
APPENDIX 1 INDUCTION MOTOR AND CONTROL...
23
129 APPENDIX 1 INDUCTION MOTOR AND CONTROL PARAMETERS Table A1.1 Induction motor rating 2.5 hp, 3 , star connected, 4-pole, 110 V, 14 A, 50 Hz Parameters Values in pu*. Stator resistance 0.143 Rotor resistance 0.052 Stator, rotor leakage Reactance 0.210 Mutual or magnetizing reactance 8.880 Inertia constant 0.133 System parameters DC link resistance 0.110 DC link Reactance 7.136 Output capacitor 0.141 * Per unit values are referred from Mummadi Veerachary (2002) Table A1.2 Laboratory prototype setup induction motor rating 1 hp, 3 , star connected, 4-pole, 415 V, 1.8A, 50 Hz Stator resistance 0.087 Ohm Rotor resistance 0.228 Ohm Stator, rotor leakage reactance 0.8e-3 H Mutual or magnetizing reactance 34.7e-3 H Inertia constant 0.602
Transcript of APPENDIX 1 INDUCTION MOTOR AND CONTROL...

129
APPENDIX 1
INDUCTION MOTOR AND CONTROL PARAMETERS
Table A1.1 Induction motor rating
2.5 hp, 3 , star connected, 4-pole, 110 V, 14 A, 50 Hz Parameters Values in pu*. Stator resistance 0.143Rotor resistance 0.052Stator, rotor leakage Reactance 0.210Mutual or magnetizing reactance 8.880Inertia constant 0.133System parameters DC link resistance 0.110DC link Reactance 7.136Output capacitor 0.141* Per unit values are referred from Mummadi Veerachary (2002)
Table A1.2 Laboratory prototype setup induction motor rating
1 hp, 3 , star connected, 4-pole, 415 V, 1.8A, 50 Hz
Stator resistance 0.087 Ohm
Rotor resistance 0.228 Ohm
Stator, rotor leakage reactance 0.8e-3 H
Mutual or magnetizing reactance 34.7e-3 H
Inertia constant 0.602

130
Table A1.3 Control parameters
Transients response specificationsDamping ratio 1Settling time 5% criterion Rise time 10% to 90% criterion Delay time 50% criterion Vector based V/f Control Method Current sensor gain 0.0175Current controller gain 0.25Speed sensor gain 0.0424Speed controller gain 2.85Current filter time constant 10e-3Current controller time constant 50e-3Speed filter time constant 0.2Speed controller time constant 1.5IOL Control Method Initial value of -axis stator current 0.491Initial value of -axis rotor current -0.36Initial value of -axis rotor current 0.207Load torque 0.9Slip 0.01Actual Pole Locations Desired Pole Locations 0+0i 0+0i -31.1938 +54.6649i -31.1938 -54.6649i 36.2345+0i3.9432+0i
-11+0i -12+0i -31.1938 +54.6649i -31.1938 -54.6649i -30+0i -10+0i
( × ) = [-2.8147 -2.1090 3.4245 -2.4321; 3.1115 3.1623 4.0831 1.9603]
( × ) = [10.0932 -19.0361; -11.2136 -3.3185]
( ) = [-3.275 9.135 5.569; -1.793 4.49 -0.679]
= [-50 50; -50 -50] = [10 0; 0 10]
131
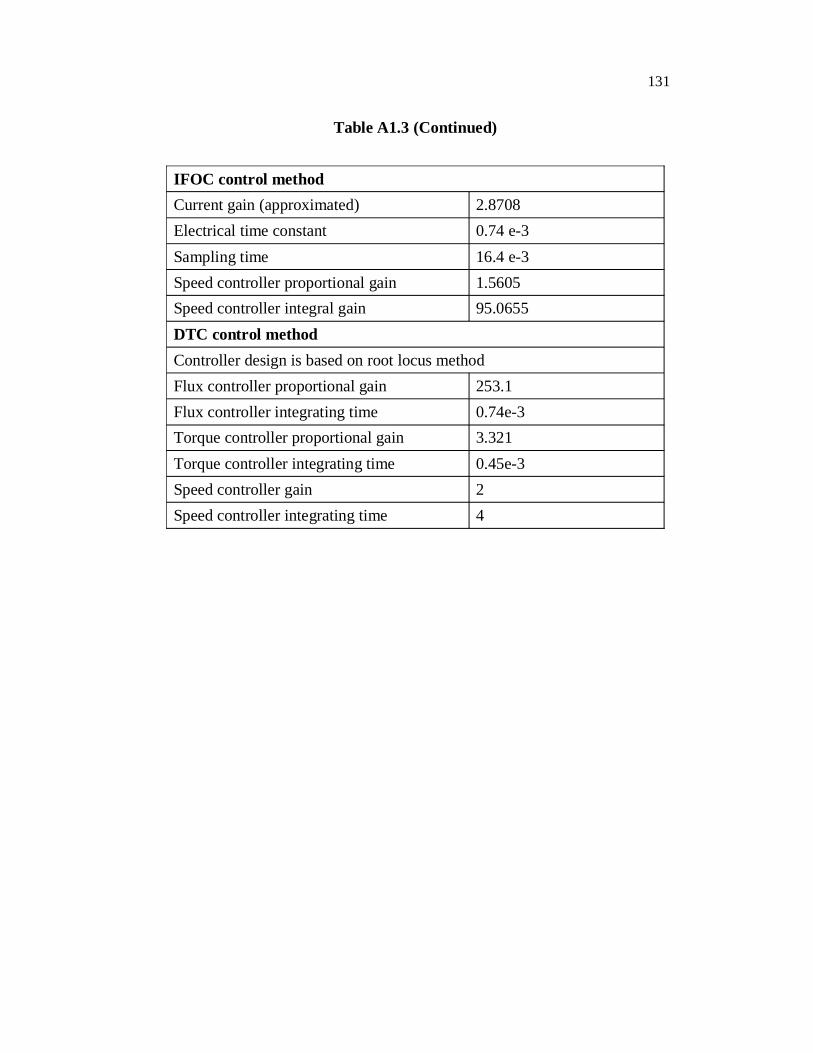
Table A1.3 (Continued)
IFOC control method Current gain (approximated) 2.8708Electrical time constant 0.74 e-3 Sampling time 16.4 e-3 Speed controller proportional gain 1.5605Speed controller integral gain 95.0655DTC control methodController design is based on root locus method Flux controller proportional gain 253.1Flux controller integrating time 0.74e-3Torque controller proportional gain 3.321Torque controller integrating time 0.45e-3Speed controller gain 2Speed controller integrating time 4


132
APPENDIX 2
MODELING AND CONTROL PROGRAMS
The simulation programs for this research work have been
developed using MATLAB simulink software 7.6. Different simulation
procedures are presented here for different sections of drives.
A2.1 PROGRAMS USED IN V/f CONTROL METHOD
These programs are used to test the performance of the V/f control
method of CSI fed IM drive described in Chapter 3.
A2.1.1 Program for rectifier section
File name: rectifiersection.m
function E = rectifiersection(x)
f=x(1) ; %Frequency
t=x(2) ; %Time instant
alpha=x(3)*(pi/180) ; %Firing angle in rad.
vm=x(4) ; %RMS value of the VL
w=2*pi*f ;
a=w*t ;
cyc=ceil(a/(2*pi)) ;
b=30*(pi/180) ;
c=90*(pi/180) ;
133
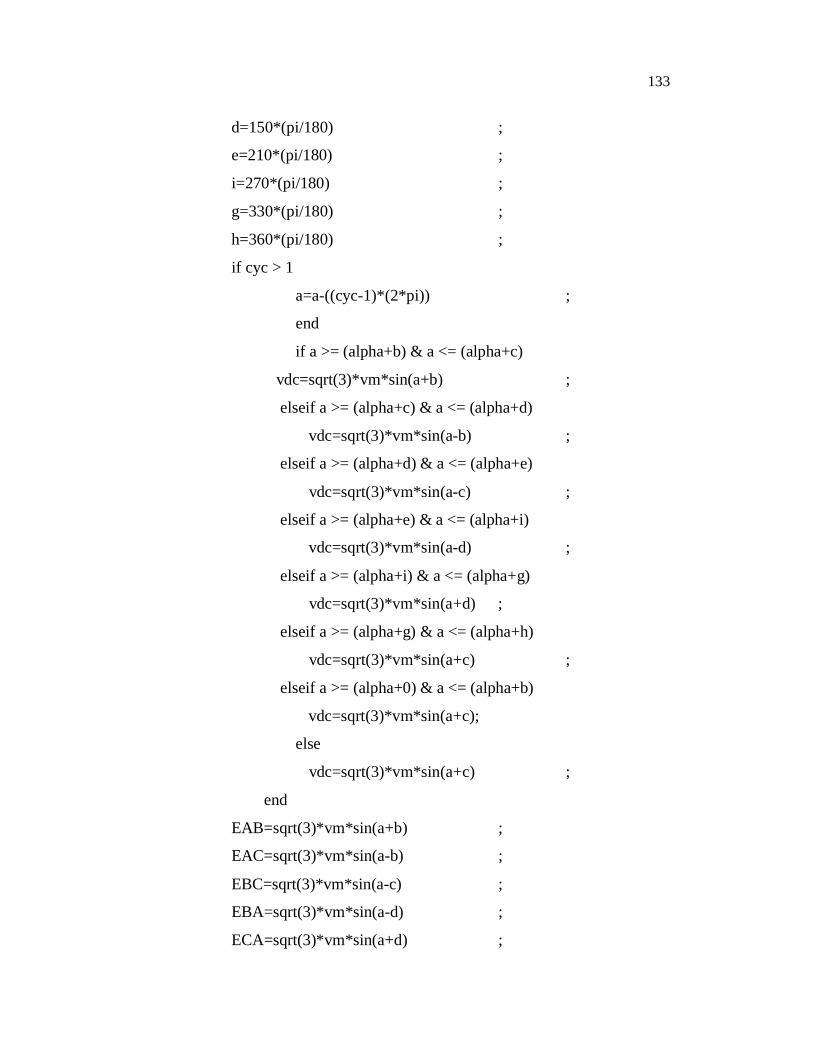
d=150*(pi/180) ;
e=210*(pi/180) ;
i=270*(pi/180) ;
g=330*(pi/180) ;
h=360*(pi/180) ;
if cyc > 1
a=a-((cyc-1)*(2*pi)) ;
end
if a >= (alpha+b) & a <= (alpha+c)
vdc=sqrt(3)*vm*sin(a+b) ;
elseif a >= (alpha+c) & a <= (alpha+d)
vdc=sqrt(3)*vm*sin(a-b) ;
elseif a >= (alpha+d) & a <= (alpha+e)
vdc=sqrt(3)*vm*sin(a-c) ;
elseif a >= (alpha+e) & a <= (alpha+i)
vdc=sqrt(3)*vm*sin(a-d) ;
elseif a >= (alpha+i) & a <= (alpha+g)
vdc=sqrt(3)*vm*sin(a+d) ;
elseif a >= (alpha+g) & a <= (alpha+h)
vdc=sqrt(3)*vm*sin(a+c) ;
elseif a >= (alpha+0) & a <= (alpha+b)
vdc=sqrt(3)*vm*sin(a+c);
else
vdc=sqrt(3)*vm*sin(a+c) ;
end
EAB=sqrt(3)*vm*sin(a+b) ;
EAC=sqrt(3)*vm*sin(a-b) ;
EBC=sqrt(3)*vm*sin(a-c) ;
EBA=sqrt(3)*vm*sin(a-d) ;
ECA=sqrt(3)*vm*sin(a+d) ;
134
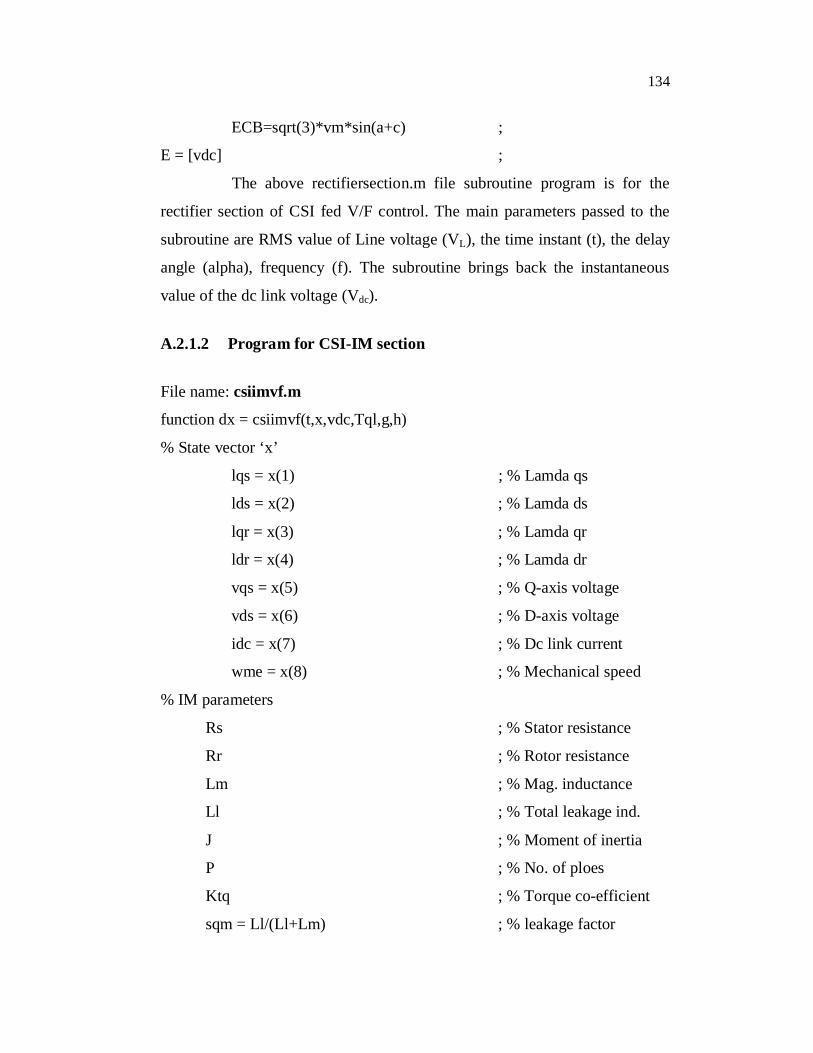
ECB=sqrt(3)*vm*sin(a+c) ;
E = [vdc] ;
The above rectifiersection.m file subroutine program is for the
rectifier section of CSI fed V/F control. The main parameters passed to the
subroutine are RMS value of Line voltage (VL), the time instant (t), the delay
angle (alpha), frequency (f). The subroutine brings back the instantaneous
value of the dc link voltage (Vdc).
A.2.1.2 Program for CSI-IM section
File name: csiimvf.m
function dx = csiimvf(t,x,vdc,Tql,g,h)
% State vector ‘x’
lqs = x(1) ; % Lamda qs
lds = x(2) ; % Lamda ds
lqr = x(3) ; % Lamda qr
ldr = x(4) ; % Lamda dr
vqs = x(5) ; % Q-axis voltage
vds = x(6) ; % D-axis voltage
idc = x(7) ; % Dc link current
wme = x(8) ; % Mechanical speed
% IM parameters
Rs ; % Stator resistance
Rr ; % Rotor resistance
Lm ; % Mag. inductance
Ll ; % Total leakage ind.
J ; % Moment of inertia
P ; % No. of ploes
Ktq ; % Torque co-efficient
sqm = Ll/(Ll+Lm) ; % leakage factor

135
Rdc ; % Res. of dc link ind.
C ; % Op filter capacitor
Ldc ; % Dc link inductance
% Select the switching state co-efficient K from the switching state table
f=g ;
t1=h ;
a=t1 ;
T=(1/(6*f)) ; % divided 6 intervals
b=2*T ;
c=b+T ;
d=c+T ;
e=d+T ;
g=e+d ;
if a >= 0 && a <= (T) % 1 switching state
K(1)=0 ;
K(2)=(2/(sqrt(3)*C)) ;
K(3)=0 ;
K(4)=-(sqrt(3)/Ldc) ;
elseif a >= T && a <= (b) % 2 switching state
K(1)=1/C ;
K(2)=(1/(sqrt(3)*C)) ;
K(3)=-(3/(2*Ldc)) ;
K(4)=-(sqrt(3)/(2*Ldc)) ;
elseif a >= (b) && a <= (c) % 3 switching state
K(1)=1/C ;
K(2)=-(1/(sqrt(3)*C)) ;
K(3)=-(3/(2*Ldc)) ;
K(4)=(sqrt(3)/(2*Ldc)) ;
elseif a >= (c) && a <= (d) % 4 switching state
K(1)=0 ;

136
K(2)=-(2/(sqrt(3)*C)) ;
K(3)=0 ;
K(4)=(sqrt(3)/Ldc) ;
elseif a >= (d) && a <= (e) % 5 switching state
K(1)=-(1/C) ;
K(2)=-(1/(sqrt(3)*C)) ;
K(3)=3/(2*Ldc) ;
K(4)=(sqrt(3)/(2*Ldc)) ;
elseif a >= (e) && a <= (g) % 6 switching state
K(1)=-(1/C) ;
K(2)=(1/(sqrt(3)*C)) ;
K(3)=3/(2*Ldc) ;
K(4)=-(sqrt(3)/(2*Ldc)) ;
End
% State transition matrix ‘A’ (8x8)
A11 = -Rs/(sqm*Lm) ; % Row 1
A12 = 0 ;
A13 = Rs/Ll ;
A14 = 0 ;
A15 = 1 ;
A16 = 0 ;
A17 = 0 ;
A18 = 0 ;
A21 = 0 ; % Row 2
A22 = -Rs/(sqm*Lm) ;
A23 = 0 ;
A24 = Rs/Ll ;
A25 = 0 ;
A26 = 1 ;
137
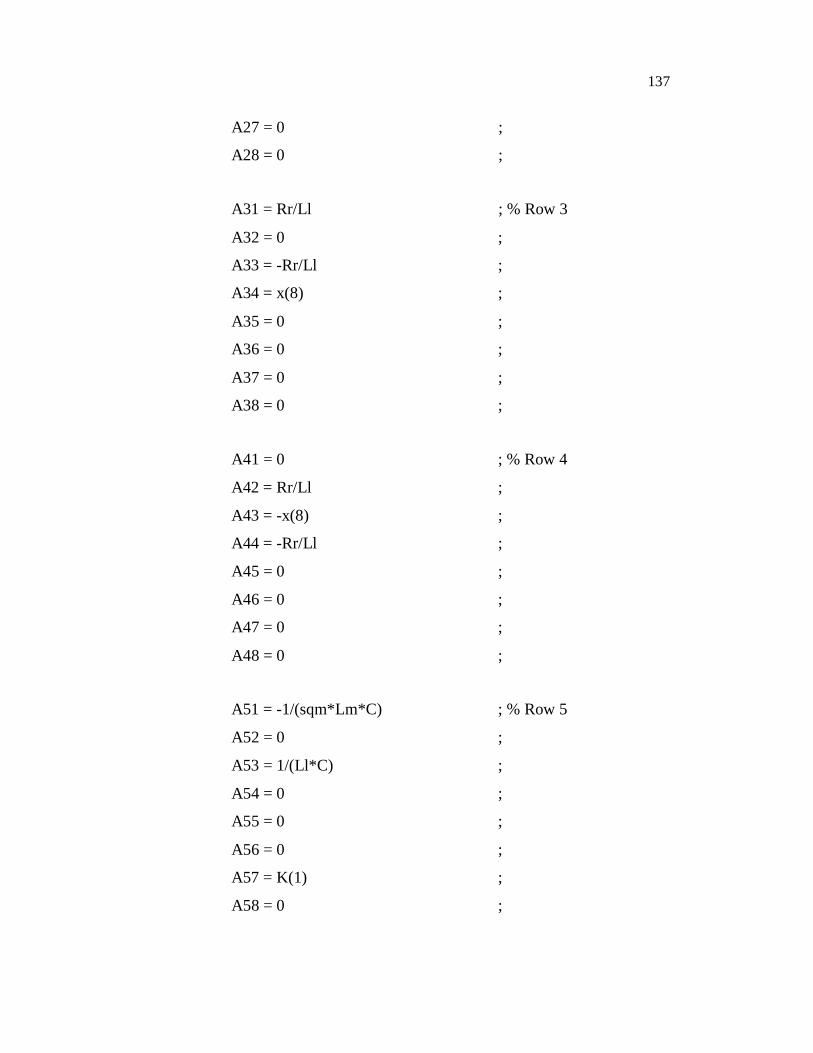
A27 = 0 ;
A28 = 0 ;
A31 = Rr/Ll ; % Row 3
A32 = 0 ;
A33 = -Rr/Ll ;
A34 = x(8) ;
A35 = 0 ;
A36 = 0 ;
A37 = 0 ;
A38 = 0 ;
A41 = 0 ; % Row 4
A42 = Rr/Ll ;
A43 = -x(8) ;
A44 = -Rr/Ll ;
A45 = 0 ;
A46 = 0 ;
A47 = 0 ;
A48 = 0 ;
A51 = -1/(sqm*Lm*C) ; % Row 5
A52 = 0 ;
A53 = 1/(Ll*C) ;
A54 = 0 ;
A55 = 0 ;
A56 = 0 ;
A57 = K(1) ;
A58 = 0 ;

138
A61 = 0 ; % Row 6
A62 = -1/(sqm*Lm*C) ;
A63 = 0 ;
A64 = 1/(Ll*C) ;
A65 = 0 ;
A66 = 0 ;
A67 = K(2) ;
A68 = 0 ;
A71 = 0 ; % Row 7
A72 = 0 ;
A73 = 0 ;
A74 = 0 ;
A75 = K(3) ;
A76 = K(4) ;
A77 = -Rdc/Ldc ;
A78 = 0 ;
A81 = Ktq*x(4) ; % Row 8
A82 = -Ktq*x(3) ;
A83 = 0 ;
A84 = 0 ;
A85 = 0 ;
A86 = 0 ;
A87 = 0 ;
A88 = 0 ;
% Input coefficient matrix ‘B’ (8x2)
B11 = 0 ; % Row 1
B12 = 0 ;
139
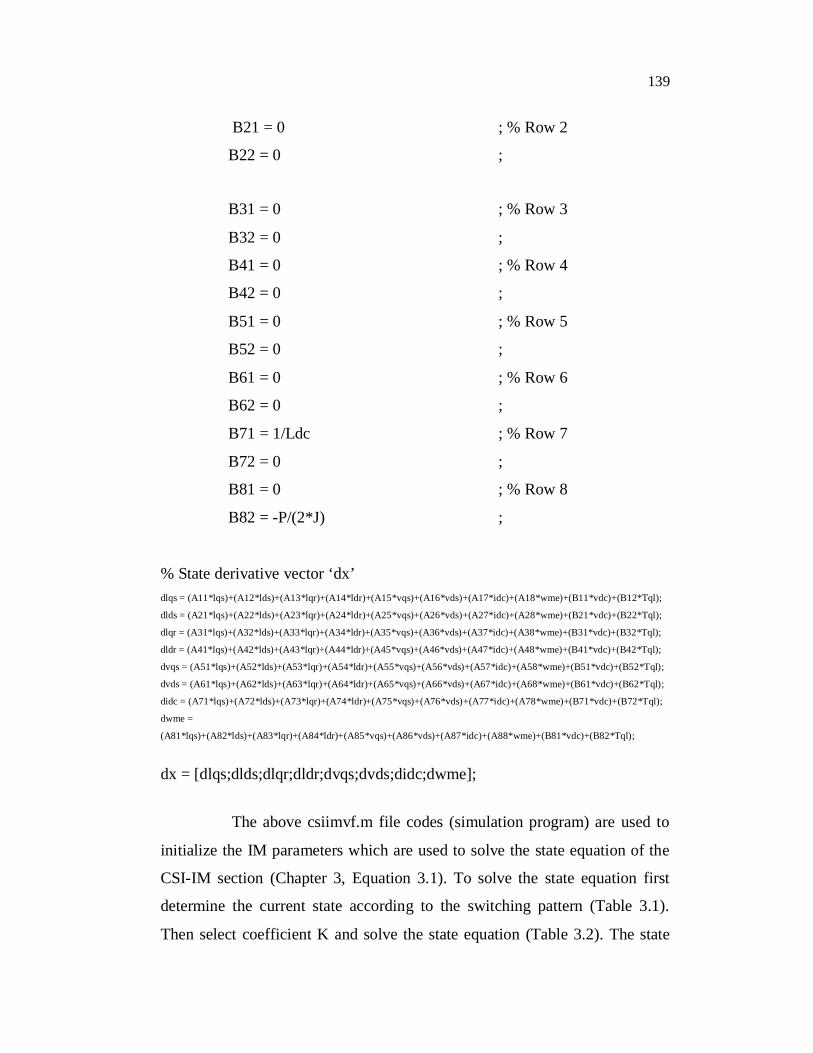
B21 = 0 ; % Row 2
B22 = 0 ;
B31 = 0 ; % Row 3
B32 = 0 ;
B41 = 0 ; % Row 4
B42 = 0 ;
B51 = 0 ; % Row 5
B52 = 0 ;
B61 = 0 ; % Row 6
B62 = 0 ;
B71 = 1/Ldc ; % Row 7
B72 = 0 ;
B81 = 0 ; % Row 8
B82 = -P/(2*J) ;
% State derivative vector ‘dx’ dlqs = (A11*lqs)+(A12*lds)+(A13*lqr)+(A14*ldr)+(A15*vqs)+(A16*vds)+(A17*idc)+(A18*wme)+(B11*vdc)+(B12*Tql);
dlds = (A21*lqs)+(A22*lds)+(A23*lqr)+(A24*ldr)+(A25*vqs)+(A26*vds)+(A27*idc)+(A28*wme)+(B21*vdc)+(B22*Tql);
dlqr = (A31*lqs)+(A32*lds)+(A33*lqr)+(A34*ldr)+(A35*vqs)+(A36*vds)+(A37*idc)+(A38*wme)+(B31*vdc)+(B32*Tql);
dldr = (A41*lqs)+(A42*lds)+(A43*lqr)+(A44*ldr)+(A45*vqs)+(A46*vds)+(A47*idc)+(A48*wme)+(B41*vdc)+(B42*Tql);
dvqs = (A51*lqs)+(A52*lds)+(A53*lqr)+(A54*ldr)+(A55*vqs)+(A56*vds)+(A57*idc)+(A58*wme)+(B51*vdc)+(B52*Tql);
dvds = (A61*lqs)+(A62*lds)+(A63*lqr)+(A64*ldr)+(A65*vqs)+(A66*vds)+(A67*idc)+(A68*wme)+(B61*vdc)+(B62*Tql);
didc = (A71*lqs)+(A72*lds)+(A73*lqr)+(A74*ldr)+(A75*vqs)+(A76*vds)+(A77*idc)+(A78*wme)+(B71*vdc)+(B72*Tql);
dwme =
(A81*lqs)+(A82*lds)+(A83*lqr)+(A84*ldr)+(A85*vqs)+(A86*vds)+(A87*idc)+(A88*wme)+(B81*vdc)+(B82*Tql);
dx = [dlqs;dlds;dlqr;dldr;dvqs;dvds;didc;dwme];
The above csiimvf.m file codes (simulation program) are used to
initialize the IM parameters which are used to solve the state equation of the
CSI-IM section (Chapter 3, Equation 3.1). To solve the state equation first
determine the current state according to the switching pattern (Table 3.1).
Then select coefficient K and solve the state equation (Table 3.2). The state

140
Equation 3.1 with coefficient K completely describes the dynamic behavior of
IM section.
File name: csiimvf_sfcn.m
function [sys,x0,str,ts]=...
csiimvf_sfcn(t,x,u,flag,lqsinit,ldsinit,lqrinit,ldrinit,vqsinit,vdsinit,idcinit,wmei
nit)
switch flag
case 0 % initialize
str=[] ;
ts = [0 0] ;
s = simsizes ;
s.NumContStates = 8 ;
s.NumDiscStates = 0 ;
s.NumOutputs = 8 ;
s.NumInputs = 4 ;
s.DirFeedthrough = 0 ;
s.NumSampleTimes = 1 ;
sys = simsizes(s) ;
x0 = [lqsinit,ldsinit,lqrinit,ldrinit,vqsinit,vdsinit,idcinit,wmeinit] ;
case 1 % derivatives
vdc = u(1) ;
Tql = u(2) ;
g = u(3) ;
h = u(4) ;
sys = csiimvf(t,x,vdc,Tql,g,h) ;
case 3 % output
sys = x ;
case {2 4 9} % 2:discrete, % 4:calcTimeHit, % 9:termination
141
sys =[] ;
otherwise
error(['unhandled flag =',num2str(flag)]) ;
end
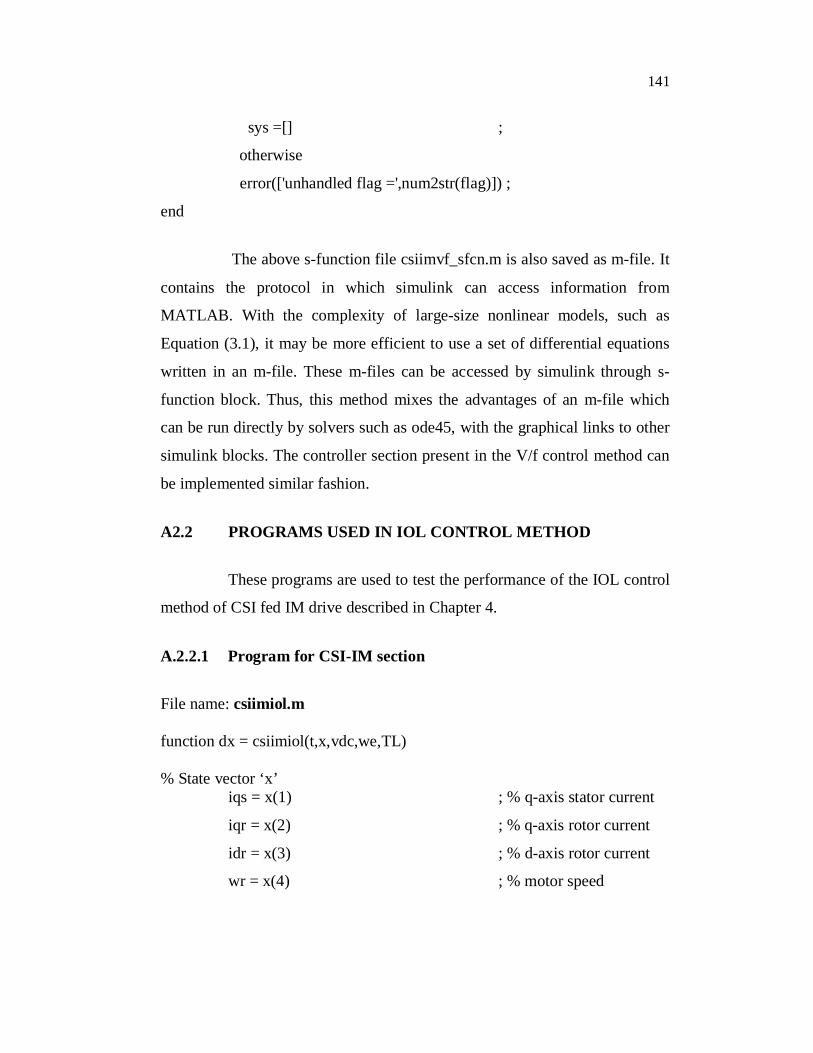
The above s-function file csiimvf_sfcn.m is also saved as m-file. It
contains the protocol in which simulink can access information from
MATLAB. With the complexity of large-size nonlinear models, such as
Equation (3.1), it may be more efficient to use a set of differential equations
written in an m-file. These m-files can be accessed by simulink through s-
function block. Thus, this method mixes the advantages of an m-file which
can be run directly by solvers such as ode45, with the graphical links to other
simulink blocks. The controller section present in the V/f control method can
be implemented similar fashion.
A2.2 PROGRAMS USED IN IOL CONTROL METHOD
These programs are used to test the performance of the IOL control
method of CSI fed IM drive described in Chapter 4.
A.2.2.1 Program for CSI-IM section
File name: csiimiol.m
function dx = csiimiol(t,x,vdc,we,TL)
% State vector ‘x’ iqs = x(1) ; % q-axis stator current
iqr = x(2) ; % q-axis rotor current
idr = x(3) ; % d-axis rotor current
wr = x(4) ; % motor speed

142
% IM parameters can be enter below
xs=xm+xls;
xo=(xs+(3.14^2*xd/18));
ro=(rs+(3.14^2*rd/18));
% State transition matrix ‘A’ (4x4)
A11 = (-xr*ro*wb/(xo*xr-xm^2)) ; % Row 1
A12 = (xm*rr*wb/(xo*xr-xm^2)) ;
A13 = (-weo*xr*xm*(1-s)/(xo*xr-xm^2));
A14 =(xm*xr*idro*wb/(xo*xr-xm^2)) ;
A21 = (wb*xm*ro/(xo*xr-xm^2)) ; % Row 2
A22 = (-xo*rr*wb/(xo*xr-xm^2)) ;
A23 = (weo*(xm^2-s*xo*xr)/(xo*xr-xm^2));
A24 = (xo*xr*idro*wb/(xo*xr-xm^2)) ;
A31 = (s*weo*xm/xr) ; % Row 3
A32 = (s*weo) ;
A33 = (-wb*rr/xr) ;
A34 = (-wb*(xm*iqso+xr*iqro)/xr) ;
A41 = (xm*idro/2*H) ; % Row 4
A42 = 0 ;
A43 = (xm*iqso/2*H) ;
A44 = 0 ;
% Input coefficient matrix ‘B’ (4x3)
B11 = (xr*wb/(xo*xr-xm^2)) ; % Row 1
B12 = 0 ;
B13 = 0 ;
B21 = (-xm*wb/(xo*xr-xm^2)) ; % Row 2
B22 = (-wb*idro) ;
B23 = 0 ;
B31 = 0 ; % Row 3
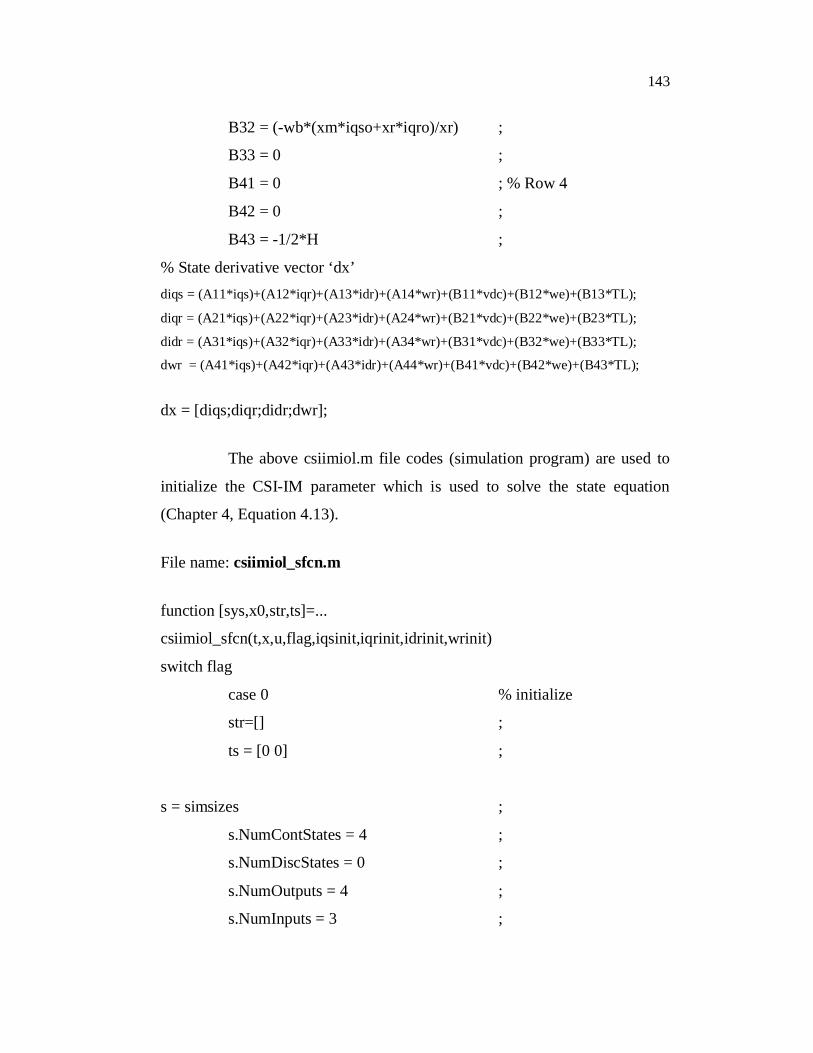
143
B32 = (-wb*(xm*iqso+xr*iqro)/xr) ;
B33 = 0 ;
B41 = 0 ; % Row 4
B42 = 0 ;
B43 = -1/2*H ;
% State derivative vector ‘dx’ diqs = (A11*iqs)+(A12*iqr)+(A13*idr)+(A14*wr)+(B11*vdc)+(B12*we)+(B13*TL);
diqr = (A21*iqs)+(A22*iqr)+(A23*idr)+(A24*wr)+(B21*vdc)+(B22*we)+(B23*TL);
didr = (A31*iqs)+(A32*iqr)+(A33*idr)+(A34*wr)+(B31*vdc)+(B32*we)+(B33*TL);
dwr = (A41*iqs)+(A42*iqr)+(A43*idr)+(A44*wr)+(B41*vdc)+(B42*we)+(B43*TL);
dx = [diqs;diqr;didr;dwr];
The above csiimiol.m file codes (simulation program) are used to
initialize the CSI-IM parameter which is used to solve the state equation
(Chapter 4, Equation 4.13).
File name: csiimiol_sfcn.m
function [sys,x0,str,ts]=...
csiimiol_sfcn(t,x,u,flag,iqsinit,iqrinit,idrinit,wrinit)
switch flag
case 0 % initialize
str=[] ;
ts = [0 0] ;
s = simsizes ;
s.NumContStates = 4 ;
s.NumDiscStates = 0 ;
s.NumOutputs = 4 ;
s.NumInputs = 3 ;

144
s.DirFeedthrough = 0 ;
s.NumSampleTimes = 1 ;
sys = simsizes(s) ;
x0 = [iqsinit,iqrinit,idrinit,wrinit] ;
case 1 % derivatives
vdc = u(1) ;
we = u(2) ;
TL = u(3) ;
sys = csiimiol(t,x,vdc,we,TL) ;
case 3 % output
sys = x ;
case {2 4 9} % 2:discrete, % 4:calcTimeHit, % 9:termination
sys =[] ;
otherwise
error(['unhandled flag =',num2str(flag)]) ;
end
The above csiimiol-sfcn.m file sfunction codes (simulation
program) are used to solve the state equation of the CSI-IM section (Chapter
4, Equation 4.13). These m-files can be accessed by simulink through s-
function block.
A.2.2.2 Program for reduced order observer
File name: csiimiolobs.m
function dx = csiimiolobs(t,x,u1,u2,d,y1,y2)
% Observer section state vector ‘x’
tau1 = x(1) ; % q axis rotor current
tau2 = x(2) ; % d axis rotor current
145
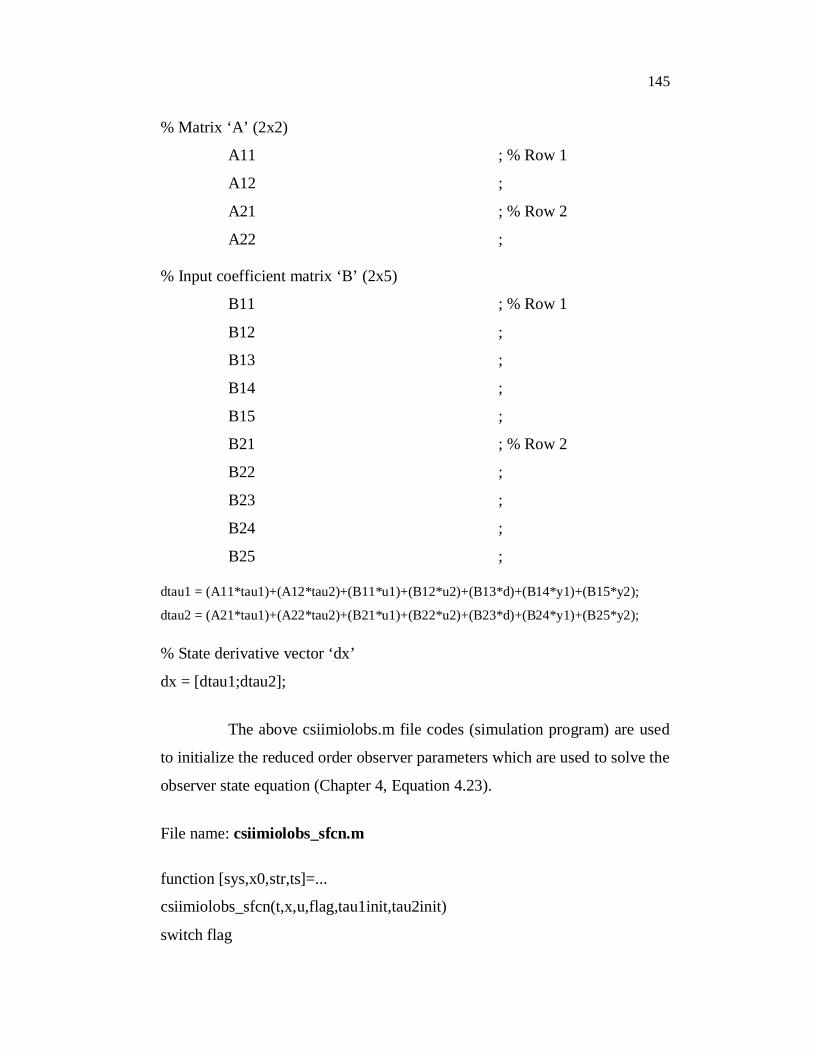
% Matrix ‘A’ (2x2)
A11 ; % Row 1
A12 ;
A21 ; % Row 2
A22 ;
% Input coefficient matrix ‘B’ (2x5)
B11 ; % Row 1
B12 ;
B13 ;
B14 ;
B15 ;
B21 ; % Row 2
B22 ;
B23 ;
B24 ;
B25 ;
dtau1 = (A11*tau1)+(A12*tau2)+(B11*u1)+(B12*u2)+(B13*d)+(B14*y1)+(B15*y2);
dtau2 = (A21*tau1)+(A22*tau2)+(B21*u1)+(B22*u2)+(B23*d)+(B24*y1)+(B25*y2);
% State derivative vector ‘dx’
dx = [dtau1;dtau2];
The above csiimiolobs.m file codes (simulation program) are used
to initialize the reduced order observer parameters which are used to solve the
observer state equation (Chapter 4, Equation 4.23).
File name: csiimiolobs_sfcn.m
function [sys,x0,str,ts]=...
csiimiolobs_sfcn(t,x,u,flag,tau1init,tau2init)
switch flag

146
case 0 % initialize
str=[] ;
ts = [0 0] ;
s = simsizes ;
s.NumContStates = 2 ;
s.NumDiscStates = 0 ;
s.NumOutputs = 2 ;
s.NumInputs = 5 ;
s.DirFeedthrough = 0 ;
s.NumSampleTimes = 1 ;
sys = simsizes(s) ;
x0 = [tau1init,tau2init] ;
case 1 % derivatives
u1 = u(1) ;
u2 = u(2) ;
d = u(3) ;
y1 = u(4) ;
y2 = u(5) ;
sys = csiimiolobs(t,x,u1,u2,d,y1,y2) ;
case 3 % output
sys = x ;
case {2 4 9} % 2:discrete, % 4:calcTimeHit, % 9:termination
sys =[] ;
otherwise
error(['unhandled flag =',num2str(flag)]) ;
end
The above csiimiolobs_sfcn.m file sfunction codes (simulation
program) are used to solve the reduced order observer state equation of IOL
control method (Chapter 4, Equation 4.23).

147
A2.3 SIMULINK MODELS USED IN IFOC CONTROL METHOD
Figure A2.1 Simulation implementation of IM (current model-RFO) in
IFOC method
Figure A2.2 Simulink implementation of Iabc to Idq (3 phase to 2 phase)
conversion
Lm/taur
1/taur
Lm/taur
Te=.75*p*(Lm/Lr)*(iqs/phir)
wr
wr=Lm*iqs/(phir*taur)
phir=Lm*ids/(taur,s+1)Currents from inverter
1Te
iabc
thetaidq
abc2dq 1/s
1/sp/2-K-
-K-
-K-
-K-
Demux
2wmech
1Iabc
ids
phir
phir
iqs
wkwm
wr
theta
Fcn-f(u) = u(1)*cos(u(4))+u(2)*cos(u(4)-2*pi/3)+u(3)*cos(u(4)+2*pi/3)Fcn1-f(u) = -u(1)*sin(u(4))-u(2)*sin(u(4)-2*pi/3)-u(3)*sin(u(4)+2*pi/3)
1idq
2/3
f(u)
Fcn1
f(u)
Fcn2
theta
1iabc

148
Figure A2.3 Simulink implementation of Idq to Iabc (2 phase to 3 phase)
conversion
Figure A2.4 Simulink implementation of Theta* calculator
Fcn-f(u) = u(1)*cos(u(3))-u(2)*sin(u(3))Fcn1-f(u) = u(1)*cos(u(3)-2*pi/3)-u(2)*sin(u(3)-2*pi/3)Fcn2-f(u) = u(1)*cos(u(3)+2*pi/3)-u(2)*sin(u(3)+2*pi/3)
1iabc
f(u)
Fcn2
f(u)
Fcn1
f(u)
Fcn
2theta*
1idq*
Theta= Electrical angle= integ ( wr + wm)
wr = Rotor frequency (rad/s) = Lm *Iq / ( taur * Phir) Lr = Lrl +Lmwm= Rotor speed (rad/s) taur = Lr / Rr
Fcn = Lm*u[1]/(u[2]*taur*ktune+1e-3)
Fcn
1theta*
1/s
Lm*u[1]/(u[2]*taur*ktune+1e-3)
3wm
2Phir
1Iq wr*

149
Figure A2.5 Simulink implementation of rotor flux calculator
A2.4 SIMULINK MODELS USED IN DTC CONTROL METHOD
Figure A2.6 Simulink implementation of in modular approach
150
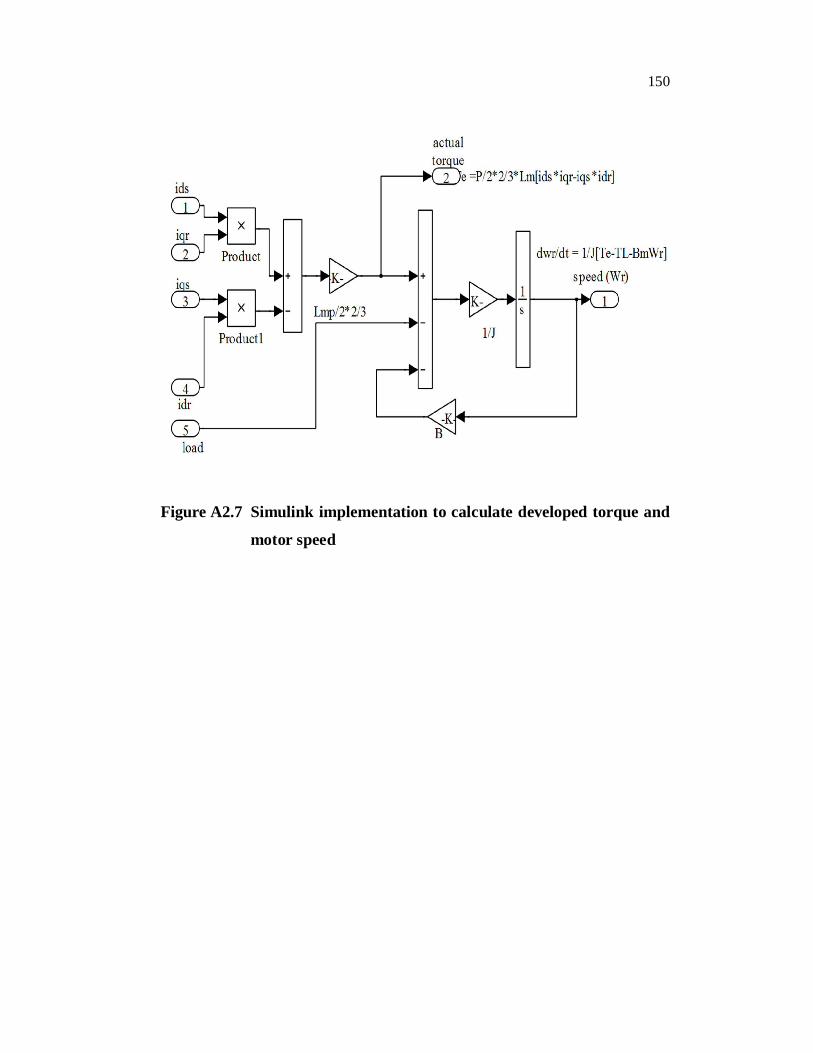
Figure A2.7 Simulink implementation to calculate developed torque and
motor speed





![Interview schedule for the Ashtavaidyasshodhganga.inflibnet.ac.in/bitstream/10603/14439/14/14_appendix.pdf · SENIOR NARYANAN MOOSS WITH IDS VEL] (WIFE) 194 . CHERIYA NARAYANAN NAMPOOTHIRI](https://static.fdocuments.in/doc/165x107/5f7127b65b17b0213778a93b/interview-schedule-for-the-as-senior-naryanan-mooss-with-ids-vel-wife-194-cheriya.jpg)












