An Efficient Monte-Carlo Algorithm for The Type II Maximum Likelihood Approach to Parameter
20
An Efficient Monte-Carlo Algorithm for The Type II Maximum Likelihood Approach to Parameter Estimation of Non-linear Diffusions Yuan Shen 1 , D. Cornford 1 , C. Archambeau 2 , and M. Opper 3 1. Neural Computing Research Group, Aston University; 2. Department of Computer Science, University College London; 3. Artificial Intelligence Group, Technical University Berlin. 1
Transcript of An Efficient Monte-Carlo Algorithm for The Type II Maximum Likelihood Approach to Parameter

An Efficient Monte-Carlo Algorithm
for
The Type II Maximum Likelihood Approach
to
Parameter Estimation of Non-linear Diffusions
Yuan Shen1, D. Cornford1, C. Archambeau2, and M. Opper3
1. Neural Computing Research Group, Aston University;
2. Department of Computer Science, University College London;
3. Artificial Intelligence Group, Technical University Berlin.
1

Outline
• The Mathematical Setting of Bayesian inference in nonlinear
diffusions
1. Full Bayesian Treatment
2. Type II Maximum Likelihood
• Monte Carlo Maximum Likelihood Methods
1. Bennett’s Acceptance Ratio Method
2. Wang-Landau’s Random-Walk Algorithm
• Numerical Experiments
1. The Log Marginal Likelihood Profiles
2. The Asymptotic Behaviour of Parameter Estimation
• Future Work
2
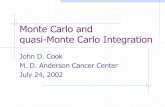
Basic settings: (continuous-time) non-linear diffusions
dX(t) = f(X, t; θ)dt + D1/2dW(t) with X(t = 0) = X0
• X(t) ∈ Rd: the state vector;
• f : Rd ×R −→ Rd: the drift term with hyper-parameter θ;
• W(t) ∈ Rd: a multivariate Wiener process;
• D ∈ Rd×d: the diffusion matrix.
Basic settings: (discrete-time) partial observations
yk = h(X(tk)) + R1/2 · ξk
• yk ∈ Rd′
: the observation at tk, k = 1, ..., M ;
• h : Rd −→ Rd′
: the measurement function
• ξk ∈ Rd′
: multivariate white noise;
• R ∈ Rd′×d′
: the covariance matrix of measurement errors.
3

Toy Example: Stochastic Double-Well Systems
dx = 4x(1 − x2)dt + κdw
0 50 100 150 200 250 300 350 400 450 500−1.5
−1
−0.5
0
0.5
1
1.5κ = 0.5
t
x
0 50 100 150 200 250 300 350 400 450 500−2
−1
0
1
2
t
x
κ = 1.0
4

A Full Bayesian Treatment
p(X(t),D|{y1, ...,yM}) ∝ p(D) · p(X0) · exp(−Hdyn)︸ ︷︷ ︸
p(X|D)︸ ︷︷ ︸
p(X,D)
· exp(−Hobs)︸ ︷︷ ︸
p(Y|X)
0 = t1 < t2, ... < tM−1 < tM = T
Hdyn =1
2
∫ T
0
∣∣∣∣
∣∣∣∣
dX
dt− f(X, t)
∣∣∣∣
∣∣∣∣
2
D︸ ︷︷ ︸
Onsager-Machlup
Hobs =1
2
M∑
k=1
||yk − h(X(tk))||2R
||a||2A = a>A−1a
−→ Markov Chain Monte Carlo (MCMC)
5

MCMC estimation of state X (Hybrid Monte Carlo)
0 5 10 15 20 25 30 35 40 45 50−2.0
−1.5
−1.0
−0.5
0.0
0.5
1.0
1.5
2.0
Time t
Stat
e x
Joint estimation of X and D (Gibbs sampling) −→ slow
convergence due to high dependence between X- and D samples
6

Type II Maximum Likelihood Method
The posterior of X
p(X|Y,D) =p(Y|X) · p(X|D)
∫
dX · p(Y|X) · p(X|D)
︸ ︷︷ ︸
p(Y|D)
−→ Marginal likelihood p(Y|D)
Type II Maximum Likelihood Estimate of D and X
D̂ = maxD p(Y|D)
p(X|D̂,Y) ∝ p(Y|X) · p(X|D̂)
−→ Monte Carlo Maximum Likelihood
−→ Problems: Difficulties in calculating the ratio of
normalising constants p(Y|D1) : p(Y|D2) : p(Y|D3) : ....
7

Bennett’s Acceptance Ratio Method
• Two posterior densities p1 = p(X|D1,Y) and p2 = p(X|D2,Y)
with their normalising constants Z1 and Z2, respectively −→
compute Z1
Z2
by Metropolis-Hastings;
• Running a Metropolis-Hastings algorithm with a transition
kernel T (·|·) that allows moves between π1 = p(X|D1,Y) · ω1
and π2 = p(X|D2,Y) · ω2 where ω1 and ω2 are so-called
pseudo-prior for index I in an extended state space [X, I] (see
simulated tempering literature);
• The ratio of normalising constants Z1
Z2
= ω1
ω2
−→ The uniform
distribution of occupation numbers P(I=1)P(I=2) = 1
[Z1
Z2
]
·ω2
ω1=
Z1/ω1
Z2/ω2=
Ep1[T (π2|π1)]
Ep2[T (π1|π2)]
=α(π1 → π2)
α(π2 → π1)=
P(I = 1)
P(I = 2)
8
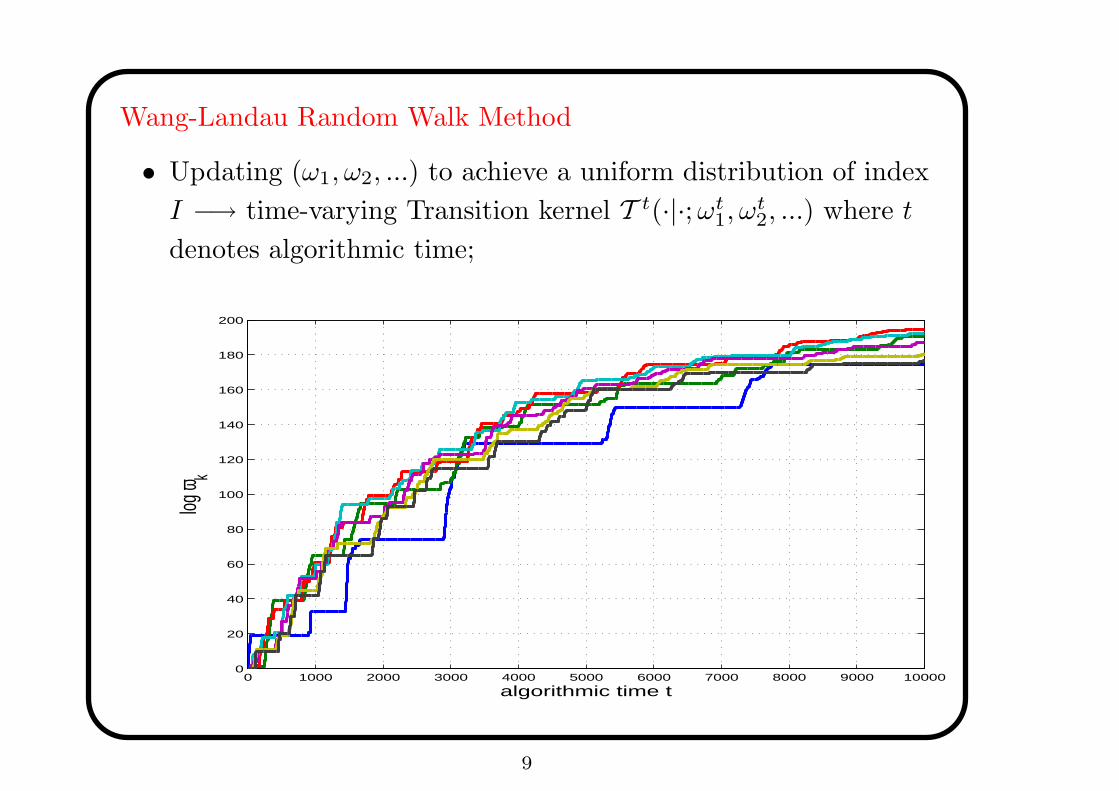
Wang-Landau Random Walk Method
• Updating (ω1, ω2, ...) to achieve a uniform distribution of index
I −→ time-varying Transition kernel T t(·|·; ωt1, ω
t2, ...) where t
denotes algorithmic time;
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
20
40
60
80
100
120
140
160
180
200
algorithmic time t
log ω k
9

• Define a schedule ωtk,
ωtk = ωt−1
k · (1 + γt−1 · δkIt−1)
where γt is an external, deterministic scalar process of positive
and non-increasing values −→ a controlled Markov chain;
0 2 4 6 8 10 12
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
algorithmic time t
γt
10

• An example of the process γ:
γt = (1 + γ0)1
2j − 1 ∀t ∈ [τj−1, τj ].
where {τj} are random times (except for τ0 = 0);
• The choice of random times {τj}
1. t = τj : Htk = 0 and t > τj : Ht+1
k = Htk + δkIt ;
2. If Ht is sufficiently flat, then set τj+1 = t.
0 2 4 6 8 10 12 14 16 18 200
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
index I
histogr
am H
11

Numerical Experiments
• Toy example
dx = 4x(1 − x2)dt + κdw with κ = 1.0
• Comparison of log marginal likelihood profiles
– Investigation of asymptotic behaviour 1: observation
window size T −→ ∞ (fixed M)
– Investigation of asymptotic behaviour 2: observation
density M per time unit −→ ∞ (fixed T )
12
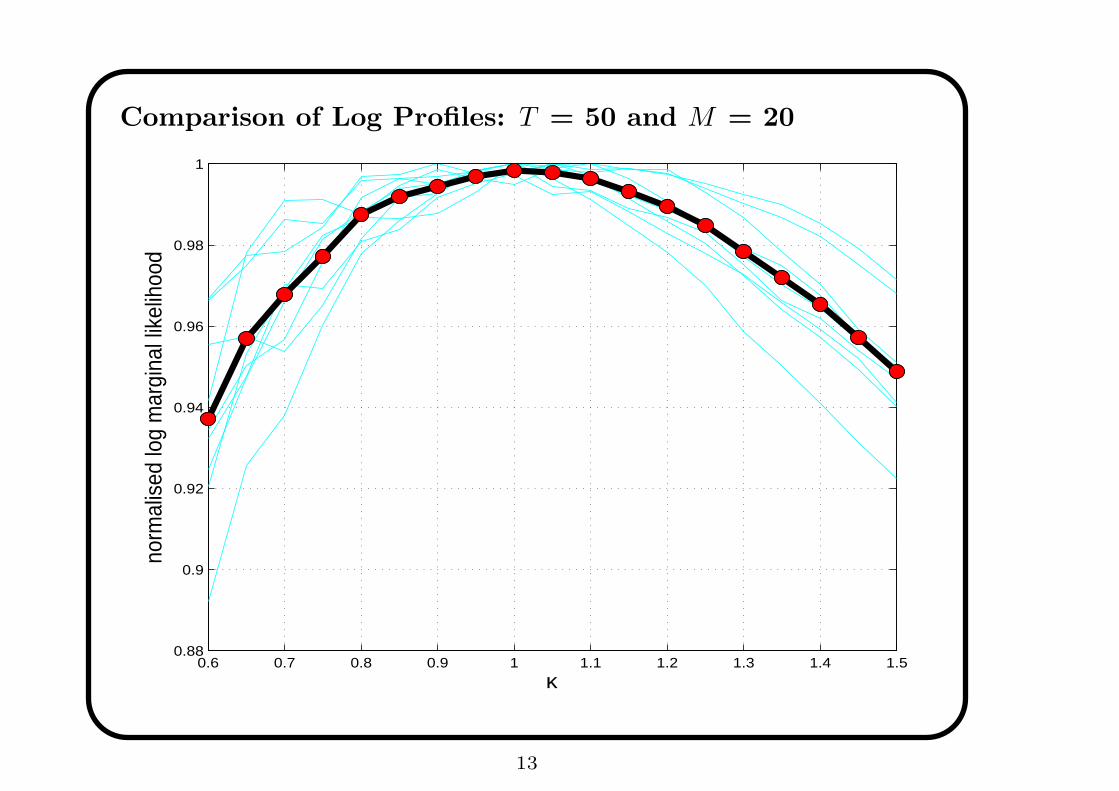
Comparison of Log Profiles: T = 50 and M = 20
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.50.88
0.9
0.92
0.94
0.96
0.98
1
κ
norm
alis
ed lo
g m
argi
nal l
ikel
ihoo
d
13

Comparison of Log Profiles: T = 50 and M = 1
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.50.92
0.93
0.94
0.95
0.96
0.97
0.98
0.99
1
κ
norm
alis
ed lo
g m
argi
nal l
ikel
ihoo
d
14

0 10 20 30 40 50−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
0 10 20 30 40 50−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
0.5 0.6 0.7 0.8 0.9 10
100
200
300
400
500
600
700
800
900
1000
κ
exit tim
e
1 1.1 1.2 1.3 1.4 1.50
1
2
3
4
5
6
7
8
9
10
κ
exit tim
e
15
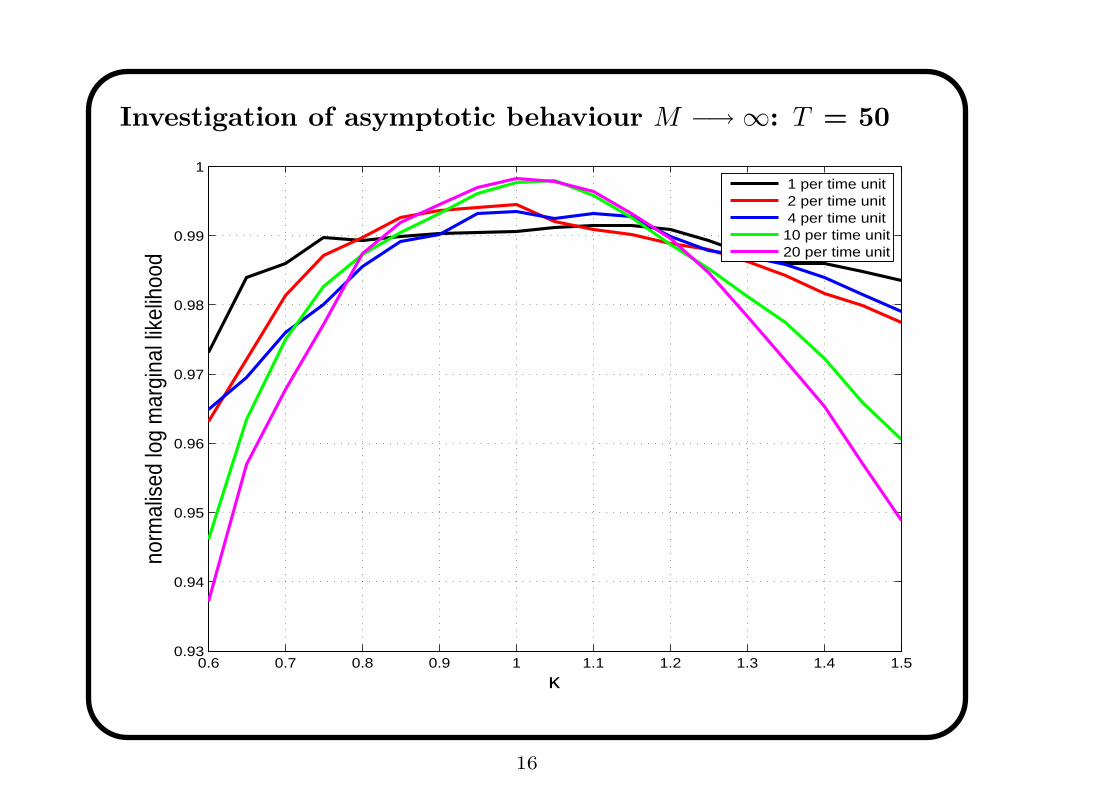
Investigation of asymptotic behaviour M −→ ∞: T = 50
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.50.93
0.94
0.95
0.96
0.97
0.98
0.99
1
κ
norm
alis
ed lo
g m
argi
nal l
ikel
ihoo
d
1 per time unit 2 per time unit 4 per time unit10 per time unit20 per time unit
16

Investigation of asymptotic behaviour T −→ ∞: M = 4
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.50.96
0.965
0.97
0.975
0.98
0.985
0.99
0.995
1
1.005
κ
norm
alis
ed lo
g m
argi
nal l
ikel
ihoo
d
t = 5t = 10t = 20t = 30t = 40t = 50
17

Investigation of asymptotic behaviour T −→ ∞: M = 20
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.50.93
0.94
0.95
0.96
0.97
0.98
0.99
1
κ
norm
alis
ed lo
g m
argi
nal l
ikel
ihoo
d
t = 5t = 10t = 20t = 30t = 40t = 50
18

Variational Approximation Method
• Q(X|D): a Gaussian approximation to the posterior measure
P(X|Y,D);
• Variational Free Energy
F(D) = − lnP(Y|D) + KL(Q̂(X|D)||P(X|Y,D))
where
Q̂(X|D) = minQ KL(Q(X|D)||P(X|Y,D))
• The variational estimate of D
D̂ = minD F(D)
• Profile Comparison:
F(D) ≥ − lnP(Y|D)
19

Future work
• Comparison of log profiles and point estimates (Type 2
Maximum Likelihood)
• Comparison of posterior distribution (Full Bayesian Treatment)
• Wang-Landau Monte-Carlo Maximum-Likelihood
for the joint estimation of drift- and diffusion parameter;
• Variational MCMC for parameter estimation.
20