Application of Advanced Motion Control Techniques and the ...
6
Application of Advanced Motion Control Techniques and the Prospect of Super Capacitors in Electric Vehicles Yoichi Hori Institute of Industrial Science University of Tokyo 4-6-1, Komaba, Meguro, Tokyo, 153-8505 Japan [email protected] http://mizugaki.iis.u-tokyo.ac.jp/ Abstract — With the advantages of high controllability of driven motors and high performance of novel electric energy storage devices, the control performance of electric vehicles can be improved dramatically. That has been demonstrated by the researches, which include 1)side slip angle estima- tion; 2)real-time smart speed pattern generator which real- izes ”easy driving” and ”smooth driving” on driver’s com- mand; 3)cooperative control of the hydraulic braking and the motor regenerative braking, which can get higher stabil- ity performance and higher energy efficiency; 4)optimal and dynamical driving force distribution control; 5)novel elec- tric vehicle powered only by electrical double layer capacitor and motion control used in this vehicle. ”UOT March II”, ”UOT Cadwell EV”, ”Capacitor COMS I” and ”Capacitor COMS II” are our experimental EVs for those mentioned researchers. Key Words : electric vehicle, motion control, side slip angle estimation, speed pattern, regenerative braking, super capacitor, force distribution control I. Introduction Electric vehicles (EVs) will be major vehicles in the mid- dle of the 21st century[1]. An outstanding advantage of EVs over traditional internal combustion engine vehicles (ICVs) is the controllability of the driven motors, which makes the EVs have the following merits for motion con- trol[2]. 1. Quick and accurate torque generation, for both accel- erating and decelerating. 2. Motor can be attached to installed into each wheel. 3. Motor torque is easily comprehensible. We mention our researchers on EVs as follows. In chapter II, we discuss the method of side slip angle estimation, which is used for vehicle motion control. In chapter III, we show a real time smart speed pattern gener- ator (RSSPG), which realizes ”easy driving” and ”smooth driving” on drivers command. Chapter IV mentions a cooperative control method of hydraulic braking and motor regenerative braking, which can also get higher stability performance. Regenerative braking is commonly adopted in EVs for energy efficiency. Furthermore, the generated torque of electric motors can be controlled much more quickly and precisely than that of hydraulic actuator. Chapter V introduces optimum force distribution con- trol. Optimally and dynamically distributing traction forces of four driving motors will generate the yaw moment. It can be used for EV maneuverability improvement. At last, in chapter VI, we introduce the development of a novel electric vehicle powered only by ”electrical double layer capacitor (EDLC)”. We call it ”capacitor COMS”. Applying new kind of electric energy storage devices is also an attractive researching topic in EV development ar- eas. ”UOT March II”, ”UOT Cadwell EV”, ”Capacitor COMS I” and ”Capacitor COMS II” are our experimen- tal EVs for those mentioned researchers. We use two-wheel model, which is shown in Fig.1, for the proposed observer. State equation is expressed in Eq.1. Output equation is shown in Eq.2. γ V y x P αr β δf αf lr lf 2Fr 2Ff l Fig. 1. Two-wheel model of vehicle motion ˙ x = Ax + Bu (1) A = [ −2(C f +Cr ) mv −2(l f C f −lr Cr) mv 2 − 1 −2(l f C f −l r C r ) I −2(l 2 f C f +l 2 r C r ) Iv ] B = [ 2C f mv 0 2l f C f I 1 I ] , x = [ β γ ] , u = [ δ f N ] y = Cx + Du (2) C = [ 0 1 va 11 v(a 12 + 1) ] , D = [ 0 0 vb 1 0 ] , y = [ γ a y ] To estimate β, we use full order observer, which is shown in Fig.2. ˙ ˆ x = Aˆ x + Bu − K( ˆ y − y) (3)
Transcript of Application of Advanced Motion Control Techniques and the ...

Application of Advanced Motion Control Techniques and the
Prospect of Super Capacitors in Electric Vehicles
Yoichi Hori
Institute of Industrial ScienceUniversity of Tokyo
4-6-1, Komaba, Meguro, Tokyo, 153-8505 [email protected]
http://mizugaki.iis.u-tokyo.ac.jp/
Abstract— With the advantages of high controllability ofdriven motors and high performance of novel electric energystorage devices, the control performance of electric vehiclescan be improved dramatically. That has been demonstratedby the researches, which include 1)side slip angle estima-tion; 2)real-time smart speed pattern generator which real-izes ”easy driving” and ”smooth driving” on driver’s com-mand; 3)cooperative control of the hydraulic braking andthe motor regenerative braking, which can get higher stabil-ity performance and higher energy efficiency; 4)optimal anddynamical driving force distribution control; 5)novel elec-tric vehicle powered only by electrical double layer capacitorand motion control used in this vehicle. ”UOT March II”,”UOT Cadwell EV”, ”Capacitor COMS I” and ”CapacitorCOMS II” are our experimental EVs for those mentionedresearchers.
Key Words : electric vehicle, motion control, side slip angleestimation, speed pattern, regenerative braking, super capacitor,force distribution control
I. Introduction
Electric vehicles (EVs) will be major vehicles in the mid-dle of the 21st century[1]. An outstanding advantage ofEVs over traditional internal combustion engine vehicles(ICVs) is the controllability of the driven motors, whichmakes the EVs have the following merits for motion con-trol[2].
1. Quick and accurate torque generation, for both accel-erating and decelerating.
2. Motor can be attached to installed into each wheel.3. Motor torque is easily comprehensible.We mention our researchers on EVs as follows.In chapter II, we discuss the method of side slip angle
estimation, which is used for vehicle motion control. Inchapter III, we show a real time smart speed pattern gener-ator (RSSPG), which realizes ”easy driving” and ”smoothdriving” on drivers command.
Chapter IV mentions a cooperative control method ofhydraulic braking and motor regenerative braking, whichcan also get higher stability performance. Regenerativebraking is commonly adopted in EVs for energy efficiency.Furthermore, the generated torque of electric motors canbe controlled much more quickly and precisely than thatof hydraulic actuator.
Chapter V introduces optimum force distribution con-trol. Optimally and dynamically distributing traction
forces of four driving motors will generate the yaw moment.It can be used for EV maneuverability improvement.
At last, in chapter VI, we introduce the development ofa novel electric vehicle powered only by ”electrical doublelayer capacitor (EDLC)”. We call it ”capacitor COMS”.
Applying new kind of electric energy storage devices isalso an attractive researching topic in EV development ar-eas.
”UOT March II”, ”UOT Cadwell EV”, ”CapacitorCOMS I” and ”Capacitor COMS II” are our experimen-tal EVs for those mentioned researchers.
We use two-wheel model, which is shown in Fig.1, forthe proposed observer. State equation is expressed in Eq.1.Output equation is shown in Eq.2.
γ
V
y
x
Pαrβδf
αf
lrlf
2Fr2Ff
l
Fig. 1. Two-wheel model of vehicle motion
x = Ax + Bu (1)
A =
[−2(Cf+Cr)
mv−2(lf Cf−lrCr)
mv2 − 1−2(lf Cf−lrCr)
I
−2(l2f Cf +l2rCr)
Iv
]
B =
[2Cf
mv 02lf Cf
I1I
], x =
[βγ
], u =
[δf
N
]
y = Cx + Du (2)
C =[
0 1va11 v(a12 + 1)
], D =
[0 0
vb1 0
], y =
[γay
]To estimate β, we use full order observer, which is shown
in Fig.2.
˙x = Ax + Bu − K(y − y) (3)

y = Cx + Du (4)
where the K is observer matrix gain.Based on consideration of pole assignment and robust-
ness against cornering power, K is decided as
K =
[λ1λ2Cf
(lf−lr)I2(lf2+lr2)+4lflr − 1 1
v
−λ1 − λ2m(lf2+lr2)(lf−lr)I
](5)
λ1 and λ2 are the assigned poles of the observer.We performed four experiments by ”UOT March II”,
which is shown in Fig.3.
Fig. 2. Linear observer Fig. 3. ”UOT March II”
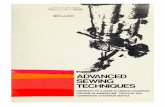
In order to test the robustness, we changed vehicle ve-locity, driver’s input steering wheel angle δ and road typein experiments. Fig.4 is one of the experimental results,which demonstrates that the proposed observer is robustand even if velocity, steering angle and road condition ischanged, the observer could still well estimate β[3].
0 5 10 15 20 25-15
-10
-5
0
5
10
15
time(s)
body s
lip a
ngle
β(d
eg)
β obtained by the proposed observer
β measured by noncontact optical sensor^
β
β
Fig. 4. Measured value and estimation of β
Next, we propose a new control method for 2-Dimensional control. We control β by yaw moment withPID controller. This method is known as DYC (Direct Yawmoment Control) in internal combustion engine vehicles(ICVs). However, the torque difference can be generateddirectly with in-wheel motors. We performed experimentsby ”UOT March II”. The experimental results, which isshown in Fig.5, prove that our proposed method is good[4].
II. Real time SMART speed pattern generator
In this chapter, we propose a novel motion controlmethod for EVs based on real time SMART speed patterngeneration (RSSPG). We especially consider the design ofa speed pattern which can be generated in real time takingaccount of driver’s command change. Three parameters ofRSSPG can be determine arbitrarily and separately based
0 1 2 3 4 5 6 70
5
10
15
20
25
β w/o control
β with control
control
β w/o control
β with control
bod
y s
lip
an
gle
β (
deg
)
time(s)0 1 2 3 4 5 6 7
8
7
6
5
4
3
2
1
0
-1
-2
time(s)
β obtained by the proposed observer
β measured by noncontact optical sensor
^
body s
lip a
ngle
β (
deg
)
β^
β
(a) Comparisons (b) Estimation of β
Fig. 5. Experiment results about β control
on the optimal control theory, which improve the safetyand ride comfort in ordinary traveling and emergency, andalso enable flexible pattern generation.
Estimation of Driver's Intention
RSSPG
)(* tv
)(* Ttv +
)(* Tta +
pK
+ -
*mF
)( Ttvω +
Accelerator/Brake
Pedal Operation)(tvH
)(* ta
)(* tj
Sa Cj C
PsPn
1
Fig. 6. Motion control of EVs using speed pattern
Fig.6 shows the block diagram of motion control of EVsusing speed pattern, which consists of 3 parts: estimationof driver’s intention based on the accelerator/brake pedaloperation, generation of speed pattern, and motion controlof vehicle utilizing generated speed pattern. This will en-able to fill the gap of drivers’s riving skill, and improve notonly ride comfort but also safety by achieving two thingsas follows:
1. generation and application of speed pattern accordingto driver’s intention of traveling.
2. smooth and speedy acceleration/deceleration.The remaining part of Fig.6 shows the control system thatis applied to implementation of the proposed speed pat-tern. To improve a tracking performance and disturbancerobustness, this system contains feedforward accelerationand feedback of motor speed. This will enable to lessenthe stress on the driver.
We had proposed the speed pattern based on SMARTcontrol design [5] to reduce jerk or the time derivative ofacceleration which is often related to ride comfort[6]. How-ever, there is the very important factor to consider in theapplication of speed pattern to Evs the change of driver’sinput occurs during mid-pattern, a new speed pattern mustbe recalculated in real time, which can be realized by ourproposed RSSPG Fig.7 shows the flow chart of RSSPG
We assume that expected final speed input vH(t) can bechanged in real time. Slope of jerk 6C0(t) is determinedbased on jerk command j(t), acceleration command a(t),speed command v(t), and expected final speed input vH(t)of time t, and jerk command j(t + T ), acceleration com-mand a(t + T ), and speed command v(t + T ) of time t + Tare calculated as RSSPG outputs, where T is the samplingtime.
The parameter C, or the changing rate of jerk, can beadjusted to fit accelerator/brake actions of human driver’s

Initialization
Decide aF
patterns updatevaj ,,
Y
N
N
Affirm the state of jerk
Calculate stop time periods of stop jerk pattern
Calculate final speed 7v
state 4Y
Hvv <7
,Saa =Saa >
C
H
jjaa
vv
1.0,1.0
005.0
<<
<−
Y
N0,0
,
==
=
ja
vv
Calculate stop time periodsof start jerk pattern
Affirm the state of jerk
S
0 2 4 6 8 10 12 140
1
2
3
4
5
6
7
8
9
10
11
Time [s]
Moto
r S
peed R
efe
rence [
m/s
]
vHC = 0.028C = 0.083C = 0.250
0 2 4 6 8 10 12 14-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Time [s]
Accele
rati
on R
efe
rence [
m /
s2
]
C = 0.028C = 0.083C = 0.250
0 2 4 6 8 10 12 14
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time [s]
Jerk
Ref
eren
ce [
m /
s 3
] C = 0.028C = 0.083C = 0.250
Fig. 7. Flow chart of RSSPG and speed, acceleration and jerk outputpattern
with different driving styles or the favorite traveling style ofpassengers. For example, as shown in Fig.7, someone whowants acceleration feel, however, someone who wants slowacceleration. In addition, the simulation results in Fig.7shows that a new speed pattern is really recalculated in realtime, when the change of driver’s control input vH(t) oc-curs during mid-pattern. The maximum safe accelerationaS in accordance with road condition and the acceptablemaximum jerk jC to ride comfort are adjustable, too.
In the future, this algorithm needs to be improved andexamined by real experiment.
III. Advanced hybrid braking system
A. Electric braking system cooperating with hydraulic ac-tuator based on disturbance observer
Almost all braking systems are made of hydraulic actua-tor.They have a long response delay, but they can generatesufficient braking torque[7][8].
Contrary, electric motor has quick and accurate outputtorque, and can be used both in traction and braking.
However, the power of electric motor is smaller, and it isimpossible to generate sufficient braking torque only withelectric motor.
Therefore, we propose a novel braking system using elec-tric motor which compensates for hydraulic actuator. Inthis system, we use disturbance observer, regarding differ-ence from command of hydraulic actuator as disturbance.
We show the block diagram of this system in Fig.8, whereM is weight of vehicle body, Mω is inertia of vehicle body,Phyd is the model of hydraulic actuator, and Pmotor ismodel of electric motor.
We assume the nominal model of vehicle body in adhe-sion condition, and obtained as equation(6).
Pn(s) =1
(M + Mω)s(6)
P
motor
hyd
P
hyd
motor w
hyd
F*
F
F
V*
d
+
-
++
+
+
+
+
-
Vechile Model
P n-
P (1+τs)
Fhyd
K
n
1
Fig. 8. Block diagram of braking system using vehicle nominal model
B. Experimental results
Experiments of braking system using electric motorwhich compensates for hydraulic actuator were carried outwith ”UOT March II”. In experiments, we drove at con-stat velocity before we apply brake sharply on the asphaltroad.
First, we show the experimental result using velocity sen-sor in Fig.9. In this condition, we need LPF which has largetime constant because the differential signal of velocity sen-sor vibrates drastically. For that, we cannot effectively usethe feature of electric motor.
0 1 2 3 4 50
1
2
3
4
5
6
7
time(s)
velocity(m/s)
real velocity
velocity without control
command velocity
0 1 2 3 4 5 6-5000
-4000
-3000
-2000
-1000
0
1000
2000
time(s)
output torque(N)
electric actuator
hydraulic actuator+ deviance
real braking torque
command of braking torque
(a) Velocity (b) Braking torque
Fig. 9. Experimental Result using velocity sensor
Next, we show the experimental result using accelerationsensor in Fig.10. In this experiment, both velocity andacceleration follow the command. As compared to systemusing velocity sensor, the vibration of input is reduced, andthus we can effectively use the feature of electric motor.
15 16 17 18 19 20 210
1
2
3
4
5
6
7
time(s)
velocity(m/s)
real velocity
velocity without control
command velocity
15 16 17 18 19 20 21-4000
-3000
-2000
-1000
0
1000
2000
time(s)
braking torque(N)
electric actuator
hydraulic actuatior + deviance
real braking torque
command of braking torque
(a)Velocity (b)Braking torque
Fig. 10. Experimental Result using acceleration sensor
The experimental results verify the effectiveness of theproposed method.

IV. Dynamic optimum force distribution
Dynamic optimum force distribution control is onemethod used for controlling over actuated system, whichis shown in Fig.11. In an over actuated system, the num-ber of actuators n exceeds the number of control effectorsm. There exit redundant control inputs which can be op-timally chosen to control the state variables. And thatcontrol subjects to several constraint conditions.
}
controlled
variables
true input signals
for actuators
feedback
reference inputs
Distribution
controlller
virtual
control effectors
Vm
m < n
...
V1
Un
...
U1
Actuators
...
Body
Plant
}
...
Control
law
-+
Yp
Y1
Xp
X1
Fig. 11. Block diagram of over actuated system
For example, ”UOT March II” has four in-wheel mo-tors. For planar motion control, the controlled variablesare yaw rate γ and/or vehicle body slip angle β. The con-trol effectors which are calculated by higher level controllerrepresent the forces FΣ, yaw moment Mz, and/or adaptivesteering angle ∆f . Those values are required for controldesign. However, those control effectors can only gener-ated through traction force control of EV motors. Whenredundant driving motors exit, force distribution controlcan be used to choose the most optimal control one.
Constrainted optimal control method is used for opti-mum force distribution. We design the control logic in twosteps. First we calculate the control effectors, V1, ..., Vm, bya higher level controller without considering the redundantdriving motors. Second, with the calculated control effec-tors, we calculate the control inputs, U1, ..., Un, with con-sidering the redundancy and constraints of optimal prob-lem.
A. Optimum traction force distribution for maneuverabilityimprovement
The block diagram of control system is shown in Fig.12.EV maneuverability improvement, which is the control ob-jective, is realized by controlling EV to track the desiredyaw rate. During that kind of control we test the proposedoptimum traction force distribution control method.
In Fig.12, the feedforward controller is a P -controller.Feedback controller is a LQR regulator. Four motoredwheels which are looked on as the control inputs for thecontrol system can be controlled by the proposed method.Yaw rate γ is the control output[9][10].
B. Experiment results
In the experiments, the in wheel motored EV is con-trolled to turn a circle with constant radius. The fric-tion coefficient is about 0.3 ∼ 0.4. During experiment,the steering angle is kept as possible as the same constantvalue. One of the experiment results is shown in Fig.13. Itdescribed that the yaw rate is controlled by the proposed
desired
model
DYC
controller
+
-
+
γ∗
Mfb
Mff
Facmotor sensors
EV Body
motor
motor
motor sensors+
δf
optimum force
distributionMzxfeedforward
controller
γ
estimation of
tire conditions
γ, ω,β
Fx1~x4
EV yaw motion control
force distribution
yaw rate feed back
*
*
Fig. 12. Optimum force distribution integrated with yaw rate controlfor EV maneuverability improvement
method to well follows the reference one. And thereforethe stability is enhanced and maneuverability is improved.
4321
Acceleration time [s]
Yaw
rate
err
or
468
10
2
1214
16182022
(γ
−
γ)ref
[deg
/s]
1.5 2.5 3.5
without control
w/ optimal force
distributionw/ equal force
distribution
0
Fig. 13. Experiment result of optimum force distribution integratedwith yaw rate control for EV maneuverability improvement
Dynamic optimum force distribution control has manymerits when used for EV motion control.
1. Tire constraints can be taken into account;2. Control reconfiguration can be performed when motor
failure;3. Motor can be controlled independently;4. Less time of algorithm calculating;
In the future, this algorithm need to be updated further.And we have been researching other optimum distributionstrategies based on the estimation of tire working condi-tions.
V. Small EV driven by ultra capacitor
This section has two topics. The first one is developmentof novel electric vehicle (Fig14) powered only by ”electricaldouble layer capacitor (EDLC)”. The second one is nor-mal force stabilizing (NFS) vehicle motion control usingthis vehicle. This vehicle provides us useful experimentalenvironment of electric vehicle motion control, since EDLCpower system can shorten charging time. About 40 sec-onds charging enables us 20 minutes driving. The meritof EDLC application for EV and the vehicle control sys-tem are shown. Novel vehicle stabilizing control methodusing acceleration information is proposed. Normal forcehas strong connectivity with driving force and its suddendecrease causes tire slip, which makes the whole vehiclemotion unstable. The simulation and experimental resultsare shown and its effectiveness will be discussed.

A. Merit of EDLC application for EV
EDLC application for EV has following advantageswhich secondary batteries don’t have.
1. Large current charging.2. Voltage level tells us remaining energy level.3. Durable for repetitive charge and discharge.4. Environmentally friendly.Theoretically EDLC is not based on chemical reaction
and its internal resistance is small, large current charging ispossible[11]. EDLC is also more than 100 times as durableas for repetition of charging and discharging. In addition,EDLC voltage level tells us remaining energy level very pre-cisely against the estimation of energy level on secondarybattery is very difficult. Using these advantages, we de-veloped experimental vehicle named ”Capacitor-COMS”.Less than 1 minutes charging realizes 20 minutes driving.
Fig. 14. Overall view of C-COMS
Although the EDLC’s energy density is very small, thepower density is more than 5 times as large as other devicesand cycle life is semi permanent. These characteristics en-able fast charging and make an electric vehicle suitable forexperiments, where lots of experiments are needed in thesame condition in short experimental time.
B. Normal force stabilizing (NFS) control using accelera-tion information
Considering of moment balance, the normal forces onthe center of front and rear shaft (Eq.7 and 8) are shownin Fig.15 and 16.
B.1 Normal force stabilization control
Fz−f =m
lf + lr(lrg + hax) (7)
Fz−r =m
lf + lr(lfg − hax) (8)
Defining ∆x, ∆y (∆), the normal force instability in-dices, the momentum balance equation in longitudinal di-rection is expressed by Eq.9[12].
−Fz−f (lf − ∆x) + Fz−r(lr + ∆x) = 0 (9)
Fz_fr
Fx_fr
Fy_fr
x
z
y
Fz_rl
Fx_rl
Fy_rl
Fz_rr
Fx_rr
Fy_rr
Fz_fl
Fx_fl
Fy_fl
MgMax
May
lf lr
h d/2
Fz_f Fz_r
Fig. 15. Normal force on each tire
Center
front rearax
Fz-rMg
Lf Lr
Fig. 16. Calculation of normal force
∆x, the index in x-direction is given by
∆x =Fz−f lf − Fz−rlr
Fz−f + Fz−r
=ax
gh (10)
In a similar way,
∆y =ay
gh (11)
The indices ∆ x,∆ y are proportional to the acceleration.To suppress these, differential torques are commanded oneach motor. Fig. 17 shows the block diagram of this controlmethod.
Vehicle model
δf
Q(s)
P(s)
+
+
Kp+s
KI⊿y
*
⊿y
Fl
Fr
Fr_pedal
Fl_pedal
+
-
+
+++
gh
Fig. 17. NFS control diagram
C. Experimental results of NFS
Fig 18(a) and (b) are the cases that ∆y∗ is generated asfollowing equation using gain K,vehicle speed V.
∆y∗ = KV δf (12)

7 8 9 10 11 12 13-0.02
0
0.02
0.04
0.06
0.08
0.1
Time(s)
Δy(m)
Δy *
W/O NFS control
With NFS control
(a)Step steering input
10 11 12 13 14 15 16 17 18 19 20
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Δy(m)
W/O NFS control
With NFS control
Δy*
Time(s)
3.0m/s270deg
(b)Sinusoidal steering inputFig. 18. Experimental results when ∆y∗ is generated from steering
angle
Fine ∆y suppression and following capability to ∆y∗ isverified with these results. Consequently, we can controland design the mobility of HCG in lateral direction, whichis one of vehicle turning characteristics, by the differentialtorque of right and left motors. It is very important to con-trol the mobility of HCG because it is related to not only“ ride quality”, but also“vehicle active safety”in turningmotion. Normal force has strong connectivity with driv-ing force whose sudden decease would make vehicle motionunstable.
In this section, the development of experimental vehi-cle powered only by EDLC is introduced and novel vehiclestabilizing control method using lateral acceleration infor-mation is proposed. Short charging time realized by EDLCpower system provides us useful experimental environment.The simulation and experimental results indicate the effec-tiveness of NFS control method. Dangerous steering inputis effectively suppressed and is controlled with referencevariables. By controlling, the novel vehicle active safety isrealized in turning motion.
VI. Conclusion
This paper introduces the researches on novel EVs de-velopment and motion control by taking the advantagesof high controllability of driven motors and novel electricenergy storage devices.
We propose a robust side slip angle estiomation method.And we verify that method through the experiment. Basedon the estimation of vehicle body side slip angle, a sideslip control strategy is proposed. The effect of proposedmethod is also verified by experiments.
We also discuss a novel motion control method forEVs based on Real-time SMART Speed Pattern Genera-tion using the optimal control theory. Three parametersof RSSPG can be determined arbitrarily and separately,which improves the safety and ride comfort in ordinarytraveling and emergency, and also enables flexible patterngeneration.
An advanced hybrid braking system is proposed. It is re-alized by cooperating electric braking systemwith hydraulicactuator based on disturbance observer. By utilizing elec-tric motors for braking system, we can realize quicker andmore precise braking system to compensate the slower re-sponse ability of hydraulic braking system in braking sta-bility control. The experimental results verify the effective-ness of the proposed hybrid braking system.
Optimum force distribution control is introduced. Ac-tuator redundancy is optimally used to avoid tire slip orlock and improve dynamic characteristics of EV, especiallywhen EV drives in critical conditions. Experiment resultsindicate that the proposed force distribution method moregreatly improve EV performance than the equal distribu-tion one does.
The development of experimental vehicle powered onlyby EDLC is introduced and the novel vehicle stabilizingcontrol method using lateral acceleration information isproposed. The simulation and experimental results indi-cate the effectiveness of NFS control method.
It becomes clear that electricity and control are the keysolution of vehicles in future. These vehicles will by defini-tion have electric motor driven-train and novel energy de-vice, which that can present an opportunity to get highercontrol performance over traditional vehicles.
Acknowledgments
At last, especially I wish to acknowledge devoted contri-butions of engineering staff Mr.Toshiyuki Uchida and mystudents Mr.Peng He, Mr.Kiyotaka Kawashima, Ms.CongGeng, Mr.Takeshi Fujii, Mr.Dejun Yin, Ms.Li Zhao, andMr.Takashi Koike, respectively.
References
[1] Yoichi Hori, ”Future Vehicle driven by Electricity and Control-Research on 4 Wheel Motored ’UOT March II’”, IEEE Trans-actions on Industrial Electronics, Vol. 51, No. 5, pp. 954–962,2004.10.
[2] Shin-ichiro Sakai, Hideo Sado and Yoichi Hori, ”Motion control inan electric vehicle with 4 independently driven in-wheel motors”,IEEE Trans. on Mechatronics, Vol. 4, No. 1, pp. 9–16, 1999.
[3] Yoshifumi Aoki, Yoichi Hori, ”Robust Design of Body Slip Angleobserver for Electric Vehicles and its Experimental Demonstra-tion”, IEEJ Trans. IA, vol.125-D,No.5, pp.467-472 (2005-5)(in Japanese).
[4] Yoshifumi Aoki, Toshiyuki Uchida, Yoichi Hori, ”ExperimentalDemonstration of Body Slip Angle Control based on a Novel Lin-ear Observer for Electric Vehicle”, The 31st Annual Conferenceof the IEEE Industrial Electronics Society, Raleigh, North Car-olina, USA, 2005. 11.
[5] Mizoshita Y., Hasegawa S., Takaishi K., ”Vibration MinimizedAccess Control for Disk Drive”, IEEE Transactions on Magnetics,Vol.32, No.3, pp.1793-1798, 1996.
[6] T.Saito, Yoichi Hori, ”Realtime Generation of Smart Speed Pat-tern for EVs taking Driver’s Command Change into account”,Proc. of AMC’04, 2004.
[7] Hirohisa Tanaka, Hiroyuki Kodama, Yoshiki Matsuzaki, KaoruTsubouchi, ”Innovative Technologies of Braking Systems andComponents”, Journal of Society of Automotive Engineerings ofJapan, vol.59, pp69-74, 2005.
[8] Japan ABS, ”Anti-lock Braking System”, Sankaido, 1993.[9] Peng He, Yoichi Hori, Makoto Kamachi, Kevin Walters and Hi-
roaki Yoshida, ”Future Motion Control to be Realized by In-wheelMotored Electric Vehicle”, The 31st Annual Conference of theIEEE Industrial Electronics Society, Raleigh, North Carolina,USA, 2005. 11.
[10] Hiroshi Fujimoto, Akio Tsumasaka and Toshihiko Noguchi, ”Di-rect Yaw-moment Control of Electric Vehicle Based on CorneringStiffness Estimation”, The 31st Annual Conference of the IEEEIndustrial Electronics Society, Raleigh, North Carolina, USA,2005. 11.
[11] Michio Okamura, ”Electrical Double Layered Capacitor andStorage System”, Nikkan-Kogyo-Shimbunsya, pp.25-31, (inJapanese)
[12] Masato Abe, ”Vehicle dynamics and control”, Sankaido, 1992.