
and Gender-sensitive Guidance and Counselling - Jyv¤skyl¤n
28
Compensation Using Frequency Response Control Systems Design Dr. Hatem Elaydi Electrical Engineering Depatment 1 Islamic University of Gaza Fall 2011
Transcript of and Gender-sensitive Guidance and Counselling - Jyv¤skyl¤n

Compensation Using Frequency ResponseControl Systems Design
Dr. Hatem ElaydiElectrical Engineering Depatment
1
Islamic University of Gaza
Fall 2011

Compensators
The basic controller operation analysisActive compensation: PI D controllerPassive compensation: Phase-lead controller
Phase-lag controller Phase lag-lead controller
2
Phase lag-lead controller

Introduction
Compensation or correction of a control system
)1)(1()()( :Example
sTss
KsHsG
stablebecan systemloop-closed thismake
:getwecriterion,Hurwitz-RouthUsingSolution:
3
:getwecriterion,Hurwitz-RouthUsing
0)T 0(K
TT
TK
11
1
)()()( :if But
12
Tss
KsHsG
.or varyingonlystablebenot cansystem
loop-closedthisCriterion,Hurwitz-Routhtoding Accor
TK
Solution:

Definition of the compensation:
TτTss
sKsHsG
)1(
)1()()( :makeweIf
2
This closed-loop system can be stable.
We make the system stable by increasing a component.
Intro…
This procedureis called the compensation or correction.
Definition of the compensation:
4
increasing a component ,which makes the system’s performance to be improved, other than only varying the
system’s parameters, this procedure is called the compensation or correction of the system.

The compensator is an additional component or circuit that is inserted into a control system to compensate for a deficient performance.
component, 1sincreaseto ,)(
)()( :Example
12 Tss
KsHsG
Compensator
r.compensatoais 1s stable,becansystemthe
)(
1Tss
5
Types of the compensation
:typesseveralget canwesystem,theof
structurethein)(oflocationthetoaccordingand ),(
asdesignatedisr compensatotheoffunctiontransfer The
sGsG cc

Basic types of compensators
Active Compensators
PID controller
Transfer function:
DI
pc sτsτ
K(s)G )(1
1
6
DpDI
pIDIp
I
KKK
KsKs
KK
sτ
; 1
stability.improvingcontrolleraldifferenti--D
.clearingcontrollergintegratin-- I
y.sensitivitpromotingcontrolleralproportion --P
sse

PD controller )( :functiontransfer sKKsG Dpc
C(s)G(s)
R(s)-
+pK
sK D
+
+
)( sGC
)2()(
:Assuming
2
n
nss
sG
dcompensatetheoffunctiontransfer loopopenThe
7
)2(
)()()( :issystem
dcompensatetheoffunctiontransfer loopopenThe 2
n
DPnc ss
sKKsGsG
D
P
K
Ks :at zeroloopopen
aaddingtoequivalentiscontrollerPD thethat showsIt

Effects of PD controller:
2) PD controller improve the system’s stability (to increase damping and reduce maximum overshoot);
3) PD controller reduce the rise time and settling time;
1) PD controller does not alter the system type;
8
3) PD controller reduce the rise time and settling time;
4) PD controller increase BW(Band Width) and improve GM & PM
- bring in the noise !

PI controllers
KKsG Ipc1
)( :functionTransfer
)2()( :Assuming
2
n
n
sssG
C(s)G(s)
R(s)-
+pK
sK I
1
+
+
)(sGC
:issystemdcompensatetheoffunctiontransfer loopopenThe
9
)2(
)(
)2(
)1
()()(
:issystemdcompensatetheoffunctiontransfer loopopenThe
2
22
n
IPn
n
IPnc
ss
KsK
sss
KKsGsG
0s :atpoleaand :at zero
loopopenaaddingtoequivalentiscontrollerPI thethat showsIt
P
IK
Ks

Effects of PI controller:
1) Increase the system’s type-clear the steady-state error ;
2) reduce BW(Band Width) and GM & PM
beneficial to the noise limiting ,
10
beneficial to the noise limiting ,not beneficial to the system’s stability.

G(s)R(s) C(s)
- +pK
sKI
1
PID controller Transfer function: sKs
KK(s)G DIpc 1
11
sI
sK D)(sGC
PID controller have advantages both of PI and PD.

Passive compensation
c
c
s1
(s)G controllerlag-phase2)
1 s1
s1(s)G controllerlead-phase)
1
1
Types of passive controller
12
ab
c
c
,
s1
s1
s1
s1(s)G controllerlead-lagphase3)
s1
(s)G controllerlag-phase2)
11
1
a
a
b
b

1 )( :functionTransfer
controller lead-Phase )
ps
zs
τs
τssGc
1
1
1
1
Passive controllers
13
τ p
τz
11

τj
jjωGc
1
1)(
responseFrequency
1
occurswhichat frequencythe
and,phase,theofvalueMaxmum
mm
m
zpm
:getwewhichfrom
tantan
)()(
11
jjGc
14
m
m
m
sin
sin
sin
:getwewhichfrom
1
1
1
11
Effects are similar to PD.Compensation ideal:
make ωm to be ωc !
Bode plotz pzp

1 1
1s
1s)( :functionTransfer
controllerlag-Phase )
ps
zssGc
2
Passive controllers
15
βτ p
τz
11

jω
jωjωGc
1
1)(
responseFrequency
Effects are similar to PI. 2
1
16
Compensation ideal:
Make 1/τto be in the lower frequency-band and far from ωc !
Bode plot
2
1

1 1
1
1
1
1)(
responseFrequency
b
b
a
ac j
j
j
jjωG
Effects are similar to PID.
Compensation ideal:
dBL( /)
dB/dec20
0
dB/dec20
b1
a1
b1
a1
)(
17
Compensation ideal:
First make the phase-lag compensation-to satisfy ess
and compensate a part of γc .
second make the phase-lead compensation-to satisfy the transitional requirements.
)(
090
090
Bode plot

Cascade compensation by frequency response methodCascade compensation by frequency response method
Phase-Lead Compensation using Bode diagram
d.compensate
becanangleLead-phasemaxmum,betomake :Ideal cm ).( is
systemteduncompensafunctiontransfer loopopen :Assume
sGHK 00
:oncompensati Active1. s)τ(K(s)G 1
18
)(
)()(desirethefromget becan :
desirethefromget becan :
:oncompensati Active1.
(s)(s)GGHK
sGsGHτ
KKeK
s)τ(K(s)G
c
c
jsC
jωsCCD
pssp
DpC
1
180
1
1
00
00
0
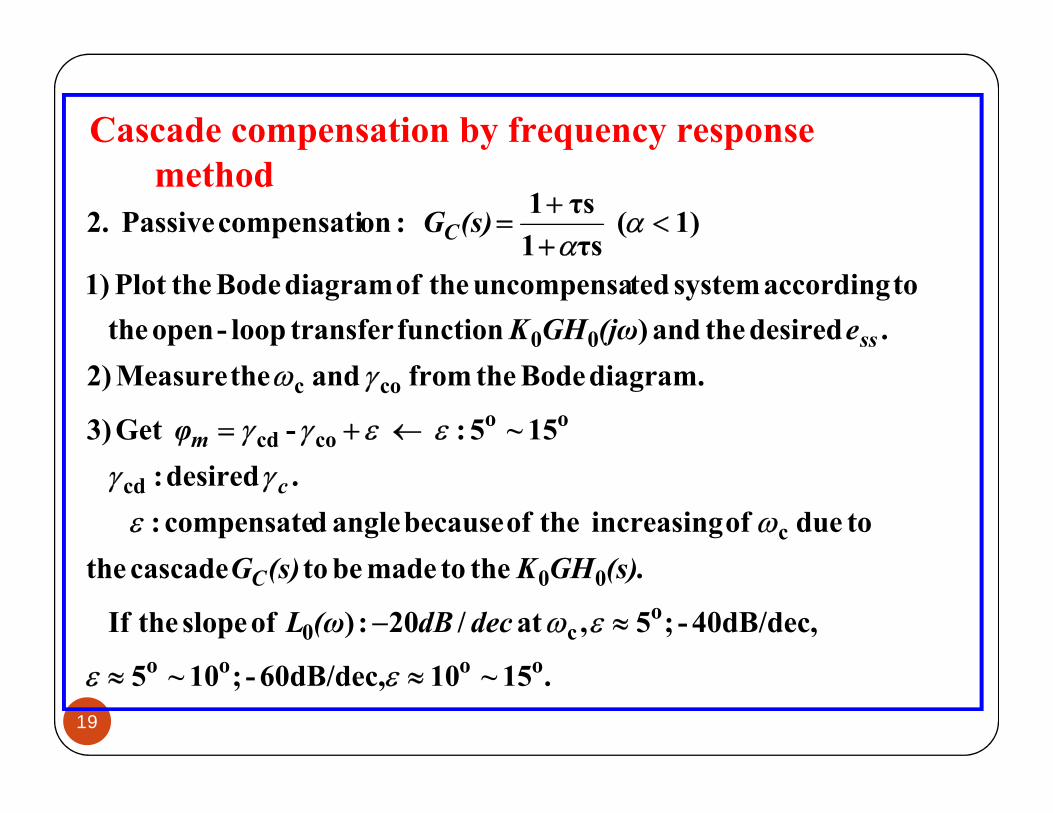
diagram.BodethefromandtheMeasure2)
.desiredtheand)functiontransfer loop-openthe
toaccordingsystemteduncompensatheofdiagramBodethePlot 1)
1)( τs1
τs1 :oncompensatiPassive2.
oo
coc
00
e(jωGHK
(s)G
ss
C
Cascade compensation by frequency responsemethod
19
.15~1060dB/dec,-;10~5
40dB/dec,-;5,at /20:)ofslopetheIf
.thetomadebetocascadethe
todueofincreasing theofbecauseangledcompensate:
.desired:
15~5: -Get 3)
oooo
oc0
00
c
cd
oococd
decdB(ωL
(s)GH K(s)G
φ
C
c
m

:fromget becanhere
1 :formulathefromget 5)
sin1
sin1get
1
1sinfrom4)
m
m
m1m
m
φ
φφ
Cascade compensation by frequency responsemethod
20
etc.theexamining
theofdiagramBodetheplot 6)
lglg
:fromget becanhere m
CC
c
ωω
,γω
(s) G(s)GHK
α(jw)GHKm
00
00 1020

Example:
thefor ionsspecificat,functiontransfer loop-Open 21
S
KGH(s)
))((. ; ; :aresystem cc20
2
1101045 ttress
Cascade compensation by frequency response method
solution: --40dB/deccGlg20
21
10
cGlg20
).( 10101 sseK
1631000 . ;
Fig.6.4.1.inshownisdiagramBodeThe
c c
τs
τs(s) Gc
1
1 :oncompensatilead-phase theusemust We
10atangleaddand c 45

Cascade compensation by frequency response method
--40dB/dec
10
cGlg20)180)()((
450045 o
oooo0m
jGH
φ ccd
17.0 sin1
sin1
om 45
m
m
24.0 101
cm
22
dBdBjGH 4.15log2020)(log20but
17.010
)7.14.1520lg20(
7.1and041.01
24.01 makeweSo
cc
ccc
KK
Ks
sKG

Phase-Lag Compensation using Bode diagram
)s.s
K
ss
K GH(jω v
1502
()()
:functiontransfer teduncompensaThe
.and,45 marginPhase
:aresystemthefor ionsSpecificat
c 20 vK
Example:
2
6.32--20dB/dec
--40dB/dec--900
--20lgβ
23
r.compensatotheDtermine
1 ,1
1(s):on compensatilag-phase theusecan We
6.32at 20
shown issystemteduncompensa theofdiagramBodeThe
cc
s
sGc
020c
--900
--1800
solution:

oo130)(where1.5frequencythelocateWe 50 cc φ
1020log20dB
20dBisat nattenuatiorequiredThe
.20)(lg 1.5, At
c
.c
dBjGH51
20
Phase-Lag Compensation using Bode diagram
2
6.32--20dB/dec
--40dB/dec--900
--20lgβ
24
s
ssG
c
7.661
67.61)(67.6
r)compensatolag-phasethefor at error 5Allowing(Consider
15.010
1 :Make
c
020c
90
--1800
Validate……

Phase-Lag Compensation using Bode diagram
Steps of the phase-lag compensation:
1
)(log200log2 :fromGet 3)
t.requirementhesatisfyhichFind2)
.desiredtheand)functiontransfer loop-openthe
toaccordingsystemteduncompensatheofdiagramBodethePlot 1)
cc
00
jGH
w
e(jωGHK ss
c
25
etc.andionsspecificatthe
validatetosystemdcompensatetheofdiagramBodethePlot )5
.get to)105:(1
Make)4
cc
~kk
c

Phase-Lag-lead Compensation using Bode diagram
Compensation according to the desired frequency response
Example
First: make the phase-lag compensation-to satisfy ess
and compensate a part of γc .
Second: make the phase-lead compensation-to satisfy the requirementsγc and ωc etc.
26
Example
device.on compensatiseries thedetermine
)1(
1
:issystemteduncompensa theoffunction transfer loop-open theIf
shownisresponsefrequency desiredThe
ssGH(s)
solution
10
100--2020dB/dec
--4040dB/dec

Compensation according to the desired frequency responseCompensation according to the desired frequency response
In terms of the desired frequency response we have:
)101.0(
10)()()(
sssGHsGsGH cdesire
)()(
1
1
sssGH
27
10
100--2020dB/dec
--4040dB/dec).(
)(
)().()(
)()(
1010
110
11
101010
s
s
sssssGH
sGHsG desire
c

1
andsystem)phase
(minimumshown issystemaof
responsefrequency loop-opendesiredThe
GH(s) 100--2020dB/dec
--4040dB/dec
Exercise:
28
system.
teduncompensa theandsystemdcompensate
ebetween theperformanc thecompareand
deviceon compensaticascade theDetermine
)1(
ssGH(s)
10
100
--4040dB/dec
1


















