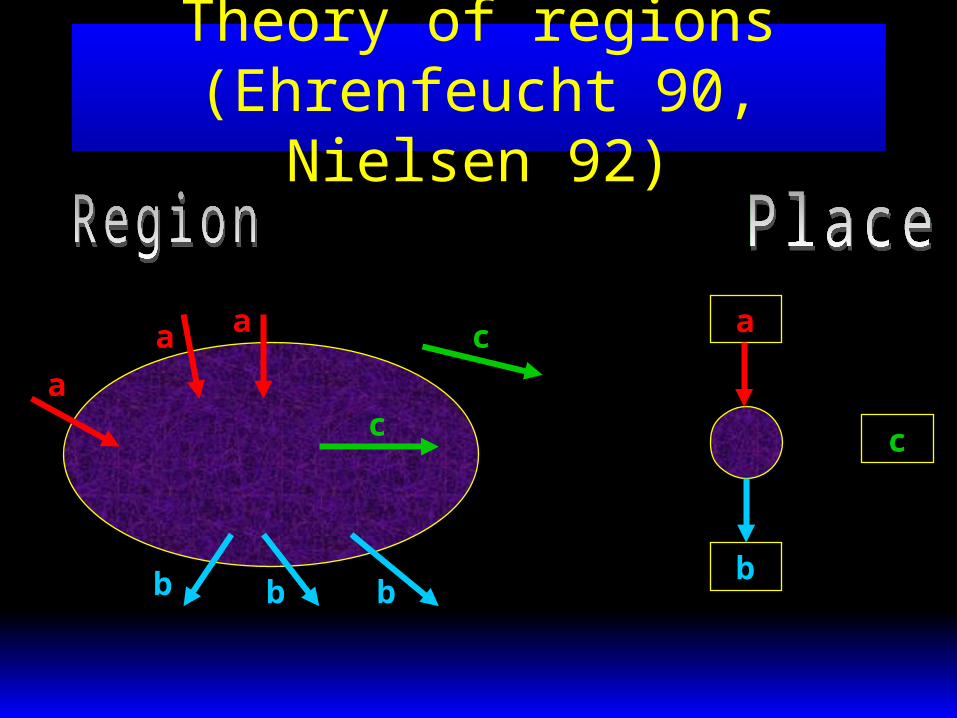
Theory of regions(Ehrenfeucht 90, Nielsen 92)
a
a a
b b b
c
c a
b
c

Synthesis of Petri Nets
a
a
b
bb
c
c
ca
b c

Excitation closure
a
a
b
bb
c
c
c
b c
a

b
bb
b
Label splitting
a
c c
d
d
d
d
a
b
b
c
d

Formal verification
Implementability properties– Consistency, persistency, state coding …
Behavioral properties (safeness, liveness)– Mutual exclusion, “ack” after “req”, …
Equivalence checking– Circuit Specification– Circuit < Specification

Property verification: consistencyd+
a+
b+
c- a-
b- d-
c+
Specification
a+ a-
Property
Failure if a+ enabled in specification anda- enabled in property (or viceversa)

Correctness: environment circuit
d+
a+
b+
c- a-
b- d-
c+a
b
c
d
Environment
Circuit
Failure: circuit produces anevent unexpected (not enabled)by the environment

Fighting the state explosion
Symbolic methods (BDDs) Partial order reductions Petri net unfoldings Structural theory (invariants)

Fighting with state explosion
p1
p2
p3
p1 p2 p3
p1 p2 p3p1 p2 p3
p1
p2 p2
p3 p3
0 1
01
00
00
1
1
1 1

Representing Markings
p1p2
p3
p4
p5 p0
p2 + p3 + p5 = 1p0 + p1 + p4 + p5 = 1
{ p0, p3 } v0 v1 v2 v3
p2 v0 v1
p3 v0 v1
p5 v0
p0 v2 v3
p1 v2 v3
p4 v2
Place encoding

Summary
Asynchronous design is applicable to– asynchronous interfaces– high-performance computing– low-power design– low-emission design
There is an increased interest of few, but large scale companies: Intel, Philips, Sun, Sharp, ARM, HP, Cogency

Summary (continued)
Asynchronous circuits are more difficult to design than synchronous
Formal models and CAD support are essential
Petri nets have been one of the most successful formalisms for modeling asynchronous circuits
Most steps of the design process covered by this tutorial are supported by the tool Petrify


















