[American Society of Civil Engineers 11th Biennial ASCE Aerospace Division International Conference...
12
1 On the comprehensive modeling of response of shape memory (SMA) materials Dr. A. F. Saleeb Department of Civil Engineering, The University of Akron, Akron, OH 44325-3905, USA [email protected] Abhimanyu Kumar Computational Methods Group, The University of Akron, Akron, OH 44325-3905, USA [email protected] Abstract Despite, significant work over many years (utilizing either one of the micromechanics based or phenomenological approaches; see Lagoudas et al. 2006; Patoor et al. 2006), there are still prospects of much improvements to be made in constitutive modeling of Shape Memory Alloys (SMA), specially if we target sufficiently general scope in the modeling; i.e., including such important attributes as, (i) multiaxiality, (ii) possible asymmetry in tension and compression, (iii) accounting for pseudoelasticity and pseudoplasticity, (iv) rate dependence, and (v) effects of shape memory training under cyclic loading. The theoretical formulation employs two main ingredients; (i) multiplicity of hardening mechanisms, and (ii) the partition of the energy storage/dissipation that is so vital in capturing the extremes of pseudoelasticity and pseudoplasticity in SMAs. In this presentation, we describe our recent efforts in extending the approach utilized in (Saleeb et al. 2001) to the modeling of the inelastic response of SMA materials. 2.1 Introduction 1.1 Motivation The good performances of SMA in commercially-viable applications are presently well established in as many diverse fields as structural, aerospace, and biomedical engineering. Furthermore, the emerging new classes of high-temperature SMA (HTSMA) material systems offer great potential in many innovative technologies; e.g. flow control issues such as adaptive inlets, actively-controlled airfoils, shape-changing varies and blades, variable area exhaust nozzles, adaptive chevrons, etc. There is an obvious need for development of complete and efficient material model to utilize these alloys in engineering design. The constitutive models should capture complex properties of the behavior of SMAs under phase transformation induced deformation, and thermo-mechanical loadings. They should also lead to numerically robust and efficient schemes to be implemented in large scale finite element softwares. The work reported here is primarily motivated by the need to develop sufficiently general three dimensional material model accounting for the important effects of stress Earth & Space 2008 © 2008 ASCE Earth & Space 2008 Downloaded from ascelibrary.org by UNIVERSITE LAVAL on 07/12/14. Copyright ASCE. For personal use only; all rights reserved.
Transcript of [American Society of Civil Engineers 11th Biennial ASCE Aerospace Division International Conference...

1
On the comprehensive modeling of response of shape memory (SMA) materials
Dr. A. F. Saleeb Department of Civil Engineering, The University of Akron, Akron, OH 44325-3905, USA [email protected] Abhimanyu Kumar Computational Methods Group, The University of Akron, Akron, OH 44325-3905, USA [email protected]
Abstract Despite, significant work over many years (utilizing either one of the micromechanics based or phenomenological approaches; see Lagoudas et al. 2006; Patoor et al. 2006), there are still prospects of much improvements to be made in constitutive modeling of Shape Memory Alloys (SMA), specially if we target sufficiently general scope in the modeling; i.e., including such important attributes as, (i) multiaxiality, (ii) possible asymmetry in tension and compression, (iii) accounting for pseudoelasticity and pseudoplasticity, (iv) rate dependence, and (v) effects of shape memory training under cyclic loading. The theoretical formulation employs two main ingredients; (i) multiplicity of hardening mechanisms, and (ii) the partition of the energy storage/dissipation that is so vital in capturing the extremes of pseudoelasticity and pseudoplasticity in SMAs. In this presentation, we describe our recent efforts in extending the approach utilized in (Saleeb et al. 2001) to the modeling of the inelastic response of SMA materials. 2.1 Introduction 1.1 Motivation The good performances of SMA in commercially-viable applications are presently well established in as many diverse fields as structural, aerospace, and biomedical engineering. Furthermore, the emerging new classes of high-temperature SMA (HTSMA) material systems offer great potential in many innovative technologies; e.g. flow control issues such as adaptive inlets, actively-controlled airfoils, shape-changing varies and blades, variable area exhaust nozzles, adaptive chevrons, etc. There is an obvious need for development of complete and efficient material model to utilize these alloys in engineering design. The constitutive models should capture complex properties of the behavior of SMAs under phase transformation induced deformation, and thermo-mechanical loadings. They should also lead to numerically robust and efficient schemes to be implemented in large scale finite element softwares. The work reported here is primarily motivated by the need to develop sufficiently general three dimensional material model accounting for the important effects of stress
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

2
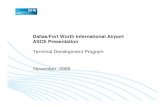
induced phase transformations (pseudoelastic pseudoplastic, etc.) in Shape Memory Alloys (SMA). To this end, we extend our previously developed work (Saleeb et al., 2001).The features targeted in our modeling are inspired by a number of recent experiments reported in literature (e.g. in Auricchio et al., 2007) for uniaxial and cyclic training tests, and in Helm and Haupt (2003) for multiaxial stress states (tension-torsion experiments). 1.2 Scope and formulation The scope is limited to stress and strain controlled tests under isothermal conditions. Also, we limited ourselves to the range of small deformations. In our mathematical formulation and the associated numerical implementation schemes, we followed the details given in (Saleeb et al., 2001). A summary of some key points is given below. We adopted complete potential-based frame work (Saleeb and Wilt, 1993; Arnold and Slaeeb, 1994) utilizing internal state variables, as a point of departures for further extensions. Thus, a coupled viscoelasticplastic model would be formulated, allowing for sufficient generality in its potential functions (Gibb’s and dissipation) through a systematic introduction of several mechanisms (internal state variables of the tensorial type) for viscoplastic response components. The viscoplasticity formulation accounts for both nonlinear kinematic hardening and state recovery mechanism. Refer to figure 1 for a schematic representation. The evolution (rate) equations for the inelastic strains, εI, were developed based on the use of transformation “yield” functions having curved meridians and a distorted (non circular) shape in the deviatoric plane (along the lines described in chapters 5 and 7 of Chen and Saleeb, 1994, vol. 1). This provides limiting conditions for phase transformations (i.e., from austenite to martensites as well as possible reorientations of martensite variants). This will also enable the modeling of asymmetry in tension/shear/compression as often observed experimentally for SMA materials.
Figure 1: General multimechanism hereditary behavior model
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

3
The specific SMA block in figure 1 includes three internal state tensors (b = 1, 2, 3 in figure 1). The first accounts for the rapid developments of transformation strains, with the second accounting for the possible gradual hardening in the “flag” region of pseudoelastic SMA (see figure 2a). The third and final internal mechanism in the SMA block of figure 1 provides a novel extension to the forms used in (Saleeb et al., 2001). In that, it is used as a limiting internal force demarking the completion of all phase transformations in SMA. It enables us to bypass any complications in the “traditional” treatment of the condition of “a unit value for the sum of all volume-fractions-of-the-phases” (see ends of “flag” regions in figures 4a, b below). Finally, we reserved the additional hardening-recovery mechanism (b = 4 to 6 in figure 1) to account for cyclic load effects, and together with the viscoplastic nature of εI, these will induce rate-dependent responses of SMA (although we are mostly focusing on the nearly “inviscid” SMA behavior here because of the lack of systematic rate-effect studies in most of the reported experiments). Secondly, for the numerical integration scheme, we utilize the implicit backward Euler method (Saleeb and Wilt, 1993; Saleeb et al., 1998b, 2000) for its unconditional stability and its robustness. A concise form is developed by exploiting the mathematical strucutures of the model equations, leading to a very efficient implementation of the update and its algorithmic (consistent), (material) tangent stiffness. In particular, the closed-form, expressions for the tangent stiffness arrays are derived whose dimensions are independent of the number of state variables employed (i.e. the stress tensor, tensorial viscoelastic internal parameters, and tensorial viscoplastic state variable); i.e. the dimension is only determined by the underlying problem dimensions (i.e. six for three dimensional problems, three for plane stress problems, etc.). These expressions and tangent stiffness have proved effective in implementing the Newton iterative scheme utilized in the integration. 2. Numerical Simulations In this section, numerical simulations of uniaxial (both strain- and stress- controlled) as well as biaxial stress–strain processes (under strain-control) are discussed. More specifically, we study qualitative aspects of the responses of our SMA model in the following cases: (1) strain controlled uniaxial cyclic loading, (2) asymmetry in pseudoelastic and pseudoplastic response in tension and compression (strain controlled simulation), (3) existence of attractors for in internal loops under sustained cyclic loadings (stress controlled), and (4) responses in proportional and nonproportional multiaxial deformation path tests. The simulations are performed using our UMAT with ABAQUS. The material parameters listed in Table 1 are used for test cases (1) and (2). The parameters listed in Table 2, with slight variation from Table 1, are used for demonstrations in test cases (3) and (4). The selection of parameters is based upon typical experimental observed behavior of NiTi alloys, reported in litratures. The test cases (1) and (2) are performed at 8% normal strain, whereas strain magnitudes of order 4% were used for
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

4
the various branches/segments of the loading paths involved in test case (4). In all subsequent plots, stresses are reported in MPa.
0.00 0.02 0.04 0.06 0.08 0.100
100
200
300
400
500
1st Cycle
5th Cycle
10th Cycle
15th Cycle
30th Cycle
σ
ε (a) (b)
Figure 2: (a) Typical results under strain controlled uniaxial cyclic test for NiTi (Auricchio et al. 2007), (b) simulated response for strain controlled cyclic loading
Table 1: Characteristic matrial parameters used in test cases (1) and (2) for NiTi alloy
Parameters Units Value Elastic stiffness modulus, Es MPa 35000
Poisson’s ratio, ν - 0.3 Viscoplastic Mechanisms
Number of viscoplastic mechanisms - 6 κf MPa 35 n - 4 μ MPa·s 107
1 2 6, , ,α α ακ MPa 170,1000, 104, 300, 380, 420
1,2, ,6m 2, 1, 1, 1.1, 1.1, 1.1 11,2, ,6β - 14, 10, 10, 10, 8, 8
1,2, ,6r 0, 0, 0, 0.002, 0.0004, 0.00008 11,2, ,6H MPa 1.5×105, 100, 1, 400, 200, 150
Distortion Constants (for yielding surface/stress transformation) 1flowc 1.15
1flowd 2
1,2, ,6hardc 0.6, 0.6, 0.6, 0.6, 0.6, 0.6
1,2, ,6flowd 1.2, 1.2, 1.2, 1.2, 1.2, 1.2
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

5
Strain controlled uniaxial cyclic loading The response of material of interest is obtained for 30 cycles of uniaxial strain controlled test, with the material parameters listed in Table 1. Also, parameters pertinent to small confinement pressure effect, we used a1 = 5.694 MPa, a2 = 0.6 (for “small” inelastic compressibility in figures 1 and 2, but all other remaining figures in the paper correspond to a1 = a2 = 0). The model is able to demonstrate permanent inelasticity that saturates on a stable value after a certain number of cycles as well as the degradation effects pseudo elastic loops as depicted in figure 2. Note the similarity between experimentally observed behaviors reported in literature (Auricchio et al., 2007) and the simulated response.
Parameters Units Value Elastic stiffness modulus, Es MPa 35000
Poisson’s ratio, ν - 0.3 Viscoplastic Mechanisms
Number of viscoplastic mechanisms - 6 κf MPa 55 n - 10 μ MPa·s 107
1,2, ,6κ MPa 170, 17, 0.6, 300, 380, 420
1,2, ,6m 2, 1, 1, 1.1, 1.1, 1.1 11,2, ,6β - 14, 10, 10, 10, 8, 8
1,2, ,6r 0, 0, 0, 0.002, 0.0004, 0.00008 11,2, ,6H MPa 1.5×106, 10000, 10, 400, 200, 150
Table 2: Characteristic material parameters used in test cases (3) and (4) for NiTi alloys
2.1 Asymmetry in tension and compression for pseudoelastic and pseudoplastic
response A very important response seen experimentally for SMAs is the tension–compression asymmetry. To demonstrate this aspect, even in the case of inelastic incompressibility, we utilized the same material model, but without confinement pressure effect (i.e. a1 = a2 = 0). Two cases are considered here; pseudoelastic (
1170ακ = ) and pseudoplastic (
120ακ = ). The different degrees in the effect of
asymmetry in the response of the model under strain controlled loading are shown in figure 3 for both cases; i.e. pseudoelastic and pseudoplastic. 2.2 Closed loop attractors for sustained cyclic loadings For the current case, strain controlled simulations were performed with the material parameters listed in Table 2. Figure 4 shows the response of material model under complex cyclic loading. Figure 4(a) shows the behavior of material when it is
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

6
partially loaded and partially unloaded repeatedly. Figure 4(b) shows the behavior when the specimen is first loaded to the completion of phase transformation (to stress just before it starts rehardening), and then unloaded and reloaded repeatedly. In either case (i.e. from “left” in figure 4a or from “right” in figure 4b), the closed loop attractor for sustained cyclic loading reaches to same value (figure 4c). The evolutions of the magnitude of the transformation strains for the backbone curve, for strain loading of 0 – 11%, are shown in figure 4d.
-0.10 -0.08 -0.06 -0.04 -0.02 0.00 0.02 0.04 0.06 0.08 0.10-800
-600
-400
-200
0
200
400
600
CompressionTension
σ
ε-0.10 -0.08 -0.06 -0.04 -0.02 0.00 0.02 0.04 0.06 0.08 0.10
-400
-300
-200
-100
0
100
200
300
CompressionTension
σ
ε (a) (b)
Figure 3: Asymmetry in (a) pseudoelastic response in tension and compression, and (b) in pseudoplastic response in tension and compression
2.3 Multiaxial deformation path test The response of the material model to multiaxial deformation paths are of particular importance. In the first simulation, a radial deformation path (the normal and shear strains are proportional to each other) was considered where, each loading path belongs to one loading cycle. The results obtained are plotted in figure 5. The next simulation was performed with non proportional loading path such that the resulting deformation path was square (figure 6). A butterfly shaped deformation path was also considered (figure 7). Qualitatively, note that each of the calculated stress paths due to a given strain path corresponds closely to the experimental observations reported in literature (see fig. 3 in Helm and Haupt, 2003) in the sense that all characteristic features are present. Also, for the cases of square strain path and butterfly strain path, the evolutions of the magnitude of the transformation strains are shown in figure 6e and 7e respectively.
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

7
0.00 0.02 0.04 0.06 0.08 0.10 0.120
100
200
300
400
500
600
ε
σ
0.00 0.02 0.04 0.06 0.08 0.10 0.12
0
100
200
300
400
500
600
σ
ε (a) (b)
Internal Loops vs Col 2
0.00 0.02 0.04 0.06 0.08 0.100
100
200
300
400
500
σ
ε
(c)
Time0 50 100 150 200
Mag
nitu
de o
f Tra
nsfo
rmat
ion
Indu
ced
Stra
ins
0.00
0.02
0.04
0.06
0.08
0.10
0.12
(d)
Figure 4: Loop attractors for more complex cyclic loading. Note the similarity between our model prediction and fig. 12 in Brocca et al. (2002)
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

8
-0.01 0.00 0.01 0.02 0.03 0.04 0.05-0.01
0.00
0.01
0.02
0.03
0.04
0.05
γ3
ε-100 0 100 200 300 400
-50
0
50
100
150
200
250
300
350
σ
3τ
(a) (b)
-0.01 0.00 0.01 0.02 0.03 0.04 0.05
0
100
200
300
400
σ
ε
-0.01 0.00 0.01 0.02 0.03 0.04 0.05-50
0
50
100
150
200
250
300
350
3τ
γ3
(c) (d) Figure 5: Radial deformation path test
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

9
0.00 0.01 0.02 0.03 0.04 0.05
0.00
0.01
0.02
0.03
0.04
0.05
γ3
ε -200 -100 0 100 200 300 400 500
0
100
200
300
3τ
σ (a) (b)
0.00 0.01 0.02 0.03 0.04 0.05-200
-100
0
100
200
300
400
500
ε
σ
0.00 0.01 0.02 0.03 0.04 0.05
0
100
200
300
γ3
3τ
(c) (d)
Time0 100 200 300 400
Mag
nitu
de o
f Tra
nsfo
rmat
ion
Indu
ced
Stra
in
0.00
0.02
0.04
0.06
0.08
(e)
Figure 6: Square deformation path test
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

10
-0.01 0.00 0.01 0.02 0.03 0.04 0.05
0.00
0.01
0.02
0.03
0.04
0.05
γ3
ε -100 0 100 200 300 400 500
-50
0
50
100
150
200
250
300
350
σ
3τ
(a) (b)
-0.01 0.00 0.01 0.02 0.03 0.04 0.05-100
0
100
200
300
400
500
σ
ε
0.00 0.01 0.02 0.03 0.04 0.05-50
0
50
100
150
200
250
300
350
γ3
3τ
(c) (d)
Time0 100 200 300 400
Mag
nitu
de o
f Tra
nsfo
rmat
ion
Indu
ced
Stra
in
0.00
0.02
0.04
0.06
0.08
(e)
Figure 7: Butterfly deformation path test
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

11
Conclusion We have presented a number of results describing our on-going efforts for developing general, three dimensional, SMA material models. The key in this formulation lies in the use of the notion of multiplicity of tensorial hardening/dissipative mechanisms to account for the characteristic partitions of energy storage and dissipations; i.e., a rapidly forming “flag” region of forward and reverse phase transformations (product variants’ reorientations), and bounded by stiff regions (rehardening) at the completion of all transformations. This also provided for efficient (and straightforward) numerical implementations. The test simulations conducted here were inspired by several recent uniaxial and multiaxial experiments. Overall, the developed model has demonstrated many important SMA characteristics; i.e. pseudoelasticity and pseudoplasticity, asymmetry in tension and compression, as well as the reorientation effects under nonproportional complex deformation modes. References: Auricchio, F., Reali, A., and Stefanelli, U. (2007). “A three-dimensional model
describing stress-induced solid phase transformation with permanent inelasticity.” International Journal of Plasticity, 23 (2), 207-226.
Patoor Etienne, Lagoudas, Dimitris C., Entchev, Pavlin B., Brinson, L. Catherine, and Gao, Xiujie (2006), “Shape memory alloys, Part I: General properties and modeling of single crystals.” Mechanics of Materials, 38(5-6), 391-429.
Lagoudas, Dimitris C., Entchev, Pavlin B., Popov, Peter, Patoor, Entienne, Brinson, L. Catherine (2006). “Shape memory alloys, Part II: Modeling of polycrystals.” Mechanics of Materials, 38(5-6), 430-462.
Helm, Dirk, and Haupt, Peter (2003), “Shape memory behaviour: modelling within continuum thermomechanics”, International Journal of Solids and Structures, 40(4), 2003, 827-849.
Brocca, M., Brinson, L. C., and Ba ant, Z. P. (2002), “Three-dimensional constitutive model for shape memory alloys based on microplane model”, Journal of the Mechanics and Physics of Solids, 50(5), 1051-1077.
Saleeb, A. F., Arnold, S. M., Castelli, M. G., Wilt, T. E., and Graf, W. (2001). “A general hereditary multimechanism-based deformation model with application to the viscoelastoplastic response of titanium alloys.” Int. J. of Plasticity, 17(10), 1305-1350.
Saleeb, A. F., Wilt, T. E. and Li, W. (2000), “Robust integration schemes for generalized viscoplasticity with internal-state variables”, Computers & Structures, 74(5), 2000, 601-628
Saleeb, A. F., Wilt, T. E., and Li, W. (1998b), “An implicit integration scheme for generalized viscoplasticity with dynamic recovery”, Computational Mechanics, 21(6), 429-440.
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.

12
Chen, Wai-Fah, Saleeb, Atef F. (1994), Constitutive equations for engineering materials, Elsevier, New York.
Arnold, S. M. and Saleeb, A. F. (1994), “On the thermodynamic framework of generalized coupled thermoelastic-viscoplastic-damage modeling”, International Journal of Plasticity, 10(3), 263-278
Saleeb, A. F., Wilt, T. E. (1993), "Analysis of the anisotropic viscoplastic-damage response of composite laminates-continuum basis and computational algorithms", International Journal for Numerical Methods in Engineering, 36(10), 1629-1660.
Earth & Space 2008 © 2008 ASCE
Earth & Space 2008
Dow
nloa
ded
from
asc
elib
rary
.org
by
UN
IVE
RSI
TE
LA
VA
L o
n 07
/12/
14. C
opyr
ight
ASC
E. F
or p
erso
nal u
se o
nly;
all
righ
ts r
eser
ved.