Application of Fourier Transform in Agriculture (Robotic Cultivators Technology)
21
Seminar Application of Fourier Transform in Agriculture
-
Upload
eisha-razia -
Category
Science
-
view
46 -
download
3
Transcript of Application of Fourier Transform in Agriculture (Robotic Cultivators Technology)

Seminar
Application of Fourier Transform in Agriculture

Agriculture
• Agriculture plays one of the most important roles in economy.
• Therefore, lowering costs and improving quality of agricultural products is highly demanded.

One of the Most Important and Expensive Labor
• Controlling Weedsthrough
Hand/Human laboroCostlyoTime consuming
HerbicidesoCostlyoPollution causing
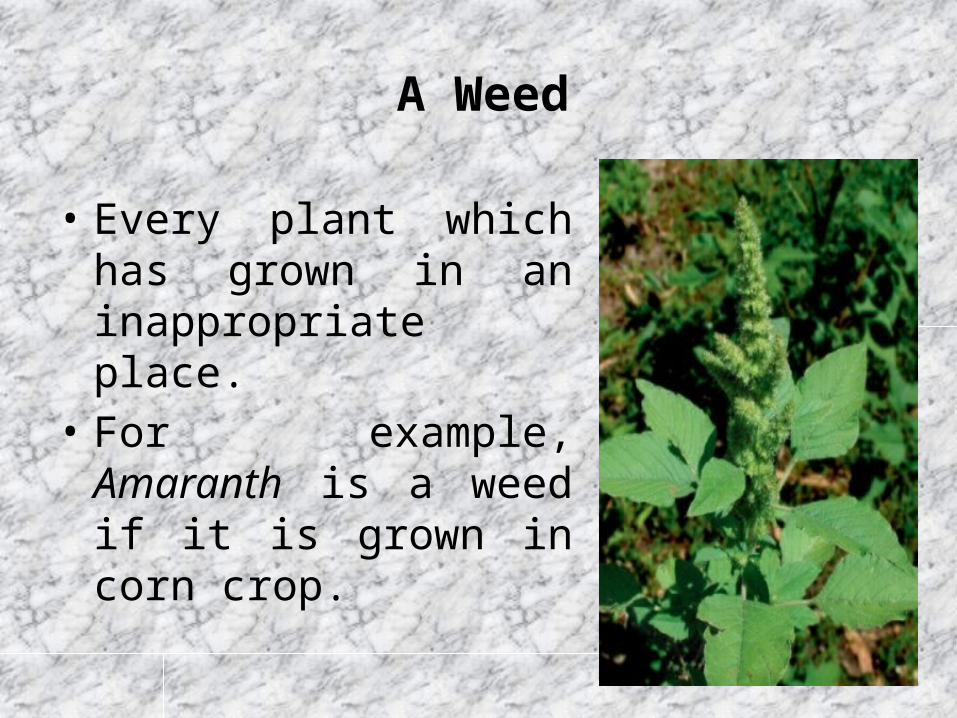
A Weed
• Every plant which has grown in an inappropriate place.
• For example, Amaranth is a weed if it is grown in corn crop.

Alternative to Hand Labor and Herbicides
• Robotic Cultivators
Armed withDigital
Camera

Basic Target of Robotic Cultivator
• Instantaneous weed detection and removal
o Weed detectionby
classifying between weeds and crops based on captured image
o Weed removalby
spraying herbicide accurately on the weed cutting with blades damaging with electric shock devices

How Robotic Cultivators Work?
• It has digital camera fitted in it.• Camera captures images of weed
and crop.• Classify between weed and crop
using those images.• If it is of weed then robot removes it
otherwise it leaves the crop.
Techniques Used for Weeds Detection
• Robotic weed control system for tomatoes• Computer vision based methods for
detecting weeds in lawns• Fourier Transform-Computers

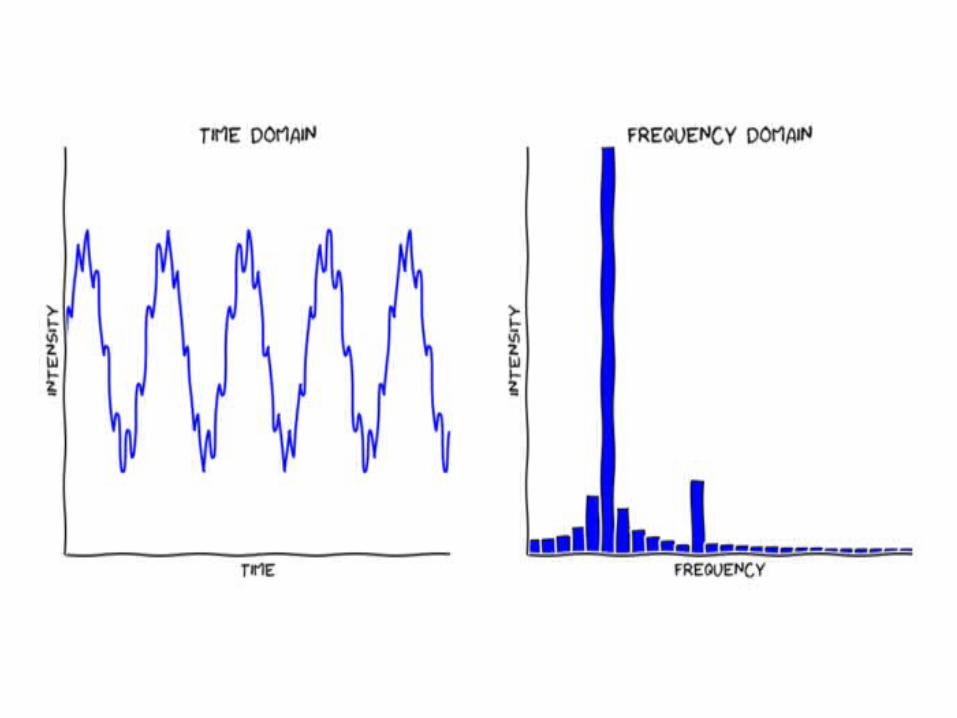
Fourier Transform
• Fourier Transform:
converts a function from the time domain to the frequency domain

Forward Fourier Transform
• From time domain to frequency domain
f(u,v) t
t(x,y)kernel

Inverse Fourier Transform
• From frequency domain to time domain
t(x,y) f
kernel

Transform Kernel
Basic Process for Weed Detection
• Pre-Processing (Edge Detection)• Frequency and Density Filtering
(Fourier Transform in Frequency Filtering)• Post-Processing (Classification errors
are detected, merging results of both frequency and density filters)

Phase of Frequency Filtering
• Image of plant (weed/crop) after edge detection is gone through frequency filtering.
• A grid is applied on that image, on each block of grid, Fourier transform is applied.
• The output will be in frequency domain, which will be provided to computational area of robotic cultivator.

Further Process
• Density Filtering• Post-Processing
– Detection of classification errors– Merging the results of both frequency filtering
(which is done using Fourier Transform) and density filters.

Output
Resulting output will be a matrix(Weed Location)
Application Compiled to DLL
• The resulting application after being computed to Dynamic Linked Library (dll) used in a Graphical User Interface (GUI)– May be in C#.NET based GUI

Overview

Experiment
• An experiment was done, in which this algorithm was used in a weeding robot built in Mechanical Department of Shiraz University in Iran, for being tested in an actual corn field.
• Results showed more than 92% accuracy in detecting weed plants.

Thank You!


















