
ANALISE DE MODELOS DE CORES PARA DETECC˘ AO DE ... · 85% para detec˘c~ao do capacete. Observa-se...
8
AN ´ ALISE DE MODELOS DE CORES PARA DETEC¸ C ˜ AO DE MOTOCICLISTAS SEM CAPACETE EM IMAGENS Romuere Silva, Kelson Aires, Rodrigo Veras, Alcilene Sousa * * Universidade Federal do Piau´ ı Piau´ ı, Brasil Abstract— Motorcycles are widely used, they are one of the main means of transportation in many countries. The helmet is the main safety equipment of motorcyclists, and its use is mandatory in Brazil, but many motorcyclists do not use it or use it incorrectly. This paper analizes four color models (RGB, HSI, HSV, YCbCr) to be used in feature extraction and image classification. The Local Binary Pattern (LBP)algorithm was used in feature extraction and the algorithm Support Vector Machine (SVM) was used in image classification. The best results were obtained by V band from the HSV color space with an accuracy rate of 0.8941 and Kappa index of 0.7778. Keywords— Motorcycle, Helmet, Color model. Resumo— Motocicletas s˜ ao amplamente utilizadas em v´arios pa´ ıses, sendo este um dos principais meios de transporte. O principal equipamento de seguran¸ca do motociclista´ e o capacete. Apesar de seu uso ser obrigat´orio muitos motociclistas n˜ ao o utilizam ou o utilizam de forma errada. Este trabalho tem por objeto fazer uma an´alise de modelos de cor para ser utilizado na extra¸c˜ao de caracter´ ısticas e posterior classifica¸c˜ao de imagens de motociclistas. Foram utilizadas imagens est´ aticas capturadas em vias p´ ublicas. O algoritmo Padr˜ aoBin´ario Local (Local Binary Pattern - LBP) foi utilizado na extra¸c˜ ao de atributos das imagens. O algoritmo M´aquina de Vetor de Suporte (Support Vector Machine - SVM) foi utilizado na classifica¸c˜ao das imagens. O melhor resultado foi obtido utilizando a componente V (brilho) do modelo de cores HSV, a acur´acia foi de 0,8941 e o´ ındice Kappa foi de 0,7778. Keywords— Motociclista, Capacete, Modelos de cor. 1 Introdu¸c˜ ao As motocicletas s˜ ao um dos meios de transporte mais utilizados no mundo. As principais vantagens em rela¸ c˜ ao a outros ve´ ıculos s˜ ao: o pre¸co baixo e o custo de opera¸ c˜ ao menor. Na ´ ultima d´ ecada, verificou-se um aumento no n´ umero de acidentes envolvendo motocicletas. Em 2011, de acordo com o Departamento Nacional de Infraestrutura de Transportes (DNIT), o Brasil teve um total de 34.635 motos envolvidas em acidentes (DNIT, 2011). De acordo com um estudo sobre violˆ encia no trˆ ansito (Waiselfisz, 2013) o n´ umero de mortes no mesmo ano foi de 14.666. O principal equipamento de seguran¸ca dos motociclistas ´ e o capacete. Embora o uso do capacete seja obrigat´ orio, muitos motociclistas n˜ ao o utilizam ou fazem uso de forma incorreta. Segundo o Departamento de Transportes dos EUA, em 2011, apenas 66% dos motociclistas utilizaram capacete de acordo com a lei (NHTSA, 2011). Estat´ ısticas dos Centros de Controle e Preven¸c˜ ao de Doen¸cas dos EUA comprovam que o n˜ ao uso do capacete resulta em maiores taxas de mortalidade no trˆ ansito. Este trabalho tem por objetivo analisar os principais modelos de cores na detec¸c˜ ao de motociclistas sem capacete. Para isso, foram utilizadas imagens est´ aticas de trˆ ansito. Al´ em disso, o algoritmo Padr˜ ao Bin´ ario Local (Local Binary Pattern - LBP) foi utilizado para extra¸ c˜ ao de atributos nas imagens e o classificador M´aquina de Vetor de Suporte (Support Vector Machine - SVM). 1.1 Trabalhos Relacionados Nos ´ ultimos anos, diversos trabalhos foram realizados em an´ alise de tr´ afego em vias p´ ublicas, incluindodetec¸c˜ ao,classifica¸c˜ ao e contagem de ve´ ıculos, e detec¸c˜ ao de capacete. A seguir s˜ ao mostrados alguns trabalhos relacionados ` a detec¸c˜ ao de capacete. Chiu et al. (2007) propuseram um sistema de vis˜ ao computacional com o objetivo de detectar e rastrear motocicletas parcialmente obstru´ ıdas por outro ve´ ıculo. Nesse trabalho foi considerado que a presen¸ca do capacete identifica a presen¸ca de uma motocicleta. O sistema parte do pr´ e-suposto que a regi˜ ao do capacete possui forma similar a um c´ ırculo. A fim de detectar a presen¸ ca do capacete, as bordas da imagem s˜ ao calculadas sobre a poss´ ıvel regi˜ ao do mesmo, ou seja a regi˜ ao onde a motocicleta est´ a. Ap´ os isso, ´ e feita uma contagem da quantidade de pontos de borda que s˜ ao semelhantes a um c´ ırculo. Caso essa quantidade seja igual ou maior a um valor pr´ e-definido na calibra¸c˜ ao do sistema, essa regi˜ ao ir´ a corresponder a um capacete. Caso o sistema detecte um capacete significa que no mesmo local existe uma motocicleta. Na sua fase de calibra¸ c˜ ao, o sistema necessita de alguns parˆ ametros a serem informados pelo operador do sistema, tais como: raio do capacete, ˆ angulo e altura da cˆ amera. Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 2540
Transcript of ANALISE DE MODELOS DE CORES PARA DETECC˘ AO DE ... · 85% para detec˘c~ao do capacete. Observa-se...
ANALISE DE MODELOS DE CORES PARA DETECCAO DE MOTOCICLISTAS SEMCAPACETE EM IMAGENS
Romuere Silva, Kelson Aires, Rodrigo Veras, Alcilene Sousa∗
∗Universidade Federal do PiauıPiauı, Brasil
Abstract— Motorcycles are widely used, they are one of the main means of transportation in many countries.The helmet is the main safety equipment of motorcyclists, and its use is mandatory in Brazil, but manymotorcyclists do not use it or use it incorrectly. This paper analizes four color models (RGB, HSI, HSV, YCbCr)to be used in feature extraction and image classification. The Local Binary Pattern (LBP)algorithm was used infeature extraction and the algorithm Support Vector Machine (SVM) was used in image classification. The bestresults were obtained by V band from the HSV color space with an accuracy rate of 0.8941 and Kappa index of0.7778.
Keywords— Motorcycle, Helmet, Color model.
Resumo— Motocicletas sao amplamente utilizadas em varios paıses, sendo este um dos principais meios detransporte. O principal equipamento de seguranca do motociclista e o capacete. Apesar de seu uso ser obrigatoriomuitos motociclistas nao o utilizam ou o utilizam de forma errada. Este trabalho tem por objeto fazer umaanalise de modelos de cor para ser utilizado na extracao de caracterısticas e posterior classificacao de imagensde motociclistas. Foram utilizadas imagens estaticas capturadas em vias publicas. O algoritmo Padrao BinarioLocal (Local Binary Pattern - LBP) foi utilizado na extracao de atributos das imagens. O algoritmo Maquina deVetor de Suporte (Support Vector Machine - SVM) foi utilizado na classificacao das imagens. O melhor resultadofoi obtido utilizando a componente V (brilho) do modelo de cores HSV, a acuracia foi de 0,8941 e o ındice Kappafoi de 0,7778.
Keywords— Motociclista, Capacete, Modelos de cor.
1 Introducao
As motocicletas sao um dos meios de transportemais utilizados no mundo. As principaisvantagens em relacao a outros veıculos sao:o preco baixo e o custo de operacao menor.Na ultima decada, verificou-se um aumento nonumero de acidentes envolvendo motocicletas. Em2011, de acordo com o Departamento Nacional deInfraestrutura de Transportes (DNIT), o Brasilteve um total de 34.635 motos envolvidas emacidentes (DNIT, 2011). De acordo com umestudo sobre violencia no transito (Waiselfisz,2013) o numero de mortes no mesmo ano foi de14.666.
O principal equipamento de seguranca dosmotociclistas e o capacete. Embora o uso docapacete seja obrigatorio, muitos motociclistasnao o utilizam ou fazem uso de forma incorreta.Segundo o Departamento de Transportes dosEUA, em 2011, apenas 66% dos motociclistasutilizaram capacete de acordo com a lei (NHTSA,2011). Estatısticas dos Centros de Controle ePrevencao de Doencas dos EUA comprovam queo nao uso do capacete resulta em maiores taxasde mortalidade no transito.
Este trabalho tem por objetivo analisar osprincipais modelos de cores na deteccao demotociclistas sem capacete. Para isso, foramutilizadas imagens estaticas de transito. Alemdisso, o algoritmo Padrao Binario Local (LocalBinary Pattern - LBP) foi utilizado para extracaode atributos nas imagens e o classificador Maquina
de Vetor de Suporte (Support Vector Machine -SVM).
1.1 Trabalhos Relacionados
Nos ultimos anos, diversos trabalhos foramrealizados em analise de trafego em vias publicas,incluindo deteccao, classificacao e contagem deveıculos, e deteccao de capacete. A seguirsao mostrados alguns trabalhos relacionados adeteccao de capacete.
Chiu et al. (2007) propuseram um sistema devisao computacional com o objetivo de detectar erastrear motocicletas parcialmente obstruıdas poroutro veıculo. Nesse trabalho foi considerado quea presenca do capacete identifica a presenca deuma motocicleta. O sistema parte do pre-supostoque a regiao do capacete possui forma similar aum cırculo. A fim de detectar a presenca docapacete, as bordas da imagem sao calculadassobre a possıvel regiao do mesmo, ou seja aregiao onde a motocicleta esta. Apos isso, efeita uma contagem da quantidade de pontos deborda que sao semelhantes a um cırculo. Casoessa quantidade seja igual ou maior a um valorpre-definido na calibracao do sistema, essa regiaoira corresponder a um capacete. Caso o sistemadetecte um capacete significa que no mesmo localexiste uma motocicleta. Na sua fase de calibracao,o sistema necessita de alguns parametros a sereminformados pelo operador do sistema, tais como:raio do capacete, angulo e altura da camera.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2540

Chiverton (2012) descreveu e testouum sistema de rastreamento e classificacaoautomatica de motociclistas com e sem capacete.O sistema utiliza o classificador SVM, que etreinado com os vetores de atributos do descritorHistograma de Orientacao dos Gradientes(Histogram of Oriented Gradients - HOG) (Dalale Triggs, 2005). O descritor HOG e executadocom o operador de Sobel (Sobel, 1970) parao calculo das bordas com uma vizinhanca de3 × 3 pixels. Para o calculo do plano de fundoo algoritmo proposto em (Zivkovic, 2004) eutilizado. Na extracao dos histogramas saoutilizadas fotografias estaticas e quadros deimagem individuais a partir dos dados de vıdeo.O metodo obteve uma uma taxa de acerto totalde 83% para classificacao de motocicletas e85% para deteccao do capacete. Observa-se notrabalho que a quantidade de imagens na fase detestes e pouca.
O trabalho mais recente sobre deteccao do usode capacete foi proposto por Waranusast et al.(2013). Nesse trabalho e feita uma classificacaoutilizando informacoes geometricas da regiao dacabeca e informacoes de cor. Esses atributos saoutilizados pelo classificador KNN para classificaras imagens de pessoas com capacete e semcapacete. Alem disso, o sistema faz a contagemde passageiros na motocicleta. Segundo osautores, a fase de contagem de passageiros teveum total de 83,82% de acerto. Na fase dedeteccao do capacete, a taxa de acerto foi de 89%.Vale destacar que para essa fase as imagens daregiao da cabeca foram recortadas manualmente.Observou-se que as imagens utilizadas foramcapturadas perpendiculares a camera, ou seja asimagens sao das laterais das motocicletas. Issotorna o sistema falho, visto que e impossıvelcapturar a placa do veıculo nessa posicao. Aoutilizar as imagens dessa forma, a identificacao demais de uma pessoa na motocicleta e facilitada. Omotivo disso e que caso as imagens tivessem sidocapturadas em outro angulo provavelmente umadas pessoas na motocicleta iria sobrepor a outra,gerando uma oclusao.
2 Materiais e Metodos
Nesta secao e descrita a base de imagens utilizada.Alem disso, sao descritos os algoritmos utilizadospara extracao de caracterısticas das imagens eclassificacao das imagens.
2.1 Base de Imagens
A base de imagens e composta por imagensestaticas. As imagens foram capturadas em umalocalidade onde a quantidade de motociclistas semcapacete era equilibrada em relacao a quantidadede motociclistas com capacete. Uma camara de
vıdeo CCD foi utilizada. A base de imagens estaassim distribuıda:
• 151 imagens de motociclistas com-capacete; e
• 104 imagens de motociclistas sem-capacete.
A Figura 1 mostra exemplos de imagens.
Figura 1: Exemplo de imagens que compoe a base.
2.2 Sistemas de Cores
O objetivo dos modelos de cores e permitira especificacao de cores em um formatopadronizado. Um modelo de cores e umarepresentacao n-dimensional, onde cada pixelda imagem e representado por um ponto que,geralmente, possui tres coordenadas.
RGB: O modelo RGB e baseado em um sistemade coordenadas cartesianas. Esse modelo de core formado por tres componentes. A primeiracomponente e a vermelha (Red - R), a segundae a verde (Green - G) e a terceira e a azul(Blue- B). A Figura 2 mostra uma imagem da base deimagens e suas componentes no modelo de coresRGB.
(a) (b) (c) (d)
Figura 2: Componentes do modelo de cor RGB.(a) Imagem original. (b) Componente vermelha.(c) Componente verde. (d) Componente azul.
HSV: O modelo de cor HSV e definido portres componentes: matiz (Hue - H), saturacao(Saturation - S) e brilho (Value - V). O matizdetermina a cor ou tonalidade. O brilho determinaa intensidade percebida (cor mais clara ou maisescura). A saturacao determina a pureza dacor. A Figura 3 mostra uma imagem da base deimagens e suas componentes no modelo de coresHSV.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2541

(a) (b) (c) (d)
Figura 3: Componentes do modelo de cor HSV.(a) Imagem original. (b) Componente de matiz.(c) Componente de saturacao. (d) Componentede brilho.
HSI: O modelo HSI permite separar ascomponentes de matiz (Hue - H), saturacao(Saturation - S) e intensidade (Intensity - I)dainformacao de cor em uma imagem. A Figura 4mostra uma imagem da base de imagens e suascomponentes no modelo de cores HSI.
(a) (b) (c) (d)
Figura 4: Componentes do modelo de cor HSI.(a) Imagem original. (b) Componente de matiz.(c) Componente de saturacao. (d) Componentede intensidade.
YCbCr: Os componentes do modelo de corYCbCr sao: luminancia (Y), crominancia dadiferenca azul (diferenca entre a componente azule um valor de referencia) (Cb) e crominancia dadiferenca vermelha (Diferenca entre a componentevermelha e um valor de referencia) (Cr). AFigura 5 mostra uma imagem da base de imagense suas componentes no modelo de cores YCbCr.
(a) (b) (c) (d)
Figura 5: Componentes do modelo de corYCbCr. (a) Imagem original. (b) Componentede luminancia. (c) Crominancia da diferenca azul.(d) Crominancia da diferenca vermelha.
2.3 Padrao Binario Local - LBP
O descritor Padrao Binario Local (Local BinaryPattern - LBP) tem um bom desempenho emdiversas aplicacoes, incluindo a classificacao esegmentacao de textura, recuperacao de imagens,e inspecao de superfıcie (Guo et al., 2010;Suruliandi et al., 2012; Zhao et al., 2012).
O descritor LBP original (Ojala et al., 1996)rotula os pixels de uma imagem em nıveis decinza por limiarizacao. O valor do limiar eo pixel central da janela de vizinhanca 3 × 3.Cada pixel e comparado com o pixel central e oresultado final e considerado um numero binario.Esse procedimento e feito para todas as janelasescolhidas da imagem. Apos todas as janelasserem computadas, o vetor de caracterısticas emontado com a juncao dos valores obtidos. AFigura 6 ilustra o processo.
(a) (b) (c)
Figura 6: Exemplo de calculo do descritor LBP.(a) Exemplo de janela. (b) Limiarizacao baseadano pixel central. (c) Padrao calculado a partir doresultado da limiarizacao.
Apos a limiarizacao, um histograma da celulae calculado, ou seja, as quantidades de “0” e “1”sao calculadas. As caracterısticas mais relevantesdo descritor LBP sao a sua tolerancia a mudancasde iluminacao e sua simplicidade computacional.
2.4 Maquina de Vetor de Suporte - SVM
Os estudos sobre SVM foram introduzidos porVapnik (Cortes e Vapnik, 1995). De um modogeral, a SVM faz um mapeamento do espacode entrada para um espaco de dimensionalidademaior. Em seguida, e calculado um hiperplanode separacao otimo. O hiperplano de separacaootimo e escolhido de modo a maximizar a distanciade separacao entre as classes (Haykin, 2001).Diz-se que duas classes sao linearmente separaveisse existe um hiperplano que separe as mesmas.A Figura 7 mostra duas classes linearmenteseparaveis e seu hiperplano de separacao otimo.
Hiperplano de separação ótimo
Vetores deSuporte
Figura 7: Hiperplano de separacao otimo paraclasses linearmente separaveis.
A SVM e uma tecnica de aprendizagemsupervisionada, que possui as fases de treinamentoe teste. Na fase de treinamento, atributos e saıdasdesejadas sao dadas a fim de projetar os vetoresde suporte. Os vetores de suporte sao utilizados
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2542

para obter um classificador. Na fase de teste, oclassificador e utilizado para encontrar uma saıdaa partir de um vetor de entrada.
Ao utilizar SVM para reconhecimento depadroes, se faz necessario tornar uma funcaonao-linearmente separavel em uma funcaolinearmente separavel. Para isso, e necessarioque seja aumentada a dimensionalidade doproblema (Cover, 1965). As funcoes queaumentam a dimensionalidade do espaco deentrada sao chamadas Funcoes de Kernel.Algumas das principais Funcoes de Kernel saomostradas na Equacao 1.
Polinomial: (xTxi + 1)p
RBF: exp(− 1
2σ2‖x− xi‖2)
Perceptron: tanh(β0xTxiβ1)
(1)
As funcoes de Kernel sao aplicadas nos vetoresde entrada. Ao aplicar uma Funcao de Kernel emum vetor de entrada de dimensao N , e obtido umnovo vetor de dimensao X, onde X e maior queN. Apos isso, o calculo dos vetores de suporte efeito. Com os vetores calculados e possıvel definiro hiperplano de separacao otimo. Ele estara auma igual distancia (ρ0) dos vetores de suportede cada classe, como mostrado na Figura 7. Umnovo objeto e classificado utilizando o hiperplanootimo, cada lado do hiperplano representa umaclasse diferente.
3 Proposta
A Figura 8 mostra o fluxograma do metodoproposto. A partir de uma imagem e calculadauma regiao de interesse. O proximo passo euma serie de pre-processamentos. Uma subjanelada regiao de interesse e calculada. O passoseguinte e onde esse trabalho se concentra, adeterminacao do canal de cor a ser utilizado pararealizar a extracao de atributos e posteriormentea classificacao.
3.1 Determinacao da Regiao de Interesse - RoI
A determinacao da Regiao de Interesse (Region ofInterest - RoI) e um importante passo do sistemaproposto. Com o uso dessa regiao, e possıvelreduzir a area onde a busca sera feita. Issoimplica em menos processamento e uma maiorprecisao nos resultados em relacao a imagemcompleta. Como o interesse do sistema propostoe a deteccao de motociclistas sem capacete, enecessario que a regiao da cabeca do motociclistaesteja totalmente dentro da RoI. Para a definicaoda RoI foi utilizada a parte superior da imagem(1/5 da imagem), como mostrado na Figura 9.Tal valor foi escolhido empiricamente, atraves detestes.
h
h/5
Figura 9: Exemplo de calculo da RoI. A regiaodelimitada pelo retangulo corresponde a RoI. Oparametro h e a altura da imagem
O tamanho da RoI foi testado em toda a basede imagens. Em todas as imagens de motociclistasa regiao da cabeca esta dentro da RoI selecionada.A Figura 10 mostra algumas RoIs.
Figura 10: Exemplos de RoIs computadas a partirde imagens de motociclistas capturados na fase desegmentacao de objetos.
3.2 Pre-Processamento e Calculo da Sub-Janela
Antes de calcular o descritor e feito umpre-processamento, que tem como finalidadeencontrar uma sub-janela que corresponda aregiao da cabeca do motociclista.
Primeiramente, foi calculada a imagem emnıveis de cinza (N) da RoI. Foi utilizado o nıvelde cinza mais comum na literatura. O mesmo ecomputado pela Equacao 2,
N = 0.2989 ∗R+ 0.5870 ∗G+ 0.1140 ∗B, (2)
onde, R, G e B sao as componentes do modelo decor RGB.
Um filtro da media, com vizinhanca 5 ×5, foi aplicado na imagem em tons de cinzapara reduzir os ruıdos da imagem. Em seguida,o limiar de Otsu (Otsu, 1979) e calculado.Esse limiar e aplicado na imagem em nıveis decinza para obter uma imagem binaria (preta ebranca). A Figura 11(c) mostra o resultado desse
processamento. E aplicado na imagem binaria oalgoritmo de Sobel (Sobel, 1970). Esse algoritmotem como resultado as bordas da imagem. Oresultado da aplicacao do operador de Sobel podeser visto na Figura 11(d).
Apos o pre-processamento, foi utilizada atransformada circular de Hough (circular Hough
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2543

Região de Interesse
Pré-Processamento
Determinação da Sub-Janela
Canal de CorExtração de
AtributosClassificação
Figura 8: Fluxograma do metodo proposto.
transform - (CHT)) para calcular os possıveiscırculos na imagem. A CHT foi utilizada poisa regiao do capacete e da cabeca (motociclistasem capacete) tem forma similar a um cırculo.O resultado desse processamento sao os possıveiscırculos da imagem. Na RoI, formas circulares iraocorresponder a regiao da cabeca ou do capacete domotociclista.
A partir dos cırculos encontrados, uma buscapelo melhor deles e feita (cırculo com maispontos). A Figura 11(e) mostra o melhor cırculoencontrado em uma RoI.
O passo seguinte e o calculo da sub-janelaque ira corresponder ao quadrado circunscrito acircunferencia encontrada (Figura 11(f)). Essasub-janela sera utilizada na extracao de atributos.A Figura 11 mostra os passos para o calculo dasub-janela.
4 Canal de Cor
Apos o calculo das sub-janelas foram testadosvarios modelos de cores para serem utilizados nocalculo do vetor de atributos da imagem. Essaetapa se mostrou de suma importancia, visto que,dependendo do canal de cor e do modelo de coros resultado mudaram significativamente. Foramtestados, neste trabalho, os modelos RGB, HSI,HSV e YCbCr.
Cada componente de cada modelo de corcitado, foi utilizado nos testes desse trabalho.
4.1 Extracao de Atributos e Classificacao
Nesta fase foi utilizado o classificador SVM.A tarefa de classificacao das imagens consisteem diferenciar as imagens em duas classes:com-capacete e sem-capacete.
Para cada sub-janela gerada foi obtido umvetor de atributos utilizando o descritor LBP.
5 Metodologia de Avaliacao dosResultados
Para avaliar a classificacao foram utilizadasalgumas metricas conhecidas na literatura. Nessa
secao sao mostradas as metricas de avaliacao dosresultados utilizadas nesse trabalho.
Matriz de Confusao A matriz de confusaoe uma tabela que mostra o resultado daclassificacao, comparando-o com o resultado real.A matriz, nesse trabalho, e composta por 4valores: Verdadeiro Positivo (VP), Falso Positivo(FP), Falso Negativo (FN) e Verdadeiro Negativo(VN). Tais valores sao obtidos a partir doresultado da classificacao. Supondo a existenciade duas classes hipoteticas: classe X e classe Y,sao computados os seguintes valores:
• VP: numero de objetos da classe Xclassificados como da classe X;
• FP: numero de objetos da classe Yclassificados como X;
• FN: numero de objetos da classe Xclassificados como Y;
• VN: numero de objetos da classe Yclassificados como sendo da classe Y.
A partir dessas quantidades os valoresde Especificidade (E) (Equacao 3), ValorPreditivo Negativo (VPN) (Equacao 4), Precisao(P) (Equacao 5), Recall (R) (Equacao 6),Acuracia (A) (Equacao 7), F-Measure (FM)
(Equacao 8) e Indice Kappa (K) (Equacao 3) saocalculados (Powers, 2007).
E =V N
V N + FP(3)
V PN =V N
V N + FN(4)
P =V P
V P + FP(5)
R =V P
V P + FN(6)
A =V P + V N
V P + FP + FN + V N(7)
FM =2 ∗R ∗ PR+ P
(8)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2544

(a)
(b)
(c)
(d)
(e)
(f)
Figura 11: Passos para deteccao de motociclistassem capacete. (a) RoI. (b) Nıvel de cinza. (c)Imagem binaria. (d) Bordas calculadas. (e)Melhor cırculo encontrado pela CHT, desenhadona RoI. (f) Sub-janela.
5.1 Indice Kappa - K
O ındice Kappa e utilizado como uma medidaapropriada da exatidao por representarinteiramente a matriz de confusao. Ele tomatodos os elementos da matriz em consideracao,ao inves de apenas aqueles que retratam aquantidade de classificacoes verdadeiros, o queocorre quando se calcula a exatidao global daclassificacao (Rosenfield e Fitzpatrick-lins, 1986).
O ındice Kappa e um coeficiente deconcordancia para escalas nominais que mede orelacionamento entre a concordancia, alem dacasualidade, e a discordancia esperada (Rosenfielde Fitzpatrick-lins, 1986). O ındice Kappa pode serencontrado com base na Equacao 9:
K =θ1 − θ21− θ2
, (9)
onde,
θ1 =V P + V N
V P + V N + FP + FN, (10)
e
θ2 =α+ β
γ2. (11)
onde α = (V P + FN) ∗ (V P + FP ), β = (V N +FN)∗(V N+FP ) e γ = (V P+V N+FP+FN) Aavaliacao dos classificadores foi realizada atravesdo ındice Kappa obtido para cada um deles. Onıvel de exatidao do ındice Kappa foi classificadoconforme a Tabela 1, de acordo com o estabelecidopor Landis e Kock (J. e G., 1977).
Tabela 1: Nıvel de exatidao de uma classificacao,conforme o valor de ındice Kappa.
Indice Kappa (K) QualidadeK ≤ 0.2 Ruim
0.2 ≤ K ≤ 0.4 Razoavel0.4 ≤ K ≤ 0.6 Bom0.6 ≤ K ≤ 0.8 Muito Boa
K ≥ 0.8 Excelente
6 Resultados e Discussao
O metodo estatıstico k-fold cross-validation (k =10) foi utilizado para gerar os resultados nafase de classificacao. No 10-fold cross-validation,o conjunto de dados originais e aleatoriamenteparticionado em 10 subconjuntos de dados como mesmo tamanho. A partir dos 10 subconjuntos,um unico subconjunto e escolhido como conjuntode validacao para testar o modelo, e os 9subconjuntos restantes sao utilizados como dadosde treinamento. O processo de cross-validatione, entao, repetido 10 vezes. Cada um dos 10subconjuntos e utilizado somente uma vez paravalidacao dos dados. E obtida a media dos 10resultados gerados para produzir uma estimacaounica. A vantagem desse metodo e que todos ossubconjuntos sao utilizados tanto para teste comopara treino, e cada subconjunto e utilizado parateste somente uma vez. A seguir sao mostrados osresultados obtidos.
O SVM foi executado utilizando uma funcaode kernel linear. O resultado utilizando essekernel foi melhor quando foram comparados comos kernels polinomial, de base radial e tangentesigmoide. Para o descritor LBP a imagem foidividida em 9 janelas. Cada janela correspondeu aum histograma dos valores computados, ou seja,ao final obteve-se 9 histogramas. A vizinhancapara a computacao dos padroes foi de 3× 3.
A Tabela 2 mostra o resultado da classificacaoutilizando o metodo proposto com o canal de corRGB. Pode-se observar que no canal vermelhoos resultados foram melhores. O ındice Kappaclassificou o resultado como“Muito bom”(0, 7613)e a acuracia chegou a 0, 8863. O canal de cor azulse mostrou inferior em relacao aos demais.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2545
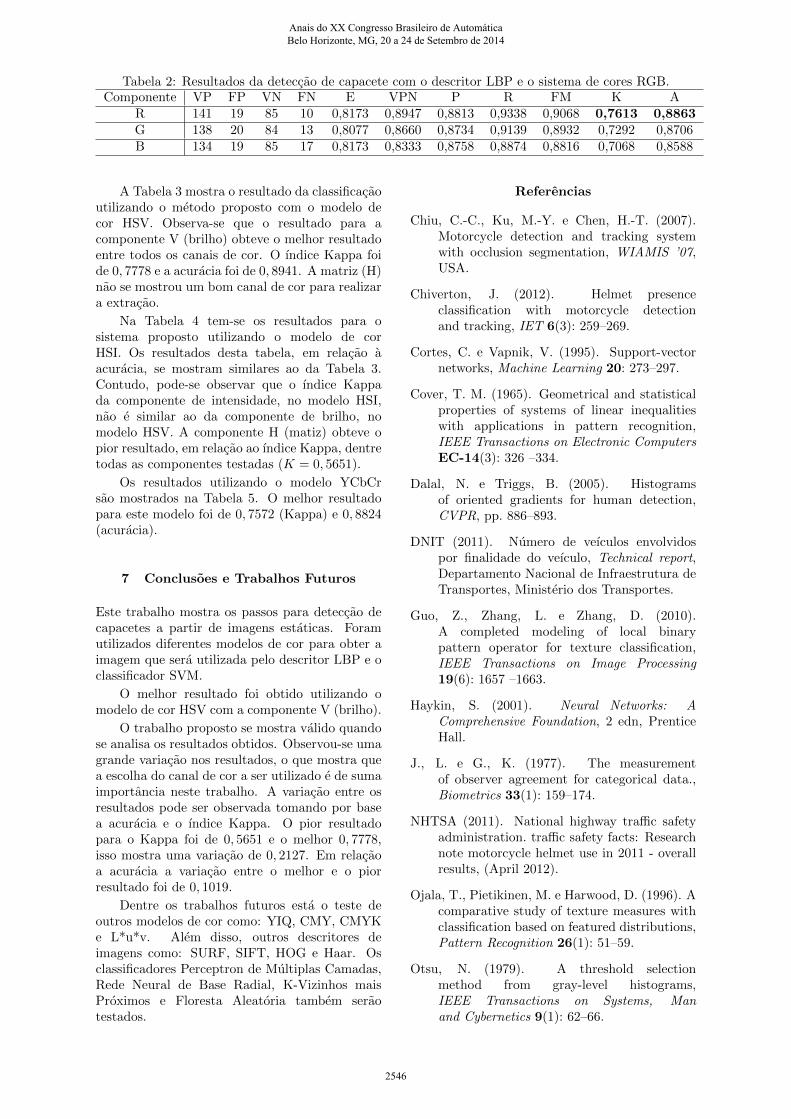
Tabela 2: Resultados da deteccao de capacete com o descritor LBP e o sistema de cores RGB.Componente VP FP VN FN E VPN P R FM K A
R 141 19 85 10 0,8173 0,8947 0,8813 0,9338 0,9068 0,7613 0,8863G 138 20 84 13 0,8077 0,8660 0,8734 0,9139 0,8932 0,7292 0,8706B 134 19 85 17 0,8173 0,8333 0,8758 0,8874 0,8816 0,7068 0,8588
A Tabela 3 mostra o resultado da classificacaoutilizando o metodo proposto com o modelo decor HSV. Observa-se que o resultado para acomponente V (brilho) obteve o melhor resultadoentre todos os canais de cor. O ındice Kappa foide 0, 7778 e a acuracia foi de 0, 8941. A matriz (H)nao se mostrou um bom canal de cor para realizara extracao.
Na Tabela 4 tem-se os resultados para osistema proposto utilizando o modelo de corHSI. Os resultados desta tabela, em relacao aacuracia, se mostram similares ao da Tabela 3.Contudo, pode-se observar que o ındice Kappada componente de intensidade, no modelo HSI,nao e similar ao da componente de brilho, nomodelo HSV. A componente H (matiz) obteve opior resultado, em relacao ao ındice Kappa, dentretodas as componentes testadas (K = 0, 5651).
Os resultados utilizando o modelo YCbCrsao mostrados na Tabela 5. O melhor resultadopara este modelo foi de 0, 7572 (Kappa) e 0, 8824(acuracia).
7 Conclusoes e Trabalhos Futuros
Este trabalho mostra os passos para deteccao decapacetes a partir de imagens estaticas. Foramutilizados diferentes modelos de cor para obter aimagem que sera utilizada pelo descritor LBP e oclassificador SVM.
O melhor resultado foi obtido utilizando omodelo de cor HSV com a componente V (brilho).
O trabalho proposto se mostra valido quandose analisa os resultados obtidos. Observou-se umagrande variacao nos resultados, o que mostra quea escolha do canal de cor a ser utilizado e de sumaimportancia neste trabalho. A variacao entre osresultados pode ser observada tomando por basea acuracia e o ındice Kappa. O pior resultadopara o Kappa foi de 0, 5651 e o melhor 0, 7778,isso mostra uma variacao de 0, 2127. Em relacaoa acuracia a variacao entre o melhor e o piorresultado foi de 0, 1019.
Dentre os trabalhos futuros esta o teste deoutros modelos de cor como: YIQ, CMY, CMYKe L*u*v. Alem disso, outros descritores deimagens como: SURF, SIFT, HOG e Haar. Osclassificadores Perceptron de Multiplas Camadas,Rede Neural de Base Radial, K-Vizinhos maisProximos e Floresta Aleatoria tambem seraotestados.
Referencias
Chiu, C.-C., Ku, M.-Y. e Chen, H.-T. (2007).Motorcycle detection and tracking systemwith occlusion segmentation, WIAMIS ’07,USA.
Chiverton, J. (2012). Helmet presenceclassification with motorcycle detectionand tracking, IET 6(3): 259–269.
Cortes, C. e Vapnik, V. (1995). Support-vectornetworks, Machine Learning 20: 273–297.
Cover, T. M. (1965). Geometrical and statisticalproperties of systems of linear inequalitieswith applications in pattern recognition,IEEE Transactions on Electronic ComputersEC-14(3): 326 –334.
Dalal, N. e Triggs, B. (2005). Histogramsof oriented gradients for human detection,CVPR, pp. 886–893.
DNIT (2011). Numero de veıculos envolvidospor finalidade do veıculo, Technical report,Departamento Nacional de Infraestrutura deTransportes, Ministerio dos Transportes.
Guo, Z., Zhang, L. e Zhang, D. (2010).A completed modeling of local binarypattern operator for texture classification,IEEE Transactions on Image Processing19(6): 1657 –1663.
Haykin, S. (2001). Neural Networks: AComprehensive Foundation, 2 edn, PrenticeHall.
J., L. e G., K. (1977). The measurementof observer agreement for categorical data.,Biometrics 33(1): 159–174.
NHTSA (2011). National highway traffic safetyadministration. traffic safety facts: Researchnote motorcycle helmet use in 2011 - overallresults, (April 2012).
Ojala, T., Pietikinen, M. e Harwood, D. (1996). Acomparative study of texture measures withclassification based on featured distributions,Pattern Recognition 26(1): 51–59.
Otsu, N. (1979). A threshold selectionmethod from gray-level histograms,IEEE Transactions on Systems, Manand Cybernetics 9(1): 62–66.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2546

Tabela 3: Resultados da deteccao de capacete com o descritor LBP e o sistema de cores HSV.Componente VP FP VN FN E VPN P R FM K A
H 127 29 75 24 0,7212 0,7576 0,8141 0,8411 0,8274 0,5665 0,7922S 134 16 88 17 0,8462 0,8381 0,8933 0,8874 0,8904 0,7325 0,8706V 142 18 86 9 0,8269 0,9054 0,8875 0,9404 0,9132 0,7778 0,8941
Tabela 4: Resultados da deteccao de capacete com o descritor LBP e o sistema de cores HSI.Componente VP FP VN FN E VPN P R FM K A
H 128 30 74 23 0,7115 0,7629 0,8101 0,8477 0,8285 0,5651 0,7922S 134 17 87 17 0,8365 0,8365 0,8874 0,8874 0,8874 0,7240 0,8667I 139 20 84 12 0,8077 0,8750 0,8742 0,9205 0,8968 0,7370 0,8745
Tabela 5: Resultados da deteccao de capacete com o descritor LBP e o sistema de cores YCbCr.Componente VP FP VN FN E VPN P R FM K A
Y 137 20 84 14 0,8077 0,8571 0,8726 0,9073 0,8896 0,7215 0,8667Cb 128 25 79 23 0,7596 0,7745 0,8366 0,8477 0,8421 0,6091 0,8118Cr 135 14 90 16 0,8654 0,8491 0,9060 0,8940 0,9000 0,7572 0,8824
Powers, D. M. W. (2007). Evaluation: FromPrecision, Recall and F-Factor to ROC,Informedness, Markedness & Correlation,Technical Report SIE-07-001, School ofInformatics and Engineering, FlindersUniversity, Adelaide, Australia.
Rosenfield, G. H. e Fitzpatrick-lins, K. A.(1986). A coefficient of agreement as ameasure of thematic classification accuracy,Photogrammetric Engineering and RemoteSensing 52: 223–227.
Sobel, I. E. (1970). Camara Models and MachinePerception, Ph.d dissertation, StanfordUniversity, Palo Alto, Calif.
Suruliandi, A., Meena, K. e Reena Rose, R.(2012). Local binary pattern and itsderivatives for face recognition, ICV 6(5): 480–488.
Waiselfisz, J. J. (2013). Mapa da violencia2013: Acidentes de transito e motocicleta,Technical report, Centro Brasileiro deEstudos Latino-Americanos.
Waranusast, R., Bundon, N., Timtong, V.,Tangnoi, C. e Pattanathaburt, P. (2013).Machine vision techniques for motorcyclesafety helmet detection, Image and VisionComputing New Zealand (IVCNZ), 201328th International Conference of, pp. 35–40.
Zhao, G., Ahonen, T., Matas, J. e Pietikainen,M. (2012). Rotation-invariant image andvideo description with local binary patternfeatures, IP 21(4): 1465 –1477.
Zivkovic, Z. (2004). Improved adaptive gaussianmixture model for background subtraction,ICPR 2004, Vol. 2, pp. 28 – 31 Vol.2.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2547














![trabalho escravo em ingles - ETH Z · trabalho análogo ao de escravo [ISBN 9789228244113;9789228244120 (web pdf)], Brasilia, 2010; and in Spanish: Las buenas prácticas de la inspección](https://static.fdocuments.in/doc/165x107/604e52fb722d827e3b7aaf52/trabalho-escravo-em-ingles-eth-z-trabalho-anlogo-ao-de-escravo-isbn-97892282441139789228244120.jpg)



