AERODROM E METEOROLOGICAL OBSERVATION AND … · 2011. 12. 23. · AMOFSG/9-IP/8 - 2 - 1.3 Since 15...
49
(49 pages) AMOFSG.9 AER Agenda I 1. IN 1.1 Group (A future rep weather o 1.2 the Nethe highlights at Civil A 9.IP.008.5.en.doc RODROM Item 5: Obs 5.1: Obs AUTO ME This pap Netherlan the auto reports i supervisi additiona acceptanc of how th NTRODUCT The ei AMOFSG/8) l porting of pre observations i This in erlands. The p s are reported irports in the cx ME METEO S M serving and f servations ETAR SYSTE DE er provides a nds. The syst mated gener including ba on of all issu al informatio ce by ATC o his was achiev TION ighth meeting led to the for esent weather s provided in nformation pa process of in d below. Detai Netherlands OROLOGI STUDY GR NINT Montréal, 26 forecasting a EM AT CIV ESCRIPTION (Present SU an overview tem includes ration of all ack-up system ued reports b on to ATC. of the AUTO ved is present g of the Aero rmation of an r in fully auto this informat aper describe ntroduction an ils are given i : Description ICAL OBS ROUP (AM TH MEETIN to 30 Septem at the aerodr VIL AIRPOR N AND EXPE ed by Jan Son UMMARY of the AUTO the entire te l meteorolog ms and proc by a remote m . Experience METAR sys ted as well as odrome Mete n ad-hoc grou omated weath tion paper. s the so-calle nd approval a in the append n and Experien SERVATIO MOFSG) G mber 2011 ome and in t RTS IN THE ERIENCES ndij) O METAR sy echnical infra gical aeronau cedures. It a meteorologist es of the p stem are repo s lessons learn eorological O up tasked with her reports. M ed AUTO ME as well as ex ded document nces by Waub ON AND F the terminal NETHERLA ystem used in structure use utical observ also includes who can pro performance orted. The pro ned. Observation an h reviewing t More backgro ETAR system xperiences are t entitled AUT ben and Sond ORECAST area ANDS: n the d for vation s the ovide and ocess nd Forecast the options fo ound on autom m at civil airpo e presented. TO METAR S dij. AMOFSG/9 20/9/11 T Study or the mated orts in Some System 9-IP/8
Transcript of AERODROM E METEOROLOGICAL OBSERVATION AND … · 2011. 12. 23. · AMOFSG/9-IP/8 - 2 - 1.3 Since 15...
-
(49 pages) AMOFSG.9
AER
Agenda I
1. IN
1.1 Group (Afuture repweather o
1.2 the Nethehighlightsat Civil A
9.IP.008.5.en.doc
RODROM
Item 5: Obs5.1: Obs
AUTO ME
This papNetherlanthe autoreports isupervisiadditionaacceptancof how th
NTRODUCT
The eiAMOFSG/8) lporting of preobservations i
This inerlands. The ps are reportedirports in the
cx
ME METEOS
M
serving and fservations
ETAR SYSTEDE
er provides ands. The systmated generincluding baon of all issu
al informatioce by ATC ohis was achiev
TION
ighth meetingled to the foresent weathers provided in
nformation paprocess of in
d below. Detai Netherlands
OROLOGISTUDY GR
NINT
Montréal, 26
forecasting a
EM AT CIVESCRIPTION
(Present
SU
an overview tem includes ration of allack-up systemued reports bon to ATC.of the AUTO ved is present
g of the Aerormation of anr in fully autothis informat
aper describentroduction anils are given i: Description
ICAL OBSROUP (AM
TH MEETIN
to 30 Septem
at the aerodr
VIL AIRPORN AND EXPE
ed by Jan Son
UMMARY
of the AUTOthe entire te
l meteorologms and procby a remote m. ExperienceMETAR sys
ted as well as
odrome Meten ad-hoc grouomated weathtion paper.
s the so-callend approval ain the append
n and Experien
SERVATIOMOFSG)
G
mber 2011
ome and in t
RTS IN THE ERIENCES
ndij)
O METAR syechnical infragical aeronaucedures. It ameteorologist es of the pstem are repos lessons learn
eorological Oup tasked withher reports. M
ed AUTO MEas well as ex
ded documentnces by Waub
ON AND F
the terminal
NETHERLA
ystem used instructure use
utical observalso includes
who can properformance orted. The proned.
Observation anh reviewing t
More backgro
ETAR systemxperiences aret entitled AUTben and Sond
ORECAST
area
ANDS:
n the d for
vation s the ovide
and ocess
nd Forecast the options fo
ound on autom
m at civil airpoe presented. TO METAR Sydij.
AMOFSG/920/9/11
T
Study for the mated
orts in Some
System
9-IP/8
-
AMOFSG/9-IP/8
- 2 -
1.3 Since 15 March 2011, the AUTO METAR system has been operational 24/7 at Rotterdam-The Hague Airport (EHRD). This was the final step of the introduction of the AUTO METAR system at civil airports, military airbases and off-shore structures in the Netherlands, although further improvements to the AUTO METAR system itself are planned for the near future. Professional meteorological observers are currently employed by KNMI only for carrying out aeronautical observations at Amsterdam Airport Schiphol (EHAM). The added value of the observer with respect to the capacity of the Mainport Schiphol makes their presence undisputable for the moment.
1.4 The rationale for introducing the AUTO METAR system is cost savings as local MET offices and local observing staff at airports are no longer required. The current state-of-the-art of observation techniques and technology is such that it is possible to provide an automated observation of good quality if specific measures are taken into account. At the same time, the AUTO METAR system facilitates the possibility to acquire meteorological information from airbases that are closed and unmanned during weekends and from off-shore structures on the North Sea so that a denser, both temporal and spatial, network of aeronautical meteorological observations becomes available to users.
2. DESCRIPTION OF THE AUTO METAR SYSTEM
2.1 The term “AUTO METAR system” is used to denote the entire system used for the automated production of all meteorological aeronautical reports, of which the AUTO METAR is one. The system does not only designate the sensors, the associated technical infrastructure for data acquisition, data processing and data dissemination in suitable formats, but also includes: back-up sensors, systems and procedures; remote monitoring by meteorologists and service staff; communication with users covering daily briefings, intermediate updates and handling of sensor or system maintenance or malfunction; and provisions for local points of contact for the verification of the local meteorological situation. The AUTO METAR system also includes the documentation, the procedures and the service level agreement with ATC.
2.2 It is important to note that the content of the observation reports itself can differ between airports or between states, e. g. an AUTO METAR that contains pressure, wind direction and wind speed, air temperature and dew point only versus an AUTO METAR that contains visibility, clouds, weather and TREND as well. The AUTO METAR system used at civil airports in the Netherlands always contains the full set of parameters although not all weather phenomena and descriptors are included due to limitations of automated observations.
2.3 There are different “flavours” of the AUTO METAR system used in the Netherlands. At off-shore structures, the system has no redundancy and generates only the AUTO METAR every half-hour which is disseminated without human interaction. At civil airports, the AUTO METAR system includes back-up sensors, system redundancy and back-up procedures; AUTO METAR reports (as well as auto local routine and auto special reports which are generated); and all reports are disseminated after verification and complementation remotely by a meteorologist.
2.4 Although the individual components of the AUTO METAR system have proven reliable, redundancy has been taken into account in the set-up used at civil airports and airbases. This includes measures ranging from back-up sensors using independent components of the observation infrastructure to redundant server systems. The set-up used at Rotterdam-The Hague Airport only has single points of failure for visibility and runway visible range, which needs to be assessed in the touchdown zone of the runway in use, and clouds due to the availability of a single sensor for these parameters. In case visibility information at touchdown is not available, it may be possible to approach the runway from the other side which has its own visibility sensor for instrument precision approach and landing operations.
-
AMOFSG/9-IP/8
- 3 -
Alternatively, the remote aviation meteorologist, using available information including images of video cameras and or consulting of ATC staff, can advise whether visual flight rules conditions are applicable or not.
2.5 The AUTO METAR system produces meteorological observation reports that meet ICAO requirements and includes coding issues such as: UP (unknown precipitation); TS (lightning); NCD (no clouds detected); and CB/TCU (convective clouds). During the evaluation of the AUTO METAR system various complaints of users were related to the lack of representativeness of automated visibility and cloud observations. The situation experienced by local users conflicted with the observations reported by the AUTO METAR system or the latter showed a large delay. It should be noted that these user complaints were partly related to the unfamiliarity of ATC staff with the details of the measurement systems and internationally agreed observation principles. The measurements principles and data processing algorithms have been documented and the characteristics of the automated results have been provided to users. In some cases, the situation could be improved; for example, by using a so-called marked discontinuity criteria in the averaging of visibility and also the criteria for issuing an auto local special report, such as the delay after reporting an improvement of the situation, have been redefined by mutual agreement.
2.6 The handling and reporting of missing, incomplete or incorrect sensor information has been facilitated and agreed with the users. Missing or incomplete information is indicated in the meteorological reports either by an invalid entry in the corresponding group or by adding a suitable remark. Incorrect or missing sensor information can be overruled orally by the aviation meteorologist, which is logged in the shift reports and voice recorded by ATC and KNMI.
3. EXPERIENCE WITH THE AUTO METAR SYSTEM
3.1 The time between the introduction of the AUTO METAR system and the acceptance by ATC has been used to acquire experience with the AUTO METAR system, its performance and characteristics. In this period changes have been made to the AUTO METAR system, including the documentation, communication and procedures used. Several assessments have been performed, both by KNMI and ATC, which provided useful information on pending issues. Sometimes it turned out that the technical items identified by KNMI were not essential issues for users; instead, users had a need for additional information or service from KNMI. The assessments also gave recommendations that have either been solved or are under investigation with the parties involved.
3.2 Several technical improvements are currently under investigation. However, the usage and usefulness of all the elements contained in the (auto) local routine and (auto) special reports are also being investigated. Issues are, for example: which elements are actually used; whether parameters other than wind and visibility should be runway dependent; which elements should differ for the separate arrival and departure reports that are issued at Amsterdam Airport Schiphol; and whether it is necessary to include a TREND in the auto local routine and auto local special reports.
3.3 The introduction and acceptance of the AUTO METAR system in the Netherlands was a difficult process. Several factors influenced this process, such as the emotions of staff involved; the perception that the system is operated without technical supervision and without monitoring by a meteorologist at a remote location with the possibility to provide additional information; unfamiliarity with the added value of a local observer and characteristics of automated weather observation products; and lack of experience with similar systems and the impact on operations and safety. The auto local routine and auto local special reports turned out to be the most crucial parts of the acceptance process. Open discussions between the parties involved clarified the key issues of the (AUTO) METAR system
-
AMOFSG/9-IP/8
- 4 -
and were beneficial to the acceptance of the AUTO METAR system and its quality. One key issue was that ATC and KNMI agreed on a pro-active role of the aviation meteorologist in case of significant deviations from the expected or perceived meteorological situations or for specific events.
4. ACTION BY THE AMOFSG
4.1 The AMOFSG is invited to note the contents of this information paper.
— — — — — — — —
-
AMOGSG/9/IP-8 Appendix
APPENDIX
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
i
Table of contents Table of contents ....................................................................................................................................... i 1. The AUTO METAR system ................................................................................................................... 1 1.1 Introduction ......................................................................................................................................... 1 1.2 AUTO METAR – a container concept ................................................................................................. 1 1.3 Description of automated aeronautical meteorological reports at civil airports .................................... 2 1.3.1 Definitions ........................................................................................................................................ 2 1.3.2 Characteristics ................................................................................................................................. 3 1.3.3 Coding practices .............................................................................................................................. 4 1.3.4 Availability and distribution channels ............................................................................................... 5 1.4 Description of automated aeronautical meteorological reports at military airbases ............................. 6 1.5 Description of automated aeronautical meteorological reports at North Sea off-shore structures ........ 6 2. Observation infrastructure of the AUTO METAR system ...................................................................... 7 2.1 Components of the observation infrastructure .................................................................................... 7 2.1.1 Meteorological sensors .................................................................................................................... 7 2.1.2 Sensor layout at EHRD .................................................................................................................... 7 2.1.3 Sensor layout at other locations ....................................................................................................... 8 2.1.4 Video camera system at EHRD ....................................................................................................... 9 2.1.5 Video camera system at other locations ........................................................................................ 10 2.1.6 SIAM sensor interface and multiplexer........................................................................................... 10 2.1.7 Server systems .............................................................................................................................. 11 2.2 System redundancy and backup measures ...................................................................................... 11 2.2.1 Backup sensors ............................................................................................................................. 11 2.2.2 Infrastructure redundancy .............................................................................................................. 11 2.2.3 Backup procedures for visibility and clouds ................................................................................... 12 2.2.4 Server redundancy ........................................................................................................................ 12 2.3 Optimization of the observation infrastructure ................................................................................... 13 2.3.1 Backup measures .......................................................................................................................... 13 2.3.2 Sensor issues ................................................................................................................................ 13 2.3.2.1 Insects reduced visibility ............................................................................................................. 13 2.3.2.2 Representativeness of visibility and cloud observations .............................................................. 14 2.3.2.3 CB/TCU information .................................................................................................................... 15 2.3.2.4 Video cameras ............................................................................................................................ 15 2.3.3 Reporting rules .............................................................................................................................. 15 2.3.4 Documentation issues ................................................................................................................... 15 3. Supervision of the AUTO METAR system........................................................................................... 16 3.1 Monitoring of the AUTO METAR system status ................................................................................ 16 3.1.1 Sensor status................................................................................................................................. 16 3.1.2 Monitoring by service staff ............................................................................................................. 16 3.1.3 Monitoring by operator ................................................................................................................... 16 3.2 Remote verification and complementation ........................................................................................ 17 3.2.1 Video camera images .................................................................................................................... 18 3.2.2 Local sensor information ................................................................................................................ 18 3.2.3 Regional sensor information .......................................................................................................... 19 3.2.4 Other sources of information .......................................................................................................... 20 3.2.5 Communication .............................................................................................................................. 20 3.2.6 Complementation .......................................................................................................................... 21
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
ii
4. Introduction process of and experiences with the AUTO METAR system ........................................... 22 4.1 Task Force Update Criteria (AUTO) SPECIAL .................................................................................. 22 4.2 Assessments of the AUTO METAR system ...................................................................................... 23 4.2.1 Technical assessment by KNMI ..................................................................................................... 23 4.2.2 Safety assessment by KNMI .......................................................................................................... 24 4.2.3 Safety assessment by ATC (LVNL) ............................................................................................... 25 4.2.4 Assessment of system performance .............................................................................................. 25 4.2.4.1 Phase 1 availability of sensor information ................................................................................... 25 4.2.4.2 Phase 2 availability of (AUTO) METAR and elements ................................................................ 26 4.2.4.3 Phase 3 availability of (AUTO) ACTUAL and (AUTO) SPECIAL and elements ........................... 26 4.2.4.4 Phase 4 analysis of situations with non-representative values .................................................... 27 4.3 Stakeholder Consultation and User Satisfaction ............................................................................... 28 4.4 Handling of user complaints.............................................................................................................. 30 4.5 Future improvements ........................................................................................................................ 31 4.5.1 Video Cameras .............................................................................................................................. 31 4.5.2 Representativeness of cloud observations ..................................................................................... 31 4.5.3 CB/TCU cloud types ...................................................................................................................... 32 4.5.4 Representativeness of visibility observations ................................................................................. 32 4.5.5 Visibility observations corrected for insects .................................................................................... 32 4.5.6 Representativeness of weather observations ................................................................................ 32 4.5.7 Improved precipitation type discrimination ..................................................................................... 32 4.5.8 Content of reports .......................................................................................................................... 33 4.5.9 Documentation .............................................................................................................................. 33 5. Conclusions and lessons learned ....................................................................................................... 34 6. References ......................................................................................................................................... 37 Appendix A: Fact sheet update criteria (AUTO) SPECIAL ...................................................................... 38
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
1
1. The AUTO METAR system
1.1 Introduction Since March 15, 2011 the so-called AUTO METAR system is operational at Rotterdam The Hague Airport (EHRD). As a result the weather observations are performed fully automated, but supervised by a meteorologist in the central weather room at the main premises of the Royal Netherlands Meteorological Institute (KNMI) at De Bilt. The automation of meteorological observations started at KNMI in November 2002 when all synoptic meteorological observations were fully automated. Using the same instruments and related equipment, but with algorithms tailored to suit aeronautical requirements, automated aeronautical meteorological observations were introduced at Groningen Airport Eelde (EHGG) and Maastricht Aachen Airport (EHBK) in May 2004. First this so-called AUTO METAR system was used only during closing hours of the airports, but since August 2007, after an evaluation by Air Traffic Control The Netherlands (ATC/LVNL), the AUTO METAR system became operational 24/7. From 2005 onwards the AUTO METAR system was introduced on production platforms at the North Sea. Currently 13 off shore platforms are fully equipped. In 2008 the AUTO METAR system was introduced on nine military airbases. The AUTO METAR system was introduced at Rotterdam The Hague Airport beyond opening hours in December 2010 and has been operational 24/7 since March 2011. The introduction of the AUTO METAR system at Rotterdam The Hague Airport was for the present the final step. Professional meteorological observers are currently employed by KNMI only for carrying out observations at Amsterdam Airport Schiphol (EHAM). The added value of the observer with respect to the capacity of Mainport Schiphol makes their presence undisputable for the moment. The rationale to introduce the AUTO METAR system is twofold. Developments in observation techniques and technology lead to the belief that it is possible to provide an automated observation of good quality. At the same time the introduction of the AUTO METAR system leads to significant cost savings as local MET offices and local observing staff at an airport are no longer required. As a by-product the AUTO METAR system facilitates the possibility to get meteorological information from airbases that were closed and unmanned during weekends and from productions platforms on the North Sea so that a denser, both temporal and spatial, network of aeronautical meteorological observations became available to the users. In this document the AUTO METAR system operational at Rotterdam The Hague Airport and the process of how it was achieved and approved are presented.
1.2 AUTO METAR – a container concept It is important to recognize the distinction between the product “AUTO METAR” and the “AUTO METAR system” and to bear this in mind when reading this document. The product “AUTO METAR” is a routine observation at an aerodrome and is issued as meteorological report for dissemination beyond the aerodrome. The prefix AUTO in the report is to indicate that the report is generated without intervention of a human observer at the aerodrome concerned. The term “AUTO METAR system” is used to denote the entire system used for the automated production of the meteorological aeronautical reports, and includes all automated observation reports, of which AUTO METAR is one. These reports are:
• AUTO METAR; • AUTO SPECI; • AUTO Local Routine Report, in this report referred to as AUTO ACTUAL; and, • AUTO Local Special Report, in this report referred to as AUTO SPECIAL.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
2
The term “AUTO METAR system” does not only designate the sensors, the associated technical infrastructure for data-acquisition, -processing, and the generation and dissemination of the meteorological aeronautical reports in suitable formats. The AUTO METAR system also includes the information of remote sensing systems for the detection of lightning and CB/TCU, the usage of backup sensors and systems, and the remote monitoring by meteorologists and service staff using suitable tools including e.g. real-time sensor data displays and video camera images. The meteorologist also adds the TREND to the reports. The system also includes the communication with the users covering regular daily briefings; intermediate updates for sudden changes in meteorological conditions; handling of sensor or system maintenance or malfunction; and provisions for local points of contact at air traffic control and the airport itself that can be used for the verification of the local meteorological situation. Finally, the AUTO METAR system also includes documentation, procedures and the service level agreement with ATC. It is also important to note that the content of the observation reports itself can differ between airports or between states. E.g. an AUTO METAR that contains pressure, wind direction and wind speed, air temperature and dew point only versus an AUTO METAR that contains visibility, clouds, weather and TREND as well.
1.3 Description of automated aeronautical meteorological reports at civil airports A more detailed description of the automated meteorological aeronautical reports at civil airports at The Netherlands is provided underneath.
1.3.1 Definitions The “AUTO METAR” is an aviation routine meteorological report for dissemination beyond the aerodrome. The meteorological information contained in the AUTO METAR is generally representative for the aerodrome and its immediate vicinity. The AUTO METAR is generated at H+20 and H+50 using corresponding sensor information and is disseminated after validation and addition of the TREND by a meteorologist at a remote location. The time label of the AUTO METAR is H+25 or H+55. The “AUTO SPECI” is a similar meteorological report as the AUTO METAR. The only difference is that the AUTO SPECI is issued in between the fixed time intervals of the AUTO METAR when certain criteria are met, e.g. a change of the visibility exceeding specified thresholds. As the METAR and AUTO METAR are produced half-hourly in The Netherlands the SPECI and AUTO SPECI reports are not produced at civil airports in accordance with ICAO Annex 3 (paragraph 4.4.2 b) standards. The “AUTO ACTUAL” is an aviation local routine meteorological report for landing air traffic disseminated at the aerodrome. The meteorological information contained in the AUTO ACTUAL is generally representative for the touchdown (take-off) zone or the situation along the runway. The AUTO ACTUAL is generated at H+20 and H+50 using corresponding sensor information and is disseminated after validation and complementation by a remote meteorologist. The meteorologist adds the TREND to the AUTO ACTUAL and can set indicators for specific weather phenomena (cf. section 1.2.1.2). The time label of the AUTO ACTUAL is H+25 or H+55. The “AUTO SPECIAL” is a similar meteorological report as the AUTO ACTUAL. The only difference is that the AUTO SPECIAL is issued in between the fixed time intervals of the AUTO ACTUAL when certain criteria are met, e.g. a change of the visibility exceeding specified thresholds. Note that there is a difference in representativeness between AUTO METAR and AUTO SPECI at one side and AUTO ACTUAL and AUTO SPECIAL at the other side. The same applies for several elements in the reports itself. E.g. the 10 minute averaged wind speed and direction is reported in the AUTO METAR whereas in the AUTO ACTUAL the 2 minute averaged wind is reported. Furthermore the wind of a designated wind sensor is used in the AUTO METAR whereas the wind corresponding to the runway in use is reported in the AUTO ACTUAL. Finally it should be noted that the criteria used for issuing a SPECIAL, determined by national agreement, can differ from the international SPECI criteria.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
3
1.3.2 Characteristics The coding and contents of the automated meteorological reports are basically equal to the manual reports although there are some differences. Apart from the inclusion of the term AUTO itself and specific codes related to sensor limitations like NCD (No Clouds Detected) or UP (Unknown Precipitation) some weather phenomena or descriptors are not reported in the automated reports since there are no suitable sensors to detect them - e.g. patches of fog (BC) or smoke (FU). Also note that the AUTO METAR, AUTO ACTUAL and AUTO SPECIAL are not fully automated since all reports are monitored and complemented by a meteorologist at a remote location, nor are the METAR, ACTUAL and SPECIAL completely manually generated. The so-called visual parameters related to visibility, cloud and weather information are generally entered manually, but most fields in the METAR, ACTUAL and SPECIAL are filled in automatically using processed sensor information. The meteorologist (or observer in case of a METAR, ACTUAL or SPECIAL) can discard the sensor value. In such an event the backup sensor is used automatically for most parameters, but for some, like RVR at touchdown, no alternative can be given. Identical information in manual and automated meteorological observation reports The following parameters are measured automatically and reported identically in reports compiled by a human observer and in automated reports:
• Wind • RVR • Air temperature • Dew point • QNH and QFE
In addition the runway in use is indicated by ATC and reported automatically in the (AUTO) ACTUAL and (AUTO) SPECIAL. Meteorologists at the central forecast office at De Bilt monitor the observation and shall, when appropriate, add the following items to the automated reports:
• RSM: runway state message (AUTO METAR only) • LLTI: low level temperature inversion ((AUTO) ACTUAL and (AUTO) SPECIAL only) • Windshear report • Windshear forecast ((AUTO) ACTUAL and (AUTO) SPECIAL only) • TREND: a two hour forecast at the end of the observation report
Note that at Amsterdam Airport Schiphol (EHAM) the local observer adds the above items to the reports, but the Windshear forecast and TREND are added after consultation with the aviation meteorologist at De Bilt. Differences between manual and automated meteorological observation reports Visibility
• The visibility reported in AUTO METAR, AUTO ACTUAL and AUTO SPECIAL may occasionally vary compared to a manual observation in situations where visibility is rather inhomogeneous. This is due to the point measurement principle in automated reports. For example, when fog is reported in automated reports and no fog is present above the runway, visibility at the runway may be higher. The differences can be most pronounced between METAR and AUTO METAR since an observer reports the prevailing visibility, i.e. the greatest visibility which is reached within at least half of the horizon circle or within half of the surface of the aerodrome, whereas the AUTO METAR reports the 10-minute averaged, or 2 to 10 minute averaged in case of a marked discontinuity, visibility assessed by a designated visibility sensor.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
4
RVR • RVR and visibility for usage in local MET reports are determined automatically for ACTUAL and
SPECIAL as well as for AUTO ACTUAL and AUTO SPECIAL. However, the RVR is not included directly in the local MET reports. A RVR indicator is included instead, which informs ATC whether one or more of visibility sensors at the aerodrome reports an RVR or visibility below 1500 m. In that case ATC starts requesting the RVR of all visibility sensors. The RVR indicator is set automatically in the AUTO ACTUAL and AUTO SPECIAL, whereas it is set manually in ACTUAL and SPECIAL.
Clouds • Cloud base height reports in automated reports are based on observations by laser ceilometers.
Cloud cover (cloud amount) is derived by using a specific algorithm to account for the fact that a ceilometer provides point measurements. The cloud algorithm converts a 10-minute time series of individual cloud bases reported by the ceilometer into cloud layers each with a corresponding cloud base height and cloud amount.
• The information of a ceilometer and a nearby visibility sensor are used to distinguish between a cloud base and sky obscured. In the latter case the vertical visibility is reported instead of the cloud base and amount.
• Cloud type in the form of cumulonimbus (CB) or towering cumulus (TCU) will be included in automated reports based on an algorithm which uses lightning, weather radar reflectivity and satellite information.
• Additional information about the convective characteristics of the clouds through (near) real time weather radar observations is available via the Meteorological Watch Office (MWO) at De Bilt, Meteorological Self Briefing units, ATC centres and via the aviation weather website of KNMI.
Present Weather Automated meteorological reports contain a subset of present weather codes, not the complete set as used in METAR, ACTUAL and SPECIAL reports.
• Present weather in the vicinity of the aerodrome cannot be observed and therefore the code VC is not used in automated reports.
• If precipitation type cannot be determined by the sensor, the code UP (unknown precipitation) is reported.
• The following weather phenomena or descriptors are not reported: FC, SS, DS, PO, SA, DU, FU, VA, MI, BC, PR, DR and BL (see ICAO Annex 3, Appendix 3 paragraph 4.4.2 for explanation of codes).
• Observations of present weather are carried out by a present weather sensor located on a fixed location. Only weather occurring at that specific location will be reported.
• Thunderstorms (TS) are reported when lightning is detected within a distance of 15 km from the aerodrome reference point (ARP) based on information gathered by the national lightning detection network.
1.3.3 Coding practices Codes not provided in automated meteorological observation reports
• FC, SS, DS, PO, SA, DU, FU, VA, MI, BC, PR, DR and BL (see ICAO Annex 3, Appendix 3 paragraph 4.4.2 for explanation of codes).
• VC: vicinity. • CAVOK: clouds and visibility OK. • SKC: the term "sky clear" is no longer used in manual and automated MET observations.
Codes used in automated meteorological observation reports only
• AUTO: indicator of an automated report. • NCD: no clouds detected. When the sensor does not detect clouds and no CB/TCU are detected,
the code NCD is reported due to the point measurement principle. • UP: unknown precipitation. When the type of precipitation cannot be determined by the present
weather sensor.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
5
Codes used in manual and automated meteorological observation reports
• NSC: no significant clouds. When no clouds of operational significance (cloud base 5000 ft or more and no CB/TCU) are observed, the abbreviation "NSC" is used.
Additional remarks in the REMARK section AUTO METAR can contain up to three remarks in the REMARK section. The REMARK section is disseminated in the Netherlands only, in line with international data exchange rules.
• RMK TS INFO NOT AVBL: in situations where lightning data is not available. • RMK CB INFO NOT AVBL: in situations where weather radar information is not available. • RMK WX INFO NOT AVBL: in situations where the local present weather sensor data is not
available. These REMARKs are for the moment disabled in AUTO ACTUAL and AUTO SPECIAL as the broadcast system of ATC is not yet capable of translating these codes into a voice message. As is the case with ACTUAL and SPECIAL, the meteorologist can add REMARKs on visibility, TS, CB, HAIL or Tornado, SEV SQUALL, Clouds and Turbulence in AUTO ACTUAL and AUTO SPECIAL. Coding of missing information in automated meteorological observation reports It is essential that the absence of weather or cloud information in an automated report is clearly identified as either the result of the absence of the phenomena itself, or due to failure of the sensor. In the first case the associated group is sometimes omitted in the (AUTO) METAR whereas in the latter case the group is indicated by two or more slashes. When ceilometer information is not available due to technical reasons, the cloud group will be reported by using six slashes "//////". In that case it may still be possible to report “//////CB” or “//////TCU”. The unavailability of weather information will be indicated by "//" and the unavailability of visibility information by "////". Similarly, forward slashes are used to indicate the unavailability of all other parameters. The AUTO ACTUAL and AUTO SPECIAL are distributed to ATC as a comma separated file, which is then automatically translated into a broadcast via the Automatic Terminal Information Service (ATIS). The available strings have always a distinct content. When an item is not available due to reporting practices the item is indicated by a space “ “. When an item is not available due to technical or other reasons the item is given as “N.A.”.
1.3.4 Availability and distribution channels The AUTO METAR of Rotterdam The Hague Airport is disseminated internationally in the AUTO METAR format via the Aeronautical Fixed Telecommunication Network (AFTN) and available via the regional Operational Meteorological (OPMET) centres. The AUTO METAR is nationally available via Teletext and the aviation website of KNMI. The AUTO METAR is also available via the Amsterdam MET Broadcast (VOLMET) and available on the Closed Information Circuit System (CCIS) of ATC. It should be noted that the METAR and AUTO METAR are made available and disseminated via the main office of KNMI at De Bilt. The AUTO ACTUAL and AUTO SPECIAL are locally available only via the Automatic Terminal Information Service (ATIS), the system of ATC that broadcasts the meteorological information to the pilots. The reports are also available on the Closed Information Circuit System (CCIS) of ATC. It should be noted that apart from the meteorological information contained in the AUTO ACTUAL and AUTO SPECIAL ATC also receives near real-time sensor information, specifically wind and RVR. The AUTO ACTUAL and AUTO SPECIAL and sensor information is generated on the airport server system and is made available to ATC via a local network connection.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
6
1.4 Description of automated aeronautical meteorological reports at military airbases Military airbases provide AUTO METAR, AUTO SPECI, AUTO ACTUAL and AUTO SPECIAL. Currently there are seven airbases at The Netherlands: Arnhem/Deelen (EHDL), Eindhoven (EHEH), Gilze-Rijen (EHGR), Leeuwarden (EHLW), Volkel (EHVK), Woensdrecht (EHWO) and De Kooy (EHKD). At military airbases the AUTO ACTUAL and AUTO SPECIAL are called QAM and contain identical information. The only difference is that a so-called colour state and a colour state forecast, based on NATO specifications, are included in the QAM instead of the TREND. An AUTO QAM is generated on the airport server system and is made available, via a local network connection, to military users. KNMI is responsible for operating and the maintenance of the AUTO METAR system at the seven military airbases. This includes the sensors at the airport and the hardware and software of the data acquisition, processing and dissemination modules. It should be noted that the military system also includes presentation systems that display the meteorological reports and sensor information to military air traffic controllers and other local users such as Search and Rescue (SAR) and the fire brigade. Similar presentation systems are also installed at centralized approach of the Air Operations Control Station. Differences exist between the civil and military AUTO METAR system. The meteorological observation infrastructure differs slightly from the civil aerodromes. For example the data communication lines and power supply facilities, which are provided by ATC and the military, differ and have different redundancy levels. Also the usage of backup sensors is different and no video cameras are used at airbases. Furthermore, the military system uses a single redundant server for data acquisition, processing and dissemination, whereas at civil airports data dissemination is handled by a separate redundant server. Finally, a meteorological technician with observer skills is available at each airbase during opening hours and can offer assistance to military air traffic controllers and pilots on request.
1.5 Description of automated aeronautical meteorological reports at North Sea off-shore structures On the Netherlands continental shelf are approximately 110 offshore structures with helicopter decks. Approximately 30 of these are manned structures of which 13 provide a half hourly AUTO METAR. The report is produced fully automated. The products AUTO SPECI, AUTO ACTUAL and AUTO SPECIAL are not produced. There are no backup sensors and camera’s installed at the structures. The meteorological sensors and sensor interface used at platforms are identical to the ones used at civil airports and military airbases and are operated and maintained by KNMI. The data-acquisition systems at the platforms are owned by third parties. These systems take care of the local presentation of the meteorological data and make the raw data of the KNMI sensor interface available to the external FTP server of KNMI every minute. The central server system at De Bilt acquires the data of all platforms and generates the AUTO METAR. Note that the AUTO METAR of a platform is not monitored, validated and complemented remotely by a meteorologist before dissemination.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
7
2. Observation infrastructure of the AUTO METAR system
2.1 Components of the observation infrastructure
2.1.1 Meteorological sensors The meteorological sensors used by KNMI are listed in Table 1. Table 1 reports the sensor, the associated Sensor Intelligent Adaptation Module (SIAM) sensor interface and the meteorological units. All sensors meet the requirements of the World Meteorological Organization (WMO, 2008) and the International Civil Aviation Organization (ICAO, 2010) and are maintained and calibrated by KNMI. Identical sensors are used at civil airports, military airbases, platforms at the North Sea, and at the automated weather observation stations.
Table 1. A list of meteorological sensors used by KNMI. The table also gives the associated SIAM sensor interface and the meteorological units reported by the interface.
Sensor SIAM SIAM Unit Unit description
Vaisala Impulsphysik LD40 ceilometer C4 C1 First cloud base C2 Second cloud base C3 Third cloud base CX Vertical range of measurement ZV Vertical visibility Paroscientific Digiquartz 1015A barometer P1 PS Air pressure Kipp & Zonen CM11 pyranometer Q1 QG Global radiation KNMI precipitation gauge R2 NI Precipitation intensity ND Precipitation duration Pt-500 platinum resistor element U1 TG Grass temperature 0.10m Pt-500 platinum resistor element TA Ambient temperature 1.50m Derived by SIAM TD Dew point temperature 1.50m Vaisala HMP-233 capacitive hygrometer RH Relative humidity 1.50m KNMI cup anemometer W0 WS Wind speed KNMI wind vane WR Wind direction Vaisala LM11/21 luminance meter Z4 ZA Background luminance Vaisala FD12P present weather sensor ZM Visibility (MOR) NI Precipitation intensity ND Precipitation duration PW Precipitation type ATC Runway information system B0 BB Runway usage
The last entry of Table 1 is not a meteorological sensor, but a system of ATC that indicates the runway in use. This information is provided to KNMI as a serial string with the format of the SIAM sensor interface so that it can be processed similarly as the sensor information.
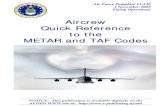
2.1.2 Sensor layout at EHRD The positions of the meteorological sensors used at Rotterdam The Hague Airport are shown in Figure 1. Rotterdam has a CAT I runway for instrument precision approach and landing operations. The runway can be used from both sides (06 and 24). Hence according to ICAO (2010) recommendations it is equipped with a wind sensor and a visibility sensor near the touchdown zone at both ends of the runway. Both of these visibility sensors are equipped with a background luminance sensor. The background luminance is used in the derivation of visibility for aeronautical purposes and the Runway Visual Range (RVR) from the Meteorological Optical Range (MOR) reported by the visibility sensor. The pressure
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
8
sensor is located at the wind mast of runway 24 and the temperature and humidity sensors are situated at the measurement field near 24 touchdown. The measurement field also contains the ceilometer, the rain gauge and a global radiation sensor. The latter two sensors are used for synoptical and climatological purposes only. Backup sensors for pressure, temperature and humidity are located at the wind mast and touchdown zone of 06. Note that the visibility sensor used at Rotterdam The Hague Airport is in fact a so-called present weather sensor which also reports the precipitation type. The precipitation type in combination with other meteorological information is used to derive the weather information. Lightning, which is also included in the weather information, is not measured locally, but is provided from the central processing unit of the lightning detection system at De Bilt. The lightning information in combination with information from weather radars and METEOSAT satellite is used to provide information on the presence of convective cloud types CB and TCU, which is added to the cloud information. Both the lightning and the CB/TCU cloud type information are provided through the network connection between Rotterdam The Hague Airport and the main offices of KNMI at De Bilt.
KVS1
Techinical Room KNMI
W = windZ = visibility / weatherC = cloudU = temperature / humidityP = pressureQ = radiationR = precipitationO = video camera
↓↑WP ZRUQCWPUZKVS2
24↓↑ 06Threshold
Aiming point
Threshold
Aiming point
Figure 1: The position of the meteorological sensors and video cameras at Rotterdam The Hague Airport. The sensors and cameras associated to touchdown 06 and 24 and their respective relay station (KVS) and data communication line to the technical room of KNMI at the airport are shown in red and blue, respectively. The measurement field not only contains temperature and humidity sensors and a ceilometer for cloud observations, but also a rain gauge and a global radiation sensor for synoptic purposes.
2.1.3 Sensor layout at other locations The layout of the meteorological sensors at EHRD is typical for a civil airport with a CAT I runway. A similar layout is used at EHGG. The sensor layout for the civil airport EHBK is nearly identical, but it contains an additional visibility sensor at the mid position as is required for a CAT III runway. A similar instrumentation is used for all CAT III runways of EHAM with 3 visibility sensors per runway and wind measurements representative for the touchdown and take-off position of each runway. Details of the sensor layout of Amsterdam Airport Schiphol can be found in Wauben and Sondij (2009). The military air bases generally have a sensor layout similar to EHRD with backup sensor for pressure, temperature and humidity, two visibility sensors per runway, but are equipped with 3 wind sensor sets. The measurement field which is located near the middle of the runway contains the primary pressure, temperature and humidity sensors and a wind sensor set on a 10-meter mast. The backup sensors for pressure, temperature and humidity are located at touchdown of the runway together with a transmissometer visibility sensor and wind on a 6-meter mast. The alternate or end position contains the FD12P present weather sensor and wind on a 6-meter mast.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
9
The platforms on the North Sea and the military airbase EHKD contain only a single sensor set. At platforms a dual wind sensor set is often used. In these cases wind is measured at opposite sides on the vent stack. The upstream sensor set is automatically selected for operational use. Also note that the precipitation gauge and pyrometer are not used at platforms.
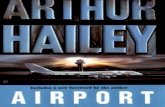
2.1.4 Video camera system at EHRD A dual video camera system is mounted on the wind mast of 24 touchdown (cf. Figure 2). The system consists of cameras mounted at 2 and about 9 m, and facilitates monitoring of the representativeness of the visibility measurements at the touchdown zone during daytime. In addition a video camera is located about 500 m before the threshold of runway 06 at a height of 2.5 m and pointed towards 24 touchdown. This camera can be used by the meteorologist to check the general meteorological conditions, particularly of cloudiness and visibility at the airport. Note that no quantitative information on the visibility can be derived from the video camera images. Only a rough check of the measured visibility can be estimated from the images. However, the cameras provide information on the nature of obscuration (shallow fog, patches). The video signal is made available via the data communication network to the central weather room and service staff of KNMI at De Bilt.
Figure 2: The FD12P visibility sensor and the wind mast with KNMI cup anemometer and wind vane near 24 touchdown at Rotterdam The Hague Airport. Video cameras are mounted at 2 m and near the top (9 m) of the frangible wind mast.
camera →
camera ↓
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
10
2.1.5 Video camera system at other locations A dual video camera system as described above for EHRD is also installed near the main touchdown of EHGG; at both ends of the runway of EHBK; and at touchdown of runway 18R of EHAM, which is located about 7 km from the local observer.
2.1.6 SIAM sensor interface and multiplexer All sensors are operated in combination with a so-called SIAM sensor interface, a Sensor Intelligent Adaptation Module. A SIAM communicates with the sensor and converts the sensor output into meteorological quantities in a fixed serial format. A SIAM runs asynchronously and polls the sensor and gets the meteorological as well as the status information. Generally the SIAM polls the sensor every 12 seconds, but if necessary the sensor interface samples the sensor with a higher frequency, e.g. the cup anemometer and wind vane are sampled with 4 Hz and the sensor interface calculates the 3 seconds running average in order to calculate the wind gust and take account of marked discontinuities of the wind. The SIAM performs a format and a range check on the meteorological quantities and generates an output string every 12 seconds. The sensors and SIAM sensor interfaces are installed in the field and are connected via fixed copper lines to a nearby relay station (KVS) of ATC which also supplies the no-break power supply. A relay station typically serves half of the runway, e.g. the sensors associated with 06 touchdown are connected to KVS1 and the sensors associated with 24 touchdown and the measurement field are connected to KVS2 (cf. Figure 1). The SIAM sensor interfaces are situated in the field either directly at the sensor, e.g. in the electronic box of the wind mast or of the visibility sensor or in the central data box at the measurement field. The latter also contains a MUF (MUltiplexing Facility) so that all SIAM data can be sent to KVS2 via a single data line. At the relay station the serial SIAM information is multiplexed on a single serial line and forwarded to the technical room via copper lines. In the technical room all incoming MUF strings are duplicated by splitters, multiplexed on to a single line and given to the server pair for further processing. An overview of the technical observation infrastructure at Rotterdam The Hague Airport is shown in Figure 3. Note that information of the Runway Information System (RIS) of ATC, which indicates which runway is in use, is also fed as a SIAM string into the MUF cascade.
Technical Room
Measurement fieldKVS 2
KVS 1
Data Box
De Bilt
Splitter
Splitter MUF
ADCM 0
ADCM 1
Splitter
Pressure 24
VideoCisco modem
Radiation
Precipitation
Temperature Humidity
DP1
Clouds
MUFXQ1
XR1
XU1
MUF
Splitter
Pressure 06DP1
Temp/Hum 06DU1
MUF
Visibility 06DZ4
Wind 06DW0
VAIS
Wind 24DW0
Splitter
MUF
MOXATest system
Cisco switch
DC4
Visibility 24 Splitter
VideoCisco modem
DZ4
Schiphol
KNMI LAN
MIS 0
MIS 1
ATC
Runway Information System
Figure 3: An overview of the sensors and SIAMs and splitters in the MUF cascade at Rotterdam The Hague Airport. Black line and boxes denote connections and components which a single point of failure. Blue lines and boxes show the secondary server system with associated sensor data. The video cameras components are denoted in green and the sensor data that is forwarded to the test server system at De Bilt is shown in red. The backscatter information of the ceilometer that is forwarded to De Bilt for monitoring of volcanic ash is also given in red.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
11
2.1.7 Server systems The 2 outputs of the MUF cascade, each containing all sensor and RIS information, are fed into a redundant server pair. In normal operation one of these ADCM (Aviation Data-acquisition and Communication Module) servers is hot and ingests all sensor data. The SIAM data that is transmitted asynchronously by the SIAM is assigned to a 12 second interval at the hot ADCM. Generally the last SIAM string of each sensor that arrived at the server in a 12 second interval is labeled with the time at the end of the interval. Some processing is involved to handle reception of either none or two SIAM strings in a 12 second interval. The ADCM monitors the status of the sensors and it also takes care of derivations, e.g. RVR and cross wind calculations and the handling of automated backup of sensors, and the generation of meteorological reports. A copy of all raw and derived data is forwarded to the cold server that stores it. The cold server continuously monitors whether the hot server is available. If communication is lost the cold becomes hot and starts processing the data. It is also possible to force a manual failover so that maintenance of the cold server can occur without interruption of the data flow. During a start-up the server checks whether a hot server is present in which case it will go into the cold mode. When 2 servers are hot, e.g. after a failure of the network communication between the 2 servers, the secondary server will automatically switch to cold. Both servers are connected to the KNMI LAN at Rotterdam The Hague Airport. Note that the server systems have 2 network cards and are connected to 2 separate network switches. The sensor and derived data is generally updated every 12 seconds. About 275 out of the total amount of 770 variables available at Rotterdam The Hague Airport update every 12 seconds. The ADCM server performs the crucial tasks of data-acquisition and processing. In order to avoid any loss of performance due to data requests by users a copy of all data is put on the MIS (Meteorological Information Server) server pair which handles the data requests for local users at the aerodrome.
2.2 System redundancy and backup measures
2.2.1 Backup sensors As indicated in Figure 3 the sensors in the field are potential single points of failure. As part of the AUTO METAR system backup sensors for pressure, temperature and humidity were installed at the wind mast and touchdown zone of 06 at EHRD. The backup of pressure, temperature, humidity and wind is automatically taken into account in the processing at the airport server system. Wind can be backed up by the sensor at the opposite end of the runway since their distance is relatively small (about 1 km) and the sheltering factors at both sites are similar. The pair of visibility sensors, however, cannot be used as each others backup as the visibility obtained with the other sensor at a distance of about 1100 m can differ significantly. Since the runway visual range and visibility should be representative for the touchdown zone a backup by the other sensor is not possible in all conditions. Rotterdam The Hague Airport is equipped with a single ceilometer.
2.2.2 Infrastructure redundancy A full redundancy of the system at Rotterdam Airport is available after the splitters in the technical room (cf. Figure 3). In case of a failure or malfunction of a system or communication line after the splitter, the full set of information is still available or after an automated failover to the secondary system. The splitters themselves and the components before the splitters like a sensor are also redundant, but in a different way. In case e.g. a sensor fails a backup sensor will be used automatically. There is, however, no backup for visibility representative for the touchdown position and clouds. A sensor and its backup sensor are located at different physical locations at the airport and they use other parts of the observation infrastructure such as power supply, multiplexers, splitters, data communication lines and relay stations in order to get the sensor information to the servers systems in the technical room. Hence, should a sensor or an associated component of the observation infrastructure fail then the backup sensor is still available. Even if a connection to a relay station or a MUF at a relay station or a splitter in the technical room fails and all the sensor data of that end of the
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
12
runway is not available, the backup sensors of pressure, wind, temperature, humidity and weather are still available. There is, however, no automated backup for visibility and clouds. Note that at Amsterdam Airport Schiphol the redundancy of the infrastructure is at a higher level since sensors and other equipment in the field are connected to a no-break power supply provided by ATC; the sensor information is split at the relay stations in the field and is fed twice to a redundant data communication infrastructure of ATC; the redundant server systems are located at 2 different locations.
2.2.3 Backup procedures for visibility and clouds In case of a failure of a visibility sensor or ceilometer or associated infrastructure the visibility information of the corresponding touchdown position or the cloud information is not available. In such a situation the aviation meteorologist in the central weather room of KNMI at De Bilt can orally provide the missing visibility or cloud information. For that purpose the meteorologist uses the images of the video cameras, the information provided by the meteorological network from nearby stations, information from remote sensing systems, the expected atmospheric conditions and verification of the meteorological situation with local staff of the airport or ATC by means of asking direct questions, e.g. whether visibility markers are visible or not. Note that in such a situation the meteorologist does not make an observation, but indicates whether so-called Visual Flight Rules (VFR) conditions are applicable or not. During VFR conditions the runway can still be used although the air traffic capacity is less than for instrument precision approach and landing operations that apply for Instrument Flight Rules (IFR). The information that is provided orally in case of a malfunction of an observation system or associated infrastructure is logged in the shift reports and voice recorded by ATC and KNMI. When the information of the visibility sensor at touchdown is not available the runway can only be used if a visibility of 3000 meters or more can be determined by using the cameras or via consulting the ATC staff by telephone. For this purpose Air Traffic Controllers have been provided with a 360 degree overview map of the airport containing reference objects with defined visibility distances. If the visibility cannot be determined or is below 3000 meters the airport cannot be used for instrument landing approaches. However, in such a situation it may be possible to approach the runway from the other side and use the visibility sensor at touchdown. Naturally any failure is handled by KNMI service staff according to the agreed response time as given in the service level agreement between KNMI and ATC The Netherlands.
2.2.4 Server redundancy The server pair for processing the data (ADCM) and providing the data to the local users (MIS) is duplicated. In case one server fails the other takes over automatically. At Amsterdam Airport Schiphol there is even a third server system with a different operation system, a different application with only the basic functionality and implemented by another manufacturer using different software tools that can provide the most essential data in case the redundant ADCM/MIS fails. The network components at Rotterdam The Hague Airport are also redundant and each server has 2 network cards and connects to both network switches. Since the servers are located at the airport itself the processing and dissemination of meteorological data to local users runs autonomously and continues uninterrupted if the network connection to De Bilt is lost. In such a situation the airport users still get the local routine and local special reports (AUTO ACTUAL and AUTO SPECIAL) and have access to the processed wind and runway visual range data. During a disruption of the network connection to De Bilt, Rotterdam The Hague Airport receives no lightning and CB/TCU information. This missing information is indicated in the meteorological reports. Loss of the network connection to De Bilt also means that the monitoring of the sensor information by the meteorologist is hampered. For that purpose a backup network connection between Rotterdam The Hague Airport and Amsterdam Airport Schiphol is available. The KNMI observer at Schiphol can monitor the sensor information and add the TREND forecast, as well as Runway State Message, Windshear and Low Level Temperature Information, in close collaboration with the aviation meteorologist at De Bilt when needed.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
13
2.3 Optimization of the observation infrastructure The period between the first introduction of the AUTO METAR system at Groningen Airport Eelde and Maastricht Aachen Airport in May 2004 and the implementation of the AUTO METAR system at Rotterdam The Hague Airport in March 2011 was used to improve the system based on the experiences and feedback from users. Some improvements to the system are highlighted in the following subsections.
2.3.1 Backup measures The implementation of backup sensors at Rotterdam The Hague Airport has already been mentioned in section 2.2.1. Note that backup sensors for pressure, temperature and humidity have also been installed at Groningen Airport Eelde and Maastricht Aachen Airport. Visibility and runway visual range at the touchdown position have no backup. The reason for this is that due to the large spatial differences that can occur for visibility the sensor at the other end of the runway cannot be used as a backup. A suitable backup sensor for visibility would require an additional visibility sensor near the touchdown position. However, even if such a backup sensor would be available near the touchdown position it would still use the same infrastructure unless the complete chain would be duplicated, which would be very expensive. Visibility at touchdown position is an accepted single point of failure. Note that in the current situation the same infrastructure as for the ATC systems is partly used. Hence in case of a malfunction at e.g. the relay stations or the connections to the technical room the corresponding ATC systems would also be not available. The introduction of backup measures only makes sense by considering the total context. Note that in case the visibility at a touchdown position is not available, the sensor at the other end of the runway, which uses a different part of the infrastructure, will generally still be available so that the runway can be approached from the other side. When the visibility conditions are critical the wind conditions are usually such that there are no restrictions in that respect either. In case of good visibility conditions the runway can be used under so-called visual flight rules (VFR). The video cameras have been introduced at the airport as a tool for assisting the meteorologist to verify whether VFR conditions apply. The meteorologist can also consult ATC staff by telephone. For this purpose Air Traffic Controllers have been provided with a 360 degree overview map of the airport containing reference objects with defined visibility distances.
2.3.2 Sensor issues
2.3.2.1 Insects reduced visibility During the evaluation of the AUTO METAR system at Rotterdam The Hague Airport situations occurred when the MOR reported by the visibility sensor sometimes reported reduced values around sunset. Investigations showed that insects in the measurement volume can cause a significant decrease of the MOR reported by a forward scatter visibility sensor. Collaboration with manufacturer was established in order to filter the spikes due to insects in the raw sensor signal before calculation of the MOR. A field test evaluation of the MOR reported by an FD12P equipped with firmware that filtered for insects showed good results (cf. Wauben, 2011). KNMI currently prepares the introduction of an updated firmware with insect filtering of the MOR for operational use at civil airports.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
14
0 3 6 9 12 15 18 21 2440
100
1000
10000
50000
Time (UT)
MO
R (m
)
MOR FD12P raw (m) MOR FD12P corrected (m) MOR Reference (m) Background Luminance FD12P (cd/m2)
3
10
100
1000
10000
50000
Background luminance (cd/m
2)
Figure 4: The 1-minute averaged MOR and background luminance observed by a FD12P forward scatter visibility sensor at De Bilt on August 5, 2010. The background luminance (blue curve with scale on the right) is 4 cd/m2 at nighttime and show a sharp increase near sunrise (3:30 UT) and a decrease near sunset (20 UT). The MOR (black curve with scale on the left) show values exceeding 10 km. Around sunrise (3 to 5 UT) and at night (22-24 UT) low MOR values occur during fog. Similar MOR values are reported by a transmissometer at De Bilt during these periods (not shown). Reduced MOR values due to insects occur around sunset (19:30 to 20:30 UT) with values below 1 km. The MOR of the transmissometer shows no reduced MOR values during this period. The insect filtering of the FD12P mitigates the MOR reduction significantly (red curve) although the corrected MOR still shows MOR reductions compared to a constructed reference (green curve) which is in fact the rescaled MOR of the transmissometer. The corrected MOR is, however, above aeronautical visibility limits.
2.3.2.2 Representativeness of visibility and cloud observations During the evaluation of the AUTO METAR system at the regional airports various complaints of users were related to lacking representativeness of the visibility and cloud observations by visibility sensors and ceilometers. The situation experienced by local users conflicted with the observations reported by the AUTO METAR system or the latter showed a large delay. Hence users complained about faulty sensor observations. Analysis of these situations showed that the sensors and corresponding algorithms worked correctly, but that measurements at a specific location can deviate significantly from that of an observer looking around. For example clouds associated to a front can only be reported by a ceilometer once they are directly overhead and then it takes 10-minutes before the cloud algorithm changes the cloud cover to overcast. Similar deviations can occur for visibility. The reported visibility is generally a 10-minute averaged value. A so-called marked discontinuity criteria is used which reduced the averaging period to 2-minutes when the visibility changes significantly. It should be noted that the user complaints that were related to lacking representativeness of the visibility and cloud observations were partly related to the unfamiliarity of ATC staff with the details of the measurement systems and internationally agreed observation principles.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
15
The usage of multiple sensors, e.g. ceilometers, has been considered to improve the spatial representativeness of the observations. The cloud algorithm uses a 10-minute time series of individual cloud base height measurements reported by the ceilometer. The fraction of the sky evaluated by the cloud algorithm can be imagined as a narrow strip along the sky, the width of this strip is determined by the opening angle of the ceilometer and the length by the movement of the clouds due to the wind aloft. Several of such strips are considered when multiple ceilometers are combined in the cloud algorithms. Even by using several ceilometers only a small portion of the entire sky will be sampled. Analysis of the use of three instead of one ceilometer at Schiphol versus the observer in 2002 showed therefore only little improvement. Another observation technique is required to solve the spatial representativeness issue. For that purpose a scanning pyrometer, the so-called NubiScope, has been evaluated (Wauben et al, 2010). The NubiScope performs a scan of the entire sky every 10-minutes during which the thermal infrared sensor determines the sky temperature in 1080 orientations. From the sky temperature the presence of clouds can be determined. The total cloud cover obtained with the NubiScope showed good results, but accurate height information, which is crucial for aeronautical purposes, is unfortunately lacking.
2.3.2.3 CB/TCU information In 2004 CB/TCU information was not included in the AUTO METAR system. At the end of 2006 CB/TCU information derived from lightning and precipitation radar reflectivity data was added to the system. Recently, the CB/TCU product has been improved by using METEOSAT satellite data in addition to radar and lightning data.
2.3.2.4 Video cameras Video camera systems have been installed at civil airports as a tool for the meteorologist to check the meteorological conditions at the airport remotely. The video images can be used as a source of information on cloudiness, visibility and present weather. Although the images give an indication of cloudiness and visibility, the quality of images is generally considered too poor for an accurate estimation of cloudiness and visibility. Options to improve the video camera systems are currently considered.
2.3.3 Reporting rules During the evaluation period some bugs in the software and configuration were identified and solved. Furthermore it was noted that sometimes an undesired delay occurred as a result of a combination of the integration time for the derived variable and the criteria for issuing a local special report, the so-called (AUTO) SPECIAL. The SPECIAL criteria used in The Netherlands were reviewed by a Task Force consisting of experts of KNMI and ATC. The recommendations of the Task Force which consisted of adjustments to thresholds and criteria for issuing a (AUTO) SPECIAL have been accepted and implemented by both organizations. For example the delay in reporting the improvement of the visibility has been specified as 5 minutes, by local agreement. In addition, a marked discontinuity was introduced in the calculation of the 10-minute averaged visibility in order to reduce the response time for sudden changes in visibility conditions.
2.3.4 Documentation issues Several issues reported during the evaluation of the AUTO METAR system at the regional airports could be traced to misunderstanding or misinterpretation of the results or reporting rules. For that purpose a fact sheet on SPECIAL criteria, and other documents explaining specific aspects of the AUTO METAR system, have been created. Special attention was given to the so-called visual parameters - visibility, clouds and weather. For these parameters the introduction of the AUTO METAR system not only led to different reporting rules, but also resulted in changes to the characteristics of the reported parameters. Hence the interpretation of these reported parameters needed to be adjusted in close cooperation with the users. In addition, so-called introduction sessions with air traffic controllers were held on location and aviation meteorologists were instructed in ATC operations.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
16
3. Supervision of the AUTO METAR system
3.1 Monitoring of the AUTO METAR system status
3.1.1 Sensor status The advanced meteorological sensors perform a real-time check on the sensor status. For that purpose the signal of various sensor modules are monitored internally and warning or errors messages are generated when certain threshold values are exceeded. Internal check can also include measurement of the electronic noise, the stability of an emitter and the sensitivity of a receiver against internal references as well as the contamination of the lenses of optical sensors. The sensor status is passed on to the SIAM sensor interface and is available in near real-time together with the measured values itself. The sensor interface performs a real-time validation on the format of the received sensor messages. It also does internal checks on the quality of the received meteorological data. All parameters are checked against the climatological range. Depending on the expected variability of a meteorological unit under consideration additional checks on a too large variability or sudden jumps or a lack of variability in the observed unit are performed. When more meteorological units are available at a SIAM sensor interface, e.g. wind speed and direction or ambient and dew point temperature, then a cross validation of the units is performed. At the server system additional cross checks are performed. All these checks use warning and error thresholds and provide their results in near real-time to the airport server system. The warnings and errors are uniquely translated into a data quality which is available for each variable. Hence users as well as maintenance staff can see immediately when a warning or error status is issued.
3.1.2 Monitoring by service staff KNMI service staff monitors the sensor status of the entire network on a daily basis using the SIAM status information. Based on this information corrective or preventive maintenance is planned. Preventive maintenance is based on operational experience with the sensors. The calibration interval of the sensors ranges between 8 month for the humidity sensor and 36 month for the pressure and temperature sensor. A sensor is returned to KNMI just before the calibration is expired and replaced by another sensor. At the calibration laboratory it is first checked whether the returned sensor deviates from the reference within the allowed limits. The calibration interval is changed if the allowed limits are exceeded either too often or hardly at all. Next maintenance is performed on the sensor; it is calibrated and put into stock. Preventive maintenance in the field is also based on experience. At civil airports and airbases maintenance is performed every 2 months. The limiting factor here is cleaning of the lenses of the visibility sensors. Corrective maintenance is performed when either the sensor status or users indicate its necessity. If e.g. contamination of the lenses is reported then an additional maintenance visit is made to clean the lenses, or trained local staff is asked to perform the maintenance. A real-time check of the sensor status and output is made during and after maintenance has been performed.
3.1.3 Monitoring by operator Apart from the daily monitoring and planning of maintenance by service staff, an operator (the so-called “procesbewaker”) monitors the correct functioning of all crucial KNMI systems continuously. In case of malfunctions service staff can be alerted or requested. Action is taken according to the service level agreement. The importance and hence the priority of the maintenance of the sensor depends on the (expected) meteorological situation. If applicable corrective maintenance will be applied on a 24*7 basis. The operator has various tools to his disposal that facilitate the monitoring of the correct operation of crucial server systems and the availability of sensors and sensor information. Figure 5 shows some examples of screen available on a GDIS (Graphical DISplay) client system showing the status of sensors and MetNet systems at Rotterdam The Hague Airport.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
17
Figure 5: Screen shots of MetNet systems giving an overview of the status of Rotterdam The Hague Airport. Going clockwise from top left they show: (i) central server at De Bilt (CIBIL) giving an overview of the entire MetNet including the server and sensor status at Rotterdam; (ii) ADCM server at Rotterdam showing the (derived) sensor data on a map (iii) and in the AUTO METAR and AUTO ACTUAL report generation screen (both use the convention black data is valid; magenta denotes warning or backup; red ? is faulty or missing; and italic is manually confirmed/adjusted); (iv) the final screen shows the incoming sensor data (again color code to indicate good, warning status and error of corrupt data). The latter also shows an overview of the status of the server systems at Rotterdam The Hague Airport.
3.2 Remote verification and complementation A continuous verification of the validity of the meteorological information is performed by the aviation meteorologist who has access to the 12 second meteorological data. The validation can be performed by using the information from other sensors at the airport, by consulting the video camera images at the airport, by using the information of nearby meteorological stations, by considering the general meteorological conditions or by contacting local staff of the airport or air traffic control. The aviation meteorologist has access to near real-time data from other airports, off-shore platforms and automated weather stations that are part of MetNet, as well as satellite and weather model information. Some sources of meteorological information are illustrated below.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
18
3.2.1 Video camera images Figure 6 gives an example of the images obtained continuously from the video cameras at Rotterdam The Hague Airport. These images are available to service staff and the aviation meteorologist at the central weather room at De Bilt.
Figure 6: Illustration of the images obtained with the video cameras at 24 touchdown at Rotterdam The Hague Airport (top panels) and the camera before the threshold of runway 06.The yellow rectangle indicates the field of view of the video camera at 9 m equipped with a tele lens in the image obtained with the video camera at 2 m equipped with a wide-angle lens.
3.2.2 Local sensor information Figure 7 shows graphs of some meteorological variables centrally available in MetNet with an update every minute. Note that local information at Rotterdam The Hague Airport can also be viewed on a GDIS with a 12 second update by connecting to the ADCM server system. Other screens for displaying the local sensor information are shown in Figure 5.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
19
Figure 7: Time series of the sensor data that is centrally available in MetNet with an update every minute. The screen has four panels showing information for the civil airports Amsterdam Airport Schiphol (top left), Groningen Airport Eelde (top right), Maastricht Aachen Airport (bottom right), and Rotterdam The Hague Airport (bottom left), respectively.
3.2.3 Regional sensor information Figure 8 presents a geographical overview of the visibility observations centrally available in MetNet with an update every 10 minutes. The graph shows the visibility at the civil airports, military airbases, platforms on the North Sea and automated weather observing stations that are all part of Meteorological Network. The information of other meteorological parameter can also be presented either geographical or in trend curves.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
20
Figure 8: Illustration of the MetNet visibility information in the Netherlands that is centrally available and can be visualized geographically with an update every 10 minutes.
3.2.4 Other sources of information Apart from the information mentioned above the meteorologist has also access to satellite and weather model information. All information sources combined enables the meteorologist to create a mental image of the meteorological situation which is continuously checked against available information and updated.
3.2.5 Communication Contact between the meteorologist and local staff of the airport or air traffic control can be established in order to give information or feedback on the current and upcoming meteorological conditions. Note that the aviation meteorologist can overrule the sensor derived visibility, clouds and present weather values reported in the aeronautical reports orally or force sensors to fault so that the sensor data is disabled or, if applicable, the backup is used. The meteorologist also adds the TREND, a landing forecast with a validity of 2 hours, to the meteorological reports that are issued at least every half hour. Furthermore the meteorologist adds, if required, the runway state to the AUTO METAR report and can issue other reports (wind shear report, wind shear forecast and low level temperature inversion) as part of the AUTO ACTUAL and AUTO SPECIAL manually. There is regular contact between the aviation meteorologist and air traffic controllers. Each morning a briefing is held during which the expected meteorological situation of the next 24 hours is reported. Furthermore, contact is established when there is a significant deviation in the expected meteorological situation, in case there is a need for an update on behalf of a
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
21
specific event, in case of reasonable doubt concerning the meteorological information provided, or when there is a malfunction in the observation infrastructure.
3.2.6 Complementation Figure 9 illustrates the AUTO METAR system Rotterdam Airport, the redundancy of the system and backup procedures. The products added by the aviation meteorologist are indicated as well as the communication between the aviation meteorologist of KNMI at De Bilt and ATC at Rotterdam Airport. Note that CB/TCU is only provided by the meteorologist orally in case of a network failure between De Bilt and Rotterdam The Hague Airport. In normal situations the CB/TCU information is added automatically to the observation report based on an algorithm that runs at De Bilt and uses satellite and weather radar information.
Figure 9: Illustration of the AUTO METAR system at Rotterdam The Hague Airport in The Netherlands showing the relation between the aviation meteorologist at De Bilt and the air traffic controller at Rotterdam Airport. The effect of a failure of the data communication network is illustrated as well.
-
AUTO METAR system at civil airports in The Netherlands: Description and experiences August 5th, 2011
22
4. Introduction process of and experiences with the AUTO METAR system Rotterdam The Hague Airport is the alternate for Amsterdam Airport Schiphol. As such there is a relationship between the introduction of the AUTO METAR and the Mainport capacity. Hence the AUTO METAR system was introduced at Rotterdam The Hague Airport in line with standard ATC The Netherlands quality and performance analysis procedures. The time period between the first introduction of the AUTO METAR system at Groningen Airport Eelde and Maastricht Aachen Airport in May 2004 and the final implementation of the system at Rotterdam The Hague Airport in March 2011 was used to gain experience and to improve the system. Before the introduction safety assessments of the AUTO METAR system at Rotterdam The Hague Airport were performed and the user requirements with respect to the local routine and local special reports ((AUTO) ACTUAL and (AUTO) SPECIAL) were updated and implemented in the system.
4.1 Task Force Update Criteria (AUTO) SPECIAL The introduction of the AUTO METAR at Maastricht Aachen Airport and Groningen Airport Eelde resulted in several issues or shortcomings of the products AUTO ACTUAL and AUTO SPECIAL. An KNMI analysis showed that part of these shortcomings were not specifically related to the AUTO METAR system but arose from international coding practices and additional user requirements. ICAO Annex 3 explicitly states that the requirements should be established in consultation with the users: ‘’4.4.1 A list of criteria for special observations shall be esta