Artificial Neural Network-Based Voltage Control of DC/DC ...
6
This paper has been accepted for publication at the 6th IEEE Workshop on the Electronic Grid (eGrid 2021) 1 Artificial Neural Network-Based Voltage Control of DC/DC Converter for DC Microgrid Applications Hussain Sarwar Khan * , Ihab S. Mohamed † , Kimmo Kauhaniemi * , and Lantao Liu † * School of Technology and Innovations, University of Vaasa, Vaasa, Finland † Luddy School of Informatics, Computing, and Engineering, Indiana University, Bloomington, IN 47408, USA Abstract—The rapid growth of renewable energy technology enables the concept of microgrid (MG) to be widely accepted in the power systems. Due to the advantages of the DC distribution system such as easy integration of energy storage and less system loss, DC MG attracts significant attention nowadays. The linear controller such as PI or PID is matured and extensively used by the power electronics industry, but their performance is not optimal as system parameters are changed. In this study, an artificial neural network (ANN) based voltage control strategy is proposed for the DC–DC boost converter. In this paper, the model predictive control (MPC) is used as an expert, which provides the data to train the proposed ANN. As ANN is tuned finely, then it is utilized directly to control the step-up DC converter. The main advantage of the ANN is that the neural network system identification decreases the inaccuracy of the system model even with inaccurate parameters and has less computational burden compared to MPC due to its parallel structure. To validate the performance of the proposed ANN, extensive MATLAB/Simulink simulations are carried out. The simulation results show that the ANN-based control strategy has better performance under different loading conditions comparison to the PI controller. The accuracy of the trained ANN model is about 97%, which makes it suitable to be used for DC microgrid applications. Index Terms—ANN, DC Microgrid, DC/DC boost converter, MPC, Primary control. I. I NTRODUCTION Renewable energy got attention due to the depletion of fossil fuels and global warming. Due to this, the use of DC/DC converters is rapidly increasing in a vast amount of appli- cations such as wind turbines, photovoltaic systems, electric vehicles, energy storage systems, and in such applications, where different voltage levels loads are connected [1]–[3]. The block diagram of DC MG is expressed in Fig. 1. DC MG mainly includes renewable energy sources (RES) such as solar and wind, energy storage system (ESS), and DC load. Every RES and ESS is connected with the bus through a power electronic interface (PEI). It is therefore necessary to have effective control for the PEIs. The research community ex- tensively proposes different types of linear controllers such as proportional–integral (PI) and proportional–integral–derivative (PID) and is vastly used by the PE industry [4]–[6]. However, the linear controller has its practical limitations such as tuning of gains, poor disturbance rejection capability, shifting of the operating point of the converter towards instability due to change of the system parameters, and lacking the capacity to e-mails in-order: [email protected], [email protected], [email protected], [email protected] Corresponding authors: Hussain Sarwar Khan and Ihab S. Mohamed handle the non-linearities of the power system. Many nonlinear control techniques such as model predictive control (MPC), sliding mode control (SMC), fuzzy-logic control (FLC) have been proposed to cope with the issues mentioned above and also try to improve the transient behavior. In [7], FLC for DC converter is presented for PV-based lighting systems. FLC implementation for DC power converter using microcontroller has been studied in [8]. FLC basically works on the if-else statement, and its response depends upon predefined rules us- ing if-else logic. FLC does not need any mathematical system model and also has the ability to handle the non-linearity of the system. Voltage regulation of FLC for DC/DC converter is also good under different conditions. However, many studies prove it as an unreliable controller because it lacks formal analysis. So, the amalgam of varying control techniques is found in the literature to balance the disadvantages of FLC [9]. DC/DC Converter Solar Energy System DC/DC Converter Wind Energy System DC Bus Bidirectional DC/DC Converter Super Capacitor Bidirectional DC/DC Converter Battery DC Load Fig. 1. Possible structure of single bus DC MG, including renewable energy sources such as solar and wind, energy storage systems, and DC load. Slide mode control and model predictive control are devel- oped and vastly studied in literature and have become promis- ing solutions for power electronic converter applications. Slide mode control is based on variable structure control theory. Its basic principle is divided into two stages. The system state trajectory is forcefully taken into the user-defined sliding layer. This phase is known as the reaching phase, then in the second phase, which is known as the sliding phase, state trajectories remain within the layer, defined by the user on the base of ap- arXiv:2111.03207v1 [eess.SY] 5 Nov 2021
Transcript of Artificial Neural Network-Based Voltage Control of DC/DC ...

This paper has been accepted for publication at the 6th IEEE Workshop on the Electronic Grid (eGrid 2021)1
Artificial Neural Network-Based Voltage Control ofDC/DC Converter for DC Microgrid Applications
Hussain Sarwar Khan∗, Ihab S. Mohamed†, Kimmo Kauhaniemi∗, and Lantao Liu†∗School of Technology and Innovations, University of Vaasa, Vaasa, Finland
†Luddy School of Informatics, Computing, and Engineering, Indiana University, Bloomington, IN 47408, USA
Abstract—The rapid growth of renewable energy technologyenables the concept of microgrid (MG) to be widely accepted inthe power systems. Due to the advantages of the DC distributionsystem such as easy integration of energy storage and less systemloss, DC MG attracts significant attention nowadays. The linearcontroller such as PI or PID is matured and extensively usedby the power electronics industry, but their performance is notoptimal as system parameters are changed. In this study, anartificial neural network (ANN) based voltage control strategy isproposed for the DC–DC boost converter. In this paper, the modelpredictive control (MPC) is used as an expert, which providesthe data to train the proposed ANN. As ANN is tuned finely, thenit is utilized directly to control the step-up DC converter. Themain advantage of the ANN is that the neural network systemidentification decreases the inaccuracy of the system model evenwith inaccurate parameters and has less computational burdencompared to MPC due to its parallel structure. To validate theperformance of the proposed ANN, extensive MATLAB/Simulinksimulations are carried out. The simulation results show thatthe ANN-based control strategy has better performance underdifferent loading conditions comparison to the PI controller. Theaccuracy of the trained ANN model is about 97%, which makesit suitable to be used for DC microgrid applications.
Index Terms—ANN, DC Microgrid, DC/DC boost converter,MPC, Primary control.
I. INTRODUCTION
Renewable energy got attention due to the depletion of fossilfuels and global warming. Due to this, the use of DC/DCconverters is rapidly increasing in a vast amount of appli-cations such as wind turbines, photovoltaic systems, electricvehicles, energy storage systems, and in such applications,where different voltage levels loads are connected [1]–[3].The block diagram of DC MG is expressed in Fig. 1. DCMG mainly includes renewable energy sources (RES) suchas solar and wind, energy storage system (ESS), and DC load.Every RES and ESS is connected with the bus through a powerelectronic interface (PEI). It is therefore necessary to haveeffective control for the PEIs. The research community ex-tensively proposes different types of linear controllers such asproportional–integral (PI) and proportional–integral–derivative(PID) and is vastly used by the PE industry [4]–[6]. However,the linear controller has its practical limitations such as tuningof gains, poor disturbance rejection capability, shifting of theoperating point of the converter towards instability due tochange of the system parameters, and lacking the capacity to
e-mails in-order: [email protected], [email protected],[email protected], [email protected] Corresponding authors: Hussain Sarwar Khan and Ihab S. Mohamed
handle the non-linearities of the power system. Many nonlinearcontrol techniques such as model predictive control (MPC),sliding mode control (SMC), fuzzy-logic control (FLC) havebeen proposed to cope with the issues mentioned above andalso try to improve the transient behavior. In [7], FLC forDC converter is presented for PV-based lighting systems. FLCimplementation for DC power converter using microcontrollerhas been studied in [8]. FLC basically works on the if-elsestatement, and its response depends upon predefined rules us-ing if-else logic. FLC does not need any mathematical systemmodel and also has the ability to handle the non-linearity of thesystem. Voltage regulation of FLC for DC/DC converter is alsogood under different conditions. However, many studies proveit as an unreliable controller because it lacks formal analysis.So, the amalgam of varying control techniques is found in theliterature to balance the disadvantages of FLC [9].
DC/DCConverter
Solar Energy SystemDC/DC
Converter
Wind Energy System
DCBus
BidirectionalDC/DC Converter
SuperCapacitor
BidirectionalDC/DC Converter Battery
DC Load
Fig. 1. Possible structure of single bus DC MG, including renewable energysources such as solar and wind, energy storage systems, and DC load.
Slide mode control and model predictive control are devel-oped and vastly studied in literature and have become promis-ing solutions for power electronic converter applications. Slidemode control is based on variable structure control theory. Itsbasic principle is divided into two stages. The system statetrajectory is forcefully taken into the user-defined sliding layer.This phase is known as the reaching phase, then in the secondphase, which is known as the sliding phase, state trajectoriesremain within the layer, defined by the user on the base of ap-
arX
iv:2
111.
0320
7v1
[ee
ss.S
Y]
5 N
ov 2
021

2
DC/DC Inverter DC-Load
MPC
Supe
rvis
edLe
arni
ng
Proposed Neural Network
Training Phase (Off-line)
ANN-Based Control Strategy
Test Phase (Online)
DC/DC Inverter DC-Load
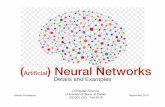
Fig. 2. Overview of the proposed control strategy. During the training phase, the classical MPC is used to control the DC/DC converter and collect thetraining data. In the test phase, the trained ANN is implemented to control the voltage of the converter instead of MPC [10].
plication. It has better performance, robust against parametricvariations, and possesses magnificent transient response underdifferent loading conditions. Still, chattering phenomena, highswitching losses, and complex mathematical modeling are themain barriers to its implementation [11], [12].
MPC is a digital control method, and its basic principle isdifferent from linear control. It uses the discrete-time modelof the converter along with its filter to anticipate the behaviorfor all possible input combinations. One of the inputs havingthe least (i.e., optimal) value of the predefined cost function(CF) is selected and applied to the coming sampling instantdespite drafting a separate loop for each controlled variableand cascading them together as in the case of linear controllers[13]. CF is basically a square of the Euclidean distancebetween controlled and reference signals. However, it has ahigh computational burden, and its performance depends uponthe mathematical model of the system and also has variableswitching frequency; however, many new studies proposed aconstant switching frequency based MPC for different powerelectronic applications [12], [14], [15].
Data-driven or model-free control techniques and especiallyANN-based methods are growing in the domain of powerconverters [16]. An ANN-based control scheme has beenproposed in [10] to directly control a three-phase inverter withan output LC filter, where a lower THD and a better steadyand dynamic performance are achieved. Similarly, authors in[17] proposed an ANN-based control strategy for a three-phaseflying capacitor multi-level inverter (FCMLI). In [18], a neuralnetwork predictive-based voltage control is proposed for theDC/DC buck converter. The author used PID controller datato train NN. After training, neural network predictive control(NNPC) is used to regulate the voltage. NNPC controller forgrid-connected synchronverter is proposed in [19].
Broadly speaking, the ANN-based controllers are better as
compared to other controllers due to the following reasons[10], [20]:
• They do not require an explicit mathematical model ofthe system.
• Their performance is better if they are finely tuned withsufficient data and properly chosen input features [17].
• They can be designed without having expert knowledge.
This paper proposes an artificial neural network-based volt-age control for a DC/DC step-up (i.e., Boost) converter for DCmicrogrid applications. Initially, MPC-based voltage controlis implemented for the Boost converter to extract the inputfeatures data. After the extraction of required data, a differentpossible combinations of inputs features are chosen. Finally,the voltage reference, inductor current, and capacitor voltageare selected as input features, while the converter switchingstate is taken as output feature for the proposed ANN in thisstudy, as illustrated in Fig. 4. Then, these combinations areused to train the ANN. Once the ANN is trained and has goodmodel accuracy, the ANN model is directly used to generatethe optimal switching state for the DC converter. Figure 2illustrates the overview of the proposed control strategy: thetraining phase combines using MPC to anticipate the converteroutput voltage converter and collection of state variables dataunder full-state observation. The collected data is used totrain the ANN. In the test phase, the trained neural networkis employed online to control the converter’s output voltageinstead of MPC. The simulation results of the proposed controlstrategy are also compared with the traditional PI Controller.
The rest of the paper is organized as follows. The math-ematical modeling of the DC/DC boost converter and thebasic principle of MPC are explained in Section II. While theproposed ANN and its training procedure are elaborated inSection III. Section IV shows the simulation results for bothANN and PI controllers. Then, future work is discussed in

3
Section V. Finally, Section VI presents the conclusion.
L il R D
S CfVc−+ Vin VdcLoad
Fig. 3. Circuit diagram of the DC/DC converter.
II. MATHEMATICAL MODELLING OF MPCFigure 3 illustrates the circuit diagram of the simple step-
up boost converter, where S is a controllable switch, R is thedamping resistance, the current through the inductor L is il,and the voltage across the capacitor Cf is Vc. Vin representsthe input voltage of the DC source. The second order lowpass filter is used to attenuate the ripples and distortion. Inorder to implement the MPC, it is necessary to develop thediscrete time model of the DC converter. The output voltageof the step-up DC converter, namely, Vc, is controlled byvarying the duty cycle of pulse width modulation (PWM)signal. But in the case of MPC, the pulse for the switch isdirectly generated by the MPC. One of the major drawbacks ofMPC is its variable switching frequency. Equation (1) explainsthe inductive nature, while (2) presents the capacitive behaviorof the system:
dil(t)
d(t)= −R
Lil(t)−
Vc(t)
L+
Vc(t)
Lu(t) +
Vin
L, (1)
dVc(t)
d(t)=
1
CfiL(t)− 1
CfiL(t)u(t)− 1
RCfVc(t). (2)
The switch states, S, are defined by function u(t), as shownin (3). If S = 1, then switch S is in ON state and if switchS = 0, then switch S is in OFF state.
u(t) =
1, if S = 1
0, if S = 0(3)
The discrete-time model of the DC converter is expressed in(4) and (5). These equations are used to anticipate the futureresponse of voltage and current.
il(k + 1) =
(TR
L− 1
)il(k) + (u(k)− 1)
T
LVc(k) (4)
Vc(k + 1) =T
Cfil(k) +
(1− T
CfR
)Vc(k)− T
Cfil(k)u(k)
(5)Where k+1 represents the future or next (coming) instant andT is the sampling time.
The formulation of cost function (CF) is an essential part ofthe development of MPC, and it is the positive value of errorbetween the reference and actual value of the state parameter.The CF, J , chosen in this study is illustrated in (6), where V ∗
c
is the reference output voltage.
J(k) =(V ∗c (k + 1)2 − Vc(k + 1)
)2(6)
The execution of the MPC algorithm can be summarized asfollows:
• At the start of the switching instant, the voltage andcurrent of the converter are measured using sensors.
• Equations (4) and (5) are used to predict the current andvoltage at instant k + 1 for all possible switching states,and then the CF is evaluated using (6) for all possiblestates. In this study, N is taken as one. So, there is onlytwo possible switching states.
• The switching state that minimizes the CF is applied tothe converter at the next time instant k + 1.
III. PROPOSED ANN-BASED CONTROL STRATEGY
Basically, ANN is a network that has one or more hiddenlayers and each layer has one or multiple neurons which makesthe ANN response similar to the real neural network. In thisstudy, the feed-forward ANN is used, which is called FF-ANN.In FF-ANN, the data moves in forward direction only. Theoutput of single neuron is mathematical expressed as:
y = Act
(b +
M∑i=1
xiwi
), (7)
where Act(.), wi, b, and M are the activation function,weights of each input xi, bias or correction factor, andnumber of input elements (or neurons) where the input featuresx = x1, x2, . . . , xM, respectively. The most commonly usedtypes of activation functions are given in Table I. By joiningthe multiple neurons into a single layer, an FF-ANN layer canbe developed. The general equation used to compute the outputof the multi-input single-output FF-ANN can be expressed as:
y1 = Act
J∑j=1
2wj1hj + 2b1
, and
hj = Act
(M∑
m=1
1wmjxm + 1bj
), ∀j = 1, . . . , J,
(8)
where y1 is the output of the ANN, (1wmj ,2wj1) represent
the weights of the hidden and output layers, J represents thenumber of hidden layers, M represents the number of inputneurons, and (1bj ,
2b1) refer to the biases of the hidden andoutput layers, respectively.
Table IACTIVATION FUNCTION TYPES.
Act(.) ≡ f(x) Definition
Sigmoid f(x) = 11+e−x
Hyperbolic Tangent (tanh) f(x) = ex−e−x
ex+e−x
Rectified Linear f(x) =
0 x ≤ 0
x x > 0
Binary Step f(x) =
0 x < 0
1 x > 0

4
...x1
V ∗c
x2Vc
x3il
h1
1b1
hJ
1bJ
y1Sopt
2b1
1w11
1w1J
1w31
1w3J
2w11
2wJ1
ANN-Based Control Strategy
DC/DCConverter
Fig. 4. Block diagram of the proposed ANN-based control scheme for theDC/DC converter. It is trained to map directly from the measured variables,namely, V ∗
c , Vc, and il, to the optimum switching state Sopt.
Figure 4 demonstrates the proposed ANN-based controlstrategy used in this study. The accuracy of MPC dependson the mathematical modeling of the system. However, theproposed control scheme does not need the model of thesystem, but it requires the training dataset. It maps directlyfrom the raw input features to the desired outputs. Therefore,the performance of the ANN does not depend upon the systemmodel or its parameter. In this work, the reference voltageV ∗c , capacitor voltage Vc and inductor current il are chosen as
the input features of the trained ANN-based control strategy,while the optimal switching state Sopt is considered as itstarget or output. Initially, the MPC algorithm is simulated toextract the training data, which consists of the input featuresand the corresponding output, i.e., input-output pairs. Then,the extracted data is used to train the ANN. In our case, thetotal number of training data samples is 30001. The control-loop of the proposed ANN-based control strategy, at instant kis summarized as follows:
1) Initially, measure il and Vc at instant k.2) Those measured variables, along with the reference
value V ∗c , are utilized by our proposed controller to
directly predict the optimal switching state Sopt.3) Then, the optimal switching state is directly applied to
the converter without using any modulator.
A grid search tuning method is used for the selection ofconfiguration with 15 neurons. Bayesian regularized technique(BRT) is used to train the ANN and adjust the biases andweights. BRT is more robust than standard propagation meth-ods and can reduce or eliminate the need for lengthy cross-validation [21]. In this research work, 60% of the randominput data is used to train the ANN, while 20% is usedfor testing and 20% validation. Figure 5 presents the overallconfusion matrix, which is used to analyze the accuracy ofthe trained ANN. The correct classification of the data classis presented in the diagonal entries of the matrix, while otherentries show the incorrect classification of the data. The trainedANN that has been used, in this study, has an accuracy of97%. The trained ANN model is exported to Simulink to test
0 1
0
1
634221.1%
8252.7%
88.5%11.5%
00.0%
2283476.1%
100%0.0%
100%0.0%
96.5%3.5%
97.3%2.7%
Target Class
Out
put
Cla
ss
Fig. 5. Confusion matrix of the trained ANN based on the overall trainingdata, where the correct and incorrect observations are highlighted in greenand red, respectively.
Start
Define input-output pairs
Dataset extraction from RT simulation
Dataset distributionTraining = 60%Testing = 20%
V alidation = 20%
Define No. of hidden layers
Choose training method(Bayesian technique)
Check MSE&
confusion matrix
Control the DC/DC inverterusing the trained ANN
Adjust No. ofhidden layers
Performance check
Stop
FALSE
FALSE
TRUE
TRUE
Trai
ning
Phas
e(O
fflin
e)Te
stPh
ase
(Onl
ine)
Fig. 6. Main steps of deploying the ANN-based control strategy for theDC/DC converter.

5
its performance under the original scenario. To sum up, thecomplete procedure of the learning-based control strategy isillustrated in Fig. 6, highlighting the main steps of the trainingand test phases.
IV. SIMULATION RESULTS
The trained ANN model is exported into the Simulinkmodel of the DC/DC converter to validate and verify theperformance of the proposed control strategy. Extensive MAT-LAB/Simulink simulation is carried out. The performanceof the boost converter with the proposed control scheme isinvestigated under normal load and step change of load. Thesimulation parameters of the converter are given in Table II.
Table IISIMULATION PARAMETERS.
Parameter ValueDC Input Vin 70 [V]Inductor value L 10× 10−3 [H]Resistance Value R 80× 10−3 [Ω]Capacitor Cf 100 [mF]Load P 0−1500 [W]PI Parameter Kp,Ki 0.054, 8.86Switching Frequency 20 [kHz]
Figure 7 illustrates the performance of our proposed controlstrategy, considering normal load conditions. The simulationstarts at t = 0 s, where a resistive load of 20 Ω is connectedwith the system. The reference voltage is set to 95 V. Initially,the system takes around 20 ms to reach the reference value.After a transient period, the output voltage and current waveforms remain stable and do not show distortion. Figure 8
Fig. 7. Simulation results of the output voltage and current of the DC boostconverter under normal load conditions.
shows the performance of the proposed controller from fullload to no-load condition and vice versa. At t = 0.4 s, theload is disconnected from the system; i.e., the converter isunder no-load condition. It is observed that the voltage remainsstable, and the current becomes zero. While at t = 0.5 s, theload is again connected to the system. The voltage remains
stable, while the current is increased to 4.9 A. However, thereis no transient observed in the simulation. After the intervalof 0.6 s, further loads are added into the system to investigatethe response of the proposed controller. It is observed fromFig. 8 that with increasing the load, the voltage remains stablewhile keeping track of the reference value with un-noticeabledistortion, demonstrating the superior performance of theproposed ANN-based control scheme under different loadingand transient conditions. Figure 9 presents the simulation
Fig. 8. Simulation results of the output voltage and current of the DC boostconverter under full load to no-load test.
Fig. 9. Simulation results of the output voltage and current of the DC boostconverter using PI and ANN-based controllers under step change of load.
results of our proposed controller under step change of load. Att = 0.5 s, the DC load becomes double. We can observe thatthe voltage remains stable without any distortion, whereas thecurrent increases with the increase of load. However, the cur-rent waveform becomes stable with almost no transient time.Figure 9 also presents a comparison with the PI controller. Un-der the transient period, the PI controller shows an overshoot

6
in the voltage and current which may harm the switch of theDC/DC converter; accordingly, a high rating semi-conductorswitch is required which increases the converter cost. TheANN-based control scheme has better wave quality and lessdistortion compared to the PI controller. Moreover, the outputcurrent of the PI-based controlled converter is distorted, whilethe current wave in the case of ANN is constant, stable, andhas less loss compared to the PI controller.
V. DISCUSSION AND FUTURE WORK
In this study, our proposed control strategy is trained on asingle reference value (i.e., V ∗
c = 95 V) and also tested on thesame reference value under different loading conditions. In thefuture work, the proposed ANN model will be trained and itsperformance will be examined on different reference values.Moreover, it will be trained on various parameters such as filtervalues, switching frequency, etc, proposing a more genericcontrol strategy. We have also observed that the performanceof our proposed controller is similar to the MPC used to extractthe training data. For this reason, the comparison is carried outwith the PI controller. However, the ANN-based controller hasan advantage over MPC as it has less computation burden andconstant switching frequency.
VI. CONCLUSION
Within this work, we proposed a feed-forward artificialneural network-based voltage control strategy for the DC/DCstep-up converter. Model predictive control is implemented toextract the training data, where the data is used, later on, totrain the ANN offline. After training the ANN properly, MPCis removed and the trained ANN successfully regulates thevoltage of the DC/DC converter as per reference voltage. Thebayesian regularized technique is used to train the ANN andadjust the biases and weights of the ANN. Different typesof tests were also performed during simulation, such as stepchange of load, the shift of load from full load to no load,and vice versa, in order to demonstrate the performance of theproposed controller. It has been observed through simulationresults that the overall performance of the proposed controlscheme is better than the classical linear controllers. Theimplementation of the proposed technique would be usefulin DC microgrid applications, where the DC boost convertersrequire high accuracy for tuning controller parameters.
VII. ACKNOWLEDGMENT
This work is carried out by the financial support providedby the Walter Ahlstrom Foundation Finland with grant No.2021/40. Some parts of this work are done in the SolarXresearch project with the financial support provided by Busi-ness Finland with Grant No. 6844/31/2018. The financialsupport provided through these funding organizations is highlyacknowledged.
REFERENCES
[1] H. S. Khan, M. Aamir, K. Kauhaniemi, M. Mumtaz, M. W. Hassan,and M. Ali, “Improved finite control set model predictive control fordistributed energy resource in islanded microgrid with fault-tolerancecapability,” Engineering Science and Technology, an International Jour-nal, vol. 24, no. 3, pp. 694–705, 2021.
[2] H. S. Khan, M. Aamir, M. Ali, A. Waqar, S. U. Ali, and J. Imtiaz, “Finitecontrol set model predictive control for parallel connected online UPSsystem under unbalanced and nonlinear loads,” Energies, vol. 12, no. 4,p. 581, 2019.
[3] B. Sahu and G. A. Rincon-Mora, “A low voltage, dynamic, noninvert-ing, synchronous buck-boost converter for portable applications,” IEEETransactions on power electronics, vol. 19, no. 2, pp. 443–452, 2004.
[4] K. Hwu and Y. Yau, “Performance enhancement of boost converter basedon PID controller plus linear-to-nonlinear translator,” IEEE transactionson power electronics, vol. 25, no. 5, pp. 1351–1361, 2009.
[5] C.-F. Hsu, I.-F. Chung, C.-M. Lin, and C.-Y. Hsu, “Self-regulating fuzzycontrol for forward DC–DC converters using an 8-bit microcontroller,”IET Power Electronics, vol. 2, no. 1, pp. 1–13, 2009.
[6] I. S. Mohamed, S. A. Zaid, M. Abu-Elyazeed, and H. M. Elsayed, “Clas-sical methods and model predictive control of three-phase inverter withoutput LC filter for UPS applications,” in 2013 International Conferenceon Control, Decision and Information Technologies (CoDIT). IEEE,2013, pp. 483–488.
[7] T.-F. Wu, C.-H. Chang, and Y.-H. Chen, “A fuzzy-logic-controlledsingle-stage converter for PV-powered lighting system applications,”IEEE Transactions on Industrial Electronics, vol. 47, no. 2, pp. 287–296,2000.
[8] T. Gupta, R. Boudreaux, R. M. Nelms, and J. Y. Hung, “Implementationof a fuzzy controller for DC-DC converters using an inexpensive 8-bmicrocontroller,” IEEE transactions on Industrial Electronics, vol. 44,no. 5, pp. 661–669, 1997.
[9] S. J. Jawhar, N. Marimuthu, and N. A. Singh, “An neuro-fuzzy controllerfor a non linear power electronic boost converter,” in 2006 InternationalConference on Information and Automation. IEEE, 2006, pp. 394–397.
[10] I. S. Mohamed, S. Rovetta, T. D. Do, T. Dragicevic, and A. A. Z. Diab,“A neural-network-based model predictive control of three-phase inverterwith an output LC filter,” IEEE Access, vol. 7, pp. 124 737–124 749,2019.
[11] S. Oucheriah and L. Guo, “PWM-based adaptive sliding-mode controlfor boost DC–DC converters,” IEEE Transactions on industrial electron-ics, vol. 60, no. 8, pp. 3291–3294, 2012.
[12] H. S. Khan, K. S. Fuad, M. Karimi, and K. Kauhaniemi, “Fault currentlevel analysis of future microgrids with high penetration level of powerelectronic-based generation,” in 2021 IEEE 9th International Conferenceon Smart Energy Grid Engineering (SEGE). IEEE, 2021, pp. 48–53.
[13] I. S. Mohamed, S. A. Zaid, M. Abu-Elyazeed, and H. M. Elsayed, “Im-proved model predictive control for three-phase inverter with output LCfilter,” International Journal of Modelling, Identification and Control,vol. 23, no. 4, pp. 371–379, 2015.
[14] P. Karamanakos, T. Geyer, and S. Manias, “Direct voltage control ofDC–DC boost converters using enumeration-based model predictivecontrol,” IEEE transactions on power electronics, vol. 29, no. 2, pp.968–978, 2013.
[15] L. Cheng, P. Acuna, R. P. Aguilera, J. Jiang, S. Wei, J. E. Fletcher, andD. D. Lu, “Model predictive control for DC–DC boost converters withreduced-prediction horizon and constant switching frequency,” IEEETransactions on Power Electronics, vol. 33, no. 10, pp. 9064–9075,2017.
[16] B.-R. Lin, “Power converter control based on neural and fuzzy methods,”Electric power systems research, vol. 35, no. 3, pp. 193–206, 1995.
[17] P. B. Malidarreh, A. Bakeer, I. S. Mohamed, and L. Liu, “An artificialneural network-based model predictive control for three-phase flyingcapacitor multi-level inverter,” arXiv preprint arXiv:2110.08101, 2021.
[18] S. Saadatmand, P. Shamsi, and M. Ferdowsi, “The voltage regulation ofa buck converter using a neural network predictive controller,” in 2020IEEE Texas Power and Energy Conference (TPEC). IEEE, 2020, pp.1–6.
[19] S. Saadatmand, M. S. S. Nia, P. Shamsi, M. Ferdowsi, and D. C.Wunsch, “Neural network predictive controller for grid-connected virtualsynchronous generator,” in 2019 North American Power Symposium(NAPS). IEEE, 2019, pp. 1–6.
[20] S. Zhao, F. Blaabjerg, and H. Wang, “An overview of artificial intelli-gence applications for power electronics,” IEEE Transactions on PowerElectronics, 2020.
[21] F. D. Foresee and M. T. Hagan, “Gauss-newton approximation tobayesian learning,” in Proceedings of international conference on neuralnetworks (ICNN’97), vol. 3. IEEE, 1997, pp. 1930–1935.