Aero Elasticity
38
Introduction to Aeroelasticity Lecture 5: Three-Dimensional Wings G. Dimitriadis Aeroelasticity
-
Upload
helloworld -
Category
Documents
-
view
21 -
download
1
description
Aero Elasticity
Transcript of Aero Elasticity

Introduction to Aeroelasticity
Lecture 5: Three-Dimensional Wings
G. Dimitriadis
Aeroelasticity
Introduction to Aeroelasticity
Wings are 3D
All the methods described until now concern 2D wing sections These results must now be extended to 3D wings because all wings are 3D There are two methods for 3D wing aeroelasticity: – Strip theory – Panel methods

Introduction to Aeroelasticity
Strip theory Strip theory breaks the wing into spanwise small strips The instantaneous lift and moment acting on each strip are given by the 2D sectional lift and moment theories (quasi-steady, unsteady etc)
S
y
dy

Introduction to Aeroelasticity
Panel methods The wing is replaced by its camber surface. The surface itself is replaced by panels of mathematical singularities, solutions of Laplace’s equation
Wake Panels
i+1,j+1
s
i,j+1
i+1,ji,j
c
y
x
z
0

Introduction to Aeroelasticity
Hancock Model A simple 3D wing model is used to introduce 3D aeroelasticity
!!"#!!"$
!!"$
!"#
!!"#
!
!"#
!"%
!"&
!"'
$
!!"#
!!"$
!
(
)*+,-
).
!
"
/*+,-
01*+,-
A rigid flat plate of span s, chord c and thickness t, suspended through an axis xf by two torsional springs, one in roll (Kγ) and one in pitch (Kθ). The wing has two degrees of freedom, roll (γ) and pitch (θ).

Introduction to Aeroelasticity
Hancock model assumptions
The plate thickness is very small compared to its other dimensions The wing is infinitely rigid (in other words it does not flex or change shape) The displacement angles γ and θ are always small The z-position of any point on the wing is
z = yγ + x − x f( )θ

Introduction to Aeroelasticity
Equations of motion As with the 2D pitch plunge wing, the equations of motion are derived using energy considerations. The kinetic energy of a small mass element dm of the wing is given by
The total kinetic energy of the wing is:
dT =12
z 2dm =12
dm yγ + x − x f( )θ ( )2
T =m12
2s2γ 2 + 3s c − 2x f( )γ θ + 2 c 2 − 3x f c + 3x f2( )θ 2( )

Introduction to Aeroelasticity
Structural equations
The potential energy of the wing is simply
The full structural equations of motion are then:
V =12Kγγ
2 +12Kθθ
2
Iγ IγθIγθ Iθ$
% &
'
( ) γ
θ * + ,
- . /
+Kγ 00 Kθ
$
% &
'
( ) γ
θ* + ,
- . /
=M1
M2
* + ,
- . /
Iγ = ms2 /3, Iγθ = m c − 2x f( )s /4, Iθ = m c 2 − 3x f c + 3x f2( ) /3

Introduction to Aeroelasticity
Strip theory The quasi-steady or unsteady approximations for the lift and moment around the flexural axis are applied to infinitesimal strips of wing The lift and moment on these strips are integrated over the entire span of the wing The result is a quasi-steady pseudo-3D lift and moment acting on the Hancock wing
M1 = − yl y( )dy0
s
∫M2 = − mx f
y( )0
s
∫ dy

Introduction to Aeroelasticity
Quasi-steady strip theory Denote, θ=α and h=yγ. Then
Carrying out the strip theory integrations will yield the total moments around the y=0 and x=xf axes.
l
mxf

Introduction to Aeroelasticity
3D Quasi-steady equations of motion
The full 3D quasi-steady equations of motion are given by
They can be solved as usual

Introduction to Aeroelasticity
Natural frequencies and damping ratios

Introduction to Aeroelasticity
Theodorsen function aerodynamics
Again, Theodorsen function aerodynamics can (unsteady frequency domain) can be implemented directly using strip theory:
l
mxf

Introduction to Aeroelasticity
Flutter determinant
The flutter determinant for the Hancock model is given by
And is solved in exactly the same was as for the 2D pitch-plunge model.

Introduction to Aeroelasticity
p-k solution

Introduction to Aeroelasticity
Comparison of flutter speeds Wagner and Theodorsen solutions are identical. Quasi-steady solution is the most conservative Ignore the other solutions

Introduction to Aeroelasticity
Comparison of 3D and strip theory, static case
The 3D lift distribution is completely different to the strip theory result!

Introduction to Aeroelasticity
Vortex lattice aerodynamics Strip theory is a very gross approximation that is only exact when the wing’s aspect ratio is infinite. It is approximately correct when the aspect ratio is very large It becomes completely unsatisfactory at moderate and small aspect ratios (less than 10).

Introduction to Aeroelasticity
Vortex lattice method The basis of the
VLM is the division of the wing planform to panels on which lie vortex rings, usually called a vortex lattice
A vortex ring is a rectangle made up of four straight line vortex segments.
i+1,j+1
i+1,j
ni,j
i,j+1
u
v
i,j
P
w
ri,j
x
yz
Introduction to Aeroelasticity
Characteristics of a vortex ring
The vector nij is a unit vector normal to the ring and positioned at its midpoint (the intersection of the two diagonals - also termed the collocation point) The vorticity, Γ, is constant over all the segments. Each segment is inducing a velocity [u v w] at a general point P. In the case where the point P lies on a vortex ring segment, the velocity induced is 0.
Introduction to Aeroelasticity
Panelling up and solving The process of dividing a wing planform into panels The wing can be swept, tapered and twisted. It cannot have thickness The wake must also be panelled up. The object of the VLM is to calculated the values of the vorticities Γ on each wing panel at each instant in time The vorticity of the wake panels does not change in time. Only the vorticities on the wing panels are unknowns

Introduction to Aeroelasticity
Calculating forces
Once the vorticities on the wing panels are known, the lift and moment acting on the wing can be calculated These are calculated from the pressure difference acting on each panel Summing the pressure differences of the entire wing yields the total forces and moments

Introduction to Aeroelasticity
Panels for static wing
Even if the wing is not moving, the wake must still be modelled because it describes the downwash induced on the wing’s surface and, hence, the induced drag.

Introduction to Aeroelasticity
Unsteady wake panels
At each time instance a new wake panel is shed in the wake. The previous wake panels are propagated downstream at the local flow airspeeds

Introduction to Aeroelasticity
Wake shapes Wake shape behind a rectangular wing that underwent an impulsive start from rest. The aspect ratio of the wing is 4 and the angle of attack 5 degrees.

Introduction to Aeroelasticity
Effect of Aspect Ratio on lift coefficient
Lift coefficient variation with time for an impulsively started rectangular wing of varying Aspect Ratio. It can be clearly seen that the 3D results approach Wagner’s function (2D result) as the Aspect Ratio increases.

Introduction to Aeroelasticity
Unsteady lift and drag
Lift coefficient
Drag coefficient
Unsteady lift and drag coefficients for a bird-like wing performing roll oscillations at 10Hz with amplitude 2 degrees.

Introduction to Aeroelasticity
Industrial use Unsteady wakes are beautiful but expensive to calculate. For practical purposes, a fixed wake is used with unsteady vorticity, just like Theodorsen’s method. The wake propagates at the free stream airspeed and in the free stream direction. Only a short length of wake is simulated (a few chord-lengths). The result is a linearized aerodynamic model.

Introduction to Aeroelasticity
Aerodynamic influence coefficient matrices
3D aerodynamic calculations can be further speeded up by calculating everything in terms of the mode shapes of the structure.
This treatment allows the expression of the aerodynamic forces as modal aerodynamic forces, written in terms of aerodynamic influence coefficients matrices.
These are square matrices with dimensions equal to the number of retained modes. They also depend on response frequency.
Therefore, the complete aeroelastic system can be written as a set of linear ODEs with frequency-dependent matrices, to be solved using the p-k method.

Introduction to Aeroelasticity
Commercial packages
There are two major commercial packages that can calculate 3D unsteady aerodynamics using panel methods: – MSC.Nastran – ZAERO (ZONA Technology)
They can both deal with complete, although idealized geometries
Introduction to Aeroelasticity
ZAERO AFA example
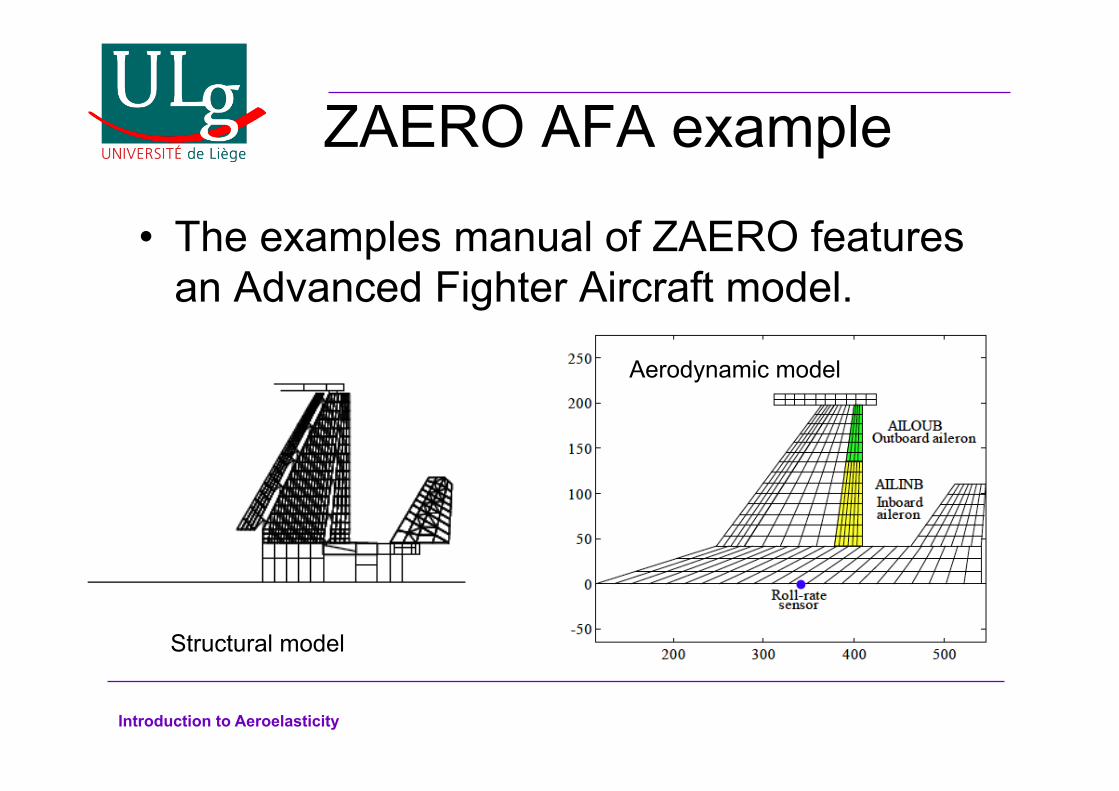
The examples manual of ZAERO features an Advanced Fighter Aircraft model.
Structural model
Aerodynamic model

Introduction to Aeroelasticity
BAH Example Bisplinghoff, Ashley and Halfman wing
FEM with 12 nodes and 72 dof

Introduction to Aeroelasticity
First 5 modes of BAH wing

Introduction to Aeroelasticity
GTA Example Here is a very simple aeroelastic model for a Generic Transport Aircraft
Finite element model: Bar elements with 678 degrees of freedom
Aerodynamic model: 2500 doublet lattice panels

Introduction to Aeroelasticity
Flutter plots for GTA
First 7 flexible modes. Clear flutter mechanism between first and third mode (first wing bending and aileron deflection)

Introduction to Aeroelasticity
Time domain plots for the GTA
V<VF V=VF

Introduction to Aeroelasticity
Supersonic Transport The SST is a
proposal for the replacement of the Concorde.
The aeroelastic model is a half-model
The aerodynamics contains the wing and a rectangle for the wall

Introduction to Aeroelasticity
Flutter plots for SST
First 9 flexible modes. Clear flutter mechanism between first and third mode.