Algoritmo basado en la colonia artificial de abejas con...
125
Transcript of Algoritmo basado en la colonia artificial de abejas con...

Un algoritmo basado en la colonia
arti�cial de abejas con búsqueda local
para resolver problemas de optimización
con restricciones
TESIS DE MAESTRÍA
Adán Enrique Aguilar Justo
FACULTAD DE FÍSICA E INTELIGENCIA ARTIFICIALDEPARTAMENTO DE INTELIGENCIA ARTIFICIAL
"Maestría en Inteligencia Arti�cial"
Fecha: 07 de agosto de 2014

Documento maquetado con TEXiS v.1.0+.

Un algoritmo basado en la colonia
arti�cial de abejas con búsqueda
local para resolver problemas de
optimización con restricciones
Tesis para obtener el grado de Maestro en Inteligencia Arti�cial
Maestría en Inteligencia Arti�cial
Dirigida por el Doctor
Efrén Mezura Montes
FACULTAD DE FÍSICA E INTELIGENCIA ARTIFICIALDEPARTAMENTO DE INTELIGENCIA ARTIFICIAL
"Maestría en Inteligencia Arti�cial"
Fecha: 07 de agosto de 2014


Agradecimientos
Puedes censurar a un amigo en
con�anza, pero debes alabarlo delante de
los demás.
Leonardo Da Vinci
Agradezco a el CONACYT por el apoyo económico brindado durantela realización de este proyecto.
Agradezco a la Universidad Veracruzana, esta institución de enormecalidad, que me brindó todo el apoyo durante mi estancia.
Agradezco a mi asesor el Dr. Efrén Mezura Montes, todo su apoyo,conocimientos y compromiso con el proyecto que fueron parte funda-mental para que éste trabajo llegara a su termino en tiempo y forma.
Agradezco al Dr. Carlos Artemio Coello Coello, el haber compartidosu conocimiento y sus aportes al trabajo.
Agradezco a todos mis compañeros de la Maestría y del Doctoradoen Inteligencia Arti�cial quienes me aportaron comentarios y criticasvaliosas que me ayudaron a mejorar mi trabajo.
En especial agradezco a mis padres, que siguen siendo un soporte fun-damental en mi vida, quienes me han dado las mejores enseñanzas dela vida.
v


Resumen
El rendirse a la ignorancia y llamarla
dios siempre ha sido prematuro y sigue
siéndolo hoy día.
Issac Asimov
El algoritmo de colonia arti�cial de abejas (ABC por sus siglas en inglesArti�cial Bee Colony) originalmente fue planteado como un algoritmo pararesolver problemas de optimización sin restricciones, con el paso del tiem-po se le han incorporado mejoras y modi�caciones para resolver problemasrestringidos.
En la presente tesis se describe una propuesta de algoritmo meméticobasado ABC para problemas de optimización con restricciones. El algorit-mo propuesto es probado con dos métodos de búsqueda local, Hooke-Jeevesy Complex, estos son incorporados dentro del ciclo de evolutivo de ABC,particularmente después de la fase de abejas observadoras. Se ha utilizadouna métrica basada en la aptitud de la población actual para determinar elmomento de aplicar la búsqueda local.
El algoritmo propuesto fue probado en los conjuntos de funciones deprueba del congreso de Computación Evolutiva (CEC) de la IEEE en susversiones del CEC2006 y CEC2010. Los resultados fueron comparados conlos obtenidos por dos algoritmos del estado del arte. Los resultados muestranque la propuesta es competitiva resolviendo este tipo de problemas respectoa los del estado del arte.
vii


Índice
Agradecimientos v
Resumen vii
1. Introducción 1
1.1. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. De�nición del problema . . . . . . . . . . . . . . . . . . . . . 21.3. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.1. Objetivo general . . . . . . . . . . . . . . . . . . . . . 31.3.2. Objetivos especí�cos . . . . . . . . . . . . . . . . . . . 3
1.4. Contribución . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.5. Hipótesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.6. Justi�cación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.7. Organización del documento de tesis . . . . . . . . . . . . . . 4
2. Inteligencia colectiva y Cómputo memético 5
2.1. Inteligencia Colectiva (Swarm Intelligence) . . . . . . . . . . . 52.2. Cómputo memético . . . . . . . . . . . . . . . . . . . . . . . . 72.3. Algoritmos meméticos . . . . . . . . . . . . . . . . . . . . . . 82.4. Diseño de un algoritmo memético . . . . . . . . . . . . . . . . 8
2.4.1. Algoritmo Lamarckniano . . . . . . . . . . . . . . . . . 92.4.2. Algoritmo Baldwiniano . . . . . . . . . . . . . . . . . 9
3. Algoritmo de Colonia Arti�cial de Abejas 11
3.1. Modelo Biológico . . . . . . . . . . . . . . . . . . . . . . . . . 113.2. Algoritmo básico . . . . . . . . . . . . . . . . . . . . . . . . . 123.3. ABC para problemas con restricciones . . . . . . . . . . . . . 14
3.3.1. Propuesta de Karaboga y Akay (2011) . . . . . . . . . 14
4. Algoritmo Propuesto CMABC 17
4.1. Buscadores locales . . . . . . . . . . . . . . . . . . . . . . . . 174.1.1. Hooke-Jeeves . . . . . . . . . . . . . . . . . . . . . . . 18
ix

x Índice
4.1.2. Complex . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2. Abeja empleada basada en Evolución Diferencial . . . . . . . 214.3. ε-constrained . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.4. Convergencia basada en aptitud . . . . . . . . . . . . . . . . . 224.5. Algoritmo Completo . . . . . . . . . . . . . . . . . . . . . . . 23
5. Resultados y discusión 25
5.1. Diseño del experimento . . . . . . . . . . . . . . . . . . . . . . 255.1.1. Parámetros de los algoritmos . . . . . . . . . . . . . . 26
5.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.3. Discusión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.3.1. Resultados CEC2006 . . . . . . . . . . . . . . . . . . . 285.3.2. Resultados CEC2010 . . . . . . . . . . . . . . . . . . . 29
6. Conclusiones y trabajo futuro 45
6.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . 456.2. Trabajo futuro . . . . . . . . . . . . . . . . . . . . . . . . . . 46
I Apéndices 47
A. Apéndice 49
A.1. Pruebas de Wilcoxon . . . . . . . . . . . . . . . . . . . . . . . 49
B. Apéndice 53
B.1. Grá�cas de convergencia CEC2006 . . . . . . . . . . . . . . . 53B.2. Grá�cas de convergencia CEC2010 dimensión 10 . . . . . . . 66B.3. Grá�cas de convergencia CEC2010 dimensión 30 . . . . . . . 76
C. Apéndice 85
C.1. Detalle de las funciones del CEC2006 . . . . . . . . . . . . . . 85C.2. Detalle de las funciones del CEC2010 . . . . . . . . . . . . . . 97
Referencias 105

Índice de �guras
2.1. Ejemplos de comportamiento social en la naturaleza . . . . . 62.2. Forma de trabajar del algoritmo Lamarckniano, se realiza una
búsqueda local en el espacio del fenotipo a G1, se encuentrauna mejora con F1′ esta mejora reemplaza a G1 por G1′ . . 10
2.3. Algoritmo Baldwiniano, realiza la búsqueda local en el espa-cio de fenotipo, pero G1 solo toma la nueva aptitud sin serreemplazada por el genotipo correspondiente a F1′ . . . . . . 10
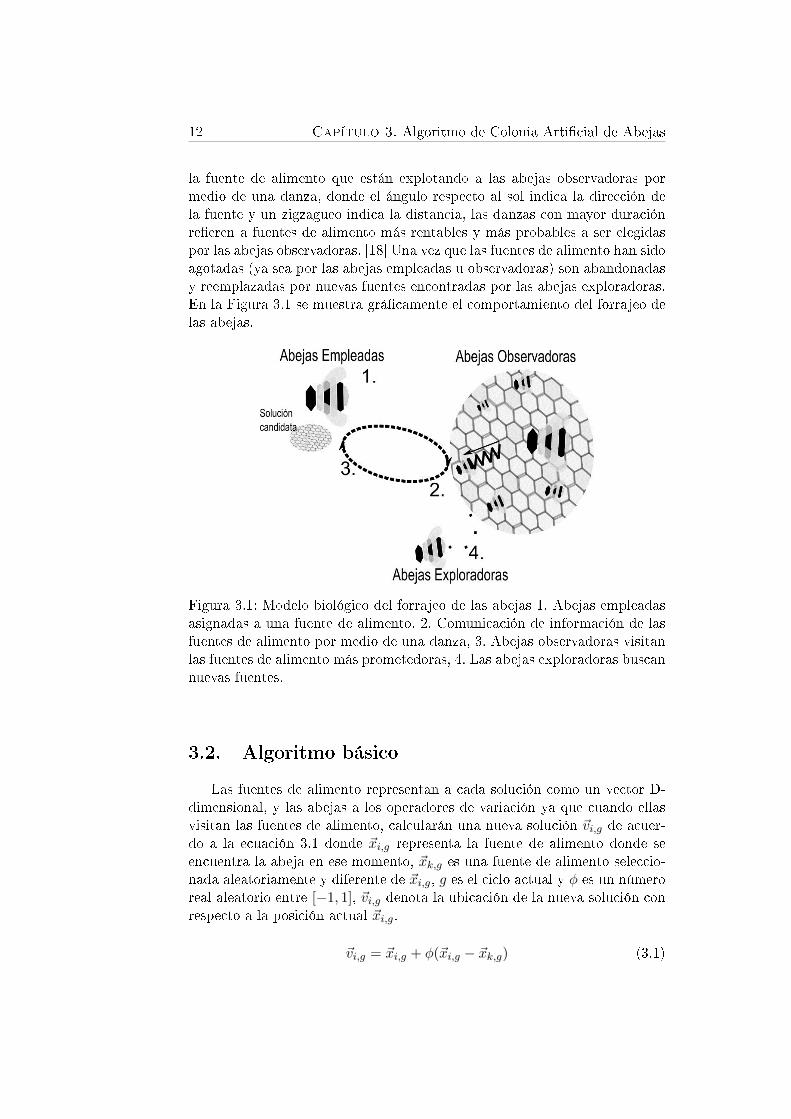
3.1. Modelo biológico del forrajeo de las abejas 1. Abejas emplea-das asignadas a una fuente de alimento, 2. Comunicación deinformación de las fuentes de alimento por medio de una dan-za, 3. Abejas observadoras visitan las fuentes de alimento másprometedoras, 4. Las abejas exploradoras buscan nuevas fuentes. 12
3.2. [19] Porcentaje de publicaciones basadas en enjambre de abe-jas: HBMO: Honey-bee mating optimization, BCO: Bee co-lony optimization, BA: BeeAdHoc, ABC: Arti�cial Bee Colony 14
5.1. Grá�ca de convergencia de la función G01 . . . . . . . . . . . 305.2. Grá�ca de convergencia de la función G04 . . . . . . . . . . . 305.3. Grá�ca de convergencia de la función G23 . . . . . . . . . . . 315.4. Grá�ca de convergencia de la función C01 dimensión 30 . . . 315.5. Grá�ca de convergencia de la función C14 dimensión 30 . . . 325.6. Grá�ca de convergencia de la función C15 dimensión 30 . . . 33
B.1. Grá�ca de convergencia de la función G01 . . . . . . . . . . . 53B.2. Grá�ca de convergencia de la función G02 . . . . . . . . . . . 54B.3. Grá�ca de convergencia de la función G03 . . . . . . . . . . . 55B.4. Grá�ca de convergencia de la función G04 . . . . . . . . . . . 55B.5. Grá�ca de convergencia de la función G05 . . . . . . . . . . . 56B.6. Grá�ca de convergencia de la función G06 . . . . . . . . . . . 56B.7. Grá�ca de convergencia de la función G07 . . . . . . . . . . . 57B.8. Grá�ca de convergencia de la función G08 . . . . . . . . . . . 57
xi

xii Índice de figuras
B.9. Grá�ca de convergencia de la función G09 . . . . . . . . . . . 58B.10.Grá�ca de convergencia de la función G11 . . . . . . . . . . . 58B.11.Grá�ca de convergencia de la función G02 . . . . . . . . . . . 59B.12.Grá�ca de convergencia de la función G12 . . . . . . . . . . . 59B.13.Grá�ca de convergencia de la función G13 . . . . . . . . . . . 60B.14.Grá�ca de convergencia de la función G14 . . . . . . . . . . . 60B.15.Grá�ca de convergencia de la función G15 . . . . . . . . . . . 61B.16.Grá�ca de convergencia de la función G16 . . . . . . . . . . . 61B.17.Grá�ca de convergencia de la función G17 . . . . . . . . . . . 62B.18.Grá�ca de convergencia de la función G18 . . . . . . . . . . . 63B.19.Grá�ca de convergencia de la función G19 . . . . . . . . . . . 64B.20.Grá�ca de convergencia de la función G23 . . . . . . . . . . . 64B.21.Grá�ca de convergencia de la función G24 . . . . . . . . . . . 65B.22.Grá�ca de convergencia de la función C01 . . . . . . . . . . . 66B.23.Grá�ca de convergencia de la función C02 . . . . . . . . . . . 67B.24.Grá�ca de convergencia de la función C03 . . . . . . . . . . . 67B.25.Grá�ca de convergencia de la función C04 . . . . . . . . . . . 68B.26.Grá�ca de convergencia de la función C05 . . . . . . . . . . . 68B.27.Grá�ca de convergencia de la función C06 . . . . . . . . . . . 69B.28.Grá�ca de convergencia de la función C07 . . . . . . . . . . . 69B.29.Grá�ca de convergencia de la función C08 . . . . . . . . . . . 70B.30.Grá�ca de convergencia de la función C09 . . . . . . . . . . . 70B.31.Grá�ca de convergencia de la función C10 . . . . . . . . . . . 71B.32.Grá�ca de convergencia de la función C11 . . . . . . . . . . . 71B.33.Grá�ca de convergencia de la función C12 . . . . . . . . . . . 72B.34.Grá�ca de convergencia de la función C13 . . . . . . . . . . . 72B.35.Grá�ca de convergencia de la función C14 . . . . . . . . . . . 73B.36.Grá�ca de convergencia de la función C15 . . . . . . . . . . . 73B.37.Grá�ca de convergencia de la función C16 . . . . . . . . . . . 74B.38.Grá�ca de convergencia de la función C17 . . . . . . . . . . . 74B.39.Grá�ca de convergencia de la función C18 . . . . . . . . . . . 75B.40.Grá�ca de convergencia de la función C01 . . . . . . . . . . . 76B.41.Grá�ca de convergencia de la función C02 . . . . . . . . . . . 77B.42.Grá�ca de convergencia de la función C03 . . . . . . . . . . . 77B.43.Grá�ca de convergencia de la función C07 . . . . . . . . . . . 78B.44.Grá�ca de convergencia de la función C08 . . . . . . . . . . . 78B.45.Grá�ca de convergencia de la función C09 . . . . . . . . . . . 79B.46.Grá�ca de convergencia de la función C10 . . . . . . . . . . . 79B.47.Grá�ca de convergencia de la función C12 . . . . . . . . . . . 80B.48.Grá�ca de convergencia de la función C13 . . . . . . . . . . . 80B.49.Grá�ca de convergencia de la función C14 . . . . . . . . . . . 81

Índice de figuras xiii
B.50.Grá�ca de convergencia de la función C15 . . . . . . . . . . . 81B.51.Grá�ca de convergencia de la función C16 . . . . . . . . . . . 82B.52.Grá�ca de convergencia de la función C17 . . . . . . . . . . . 82B.53.Grá�ca de convergencia de la función C18 . . . . . . . . . . . 83

Índice de Tablas
5.1. Parámetros para los algoritmos: SN es el número de fuentesde alimento, MR el Modi�cation Ratio, MCN el máximo deciclos, LIMITE máximo de ciclos que una fuente puede per-manecer sin mejora, ERROR I y ERROR F son la toleranciainicial y �nal para restricciones de igualdad. D es la dimensióndel problema. . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.2. Parámetros el algoritmo propuesto y los buscadores locales.Hooke-Jeeves: ε distancia mínima para terminar, α factor dereducción, ∆ vector de incrementos. Complex: ϕ diferenciamínima entre la aptitud de las soluciones, α factor de re�e-xión, δ distancia mínima entre las soluciones. MC-ABC: SNnúmero de fuentes de alimento, MR Modi�cation Ratio, Gciclo para considerar convergencia no factible. ε-constraint:TC ciclo donde ε es mínimo, CP factor de reducción de ε, Ppotencia para la suma de restricciones. . . . . . . . . . . . . . 27
5.3. Características de las funciones del conjunto de prueba delCEC2006. D número de variables del problema, ρ porcentajeaproximado de la zona factible, LI y NI restricciones de de-sigualdad lineales y no lineales, LE y NE son el número derestricciones de igualdad lineales y no lineales. a es el númerode restricciones activas . . . . . . . . . . . . . . . . . . . . . . 34
5.4. Límites y valor óptimo de las funciones del conjunto de pruebadel CEC2006 . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.5. Características de las funciones del conjunto de prueba delCEC2010. D es el número de variables del problema, E es elnúmero de restricciones de igualdad, I el número de restric-ciones de desigualdad. ρ = |F |/|S| es el porcentaje estimadoentre la región factible y el espacio de búsqueda . . . . . . . . 36
xv

xvi Índice de tablas
5.6. Estadísticas del conjunto de pruebas CEC2006: funciones G01a G08. En negrita se resaltan los mejores resultados. Para laprueba de Wilcoxon: + es que hay diferencia signi�cativa afavor de CM-ABC-HJ, - en contra y = que no existe diferenciasigni�cativa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
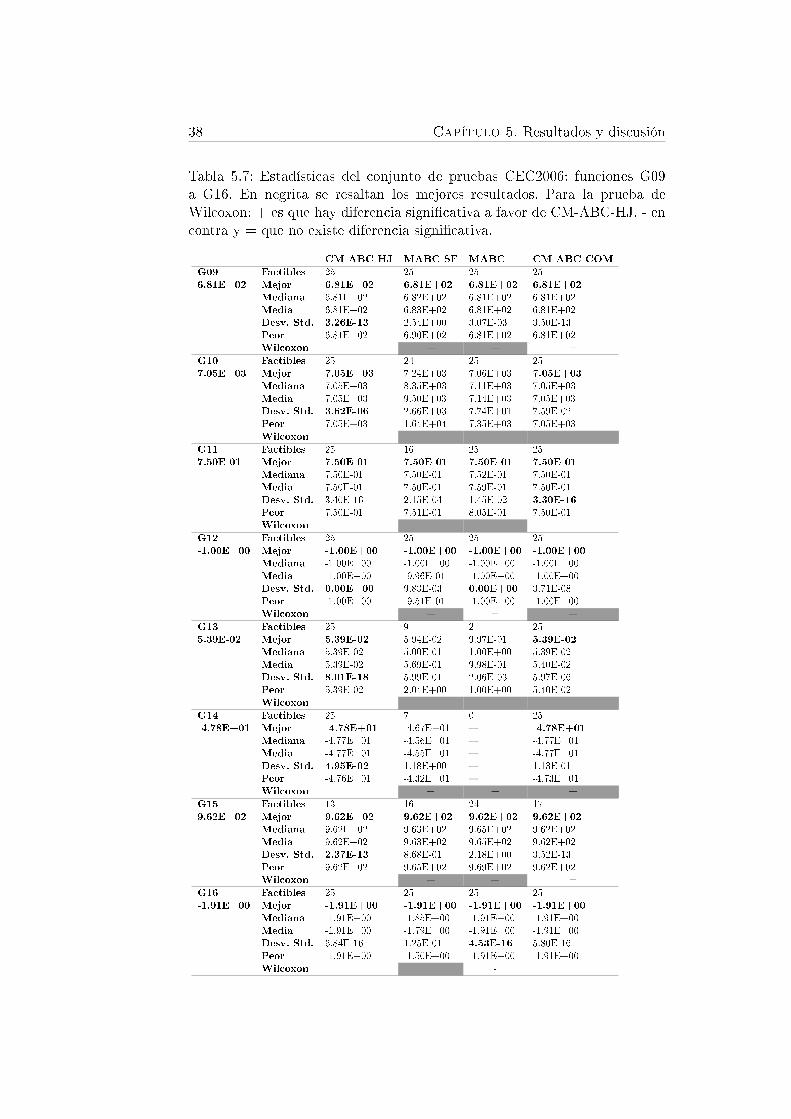
5.7. Estadísticas del conjunto de pruebas CEC2006: funciones G09a G16. En negrita se resaltan los mejores resultados. Para laprueba de Wilcoxon: + es que hay diferencia signi�cativa afavor de CM-ABC-HJ, - en contra y = que no existe diferenciasigni�cativa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.8. Estadísticas del conjunto de pruebas CEC2006: funciones G17a G24. En negrita se resaltan los mejores resultados. Para laprueba de Wilcoxon: + es que hay diferencia signi�cativa afavor de CM-ABC-HJ, - en contra y = que no existe diferenciasigni�cativa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.9. Estadísticas del conjunto de pruebas CEC2010 dimensión 10:funciones C01 a C09. En negrita se resaltan los mejores resul-tados. Para la prueba de Wilcoxon: + es que hay diferenciasigni�cativa a favor de CM-ABC-HJ, - en contra y = que noexiste diferencia signi�cativa. . . . . . . . . . . . . . . . . . . 40
5.10. Estadísticas del conjunto de pruebas CEC2010 dimensión 10:funciones C10 a C18. En negrita se resaltan los mejores resul-tados. Para la prueba de Wilcoxon: + es que hay diferenciasigni�cativa a favor de CM-ABC-HJ, - en contra y = que noexiste diferencia signi�cativa. . . . . . . . . . . . . . . . . . . 41
5.11. Estadísticas del conjunto de pruebas CEC2010 dimensión 30:funciones C01 a C09. En negrita se resaltan los mejores resul-tados. Para la prueba de Wilcoxon: + es que hay diferenciasigni�cativa a favor de CM-ABC-HJ, - en contra y = que noexiste diferencia signi�cativa. . . . . . . . . . . . . . . . . . . 42
5.12. Estadisticas del conjunto de pruebas CEC2010 dimensión 30:funciones C10 a C18. En negrita se resaltan los mejores resul-tados. Para la prueba de Wilcoxon: + es que hay diferenciasigni�cativa a favor de CM-ABC-HJ, - en contra y = que noexiste diferencia signi�cativa. . . . . . . . . . . . . . . . . . . 43
A.1. Prueba de Wilcoxon para el CEC2006. El número 1 indica quehay diferencia signi�cativa, el 0 que no la hay y �-� es que nohubo soluciones factibles. A0 es MABC-SF, A1 es MABC, A2es CMABC-HJ, A3 es CMABC-COM . . . . . . . . . . . . . 50

Índice de tablas xvii
A.2. Prueba de Wilcoxon para el CEC2010 dimensión 10. El núme-ro 1 indica que hay diferencia signi�cativa, el 0 que no la hayy �-� es que no hubo soluciones factibles. A0 es MABC-SF, A1es MABC, A2 es CMABC-HJ, A3 es CMABC-COM . . . . . 51
A.3. Prueba de Wilcoxon para el CEC2010 dimensión 30. El núme-ro 1 indica que hay diferencia signi�cativa, el 0 que no la hayy �-� es que no hubo soluciones factibles. A0 es MABC-SF, A1es MABC, A2 es CMABC-HJ-T, A3 es CMABC . . . . . . . 52
C.1. Data set for test problem g19 . . . . . . . . . . . . . . . . . . . 94C.2. Data set for test problem g20 . . . . . . . . . . . . . . . . . . . 95


Capítulo 1
Introducción
1.1. Antecedentes
Dentro de los algoritmos inspirados en el naturaleza para resolver pro-blemas de optimización, podemos encontrar aquéllos basados en inteligenciacolectiva (Swarm Intelligence) que son aquellos que se enfocan en el compor-tamiento colectivo, en el control descentralizado y en la auto-organización[20]. Dentro de estos algoritmos podemos encontrar a la colonia de hormigas,bancos de peces, parvadas de pájaros y la colonia arti�cial de abejas (ABCpor sus siglas en inglés, Arti�cial Bee Colony [18]), en el cual estará centradoeste documento.
ABC fue propuesto en 2005 por Karaboga [18] y está basado en el com-portamiento de forrajeo de las abejas melíferas. Este algoritmo fue pensadopara resolver problemas de optimización sin restricciones, sin embargo, tam-bién se ha adaptado para resolver problemas con restricciones y problemasde combinatoria.
Karaboga y Akay (2011)[17],[2], proponen una de las primeras versionesde ABC para resolver problemas de optimización numérica con restricciones,cambiando la forma de trabajar del operador básico del ABC añadiendo unaforma de cruza, mientras que para el manejo de restricciones proponen elusó las reglas de Deb [8].
Mezura-Montes et al. en [24], proponen un algoritmo basado en ABC,que promueve la exploración del espacio de búsqueda, además de utilizar elmétodo de tolerancia dinámica de restricciones usada en las estrategias evo-lutivas y aplicar un buscador local, que es utilizado cada vez que se alcanzaun porcentaje de evaluaciones predeterminado.
Bravejic et al. [6],[7], no consideran cada ejecución del algoritmo de ma-nera independiente, utilizando la mejor solución de la ejecución anterior enla población inicial de la siguiente, prueban su algoritmo en un conjunto defunciones de ingeniería.
Mezura-Montes et al. [23] presentan un algoritmo que explora la vecindad
1

2 Capítulo 1. Introducción
de la mejor solución, además de utilizar el método de ε-constraint para elmanejo de restricciones.
En cuanto a algoritmos que combinen diferentes técnicas de búsquedajunto con ABC podemos encontrar a Shi et al. [31] quienes proponen unalgoritmo híbrido basado en ABC y optimización de partículas (PSO), elcual prueban en funciones de optimización numérica sin restricciones. FeiKang et al. [16] combinan ABC y el método de Hooke-Jeeves como buscadorlocal para resolver problemas de optimización numérica irrestricta. Fister etal. [11] desarrollaron un algoritmo basado en ABC que combinan con dosbuscadores locales Nelder-Mead y caminata aleatoria con dirección de explo-tación. Este algoritmo fue aplicado al conjunto de funciones de optimizaciónglobal continua de gran escala del congreso de Computación Evolutiva de laIEEE CEC2012.
Se puede observar que la tendencia del uso de buscadores locales en ABCpara optimización numérica con restricciones es escasa. Además no existenestudios sobre el efecto de este tipo de algoritmos.
1.2. De�nición del problema
Uno de los problemas que ha atraído un alto interés en las últimas décadasha sido la optimización numérica, en este ámbito los algoritmos inspiradosen la naturaleza han jugado un papel importante obteniendo resultados fa-vorables. Dentro de estos problemas encontramos aquellos de optimizaciónnumérica con restricciones (Ecuación 1.1), el cual se de�ne sin pérdida degeneralidad, como encontrar un vector ~x que minimice una función objetivof(~x) sujeta a restricciones de igualdad (hj) y/o desigualdad (gj), donde li yui son los límites inferior y superior para cada una de las variables respectiva-mente,m es el número total de restricciones, y q es el número de restriccionesde desigualdad así m− q es el número de restricciones de igualdad. Este tipode problemas serán los resueltos en este trabajo.
minimizar f(~x), ~x = (x1, . . . , xn) ∈ Rn
li ≤ xi ≤ ui, i = 1, . . . , n
sujeto a : gj(~x) ≤ 0, para j = 1, . . . , q
hj(~x) = 0, para j = q + 1, . . . ,m
(1.1)

1.3. Objetivos 3
1.3. Objetivos
1.3.1. Objetivo general
Desarrollar un algoritmo basado en MABC (Modi�ed Arti�cial Bee Co-lony [17]) e incorporarle un buscador local que logre competir en resultadoscon los algoritmos del estado del arte.
1.3.2. Objetivos especí�cos
Implementar el algoritmo MABC(Modi�ed Arti�cial Bee)[17].
Comparar el desempeño de los métodos Hooke-Jevees y Complex comobuscadores locales.
Implementar el algoritmo MABC incorporando los buscadores locales.
Diseñar experimentos, probar y analizar resultados.
1.4. Contribución
Un estudio comparativo de dos buscadores locales sobre MABC.
Un algoritmo memético basado en MABC para resolver problemas deoptimización con restricciones.
1.5. Hipótesis
�La combinación del algoritmo MABC como buscador global y algoritmosde búsqueda local logran obtener resultados competitivos con algoritmos delestado del arte�.
1.6. Justi�cación
El problema de optimización numérica con restricciones ha sido atacadopor diferentes algoritmos basados en la naturaleza, entre estos ABC que esun algoritmo joven y que ha demostrado ser competitivo contra algoritmosdel estado del arte, sin embargo poco se ha explorado su hibridación conalgoritmos de búsqueda local.
Karaboga y Akay (2011)[17],[2], propusieron modi�caciones al algoritmooriginal de ABC para contender con las restricciones, básicamente integranmanejo de restricciones al algoritmo. Mezura-Montes et al. [23] propusieronmodi�caciones en la selección de fuentes de alimento para las abejas observa-doras, aplicaron la técnica conocida como ε-contrained para las restricciones

4 Capítulo 1. Introducción
y buscaron sesgar la generación de soluciones de las abejas exploradoras ha-cia la vecindad de la mejor solución encontrada. Mientras que Bravejic et al.[6],[7], utilizaron el algoritmo para resolver problemas de ingeniería y consi-deraron las ejecuciones del algoritmo dependientes, usando la mejor soluciónencontrada para la siguiente ejecución, además de buscar mayor diversidadal sustituir a las fuentes de alimento no factibles y las abandonadas factiblespor soluciones generadas aleatoriamente. Como podemos ver, la revisión dela literatura especializada sugiere que los esfuerzos se han centrado en elmanejo de restricciones y en los operadores de las abejas, mas no así en laincorporación de buscadores locales que coadyuven a la mejora de las solu-ciones que va generando el ABC.
1.7. Organización del documento de tesis
El resto del documento está organizado de la siguiente manera:
Capítulo 2. Inteligencia Colectiva y Cómputo Memético. En este ca-pítulo se presentan los antecedentes históricos de los algoritmos deinteligencia colectiva así como la de�nición del cómputo memético yalgoritmos meméticos que son conceptos claves en la hibridación debuscadores globales con buscadores locales.
Capítulo 3. Colonia Arti�cial de Abejas (ABC). Aquí se presenta demanera extensa el funcionamiento del algoritmo ABC y MABC queson la base de este trabajo de tesis.
Capítulo 4. Propuesta de algoritmo. En este capítulo se describe lapropuesta de algoritmo memético utilizando MABC y el buscador local,además del funcionamiento de los algoritmos locales utilizados.
Capítulo 5. Resultados y discusión. En este capítulo se muestran ydiscuten los resultados obtenidos por el algoritmo propuesto y se com-paran con algoritmos del estado del arte.
Capítulo 6. Conclusiones y trabajo futuro. En este capítulo se presentanlas conclusiones a partir de los resultados obtenidos y el trabajo futuroque se deriva de esta tesis.

Capítulo 2
Inteligencia colectiva yCómputo memético
En este capítulo se hablará de dos términos que están relacionados conel trabajo que se presenta, por un lado tenemos la �inteligencia colectiva� dela cual forma parte el algoritmo ABC y �Cómputo Memético� un términorelativamente nuevo, pero que explica muy bien el tipo de algoritmo que sepropone en este trabajo.
2.1. Inteligencia Colectiva (Swarm Intelligence)
En la naturaleza es muy común encontrar animales que mantienen gru-pos de individuos, en algunos casos éstos tienen un líder (conocido comoel macho/hembra alfa), y el comportamiento de los individuos es estricta-mente jerárquico. Aún más interesantes son aquéllos en los que no se logradeterminar un líder del grupo. Estas especies tienen un comportamiento deauto-organización, como lo podemos ver en las parvadas, o en los cardúmenes(bancos de peces) como podemos ver en la Fig. 2.1. Aquí los individuos des-conocen el estado del grupo general, sin embargo al transmitirse informaciónlogran agruparse [10].
La inteligencia colectiva también puede ser referida como �Swarm Inte-
lligence�. Formalmente �Swarm� se puede de�nir como un grupo de agentes(comúnmente móviles) que se comunican con otros de manera directa o indi-recta, para actuar sobre su entorno local [10]. La interacción entre los agentesda como resultado estrategias para resolver problemas de manera distribuida.
El estudio de numerosos comportamientos de animales y sociedades hadado como resultado el modelado de diferentes algoritmos de inteligenciacolectiva. Entre estos comportamientos biológicos que han inspirado a losmodelos computacionales encontramos, hormigas, termitas, abejas, arañas,cardúmenes, parvadas, entre otros.
5

6 Capítulo 2. Inteligencia colectiva y Cómputo memético
(a) Colonia de hormigas (b) Parvada (c) Cardumen
Figura 2.1: Ejemplos de comportamiento social en la naturaleza
El objetivo de los algoritmos de inteligencia colectiva es modelar los com-portamientos de los agentes y sus interacciones con el ambiente y sus veci-nos, con la �nalidad de obtener un comportamiento más complejo que puedausarse para resolver problemas [10].
Un algoritmo de inteligencia colectiva está conformado por agentes queinteraccionan con su medio ambiente y de acuerdo a esta interacción comu-nican a los demás información que les puede ser de utilidad, cada agentedecidirá su comportamiento con base en la información de sus compañerosy el conocimiento que tenga en ese momento. De acuerdo a esto podemosde�nir la estructura general de un algoritmo de inteligencia colectiva comose muestra en el Algoritmo 1
Algoritmo 1 Algoritmo general de la inteligencia colectiva1: Inicializar la población de agentes2: loop3: Generar una nueva población por medio de la interacción de cada
agente con su medio, de acuerdo al comportamiento individual4: Compartir la información con el resto de los agentes o con aquéllos que
sean seleccionados de acuerdo a un comportamiento de comunicación5: Generar una nueva población con la información que ha obtenido de
los otros agentes y de la información de su medio ambiente.6: end loop7: Retornar la información que contenga el mejor agente.

2.2. Cómputo memético 7
2.2. Cómputo memético
Para hablar de cómputo memético primero debemos de�nir la palabra�meme�, que fue acuñada por Dawkins en 1976 en su libro llamado �TheSel�sh Gene� y lo de�nió como �la unidad básica de transmisión cultural oimitación�. Dada esta de�nición, algunos ejemplos de meme son: melodías,frases, tendencias, etc.
Hoy en día la palabra �meme� es usada como análogo de la palabra �gen�que es más adecuada en la idea de la computación inteligente. Una de�niciónque podemos encontrar para el cómputo memético es la siguiente:
�La computación memética es un paradigma que usa la noción de memes
como unidades de información, codi�cada en representaciones computacio-
nales para resolver un problema�[29]De acuerdo a la de�nición anterior podemos decir que el cómputo memé-
tico busca combinar dos o más técnicas de solución de problemas, para asípoder obtener mejores resultados.
Un esquema básico de un algoritmo memético se muestra en el Algoritmo2, la inicialización de la población es la responsable de producir el conjuntoinicial de individuos, comúnmente en los algoritmos evolutivos tradiciona-les se inicializa con soluciones aleatorias, pero en los algoritmos meméticoses recomendable iniciar con buenas soluciones aplicando heurísticas a losindividuos generados. Para generar una nueva población se emplea la coope-ración y mejora de individuos, que son la parte central de estos algoritmos.Dentro de este proceso se puede emplear más de un operador de selección yrecombinación. La competencia es un medio de reemplazo para construir lapoblación del siguiente ciclo a partir de la población actual y la generada.
Algoritmo 2 Algoritmo Memético básico1: Inicializar la población2: loop3: Generar nueva población por medio de la cooperación4: Generar nueva población por medio de la mejora5: Combinar las poblaciones anteriores por medio de una competencia6: if la población converge then7: Reiniciar la población8: end if9: end loop
10: Regresar el mejor individuo
Algunas de las áreas de investigación donde se han aplicado algoritmosmeméticos se enumeran a continuación [26]:
1. Problemas NP de optimización combinatoria

8 Capítulo 2. Inteligencia colectiva y Cómputo memético
2. Aprendizaje automático y robótica
3. Ingeniería y Electrónica
4. Optimización de problemas moleculares
2.3. Algoritmos meméticos
Uno de los problemas que competen a la computación es resolver pro-blemas de optimización. Dentro de esta área de estudio se han derivadomúltiples estrategias, las cuales se denominan meta-heurísticas, entre ellasdestacan los algoritmos evolutivos que se encuentran muy relacionados conlos algoritmos meméticos.
Los algoritmos meméticos son una rama de estudio que pertenece a lacomputación memética, y se de�ne a continuación:
�Un algoritmo memético es una meta-heurística basada en población com-
puesta por un marco evolutivo y un conjunto de algoritmos de búsqueda local
que son utilizados dentro del ciclo de evolución� [27]Aunque esta de�nición puede llevarnos a la conclusión de que únicamente
la combinación de un algoritmo evolutivo y un buscador local es un algoritmomemético, esto no es cierto, puesto que este tipo de combinaciones conformansólo un subconjunto de los algoritmo meméticos. Dada esta ambigüedad, escomplicado encontrar en la literatura algoritmos meméticos como tales, y esmás común encontrarlos como algoritmos híbridos, algoritmos Lamarcknia-nos o algoritmos Baldwinianos.
2.4. Diseño de un algoritmo memético
Incluir un buscador local a un algoritmo bio-inspirado no necesariamenteimplica que éste mejorará su rendimiento, el diseño de estos algoritmo puedeguiarse respondiendo las siguientes preguntas [21]:
¾Qué método de búsqueda local debe ser usado?
¾Cómo es el paisaje de aptitud que se debe explorar?
¾Dónde y cuándo debe aplicarse el buscador local dentro del ciclo deevolución?
¾Qué modelo de mejora debe ser elegido Baldwiniano o Lamarckniano?
¾Cómo se puede mejorar la integración de los operadores del algoritmoevolutivo con el buscador local?
¾Qué individuos de la población deben ser mejorados por la búsquedalocal y cómo se seleccionarán?

2.4. Diseño de un algoritmo memético 9
Para dar respuesta a estas preguntas se requiere que conozcamos algunosdetalles del problema que estamos atacando, como su dimensión, el tipo deproblema (optimización combinatoria o numérica), la forma del paisaje deaptitud, etc.
Saber en qué momento dentro del ciclo evolutivo es conveniente aplicar elbuscador local, dependerá del funcionamiento del algoritmo evolutivo elegidoy del efecto que se espera del buscador local en la búsqueda global. Inclusose puede pensar en modi�car los operadores del algoritmo evolutivo para queéstos incluyan la búsqueda local como parte de su proceso.
A continuación se describen los algoritmos Lamarckniano y Baldwiniano.
2.4.1. Algoritmo Lamarckniano
En la actualidad la teoría de evolución de Lamarck se encuentra rechaza-da. Esta teoría expone que las características (fenotípicas) que un individuoadquiere durante su tiempo de vida, son transmitidas a su codi�cación ge-nética (genotipo) y heredadas a los individuos de la siguiente generación. Enel campo de la computación estas transformaciones de fenotipo a genotipo yviceversa son muy simples de realizar y crean una poderosa herramienta enel campo de la optimización. La evolución de Lamarck fue combinada conalgoritmos genéticos por Hart y Belew en 1996 [12], comúnmente la funciónde Lamarck toma la forma de un buscador local y trabaja sobre el espaciode búsqueda fenotípico intentando mejorar la aptitud del individuo como sepuede ver en la �gura 2.2. Un algoritmo básico de Lamarck se muestra en elAlgoritmo 3
Algoritmo 3 Algoritmo Lamarck1: Inicializar la población2: loop3: Selección4: Reproducción5: Mutación6: Reemplazo7: Evolución Lamarck (Buscador local)8: end loop
2.4.2. Algoritmo Baldwiniano
En 1896 en el artículo �A new Factor in evolution� de J. Mark Baldwin[4] propone su teoría de evolución, donde expone de manera general que losindividuos pueden mejorar durante su tiempo de vida. Sin embargo estascaracterísticas adquiridas no se transmiten a su genotipo. Un algoritmo queimplementa una estrategia Baldwin, utiliza un buscador local para mejorar

10 Capítulo 2. Inteligencia colectiva y Cómputo memético
Figura 2.2: Forma de trabajar del algoritmo Lamarckniano, se realiza unabúsqueda local en el espacio del fenotipo a G1, se encuentra una mejora conF1′ esta mejora reemplaza a G1 por G1′
su aptitud, los valores obtenidos en esos cambios no son transmitidos a sugenotipo, pero su aptitud adquirida si se mantiene. Hinton y Nowlan (1987)[13] señalan que este algoritmo incrementa la búsqueda dentro de los óp-timos locales, incrementando la posibilidad de encontrar el óptimo global.El esquema básico de un algoritmo Baldwin es similar al presentado en elalgoritmo 3, cambiando la línea 7 por el buscador local Baldwin.
De acuerdo a las pruebas realizadas en [34], la evolución Lamarcknianatiende a converger a óptimos locales mientras, la evolución Baldwin convergea óptimos globales sin embargo esta última es más lenta.
Figura 2.3: Algoritmo Baldwiniano, realiza la búsqueda local en el espaciode fenotipo, pero G1 solo toma la nueva aptitud sin ser reemplazada por elgenotipo correspondiente a F1′

Capítulo 3
Algoritmo de Colonia Arti�cialde Abejas
El algoritmo de colonia arti�cial de abejas (ABC) fue propuesto por Der-vis Karaboga en 2005 [18] está basado en el comportamiento de forrajeo delas abejas, y diseñado originalmente para problemas de optimización numé-rica sin restricciones, aunque puede ser utilizado para resolver problemas decombinatoria.
3.1. Modelo Biológico
El proceso de búsqueda de néctar por parte de las abejas es un proceso deoptimización, y el comportamiento de éstas se modeló como una heurísticade optimización basada en el modelo biológico que consta de los siguienteselementos:
1. Fuentes de alimento: aunque el valor de una fuente de alimento dependede muchos factores, es resumido en un valor numérico que indica supotencial.
2. Abejas recolectoras empleadas: estas abejas explotan una fuente dealimento, también son las encargadas de comunicar su ubicación y ren-tabilidad a las abejas observadoras.
3. Abejas recolectoras desempleadas: este tipo de abejas se encuentranbuscando fuentes de alimento para explotar. Se dividen en dos tiposlas exploradoras que se encargan de buscar nuevas fuentes de alimentoy las observadoras que esperan en la colmena para elegir alguna de lasfuentes de alimento que se encuentran en un proceso de explotaciónpor las abejas empleadas.
Estos tres elementos básicos del comportamiento de forrajeo interaccionande la siguiente forma: las abejas empleadas comunican la información de
11
12 Capítulo 3. Algoritmo de Colonia Arti�cial de Abejas
la fuente de alimento que están explotando a las abejas observadoras pormedio de una danza, donde el ángulo respecto al sol indica la dirección dela fuente y un zigzagueo indica la distancia, las danzas con mayor duraciónre�eren a fuentes de alimento más rentables y más probables a ser elegidaspor las abejas observadoras. [18] Una vez que las fuentes de alimento han sidoagotadas (ya sea por las abejas empleadas u observadoras) son abandonadasy reemplazadas por nuevas fuentes encontradas por las abejas exploradoras.En la Figura 3.1 se muestra grá�camente el comportamiento del forrajeo delas abejas.
Figura 3.1: Modelo biológico del forrajeo de las abejas 1. Abejas empleadasasignadas a una fuente de alimento, 2. Comunicación de información de lasfuentes de alimento por medio de una danza, 3. Abejas observadoras visitanlas fuentes de alimento más prometedoras, 4. Las abejas exploradoras buscannuevas fuentes.
3.2. Algoritmo básico
Las fuentes de alimento representan a cada solución como un vector D-dimensional, y las abejas a los operadores de variación ya que cuando ellasvisitan las fuentes de alimento, calcularán una nueva solución ~vi,g de acuer-do a la ecuación 3.1 donde ~xi,g representa la fuente de alimento donde seencuentra la abeja en ese momento, ~xk,g es una fuente de alimento seleccio-nada aleatoriamente y diferente de ~xi,g, g es el ciclo actual y φ es un númeroreal aleatorio entre [−1, 1], ~vi,g denota la ubicación de la nueva solución conrespecto a la posición actual ~xi,g.
~vi,g = ~xi,g + φ(~xi,g − ~xk,g) (3.1)

3.2. Algoritmo básico 13
Las abejas observadoras seleccionan las fuentes de alimento de acuerdo a unaprobabilidad pi asociada a la fuente de alimento, la cual es calculada de lasiguiente manera (ver Ecuación 3.2):
pi =fiti∑SNn=1 fitn
(3.2)
donde fiti es el valor de aptitud de la solución, y este valor es proporcionala la cantidad de néctar que tiene la solución i.
Los parámetros del algoritmo son los siguientes:
1. SN : es el número de fuentes de alimento
2. MCN : el número total de iteraciones que ejecutará ABC
3. Límite (limit): número de ciclos que será conservada una solución sinmejora antes de ser reemplazada por una nueva solución generada poruna abeja exploradora.
En el Algoritmo 4 se muestra el seudocódigo.
Algoritmo 4 ABC1: Inicializar la población de soluciones ~xi,0, i = 1, ..., SN Evaluar la pobla-
ción2: for g = 1 hasta MCN do3: Generar nuevas soluciones ~vi,g para las abejas empleadas usando la
Ecuación 3.1 y evaluarlas4: Conservar la mejor solución entre ~xi,g y ~vi,g5: Seleccionar las soluciones que serán visitadas por las abejas observa-
doras usando la Ecuación 3.26: Generar nuevas soluciones ~vi,g para las abejas observadoras usando la
Ecuación 3.1 y evaluarlas7: Conservar la mejor solución entre ~xi,g y ~vi,g8: Veri�car si existen fuentes abandonadas (si ya se alcanzó el Límite) y
reemplazarlas por soluciones generadas aleatoriamente por las abejasexploradoras.
9: Conservar la mejor solución encontrada hasta el momento10: end for11: Retornar la mejor solución
En la siguiente sección se muestran algunas modi�caciones del algoritmogeneral para la resolución de problemas con restricciones.

14 Capítulo 3. Algoritmo de Colonia Arti�cial de Abejas
3.3. ABC para problemas con restricciones
Desde que fue propuesto el algoritmo ABC en 2005, ha habido un cre-cimiento en el estudio su comportamiento en diferentes ámbitos, de acuerdoa la recopilación hecha por Karaboga en 2012 [19], el 54% (Figura 3.2) delas publicaciones referentes a algoritmos basados en enjambres de abejas sere�eren al algoritmo ABC entre éstos se encuentran aquellos que han sidoutilizados para resolver problemas con restricciones.
Figura 3.2: [19] Porcentaje de publicaciones basadas en enjambre de abejas:HBMO: Honey-bee mating optimization, BCO: Bee colony optimization, BA:BeeAdHoc, ABC: Arti�cial Bee Colony
3.3.1. Propuesta de Karaboga y Akay (2011)
Karaboga y Akay (2011)[17][2], proponen una serie de modi�caciones asu algoritmo original de ABC para manejar las restricciones, agregando dosparámetros: Modi�cation Rate (MR) y el Scout Production Period (SPP).El parámetro MR actúa en el operador de las abejas, produciendo así unasolución nueva ~vi que contiene parte del vector original ~xi y parte de lasolución generada por la Ecuación 3.1, el operador modi�cado se muestra enla Ecuación 3.3.
vi,g =
{~xi,g + φ(~xi,g − ~xk,g) si randj [0; 1] < MRxi,g en caso contrario
(3.3)
El SPP se aplica para controlar la frecuencia de la fase de las abejasexploradoras de esta manera la producción de soluciones nuevas mantiene ladiversidad en la población. Tal proceso es detallado en el Algoritmo 5, dondefallos es un contador que tiene cada solución y cuanti�ca las veces que no

3.3. ABC para problemas con restricciones 15
ha mejorado. Como técnica de manejo de restricciones utilizan las reglas deDeb [8] que se describen a continuación:
1. Dadas dos soluciones factibles, se escogerá aquella que tenga mejorvalor de aptitud
2. Dadas dos soluciones una factible y otra no factible se seleccionará lasolución factible
3. Dadas dos soluciones no factibles se mantendrá aquella que menos violelas restricciones
Algoritmo 5 Fase de las abejas exploradoras1: if MCN mod SPP = 0 then2: if max(fallos)>limite then3: Reemplazar ~xi con una nueva solución aleatoria.4: end if5: end if
La selección de fuentes de alimento por parte de las abejas observadorasse realiza por medio de una técnica de selección proporcional, popular en losalgoritmos genéticos y conocida como ruleta el cálculo de la probabilidad deselección de cada fuente de alimento se muestra en el algoritmo 6
Algoritmo 6 Cálculo de probailidades de cada fuente de alimento1: for i = 0 a SN do2: Calcular la probabilidad utilizando el valor de aptitud o la suma de
violación de restricciones.
pi =
0.5 +
(aptitudi
ΣSNj=1aptitudj
)∗ 0.5 Si la solución es factible(
1− violacioni
ΣSNj=1violacionj
)∗ 0.5 Si la solución no es factible
(3.4)donde violacion es la sumatoria de violación de restricciones de cadafuente de alimento, y aptitud se determina con base en los valores dela función objetivo a optimizar, como se detalla en la Ecuación 3.5
aptitudi =
{1/(1 + fi) sifi ≤ 01 + abs(fi) sifi < 0
(3.5)
Donde fi es el valor de la función objetivo de cada fuente de alimento.3: end for


Capítulo 4
Algoritmo Propuesto CMABC
En este capítulo se describirá el algoritmo memético que se propuso eimplementó al cual hemos llamado CMABC(Constraint Memetic Arti�cialBee Colony), usando como base el algoritmo de la propuesta de Karaboga yAkay [17][2].
Para el diseño del algoritmo se siguieron algunas de las preguntas guíadescritas en la sección 2.4. Se seleccionaron dos buscadores locales tomadosdel área de programación matemática, Hooke-Jeeves y Complex, dado que elproblema a resolver es la optimización numérica con restricciones, el funcio-namiento de estos métodos se describe en la siguiente sección. La búsquedalocal se aplica después de la fase de las abejas empleadas y se aplica a lamejor solución. Se implementó una métrica de convergencia basada en laaptitud [28][11] para determinar cuándo aplicar la búsqueda local y el re-emplazo seleccionado fue de tipo Lamarckniano. El detalle del algoritmo sepuede ver en el Algoritmo 11.
Con la intención de mejorar el desempeño del algoritmo se cambió eloperador de las abejas empleadas por uno basado en el comportamiento de laevolución diferencial , y se reemplazaron las reglas de Deb [8] por la técnicaε-contrained [33] para manejar las restricciones. De acuerdo a las pruebasrealizadas por Alizadegan en [3] variar la relación entre el número de abejasempleadas y observadoras puede ayudar a mejorar el comportamiento delalgoritmo esta propuesta fue considera también dentro del algoritmo �nal.
4.1. Buscadores locales
En esta sección se describirán los métodos de búsqueda local que se uti-lizaron en el algoritmo. Estos métodos son parte de la optimización directalos cuales no necesitan conocer el gradiente de la función. El método deHooke-Jeeves también conocido como búsqueda en patrón (Pattern search)fue desarrollado por Hooke y Jeeves [14] en 1961, mientras que el métodode Complex fue desarrollado por M.J. Box [5] en 1965, basado en el método
17

18 Capítulo 4. Algoritmo Propuesto CMABC
Simplex pero considerando restricciones.
4.1.1. Hooke-Jeeves
El método de Hooke-Jeeves consiste en una serie de movimientos de ex-ploración, y si éstos han sido satisfactorios se realiza el paso de patrón [9].El movimiento de exploración revisa la vecindad de la solución actual paraencontrar una mejor. Con estas dos soluciones se realiza un movimiento depatrón para encontrar una dirección de búsqueda que prometa mejoras.
4.1.1.1. Movimiento de exploración
Dada una solución inicial ~xc, es modi�cada en una de sus dimensiones porun vector de perturbación ∆ (cuyos valores van decrementando con el pasodel tiempo y el valor recomendado es de 0.5) tanto en su dirección positivacomo negativa, siempre se recuerda la mejor solución encontrada. Se iniciai = 1 y ~x = ~xc.
1. Calcular las funciones f = f(~x), f+ = f(~xi + ∆i) y f− = f(~xi −∆i),sumando y restando a la dimensión correspondiente el valor de ∆i
2. Se selecciona aquel que mejore el valor de la función. fmin = min(f, f+, f−).~x sera igual al que corresponda fmin.
3. Si no se han recorrido todas las dimensiones, repetimos desde el paso1, si ya se recorrieron ir al paso 4.
4. Si ~xc 6= ~x, entonces el movimiento de exploración ha tenido éxito, sino ha fallado.
4.1.1.2. Movimiento de patrón
Una nueva solución es encontrada desde la solución actual ~xc, en direccióna la mejor solución anterior ~x(k−1) y la solución base ~x(k) como se muestraen la Ecuación 4.1
~x(k+1) = ~x(k) + (~x(k) − ~x(k−1)) (4.1)
El algoritmo completo se describe en Algoritmo 7.Este método no considera las restricciones, de ahí que para el algoritmo
propuesto se selecciona la mejor solución con base en las reglas de Deb [8]. Porotro lado, para controlar que no haga evaluaciones excesivas hasta reducir∆, se agregó una contador de ciclos permitidos, cuyo limite original es 2,mientras mejore después de esos dos ciclos se le permite al algoritmo realizaruna ejecución más de la búsqueda.

4.1. Buscadores locales 19
Algoritmo 7 Hooke-Jeeves1: Seleccionar un punto inicial ~x0, inicializar el vector de incrementos ∆,
factor de reducción α y un valor de término ε2: while ||∆|| > ε do3: Realizar un movimiento de exploración4: if el movimiento de exploración es satisfactorio then5: ~x(k+1) = ~x6: k = k + 17: Realizar un movimiento de patrón usando la Ecuación4.18: else9: Dividir el vector de incrementos entre el factor de reducción ∆/α
10: end if11: end while
4.1.2. Complex
El método Complex [1] está basado en el método Simplex [9] sin embargoa diferencia de éste, Complex toma en cuenta las restricciones al momentode minimizar. Complex trabaja de la siguiente forma:
1. Primero generar el Complex inicial: A partir de una solución factible~xf se crearan K soluciones de acuerdo a la Ecuación 4.2
~xk = ~l + (~u−~l) ∗ rand (4.2)
Dónde ~l y ~u son los limites inferiores y superiores de la función objetivoy rand es un número aleatorio entre 0 y 1. Cada vez que se genere unanueva solución será evaluada y si no es factible, la solución se retraehacia el centroide del Complex aplicando la Ecuación 4.3. Este procesose repite hasta que ~xk sea factible, entonces se agrega esta solución alComplex y se continua generando soluciones hasta que se completenlos K requeridos.
~xk = ~xk + (1/2) ∗ (x− ~xk)x = (
∑ki ~xi)/K
(4.3)
2. A continuación se realiza el ciclo de mejora, el cual se detendrá cuan-do se ha alcanzado un límite de distancia δ entre las soluciones delcomplex. También se debe inicializar un factor de re�exión α.
En cada iteración se selecciona la solución con el peor valor de aptituddel Complex ~xw, una vez seleccionada se crea un nuevo vector usandola Ecuación 4.4
~xn = x+ α ∗ (x− ~xw) (4.4)

20 Capítulo 4. Algoritmo Propuesto CMABC
Si ~xn es mejor que ~xw, entonces lo reemplaza en el Complex, si noes mejorada se continua creando nuevas soluciones pero tomando co-mo base al actual ~xn. El algoritmo termina cuando la distancia en elComplex es menor o igual a δ o cuando la diferencia en la función deaptitud ha alcanzado un limite ϕ.
Los valores recomendados para K es d + 1 donde d es la dimensión delproblema, δ = 1e − 5, ϕ = 1e − 5 y para el factor de re�exión α = 1.3 deacuerdo a Box [5].
Este método asume que se inicia con un punto factible, y que la zonafactible es cóncava, requerimientos que no se pueden asegurar al momentode agregar el método al algoritmo ABC. Para poder mejorar soluciones nofactibles se le incluyeron las reglas de Deb, cuando se crea el Complex se lepermite mejorar sólo durante 3 ciclos si el punto no es factible, mientras queen el ciclo de mejora, si la solución no ha mejorado y la distancia euclidianaentre la solución actual y el centroide es menor o igual a δ o la diferenciaentre los valores de aptitud es menor a ϕ, entonces se detiene la búsqueda yen la siguiente iteración se seleccionará una solución aleatoriamente y no alpeor. El seudocódigo completo del método se detalla en el Algoritmo 8.
Algoritmo 8 Complex1: Inicializar el Complex
2: while√∑k
i (||~xi − x||)2 > δ y√∑k
i (f(xi)− f)2 > ϕ do3: Seleccionar al peor o una solución aleatoria del complex ~xw
4: Crear una nueva solución ~xn de acuerdo a la Ecuación 4.45: while ~xw sea mejor que ~xn de acuerdo a reglas de Deb y ||~xn−x|| > δ
do6: ~xn = (x+ ~xn)/27: end while8: if ~xn es mejor que ~xw then9: Reemplazar ~xw por ~xn
10: Continuar seleccionando a la peor solución del Complex11: else12: Seleccionar de manera aleatoria una solución en el siguiente ciclo13: end if14: end while15: Retornar la mejor solución del Complex
A continuación se describe el algoritmo memético basado en el propuestopor Karaboga y Akay [17]

4.2. Abeja empleada basada en Evolución Diferencial 21
4.2. Abeja empleada basada en Evolución Diferen-cial
Con la �nalidad de promover la mejora de las soluciones el operador delas abejas empleadas fue cambiado por el operador de la evolución diferencialrand/1/bin [32]. El operador original de las abejas empleadas lo podemos veren la Ecuación 3.1 en la Ecuación 4.5 se muestra el operador de la evolucióndiferencial, donde ~xr0,g, ~xr1,g,~xr2,g son tres vectores aleatorios de la poblaciónpero diferentes entre ellos, y f es un número por lo general mayor a 1.La �nalidad de incluir el operador de evolución diferencial es promover laexploración por parte de las abejas empleadas sin embargo para no añadirla calibración del parámetro f , se mantiene la φ del operador original de lasabejas, dado que éste es un valor entre 0 y 1. En el Algoritmo 9 se muestrael proceso modi�cado de las abejas empleadas.
~vi,g = ~xr0,g + f(~xr1,g − ~xr2,g) (4.5)
Algoritmo 9 Proceso de las abejas empleadas usando el operador de evo-lución diferencial1: Seleccionar ~xr0,g, ~xr1,g,~xr2,g diferentes entre ellos2: jrand = rand(N) // donde N es la dimensión del problema3: for i = 0 a i < N do4: if rand[0, 1] < MR o i = jrand then5: ~vi,g = ~xr0,g + φ(~xr1,g − ~xr2,g)6: else7: ~vi,g = ~xi,g //~xi,g la fuente de alimento actual8: end if9: end for
4.3. ε-constrained
Para el manejo de restricciones se reemplazaron las reglas de Deb [8],por el método de ε-contrained [33], en el cual la sumatoria de violación derestricciones se encuentra de�nida por el máximo de todas las restriccioneso por la suma de éstas, como se detalla en las Ecuaciones 4.6 y 4.7.
ϑ(x) = max{max{0, gj(x)},max|hj(x)|} (4.6)
ϑ(x) =∑||max{0, gj(x)}||P +
∑||hj(x)||P (4.7)
donde gj(~x), j = 1, . . . , q son las restricciones de desigualdad, hj(~x), j =1, . . . ,m las de igualdad, y P un número entero positivo.

22 Capítulo 4. Algoritmo Propuesto CMABC
Las forma de selección se realiza por medio del nivel de ϑ y se utiliza elpar (f(x), ϑ(x)), de acuerdo a la Ecuación 4.8.
(f1, ϑ1) < (f2, ϑ2)⇔
f1 < f2, if ϑ1, ϑ2 ≤ εf1 < f2, if ϑ1 = ϑ2
ϑ1 < ϑ2, en cualquier otro caso(4.8)
El valor inicial de epsilon está dado por la sumatoria de violación derestricciones de la θ-ésima solución de la población inicial. Este valor esactualizado durante cada iteración del algoritmo de acuerdo a la Ecuación4.9, hasta que el número de iteraciones t llegue al número de control TC, yes cuando el valor de ε se volverá 0.
ε(0) = ϑ(xθ)
ε(t) =
{ε(0)(1− (t/TC))cp, 0 < t < TC0, t ≥ TC
(4.9)
donde xθ es la θ-ésima solución, y θ = 0.2 ∗ N , donde N es número desoluciones, y cp es un número entero mayor o igual a 1 se recomienda quetome un valor de 3.
4.4. Convergencia basada en aptitud
Una parte importante del algoritmo memético que se propone es deter-minar el momento de aplicación del buscador local, una técnica usada porF. Neri [28] es medir la convergencia de la población basada en la aptitudde las soluciones como se muestra en la Ecuación 4.10.
ψ = 1−∣∣∣∣favg − fbfw − fb
∣∣∣∣ (4.10)
donde fb, favg, fw son el mejor, media y peor valor de aptitud de la población,el valor de ψ tiende a 1 cuando hay mucha diversidad (poca convergencia) y a0 si hay poca diversidad (se esta convergiendo). Esta medida de convergenciase propone en un problema de optimización sin restricciones en [28] el autorajusta un valor para determinar cuándo se aplica el buscador local.
Para utilizarla en el algoritmo propuesto en esta tesis se calculó ψf paralas soluciones factibles y ψnf para las soluciones no factibles, y para deter-minar si se aplica o no el buscador local se genera un número aleatorio entre0 y 1 y si este valor es menor o igual al ψ se aplica el buscador local conesto se espera que el buscador local disminuya su frecuencia de aplicaciónconforme pasan los ciclos. Este proceso se detalla en el Algoritmo 10.
Se agrega un parámetro de control G para saber en que ciclo tomar encuenta la información de convergencia de la población no factible, siempreque no existan soluciones factibles.

4.5. Algoritmo Completo 23
Algoritmo 10 Aplicación del buscador local1: if Existen soluciones factibles then2: Calcular ψ usando la Ecuación 4.10 sólo considerando las soluciones
factibles3: else4: if ciclo actual >G then5: Calcular ψ usando la Ecuación 4.10 sólo considerando las soluciones
no factibles6: end if7: end if8: if rand(0, 1) ≤ ψ then9: Aplicar buscador local
10: end if
4.5. Algoritmo Completo
En las secciones anteriores se describieron algunas de las partes que com-prenden el algoritmo memético propuesto en este trabajo de tesis. A conti-nuación se muestra el algoritmo 11, donde se tiene el detalle completo cuyabase es el algoritmo ABC propuesto por Karaboga y Akay [17].
Para decidir a que solución de la población aplicar el buscador local seusa el Algoritmo 12.
En este algoritmo xbg y xbg−1 son la mejor solución del ciclo actual y del
ciclo anterior,respectivamente. Dado que los buscadores locales que se pro-ponen son deterministas, ésto es, para una solución dada siempre obtendránla misma solución, y por esta razón se busca promover el uso del buscadorlocal con una solución de la cual se desconozca su vecindad.

24 Capítulo 4. Algoritmo Propuesto CMABC
Algoritmo 11 Memético propuesto1: Inicializar la población de soluciones ~xi,0, i = 1, ..., SN2: Calcular el limite para abandonar la fuente de alimento limit = (FES−SN)/(SN2): donde FES el número de evaluaciones permitidas
3: Evaluar la población4: while no se alcance FES do5: Aplicar el operador de la Ecuación 4.5 a cada una de las fuentes de
alimento, manteniendo las mejores6: Calcular las probabilidades de selección de las fuentes de alimento de
acuerdo al Algoritmo 67: Calcular cuantas abejas observadoras deberán ser seleccionadas
onlookers = (SN/employedR) ∗ onlookerR: donde employedR yonlookerR son la relación entre el número de abejas empleadas y ob-servadoras, comúnmente esta relación es de 1:1
8: Seleccionar las soluciones que serán visitadas por las abejas observa-doras mediante una ruleta
9: Generar nuevas soluciones ~vi,g para las abejas observadoras usando eloperador de la Ecuación 3.1 y evaluarlas
10: Conservar la mejor solución entre la actual ~xi,g y ~vi,g11: Aplicar el buscador local de acuerdo a los Algoritmos 10 y 1212: if mejoró la solución then13: Reemplazar la mejor con la solución dada por el buscador local14: else15: Reemplazar la peor solución de la población16: end if17: Veri�car si existen fuentes abandonadas (si ya se alcanzó el limit) y
reemplazarlas por soluciones generadas de manera aleatoria por lasabejas exploradoras.
18: Conservar la mejor solución encontrada hasta el momento19: end while
Algoritmo 12 Selección de solución para aplicar el buscador local
1: if NO se ha aplicado el buscador local o ~xbg 6= ~xbg−1 then
2: Aplicar el buscador local a la mejor solución del ciclo actual (xbg)3: else4: Aplicar el buscador local a una solución seleccionada de manera alea-
toria5: end if

Capítulo 5
Resultados y discusión
En este capítulo se presentan y discuten los resultados obtenidos por elalgoritmo memético propuesto con los buscadores local Hooke-Jevees (CM-ABC-HJ) y Complex (CM-ABC-COM).
5.1. Diseño del experimento
Para evaluar el desempeño y comportamiento del algoritmo meméticopropuesto, se utilizaron los conjuntos de prueba del congreso de ComputaciónEvolutiva (CEC) de la IEEE en sus versiones del CEC2006 y CEC2010 quecontienen diferentes tipos de funciones con restricciones tanto de igualdadcomo de desigualdad.
En la Tabla 5.3 se resumen las características principales del conjunto defunciones de prueba del CEC2006 en esta tabla D es el número de variablesdel problema, LI es el número de restricciones lineales de desigualdad, NIes el número de restricciones no-lineales de desigualdad, LE es el número derestricciones lineales de igualdad, NE el número de restricciones no-linealesde igualdad, a es el número de restricciones activas en ~x y ρ = |F |/|S| es unamedida para aproximar el tamaño de la región factible con respecto a todoel espacio de búsqueda, donde |F | es el número de soluciones factibles y |S|el total de soluciones generadas aleatoriamente. En [25] Michalewicz sugiereun total de 1,000,000 de soluciones para |S|. En la Tabla 5.4 se muestran loslímites para las variables y el valor de aptitud f(~x) óptimo de cada función.El detalle de las funciones de este conjunto de pruebas puede verse en [15] yen apéndice C.
La Tabla 5.5 muestra las características principales del conjunto de prue-bas del CEC2010, en [30] y en el apéndice C se puede ver el detalle de lasfunciones cabe destacar que de este conjunto de funciones se desconoce suvalor óptimo.
El algoritmo CMABC se ejecutó de acuerdo a los requerimientos de losconjuntos de prueba. Para el CEC2006 se realizaron 25 ejecuciones por cada
25

26 Capítulo 5. Resultados y discusión
función y considerando un máximo de 500,000 evaluaciones. El conjunto deprueba del CEC2010 al ser problemas escalables, se ejecuta con dimensión10 y 30 para cada función, en ambos casos se consideran 25 ejecuciones delalgoritmo, y un máximo de 200,000 evaluaciones para la dimensión 10 y600,000 para la dimensión 30.
A los resultados se le aplicó la prueba estadística de Wilcoxon, que esuna prueba no paramétrica que compara las medianas de dos muestras re-lacionas, para determinar si existen diferencias signi�cativas entre ellas, seutiliza cuando no se puede suponer la normalidad en dichas muestras [35].
5.1.1. Parámetros de los algoritmos
En las Tablas 5.1 y 5.2 se muestran los parámetros con los que se probaronlos algoritmos.
MABC-SF es el algoritmo MABC-SmartFlight propuesto por Cetinaen [23].
MABC de Karaboga [17] descrito en el capítulo 3.
CM-ABC-HJ y CM-ABC-COM con los buscadores locales Hooke-Jeevesy Complex, respectivamente.
Los parámetros para los algoritmos MABC y MABC-SF son los descritos enla literatura en la que se proponen. Para las versiones meméticas CM-ABCse calibraron con la herramienta IRACE [22], sin embargo los resultados deesta calibración fueron inferiores a los obtenidos por la calibración empírica,estos últimos son los que se presentan.
Tabla 5.1: Parámetros para los algoritmos: SN es el número de fuentes dealimento, MR el Modi�cation Ratio, MCN el máximo de ciclos, LIMITE
máximo de ciclos que una fuente puede permanecer sin mejora, ERROR I yERROR F son la tolerancia inicial y �nal para restricciones de igualdad. Des la dimensión del problema.
SN MR MCN LIMITE ERROR I / ERROR F
MACBSF 50 0.8 5800 45 1/1E-5MABC 50 0.8 0.5*SN*D
Los parámetros mostrados en la Tabla 5.2 son: G ciclo para considerarla población no factible, TC ciclo en el que el valor de ε sea igual a 0, CPvelocidad de decremento para ε, P exponente de penalización para la su-matoria de violación de restricciones. Valores para el método Hooke-Jeves,ε es la tolerancia de distancia entre las soluciones, α es el factor de reduc-ción, ∆ es el vector de incrementos. Los parámetros para el método Com-plex son, ϕ diferencia mínima entre los valores de aptitud de las soluciones,θ es el factor de contracción y δ la distancia mínima entre las soluciones.

5.2. Resultados 27
Employed/Onlooker es la relación entre el número de abejas empleadas yabejas observadoras.
Tabla 5.2: Parámetros el algoritmo propuesto y los buscadores locales. Hooke-Jeeves: ε distancia mínima para terminar, α factor de reducción, ∆ vector deincrementos. Complex: ϕ diferencia mínima entre la aptitud de las soluciones,α factor de re�exión, δ distancia mínima entre las soluciones. MC-ABC: SNnúmero de fuentes de alimento, MR Modi�cation Ratio, G ciclo para con-siderar convergencia no factible. ε-constraint: TC ciclo donde ε es mínimo,CP factor de reducción de ε, P potencia para la suma de restricciones.
MC-ABC HOOKE JEEVES
SN MR G ε α ∆
100 0.8 500 1.00E-005 2 0.5ε-CONSTRAINT COMPLEX
TC CP P ϕ α δ
500 3 1 1.00E-005 1.3 1.00E-005
5.2. Resultados
Las Tablas 5.6,5.7 y 5.8 muestran los resultados estadísticos obtenidosde cada algoritmo en las funciones del conjunto de prueba del CEC2006 yla prueba de Wilcoxon respecto a CMACB-HJ. Se puede observar para lasfunciones G01, G06, G08, G12, G16 y G24 todos los algoritmos encuentranel valor óptimo, y en las funciones G20, G21 y G22 ninguno logra realizarejecuciones con resultados factibles. MABC de Karaboga encuentra el óptimoen la función G02, sin embargo en las funciones G14 y G23 es el único queno encuentra soluciones factibles. Y en las funciones G03, G04, G05, G07,G09, G13, G15, G17, G18 y G19 todos los algoritmos encuentran solucionesfactibles, sin embargo no logran obtener el valor óptimo. Los algoritmosmeméticos logran generar más ejecuciones factibles.
Para el conjunto de pruebas del CEC2010 se desconocen los valores ópti-mos, sin embargo utilizamos los obtenidos por Takahama y Sakai [33]. En lastablas 5.9 y 5.10 se muestran los resultados para las funciones del CEC2010con dimensión 10, y en la Tabla A.2 se presenta la prueba estadística deWilcoxon para estos resultados. El algoritmo MABCSF únicamente en lafunción C11 no encuentra soluciones factibles, MABC en las funciones C03,C04, C05, C06, C09, C10, C11 y C16 no logra ninguna ejecución factible,y solamente el algoritmo CMABC-HJ en todas las funciones encuentra re-sultados factibles. En las funciones C01, C5, C06, C13 y C16 el algoritmoCMABC-HJ llega al óptimo obtenido por Takahama. En C18 CMABC-HJencuentra un mejor resultado que el reportado por Takahama.
28 Capítulo 5. Resultados y discusión
Los resultados estadísticos para el conjunto de pruebas de CEC2010 endimensión 30, son mostradas en las Tablas 5.11 y 5.12 y en la Tabla A.3 laprueba de Wilcoxon. En estos resultados podemos observar que ninguno delos algoritmos logra resultados factibles en todas las funciones. Sin embargoCMABC-HJ en las funciones C02, C03, C16 y C17 logra encontrar el óptimoreportado por Takahama, y en C13 y C18 encuentra un valor más bajo.
En el apéndice A se muestra el detalle de las pruebas de Wilcoxon en-tre los algoritmos probados. Y en el B se muestran todas las grá�cas deconvergencia de cada una de las funciones.
5.3. Discusión
5.3.1. Resultados CEC2006
Es interesante observar que con respecto al conjunto de prueba del CEC2006,el algoritmo propuesto CMABC (en sus dos variantes con diferente bus-cador local), tienen mejor rendimiento (estadísticamente signi�cativo) queMABCSF y MABC, en cuanto a la generación de soluciones factibles sólo enlas funciones G15 y G23 obtuvieron menos de las 25 ejecuciones, lo cual nosdice que éstos son más estables. Ésto lo podemos veri�car observando queexisten diferencias signi�cativas, entre los desempeños observados en talesalgoritmos.
De acuerdo a la prueba de Wilcoxon el algoritmo memético con el bus-cador local Hooke-Jeeves tiene mejor comportamiento en las funciones G02,G03, G06, G07, G10, G12, G13, G14, G18, G19 Y G24. Mientras que MCABC-COM sólo en la función G16. Ambos algoritmos tienen comportamiento si-milar y son mejores que MABC y MABC-SF en las funciones G01, G04,G05, G08, G09, G11, G15, G17 y G23.
En Figura 5.1 se muestra la grá�ca de convergencia para la función G01,en ésta observamos que el comportamiento de los algoritmos es muy similar,sin embargo se destaca que MABC-SF es el que converge mas rápido, yMABC es el que lo hace mas lento.
La grá�ca de convergencia para función G04 mostrada en 5.2 muestrala reducción en la velocidad de convergencia en los algoritmos meméticospropuestos.
En la Figura 5.3 se aprecia mejor la velocidad de convergencia, en estafunción MABC no encontró soluciones factibles. Podemos observar que laversion CMABC-COM encuentra la zona factible más rápido que los otros,CMABC-HJ tarda más en entrar en la zona factible pero encuentra mejoresresultados.
Las funciones G20, G21 y G22 son difíciles de resolver pues, son las quetiene mayor numero de restricciones de igualdad no lineales. Se puede apre-ciar en las grá�cas de convergencia que los algoritmos meméticos requieren

5.3. Discusión 29
un mayor número de evaluaciones por ciclo que MABC y MABC-SF. Loscomportamientos aquí descritos se comparten en general para las funcionesdel CEC2006.
5.3.2. Resultados CEC2010
Las funciones del CEC2010 presentan un reto para los algoritmos basadosen ABC, sin embargo para las funciones en dimensión 10 se observa que losalgoritmos meméticos superan en desempeño a MABC y MABC-SF.
El algoritmo memético que incorpora al método de Hooke-Jeeves obtienemejores resultados y desempeño que su similar Complex, en las funcionesC01, C03, C05, C07, C08, C09, C11, C13, C14, C16 y C18. Mientras queen las funciones C02 y C10 su comportamiento es similar. Es interesanteobservar que en las funciones C14 y C15 aunque se logra alcanzar la zonafactible, los resultados están muy alejados de los reportados por Takahama,se observa que estas funciones no son separables y que sólo cuentan conrestricciones de desigualdad, sin embargo aunque estas características lascomparten con otras funciones, su espacio de búsqueda es grande.
En estas funciones en la dimension 30, el rendimiento en general de losalgoritmos decae, para las funciones C04, C05, C06 y C11 ambos algoritmosmeméticos no logran alcanzar la zona factible.
Se continua observando un mejor rendimiento por parte de CMABC-HJrespecto a los demás algoritmos, incluso en las funciones C17 y C18 encuentramejores resultados que los reportados por Takahama.
En la Figura 5.4 se muestra la grá�ca de convergencia para la funciónC01 en dimensión 30, en ella el mejor valor encontrado fue por MABC.Podemos ver que el comportamiento de los algoritmos meméticos es muysimilar, y requieren más evaluaciones por ciclo, sobre todo el que tiene elmétodo Complex. Al parecer los buscadores locales no están ayudando enla mejora de las soluciones como se espera. Este comportamiento se re�ejade igual manera en las funciones C14 y C15, de las cuales se muestran susgrá�cas de convergencia en las Figuras 5.5 y 5.6.

30 Capítulo 5. Resultados y discusión
Figura 5.1: Grá�ca de convergencia de la función G01
Figura 5.2: Grá�ca de convergencia de la función G04

5.3. Discusión 31
Figura 5.3: Grá�ca de convergencia de la función G23
Figura 5.4: Grá�ca de convergencia de la función C01 dimensión 30

32 Capítulo 5. Resultados y discusión
Figura 5.5: Grá�ca de convergencia de la función C14 dimensión 30

5.3. Discusión 33
Figura 5.6: Grá�ca de convergencia de la función C15 dimensión 30

34 Capítulo 5. Resultados y discusión
Tabla 5.3: Características de las funciones del conjunto de prueba delCEC2006. D número de variables del problema, ρ porcentaje aproximadode la zona factible, LI y NI restricciones de desigualdad lineales y no li-neales, LE y NE son el número de restricciones de igualdad lineales y nolineales. a es el número de restricciones activas
Prob. D Tipo de Función ρ LI NI LE NE ag01 13 cuadrática 0.0111% 9 0 0 0 6g02 20 no lineal 99.9971% 0 2 0 0 1g03 10 polinomial 0.0000% 0 0 0 1 1g04 5 cuadrática 52.1230% 0 6 0 0 2g05 4 cúbica 0.0000% 2 0 0 3 3g06 2 cúbica 0.0066% 0 2 0 0 2g07 10 cuadrática 0.0003% 3 5 0 0 6g08 2 no lineal 0.8560% 0 2 0 0 0g09 7 polinomial 0.5121% 0 4 0 0 2g10 8 lineal 0.0010% 3 3 0 0 6g11 2 cuadrática 0.0000% 0 0 0 1 1g12 3 cuadrática 4.7713% 0 1 0 0 0g13 5 no lineal 0.0000% 0 0 0 3 3g14 10 no lineal 0.0000% 0 0 3 0 3g15 3 cuadrática 0.0000% 0 0 1 1 2g16 5 no lineal 0.0204% 4 34 0 0 4g17 6 no lineal 0.0000% 0 0 0 4 4g18 9 cuadrática 0.0000% 0 13 0 0 6g19 15 no lineal 33.4761% 0 5 0 0 0g20 24 lineal 0.0000% 0 6 2 12 16g21 7 lineal 0.0000% 0 1 0 5 6g22 22 lineal 0.0000% 0 1 8 11 19g23 9 lineal 0.0000% 0 2 3 1 6g24 2 lineal 79.6556% 0 2 0 0 2

5.3. Discusión 35
Tabla 5.4: Límites y valor óptimo de las funciones del conjunto de pruebadel CEC2006
Prob. D f(~x) Límitesg01 13 -15 0 ≤ ~xi ≤ 1(i = 1, . . . , 9), 0 ≤ ~xi ≤ 100(i = 10, 11, 12) y
0 ≤ ~x13 ≤ 1
g02 20 -0.8036191042 0 < ~xi ≤ 10(i = 1, . . . , n)
g03 10 -1.0005001 0 ≤ ~xi ≤ 1(i = 1, . . . , n)
g04 5 -30665.5386717834 78 ≤ ~x1 ≤ 102, 33 ≤ ~x2 ≤ 45 y 27 ≤ ~xi ≤ 45(i = 3, 4, 5)
g05 4 5126.4967140071 0 ≤ ~x1 ≤ 1200, 0 ≤ ~x2 ≤ 1200,−0.55 ≤ ~x3 ≤ 0.55 y −0.55 ≤~x4 ≤ 0.55
g06 2 -6961.8138755802 13 ≤ ~x1 ≤ 100 y 0 ≤ ~x2 ≤ 100
g07 10 24.3062090681 −10 ≤ ~xi ≤ 10(i = 1, . . . , 10)
g08 2 -0.0958250415 0 ≤ ~x1 ≤ 10 y 0 ≤ ~x2 ≤ 10
g09 7 680.6300573745 −10 ≤ ~xi ≤ 10 para (i = 1, . . . , 7)
g10 8 7049.2480205286 100 ≤ ~x1 ≤ 10000, 1000 ≤ ~xi ≤ 10000(i = 2, 3) y 10 ≤ ~xi ≤1000(i = 4, . . . , 8)
g11 2 0.7499 −1 ≤ ~x1 ≤ 1 y −1 ≤ ~x2 ≤ 1
g12 3 -1 0 ≤ ~xi ≤ 10(i = 1, 2, 3) y p, q, r = 1, 2, . . . , 9
g13 5 0.053941514 −2.3 ≤ ~xi ≤ 2.3(i = 1, 2) y −3.2 ≤ ~xi ≤ 3.2(i = 3, 4, 5)
g14 10 -47.7648884595 0 < ~xi ≤ 10(i = 1, . . . , 10)
g15 3 961.7150222899 0 ≤ ~xi ≤ 10(i = 1, 2, 3)
g16 5 -1.9051552586 704.4148 ≤ ~x1 ≤ 906.3855, 68.6 ≤ ~x2 ≤ 288.88, 0 ≤ ~x3 ≤134.75, 193 ≤ ~x4 ≤ 287.0966, 25 ≤ ~x5 ≤ 84.1988
g17 6 8853.5396748064 0 ≤ ~x1 ≤ 400, 0 ≤ ~x2 ≤ 1000, 340 ≤ ~x3 ≤ 420, 340 ≤ ~x4 ≤420,−1000 ≤ ~x5 ≤ 1000 y 0 ≤ ~x6 ≤ 0.5236
g18 9 -0.8660254038 −10 ≤ ~xi ≤ 10(i = 1, . . . , 8) y 0 ≤ ~x9 ≤ 20
g19 15 32.6555929502 0 ≤ ~xi ≤ 10(i = 1, . . . , 15)
g20 24 0.2049794002 0 ≤ ~xi ≤ 10(i = 1, . . . , 24)
g21 7 193.72451007 0 ≤ ~x1 ≤ 1000, 0 ≤ ~x2, ~x3 ≤ 40, 100 ≤ ~x4 ≤ 300, 6.3 ≤ ~x5 ≤6.7, 5.9 ≤ ~x6 ≤ 6.4 y 4.5 ≤ ~x7 ≤ 6.25
g22 22 236.430975504 0 ≤ ~x1 ≤ 20000, 0 ≤ ~x2, ~x3, ~x4 ≤ 1 × 106, 0 ≤ ~x5, ~x6, ~x7 ≤4× 107
100 ≤ ~x8 ≤ 299.99, 100 ≤ ~x9 ≤ 399.99, 100.01 ≤ ~x10 ≤300, 100 ≤ ~x11 ≤ 400100 ≤ ~x12 ≤ 600, 0 ≤ ~x13, ~x14, ~x15 ≤ 500, 0.01 ≤ ~x16 ≤ 3000.01 ≤ ~x17 ≤ 400,−4.7 ≤ ~x18, ~x19, ~x20, ~x21, ~x22 ≤ 6.25
g23 9 -400.0551 0 ≤ ~x1, ~x2, ~x6 ≤ 300, 0 ≤ ~x3, ~x5, ~x7 ≤ 100, 0 ≤ ~x4, ~x8 ≤ 200 y0.01 ≤ ~x9 ≤ 0.03
g24 2 -5.5080132716 0 ≤ ~x1 ≤ 3 y 0 ≤ ~x2 ≤ 4

36 Capítulo 5. Resultados y discusión
Tabla 5.5: Características de las funciones del conjunto de prueba delCEC2010. D es el número de variables del problema, E es el númerode restricciones de igualdad, I el número de restricciones de desigualdad.ρ = |F |/|S| es el porcentaje estimado entre la región factible y el espacio debúsqueda
Prob. Rango Tipo de objetivo E I Región factible10D 30D
C01 [0, 10]D No separable 0 2 0.997689% 1.000000%C02 [−5.12, 5.12]D Separable 1 2 0.000000% 0.000000%C03 [−1000, 1000]D No separable 1 0 0.000000% 0.000000%C04 [−50, 50]D Separable 4 0 0.000000% 0.000000%C05 [−600, 600]D Separable 2 0 0.000000% 0.000000%C06 [−600, 600]D Separable 2 0 0.000000% 0.000000%C07 [−140, 140]D No separable 0 1 0.505123% 0.503725%C08 [−140, 140]D No separable 0 1 0.379512% 0.375278%C09 [−500, 500]D No separable 1 0 0.000000% 0.000000%C10 [−500, 500]D No separable 1 0 0.000000% 0.000000%C11 [−100, 100]D Rotado 1 0 0.000000% 0.000000%C12 [−1000, 1000]D Separable 1 1 0.000000% 0.000000%C13 [−500, 500]D Separable 0 3 0.000000% 0.000000%C14 [−1000, 1000]D No separable 0 3 0.003112% 0.006123%C15 [−1000, 1000]D No separable 0 3 0.003210% 0.006023%C16 [−10, 10]D No separable 2 2 0.000000% 0.000000%C17 [−10, 10]D No separable 1 2 0.000000% 0.000000%C18 [−50, 50]D No separable 1 1 0.000010% 0.000000%

5.3. Discusión 37
Tabla 5.6: Estadísticas del conjunto de pruebas CEC2006: funciones G01a G08. En negrita se resaltan los mejores resultados. Para la prueba deWilcoxon: + es que hay diferencia signi�cativa a favor de CM-ABC-HJ, - encontra y = que no existe diferencia signi�cativa.
CM-ABC-HJ MABC-SF MABC CM-ABC-COM
G01 Factibles 25 25 25 25-1.50E+01 Mejor -1.50E+01 -1.50E+01 -1.50E+01 -1.50E+01
Mediana -1.50E+01 -1.50E+01 -1.50E+01 -1.50E+01Media -1.50E+01 -1.46E+01 -1.50E+01 -1.50E+01Desv. Std. 0.00E+00 7.07E-01 0.00E+00 0.00E+00Peor -1.50E+01 -1.24E+01 -1.50E+01 -1.50E+01Wilcoxon + = =
G02 Factibles 25 25 25 25-8.04E-01 Mejor -8.04E-01 -6.94E-01 -8.04E-01 -7.88E-01
Mediana -7.93E-01 -5.09E-01 -8.04E-01 -7.50E-01Media -7.90E-01 -4.92E-01 -8.03E-01 -7.37E-01Desv. Std. 1.25E-02 1.05E-01 1.55E-03 4.22E-02Peor -7.64E-01 -2.35E-01 -7.97E-01 -6.30E-01Wilcoxon + - +
G03 Factibles 25 20 25 25-1.00E+00 Mejor -1.00E+00 -1.00E+00 -5.85E-01 -1.00E+00
Mediana -1.00E+00 -1.00E+00 -2.62E-01 -1.00E+00Media -1.00E+00 -8.82E-01 -2.88E-01 -1.00E+00Desv. Std. 1.83E-08 2.26E-01 1.34E-01 2.98E-04Peor -1.00E+00 -2.37E-01 -7.78E-02 -9.99E-01Wilcoxon + + +
G04 Factibles 25 25 25 25-3.07E+04 Mejor -3.07E+04 -3.06E+04 -3.07E+04 -3.07E+04
Mediana -3.07E+04 -3.06E+04 -3.07E+04 -3.07E+04Media -3.07E+04 -3.05E+04 -3.07E+04 -3.07E+04Desv. Std. 4.87E-12 1.23E+02 4.64E-12 5.20E-12Peor -3.07E+04 -3.02E+04 -3.07E+04 -3.07E+04Wilcoxon + = =
G05 Factibles 25 10 11 255.13E+03 Mejor 5.13E+03 5.13E+03 5.13E+03 5.13E+03
Mediana 5.13E+03 5.26E+03 5.13E+03 5.13E+03Media 5.13E+03 5.30E+03 5.17E+03 5.13E+03Desv. Std. 1.49E-12 1.98E+02 7.98E+01 1.41E-12Peor 5.13E+03 5.76E+03 5.40E+03 5.13E+03Wilcoxon + + =
G06 Factibles 25 25 25 25-6.96E+03 Mejor -6.96E+03 -6.96E+03 -6.96E+03 -6.96E+03
Mediana -6.96E+03 -6.96E+03 -6.96E+03 -6.96E+03Media -6.96E+03 -6.73E+03 -6.96E+03 -6.96E+03Desv. Std. 3.71E-12 5.14E+02 3.71E-12 3.85E-07Peor -6.96E+03 -5.17E+03 -6.96E+03 -6.96E+03Wilcoxon + = +
G07 Factibles 25 25 25 252.43E+01 Mejor 2.43E+01 2.51E+01 2.44E+01 2.43E+01
Mediana 2.43E+01 2.80E+01 2.44E+01 2.43E+01Media 2.43E+01 2.89E+01 2.44E+01 2.43E+01Desv. Std. 2.30E-06 3.69E+00 7.30E-02 1.44E-04Peor 2.43E+01 4.00E+01 2.47E+01 2.43E+01Wilcoxon + + +
G08 Factibles 25 25 25 25-9.58E-02 Mejor -9.58E-02 -9.58E-02 -9.58E-02 -9.58E-02
Mediana -9.58E-02 -9.58E-02 -9.58E-02 -9.58E-02Media -9.58E-02 -9.32E-02 -9.58E-02 -9.58E-02Desv. Std. 1.42E-17 1.33E-02 1.42E-17 1.42E-17Peor -9.58E-02 -2.91E-02 -9.58E-02 -9.58E-02Wilcoxon + = =
38 Capítulo 5. Resultados y discusión
Tabla 5.7: Estadísticas del conjunto de pruebas CEC2006: funciones G09a G16. En negrita se resaltan los mejores resultados. Para la prueba deWilcoxon: + es que hay diferencia signi�cativa a favor de CM-ABC-HJ, - encontra y = que no existe diferencia signi�cativa.
CM-ABC-HJ MABC-SF MABC CM-ABC-COM
G09 Factibles 25 25 25 256.81E+02 Mejor 6.81E+02 6.81E+02 6.81E+02 6.81E+02
Mediana 6.81E+02 6.82E+02 6.81E+02 6.81E+02Media 6.81E+02 6.83E+02 6.81E+02 6.81E+02Desv. Std. 3.26E-13 2.54E+00 3.07E-03 3.50E-13Peor 6.81E+02 6.90E+02 6.81E+02 6.81E+02Wilcoxon + + =
G10 Factibles 25 24 25 257.05E+03 Mejor 7.05E+03 7.24E+03 7.06E+03 7.05E+03
Mediana 7.05E+03 8.35E+03 7.11E+03 7.05E+03Media 7.05E+03 9.50E+03 7.14E+03 7.05E+03Desv. Std. 3.62E-06 2.66E+03 7.74E+01 7.59E-02Peor 7.05E+03 1.64E+04 7.35E+03 7.05E+03Wilcoxon + + +
G11 Factibles 25 16 25 257.50E-01 Mejor 7.50E-01 7.50E-01 7.50E-01 7.50E-01
Mediana 7.50E-01 7.50E-01 7.52E-01 7.50E-01Media 7.50E-01 7.50E-01 7.59E-01 7.50E-01Desv. Std. 3.40E-16 2.15E-04 1.45E-02 3.30E-16Peor 7.50E-01 7.51E-01 8.05E-01 7.50E-01Wilcoxon + + =
G12 Factibles 25 25 25 25-1.00E+00 Mejor -1.00E+00 -1.00E+00 -1.00E+00 -1.00E+00
Mediana -1.00E+00 -1.00E+00 -1.00E+00 -1.00E+00Media -1.00E+00 -9.96E-01 -1.00E+00 -1.00E+00Desv. Std. 0.00E+00 9.83E-03 0.00E+00 3.71E-08Peor -1.00E+00 -9.51E-01 -1.00E+00 -1.00E+00Wilcoxon + = +
G13 Factibles 25 9 2 255.39E-02 Mejor 5.39E-02 5.94E-02 9.97E-01 5.39E-02
Mediana 5.39E-02 5.00E-01 1.00E+00 5.39E-02Media 5.39E-02 5.69E-01 9.98E-01 5.40E-02Desv. Std. 8.01E-18 5.99E-01 2.06E-03 5.97E-06Peor 5.39E-02 2.04E+00 1.00E+00 5.40E-02Wilcoxon + + +
G14 Factibles 25 7 0 25-4.78E+01 Mejor -4.78E+01 -4.67E+01 � -4.78E+01
Mediana -4.77E+01 -4.56E+01 � -4.77E+01Media -4.77E+01 -4.55E+01 � -4.77E+01Desv. Std. 4.95E-02 1.18E+00 � 1.13E-01Peor -4.76E+01 -4.32E+01 � -4.73E+01Wilcoxon + + +
G15 Factibles 13 16 24 179.62E+02 Mejor 9.62E+02 9.62E+02 9.62E+02 9.62E+02
Mediana 9.62E+02 9.63E+02 9.65E+02 9.62E+02Media 9.62E+02 9.63E+02 9.65E+02 9.62E+02Desv. Std. 2.37E-13 8.68E-01 2.18E+00 3.52E-13Peor 9.62E+02 9.65E+02 9.69E+02 9.62E+02Wilcoxon + + =
G16 Factibles 25 25 25 25-1.91E+00 Mejor -1.91E+00 -1.91E+00 -1.91E+00 -1.91E+00
Mediana -1.91E+00 -1.85E+00 -1.91E+00 -1.91E+00Media -1.91E+00 -1.79E+00 -1.91E+00 -1.91E+00Desv. Std. 6.84E-16 1.25E-01 4.53E-16 5.80E-16Peor -1.91E+00 -1.50E+00 -1.91E+00 -1.91E+00Wilcoxon + - =

5.3. Discusión 39
Tabla 5.8: Estadísticas del conjunto de pruebas CEC2006: funciones G17a G24. En negrita se resaltan los mejores resultados. Para la prueba deWilcoxon: + es que hay diferencia signi�cativa a favor de CM-ABC-HJ, - encontra y = que no existe diferencia signi�cativa.
CM-ABC-HJ MABC-SF MABC CM-ABC-COM
G17 Factibles 25 5 4 258.85E+03 Mejor 8.85E+03 8.94E+03 8.93E+03 8.85E+03
Mediana 8.93E+03 8.95E+03 8.94E+03 8.93E+03Media 8.91E+03 9.04E+03 8.94E+03 8.91E+03Desv. Std. 3.56E+01 1.36E+02 8.87E+00 3.47E+01Peor 8.95E+03 9.23E+03 8.95E+03 8.95E+03Wilcoxon + + =
G18 Factibles 25 25 25 25-8.66E-01 Mejor -8.66E-01 -8.66E-01 -8.66E-01 -8.66E-01
Mediana -8.66E-01 -5.06E-01 -7.04E-01 -6.75E-01Media -7.90E-01 -6.09E-01 -7.51E-01 -7.59E-01Desv. Std. 9.55E-02 1.51E-01 8.56E-02 9.68E-02Peor -6.75E-01 -4.36E-01 -6.71E-01 -6.75E-01Wilcoxon + - +
G19 Factibles 25 25 25 253.27E+01 Mejor 3.27E+01 4.94E+01 3.47E+01 3.27E+01
Mediana 3.27E+01 8.74E+01 3.58E+01 3.27E+01Media 3.27E+01 9.26E+01 3.58E+01 3.27E+01Desv. Std. 1.13E-02 2.85E+01 4.52E-01 2.47E-02Peor 3.27E+01 1.54E+02 3.66E+01 3.28E+01Wilcoxon + + +
G20 Factibles 0 0 0 09.67E-02 Mejor � � � �
Mediana � � � �Media � � � �Desv. Std. � � � �Peor � � � �Wilcoxon
G21 Factibles 0 0 0 01.94E+02 Mejor � � � �
Mediana � � � �Media � � � �Desv. Std. � � � �Peor � � � �Wilcoxon
G22 Factibles 0 0 0 02.36E+02 Mejor � � � �
Mediana � � � �Media � � � �Desv. Std. � � � �Peor � � � �Wilcoxon
G23 Factibles 23 2 0 22-4.00E+02 Mejor -3.89E+02 -1.44E+02 � -3.88E+02
Mediana -2.80E+02 1.16E+02 � -2.02E+02Media -2.39E+02 -1.41E+01 � -1.64E+02Desv. Std. 1.60E+02 1.84E+02 � 1.78E+02Peor 2.49E+02 1.16E+02 � 3.39E+02Wilcoxon = + =
G24 Factibles 25 25 25 25-5.51E+00 Mejor -5.51E+00 -5.51E+00 -5.51E+00 -5.51E+00
Mediana -5.51E+00 -5.51E+00 -5.51E+00 -5.51E+00Media -5.51E+00 -5.51E+00 -5.51E+00 -5.51E+00Desv. Std. 9.06E-16 1.98E-03 9.06E-16 1.03E-13Peor -5.51E+00 -5.50E+00 -5.51E+00 -5.51E+00Wilcoxon + = +

40 Capítulo 5. Resultados y discusión
Tabla 5.9: Estadísticas del conjunto de pruebas CEC2010 dimensión 10: fun-ciones C01 a C09. En negrita se resaltan los mejores resultados. Para laprueba de Wilcoxon: + es que hay diferencia signi�cativa a favor de CM-ABC-HJ, - en contra y = que no existe diferencia signi�cativa.
CM-ABC-HJ MABC-SF MABC CM-ABC-COM
C01 Factibles 25 25 25 25-7.473E-01 Mejor -7.47E-01 -7.12E-01 -7.47E-01 -7.43E-01
Mediana -7.47E-01 -5.42E-01 -7.47E-01 -6.94E-01Media -7.44E-01 -5.55E-01 -7.47E-01 -6.81E-01Desv. Std. 7.16E-03 9.02E-02 1.01E-05 3.82E-02Peor -7.26E-01 -3.85E-01 -7.47E-01 -6.07E-01Wilcoxon + - +
C02 Factibles 25 13 2 24-2.278E+00 Mejor -2.28E+00 -1.26E+00 1.70E+00 -2.28E+00
Mediana -2.24E+00 -2.40E-01 2.16E+00 -2.25E+00Media -2.25E+00 -9.94E-02 1.93E+00 -2.25E+00Desv. Std. 1.25E-02 7.41E-01 3.28E-01 1.24E-02Peor -2.24E+00 8.89E-01 2.16E+00 -2.24E+00Wilcoxon + + =
C03 Factibles 25 15 0 250.000E+00 Mejor 3.22E-24 2.19E+01 � 1.49E-11
Mediana 4.09E-07 9.48E+12 � 1.94E+00Media 3.40E+00 4.33E+13 � 7.08E+00Desv. Std. 7.80E+00 6.70E+13 � 1.26E+01Peor 2.92E+01 2.13E+14 � 5.81E+01Wilcoxon + + +
C04 Factibles 18 9 0 0-9.992E-06 Mejor 4.78E-06 2.45E-03 � �
Mediana 6.38E-04 4.19E-02 � �Media 1.72E-01 5.25E-02 � �Desv. Std. 3.35E-01 3.57E-02 � �Peor 1.01E+00 1.04E-01 � �Wilcoxon + + +
C05 Factibles 8 4 0 10-4.836E+02 Mejor -4.84E+02 1.43E+02 � -2.61E+02
Mediana -2.47E+02 2.64E+02 � -2.47E+02Media -2.85E+02 2.67E+02 � -2.48E+02Desv. Std. 8.17E+01 1.23E+02 � 4.39E+00Peor -2.47E+02 4.36E+02 � -2.47E+02Wilcoxon + + +
C06 Factibles 25 2 0 0-5.787E+02 Mejor -5.79E+02 4.12E+02 � �
Mediana -5.77E+02 4.54E+02 � �Media -5.68E+02 4.33E+02 � �Desv. Std. 4.71E+01 2.98E+01 � �Peor -3.42E+02 4.54E+02 � �Wilcoxon + + +
C07 Factibles 25 25 25 250.000E+00 Mejor 9.61E-20 8.45E-02 2.38E-02 7.58E-08
Mediana 1.15E-13 1.00E+00 3.26E+00 1.39E+00Media 4.78E-01 3.92E+01 2.71E+00 2.12E+00Desv. Std. 1.32E+00 8.83E+01 1.88E+00 2.77E+00Peor 3.99E+00 3.57E+02 6.45E+00 1.28E+01Wilcoxon + + +
C08 Factibles 25 25 25 250.000E+00 Mejor 2.63E-22 3.52E-02 4.16E-03 1.54E+02
Mediana 3.99E+00 8.40E+02 3.56E-01 2.10E+04Media 1.03E+01 6.31E+06 1.74E+00 1.64E+05Desv. Std. 2.24E+01 3.15E+07 3.11E+00 3.17E+05Peor 1.15E+02 1.58E+08 1.08E+01 1.45E+06Wilcoxon + + +
C09 Factibles 25 2 0 240.000E+00 Mejor 6.69E-26 5.86E+12 � 2.69E-04
Mediana 1.14E-01 7.59E+12 � 2.41E-01Media 3.54E-01 6.72E+12 � 9.50E-01Desv. Std. 8.80E-01 1.23E+12 � 1.60E+00Peor 4.41E+00 7.59E+12 � 4.44E+00Wilcoxon + + +

5.3. Discusión 41
Tabla 5.10: Estadísticas del conjunto de pruebas CEC2010 dimensión 10:funciones C10 a C18. En negrita se resaltan los mejores resultados. Para laprueba de Wilcoxon: + es que hay diferencia signi�cativa a favor de CM-ABC-HJ, - en contra y = que no existe diferencia signi�cativa.
CM-ABC-HJ MABC-SF MABC CM-ABC-COM
C10 Factibles 25 1 0 240.000E+00 Mejor 5.24E-25 1.31E+12 � 6.43E-03
Mediana 6.71E-01 1.31E+12 � 7.24E-01Media 1.15E+00 1.31E+12 � 1.41E+00Desv. Std. 1.52E+00 � � 1.51E+00Peor 5.71E+00 1.31E+12 � 5.43E+00Wilcoxon = + =
C11 Factibles 8 0 0 0-1.523E-03 Mejor -4.83E-04 � � �
Mediana -1.46E-04 � � �Media -1.67E-04 � � �Desv. Std. 2.39E-04 � � �Peor 1.24E-04 � � �Wilcoxon + + +
C12 Factibles 7 10 20 0-5.701E+02 Mejor -5.68E+02 -3.06E+02 -1.92E-01 �
Mediana -1.73E+02 -3.25E-01 -1.11E-01 �Media -2.86E+02 -3.18E+01 4.16E-02 �Desv. Std. 1.93E+02 9.63E+01 3.40E-01 �Peor -1.73E+02 2.77E+00 1.01E+00 �Wilcoxon + + +
C13 Factibles 25 25 25 25-6.843E+01 Mejor -6.84E+01 -6.22E+01 -6.84E+01 -6.10E+01
Mediana -6.84E+01 -5.96E+01 -6.83E+01 -5.77E+01Media -6.79E+01 -5.86E+01 -6.80E+01 -5.69E+01Desv. Std. 1.44E+00 4.40E+00 7.09E-01 2.99E+00Peor -6.35E+01 -4.54E+01 -6.50E+01 -5.01E+01Wilcoxon + - +
C14 Factibles 25 24 25 250.000E+00 Mejor 4.52E+10 1.01E+06 1.09E+09 1.03E+12
Mediana 1.14E+12 5.71E+13 1.38E+10 1.53E+13Media 1.43E+12 6.23E+13 1.80E+10 1.50E+13Desv. Std. 1.12E+12 5.13E+13 1.60E+10 9.44E+12Peor 4.99E+12 2.09E+14 5.50E+10 3.77E+13Wilcoxon - - +
C15 Factibles 25 10 25 250.000E+00 Mejor 1.63E+12 5.70E+13 2.28E+12 4.71E+11
Mediana 1.51E+13 1.57E+14 1.13E+13 3.11E+13Media 1.91E+13 1.52E+14 1.26E+13 3.87E+13Desv. Std. 1.37E+13 6.32E+13 9.15E+12 3.71E+13Peor 5.29E+13 2.39E+14 4.44E+13 1.56E+14Wilcoxon + = -
C16 Factibles 12 6 0 150.000E+00 Mejor 0.00E+00 6.66E-16 � 5.39E-10
Mediana 0.00E+00 2.36E-01 � 1.37E-09Media 4.78E-02 1.77E-01 � 2.28E-09Desv. Std. 1.49E-01 1.90E-01 � 2.14E-09Peor 5.19E-01 4.93E-01 � 8.76E-09Wilcoxon + + +
C17 Factibles 1 8 1 01.463E-17 Mejor 7.19E-01 9.65E-13 3.91E+02 �
Mediana 7.19E-01 3.19E+00 3.91E+02 �Media 7.19E-01 1.78E+01 3.91E+02 �Desv. Std. � 2.92E+01 � �Peor 7.19E-01 6.72E+01 3.91E+02 �Wilcoxon = = +
C18 Factibles 19 17 6 93.731E-20 Mejor 1.34E-28 8.55E-23 2.15E+03 4.86E-06
Mediana 2.08E-21 1.94E-01 8.28E+03 1.50E-05Media 6.01E-19 7.79E+01 7.00E+03 2.61E-05Desv. Std. 2.51E-18 1.86E+02 3.60E+03 2.54E-05Peor 1.09E-17 7.42E+02 1.25E+04 7.90E-05Wilcoxon + + +

42 Capítulo 5. Resultados y discusión
Tabla 5.11: Estadísticas del conjunto de pruebas CEC2010 dimensión 30:funciones C01 a C09. En negrita se resaltan los mejores resultados. Para laprueba de Wilcoxon: + es que hay diferencia signi�cativa a favor de CM-ABC-HJ, - en contra y = que no existe diferencia signi�cativa.
CM-ABC-HJ MABC-SF MABC CM-ABC-COM
C01 Factibles 25 25 25 25-8.218E-01 Mejor -8.20E-01 -6.45E-01 -8.22E-01 -7.56E-01
Mediana -7.93E-01 -4.06E-01 -8.20E-01 -7.02E-01Media -7.94E-01 -4.20E-01 -8.19E-01 -6.91E-01Desv. Std. 1.97E-02 1.27E-01 1.94E-03 4.37E-02Peor -7.54E-01 -1.75E-01 -8.14E-01 -6.09E-01Wilcoxon + - +
C02 Factibles 22 0 10 2-2.169E+00 Mejor -2.16E+00 � 3.72E+00 -2.08E+00
Mediana -1.85E+00 � 4.84E+00 -1.57E+00Media -1.72E+00 � 4.58E+00 -1.82E+00Desv. Std. 3.29E-01 � 4.29E-01 3.57E-01Peor -9.74E-01 � 5.02E+00 -1.57E+00Wilcoxon + + =
C03 Factibles 4 0 0 12.867E+01 Mejor 2.87E+01 � � 2.90E+01
Mediana 2.87E+01 � � 2.90E+01Media 2.87E+01 � � 2.90E+01Desv. Std. 2.19E-05 � � �Peor 2.87E+01 � � 2.90E+01Wilcoxon + + =
C04 Factibles 0 0 0 04.698E-03 Mejor � � � �
Mediana � � � �Media � � � �Desv. Std. � � � �Peor � � � �Wilcoxon
C05 Factibles 0 1 0 0-4.531E+02 Mejor � 5.22E+02 � �
Mediana � 5.22E+02 � �Media � 5.22E+02 � �Desv. Std. � � � �Peor � 5.22E+02 � �Wilcoxon -
C06 Factibles 0 0 0 0-5.286E+02 Mejor � � � �
Mediana � � � �Media � � � �Desv. Std. � � � �Peor � � � �Wilcoxon
C07 Factibles 25 25 25 251.147E-15 Mejor 5.46E-05 1.34E-02 1.79E+01 1.50E+01
Mediana 1.32E+01 1.71E+02 2.31E+01 8.25E+01Media 1.89E+01 2.45E+09 2.33E+01 1.16E+02Desv. Std. 2.10E+01 6.62E+09 2.12E+00 1.14E+02Peor 7.73E+01 2.84E+10 2.79E+01 4.49E+02Wilcoxon + + +
C08 Factibles 25 25 25 252.519E-14 Mejor 3.93E+00 1.54E+02 2.31E+01 3.03E+07
Mediana 1.28E+02 1.61E+08 2.41E+01 7.33E+07Media 4.38E+02 7.04E+09 2.44E+01 8.84E+07Desv. Std. 7.68E+02 1.48E+10 1.31E+00 5.60E+07Peor 2.98E+03 5.82E+10 2.86E+01 2.71E+08Wilcoxon + + +
C09 Factibles 25 1 1 192.771E-16 Mejor 3.06E+00 4.35E+13 2.40E+13 8.28E+00
Mediana 1.25E+02 4.35E+13 2.40E+13 5.82E+01Media 9.84E+02 4.35E+13 2.40E+13 1.36E+02Desv. Std. 2.13E+03 � � 1.72E+02Peor 8.60E+03 4.35E+13 2.40E+13 6.43E+02Wilcoxon = = =
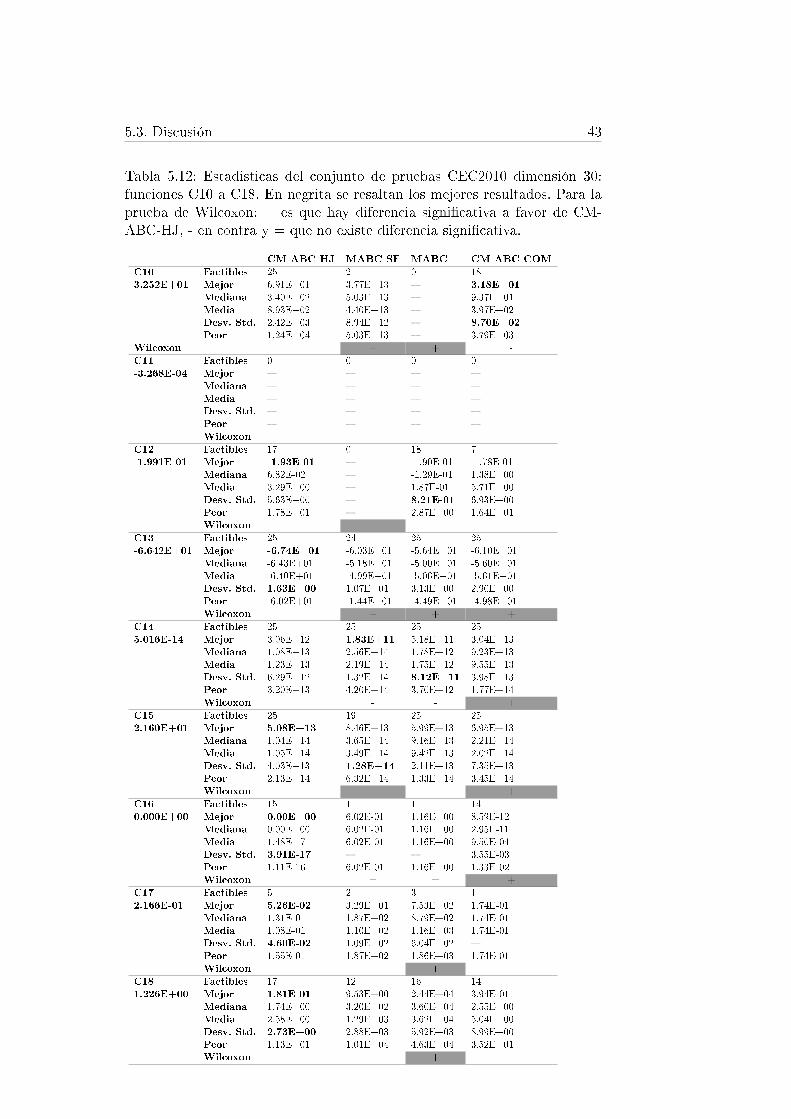
5.3. Discusión 43
Tabla 5.12: Estadisticas del conjunto de pruebas CEC2010 dimensión 30:funciones C10 a C18. En negrita se resaltan los mejores resultados. Para laprueba de Wilcoxon: + es que hay diferencia signi�cativa a favor de CM-ABC-HJ, - en contra y = que no existe diferencia signi�cativa.
CM-ABC-HJ MABC-SF MABC CM-ABC-COM
C10 Factibles 25 2 0 183.252E+01 Mejor 6.91E+01 3.77E+13 � 3.18E+01
Mediana 3.40E+02 5.03E+13 � 9.37E+01Media 8.93E+02 4.40E+13 � 3.97E+02Desv. Std. 2.42E+03 8.94E+12 � 8.70E+02Peor 1.24E+04 5.03E+13 � 3.79E+03
Wilcoxon + + -C11 Factibles 0 0 0 0-3.268E-04 Mejor � � � �
Mediana � � � �Media � � � �Desv. Std. � � � �Peor � � � �Wilcoxon
C12 Factibles 17 0 18 7-1.991E-01 Mejor -1.93E-01 � -1.90E-01 -1.78E-01
Mediana 6.82E-02 � -1.29E-01 1.38E+00Media 3.29E+00 � 1.87E-01 5.71E+00Desv. Std. 5.63E+00 � 8.21E-01 6.93E+00Peor 1.78E+01 � 2.87E+00 1.64E+01Wilcoxon + = =
C13 Factibles 25 24 25 25-6.642E+01 Mejor -6.74E+01 -6.03E+01 -5.64E+01 -6.10E+01
Mediana -6.43E+01 -5.18E+01 -5.00E+01 -5.60E+01Media -6.40E+01 -4.99E+01 -5.06E+01 -5.61E+01Desv. Std. 1.63E+00 1.07E+01 3.13E+00 2.90E+00Peor -6.02E+01 -1.44E+01 -4.49E+01 -4.98E+01Wilcoxon + + +
C14 Factibles 25 25 25 255.016E-14 Mejor 3.06E+12 1.83E+11 5.18E+11 3.04E+13
Mediana 1.08E+13 2.56E+14 1.78E+12 9.23E+13Media 1.23E+13 2.19E+14 1.75E+12 9.55E+13Desv. Std. 6.29E+12 1.32E+14 8.12E+11 3.98E+13Peor 3.20E+13 4.20E+14 3.70E+12 1.77E+14Wilcoxon - - +
C15 Factibles 25 19 25 252.160E+01 Mejor 5.08E+13 8.46E+13 5.99E+13 6.95E+13
Mediana 1.04E+14 3.65E+14 9.16E+13 2.21E+14Media 1.05E+14 3.49E+14 9.42E+13 2.02E+14Desv. Std. 4.03E+13 1.28E+14 2.11E+13 7.35E+13Peor 2.13E+14 6.32E+14 1.33E+14 3.45E+14Wilcoxon + = +
C16 Factibles 15 1 1 140.000E+00 Mejor 0.00E+00 6.02E-01 1.16E+00 8.59E-12
Mediana 0.00E+00 6.02E-01 1.16E+00 2.95E-11Media 1.48E-17 6.02E-01 1.16E+00 9.50E-04Desv. Std. 3.91E-17 � � 3.55E-03Peor 1.11E-16 6.02E-01 1.16E+00 1.33E-02Wilcoxon = = +
C17 Factibles 5 2 3 12.166E-01 Mejor 5.26E-02 3.29E+01 7.53E+02 1.74E-01
Mediana 1.31E-01 1.87E+02 8.79E+02 1.74E-01Media 1.08E-01 1.10E+02 1.16E+03 1.74E-01Desv. Std. 4.60E-02 1.09E+02 6.04E+02 �Peor 1.55E-01 1.87E+02 1.86E+03 1.74E-01Wilcoxon = + =
C18 Factibles 17 12 16 141.226E+00 Mejor 1.81E-01 9.53E+00 2.44E+04 3.94E-01
Mediana 1.74E+00 3.20E+02 3.60E+04 2.55E+00Media 2.58E+00 1.29E+03 3.62E+04 5.04E+00Desv. Std. 2.73E+00 2.88E+03 5.92E+03 8.99E+00Peor 1.13E+01 1.01E+04 4.63E+04 3.52E+01Wilcoxon + + =


Capítulo 6
Conclusiones y trabajo futuro
A continuación se presentan las conclusiones a las que se llegaron aparirdel experimento y resultados obtenidos, además de el trabajo futuro que sederiva de esta investigación.
6.1. Conclusiones
De acuerdo a los resultados obtenidos por los algoritmos propuestos y ex-puestos en el capítulo anterior, podemos concluir que la hipótesis propuestade este trabajo es validada, pues la combinación del algoritmo ABC con bus-cadores locales nos pueden proveer de resultados competitivos. Sin embargoincluir el buscador local implica un proceso de diseño, para que el resultadosea el deseado, si no, puede ser que se obtenga el efecto contrario. Aunqueambos buscadores locales se desempeñaron mejor que las versiones sin és-tos, hay que destacar que el método de Hooke-Jeeves logro obtener mejoresresultados sobre el método Complex.
El rendimiento del algoritmo CMABC sobre las funciones del CEC2006,fue satisfactoria, solamente en las funciones G20, G21 y G22 no se obtuvieronresultados factibles. De acuerdo a las características de estas funciones, sepuede concluir que la zona factible es muy pequeña y que las restriccionesno lineales de igualdad presentan un problema tanto para el algoritmo ABCcomo para los buscadores locales.
Respecto al conjunto de funciones del CEC2010, el algoritmo CMABCpresentó mejor rendimiento que sus similares MABC y MABCSF. El algo-ritmo presenta di�cultades en problemas donde la dimensionalidad es altay los rangos de las variables son muy amplios (como en el benchmark delCEC'2010), ya que en dimensión 10 el rendimiento es mejor que en dimen-sión 30. Las funciones C14 y C15 son interesantes, ya que aunque su áreafactible es grande y rápida de alcanzar, los algoritmo no logran convergeral optimo reportado por Takahama [33]. Podemos concluir que al ser no se-parables estas funciones, los buscadores locales (en que su funcionamiento
45

46 Capítulo 6. Conclusiones y trabajo futuro
exploran por dimensión) no logran el desempeño deseado.Las modi�caciones respecto al operador de abejas empleadas y la relación
entre el número de empleadas y observadoras, fueron realizadas para dismi-nuir la rápida convergencia, ya que agregar el buscador local la aceleraría.Dadas las grá�cas mostradas en las Figuras 5.1,5.2 y 5.3 podemos concluirque se logró disminuir la convergencia prematura.
6.2. Trabajo futuro
Si algo destaca a la ciencia es que esta no se detiene, es por esto quederivada de esta investigación se observan el siguiente trabajo futuro.
Probar otros algoritmos de búsqueda local (Powell, Hill-climbing) juntocon el algoritmo ABC.
Explorar otros diseños como lo puede ser el efecto Baldwin, la incor-poración de la búsqueda local en los operadores de las abejas, entreotros.
En el algoritmo propuesto se varió la relación entre el número de abejasempleadas con el número de abejas observadoras, buscando reducir laconvergencia, se propone estudiar el comportamiento de este parámetrodentro del algoritmo memético.
Parte I
Apéndices


Apéndice A
Apéndice
A.1. Pruebas de Wilcoxon
49

50 Apéndice A. Apéndice
Tabla A.1: Prueba de Wilcoxon para el CEC2006. El número 1 indica quehay diferencia signi�cativa, el 0 que no la hay y �-� es que no hubo solucionesfactibles. A0 es MABC-SF, A1 es MABC, A2 es CMABC-HJ, A3 es CMABC-COM
G01 A1 A2 A3 G09 A1 A2 A3 G17 A1 A2 A3A0 1 1 1 A0 1 1 1 A0 0 1 1A1 0 0 A1 1 1 A1 1 1A2 0 A2 0 A2 0G02 A1 A2 A3 G10 A1 A2 A3 G18 A1 A2 A3A0 1 1 1 A0 1 1 1 A0 1 1 1A1 1 1 A1 1 1 A1 1 1A2 1 A2 1 A2 1G03 A1 A2 A3 G11 A1 A2 A3 G19 A1 A2 A3A0 1 1 1 A0 1 1 1 A0 1 1 1A1 1 1 A1 1 1 A1 1 1A2 1 A2 0 A2 1G04 A1 A2 A3 G12 A1 A2 A3 G20 A1 A2 A3A0 1 1 1 A0 1 1 0 A0 - - -A1 0 0 A1 0 1 A1 - -A2 0 A2 1 A2 -G05 A1 A2 A3 G13 A1 A2 A3 G21 A1 A2 A3A0 1 1 1 A0 0 1 1 A0 - - -A1 1 1 A1 1 1 A1 - -A2 0 A2 1 A2 -G06 A1 A2 A3 G14 A1 A2 A3 G22 A1 A2 A3A0 1 1 1 A0 - 1 1 A0 - - -A1 0 1 A1 - - A1 - -A2 1 A2 1 A2 -G07 A1 A2 A3 G15 A1 A2 A3 G23 A1 A2 A3A0 1 1 1 A0 1 1 1 A0 - 0 0A1 1 1 A1 1 1 A1 - -A2 1 A2 0 A2 0G08 A1 A2 A3 G16 A1 A2 A3 G24 A1 A2 A3A0 1 1 1 A0 1 1 1 A0 1 1 1A1 0 0 A1 1 0 A1 0 1A2 0 A2 0 A2 1

A.1. Pruebas de Wilcoxon 51
Tabla A.2: Prueba de Wilcoxon para el CEC2010 dimensión 10. El número 1indica que hay diferencia signi�cativa, el 0 que no la hay y �-� es que no hubosoluciones factibles. A0 es MABC-SF, A1 es MABC, A2 es CMABC-HJ, A3es CMABC-COM
C01 A1 A2 A3 C07 A1 A2 A3 C13 A1 A2 A3A0 1 1 1 A0 0 1 0 A0 1 1 1A1 1 1 A1 1 1 A1 1 1A2 1 A2 1 A2 1C02 A1 A2 A3 C08 A1 A2 A3 C14 A1 A2 A3A0 1 1 1 A0 1 1 1 A0 1 1 1A1 1 1 A1 1 1 A1 1 1A2 0 A2 1 A2 1C03 A1 A2 A3 C09 A1 A2 A3 C15 A1 A2 A3A0 - 1 1 A0 - 1 1 A0 1 1 1A1 - - A1 - - A1 0 1A2 1 A2 1 A2 1C04 A1 A2 A3 C10 A1 A2 A3 C16 A1 A2 A3A0 - 1 - A0 - 0 0 A0 - 1 1A1 - - A1 - - A1 - -A2 - A2 0 A2 1C05 A1 A2 A3 C11 A1 A2 A3 C17 A1 A2 A3A0 - 1 1 A0 - - - A0 0 0 -A1 - - A1 - - A1 0 -A2 1 A2 - A2 -C06 A1 A2 A3 C12 A1 A2 A3 C18 A1 A2 A3A0 - 1 - A0 1 1 - A0 1 1 0A1 - - A1 1 - A1 1 1A2 - A2 - A2 1

52 Apéndice A. Apéndice
Tabla A.3: Prueba de Wilcoxon para el CEC2010 dimensión 30. El número 1indica que hay diferencia signi�cativa, el 0 que no la hay y �-� es que no hubosoluciones factibles. A0 es MABC-SF, A1 es MABC, A2 es CMABC-HJ-T,A3 es CMABC
C01 A1 A2 A3 C07 A1 A2 A3 C13 A1 A2 A3A0 1 1 1 A0 0 1 0 A0 0 1 1A1 1 1 A1 1 1 A1 1 1A2 1 A2 1 A2 1C02 A1 A2 A3 C08 A1 A2 A3 C14 A1 A2 A3A0 - - - A0 1 1 0 A0 1 1 1A1 1 1 A1 1 1 A1 1 1A2 0 A2 1 A2 1C03 A1 A2 A3 C09 A1 A2 A3 C15 A1 A2 A3A0 - - - A0 0 0 0 A0 1 1 1A1 - - A1 0 0 A1 0 1A2 0 A2 0 A2 1C04 A1 A2 A3 C10 A1 A2 A3 C16 A1 A2 A3A0 - - - A0 - 1 1 A0 0 0 0A1 - - A1 - - A1 0 0A2 - A2 1 A2 1C05 A1 A2 A3 C11 A1 A2 A3 C17 A1 A2 A3A0 - - - A0 - - - A0 0 0 0A1 - - A1 - - A1 1 0A2 - A2 - A2 0C06 A1 A2 A3 C12 A1 A2 A3 C18 A1 A2 A3A0 - - - A0 - - - A0 1 1 1A1 - - A1 0 1 A1 1 1A2 - A2 0 A2 0

Apéndice B
Apéndice
Resumen: A continuación se presentan las grá�cas de convergencia
para cada una de las funciones. Estas grá�cas corresponden a la ejecu-
ción con el valor de mediana en los resultados.
B.1. Grá�cas de convergencia CEC2006
Figura B.1: Grá�ca de convergencia de la función G01
53

54 Apéndice B. Apéndice
Figura B.2: Grá�ca de convergencia de la función G02

B.1. Grá�cas de convergencia CEC2006 55
Figura B.3: Grá�ca de convergencia de la función G03
Figura B.4: Grá�ca de convergencia de la función G04

56 Apéndice B. Apéndice
Figura B.5: Grá�ca de convergencia de la función G05
Figura B.6: Grá�ca de convergencia de la función G06

B.1. Grá�cas de convergencia CEC2006 57
Figura B.7: Grá�ca de convergencia de la función G07
Figura B.8: Grá�ca de convergencia de la función G08

58 Apéndice B. Apéndice
Figura B.9: Grá�ca de convergencia de la función G09
Figura B.10: Grá�ca de convergencia de la función G11

B.1. Grá�cas de convergencia CEC2006 59
Figura B.11: Grá�ca de convergencia de la función G02
Figura B.12: Grá�ca de convergencia de la función G12

60 Apéndice B. Apéndice
Figura B.13: Grá�ca de convergencia de la función G13
Figura B.14: Grá�ca de convergencia de la función G14

B.1. Grá�cas de convergencia CEC2006 61
Figura B.15: Grá�ca de convergencia de la función G15
Figura B.16: Grá�ca de convergencia de la función G16
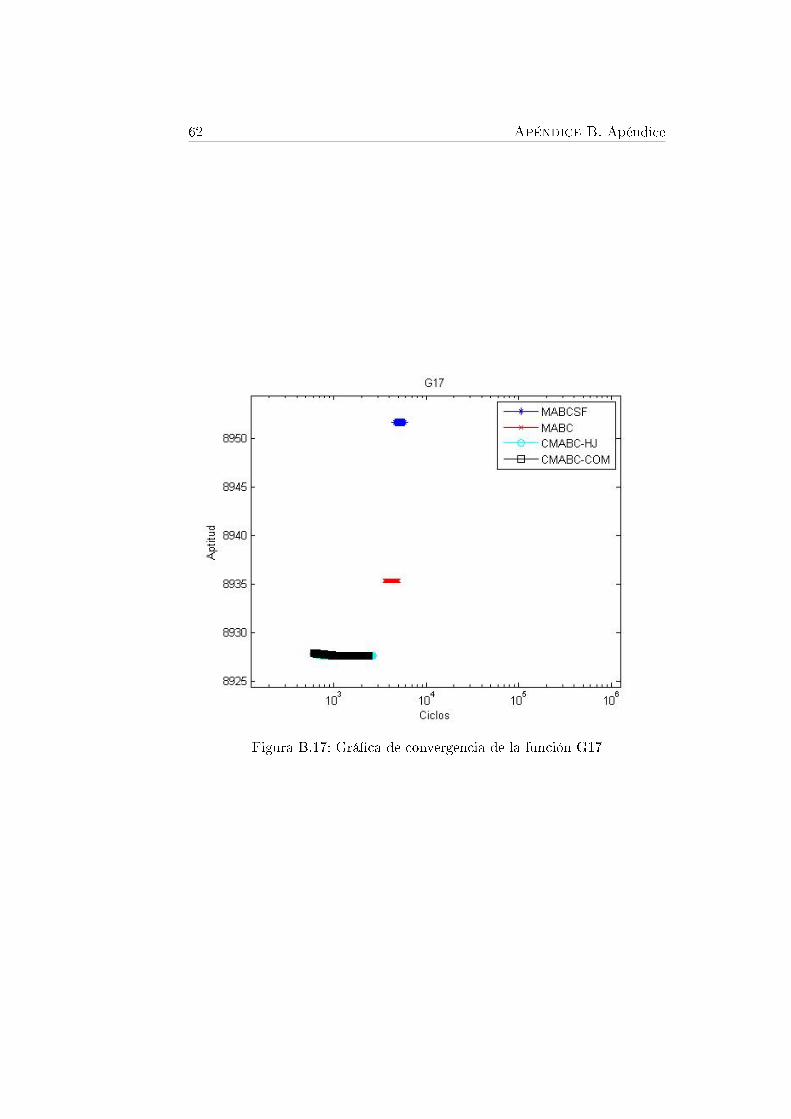
62 Apéndice B. Apéndice
Figura B.17: Grá�ca de convergencia de la función G17

B.1. Grá�cas de convergencia CEC2006 63
Figura B.18: Grá�ca de convergencia de la función G18

64 Apéndice B. Apéndice
Figura B.19: Grá�ca de convergencia de la función G19
Figura B.20: Grá�ca de convergencia de la función G23

B.1. Grá�cas de convergencia CEC2006 65
Figura B.21: Grá�ca de convergencia de la función G24

66 Apéndice B. Apéndice
B.2. Grá�cas de convergencia CEC2010 dimensión10
Figura B.22: Grá�ca de convergencia de la función C01

B.2. Grá�cas de convergencia CEC2010 dimensión 10 67
Figura B.23: Grá�ca de convergencia de la función C02
Figura B.24: Grá�ca de convergencia de la función C03

68 Apéndice B. Apéndice
Figura B.25: Grá�ca de convergencia de la función C04
Figura B.26: Grá�ca de convergencia de la función C05

B.2. Grá�cas de convergencia CEC2010 dimensión 10 69
Figura B.27: Grá�ca de convergencia de la función C06
Figura B.28: Grá�ca de convergencia de la función C07

70 Apéndice B. Apéndice
Figura B.29: Grá�ca de convergencia de la función C08
Figura B.30: Grá�ca de convergencia de la función C09

B.2. Grá�cas de convergencia CEC2010 dimensión 10 71
Figura B.31: Grá�ca de convergencia de la función C10
Figura B.32: Grá�ca de convergencia de la función C11

72 Apéndice B. Apéndice
Figura B.33: Grá�ca de convergencia de la función C12
Figura B.34: Grá�ca de convergencia de la función C13

B.2. Grá�cas de convergencia CEC2010 dimensión 10 73
Figura B.35: Grá�ca de convergencia de la función C14
Figura B.36: Grá�ca de convergencia de la función C15

74 Apéndice B. Apéndice
Figura B.37: Grá�ca de convergencia de la función C16
Figura B.38: Grá�ca de convergencia de la función C17
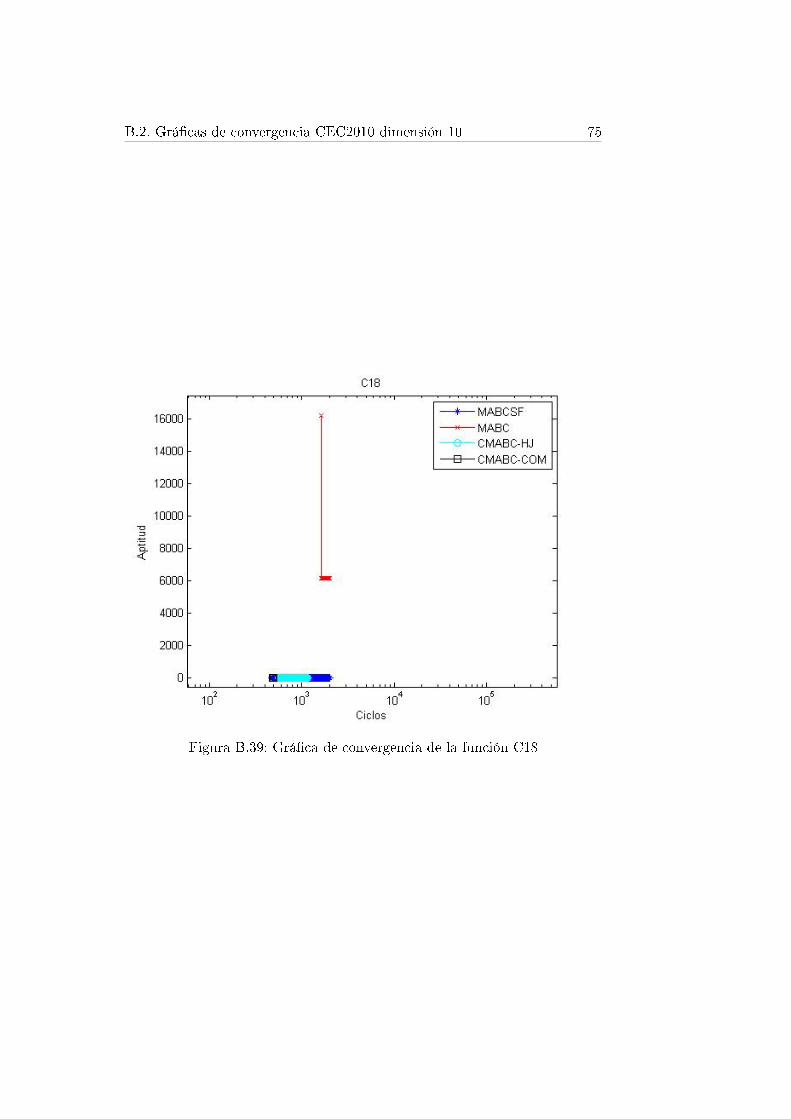
B.2. Grá�cas de convergencia CEC2010 dimensión 10 75
Figura B.39: Grá�ca de convergencia de la función C18

76 Apéndice B. Apéndice
B.3. Grá�cas de convergencia CEC2010 dimensión30
Figura B.40: Grá�ca de convergencia de la función C01

B.3. Grá�cas de convergencia CEC2010 dimensión 30 77
Figura B.41: Grá�ca de convergencia de la función C02
Figura B.42: Grá�ca de convergencia de la función C03

78 Apéndice B. Apéndice
Figura B.43: Grá�ca de convergencia de la función C07
Figura B.44: Grá�ca de convergencia de la función C08

B.3. Grá�cas de convergencia CEC2010 dimensión 30 79
Figura B.45: Grá�ca de convergencia de la función C09
Figura B.46: Grá�ca de convergencia de la función C10
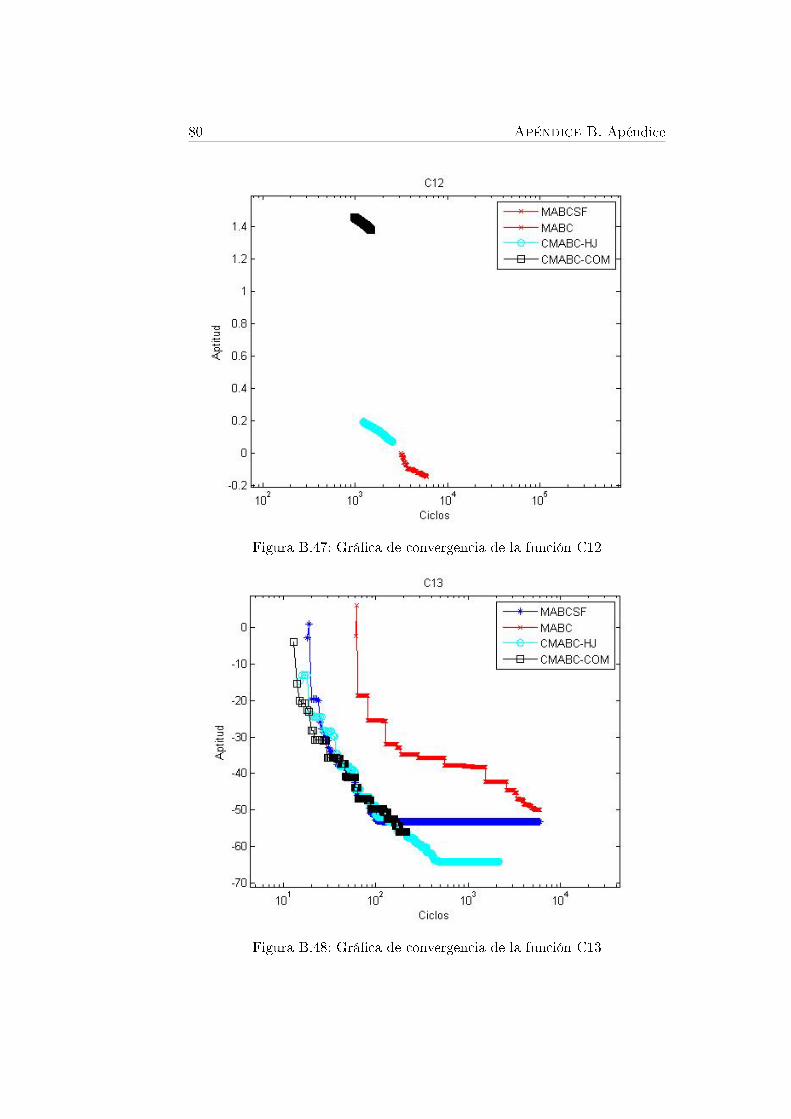
80 Apéndice B. Apéndice
Figura B.47: Grá�ca de convergencia de la función C12
Figura B.48: Grá�ca de convergencia de la función C13

B.3. Grá�cas de convergencia CEC2010 dimensión 30 81
Figura B.49: Grá�ca de convergencia de la función C14
Figura B.50: Grá�ca de convergencia de la función C15

82 Apéndice B. Apéndice
Figura B.51: Grá�ca de convergencia de la función C16
Figura B.52: Grá�ca de convergencia de la función C17
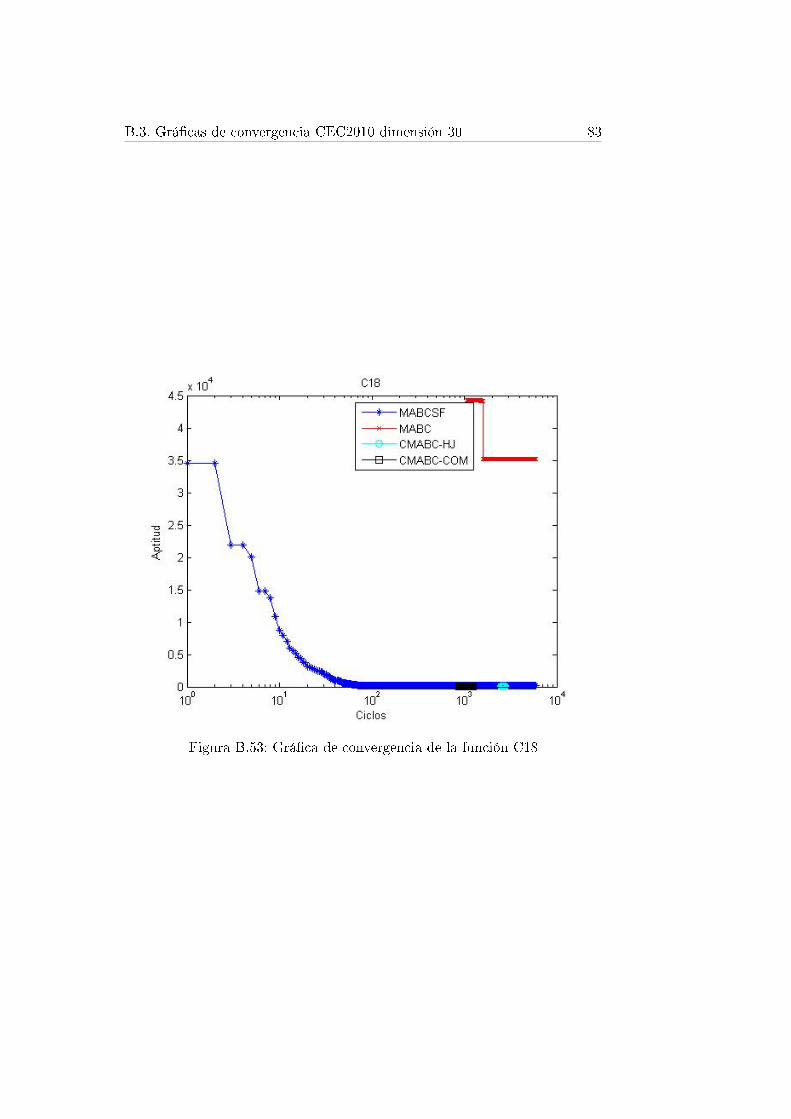
B.3. Grá�cas de convergencia CEC2010 dimensión 30 83
Figura B.53: Grá�ca de convergencia de la función C18


Apéndice C
Apéndice
C.1. Detalle de las funciones del CEC2006
The details of the 24 test problems utilized in this work are the following:g01
Minimize:
f(~x) = 5
4∑i=1
xi − 5
4∑i=1
x2i −13∑i=5
xi (C.1)
Subject to:
g1(~x) = 2x1 + 2x2 + x10 + x11 − 10 ≤ 0g2(~x) = 2x1 + 2x3 + x10 + x12 − 10 ≤ 0g3(~x) = 2x2 + 2x3 + x11 + x12 − 10 ≤ 0g4(~x) = −8x1 + x10 ≤ 0g5(~x) = −8x2 + x11 ≤ 0g6(~x) = −8x3 + x12 ≤ 0g7(~x) = −2x4 − x5 + x10 ≤ 0g8(~x) = −2x6 − x7 + x11 ≤ 0g9(~x) = −2x8 − x9 + x12 ≤ 0
where 0 ≤ xi ≤ 1 (i = 1, . . . , 9), 0 ≤ xi ≤ 100 (i = 10, 11, 12), and 0 ≤ x13 ≤ 1. The feasibleglobal optimum is located at x∗ = (1, 1, 1, 1, 1, 1, 1, 1, 1, 3, 3, 3, 1) where f(x∗) = -15. whereg1, g2, g3, g7, g8 g9 are active constraints.
g02
Minimize:
f(~x) = −
∣∣∣∣∣∑n
i=1cos4(xi)− 2
∏n
i=1cos2(xi)√∑n
i=1ix2i
∣∣∣∣∣ (C.2)
Subject to:
g1(~x) = 0.75−∏n
i=1xi ≤ 0
g2(~x) =∑n
i=1xi − 7.5n ≤ 0
85
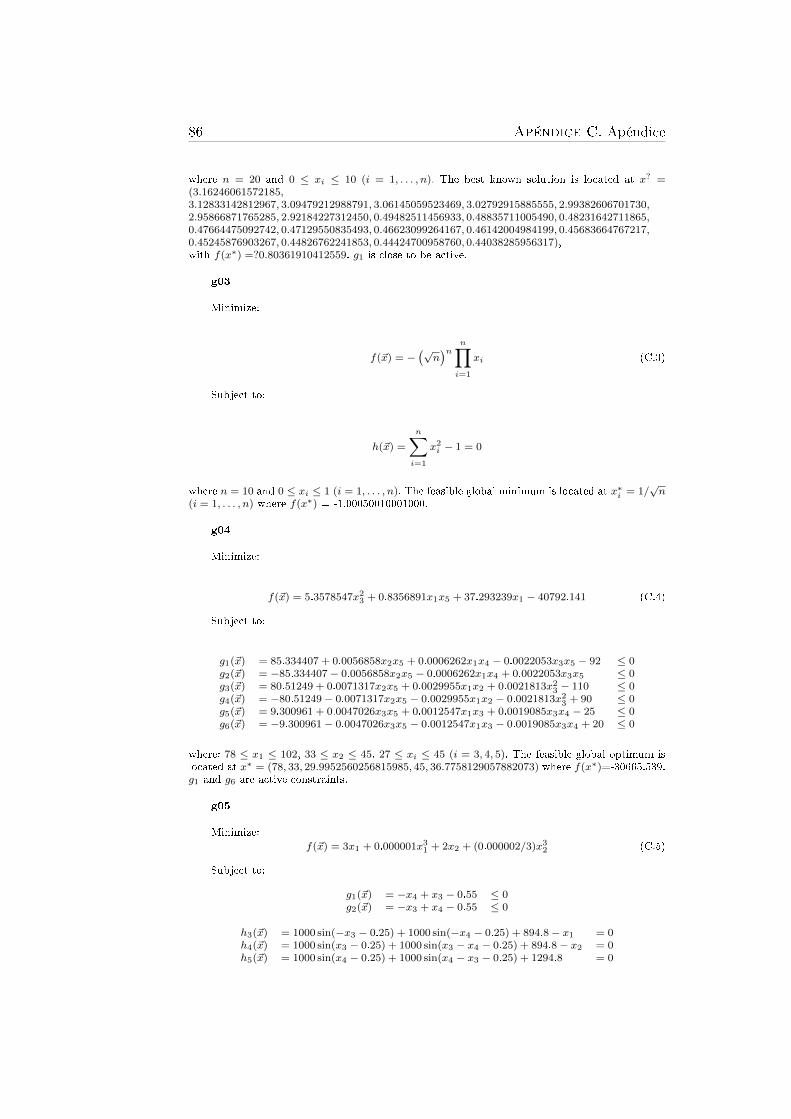
86 Apéndice C. Apéndice
where n = 20 and 0 ≤ xi ≤ 10 (i = 1, . . . , n). The best known solution is located at x? =(3.16246061572185,3.12833142812967, 3.09479212988791, 3.06145059523469, 3.02792915885555, 2.99382606701730,2.95866871765285, 2.92184227312450, 0.49482511456933, 0.48835711005490, 0.48231642711865,0.47664475092742, 0.47129550835493, 0.46623099264167, 0.46142004984199, 0.45683664767217,0.45245876903267, 0.44826762241853, 0.44424700958760, 0.44038285956317),with f(x∗) =?0.80361910412559. g1 is close to be active.
g03
Minimize:
f(~x) = −(√
n)n n∏
i=1
xi (C.3)
Subject to:
h(~x) =
n∑i=1
x2i − 1 = 0
where n = 10 and 0 ≤ xi ≤ 1 (i = 1, . . . , n). The feasible global minimum is located at x∗i = 1/√n
(i = 1, . . . , n) where f(x∗) = -1.00050010001000.
g04
Minimize:
f(~x) = 5.3578547x23 + 0.8356891x1x5 + 37.293239x1 − 40792.141 (C.4)
Subject to:
g1(~x) = 85.334407 + 0.0056858x2x5 + 0.0006262x1x4 − 0.0022053x3x5 − 92 ≤ 0g2(~x) = −85.334407− 0.0056858x2x5 − 0.0006262x1x4 + 0.0022053x3x5 ≤ 0g3(~x) = 80.51249 + 0.0071317x2x5 + 0.0029955x1x2 + 0.0021813x23 − 110 ≤ 0g4(~x) = −80.51249− 0.0071317x2x5 − 0.0029955x1x2 − 0.0021813x23 + 90 ≤ 0g5(~x) = 9.300961 + 0.0047026x3x5 + 0.0012547x1x3 + 0.0019085x3x4 − 25 ≤ 0g6(~x) = −9.300961− 0.0047026x3x5 − 0.0012547x1x3 − 0.0019085x3x4 + 20 ≤ 0
where: 78 ≤ x1 ≤ 102, 33 ≤ x2 ≤ 45, 27 ≤ xi ≤ 45 (i = 3, 4, 5). The feasible global optimum islocated at x∗ = (78, 33, 29.9952560256815985, 45, 36.7758129057882073) where f(x∗)=-30665.539.g1 and g6 are active constraints.
g05
Minimize:
f(~x) = 3x1 + 0.000001x31 + 2x2 + (0.000002/3)x32 (C.5)
Subject to:
g1(~x) = −x4 + x3 − 0.55 ≤ 0g2(~x) = −x3 + x4 − 0.55 ≤ 0
h3(~x) = 1000 sin(−x3 − 0.25) + 1000 sin(−x4 − 0.25) + 894.8− x1 = 0h4(~x) = 1000 sin(x3 − 0.25) + 1000 sin(x3 − x4 − 0.25) + 894.8− x2 = 0h5(~x) = 1000 sin(x4 − 0.25) + 1000 sin(x4 − x3 − 0.25) + 1294.8 = 0

C.1. Detalle de las funciones del CEC2006 87
where 0 ≤ x1 ≤ 1200, 0 ≤ x2 ≤ 1200, −0.55 ≤ x3 ≤ 0.55, and −0.55 ≤ x4 ≤ 0.55. The best knownsolution is located at: x∗=(679.945148297028709, 1026.06697600004691, 0.118876369094410433,−0.396233485215178266) where f(x∗) = 5126.4967140071.
g06
Minimize:f(~x) = (x1 − 10)3 + (x2 − 20)3 (C.6)
Subject to:
g1(~x) = −(x1 − 5)2 − (x2 − 5)2 + 100 ≤ 0g2(~x) = (x1 − 6)2 + (x2 − 5)2 − 82.81 ≤ 0
where 13 ≤ x1 ≤ 100 and 0 ≤ x2 ≤ 100. The feasible global optimum is located at:x∗ = (14.09500000000000064, 0.8429607892154795668) where f(x∗) = −6961.81387558015. Bothconstraints are active.
g07
Minimize:
f(~x) = x21 + x22 + x1x2 − 14x1 − 16x2 + (x3 − 10)2 + 4(x4 − 5)2 + (x5 − 3)2+2(x6 − 1)2 + 5x27 + 7(x8 − 11)2 + 2(x9 − 10)2 + (x10 − 7)2 + 45
(C.7)
Subject to:
g1(~x) = −105 + 4x1 + 5x2 − 3x7 + 9x8 ≤ 0g2(~x) = 10x1 − 8x2 − 17x7 + 2x8 ≤ 0g3(~x) = −8x1 + 2x2 + 5x9 − 2x10 − 12 ≤ 0g4(~x) = 3(x1 − 2)2 + 4(x2 − 3)2 + 2x23 − 7x4 − 120 ≤ 0g5(~x) = 5x21 + 8x2 + (x3 − 6)2 − 2x4 − 40 ≤ 0g6(~x) = x21 + 2(x2 − 2)2 − 2x1x2 + 14x5 − 6x6 ≤ 0g7(~x) = 0.5(x1 − 8)2 + 2(x2 − 4)2 + 3x25 − x6 − 30 ≤ 0g8(~x) = −3x1 + 6x2 + 12(x9 − 8)2 − 7x10 ≤ 0
where−10 ≤ xi ≤ 10 (i = 1, . . . , 10). The feasible global optimum is located at x∗ = (2.17199634142692,2.3636830416034, 8.77392573913157, 5.09598443745173, 0.990654756560493, 1.43057392853463,1.32164415364306, 9.82872576524495, 8.2800915887356, 8.3759266477347) wheref(x∗) = 24.30620906818. g1, g2, g3, g4, g5, and g6 are active constraints.
g08
Minimize:
f(~x) = −sin3(2πx1) sin(2πx2)
x31(x1 + x2)(C.8)
Subject to:
g1(~x) = x21 − x2 + 1 ≤ 0g2(~x) = 1− x1 + (x2 − 4)2 ≤ 0
where 0 ≤ x1 ≤ 10 and 0 ≤ x2 ≤ 10. The feasible global optimum is located at: x∗ =(1.22797135260752599,4.24537336612274885) with f(x∗) = −0.0958250414180359.

88 Apéndice C. Apéndice
g09
Minimize:
f(~x) = (x1−10)2 + 5(x2−12)2 +x43 + 3(x4−11)2 + 10x65 + 7x26 +x47−4x6x7−10x6−8x7 (C.9)
Subject to:
g1(~x) = −127 + 2x21 + 3x42 + x3 + 4x24 + 5x5 ≤ 0g2(~x) = −282 + 7x1 + 3x2 + 10x23 + x4 − x5 ≤ 0g3(~x) = −196 + 23x1 + x22 + 6x26 − 8x7 ≤ 0g4(~x) = 4x21 + x22 − 3x1x2 + 2x23 + 5x6 − 11x7 ≤ 0
where−10 ≤ xi ≤ 10 (i = 1, . . . , 7). The feasible global optimum is located at:x∗=(2.33049935147405174,1.95137236847114592, −0.477541399510615805, 4.36572624923625874, −0.624486959100388983,1.03813099410962173, 1.5942266780671519) with f(x∗) = 680.630057374402. g1 and g4 are activeconstraints.
g10
Minimize:
f(~x) = x1 + x2 + x3 (C.10)
Subject to:
g1(~x) = −1 + 0.0025(x4 + x6) ≤ 0g2(~x) = −1 + 0.0025(x5 + x7 − x4) ≤ 0g3(~x) = −1 + 0.01(x8 − x5) ≤ 0g4(~x) = −x1x6 + 833.33252x4 + 100x1 − 83333.333 ≤ 0g5(~x) = −x2x7 + 1250x5 + x2x4 − 1250x4 ≤ 0g6(~x) = −x3x8 + 1250000 + x3x5 − 2500x5 ≤ 0
where 100 ≤ x1 ≤ 10000, 1000 ≤ xi ≤ 10000, (i = 2, 3), 10 ≤ xi ≤ 1000, (i = 4, . . . , 8). The feasi-ble global optimum is located at x∗ = (579.306685017979589, 1359.97067807935605, 5109.97065743133317,182.01769963061534, 295.601173702746792, 217.982300369384632, 286.41652592786852,395.601173702746735) with f(x∗) = 7049.24802052867. g1, g2, and g3 are active constraints.
g11
Minimize:
f(~x) = x21 + (x2 − 1)2 (C.11)
Subject to:
h(~x) = x2 − x21 = 0
where: −1 ≤ x1 ≤ 1, −1 ≤ x2 ≤ 1. The feasible global optimum is located at:x∗ = (±1/√
2, 1/2)with f(x∗) = 0.7499.
g12
Minimize:
f(~x) = −100− (x1 − 5)2 − (x2 − 5)2 − (x3 − 5)2
100(C.12)
Subject to:

C.1. Detalle de las funciones del CEC2006 89
g1(~x) = (x1 − p)2 + (x2 − q)2 + (x3 − r)2 − 0.0625 ≤ 0
where 0 ≤ xi ≤ 10 (i = 1, 2, 3) and p, q, r = 1, 2, . . . , 9. The feasible region consists on 93 disjointspheres. A point (x1, x2, x3) is feasible if and only if there exist p, q, r such that the above inequa-lity holds. The feasible global optimum is located at x∗ = (5, 5, 5) with f(x∗) = −1.

90 Apéndice C. Apéndice
g13
Minimize:
f(~x) = ex1x2x3x4 (C.13)
Subject to:
h1(~x) = x21 + x22 + x23 + x24 + x25 − 10 = 0h2(~x) = x2x3 − 5x4x5 = 0h3(~x) = x31 + x32 + 1 = 0
where −2.3 ≤ xi ≤ 2.3 (i = 1, 2) and −3.2 ≤ xi ≤ 3.2 (1 = 3, 4, 5). The feasible global optimum isat ~x∗ = (−1.71714224003, 1.59572124049468, 1.8272502406271,−0.763659881912867,−0.76365986736498)with f( ~x∗) = 0.053941514041898.
g14
Minimize:
f(~x) =
10∑i=1
xi
(ci + ln
xi∑10
j=1xj
)(C.14)
Subject to:
h1(~x) = x1 + 2x2 + 2x3 + x6 + x10 − 2 = 0h2(~x) = x4 + 2x5 + x6 + x7 − 1 = 0h3(~x) = x3 + x7 + x8 + 2x9 + x10 − 1 = 0
where 0 < xi ≤ 10 (i = 1, ..., 10), and c1 = -6.089, c2 = -17.164, c3 = -34.054, c4 = -5.914,c5 = -24.721, c6 = -14.986, c9 = -26.662, c10 = -22.179. The best known solution is at x∗ =(0.0406684113216282,0.147721240492452, 0.783205732104114, 0.00141433931889084, 0.485293636780388, 0.000693183051556082,0.0274052040687766, 0.0179509660214818, 0.0373268186859717, 0.0968844604336845) withf(x∗) = −47.7648884594915.
g15
Minimize:
f(~x) = 1000− x21 − 2x22 − x23 − x1x2 − x1x3 (C.15)
Subject to:
h1(~x) = x21 + x22 + x23 − 25 = 0h2(~x) = 8x1 + 14x2 + 7x3 − 56 = 0
where 0 ≤ xi ≤ 10 (i = 1, 2, 3). The best known solution is at x∗ = (3.51212812611795133,0.216987510429556135, 3.55217854929179921) with f(x∗) = 961.715022289961.
g16
Minimize:
f(~x) = 0.000117y14 + 0.1365 + 0.00002358y13 + 0.000001502y16+ 0.0321y12 + 0.004324y5 + 0.0001 c15
c16+ 37.48 y2
c12− 0.0000005843y17
(C.16)

C.1. Detalle de las funciones del CEC2006 91
Subject to:
g1(~x) = 0.280.72y5 − y4 ≤ 0
g2(~x) = x3 − 1.5x2 ≤ 0g3(~x) = 3496 y2
c12− 21 ≤ 0
g4(~x) = 110.6 + y1 − 62212c17
≤ 0
g5(~x) = 213.1− y1 ≤ 0g6(~x) = y1 − 405.23 ≤ 0g7(~x) = 17.505− y2 ≤ 0g8(~x) = y2 − 1053.6667 ≤ 0g9(~x) = 11.275− y3 ≤ 0g10(~x) = y3 − 35.03 ≤ 0g11(~x) = 214.228− y4 ≤ 0g12(~x) = y4 − 665.585 ≤ 0g13(~x) = 7.458− y5 ≤ 0g14(~x) = y5 − 584.463 ≤ 0g15(~x) = 0.961− y6 ≤ 0g16(~x) = y6 − 265.916 ≤ 0g17(~x) = 1.612− y7 ≤ 0g18(~x) = y7 − 7.046 ≤ 0g19(~x) = 0.146− y8 ≤ 0g20(~x) = y8 − 0.222 ≤ 0g21(~x) = 107.99− y9 ≤ 0g22(~x) = y9 − 273.366 ≤ 0g23(~x) = 922.693− y10 ≤ 0g24(~x) = y10 − 1286.105 ≤ 0g25(~x) = 926.832− y11 ≤ 0g26(~x) = y11 − 1444.046 ≤ 0
g27(~x) = 18.766− y12 ≤ 0g28(~x) = y12 − 537.141 ≤ 0g29(~x) = 1072.163− y13 ≤ 0g30(~x) = y13 − 3247.039 ≤ 0g31(~x) = 8961.448− y14 ≤ 0g32(~x) = y14 − 26844.086 ≤ 0g33(~x) = 0.063− y15 ≤ 0g34(~x) = y15 − 0.386 ≤ 0g35(~x) = 71084.33− y16 ≤ 0g36(~x) = −140000 + y16 ≤ 0g37(~x) = 2802713− y17 ≤ 0g38(~x) = y17 − 12146108 ≤ 0
where

92 Apéndice C. Apéndice
y1 = x2 + x3 + 41.6c1 = 0.024x4 − 4.62y2 = 12.5
c1+ 12
c2 = 0.0003535x21 + .5311x1 + 0.08705y2x1c3 = 0.052x1 + 78 + 0.002377y2x1y3 = c2
c3y4 = 19y3
c4 = 0.04782(x1 − y3) +0.1956(x1−y3)
2
x2+ 0.6376y4 + 1.594y3
c5 = 100x2c6 = x1 − y3 − y4c7 = 0.950− c4
c5y5 = c6c7y6 = x1 − y5 − y4 − y3c8 = (y5 + y4)0.995y7 = c8
y1y8 = c8
3798
c9 = y7 − 0.0663y7y8
− 0.3153
y9 = 96.82c9
+ 0.321y1y10 = 1.29y5 + 1.258y4 + 2.29y3 + 1.71y6y11 = 1.71x1 − 0.452y4 + 0.580y3c10 = 12.3
752.3c11 = (1.75y2)(0.995x1)c12 = 0.995y10 + 1998y12 = c10x1 + c11
c12y13 = c12 + 1.75y2y14 = 3623 + 64.4x2 + 58.4x3 + 146312
y9+x5
c13 = 0.995y10 + 60.8x2 + 48x4 − 0.1121y14 − 5095y15 = y13
c13y16 = 148000− 331000y15 + 40y13 − 61y15y13c14 = 2324y10 − 28740000y2y17 = 14130000− 1328y10 − 531y11 + c14
c12c15 = y13
y15− y13
0.52c16 = 1.104− 0.72y15c17 = y9 + x5
and where 704.4148 ≤ x1 ≤ 906.3855, 68.6 ≤ x2 ≤ 288.88, 0 ≤ x3 ≤ 134.75, 193 ≤ x4 ≤ 287.0966,and 25 ≤ x5 ≤ 84.1988.
The best known solution is at: x∗ = (705.174537070090537, 68.5999999999999943,102.899999999999991, 282.324931593660324, 37.5841164258054832) with f(x∗) = −1.90515525853479.
g17
Minimize:
f(~x) = f(x1) + f(x2) (C.17)

C.1. Detalle de las funciones del CEC2006 93
where
f1(x1) =
{30x1 0 ≤ x1 < 30031x1 300 ≤ x1 < 400
f2(x2) =
{28x2 0 ≤ x2 < 10029x2 100 ≤ x2 < 20030x2 200 ≤ x2 < 1000
Subject to:
h1(~x) = −x1 + 300− x3x4131.078 cos(1.48477− x6) +
0.90798x23
131.078 cos(1.47588)
h2(~x) = −x2 − x3x4131.078 cos(1.48477 + x6) +
0.90798x24
131.078 cos(1.47588)
h3(~x) = −x5 − x3x4131.078 sin(1.48477 + x6) +
0.90798x24
131.078 sin(1.47588)
h4(~x) = 200− x3x4131.078 sin(1.48477− x6) +
0.90798x24
131.078 sin(1.47588)
and where 0 ≤ x1 ≤ 400, 0 ≤ x2 ≤ 1000, 340 ≤ x3 ≤ 420, 340 ≤ x4 ≤ 420, −1000 ≤ x5 ≤ 1000,and 0 ≤ x6 ≤ 0.5236. The best known solution is at x∗ = (201.784467214523659, 99.9999999999999005,383.071034852773266, 420,−10.9076584514292652, 0.0731482312084287128) withf(x∗) = 8853.53967480648.
g18
Minimize:
f(~x) = −0.5(x1x4 − x2x3 + x3x9 − x5x9 + x5x8 − x6x7) (C.18)
Subject to:
g1(~x) = x23 + x24 − 1 ≤ 0g2(~x) = x29 − 1 ≤ 0g3(~x) = x25 + x26 − 1 ≤ 0g4(~x) = x21 + (x2 − x9)2 − 1 ≤ 0g5(~x) = (x1 − x5)2 + (x2 − x6)2 − 1 ≤ 0g6(~x) = (x1 − x7)2 + (x2 − x8)2 − 1 ≤ 0
g7(~x) = (x3 − x5)2 + (x4 − x6)2 − 1 ≤ 0g8(~x) = (x3 − x7)2 + (x4 − x8)2 − 1 ≤ 0g9(~x) = x27 + (x8 − x9)2 − 1 ≤ 0g10(~x) = x2x3 − x1x4 ≤ 0g11(~x) = −x3x9 ≤ 0g12(~x) = x5x9 ≤ 0g13(~x) = x6x7 − x5x8 ≤ 0
where −10 ≤ xi ≤ 10 (i = 1, ..., 8) and 0 ≤ x9 ≤ 20. The best known solution is at:x∗ = (−0.657776192427943163,−0.153418773482438542, 0.323413871675240938,−0.946257611651304398,−0.657776194376798906,−0.753213434632691414, 0.323413874123576972,− 0.346462947962331735, 0.59979466285217542) with f(x∗) = −0.866025403784439.
g19
Minimize:

94 Apéndice C. Apéndice
f(~x) =
5∑j=1
5∑i=1
cijx(10+j)x(10+j) + 2
5∑j=1
djx3(10+j) −
10∑i=1
bixi (C.19)
Subject to:
gj(~x) = −2∑5
i=1cijx(10+i) − ej +
∑10
i=1aijxi ≤ 0 j = 1, . . . , 5
where ~b = [-40, -2, -0.25, -4, -4, -1, -40, -60, 5, 1] and the remaining values are taken from TableC.1, 0 ≤ xi ≤ 10 (i = 1, . . . , 15). The best known solution is at x∗ = (1.66991341326291344e−17,3.95378229282456509e−16, 3.94599045143233784, 1.06036597479721211e−16, 3.2831773458454161,9.99999999999999822, 1.12829414671605333e−17, 1.2026194599794709e−17, 2.50706276000769697e−15,2.24624122987970677e−15, 0.370764847417013987, 0.278456024942955571, 0.523838487672241171,0.388620152510322781, 0.298156764974678579) with f(x∗) = 32.6555929502463.
j 1 2 3 4 5
ej -15 -27 -36 -18 -12c1j 30 -20 -10 32 -10c2j -20 39 -6 -31 32c3j -10 -6 10 -6 -10c4j 32 -31 -6 39 -20c5j -10 32 -10 -20 30dj 4 8 10 6 2a1j -16 2 0 1 0a2j 0 -2 0 0.4 2a3j -3.5 0 2 0 0a4j 0 -2 0 -4 -1a5j 0 -9 -2 1 -2.8a6j 2 0 -4 0 0a7j -1 -1 -1 -1 -1a9j 1 2 3 4 5a10j 1 1 1 1 1
Tabla C.1: Data set for test problem g19
g20
Minimize:
f(~x) =
24∑i=1
aixi (C.20)
Subject to:

C.1. Detalle de las funciones del CEC2006 95
gi(~x) =(xi+x(i+12))∑24
j=1xj+ei
≤ 0 i = 1, 2, 3
gi(~x) =(xi+3+x(i+15))∑24
j=1xj+ei
≤ 0 i = 4, 5, 6
h1(~x) =x(i+12)
bi+12
∑24
j=13
xjbj
− cixi
40bi
∑12
j=1
xjbj
= 0 i = 1, . . . , 12
h13(~x) =∑24
i=1xi − 1 = 0
h14(~x) =∑12
i=1x−idi
+ k∑24
i=13xibi− 1.671 = 0
i ai bi4 ci 4di ei
1 0.0693 44.094 123.7 31.244 0.12 0.0577 58.12 31.7 36.12 0.33 0.05 58.12 45.7 34.784 0.44 0.2 137.4 14.7 92.7 0.35 0.26 120.9 84.7 82.7 0.66 0.55 170.9 27.7 91.6 0.37 0.06 62.501 49.7 56.7088 0.1 84.94 7.1 82.79 0.12 133.425 2.1 80.810 0.18 82.507 17.7 64.51711 0.1 46.07 0.85 49.412 0.09 60.097 0.64 49.113 0.0693 44.09414 0.5777 6 58.1215 0.05 58.1216 0.2 137.417 0.26 120.918 0.55 170.919 0.06 62.50120 0.1 84.9421 0.12 133.42522 0.18 82.50723 0.1 46.0724 0.09 60.097
Tabla C.2: Data set for test problem g20
where k = (0.7302)(530)(14.740) and the data set is detailed Table C.2. 0 ≤ xi ≤ 10 (i =1, . . . , 24). The best known solution is at x∗ = (1.28582343498528086e−18, 4.83460302526130664e−34,0, 0, 6.30459929660781851e−18, 7.57192526201145068e−34, 5.03350698372840437e−34,9.28268079616618064e−34, 0, 1.76723384525547359e−17, 3.55686101822965701e−34,2.99413850083471346e−34, 0.158143376337580827, 2.29601774161699833e−19, 1.06106938611042947e−18,1.31968344319506391e−18, 0.530902525044209539, 0, 2.89148310257773535e−18, 3.34892126180666159e−18,0, 0.310999974151577319, 5.41244666317833561e−05, 4.84993165246959553e−16). This solution isslightly infeasible and no feasible solution has been reported so far.
g21
Minimize:

96 Apéndice C. Apéndice
f(~x) = x1 (C.21)
Subject to:
g1(~x) = −x1 + 35x0.62 + 35x0.63 ≤ 0
h1(~x) = −300x3 + 7500x5 − 7500x6 − 25x4x5 + 25x4x6 + x3x4 = 0h2(~x) = 100x2 + 155.365x4 + 2500x7 − x2x4 − 24x4x7 − 15536.5 = 0
h3(~x) = −x5 + ln(−x4 + 900) = 0h4(~x) = −x6 + ln(x4 + 300) = 0h5(~x) = −x7 + ln(−2x4 + 700) = 0
where 0 ≤ x1 ≤ 1000, 0 ≤ x2, x3 ≤ 40, 100 ≤ x4 ≤ 300, 6.3 ≤ x5 ≤ 6.7, 5.9 ≤ x6 ≤ 6.4, and 4.5 ≤x7 ≤ 6.25. The best known solution is at: x∗ = (193.724510070034967, 5.56944131553368433e−27,17.3191887294084914, 100.047897801386839, 6.68445185362377892, 5.99168428444264833,6.21451648886070451) with f(x∗) = 193.724510070035.
g22
Minimize:
f(~x) = x1 (C.22)
Subject to:
g1(~x) = −x1 + x0.62 + x0.63 x0.64 ≤ 0h1(~x) = x5 − 100000x8 + 1 ∗ 107 = 0h2(~x) = x6 − 100000x8 − 100000x9 = 0h3(~x) = x7 − 100000x9 − 5 ∗ 107 = 0h4(~x) = x5 − 100000x10 − 3.3 ∗ 107 = 0h5(~x) = x6 − 100000x11 − 4.4 ∗ 107 = 0h6(~x) = x7 − 100000x12 − 6.6 ∗ 107 = 0h7(~x) = x5 − 120x2x13 = 0h8(~x) = x6 − 80x3x14 = 0h9(~x) = x7 − 40x4x15 = 0h10(~x) = x8 − x11 + x16 = 0h11(~x) = x9 − x12 + x17 = 0
h12(~x) = −x18 + ln(x10 − 100) = 0h13(~x) = −x19 + ln(−x8 + 300) = 0h14(~x) = −x20 + ln(x16) = 0h15(~x) = −x21 + ln(−x9 + 400) = 0h16(~x) = −x22 + ln(x17) = 0h17(~x) = −x8 − x10 + x13x18 − x13x19 + 400 = 0h18(~x) = x8 − x9 − x11 + x14x20 − x14x21 + 400 = 0h19(~x) = x9 − x12 − 4.60517x15 + x15x22 + 100 = 0
where 0 ≤ x1 ≤ 20000, 0 ≤ x2, x3, x4 ≤ 1∗106, 0 ≤ x5, x6, x7 ≤ 4∗107, 100 ≤ x8 ≤ 299.99, 100 ≤x9 ≤ 399.99, 100.01 ≤ x10 ≤ 300, 100 ≤ x11 ≤ 400, 100 ≤ x12 ≤ 600, 0 ≤ x13, x14, x15 ≤ 500,0.01 ≤ x16 ≤ 300, 0.01 ≤ x17 ≤ 400, −4.7 ≤ x18, x19, x20, x21, x22 ≤ 6.25. The best known solu-tion is at: x∗ = (236.430975504001054, 135.82847151732463, 204.818152544824585, 6446.54654059436416,3007540.83940215595, 4074188.65771341929, 32918270.5028952882, 130.075408394314167,170.817294970528621, 299.924591605478554, 399.258113423595205, 330.817294971142758,184.51831230897065, 248.64670239647424, 127.658546694545862, 269.182627528746707,

C.2. Detalle de las funciones del CEC2010 97
160.000016724090955, 5.29788288102680571, 5.13529735903945728, 5.59531526444068827,5.43444479314453499, 5.07517453535834395) with f(x∗) = 236.430975504001.
g23
Minimize:
f(~x) = −9x5 − 15x8 + 6x1 + 16x2 + 10(x6 + x7) (C.23)
Subject to:
g1(~x) = x9x3 + 0.02x6 − 0.025x5 ≤ 0g2(~x) = x9x4 + 0.02x7 − 0.015x8 ≤ 0h1(~x) = x1 + x2 − x3 − x4 = 0h2(~x) = 0.03x1 + 0.01x2 − x9(x3 + x4) = 0h3(~x) = x3 + x6 − x5 = 0h4(~x) = x4 + x7 − x8 = 0
where 0 ≤ x1, x2, x6 ≤ 300, 0 ≤ x3, x5, x7 ≤ 100, 0 ≤ x4, x8 ≤ 200, and 0.01 ≤ x9 ≤ 0.03. The bestknown solution is at:x∗ = (0.00510000000000259465, 99.9947000000000514, 9.01920162996045897e−18,99.9999000000000535, 0.000100000000027086086, 2.75700683389584542e−14, 99.9999999999999574,2000.0100000100000100008) with f(x∗) = −400.055099999999584.
g24
Minimize:
f(~x) = −x1 − x2 (C.24)
Subject to:
g1(~x) = −2x41 + 8x31 − 8x21 + x2 − 2 ≤ 0g2(~x) = −4x41 + 32x31 − 88x21 + 96x1 + x− 2− 36 ≤ 0
where 0 ≤ x1 ≤ 3 and 0 ≤ x2 ≤ 4. The feasible global minimum is at:x∗ = (2.329520197477623,
17849307411774) with f(x∗) = −5.50801327159536. This problem has a feasible region consisting
on two disconnected sub-regions.
C.2. Detalle de las funciones del CEC2010
The details of the 18 test problems utilized in this work are the following:C01
Minimize:
f(~x) = −
∣∣∣∣∣∣∑D
i=1cos4(zi)− 2
∏D
i=1cos2(zi)√∑D
i=1iz2i
∣∣∣∣∣∣ z = x− o (C.25)
Subject to:
g1(~x) = 0.75−∏D
i=1zi ≤ 0
g2(~x) =∑D
i=1−7.5D ≤ 0
x ∈ [0, 10]D

98 Apéndice C. Apéndice
C02
Minimize:
f(~x) = max(z) z = x− o, y = z − 0.5 (C.26)
Subject to:
g1(~x) = 10− 1D
∑D
i=1[z2i − 10 cos(2πzi) + 10] ≤ 0
g2(~x) = 1D
∑D
i=1[z2i − 10 cos(2πzi) + 10]− 15 ≤ 0
h(~x) = 1D
∑D
i=1[y2i − 10 cos(2πyi) + 10]− 20 = 0
x ∈ [−5.12, 5.12]D
C03
Minimize:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2) z = x− o (C.27)
Subject to:
h(~x) =∑D−1
i=1(zi − zi+1)2 = 0
x ∈ [−1000, 1000]D
C04
Minimize:
f(~x) = max(z) z = x− o (C.28)
Subject to:
h1(~x) = 1D
∑D
i=1(zi cos(
√|zi|)) = 0
h2(~x) =∑D/2−1
i=1(zi − zi+1)2 = 0
h3(~x) =∑D−1
i=D/2+1(z2i − zi+1)2 = 0
h4(~x) =∑D
i=1z = 0
x ∈ [−50, 50]D
C05
Minimize:
f(~x) = max(z) z = x− o (C.29)
Subject to:
h1(~x) = 1D
∑D
i=1(−zi sin(
√|zi|)) = 0
h2(~x) = 1D
∑D
i=1(−zi cos(0.5
√|zi|)) = 0
x ∈ [−600, 600]D

C.2. Detalle de las funciones del CEC2010 99
C06
Minimize:
f(~x) = max(z) (C.30)
z = x− o, y = (x+ 4.83.6106156535− o)M − 483.6106156535
Subject to:
h1(~x) = 1D
∑D
i=1(−yi sin(
√|yi|)) = 0
h2(~x) = 1D
∑D
i=1(−yi cos(0.5
√|yi|)) = 0
x ∈ [−600, 600]D
C07
Minimize:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.31)
z = x+ 1− o, y = x− o
Subject to:
g(~x) = 0.5− exp(−0.1
√1D
∑D
i=1y2i )− 3exp( 1
D
∑D
i=1cos(0.1y)) + exp(1) ≤ 0
x ∈ [−140, 140]D
C08
Minimize:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.32)
z = x+ 1− o, y = (x− o)M
Subject to:
g(~x) = 0.5− exp(−0.1
√1D
∑D
i=1y2i )− 3exp( 1
D
∑D
i=1cos(0.1y)) + exp(1) ≤ 0
x ∈ [−140, 140]D
C09
Minimize:

100 Apéndice C. Apéndice
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.33)
z = x+ 1− o, y = x− o
Subject to:
h(~x) =∑D
i=1(y sin(
√|yi|)) = 0
x ∈ [−500, 500]D
C10
Minimize:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.34)
z = x+ 1− o, y = (x− o)M
Subject to:
h(x) =∑D
i=1(y sin(
√|yi|) = 0
x ∈ [−500, 500]D
C11
Minimize:
f(~x) =1
D
D∑i=1
(−zi cos(2√|zi|)) (C.35)
z = (x− o)M, y = x+ 1− o
Subject to:
h(x) =∑D−1
i=1(100(y2i − yi+1)2 + (yi − 1)2) = 0
x ∈ [−100, 100]D
C12
Minimize:
f(~x) =
D∑i=1
(zi sin(√|zi|)) (C.36)
z = x− o

C.2. Detalle de las funciones del CEC2010 101
Subject to:
h(~x) =∑D−1
i=1(z2 − zi+1)2 = 0
g(~x) =∑D
i=1(z − 100 cos(0.1z) + 10) ≤ 0
x ∈ [−1000, 1000]D
C13
Minimize:
f(~x) =1
D
D∑i=1
(−zi sin(√|zi|)) (C.37)
z = x− o
Subject to:
g1(~x) = −50 + 1100D
∑D
iz2i ≤ 0
g2(~x) = 50D
∑D
i=1sin( 1
50πz) ≤ 0
g3(~x) = 75− 50(∑D
i=1
z2i4000
−∏D
i=1cos( zi√
i) + 1) ≤ 0
x ∈ [−500, 500]D
C14
Minimize:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.38)
z = x+ 1− o, y = x− o
Subject to:
g1(~x) =∑D
i=1(−yi cos(
√|yi|))−D ≤ 0
g2(~x) =∑D
i=1(yi cos(
√|yi|))−D ≤ 0
g3(~x) =∑D
i=1(yi sin(
√|yi|))− 10D ≤ 0
x ∈ [−1000, 1000]D
C15
Minimize:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.39)

102 Apéndice C. Apéndice
z = x+ 1− o, y = (x− o)M
Subject to:
g1(~x) =∑D
i=1(−yi cos(
√|yi|))−D ≤ 0
g2(~x) =∑D
i=1(yi cos(
√|yi|))−D ≤ 0
g3(~x) =∑D
i=1(yi sin(
√|yi|))− 10D ≤ 0
x ∈ [−1000, 1000]D
C16
Minimize:
f(~x) =
D∑i=1
z2i4000
−D∏i=1
cos(zi√i) + 1 (C.40)
z = x− o
Subject to:
g1(~x) =∑D
i=1
[z2i − 100 cos(πz) + 10
]≤ 0
g2(~x) =∏D
i=1zi ≤ 0
h1(~x) =∑D
i=1(zi sin(
√|zi|)) = 0
h2(~x) =∑D
i=1(−zi sin(
√|zi|)) = 0
x ∈ [−10, 10]D
C17
Minimize:
f(~x) =
D−1∑i=1
(zi − zi+1)2 (C.41)
z = x− o
Subject to:
g1(~x) =∏D
i=1zi ≤ 0
g1(~x) =∑D
i=1zi ≤ 0
h1(~x) =∑D
i=1(zi sin(4
√|zi|)) = 0
x ∈ [−10, 10]D

C.2. Detalle de las funciones del CEC2010 103
C18
Minimize:
f(~x) =
D−1∑i=1
(zi − zi+1)2 (C.42)
z = x− o
Subject to:
g(~x) = 1D
∑D
i=1(−zi sin(
√|zi|)) ≤ 0
h(~x) = 1D
∑D
i=1(zi sin(
√|zi|)) = 0
x ∈ [−50, 50]D


Referencias
La autoeducación es, estoy convencido, el
único tipo de educación que existe
Issac Asimov
[1] G. V. R. A. Ravindran, K. M. Ragsdell. Engineering Optimization: Methods and Applica-tions, 2nd Edition. Wiley, 2nd edition, may 2006.
[2] B. Akay and D. Karaboga. Arti�cial bee colony algorithm for large-scale problems andengineering design optimization. Journal of Intelligent Manufacturing, 23(4):1001�1014,2012.
[3] A. Alizadegan, B. Asady, and M. Ahmadpour. Two modi�ed versions of arti�cial bee colonyalgorithm. Applied Mathematics and Computation, 225(0):601 � 609, 2013.
[4] J. M. Baldwin. A new factor in evolution. The University of Chicago Press for The AmericanSociety of Naturalists, 30(354):441�451, June 1896.
[5] M. J. Box. A new method of constrained optimization and a comparison with other methods.The Computer Journal, 8(1):42�52, 1965.
[6] I. Brajevic, M. Tuba, and M. Subotic. Improved arti�cial bee colony algorithm for constrai-ned problems. In Proceedings of the 11th WSEAS international conference on nural networksand 11th WSEAS international conference on evolutionary computing and 11th WSEAS in-ternational conference on Fuzzy systems, NN'10/EC'10/FS'10, pages 185�190, Stevens Point,Wisconsin, USA, 2010. World Scienti�c and Engineering Academy and Society (WSEAS).
[7] I. Brajevic, M. Tuba, and M. Subotic. Performance of the improved arti�cial bee colony al-gorithm on standard engineering constrained problems. Int J Math Comput Simul, 5(2):135�143, 2011.
[8] K. Deb. An e�cient constraint handling method for genetic algorithms. Computer Methodsin Applied Mechanics and Engineering, 186(24):311�338, 2000.
[9] K. DEB. Optimization for Engineering Design: Algorithms and Examples. PHI Learning,2012.
[10] A. P. Engelbrecht. Fundamentals of Computational Swarm Intelligence. John Wiley & Sons,2006.
[11] I. Fister, I. J. Fister, and J. B. Zumer. Memetic arti�cial bee colony algorithm for large-scaleglobal optimization. In Evolutionary Computation (CEC), 2012 IEEE Congress on, pages1�8, June 2012.
[12] W. E. Hart and R. K. Belew. Adaptive individuals in evolving populations. chapter Optimi-zation with Genetic Algorithm Hybrids That Use Local Searches, pages 483�496. Addison-Wesley Longman Publishing Co., Inc., Boston, MA, USA, 1996.
105

106 Referencias
[13] G. E. Hinton and S. J. Nowlan. Adaptive individuals in evolving populations. In R. K. Belewand M. Mitchell, editors, Adaptive individuals in evolving populations, chapter How learningcan guide evolution, pages 447�454. Addison-Wesley Longman Publishing Co., Inc., Boston,MA, USA, 1996.
[14] R. Hooke and T. A. Jeeves. � direct search� solution of numerical and statistical problems.J. ACM, 8(2):212�229, Apr. 1961.
[15] E. M. M. M. C. P. S. C. C. C. K. D. J.J. Liang, T. Runarsson. Problem de�nitions andevaluation criteria for the cec 2006 special session on constrained real-parameter optimization.Technical report, Nanyang Technological University, Singapore, December 2005.
[16] F. Kang, J. Li, Z. Ma, and H. Li. Arti�cial bee colony algorithm with local search fornumerical optimization. Journal of Software, 6(3), 2011.
[17] D. Karaboga and B. Akay. A modi�ed arti�cial bee colony (abc) algorithm for constrainedoptimization problems. Applied Soft Computing, 11(3):3021 � 3031, 2011.
[18] D. Karaboga and B. Basturk. A powerful and e�cient algorithm for numerical function op-timization: arti�cial bee colony (abc) algorithm. Journal of Global Optimization, 39(3):459�471, 2007.
[19] D. Karaboga, B. Gorkemli, C. Ozturk, and N. Karaboga. A comprehensive survey: arti�cialbee colony (abc) algorithm and applications. Arti�cial Intelligence Review, pages 1�37, 2012.
[20] J. Kennedy and w. Y. S. Russell C. Eberhart. Swarm Intelligence. Morgan Kaufmannpublishers, 2001.
[21] N. Krasnogor and J. Smith. A tutorial for competent memetic algorithms: model, taxonomy,and design issues. IEEE Trans. Evolutionary Computation, 9(5):474�488, 2005.
[22] M. López-Ibáñez, J. Dubois-Lacoste, T. Stützle, and M. Birattari. The irace package, iteratedrace for automatic algorithm con�guration. Technical Report TR/IRIDIA/2011-004, IRIDIA,Université Libre de Bruxelles, Belgium, 2011.
[23] E. Mezura-Montes and O. Cetina-Domínguez. Empirical analysis of a modi�ed arti�cialbee colony for constrained numerical optimization. Applied Mathematics and Computation,218(22):10943 � 10973, 2012.
[24] E. Mezura-Montes and R. Velez-Koeppel. Elitist arti�cial bee colony for constrained real-parameter optimization. In Evolutionary Computation (CEC), 2010 IEEE Congress on,pages 1�8, 2010.
[25] Z. Michalewicz and M. Schoenauer. Evolutionary algorithms for constrained parameter op-timization problems. Evolutionary Computation, 4:1�32, 1996.
[26] P. Moscato, C. Cotta, and A. Mendes. Memetic algorithms. In New Optimization Techni-ques in Engineering, volume 141 of Studies in Fuzziness and Soft Computing, pages 53�85.Springer Berlin Heidelberg, 2004.
[27] F. Neri and C. Cotta. Memetic algorithms and memetic computing optimization: A literaturereview. Swarm and Evolutionary Computation, 2(0):1 � 14, 2012.
[28] F. Neri, J. Toivanen, G. L. Cascella, and Y.-S. Ong. An adaptive multimeme algorithmfor designing hiv multidrug therapies. IEEE/ACM Trans. Comput. Biology Bioinform.,4(2):264�278, 2007.
[29] Y.-S. Ong, M.-H. Lim, and X. Chen. Memetic computation past, present, future [researchfrontier]. Computational Intelligence Magazine, IEEE, 5(2):24�31, 2010.
[30] P. N. S. R. Mallipeddi. Problem de�nitions and evaluation criteria for the cec 2010 compe-tition on constrained real-parameter optimization. Technical report, Nanyang TechnologicalUniversity, Singapore, April 2010.

Referencias 107
[31] X. Shi, Y. Li, H. Li, R. Guan, L. Wang, and Y. Liang. An integrated algorithm based onarti�cial bee colony and particle swarm optimization. In Natural Computation (ICNC), 2010Sixth International Conference on, volume 5, pages 2586�2590, 2010.
[32] R. Storn and K. Price. Di�erential evolution - a simple and e�cient adaptive scheme forglobal optimization over continuous spaces, 1995.
[33] T. Takahama and S. Sakai. Constrained optimization by the constrained di�erential evolutionwith an archive and gradient-based mutation. In Evolutionary Computation (CEC), 2010IEEE Congress on, pages 1�9, 2010.
[34] D. Whitley, V. Gordon, and K. Mathias. Lamarckian evolution, the baldwin e�ect and fun-ction optimization. In Y. Davidor, H.-P. Schwefel, and R. Manner, editors, Parallel ProblemSolving from Nature PPSN III, volume 866 of Lecture Notes in Computer Science, pages5�15. Springer Berlin Heidelberg, 1994.
[35] F. Wilcoxon. Individual comparisons by ranking methods. International Biometric Society,1(6):80�83, Dec 1945.