
Design, Modelling and Analysis of Multibody Dynamics of Light Motor Vehicle

An Introduction to Tire Modelling for Multibody Dynamics Simulation
SD 652 Professor John McPhee University of Waterloo

Acknowledgement:
Kevin Morency, Automatic Generation of Real-Time Simulation Code for Vehicle Dynamics using Linear Graph Theory and Symbolic Computing, MASc Thesis, University of Waterloo, 2007

SAE Axis System

ISO Axis System

Rolling Resistance (My)
Produced by hysteresis in tire tread and sidewall rubber
My = (Fz)(δx)
Normal force Fz is integral of the distributed load

Braking Force (Fx)
S = (V – wR) / V 0 < S < 1

Braking Force (Fx)
S = (V – wR) / V 0 < S < 1
Longitudinal Stiffness, CS, is the slope of the Fx vs. S curve at S=0

Driving Force (Fx)
S = (wR-V) / wR 0 < S < 1

Lateral Force (Fy) and Aligning Moment (Mz)

Lateral Force (Fy) and Aligning Moment (Mz)
Cornering Stiffness, Cα, is the slope of the Fy vs. α curve at α=0

Effect of Camber Angle (γ) on Lateral Force (Fy)

Combined Slip (Fx AND Fy)

Overturning Moment (Mx)

Characterizing a Pneumatic Tire: Physical Testing

Characterizing a Pneumatic Tire: Physical Testing

Consider how Fx varies with S: 20 data points
Data From Physical Tests
Consider how Fx varies with Fz and S: 202 =
400 data points
Consider how Fx varies with Fz, S,α, γ : 204 =
160 000 data points x5 = 800 000 data points

Tire Models: Mathematical Functions to Fit Measured Data
Fiala: 6 parameters needed to describe a tire •Easy to understand the physical significance of all parameters
•Simple force and moment equations. •Does not handle combined slip •Effects of normal force and camber are largely ignored.
Pacejka 2002 : 117 parameters needed •Very good fit to experimental data •More complicated force and moment equations

1. Define a point where tire forces and moments will act on the multibody model
How Tire Forces are Included In Multibody Vehicle Model
P2
P1
C2
C1

2. Determine an expression for the vertical tire force, Fz, which is required as an input to the tire model.
How Tire Forces are Included In Multibody Vehicle Model

3. Establish vector directions for longitudinal and lateral components of tire force.
How Tire Forces are Included In Multibody Vehicle Model

4. Determine kinematic inputs to tire model (S, γ, α)
5. Use a tire model to calculate Fx, Fy, Mx, My, Mz
How Tire Forces are Included In Multibody Vehicle Model

MapleSim Demo

The Fiala Tire Model The original tire model in MSC.ADAMS
Inputs:
1. Multibody model (mass, rotational inertia)
2. Tire parameters (Cs, Cα, etc.)
3. The current kinematic state (S, α ,γ, etc.)
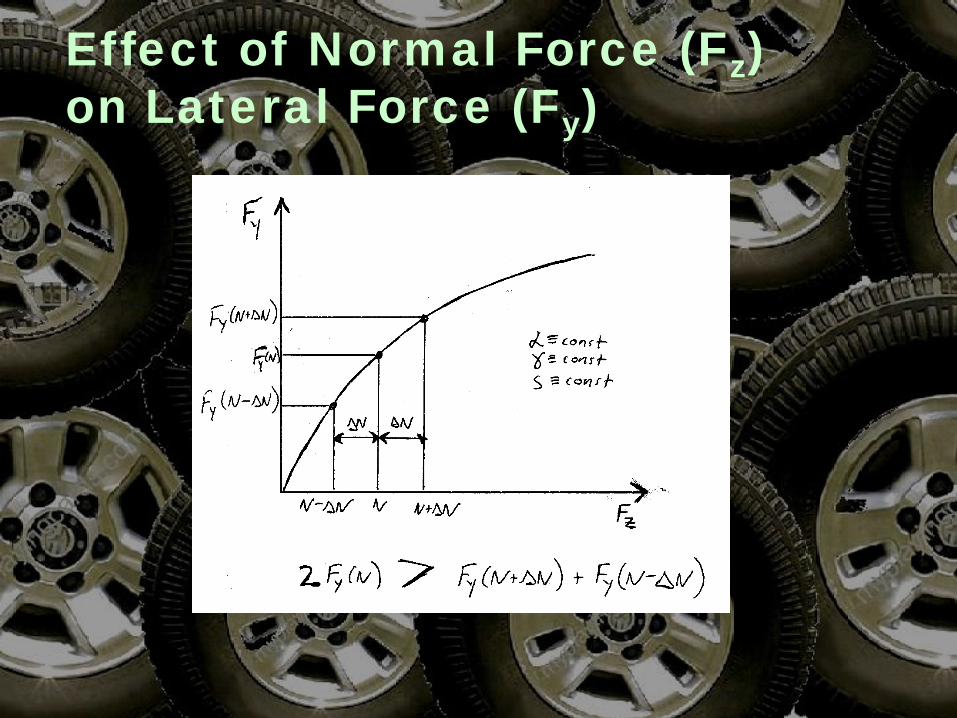
Effect of Normal Force (Fz) on Lateral Force (Fy)











![Tire Modeling for Multibody Dynamics Applications...transient tire model [3] is used to implement a tire model that can handle tranisent driving situations into the multibody dynamics](https://static.fdocuments.in/doc/165x107/60b2a54e08b23169c13b8e16/tire-modeling-for-multibody-dynamics-applications-transient-tire-model-3-is.jpg)






