An Adaptive Checkpoint Model For Large-Scale HPC Systems
2
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 An Adaptive Checkpoint Model For Large-Scale HPC Systems Subhendu Behera [email protected] North Carolina State University Raleigh, North Carolina Lipeng Wan [email protected] Oak Ridge National Laboratory Oak Ridge, Tennessee Frank Mueller [email protected] North Carolina State University Raleigh, North Carolina Matthew Wolf [email protected] Oak Ridge National Laboratory Oak Ridge, Tennessee Scott Klasky [email protected] Oak Ridge National Laboratory Oak Ridge, Tennessee ABSTRACT Checkpoint/Restart is a widely used Fault Tolerance technique for application resilience. However, failures and the overhead of saving application state for future recovery upon failure reduces the application efficiency significantly. This work contributes a failure analysis and prediction model making decisions for checkpoint data placement, recovery, and techniques for reducing checkpoint frequency. We also demonstrate a reduction in application overhead by taking proactive measures guided by failure prediction. KEYWORDS High Performance Computing, Failure Prediction, I/O subsystem, Checkpoint/Restart, Burst Buffers ACM Reference Format: Subhendu Behera, Lipeng Wan, Frank Mueller, Matthew Wolf, and Scott Klasky. 2019. An Adaptive Checkpoint Model For Large-Scale HPC Systems. In Proceedings of ACM Conference (Conference’17). ACM, New York, NY, USA, 2 pages. https://doi.org/10.1145/nnnnnnn.nnnnnnn 1 INTRODUCTION Given the scale of modern-day High-Performance Computing sys- tems, failures are imminent and frequent. Recent investigations [2, 3] develop failure prediction models to improve High-Performance Computing(HPC) resiliency. We aim to utilize the DESH failure prediction model [2] to predict failures in advance with a predicted lead time. With sufficient lead time, a proactive measure can be taken to avoid failure and computation waste. The idea is to raise a failure alarm whenever a recognized pattern of logs is found on a node. With sufficient lead time, appropriate action can be taken to migrate the application from a node under risk of failure to a new and healthy node. Apart from proactive live migration, log-based failure analysis can also help in making decisions about checkpoint data placement. As already known, an application’s efficiency on the HPC system Unpublished working draft. Not for distribution. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, or republish, to post on servers or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from [email protected]. Conference’17, July 2017, Washington, DC, USA © 2019 Association for Computing Machinery. ACM ISBN 978-x-xxxx-xxxx-x/YY/MM. . . $15.00 https://doi.org/10.1145/nnnnnnn.nnnnnnn is severely impacted by I/O performance which often presents a bottleneck. To alleviate this problem, Burst Buffers (BBs, fast NVMe storage devices) are now used in HPC I/O subsystems. BBs are used as an intermediate fast storage medium for checkpoint data for faster Checkpoint/Restart. BBs also differ in architecture. For example, Summit’s compute nodes have local NVMe storage of 1.6TB attached to them, whereas Cori’s compute nodes share BBs that are clustered on special nodes. In the case of clustered BB nodes, the checkpoint data can be retrieved even if a compute node fails. However, the same is not true for local BBs as they become inaccessible upon node failure. Hence the stored data on local BBs is asynchronously transferred to the Parallel File System (PFS). So classifying failures as node failures and soft failures can help to make an appropriate decision regarding the placement of checkpoint data and its recovery. If a failure is a catastrophic node failure then the checkpoint data should be written to PFS. Otherwise, it can be written to local BBs. We propose a checkpoint model that takes advantage of modern BBs-based I/O subsystems and a failure prediction/analysis model. We also use the adaptive checkpoint model derived from [4] to determine an optimal checkpoint interval that considers proactive fault mitigation rates and makes efficient use of both BBs and the PFS. 2 DESIGN Our model is derived from the checkpoint model [4] which decides the optimal checkpoint interval while considering the daily write limit of BBs for optimal use of both BBs and the PFS. We use this model as our default model when there is no failure prediction. Our new checkpoint model takes decisions based on the following scenarios. • Is a failure Predicted ? During the periods when a failure is not predicted we use the adaptive checkpoint model [4]. This ensures that the application state is saved efficiently with the use of BBs and the PFS. Checkpoint data is saved on to the BBs or the PFS based on the limit of BB writes (see [4]). If BBs are local, then checkpoints bleed off to the PFS asynchronously and slowly while computation continues. • Does the predicted failure have enough lead time ? In case a failure is predicted, we need to have enough lead time to perform proactive live migration or safeguard check- point. 2019-10-16 19:05. Page 1 of 1–2.
Transcript of An Adaptive Checkpoint Model For Large-Scale HPC Systems

1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
An Adaptive Checkpoint Model For Large-Scale HPC SystemsSubhendu [email protected]
North Carolina State UniversityRaleigh, North Carolina
Lipeng [email protected]
Oak Ridge National LaboratoryOak Ridge, Tennessee
Frank [email protected]
North Carolina State UniversityRaleigh, North Carolina
Matthew [email protected]
Oak Ridge National LaboratoryOak Ridge, Tennessee
Scott [email protected]
Oak Ridge National LaboratoryOak Ridge, Tennessee
ABSTRACTCheckpoint/Restart is a widely used Fault Tolerance techniquefor application resilience. However, failures and the overhead ofsaving application state for future recovery upon failure reduces theapplication efficiency significantly. This work contributes a failureanalysis and prediction model making decisions for checkpointdata placement, recovery, and techniques for reducing checkpointfrequency. We also demonstrate a reduction in application overheadby taking proactive measures guided by failure prediction.
KEYWORDSHigh Performance Computing, Failure Prediction, I/O subsystem,Checkpoint/Restart, Burst BuffersACM Reference Format:Subhendu Behera, Lipeng Wan, Frank Mueller, Matthew Wolf, and ScottKlasky. 2019. An Adaptive Checkpoint Model For Large-Scale HPC Systems.In Proceedings of ACM Conference (Conference’17). ACM, New York, NY,USA, 2 pages. https://doi.org/10.1145/nnnnnnn.nnnnnnn
1 INTRODUCTIONGiven the scale of modern-day High-Performance Computing sys-tems, failures are imminent and frequent. Recent investigations [2,3] develop failure prediction models to improve High-PerformanceComputing(HPC) resiliency. We aim to utilize the DESH failureprediction model [2] to predict failures in advance with a predictedlead time. With sufficient lead time, a proactive measure can betaken to avoid failure and computation waste. The idea is to raise afailure alarm whenever a recognized pattern of logs is found on anode. With sufficient lead time, appropriate action can be taken tomigrate the application from a node under risk of failure to a newand healthy node.
Apart from proactive live migration, log-based failure analysiscan also help in making decisions about checkpoint data placement.As already known, an application’s efficiency on the HPC system
Unpublished working draft. Not for distribution.Permission to make digital or hard copies of all or part of this work for personal orclassroom use is granted without fee provided that copies are not made or distributedfor profit or commercial advantage and that copies bear this notice and the full citationon the first page. Copyrights for components of this work owned by others than ACMmust be honored. Abstracting with credit is permitted. To copy otherwise, or republish,to post on servers or to redistribute to lists, requires prior specific permission and/or afee. Request permissions from [email protected]’17, July 2017, Washington, DC, USA© 2019 Association for Computing Machinery.ACM ISBN 978-x-xxxx-xxxx-x/YY/MM. . . $15.00https://doi.org/10.1145/nnnnnnn.nnnnnnn
is severely impacted by I/O performance which often presents abottleneck. To alleviate this problem, Burst Buffers (BBs, fast NVMestorage devices) are now used in HPC I/O subsystems. BBs areused as an intermediate fast storage medium for checkpoint datafor faster Checkpoint/Restart. BBs also differ in architecture. Forexample, Summit’s compute nodes have local NVMe storage of1.6TB attached to them, whereas Cori’s compute nodes share BBsthat are clustered on special nodes. In the case of clustered BBnodes, the checkpoint data can be retrieved even if a computenode fails. However, the same is not true for local BBs as theybecome inaccessible upon node failure. Hence the stored data onlocal BBs is asynchronously transferred to the Parallel File System(PFS). So classifying failures as node failures and soft failures canhelp to make an appropriate decision regarding the placementof checkpoint data and its recovery. If a failure is a catastrophicnode failure then the checkpoint data should be written to PFS.Otherwise, it can be written to local BBs.
We propose a checkpoint model that takes advantage of modernBBs-based I/O subsystems and a failure prediction/analysis model.We also use the adaptive checkpoint model derived from [4] todetermine an optimal checkpoint interval that considers proactivefault mitigation rates and makes efficient use of both BBs and thePFS.
2 DESIGNOur model is derived from the checkpoint model [4] which decidesthe optimal checkpoint interval while considering the daily writelimit of BBs for optimal use of both BBs and the PFS. We use thismodel as our default model when there is no failure prediction.Our new checkpoint model takes decisions based on the followingscenarios.
• Is a failure Predicted ? During the periods when afailure is not predicted we use the adaptive checkpoint model[4]. This ensures that the application state is saved efficientlywith the use of BBs and the PFS. Checkpoint data is savedon to the BBs or the PFS based on the limit of BB writes (see[4]). If BBs are local, then checkpoints bleed off to the PFSasynchronously and slowly while computation continues.
• Does the predicted failure have enough lead time ?In case a failure is predicted, we need to have enough leadtime to perform proactive live migration or safeguard check-point.
2019-10-16 19:05. Page 1 of 1–2.

117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
Conference’17, July 2017, Washington, DC, USA Subhendu Behera, Lipeng Wan, Frank Mueller, Matthew Wolf, and Scott Klasky
175176177178179180181182183184185186187188189190191192193194195196197198199200201202203204205206207208209210211212213214215216217218219220221222223224225226227228229230231232233234235236237238239240241242243244245246247248249250251252253254
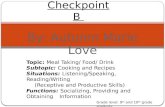
Figure 1: Decision Tree of the Checkpoint Model
• Is the Burst Buffer is local or clustered ? If theHPC system has a clustered Burst Buffer then the checkpointdata can be stored and retrieved from it. In the case of a localBurst Buffer, checkpoint data storage location and recoverystrategy depend on the failure type.
• Is the failure a Node Failure ? With sufficient leadtime for safeguard checkpoint, we need to make sure thatcheckpoint data is stored in BBs first, then bled off to the PFS.Post-failure, the checkpoint data can be recovered from localBB devices on healthy nodes while the new, replacementnode can recover the data from the PFS. However, in the caseof soft failures, the checkpoint data can be stored in BBs andrecovered later from the same.
The above checkpoint model is demonstrated in figure 1 as adecision tree with leaf nodes representing actions taken based onconditions, represented as intermediate nodes, that hold.
3 EVALUATIONWe evaluate our model based on the percentage of checkpoint fre-quency and computation wastage reductions on a Summit-like HPCsystem. First, we analyzed logs from three modern HPC systems(Cray XC30 and Cray XC40) over six months to find instances ofdifferent common sequences of phrases or logs that may lead tofailure, categorized them as soft or node failures, and measuredtheir mean lead time. We used the failure sequences from [1, 2] toextract the possible failure instances and consider them as failuresin our simulation. We also found that failures with more than therequired time to live migrate on Summit is close to 44% of all thefailure instances. We make a few assumptions. First, DRAM size isthe maximum amount of data transfer required to migrate an appli-cation. Second, even though the analyzed logs are from only four
HPC Systems, we expect failures with similar lead time distributionon other HPC systems.
Our simulation for real-world scientific applications such asCHIMERA, XGC, S3D, and VULCAN runs on a Summit-like super-computer along with our Checkpoint/Restart solution. During thesimulation, we measure the percentage of computation hours saveddue to the failure prediction and analysis model. It is observed thatthe gains made by avoiding wastage of computation and reducingthe checkpoint effort are between 22% to 97%. With 44% of thefailures that can be avoided using proactive live migration, thecheckpoint interval in [4] can be increased by 33% as per [5]. Thisreduces the checkpoint writes to BBs by ≈ 29% and increases thedurability of BBs.
4 FUTUREWORKIn the future, we aim to integrate I/O performance prediction mod-els into the checkpoint model to improve application efficiency forfailures that cannot be predicted with sufficient lead time.
5 CONCLUSIONIn this work, we build a checkpoint model that takes into accountthe modern design of the I/O subsystem of large-scale HPC systemswhile being driven by a failure prediction model. This ensures thatcheckpoint data placement is efficient and the data is available forrecovery upon failure. Failure prediction with sufficient lead timeto live migrate can result in the checkpoint writes reduction by≈ 29%. We also demonstrate a 22% - 97% decrease in computationwastage because of failure prediction and analysis.
ACKNOWLEDGMENTSThis research was supported in part by NSF grants 1525609, 1813004,and an appointment to the Oak Ridge National Laboratory ASTROProgram, sponsored by the U.S. Department of Energy and admin-istered by the Oak Ridge Institute for Science and Education.
This research used resources of the Oak Ridge Leadership Com-puting Facility at the Oak Ridge National Laboratory, which issupported by the Office of Science of the U.S. Department of Energyunder Contract No. DE-AC05-00OR22725.
REFERENCES[1] Anwesha Das, Frank Mueller, Paul Hargrove, Eric Roman, and Scott Baden. 2018.
Doomsday: Predicting Which Node Will Fail when on Supercomputers. In Proceed-ings of the International Conference for High Performance Computing, Networking,Storage, and Analysis (SC ’18). IEEE Press, Piscataway, NJ, USA, Article 9, 14 pages.https://doi.org/10.1109/SC.2018.00012
[2] Anwesha Das, Frank Mueller, Charles Siegel, and Abhinav Vishnu. 2018. Desh:Deep Learning for System Health Prediction of Lead Times to Failure in HPC.In Proceedings of the 27th International Symposium on High-Performance Paralleland Distributed Computing (HPDC ’18). ACM, New York, NY, USA, 40–51. https://doi.org/10.1145/3208040.3208051
[3] Ana Gainaru, Franck Cappello, Marc Snir, and William T Kramer. 2013. Failureprediction for HPC systems and applications: Current situation and open issues.International Journal of High Performance Computing Applications 27, 3 (1 8 2013),273–282. https://doi.org/10.1177/1094342013488258
[4] Lipeng Wan, Qing Cao, Feiyi Wang, and Sarp Oral. 2017. Optimizing CheckpointData Placement with Guaranteed Burst Buffer Endurance in Large-scale Hier-archical Storage Systems. J. Parallel Distrib. Comput. 100, C (Feb. 2017), 16–29.https://doi.org/10.1016/j.jpdc.2016.10.002
[5] John W. Young. 1974. A First Order Approximation to the Optimum CheckpointInterval. Commun. ACM 17, 9 (Sept. 1974), 530–531. https://doi.org/10.1145/361147.361115
2019-10-16 19:05. Page 2 of 1–2.