
adémico - Universidad de Sevilladepartamento.us.es/dfisap1/salud/F1/Fisica1.pdf · adémico...
220
Copia Uso Académico Apuntes de apoyo a la asignatura FÍSICA 1 Ingeniería de la Salud UNIVERSIDAD de SEVILLA
Transcript of adémico - Universidad de Sevilladepartamento.us.es/dfisap1/salud/F1/Fisica1.pdf · adémico...

CopiaUso
Académico
Apuntes de apoyo a la asignatura
FÍSICA 1
Ingeniería de la Salud
UNIVERSIDAD de SEVILLA

CopiaUso
Académico
ii
Copyright ©2016 by Francisco L. Mesa Ledesma; esta información puede ser co-piada, distribuida y/o modificada bajo ciertas condiciones, pero viene SIN NIN-GUNA GARANTIA;ver la Design Science License para más detalles.
DESIGN SCIENCE LICENSETERMS AND CONDITIONS FOR COPYING, DISTRIBUTION AND MODIFICATIONCopyright ©1999-2001 Michael Stutz <[email protected]>Verbatim copying of this document is permitted, in any medium.0. PREAMBLE.Copyright law gives certain exclusive rights to the author of a work, including the rights to copy, modify and distribute the work (the reproductive,adaptative,.and "distributionrights).The idea of çopyleftïs to willfully revoke the exclusivity of those rights under certain terms and conditions, so that anyone can copy and distribute the work or properly attributed derivative works, while allcopies remain under the same terms and conditions as the original.The intent of this license is to be a general çopyleft"that can be applied to any kind of work that has protection under copyright. This license states those certain conditions under which a work publishedunder its terms may be copied, distributed, and modified.Whereas "design scienceïs a strategy for the development of artifacts as a way to reform the environment (not people) and subsequently improve the universal standard of living, this Design Science Licensewas written and deployed as a strategy for promoting the progress of science and art through reform of the environment.1. DEFINITIONS."License"shall mean this Design Science License. The License applies to any work which contains a notice placed by the work’s copyright holder stating that it is published under the terms of this DesignScience License."Work"shall mean such an aforementioned work. The License also applies to the output of the Work, only if said output constitutes a "derivative work.of the licensed Work as defined by copyright law..Object Form"shall mean an executable or performable form of the Work, being an embodiment of the Work in some tangible medium."Source Data"shall mean the origin of the Object Form, being the entire, machine-readable, preferred form of the Work for copying and for human modification (usually the language, encoding or formatin which composed or recorded by the Author); plus any accompanying files, scripts or other data necessary for installation, configuration or compilation of the Work.(Examples of "Source Dataïnclude, but are not limited to, the following: if the Work is an image file composed and edited in PNG format, then the original PNG source file is the Source Data; if the Work isan MPEG 1.0 layer 3 digital audio recording made from a WAV format audio file recording of an analog source, then the original WAV file is the Source Data; if the Work was composed as an unformattedplaintext file, then that file is the Source Data; if the Work was composed in LaTeX, the LaTeX file(s) and any image files and/or custom macros necessary for compilation constitute the Source Data.).Author"shall mean the copyright holder(s) of the Work.The individual licensees are referred to as 2ou."2. RIGHTS AND COPYRIGHT.The Work is copyrighted by the Author. All rights to the Work are reserved by the Author, except as specifically described below. This License describes the terms and conditions under which the Authorpermits you to copy, distribute and modify copies of the Work.In addition, you may refer to the Work, talk about it, and (as dictated by "fair use") quote from it, just as you would any copyrighted material under copyright law.Your right to operate, perform, read or otherwise interpret and/or execute the Work is unrestricted; however, you do so at your own risk, because the Work comes WITHOUT ANY WARRANTY – see Section7 ("NO WARRANTY") below.3. COPYING AND DISTRIBUTION.Permission is granted to distribute, publish or otherwise present verbatim copies of the entire Source Data of the Work, in any medium, provided that full copyright notice and disclaimer of warranty, whereapplicable, is conspicuously published on all copies, and a copy of this License is distributed along with the Work.Permission is granted to distribute, publish or otherwise present copies of the Object Form of the Work, in any medium, under the terms for distribution of Source Data above and also provided that one ofthe following additional conditions are met:(a) The Source Data is included in the same distribution, distributed under the terms of this License; or(b) A written offer is included with the distribution, valid for at least three years or for as long as the distribution is in print (whichever is longer), with a publicly-accessible address (such as a URL on theInternet) where, for a charge not greater than transportation and media costs, anyone may receive a copy of the Source Data of the Work distributed according to the section above; or(c) A third party’s written offer for obtaining the Source Data at no cost, as described in paragraph (b) above, is included with the distribution. This option is valid only if you are a non-commercial party,and only if you received the Object Form of the Work along with such an offer.You may copy and distribute the Work either gratis or for a fee, and if desired, you may offer warranty protection for the Work.The aggregation of the Work with other works that are not based on the Work – such as but not limited to inclusion in a publication, broadcast, compilation, or other media – does not bring the other worksin the scope of the License; nor does such aggregation void the terms of the License for the Work.4. MODIFICATION.Permission is granted to modify or sample from a copy of the Work, producing a derivative work, and to distribute the derivative work under the terms described in the section for distribution above,provided that the following terms are met:(a) The new, derivative work is published under the terms of this License.(b) The derivative work is given a new name, so that its name or title cannot be confused with the Work, or with a version of the Work, in any way.(c) Appropriate authorship credit is given: for the differences between the Work and the new derivative work, authorship is attributed to you, while the material sampled or used from the Work remainsattributed to the original Author; appropriate notice must be included with the new work indicating the nature and the dates of any modifications of the Work made by you.5. NO RESTRICTIONS.You may not impose any further restrictions on the Work or any of its derivative works beyond those restrictions described in this License.6. ACCEPTANCE.Copying, distributing or modifying the Work (including but not limited to sampling from the Work in a new work) indicates acceptance of these terms. If you do not follow the terms of this License, anyrights granted to you by the License are null and void. The copying, distribution or modification of the Work outside of the terms described in this License is expressly prohibited by law.If for any reason, conditions are imposed on you that forbid you to fulfill the conditions of this License, you may not copy, distribute or modify the Work at all.If any part of this License is found to be in conflict with the law, that part shall be interpreted in its broadest meaning consistent with the law, and no other parts of the License shall be affected.7. NO WARRANTY.THE WORK IS PROVIDED .AS IS,.AND COMES WITH ABSOLUTELY NO WARRANTY, EXPRESS OR IMPLIED, TO THE EXTENT PERMITTED BY APPLICABLE LAW, INCLUDING BUT NOT LIMITED TO THEIMPLIED WARRANTIES OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE.8. DISCLAIMER OF LIABILITY.IN NO EVENT SHALL THE AUTHOR OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOTLIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS WORK, EVEN IF ADVISED OF THE POSSIBILITYOF SUCH DAMAGE.END OF TERMS AND CONDITIONS
La presente “Colección de Apuntes” fue modificada el 18 de septiembre de 2018.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
Índice general
1. Repaso de matemáticas 1
1.1. Álgebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1. Resolución de sistemas de ecuaciones lineales . . . . . . . . . . 4
1.2. Geometría en el plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3. Trigonometría . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4. Desarrollos en serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.5. Cálculo diferencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.6. Cálculo integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.7. Funciones de varias variables . . . . . . . . . . . . . . . . . . . . . . . . 16
1.7.1. Teorema fundamental del cálculo . . . . . . . . . . . . . . . . . 17
1.7.2. Diferencial y derivada parcial de una función devarias variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.8. Álgebra vectorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.8.1. Vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.8.2. Suma de vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.8.3. Producto escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.8.4. Producto vectorial . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.8.5. Productos triples . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.9. Cálculo vectorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.9.1. Operador gradiente . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.9.2. Integral de camino . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.9.3. Teorema fundamental del gradiente . . . . . . . . . . . . . . . 24
1.9.4. Integral de flujo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.10. Aspectos generales de funciones armónicas . . . . . . . . . . . . . . . 25
1.11.Análisis fasorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.12.Problemas propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2. Cinemática de la partícula 31
2.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
III

CopiaUso
Académico
iv ÍNDICE GENERAL
2.2. Magnitudes Físicas. Unidades . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.1. El Sistema Internacional de unidades . . . . . . . . . . . . . . . 32
2.2.2. Conversión de unidades . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.3. Dimensiones de las magnitudes físicas . . . . . . . . . . . . . . 34
2.3. Movimiento curvilíneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.3.1. Partículas materiales . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.3.2. Vectores de posición y velocidad . . . . . . . . . . . . . . . . . . 36
2.3.3. Vector aceleración . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.3.4. Movimiento uniforme (MU) . . . . . . . . . . . . . . . . . . . . 40
2.3.5. Movimiento uniformemente acelerado (MUA) . . . . . . . . . . 41
2.4. Componentes intrínsecas de la aceleración . . . . . . . . . . . . . . . . 45
2.5. Movimiento circular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.5.1. Movimiento armónico simple . . . . . . . . . . . . . . . . . . . 52
2.6. Movimiento relativo de traslación . . . . . . . . . . . . . . . . . . . . . 52
2.7. Problemas propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3. Dinámica de la partícula 59
3.1. Leyes de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.1.1. Primera ley de Newton: Ley de la Inercia . . . . . . . . . . . . . 60
3.1.2. Segunda Ley de Newton. Fuerza y masa . . . . . . . . . . . . . . 61
3.1.3. La tercera ley de Newton. Acción y reacción . . . . . . . . . . . 64
3.2. Clasificación de las fuerzas . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.2.1. Interacciones fundamentales . . . . . . . . . . . . . . . . . . . . 65
3.2.2. Acción a distancia y contacto . . . . . . . . . . . . . . . . . . . . 67
3.3. Resolución de problemas. Diagramas de fuerzas . . . . . . . . . . . . . 71
3.3.1. Sistemas aislados . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.3.2. Problemas con dos o más cuerpos . . . . . . . . . . . . . . . . . 73
3.3.3. Fuerzas de rozamiento . . . . . . . . . . . . . . . . . . . . . . . . 75
3.4. Movimiento a lo largo de una trayectoria curva. Fuerzas centrípetas . 77
3.5. Ley de Hooke. Movimiento armónico simple . . . . . . . . . . . . . . . 78
3.5.1. Partícula unida a un muelle . . . . . . . . . . . . . . . . . . . . . 79
3.5.2. El péndulo simple . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3.6. Trabajo y energía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.6.1. Trabajo de una fuerza a lo largo de una trayectoria . . . . . . . 84
3.6.2. Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.6.3. Energía cinética . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.6.4. Fuerzas conservativas. Energía potencial . . . . . . . . . . . . . 88
3.6.5. Energía mecánica. Conservación . . . . . . . . . . . . . . . . . . 89
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
ÍNDICE GENERAL v
3.6.6. Energía del movimiento armónico simple . . . . . . . . . . . . 94
3.7. Momento lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3.7.1. Expresión alternativa segunda ley de Newton . . . . . . . . . . 95
3.7.2. Impulso y momento lineal . . . . . . . . . . . . . . . . . . . . . 96
3.8. Momento angular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
3.9. Problemas propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
4. Sistemas de partículas 105
4.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.2. Centro de masas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.3. Momento lineal de un sistema de partículas . . . . . . . . . . . . . . . 107
4.3.1. Relación fuerza - momento lineal . . . . . . . . . . . . . . . . . 107
4.3.2. Impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.4. Trabajo y Energía en un sistema de partículas . . . . . . . . . . . . . . 110
4.4.1. Energía cinética asociada al centro de masas . . . . . . . . . . . 112
4.4.2. Energía interna de un sistema de partículas . . . . . . . . . . . 113
4.5. Colisiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.6. Momento angular de un sistema de partículas . . . . . . . . . . . . . . 118
4.7. Sólido rígido con un eje principal de giro . . . . . . . . . . . . . . . . . 121
4.7.1. Momento de una fuerza respecto a un eje de giro fijo . . . . . . 121
4.7.2. Momento angular en la dirección del eje de giro . . . . . . . . . 124
4.7.3. Dinámica de la rotación del sólido rígido . . . . . . . . . . . . . 127
4.7.4. Energía cinética asociada a la rotación de un sólido rígido . . . 128
4.8. Rodadura (*) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
4.9. Problemas propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
5. Mecánica de Fluidos 139
5.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
5.2. Estática de fluidos. Presión . . . . . . . . . . . . . . . . . . . . . . . . . 140
5.2.1. Fuerzas en un fluido . . . . . . . . . . . . . . . . . . . . . . . . . 140
5.2.2. Ecuación fundamental de la hidrostática . . . . . . . . . . . . . 142
5.2.3. Manómetros y barómetros . . . . . . . . . . . . . . . . . . . . . 146
5.3. Flotación. Principio de Arquímedes . . . . . . . . . . . . . . . . . . . . 147
5.4. Dinámica de Fluidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
5.4.1. Descripción del movimiento . . . . . . . . . . . . . . . . . . . . 151
5.4.2. Líneas de flujo y ecuación de continuidad para fluidos . . . . . 153
5.5. Ecuación de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
5.6. Aplicaciones de la ecuación de Bernoulli . . . . . . . . . . . . . . . . . 155
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
vi ÍNDICE GENERAL
5.6.1. Teorema de Torricelli . . . . . . . . . . . . . . . . . . . . . . . . . 155
5.6.2. Efecto Venturi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
5.7. Viscosidad y turbulencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
5.7.1. Flujo viscoso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
5.7.2. Flujo turbulento . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
5.8. Problemas propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
6. Ondas mecánicas 165
6.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
6.2. Ecuación de ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
6.3. Ondas armónicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
6.3.1. Ondas sonoras armónicas . . . . . . . . . . . . . . . . . . . . . . 172
6.4. Energía e Intensidad de la onda . . . . . . . . . . . . . . . . . . . . . . 173
6.5. Interferencia de Ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
6.5.1. Superposición de dos ondas armónicas . . . . . . . . . . . . . 177
6.5.2. Focos incoherentes . . . . . . . . . . . . . . . . . . . . . . . . . . 178
6.5.3. Focos coherentes . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
6.6. Ondas estacionarias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
6.7. Difracción (*) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
6.8. Grupo de Ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
6.9. Problemas propuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
7. Termodinámica 195
7.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
7.2. Conceptos básicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
7.2.1. Sistemas termodinámicos . . . . . . . . . . . . . . . . . . . . . . 196
7.2.2. Variables termodinámicas y funciones de estado . . . . . . . . 196
7.2.3. Estados de equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . 197
7.2.4. Procesos termodinámicos . . . . . . . . . . . . . . . . . . . . . . 197
7.3. Equilibrio térmico y temperatura . . . . . . . . . . . . . . . . . . . . . . 198
7.3.1. Principio cero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
7.3.2. Escalas de temperatura Celsius y Fahrenheit . . . . . . . . . . . 199
7.3.3. Termómetros de gas y la escala Kelvin de temperatura . . . . . 200
7.4. Calor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
7.4.1. Definición de calor. Unidades . . . . . . . . . . . . . . . . . . . . 202
7.4.2. Calor específico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
7.4.3. Calor latente y transiciones de fase . . . . . . . . . . . . . . . . 203
7.5. Trabajo y calor en procesos termodinámicos . . . . . . . . . . . . . . . 204
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
ÍNDICE GENERAL vii
7.6. Primera Ley de la Termodinámica . . . . . . . . . . . . . . . . . . . . . 206
7.7. El gas ideal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
7.7.1. Ecuación de estado del gas ideal . . . . . . . . . . . . . . . . . . 207
7.7.2. Propiedades termodinámicas del gas ideal . . . . . . . . . . . . 208
7.8. Segunda Ley de la Termodinámica . . . . . . . . . . . . . . . . . . . . . 210
JCM,FLML Apuntes de Física 1
CopiaUso
Académico
viii ÍNDICE GENERAL
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
TEMA 1
Repaso de matemáticas
1.1. Álgebra
Algunas reglas básicas
Cuando se realizan operaciones algebraicas, se aplican las leyes de la aritmética.Símbolos como x, y y z se emplean normalmente para representar magnitudesno especificadas, denominadas incógnitas.
En primer lugar, consideremos la ecuación
8x = 32
Para despejar x, podemos dividir (o multiplicar) cada miembro de la ecuación porel mismo factor sin romper la igualdad. En este caso, dividimos ambos miembrosde la ecuación por 8, obteniendo
8x
8= 32
8⇒ x = 4
Consideremos ahora esta ecuación:
x +2 = 8
En este tipo de expresión, podemos sumar o restar la misma cantidad en cadamiembro de la ecuación. Si restamos 2 a cada miembro, obtenemos
x +2−2 = 8−2 ⇒ x = 6
En general, si x + a = b, entonces x = b − a. Consideremos ahora la siguienteecuación: x
5= 9
Si multiplicamos cada miembro de la ecuación por 5, nos queda la incógnitax en el miembro izquierdo de la ecuación y 45 en el miembro derecho:( x
5
)(5) = 9 ·5 ⇒ x = 45
En todos los casos, cualquier operación que se efectúe en el miembro izquier-do debe también efectuarse en el miembro derecho.
1

CopiaUso
Académico
2 Tema 1. Repaso de matemáticas
A continuación se muestran las reglas que se debe tener presente para multi-plicar, dividir, sumar y restar fracciones:( a
b
)( c
d
)= ac
bd(1.1)
(a/b)
(c/d)= ad
bc(1.2)
a
b± c
d= ad ±bc
bd(1.3)
Potencias
Cuando se multiplican potencias de una misma magnitud x, se aplica la si-guiente regla:
xn xm = xn+m (1.4)
Cuando se dividen potencias de una misma magnitud, la regla es
xn
xm = xn−m (1.5)
Una potencia fraccionaria, tal como 1/3, se corresponde con una raíz:
x1/n = np
x (1.6)
Por último, cualquier cantidad (xn) elevada a la potencia m es
(xn)m = xnm (1.7)
Logaritmos
Supongamos que una magnitud x se expresa como una potencia de una ciertamagnitud a:
x = ay . (1.8)
El número a se denomina base. El logaritmo de x en base a es igual al exponenteal que debe elevarse la base para satisfacer la expresión x = ay :
y = loga x . (1.9)
Inversamente, el antilogaritmo de y es el número x:
x = antiloga y .
Es también interesante recordar que siempre se cumple la identidad
x = aloga (x) . (1.10)
En la práctica, las dos bases empleadas con más frecuencia son 10, que es labase de los logaritmos decimales, y el número e = 2.71828. . ., denominado cons-tante de Euler o base de los logaritmos naturales o neperianos. Cuando se em-plean logaritmos decimales, tenemos
y = log10 x (o’ x = 10y ) (1.11)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.1. Álgebra 3
y para el logaritmo neperiano
y = ln x (o’ x = ey ) . (1.12)
Por último, algunas propiedades útiles de los logaritmos son las siguientes:
log(ab) = log a + logb (1.13)
log(a/b) = log a − logb (1.14)
log(an) = n log a (1.15)
log(1/a) =− log(a) (1.16)
logb x = logb a loga x (1.17)
log1 = 0 (1.18)
lne = 1 (1.19)
lnea = a . (1.20)
Actividad 1.1:
¿Es cierto que log(a +b) = log a + logb? Razone su respuesta.
Demuestre la identidad (1.15). [Haga uso de (1.10)]
¿Puede escribirse log a en términos de ln a?
¿Cuál es el valor de ln(−3)?
Grafique las siguientes funciones: ex , ex2, ln x, ln x2 y x ln x.
Ecuaciones lineales
Una ecuación lineal tiene la forma general siguiente:
y = mx +b (1.21)
donde m y b son constantes. Esta ecuación se denomina ecuación lineal porquela gráfica de y en función de x es una línea recta, como se muestra en la figura. Laconstante b, llamada ordenada en el origen, representa el valor de y en el que lalínea recta corta al eje y . La constante m es igual a la pendiente de la línea rectay también es igual a la tangente del ángulo que forma la línea con el eje x. Si dospuntos cualesquiera de la recta se especifican mediante las coordenadas (x1,y1)y (x2,y2), como se indica en la figura anterior, entonces la pendiente de la línearecta se puede expresar como sigue:
m = y2 − y1
x2 −x1= ∆y
∆x(1.22)
Obsérvese que m y b pueden tomar valores positivos o negativos. En la figuraanterior, tanto b como m eran positivas. En la figura adjunta se muestran otrastres posibles situaciones.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
4 Tema 1. Repaso de matemáticas
1.1.1. Resolución de sistemas de ecuaciones lineales
Consideremos la ecuación 3x +5y = 15, que tiene dos incógnitas, x e y . Unaecuación de este tipo no tiene una única solución. Por ejemplo, obsérvese que(x = 0, y = 3), (x = 5, y = 0) y (x = 2, y = 9/5) son soluciones de esta ecuación.
Si un problema tiene dos incógnitas, solo es posible obtener una solución si setienen dos ecuaciones. En general, si un problema tiene n incógnitas, su soluciónrequiere n ecuaciones. Para resolver sistemas de dos ecuaciones que impliquendos incógnitas, x e y , despejamos x en función de y en una de las ecuaciones ysustituimos dicha expresión en la otra ecuación.
Un sistema de dos ecuaciones lineales con dos incógnitas puede resolversegráficamente. Si las líneas rectas correspondientes a las dos ecuaciones se dibu-jan un sistema de ejes cartesianos, la intersección de las dos líneas representa lasolución. Por ejemplo, consideremos las dos ecuaciones siguientes:
x − y = 2
x −2y =−1
Ambas rectas se han dibujado en la figura. La intersección de las dos líneases el punto de coordenadas (x = 5, y = 3), que es la solución de este sistema dedos ecuaciones. Es aconsejable comprobar esta solución por el método analíticoexplicado anteriormente.
Factorización
He aquí algunas fórmulas útiles para descomponer en factores una ecuación:
ax +ay +az = a(x + y + z) (factor común)
a2 ±2ab +b2 = (a ±b)2 (cuadrado perfecto)
a2 −b2 = (a +b)(a −b) (diferencia de cuadrados)
(1.23)
Ecuaciones de segundo grado
La forma general de una ecuación de segundo grado es
ax2 +bx + c = 0 (1.24)
donde x es la incógnita y a, b y c son factores numéricos denominados coefi-cientes de la ecuación. Esta ecuación tiene dos soluciones, que se determinanmediante la expresión
x = −b ±p
b2 −4ac
2a(1.25)
Si b2 ≥ 4ac, las raíces son reales.
Actividad 1.2: Resuelva la siguiente ecuación:{x2 − y2 = 72(x + y) = 9
[Sol.: x = 109/36, y = 53/36]
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.2. Geometría en el plano 5
1.2. Geometría en el plano
La distancia d entre dos puntos de coordenadas (x1, y1) y (x2, y2) es
d =√
(x2 −x1)2 + (y2 − y1)2 (1.26)
La ecuación de una recta en el plano (ver figura) es
y = mx +b (1.27)
donde b es el punto donde la recta corta al eje y y m es la pendiente de la línea.
La ecuación de una circunferencia de radio R centrada en el origen es
x2 + y2 = R2 . (1.28)
La ecuación de una elipse que tiene el origen como centro (ver figura) es
0
ab
x2
a2 + y2
b2 = 1 . (1.29)
donde a es la longitud del semieje mayor y b es la longitud del semieje menor.
La ecuación de una parábola cuyo vértice se encuentra en y = b (ver figura) es
y = ax2 +b (1.30)
La ecuación de una hipérbola rectangular (ver figura) es
x y = constante (1.31)
0
b
0La figura 1.1 muestra las áreas y volúmenes para distintas formas geométricas uti-lizadas durante el curso.
Ángulos
La longitud de arco s de un arco circular (ver figura) es proporcional al radio r paraun valor fijo θ (en radianes):
s = rθ ⇒ θ = s
r. (1.32)
La relación entre radianes y grados sexagesimales es
360o = 2π rad . (1.33)
En la figura 1.2 se muestran algunas relaciones útiles entre ángulos:
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
6 Tema 1. Repaso de matemáticas
FIGURA 1.1: Áreas y volúmenes de diferentes figuras geométricas.
Actividad 1.3:
1. Exprese el ángulo β en función de α.
2. Calcule el arco de una circuferencia de radio R que recorre 1 rad. Repitael cálculo si recorre 1o.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.3. Trigonometría 7
α=β α+β= 180o
α=β AB ⊥ BD, AD ⊥ BC →α=β
FIGURA 1.2: Relaciones entre ángulos.
1.3. Trigonometría
La parte de las matemáticas que se basa en las propiedades especiales deltriángulo rectángulo se denomina trigonometría. Por definición, un triángulo rec-tángulo es aquel que tiene un ángulo de 90º. Consideremos el triángulo rectángulode la figura, en el que el lado a es el cateto opuesto al ángulo θ, el lado b es el catetoadyacente al ángulo θ y el lado c es la hipotenusa del triángulo. Las tres funcionestrigonométricas básicas definidas por este triángulo son el seno (sen), el coseno(cos) y la tangente (tan). En función del ángulo θ, estas funciones se definen delsiguiente modo:
senθ ≡ cateto opuesto a θ
hipotenusa= a
c(1.34)
cosθ ≡ cateto adyacente a θ
hipotenusa= b
c(1.35)
tanθ ≡ cateto opuesto a θ
cateto adyacente a θ= a
b= senθ
cosθ. (1.36)
El teorema de Pitágoras proporciona la siguiente relación entre los lados de untriángulo rectángulo:
c2 = a2 +b2 . (1.37)
A partir de las definiciones anteriores y del teorema de Pitágoras, se deduceque
sen2θ+cos2θ = 1 . (1.38)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
8 Tema 1. Repaso de matemáticas
La funciones cosecante, secante y cotangente se definen del siguiente modo:
cscθ ≡ 1
senθ= c
a(1.39)
secθ ≡ 1
cosθ= c
b(1.40)
cotθ ≡ 1
tanθ= b
a. (1.41)
El ángulo θ cuyo seno es x se denomina arcoseno de x y se escribe arcsenx.Análogamente, se definen las funciones arcocoseno y arcotangente:
senθ = x ⇒ θ = arcsenx
cosθ = x ⇒ θ = arccos x
tanθ = x ⇒ θ = arctan x .
Las siguientes relaciones se obtienen directamente del triángulo rectángulomostrado en la figura anterior:
senθ = cos(π/2−θ)
cosθ = sen(π/2−θ)
cotθ = tan(π/2−θ) .
Algunas propiedades de las funciones trigonométricas son
sen(−θ) =−senθ
cos(−θ) = tanθ
tan(−θ) =− tanθ .
Las siguientes relaciones se aplican a cualquier triángulo (como en la figura):
α+β+γ=π [180o] . (1.42)
a2 = b2 + c2 −2bc cosα (1.43)
b2 = a2 + c2 −2ac cosβ (1.44)
c2 = a2 +b2 −2ab cosγ . (1.45)Teorema del coseno
a
senα= b
senβ= c
senγ. (1.46)Teorema del seno
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.3. Trigonometría 9
A continuación se enumeran una serie de identidades trigonométricas útiles:
sen2θ+cos2θ = 1 (1.47)
sec2θ = 1+ tan2θ (1.48)
csc2θ = 1+cot2θ (1.49)
sen2θ = 2senθcosθ (1.50)
cos2θ = cos2θ− sen2θ (1.51)
tan2θ = 2tanθ
1− tan2θ(1.52)
sen2 θ
2= 1−cosθ
2(1.53)
cos2 θ
2= 1+cosθ
2. (1.54)
sen(A±B) = sen A cosB ±cos A senB (1.55)
cos(A±B) = cos A cosB ∓ sen A senB (1.56)
sen A± senB = 2senA±B
2cos
A∓B
2(1.57)
cos A+cosB = 2cosA+B
2cos
A−B
2(1.58)
cos A−cosB = 2senA+B
2sen
B − A
2. (1.59)
En la figura 1.3 se representan las funciones trigonométricas en función de θ.Las funciones seno y coseno tienen un periodo 2π rad (o 360º). Es decir, para cual-quier valor de θ, sen(θ+2π) = senθ. La función tangente tiene un periodo deπ rad(o 180º).
Actividad 1.4:
Exprese sen2α, cos2α, sen3α y cos4α en función de senos y cosenos deα y 2α.
En un triángulo no rectángulo, halle el valor de la longitud del catetoopuesto a dos de lado a y b y que forman un ángulo α.
Halle el valor de x que verifica la ecuación: sec2 x +2tan x = 16.[Sol.:x = arctan(3)]
La ecuación sin2 x +2cos x = 16 no tiene soluciones reales. ¿Por qué?
Determine el periodo de la función sen(3x).
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
10 Tema 1. Repaso de matemáticas
FIGURA 1.3: Funciones trigonométricas.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.4. Desarrollos en serie 11
1.4. Desarrollos en serie
Mostramos a continuación una serie de desarrollos en serie útiles:
(a +b)n =n∑k
(nk
)xn−k yk , con
(nk
)= n!
k !(n −k)!(1.60)
(1+x)n = 1+nx + n(n −1)
2!x2 +·· · (1.61)
ex = 1+x + x2
2!+ x3
3!+·· · (1.62)
ln(1±x) =±x − 1
2x2 ± 1
3x3 −·· · (1.63)
sen x = x − x3
3!+ x5
5!−·· · (1.64)
cos x = 1− x2
2!+ x4
4!−·· · (1.65)
tan x = x + x3
3+ 2x5
15+·· · (|x| <π/2) . (1.66)
Para x ¿ 1, se pueden utilizar las siguientes aproximaciones:
(1+x)n ≈ 1+nx (1.67)
ex ≈ 1+x (1.68)
ln(1±x) ≈±x (1.69)
sen x ≈ x (1.70)
cos x ≈ 1 (1.71)
tan x ≈ x . (1.72)
Actividad 1.5: Si la unidad imaginaria se define como j = p−1 y sus po-tencias vienen dadas por j2 =−1, j3 =−j, j4 = 1, . . ., demuestre la expresiónsiguiente denominada identidad de Euler: ejθ = cosθ+ jsenθ.
1.5. Cálculo diferencial
En varias ramas de la ciencia, es necesario utilizar algunas veces las herra-mientas básicas del cálculo infinitesimal, inventado por Newton, para describirlos fenómenos físicos. El uso del cálculo infinitesimal es fundamental en el tra-tamiento de distintos problemas de la mecánica newtoniana, la electricidad y elmagnetismo. En esta sección simplemente vamos a enunciar algunas propieda-des básicas y reglas prácticas.
En primer lugar, hay que especificar una función que describa cómo se rela-ciona una variable con otra (por ejemplo, una coordenada en función del tiempo).Supongamos que llamamos y a una de las variables (la variable dependiente), yx a la otra (la variable independiente). Para estas dos variables, podríamos teneruna relación funcional como la siguiente:
y(x) = ax3 +bx2 + cx +d
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
12 Tema 1. Repaso de matemáticas
Si a, b, c y d son constantes especificadas, entonces se puede calcular y pa-ra cualquier valor de x. Normalmente, trabajaremos con funciones continuas, esdecir, aquellas para las que y varía de forma suave al hacerlo x.
La derivada de y con respecto de x se define como el límite, cuando∆x tiendea cero de la pendiente de la cuerda dibujada entre dos puntos de la curva querepresenta y en función de x. Matemáticamente, escribimos esta definición delsiguiente modo:
dy
dx= lım∆x→0
∆y
∆x= lım∆x→0
y(x +∆x)− y(x)
∆x(1.73)
donde ∆y y ∆x de definen como ∆x = x2 − x1 y ∆y = y2 − y1 (ver figura). Cuando∆x tiende a cero, la cuerda se convierte en la recta tangente en un punto dado, deforma que la derivada coincide con la pendiente de dicha recta tangente. Es im-portante destacar que dy/dx no significa dy dividido entre dx, sino que simple-mente se trata de la notación de Leibnitz que se emplea para designar el procesode cálculo del límite para obtener la derivada, definido en la ecuación anterior.
Una expresión útil que conviene recordar cuando y(x) = axn , donde a es unaconstante y n es cualquier número, positivo o negativo (entero o fraccionario), es
dy
dx= naxn−1 .
Si y(x) es un polinomio o función algebraica de x, aplicamos esta última ecuacióna cada término del polinomio, siendo cero la derivada de una constante.
Propiedades especiales de las derivadas
Derivada de la suma de dos funciones. Si una función f (x) es igual a la sumade dos funciones, f (x) = g (x)+h(x), entonces la derivada de la suma es igual a lasuma de las derivadas:
d f (x)
dx= d[g (x)+h(x)]
dx= dg (x)
dx+ dh(x)
dx. (1.74)
Derivada del producto de dos funciones. Si una función f (x) está dada por elproducto de dos funciones, f (x) = g (x)h(x), entonces la derivada de f (x) se defi-ne como
d f (x)
dx= d[g (x)h(x)]
dx= dg (x)
dxh(x)+ g (x)
dh(x)
dx. (1.75)
Derivada del cociente de dos funciones. Si una función f (x) está dada por elcociente entre dos funciones, f (x) = g (x)/h(x), entonces la derivada de f (x) sedefine como
d f (x)
dx= d[g (x)/h(x)]
dx= 1
h2(x)
[dg (x)
dxh(x)− g (x)
dh(x)
dx
]. (1.76)
Regla de la cadena. Si y = f (x) y x = g (z), entonces, dy/dz puede escribirse co-mo el producto de dos derivadas:
dy
dz= dy
dx
dx
dz. (1.77)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.5. Cálculo diferencial 13
La segunda derivada. La segunda derivada de y con respecto de x se define co-mo la derivada de la función dy/dx (la derivada de la derivada). Esto se expresa,normalmente, del siguiente modo:
d2 y
dx2 = d
dx
(dy
dx
). (1.78)
Derivada inversa. La derivada de x respecto de y es la inversa de la derivada dey respecto de x, siempre que ninguna de ellas se anule:
dx
dy=
(dy
dx
)−1
. (1.79)
Ejemplo de derivadas de funciones particulares. A continuación se enumeranalgunas de las derivadas utilizadas con más asiduidad (las letras a y n representanconstantes):
d
dx(a) = 0 (1.80)
d
dx(axn) = naxn−1 (1.81)
d
dx(eax ) = aeax (1.82)
d
dx(ln(x)) = 1
x(1.83)
d
dx(sen(ax)) = a cos(ax) (1.84)
d
dx(cos(ax)) =−a sen(ax) (1.85)
d
dx(tan(ax)) = a sec2(ax) (1.86)
d
dx(arctan(x)) = 1
1+x2 . (1.87)
Actividad 1.6:
Grafique algunos ejemplos de funciones continuas y discontinuas cu-ya derivada en el origen (x = 0) no sea continua. Dé las expresionesmatemáticas de algunas de ellas.
Explique las razones por las que el concepto de derivada es tan suma-mente relevante en Física e Ingeniería.
Exprese en palabras y de forma clara el significado de la siguienteecuación: d f (x)/dx = f (x). ¿Existe alguna función que satisfaga la an-terior ecuación? ¿Existe alguna diferencia fundamental con ecuacio-nes del tipo x3 − sen x = 7?
Halle las derivadas de las siguientes funciones:: (sen x)/x, sen(1/x),x3x , y ln(sec x).
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
14 Tema 1. Repaso de matemáticas
1.6. Cálculo integral
La integración es la operación inversa de la derivación. Por ejemplo, conside-remos la siguiente expresión:
f (x) = dy
dx= 3ax2 +b
la cual es el resultado de derivar la función
y(x) = ax3 +bx + c .
Podemos escribir la ecuación anterior como dy = f (x)dx = (3ax2 +b)dx y ob-tener y(x) “sumando” todos los valores de x. Matemáticamente, escribimos estaoperación inversa como sigue:
y(x) =∫
f (x)dx . (1.88)
Para la función f (x) dada en el ejemplo anterior, tenemos
y(x) =∫
(3ax2 +b)dx = ax3 +bx + c
donde c es una constante de integración. Este tipo de integral se denomina inte-gral indefinida, dado que su valor depende de la elección que se haga de c.
Una integral indefinida I (x) se define, en general, como
I (x) =∫
f (x)dx . (1.89)
donde f (x) se denomina integrando y f (x) = dy(x)/dx.
Para una función continua cualquiera f (x), la integral se puede describir co-mo el área bajo la curva limitada por f (x) y el eje x entre dos valores especificadosde x, por ejemplo, x1 y x2, como se muestra en la figura.
El área del elemento en color azul es aproximadamente f (xi )∆xi . Si sumamostodos esos elementos desde x1 hasta x2 y calculamos el límite de esta suma cuan-do ∆xi → 0, obtenemos el área real bajo la curva limitada por f (x) y x entre loslimites x1 y x2:
Área = lım∆xi→0
=∑i
f (xi )∆xi =∫ x2
x1
f (x)dx = I (x2)− I (x1) . (1.90)
Las integrales del tipo definido por esta ecuación se denominan integralesdefinidas.
Una integral habitual que surge en situaciones prácticas es la siguiente:
I (x) =∫
xndx = xn+1
n +1+ c (x 6= −1) (1.91)
Este resultado es obvio, ya que la derivada del miembro derecho de la ecuacióncon respecto a x es f (x) = xn , como puede verificarse directamente. Si los límitesde integración son conocidos, esta integral se convierte una integral definida y seexpresa como sigue: ∫ x2
x1
xndx = xn+12 −xn+1
1
n +1(x 6= −1) (1.92)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.6. Cálculo integral 15
Integración por partes
En ocasiones, resulta útil aplicar el método de la integración por partes paracalcular ciertas integrales. El método utiliza la propiedad que establece que∫
udv = uv −∫
vdu (1.93)
donde u y v se eligen cuidadosamente de modo que sea posible reducir una in-tegral compleja a una integral más sencilla. En muchos casos, se realizan variasreducciones. Consideremos la función siguiente:
I (x) =∫
xex dx .
Esta integral se puede calcular integrando por partes. Seleccionamos u ≡ x y dv ≡ex dx, de modo que du = xdx y v = ex . Así,
I (x) =∫
xex dx = xex −∫
ex dx = xex −ex + c .
Es decir,
I (x) =∫
x2ex dx = x(ex −1)+ c .
Integración por sustitución
Otro método útil que debe recordarse es la integración por sustitución, en laque se realiza un cambio de variable. Por ejemplo, consideremos la siguiente in-tegral:
I (x) =∫
cos2 x sen xdx .
Esta integral es fácil de calcular si expresamos u = cos x, de modo que du =−sen xdx.La integral queda entonces del siguiente modo:
I (u) =−∫
u2du =−u3
3+C .
Deshaciendo el cambio de variables queda, finalmente,
I (x) =−cos3 x
3+ c .
Actividad 1.7: Halle la solución de las siguientes integrales:∫ 1
0cos3 x dx
∫ 1
0
x2
3x3 +1dx .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
16 Tema 1. Repaso de matemáticas
Integrales inmediatas
A continuación se enumeran algunas integrales indefinidas de utilidad (to-mando la constante de integración c igual a 0):∫
xn dx = xn+1
n +1si n 6= −1 (1.94)∫
1
xdx = ln x (1.95)∫
f ′(x)
f (x)dx = ln[ f (x)] (1.96)∫
eax dx = 1
aeax (1.97)∫
sen(ax)dx =− 1
acos(ax) (1.98)∫
cos(ax)dx = 1
asen(ax) (1.99)∫
tan(ax)dx =− 1
aln[cos(ax)] = 1
aln[sec(ax)] (1.100)∫
1
a2 +x2 dx = 1
aarctan
x
a(1.101)∫
1
a2 −x2 dx = 1
2aln
a +x
a −xsi a2 −x2 > 0 (1.102)∫
1
x2 −a2 dx = 1
2aln
x −a
x +asi x2 −a2 > 0 (1.103)∫
1pa2 −x2
dx = arcsenx
a=−arccos
x
asi a2 −x2 > 0 (1.104)
Actividad 1.8: Halle la solución de las siguientes integrales:∫f ′(x) f (x)dx∫ b
a f ′′(x) f ′(x)dx∫ π0 x sen x dx∫ ∞0
sen x
xdx .
1.7. Funciones de varias variables
Diferencial de funciones de una sola variable
Recordemos que para una función de una sola variable f = f (x), ya se definióla derivada de la función f (x) con respecto a x como
d f (x)
dx= lım∆x→0
f (x +∆x)− f (x)
∆x= lım∆x→0
∆ f
∆x. (1.105)
Geométricamente, esta derivada expresa el valor de la pendiente de la tangente ala curva f (x) en el punto x. El concepto de diferencial de f (x), denotado genéri-
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.7. Funciones de varias variables 17
camente como d f , expresa la variación infinitesimal de la función f (x) entre x yx +dx, esto es,
d f (x) = f (x +dx)− f (x) . (1.106)
Desde un punto de vista matemático, este diferencial viene dado por el siguienteproducto:
d f (x) =(
d f
dx
)dx . (1.107)
Debe recordarse nuevamente que d f /dx no expresa un cociente entre d f y dxsino que por el contrario debe entenderse como la acción del operador d/dx so-bre la función f (x). Este hecho se pone de manifiesto con otras notaciones queprefieren expresar la derivada de la función f (x) con respecto a x como Dx f (x),donde Dx ≡ d/dx es precisamente el operador derivada.
1.7.1. Teorema fundamental del cálculo
El teorema fundamental del cálculo establece la siguiente relación entre lasoperaciones de integración y diferenciación de la función f (x):∫ b
a
(d f
dx
)dx = f (b)− f (a) . (1.108)
Una posible manera de “deducir” la expresión anterior pasa por tener en cuenta
que d f (x) =(
d fdx
)dx, y por tanto
∫ b
ad f (x) = f (b)− f (a) . (1.109)
1.7.2. Diferencial y derivada parcial de una función devarias variables
Es muy frecuente que en la naturaleza las magnitudes dependan de más deuna variable, así la temperatura de una habitación depende de la posición delpunto donde se mide, esto es, de las tres coordenadas espaciales del punto. Estehecho se manifiesta matemáticamente diciendo que la temperatura es función dex, y y z y se denota como T = T (x, y, z).
Similarmente al concepto de derivada introducido en la sección anterior pa-ra funciones de una sola variable, puede ahora definirse el concepto de derivadaparcial. Esta derivada hace referencia a la variación de cierta función con respec-to a una sola de las variables cuando las demás permanecen constantes. Así, sedefine la derivada parcial de la función f (x, y, z) con respecto a x como
∂ f
∂x= lım∆x→0
f (x +∆x, y, z)− f (x, y, z)
∆x(1.110)
y análogamente para las restantes variables. A partir del concepto de derivadaparcial, puede deducirse que una variación infinitesimal de la función f (x, y, z)cuando dicha función varía entre los puntos x y x +dx podrá expresarse como
d f∣∣
x =(∂ f
∂x
)dx . (1.111)
La variación infinitesimal de la función f (x, y, z) cuando ésta varía entre los pun-tos (x, y, z) y (x+dx, y+dy, z+dz) podría obtenerse, por tanto, sumando las varia-ciones parciales a lo largo de cada una de las coordenadas. De este modo, puede
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
18 Tema 1. Repaso de matemáticas
escribirse que
d f =(∂ f
∂x
)dx +
(∂ f
∂y
)dy +
(∂ f
∂z
)dz . (1.112)
Actividad 1.9:
Escriba el diferencial de la siguiente función: x(t ) = 3t 2 +9t −5.
• ¿Varía dx con t?
• Exprese en palabras el significado de dx supuesto que x(t ) repre-sente la posición en el tiempo de una partícula que se mueve a lolargo del eje x.
Encuentre una integral definida (tanto el integrando como los límitesde integración) cuya solución sea sen(π/3)−cos(π/3)+1.
Obtenga el diferencial de la siguiente función: x(u, v) = u2v − v2 +v sen(u).
Si la temperatura en grados centígrados de una habitación viene dadapor T (x, y, z) = x2+ y2+20, exprese en palabras el significado de dichafunción.
• ¿Qué significa que ∂T /∂x ∝ x?
• ¿Qué implica que ∂T /∂z = 0?
1.8. Álgebra vectorial
1.8.1. Vectores
En la naturaleza existen magnitudes físicas que están completamente deter-minadas por su valor y sus unidades. De forma genérica puede decirse que estasmagnitudes son escalares. Ejemplos de estas magnitudes son la masa, la distan-cia, la temperatura, etc. Por el contrario, existen otras magnitudes que ademásde su valor y unidades están “dotadas” de una propiedad adicional: su dirección.Este tipo de magnitudes se conocen con el nombre de magnitudes vectoriales eincluyen a magnitudes tales como la posición, la velocidad, la fuerza, el campoeléctrico, etc. Para expresar las magnitudes vectoriales se hace uso de los vectoresy por tanto se hace imprescindible el álgebra de vectores.
Notación vectorial
Usualmente las magnitudes vectoriales suelen denotarse en los textos impre-sos mediante letras minúsculas o mayúsculas en tipo negrita, v,V, dejándose usual-mente la notación con una flecha/raya encima de dichas letras, ~v ,~V , para la es-critura manual de los mismos. No obstante en el texto de estos apuntes, con laidea de evidenciar más si cabe el caracter vectorial de las magnitudes, usaremosla notación con una flechita encima de las variables. En las figuras aparecerán amenudo los vectores denotados en tipo negrita.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.8. Álgebra vectorial 19
Para expresar que cierta magnitud es vectorial se pueden usar varios tipos denotación. A continuación destacamos las más usadas:
x
y
z
v
vz
vx
vy
Mediante una terna de números que son las componentes del vector en losejes cartesianos x, y, z:
~v = (vx , vy , vz ) . (1.113)
Geométricamente, las componentes cartesianas del vector pueden identifi-carse con las proyecciones de este vector a lo largo de los ejes cartesianos.
El vector~v puede también expresarse en función de su módulo y de su vectorunitario. El módulo del vector ~u suele denotarse como v o bien |~v | y vienedado según el teorema de Pitágoras por
v
v^
|~v | ≡ v =√
v2x + v2
y + v2z . (1.114)
El vector unitario asociado con el vector ~v se define como aquel vector de
Módulo del vector ~v
módulo unidad que tiene la misma dirección y sentido que ~v . Dicho vectorse denotará de forma genérica como v o bien como ~v , pudiéndose expresarcomo
v = ~vv= (vx , vy , vz )√
v2x + v2
y + v2z
. (1.115)
Obviamente el vector ~v puede escribirse como: ~v = v v.
Vector unitario de ~v
Expresando el vector como suma de las componentes del vector por los vecto-res unitarios a lo largo de los ejes coordenados. Los vectoresunitarios a lo largo
x
y
z
v
de los ejes x, y, z se denotaran como x, y, z respectivamente. Otras notacionesfrecuentes para estos vectores unitarios son i, j,k o bien ex ,ey ,ez . Usando estanotación, el vector ~v se escribirá como:
~v = vx x+ vy y+ vz z . (1.116)
1.8.2. Suma de vectores
La suma de vectores se realiza sumando sus componentes. De este modo si
a
bc
~a = ax x+ay y+az z
~b = bx x+by y+bz z ,
el vector~c suma de los dos anteriores será por tanto:
~c =~a +~b= (ax +bx )x+ (ay +by )y+ (az +bz )z . (1.117)
1.8.3. Producto escalar
El producto escalar de dos vectores ~a y ~b, denotado como ~a ·~b es un escalarfruto de la siguiente operación:
~a ·~b = ax bx +ay by +az bz (1.118)
= ab cosα , (1.119)
siendo α el ángulo formado por los dos vectores (es independiente si este ángulose mide en dirección horaria o antihoraria ya que cos(π−α) = cosα). El producto
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
20 Tema 1. Repaso de matemáticas
escalar ~a ·~b puede interpretarse geométricamente como la proyección de uno delos vectores sobre el otro (salvo factores numéricos). Este hecho se manifiesta cla-ramente en el producto escalar de ~a por uno de los vectores unitarios según losejes coordenados, esto es,
~a · x = ax ,
donde se ve claramente que ~a · x es justamente la proyección del vector ~a sobre eleje x.
Algunas de las propiedades del producto escalar son:
El producto escalar es conmutativo:
~a ·~b =~b ·~a . (1.120)
El producto escalar es distributivo respecto a la suma de vectores:
~a · (~b +~c) =~a ·~b +~a ·~c . (1.121)
El producto escalar de dos vectores perpendiculares es nulo:
~a ·~b = 0 ⇒ ~a ⊥~b . (1.122)
El producto escalar de un vector por sí mismo es igual al cuadrado del módulode dicho vector:
~a ·~a = a2 . (1.123)
1.8.4. Producto vectorial
El producto vectorial de dos vectores ~a y~b, denotado como ~a ×~b, es un vectordefinido como
~a ×~b = ab senα n , (1.124)
siendo α el ángulo más pequeño formado por los dos vectores y n el vector unita-rio normal exterior al plano que contiene a los vectores ~a y~b. Puesto que el planotiene dos normales (cada una con distinto sentido), el vector n que aparece en(1.124) siempre se refiere a la normal que apunta según la regla de la mano dere-cha. Esta regla dice que usando la mano derecha y apuntando el dedo índice enla dirección de ~a y el dedo corazón en la de~b, el dedo pulgar indicará la direcciónde n.1 Geométricamente, el módulo del producto vectorial, |~a×~b|, es igual al áreadel paralelogramo generado por los vectores ~a y~b.
A partir de la definición del producto vectorial (1.124) pueden deducirse lassiguientes propiedades:
El producto vectorial es anticonmutativo:
~a ×~b =−~b ×~a . (1.125)
El producto vectorial es distributivo respecto a la suma de vectores:
~a × (~b +~c) =~a ×~b +~a ×~c . (1.126)
1 Esta regla también se conoce a veces como regla del tornillo cuando dice que considerando el giroque va desde ~a hasta ~b por el camino más corto, si este giro se aplica a un tornillo, el sentido deavance o retroceso del tornillo indica hacia donde se dirige la normal.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.8. Álgebra vectorial 21
El producto vectorial de dos vectores paralelos es nulo:
~a ×~b = 0 ⇒ ~a ∥~b . (1.127)
Multiplicación por un escalar α:
α(~a ×~b) =α~a ×~b =~a ×α~b . (1.128)
Teniendo en cuenta la definición (1.124) y las propiedades (1.125)–(1.127), elproducto vectorial de ~a por~b puede obtenerse como
~a ×~b = (ax x+ay y+az z)× (bx x+by y+bz z) == (ay bz −az by )x+ (az bx −ax bz )y+ (ax by −ay bx )z . (1.129)
Usando la definición del determinante, la expresión anterior puede escribirse co-mo
~a ×~b =∣∣∣∣∣∣
x y zax ay az
bx by bz
∣∣∣∣∣∣ . (1.130)
1.8.5. Productos triples
Dado que el producto vectorial de dos vectores es otro vector, este vector pue-de a su vez multiplicarse escalar o vectorialmente para formar lo que se conocecomo productos triples.
Producto triple escalar: ~a · (~b ×~c).Desde un punto de vista geométrico, este producto triple escalar puede inter-
c
a
b
pretarse como el volumen del paralelepípedo generado por los tres vectores~a,~b y~c dado que según la figura adjunta |~b ×~c| es el área de la base y |a cosα| esla altura (α es el ángulo entre~a y~b×~c). Usando esta interpretación geométricaes fácil deducir que
~a · (~b ×~c) =~b · (~c ×~a) =~c · (~a ×~b) . (1.131)
Es interesante notar que en la expresión anterior se ha preservado el “ordenalfabético”.
El productor triple escalar puede también obtenerse a partir del siguiente de-terminante:
~a · (~b ×~c) =∣∣∣∣∣∣
ax ay az
bx by bz
cx cy cz
∣∣∣∣∣∣ . (1.132)
Producto triple vectorial: ~a × (~b ×~c).Este producto triple vectorial puede también obtenerse como
~a × (~b ×~c) =~b(~a ·~c)−~c(~a ·~b) . (1.133)
Nótese que el vector
(~a ×~b)×~c =−~c × (~a ×~b) =−~a(~b ·~c)+~b(~a ·~c) (1.134)
es un vector completamente diferente al definido en la expresión (1.133).
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
22 Tema 1. Repaso de matemáticas
Actividad 1.10:
Sean los siguientes puntos: A(0,0), B(1,−1), C (1,1) y D(2,0). Halle los
vectores−→AB y
−−→C D y represéntelos gráficamente. Entre las posibles con-
clusiones que pudiera extraer del anterior cálculo, ¿podría decir queexiste algo así como un “punto donde empieza el vector” en la propiadefinición del vector?
Halle el módulo y el vector unitario de ~a = 3x − 7y + z y también de~r (t ) = 3t 2x+ y− t 3z.
Halle las componentes del vector~b(t ) cuyo módulo es b(t ) = 9t 2 y suvector unitario b(t ) = (3t x+5z)/
p9t 2 +25.
¿Puede la proyección del vector unitario a sobre otro vector unitario btener como valor 1.7? Explique las razones.
Encuentre los vectores del plano que son ortogonales a ~a = ax x+ay y.
Repita el cálculo anterior para el vector~b = bx x+by y+bz z. Describalas posibles conclusiones que haya podido extraer de estos cálculos.
Usando las propiedades de la suma de vectores y de su producto esca-lar, deduzca las relaciones (1.43)-(1.45).
Halle los vectores que son ortogonales al plano definido por los si-guientes tres puntos: A(0,2,1), B(1,−1,0), y C (2,1,1).
¿Cuál es la distancia mínina desde el punto D(3,3,3) al plano descritoen el punto anterior?
1.9. Cálculo vectorial
En este apartado extenderemos los conceptos de derivada, diferencial, e inte-gración al caso de magnitudes vectoriales.
1.9.1. Operador gradiente
Si tenemos una función escalar de varias variables, f (x, y, z), ya vimos en laexpresión (1.112) que el diferencial de dicha función, d f , puede expresarse comoel siguiente producto escalar:
d f =(∂ f
∂x,∂ f
∂y,∂ f
∂z
)· (dx,dy,dz) . (1.135)
Definiendo el operador vectorial~∇ como
Operador ~∇ ~∇≡(∂
∂x,∂
∂y,∂
∂z
)(1.136)
≡ x∂
∂x+ y
∂
∂y+ z
∂
∂z, (1.137)
al aplicarlo a la función f (x, y, z) se obtiene el gradiente de f ,~∇ f , que es eviden-
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.9. Cálculo vectorial 23
temente una magnitud vectorial:
~∇ f (x, y, z) =(∂ f
∂x,∂ f
∂y,∂ f
∂z
)(1.138)
= ∂ f
∂xx+ ∂ f
∂yy+ ∂ f
∂zz . (1.139)
Esta definición permite escribir el diferencial de la función f como el siguiente
Definición de gradiente de f
producto escalar:
d f =~∇ f ·d~r , (1.140)
donde d~r = (dx,dy,dz).
Usando la definición de producto escalar, d f también puede escribirse como
d f = |~∇ f | |d~r | cosα , (1.141)
lo que permite deducir que la máxima variación de la función f (x, y, z) se producecuando α= 0, esto es, cuando d~r es paralelo al gradiente de f ,~∇ f . Consecuente-mente, la dirección del vector ~∇ f marca la dirección de máxima variación de lafunción en el punto (x, y, z).
Actividad 1.11:
Halle la expresión de~∇ f y d f para f (x, y, z) = x y2 + z3.
Obtenga el vector unitario asociado con la dirección de máxima varia-ción de la función anterior.
1.9.2. Integral de camino
Dado un campo vectorial ~F (esto es, una magnitud vectorial cuyas componen-tes dependen de la posición espacial), la integral de camino de ~F entre dos puntosA y B a lo largo de la curva Γ se define como la siguiente integral:
C BA =
∫ B
A,Γ
~F ·d~l
= lımPi+1→Pi (Γ)
∑i
~F (Pi ) ·Pi Pi+1 . (1.142)
La integral anterior puede interpretarse como la superposición infinitesimal delproducto escalar ~F ·d~l para cada elemento diferencial de la curva Γ entre los pun-tos A y B . El vector d~l es un vector que tiene por módulo la longitud de un ele-mento diferencial de la curva y por dirección la de la recta tangente a la curva endicho punto. Las integrales de camino son muy usuales en Física, definiendo, por
A
B
F
dl
ejemplo, el trabajo que realiza cierta fuerza entre dos puntos a través de cierta tra-yectoria. En general, la integral de camino depende del camino que se elija para irdesde A hasta B .
Algunas de las propiedades más importantes de las integrales de camino son:
∫ B
A,Γ
~F ·d~l =−∫ A
B ,Γ
~F ·d~l .
Si A′ es un punto intermedio de la curva Γ entre A y B , se tiene que∫ B
A,Γ
~F ·d~l =∫ A′
A,Γ
~F ·d~l +∫ B
A′,Γ~F ·d~l .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
24 Tema 1. Repaso de matemáticas
Actividad 1.12:
Cierta fuerza puede expresarse como ~F = x3 y x− z2y. Halle el traba-jo hecho por esta fuerza para trasladar una partícula desde el puntoA(0,1,0) hasta el punto B(3,1,0) siguiendo una trayectoria recta para-lela al eje x.
1.9.3. Teorema fundamental del gradiente
De forma similar a como se hizo para funciones de una sola variable en (1.108),se verifica que ∫ B
A
~∇ f ·d~l = f (B)− f (A) , (1.143)
donde la integral en la expresión anterior es una integral de camino.
La expresión (1.143) puede “justificarse” considerando la definición del dife-rencial de f dada por (1.140). A partir de esta definición, la integral en (1.143)puede verse como una superposición infinitesimal de las variaciones de la fun-ción entre los puntos A y B , y esto es precisamente f (B)− f (A).
Dos importantes corolarios se pueden extraer de la expresión (1.143) son
1. ∫ B
A,Γ
~∇ f ·d~l =∫ B
A,γ
~∇ f ·d~l , (1.144)
esto es,∫ B
A~∇ f ·d~l es independiente del camino tomado entre los puntos A y B .
Debe notarse que, en general, la integral de camino C BA = ∫ B
A,Γ~F ·d~l sí depende
del camino (considérese, por ejemplo, el trabajo realizado por un coche paradesplazarse entre dos puntos siguiendo distintas carreteras).
2. ∮Γ
~∇ f ·d~l = 0 . (1.145)
La integral de camino anterior a través de cualquier curva cerrada, Γ, es nula.
Actividad 1.13: La fuerza gravitatoria (o peso), ~P , puede expresarse como~F = −~∇Ep (y), donde Ep (y) = mg (y − y0), g = 10m/s2 y y0 es un nivel dereferencia constante.
Para una partícula de masa m = 2kg, obtenga el valor de la integral decamino C B
A = ∫ BA,Γ~P ·d~l siendo A(2,3,0)m y B(1,0,0)m.
¿Depende la anterior integral (es decir, el trabajo hecho por el peso) delcamino seguido para ir desde A hasta B? Encuentre una explicaciónpara ello.
Sin hacer ningún cálculo, deduzca el valor del trabajo de la fuerza gra-vitacional necesaria para trasladar la anterior partícula entre los pun-tos A(2,3,0)m y B(1,3,−5)m, y también entre el punto A(2,3,0)m y élmismo tras recorrer una trayectoria cerrada.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.10. Aspectos generales de funciones armónicas 25
1.9.4. Integral de flujo
Una integral muy útil que aparece en Física es la integral de flujo. El flujo de uncampo vectorial ~A a través de una superficie S se define como la siguiente integralde superficie:
Φ=∫
S
~A ·d~S , (1.146)
donde S es una superficie arbitraria y d~S es el vector diferencial de superficie, de-finido como
d~S = dS n , (1.147)
que tiene por módulo el área del elemento diferencial y por dirección y sentido eldel vector unitario normal exterior a la superficie, n. Por ejemplo, para el caso delplano z = Cte, el diferencial de superficie será d~S = dxdy z.
1.10. Aspectos generales de funciones armónicas
Una función armónica f (t ) es aquella que varía en el tiempo de la forma ge-nérica:
f (t ) = A cos(ωt +ϕ) , (1.148)
donde A es la amplitud, ω la frecuencia angular y ϕ el desfase. La amplitud, A,determina el rango de variación de la señal, esto es
−A ≤ f (t ) ≤ A .
La frecuencia angular está relacionada con la frecuencia f a través de
ω= 2π f = 2π
T, (1.149)
donde T el periodo de la señal, esto es, aquel valor tal que f (t ) = f (t +T ). El des-fase ϕ determina el origen del tiempo, esto es, cuál es el valor de la función en elinstante t = 0:
f (0) = A cosϕ .
Es interesante recordar algunas relaciones trigonométricas de las funcionesseno o coseno, a saber:
sen(a ±b) = sen a cosb ±cos a senb
cos(a ±b) = cos a cosb ∓ sen a senb ,
de donde puede deducirse, por ejemplo, que
cos(ωt +ϕ−π/2) = sen(ωt +ϕ) . (1.150)
Actividad 1.14:
Obtenga la amplitud, el periodo, la fase inicial y la frecuencia angu-lar de la función armónica f (t ) = 3sen(100πt ). Previamente escriba laanterior función en la forma general dada en (1.148).
Dadas dos funciones armónicas de la misma frecuencia: f (t ) =5cos(100πt ) y g (t ) = −5sen(100πt ), halle su función suma. ¿Cuál esla frecuencia de la función resultante? ¿Qué ocurriría si la frecuenciaangular de las funciones que se suman no es la misma?.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
26 Tema 1. Repaso de matemáticas
1.11. Análisis fasorial
En la resolución de ecuaciones de segundo grado, es frecuente encontrarsecon soluciones que implican tomar la raíz cuadrada de un negativo, por ejemplop−9. No obstante, es fácil notar que no existe ningún número real (esto es, quepertenezca al conjunto R) tal que su cuadrado sea −9. Para solucionar esta cues-tión se introducen los números imaginarios, que pueden formarse a partir de ladefinición de la unidad imaginaria, j:
j =p−1 , (1.151)
de modo que p−9 =p−1×9 =p−1×p9 = j3 .
Los números que tienen tanto parte real como imaginaria se conocen como nú-meros complejos y pueden definirse como
z = a + jb , (1.152)
donde a = Re(z) se dice que es la parte real de z y b = Im(z) la parte imaginariade z.
Usualmente los números complejos se representan en un plano de modo quesobre el eje vertical se sitúa el eje imaginario y sobre el eje horizontal el eje real.De este modo, el número z queda caracterizado por un punto (como se muestraen la figura adjunta) que está a una distancia |z| dada por
|z| =√
a2 +b2 , (1.153)
que se conoce como módulo de z, y con un ángulo ϕ medido en sentido antiho-rario a partir del eje real dado por
ϕ= arctan
(b
a
), (1.154)
que se denomina argumento de z.
Es fácil observar en la figura que z puede escribirse como
z = |z|(cosϕ+ jsenϕ) ,
y dado que la identidad de Euler dice que
ejϕ = cosϕ+ jsenϕ , (1.155)
se tiene que el número complejo z puede reescribirse como
z = |z|ejϕ . (1.156)
Actividad 1.15:
Escriba en forma polar los siguientes números complejos dados enforma binómica: z1 = 3, z2 = −3, z3 = j, z4 = −j, z5 = 1+ j, z6 = 1− j,z7 = −1+ j, y z8 = −1− j. [Se recomienda representar gráficamente losnúmeros anteriores en el plano complejo.]
Escriba en forma binómica los siguientes números complejos: z1 =e−jπ, z2 = ejπ/4, z3 = 7e−jπ/2, z4 = 2ejπ/3, z5 = 3e−j3π/4, z6 = 3ej3π/4, yz7 = 0ejπ/2.
Sea z1 = 1− j y z2 = 2e jπ/4, obtenga el resultado de las siguientes ope-raciones: z1 − z2, z1z2, z1/z2, z4
1 ,p
z2, y ln z2.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.11. Análisis fasorial 27
Teniendo en cuenta la identidad(1.155), es fácil notar que la función armónica
f (t ) = A cos(ωt +ϕ)
puede escribirse como
f (t ) = Re(
Aej(ωt+ϕ))= Re(
Aejϕejωt ) . (1.157)
Si ahora definimos el fasor, f , de la función f (t ) como
f = Aejϕ , (1.158)
se tiene quef (t ) = Re
(f ejωt ) . (1.159)
La identidad (1.159) permite establecer una relación biunívoca entre las fun-ciones armónicas y sus fasores asociados, de modo que a toda función armónicase le puede asociar un fasor, esto es,
f (t ) ↔ f . (1.160)
Siguiendo las propiedades más elementales del cálculo de números complejospueden demostrarse fácilmente las siguientes propiedades:
f1(t )+ f2(t ) ↔ f1 + f2 (1.161)
α f (t ) ↔ α f , (1.162)
siendo fi (t ) = Ai cos(ωt +ϕi ) y α un número real.
Una propiedad adicional de fundamental importancia práctica es
d f (t )
dt↔ jω f . (1.163)
Esta última propiedad puede deducirse como sigue:
d f (t )
dt=−ωA sen(ωt +ϕ) =−ωA cos(ωt +ϕ−π/2)
=Re(−ωAej(ωt+ϕ−π/2))= Re
(−ωAejϕe−jπ/2ejωt )=Re
(jωAejϕe jωt )= Re
(jω f ejωt ) , (1.164)
de donde se deduce que el fasor asociado a d f /dt es precisamente jω f .
Actividad 1.16:
Halle los fasores asociados (en forma binómica) a las siguientes fun-ciones armónicas: f1(t ) = −5cos(πt ), f2(t ) = −5cos(2πt ), f3(t ) =−5cos(2πt + π/6), f4(t ) = −5sen(πt ), f5(t ) = −5sen(2πt ), y f6(t ) =−5sen(2πt +π/6).
Escriba las funciones armónicas de periodo T = 1/50s asociadas a lossiguientes fasores: z1 = e−jπ, z2 = ejπ/4, z3 = 7e−jπ/2, z4 = 2ejπ/3, z5 =3e−j3π/4, z6 = 3ej3π/4, y z7 = 0ejπ/2.
Dados los fasores f1 = 1 − j y f2 = 2e jπ/4 asociados con las funcio-nes armónicas f1(t ) y f2(t ) de frecuencia f = 50Hz, halle las funcio-nes armónicas resultantes de las siguientes operaciones: f1(t )− f2(t ),3 f1(t )+2 f2(t ) y 3 f ′
1(t )+2 f2(t ).
Para el caso anterior ¿puede encontrarse el resultado de f1(t ) f2(t ) par-tiendo de sus fasores asociados?
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
28 Tema 1. Repaso de matemáticas
1.12. Problemas propuestos
1. Escriba la expresión de
a) la longitud y el área de una circunferencia de radio R,
b) el volumen de una esfera de radio R,
c) el área y el volumen de un cilindro de radio R y altura h,
d) el área y el volumen de una pirámide de base cuadrada de lado a y altura h.
2. Escriba la expresión matemática de cos(2α),sen(2α),sen2(α) y cos2(α) en función de cos(α) ysen(α).
3. Dados los siguientes planos:
π≡ 2x +2y − z −2 = 0 π′ ≡ x −2y +2z +4 = 0
a) Obtener la ecuación de la recta que determinan.
b) Hallar todos los puntos que equidistan de π y π′.
4. Dados los puntos A(1,−1,2), B(2,0,−1), C (0,1,3), se pide:
a) Hallar todos los puntos que equidistan de A,B y C .
b) ¿Cuáles de ellos pertenecen al plano 2x +2y +2z +1 = 0?
c) Hallar la ecuación del plano que pasa por A,B y C .
5. Dado el sistema de ecuaciones
x + y +2z = 2
−3x +2y +3z =−2
2x +my −5z =−4
a) Discutir el sistema según los valores de m.
b) Resolverlo para m = 1.
6. a) Hallar el valor de λ para que sea continua la siguiente función:
f (x) =
eλx2 −1
3x2si x > 0
sen(2x)
xsi x ≤ 0 .
b) Representar la anterior función en el intervalo −10 < x < 10.
7. Dado el polinomio P (x) = x3 +ax2 +bx + c, obtener los valores de a,b y c para que se verifiquenlas siguientes condiciones:
a) El polinomio P (x) tenga extremos relativos en los puntos de abscisas x =−1/3, x =−1.
b) La recta tangente a la gráfica de P (x) en el punto (0,P (0)) sea y = x +3.
8. Calcular las derivadas de las siguientes funciones:
a) (3t 2 −1)cos(4t )
b)ez2
z6 −cos2 z
c) 5x3x ln(x)
9. Sabiendo que la función F (x) tiene derivada f (x) continua en el intervalo cerrado [2,5] y queF (2) = 1, F (3) = 2, F (4) = 6, F (5) = 3, f (3) = 3 y f (4) =−1; hallar:
a)∫ 5
2 f (x)dx
b)∫ 3
2 [5 f (x)−7]dx
c)∫ 4
2 F (x) f (x)dx
10. Calcular las primitivas de las siguientes integrales:
a)∫
cos2(ωt )dt
b)∫
sen3(2y)dy
c)∫ dz
z4 −1
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
1.12. Problemas propuestos 29
d)∫
x2 ln2(x)dx
e)∫
ue−3u du
11. Recordando que ejα = cos(α)+ jsen(α), siendo j = p−1 la unidad imaginaria, escriba en formabinómica y polar el resultado de las siguientes operaciones con números complejos:
a) ejπ/4 −7j3
b) (4+ j)(2−5j)
c)(3+2j)2
4−5j
d) [e(2+jπ/3)]4
12. Expresar el vector (9, 8) como combinación lineal de los vectores (3, 1) y (1, 2) y representar gráfi-camente el resultado.Sol.: (9, 8)=2(3, 1)+ 3(1, 2).
13. Encontrar el unitario en la dirección dada por los puntos de coordenadas (3,2,0) y (6,8,2).Sol.: n=(3/7, 6/7, 2/7).
14. Calcular el vector unitario perpendicular al plano determinado por los puntos (0,0,0), (1,2,3) y(3,3,1).Sol.: (−7,8,−3)/
p122
15. Encontrar el ángulo formado por los vectores (3,6,2) y (8,6,0) utilizando dos técnicas diferentes(producto escalar y vectorial).Sol.: α= 31.003o .
16. Utilizando el concepto de producto vectorial, determinar el área del triángulo cuyos vértices sonlos puntos de coordenadas (1,0,0), (4,5,2) y (3,1,2).Sol.: Área=
p117/2.
17. Encontrar los vectores unitarios radial (r) y tangente (t) en los puntos (x, y) de una circunferenciade radio R que se halla en el plano XY y tiene su centro en el origen de coordenadas. Repetir loanterior suponiendo ahora que la circunferencia tiene su centro en el punto (3,2).Sol.: centro en (0,0): r = (x/R, y/R), t = (−y/R, x/R);
centro en (3,2): r = ((x −3)/R, (y −2)/R), t = (−(y −2)/R, (x −3)/R).
18. Indicar cuales de las siguientes expresiones tienen sentido y cuales no:a) (~a ·~b) ·~c; b) ~a · (~b ×~c); c) ~a(~b ·~c); d) (~a ·~b)×~c.Sol.: correctas: b), c); incorrectas: a) y d) .
19. Utilizando el hecho de que |~a| =p~a ·~a, demostrar que
|~a +~b| =√|~a|2 +|~b|2 +2~a ·~b .
20. Encontrar la componente del vector (7,5,2) en la dirección dada por la recta que une los puntos(5,4,3) y (2,1,2).Sol.: (6,6,2).
21. Descomponer el vector ~A = (1,5,5) en sus componentes paralela y perpendicular a la direccióndada por el unitario n=(0, 3/5, 4/5).Sol.: ~A = ~A∥+~A⊥, siendo ~A∥=(0, 3/5, 4/5) y ~A⊥=(1, 21/5, 28/5).
22. Las coordenadas de una partícula móvil de masa m = 2 kg en función del tiempo son ~r (t ) =(3t , t 2, t 3) m (t en segundos). Determinar: a) la velocidad y aceleración de la partícula; b) la fuerzaque actúa sobre la misma en el instante t = 1 s, así como las componentes de dicha fuerza en ladirección perpendicular y tangente a la trayectoria.Sol.: a) ~v(t ) = (3,2t ,3t 2) m/s, ~a(t ) = (0,2,6t ) m/s2; b) ~F = (0,4,12) N; ~F⊥ = (−6,0,6) N, y ~F∥ =(6,4,6) N.
23. Calcule el gradiente de la función φ(x, y, z) = 2x y/r , siendo r =√
x2 + y2 + z2.
Sol.~∇φ= r−3 [2y(r 2 −x2)x+2x(r 2 − y2)y−2x y zz
]
JCM,FLML Apuntes de Física 1

CopiaUso
Académico

CopiaUso
Académico
TEMA 2
Cinemática de la partícula
2.1. Introducción
Movidos por nuestra curiosidad, desde antaño la especie humana ha buscadolos principios fundamentales y universales que gobiernan las causas y los efectosen los fenómenos observables del universo. Este procedimiento de búsqueda es loque se denomina ciencia, siendo el método científico el acto de construir, probary relacionar modelos con el objetivo de describir, explicar y predecir la realidad.Toda esta metodología implica el establecimeinto de hipótesis, la realización deexperimentos que se puedan repetir y observar y la formulación de nuevas hipó-tesis. Esencial para determinar el valor de un modelo científico es su simplicidady su utilidad para elaborar predicciones o para explicar observaciones referidas aun amplio espectro de fenómenos.
Podemos definir la física como la ciencia que estudia la materia y la energía asícomo el espacio y el tiempo. Sus objetos de interés son los principios que determi-nan el movimiento de las partículas y las ondas, las interacciones de la partículasy las propiedades de las moléculas, los átomos y los núcleos atómicos, así comolos sistemas de mayor escala, como los gases, los líquidos y los sólidos. La físicapodría considerarse como la rama de la ciencia más fundamental dado que susprincipios sirven como base para otros campos científicos como la química, labiología, la geología, etc.
El presente curso de física empezará con el estudio de la mecánica. Esta ramade la física trata sobre el movimiento de los cuerpos. El movimiento puede estu-diarse desde el punto de vista cinemático y dinámico. En el primer modelo se des-cribe el movimiento en sí mismo; en el segundo, se investigan las relaciones queexisten entre el movimiento de los cuerpos y las causas que lo producen. Dentrode este último apartado, la estática establece, como caso particular, las condicio-nes de equilibrio de los cuerpos. La mecánica es la más antigua de las ramas dela física y también la más elaborada. Sus modelos se han levado a otros campos,incluso fuera de la física. De ahí su interés como fundamento para entender otrasparcelas científicas.
En el presente tema estudiaremos la cinemática de una partícula y dejaremosel estudio de la dinámica para el próximo tema. Además, empezaremos el temacon una introducción al concepto de las magnitudes físicas que intervienen enmecánica, antes de abordar el estudio de la cinemática propiamente dicha.
31

CopiaUso
Académico
32 Tema 2. Cinemática de la partícula
2.2. Magnitudes Físicas. Unidades
Comenzaremos nuestro estudio de la mecánica estableciendo unas pocas de-finiciones básicas, introduciendo las unidades y mostrando cómo estas unidadesse tratan en las ecuaciones.
La medida de toda magnitud física exige compararla con cierto valor unita-rio de la misma. Así, para medir la distancia entre dos puntos, la comparamoscon una unidad estándar de distancia tal como el metro. La afirmación de queuna cierta distancia es de 25 metros significa que equivale a 25 veces la longitudde la unidad metro; es decir, una regla métrica patrón se ajusta 25 veces en dichadistancia. Es importante añadir la unidad metros junto con el número 25 al expre-sar una distancia debido a que existen otras unidades de longitud de uso común.Decir que una distancia es 25 carece de significado. Toda magnitud física debeexpresarse con una cifra y una unidad.
2.2.1. El Sistema Internacional de unidades
Todas las magnitudes físicas pueden expresarse en función de un pequeño nú-mero de unidades fundamentales. Muchas de las magnitudes que se estudiaránen mecánica, tales como velocidad, fuerza, trabajo o energía, pueden expresarseen función de tres magnitudes fundamentales: longitud, tiempo y masa. La se-lección de las unidades patrón o estándar para estas magnitudes fundamentalesdetermina un sistema de unidades. El sistema utilizado universalmente en la co-munidad científica es el Sistema Internacional (S.I.). En el S.I. la unidad patrón delongitud es el metro, la unidad patrón de tiempo es el segundo y la unidad patrónde la masa es el kilogramo. Damos a continuación la definición de las unidadespatrón de cada una de las magnitudes fundamentales:
Longitud: La unidad patrón de longitud, el metro (símbolo m) estaba defini-da originalmente por la distancia comprendida entre dos rayas grabadas sobreuna barra de una aleación de platino e iridio que se guarda en la Oficina In-ternacional de Pesas y Medidas, en Sèvres (Francia). Se escogió esta longitudde modo que la distancia entre el Ecuador y el Polo Norte a lo largo del meri-diano que pasa por París fuese igual a 10 millones de metros. El metro patrónse define hoy día como la distancia recorrida por la luz en el vació durante untiempo de 1/299792458 segundos. Esto supone que la velocidad de la luz esexactamente 299.792.458 metros por segundo.
Tiempo: La unidad de tiempo, el segundo (símbolo s) se definió originalmenteen función de la rotación de la Tierra, de modo que correspondía a 1/86400 deldía solar medio. Actualmente se define en función de una frecuencia caracte-rística asociada con el átomo de Cesio. Todos los átomos, después de absorberenergía, emiten luz con longitudes de onda y frecuencias características delelemento considerado. Existe una frecuencia y una longitud de onda particu-lares asociadas a cada transición energética dentro del átomo de un elementoy todas las experiencias manifiestan que estas magnitudes son constantes. Elsegundo se define como la frecuencia de la luz emitida en una determinadatransición del Cesio es de 9.192.631.770 ciclos por segundo. Con estas defini-ciones, las unidades fundamentales de longitud y de tiempo son accesibles acualquier laboratorio del mundo.
Masa: La unidad de masa, el kilogramo (símbolo kg), igual a 1000 gramos (g),se define de modo que corresponde a la masa de un cuerpo patrón concre-to, también conservado en Sèvres. Estudiaremos con más detalle el concepto
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.2. Magnitudes Físicas. Unidades 33
de masa en el capítulo siguiente. Como veremos, el peso de un objeto en unpunto determinado de la tierra es proporcional a su masa. Así, las masas detamaño ordinario pueden compararse a partir de su peso.
Al estudiar electricidad y termodinámica necesitaremos otras tres unidadesfísicas fundamentales: la unidad de corriente eléctrica, el amperio (A); la unidadde temperatura, el kelvin (K) y la unidad de cantidad de materia, el mol. Existeotra unidad fundamental, la candela (cd), unidad de intensidad luminosa, que notendremos ocasión de utilizar durante este curso. Estas siete unidades fundamen-tales constituyen el Sistema Internacional de unidades.
La unidad de cualquier magnitud física puede expresarse en función de es-tas unidades del S.I. fundamentales. Algunas combinaciones importantes recibennombres especiales. Por ejemplo, la unidad S.I. de fuerza, kg·m/s2 se denominanewton (N). Análogamente, la unidad S.I. de potencia, kg·m2/s3 se denomina va-tio (W). En la Tabla 2.1 se relaciona los prefijos de los múltiplos y submúltiplosmás corrientes de las unidades del S.I. Estos múltiplos son todos potencias de 10y un sistema así se denomina sistema decimal; el sistema decimal basado en elmetro se llama sistema métrico. Los prefijos pueden aplicarse a cualquier unidaddel S.I., por ejemplo, 0,001 segundos es un milisegundo (ms); 1.000.000 de watioses un megawatio (MW).
Múltiplo Prefijo Abreviatura Múltiplo Prefijo Abreviatura1018 exa E 10−18 atto a1015 peta P 10−15 femto f1012 tera T 10−12 pico p109 giga G 10−9 nano n106 mega M 10−6 micro µ
103 kilo k 10−3 mili m102 hecto h 10−2 centi c101 deca da 10−1 deci d
Cuadro 2.1: Prefijos de las potencias de 10.
Como último comentario en este apartado es conveniente notar que las uni-dades siempre se expresarán en el tipo de letra estándar (no cursiva). Así, porejemplo, 3m denotará “tres veces la masa de un cuerpo” pero 3 m denotará “tresmetros.” Por otra parte las unidades siempre se escribirán en minísculas pero susabreviaturas se escribirán en mayúsculas o minúsculas según procedan de unnombre propio o bien uno común. De este modo, 1 s representa “un segundo”y 1 A representa “un amperio” dado que amperio proviene del físico Ampère. Enotro ejemplo tendremos que 1 km represente “un kilómetro” pero 1 Km representa“un kelvin metro”.
2.2.2. Conversión de unidades
Todas las magnitudes físicas contienen un número y una unidad. Cuando es-tas magnitudes se suman, se multiplican o dividen en una ecuación algebraica, launidad puede tratarse como cualquier otra magnitud algebraica. Por ejemplo, su-pongamos que deseamos hallar la distancia recorrida en 3 horas (h) por un cocheque se mueve con una velocidad constante de 80 kilómetros por hora (km/h). La
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
34 Tema 2. Cinemática de la partícula
distancia x es precisamente la velocidad v multiplicada por el tiempo t :
x = v t = 80 km
�h×3 �h = 240 km.
Eliminamos la unidad de tiempo, la hora, igual que haríamos con cualquierotra magnitud algebraica para obtener la distancia en la unidad de longitud co-rrespondiente, el kilómetro. Este método permite fácilmente pasar de una unidadde distancia a otra. Supongamos que quisiéramos convertir nuestra distancia de240 kilómetros en millas (mi). Teniendo en cuenta que 1 mi=1.61 km, si dividimoslos dos miembros de esta igualdad por 1.61 km se obtiene
1 mi
1.61 km= 1 .
Como toda magnitud puede multiplicarse por 1 sin modificar su valor, pode-mos convertir 240 km en millas multiplicando por el factor (1 mi)/(1.61 km):
240 km = 240��km× 1 mi
1.61��km= 149 mi .
El factor (1 mi)/(1.61 km) se denomina factor de conversión. Todos los facto-res de conversión tienen el valor 1 y se utilizan para pasar una magnitud expresadaen una unidad de medida a su equivalente en otra unidad de medida. Escribien-do explícitamente las unidades no es necesario pensar si hay que multiplicar odividir por 1.61 para pasar de kilómetros a millas, ya que las unidades indican sihemos escogido el factor correcto o el incorrecto.
Aunque siempre podemos proceder de la manera anteriormente expuesta,cuando debemos hacer operaciones algebraicas que involucran varias magnitu-des siempre es recomendable expresar los valores numéricos de dichas magnitu-des en el S.I. para así asegurar que el resultado de sus operaciones también tengaunidades del propio S.I. De este modo prescindimos de las unidades enlas ope-raciones intermedias y solo al final añadimos la unidad oportuna del S.I. corres-pondiente a la magnitud involucrada. Así, en el cálculo de la distancia x realizadoanteriormente, primero expresaríamos la velocidad en el sistema internacional,para lo cual
v = 80000
3600= 22,22m/s .
Posteriormente también expresaríamos el tiempo en segundo; esto es, t = 10800sy finalmente operaríamos de la siguiente manera:
x = v t = 22,22×10800 = 240 ×103 m .
2.2.3. Dimensiones de las magnitudes físicas
El área de una figura plana se encuentra multiplicando una longitud por otra.Por ejemplo, el área de un rectángulo de lados 2 m y 3 m es A = (2 m)(3 m) = 6 m2.La unidad de área es el metro cuadrado. Puesto que el área es el producto de doslongitudes, se dice que tiene dimensiones de longitud por longitud, o longitud alcuadrado, que suele escribirse L2. La idea de dimensiones se amplía fácilmente aotras magnitudes no geométricas. Por ejemplo, la velocidad tiene dimensiones delongitud dividida por tiempo o L/T . Las dimensiones de otras magnitudes, talescomo fuerza o energía, se escriben en función de las magnitudes fundamentales:longitud (L), tiempo (T ) y masa (M). La suma de dos magnitudes físicas sólo tienesentido si ambas tienen las mismas dimensiones.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.2. Magnitudes Físicas. Unidades 35
A veces pueden detectarse errores en un cálculo comprobando las dimensio-nes y unidades de las magnitudes que intervienen en él. Supongamos, por ejem-plo, que estamos utilizando erróneamente la fórmula A = 2πr para el área de uncírculo. Veremos inmediatamente que esto no puede ser correcto, ya que 2πr tie-ne dimensiones de longitud, mientras que el área tiene dimensiones de longitudal cuadrado. La coherencia dimensional es una condición necesaria pero no su-ficiente para que una ecuación sea correcta. Una ecuación puede tener las di-mensiones correctas en cada término, pero no describir una situación física. ElCuadro 2.2 relaciona las dimensiones de algunas magnitudes corrientes en física.
Magnitud Símbolo DimensiónÁrea A L2
Volumen V L3
Velocidad v LT−1
Aceleración a LT−2
Fuerza F MLT−2
Presión(F /A) p ML−1T−2
Densidad(M/V ) ρ ML−3
Energía E ML2T−2
Potencia P ML2T−3
Cuadro 2.2: Dimensiones de las magnitudes físicas
Cuando una magnitud carece de dimensiones, se denomina adimensional.Los ángulos, por ejemplo, son magnitudes adimensionales. Esto se ve claramenteen la definición de radián [ver Eq. (1.32)], que se muestra gráficamente en la figura.Con centro en el vértice del ángulo se traza un arco AB de radio R. Entonces lamedida θ en radianes es
θ = s
R(2.1)
donde s es la longitud del arco. Esta definición se basa en el hecho de que s/R es
Definición de ángulo en radianes
independiente del radio del arco y, por tanto, caracteriza bien al ángulo. Un radiánse define, en consecuencia, como el ángulo que corresponde a una longitud delarco igual al radio. Así, una circunferencia completa (360º) tendrá 2π radianes.Claramente, el radián carece de dimensiones, ya que proviene del cociente entredos longitudes. Análogamente, los argumentos de funciones trascendentes (seno,coseno, logaritmo, exponencial, . . . ) son también adimensionales.
Actividad 2.1:
Describa las ventajas más importantes de disponer de un “sistema deunidades” y más en concreto del Sistema Internacional.
Determine si las siguientes expresiones son correctas o incorrectas yrazone su respuesta: (a) 2 ms, (b) 5 Ms, (c) 5 sM, (d) 7 km, (e) 7 mk,(f) 7 mK, (g) 7 Km, (h) 200 KHz, (i) 200 kHz, (j) 200 Julios, (k) 4 Metros,(l) 4 kilometros, (m) 4 Kilometros.
Exprese la velocidad de un móvil que nos dicen que es 120 km/h en lassiguientes unidades: (a) m/s, (b) km/min, (c) mm/año, (d) Mm/día,(e) pulgadas/mes.
Explique la relevancia de un análisis de dimensiones en las expresio-nes físicas.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
36 Tema 2. Cinemática de la partícula
2.3. Movimiento curvilíneo
2.3.1. Partículas materiales
Cuando se mueven los cuerpos describiendo una trayectoria, pueden al mis-mo tiempo girar, caso de una pelota que rueda por el suelo, o vibrar, como unagota de agua que cae. Estos movimientos superpuestos al del cuerpo, que se mue-ve como un todo, dificultan el estudio del movimiento. Para evitar inicialmenteestas complicaciones se considera que los cuerpos se mueven como partículasmateriales. Matemáticamente, una partícula es un objeto puntual (“ocupa” unpunto) sin dimensiones y, por tanto, no puede tener ni rotaciones ni vibracionesinternas.
En la realidad no existen tales objetos puntuales; sin embargo, en el estudiodel movimiento de muchos cuerpos, estos se comportan muy aproxidamente co-mo si lo fueran. Es por ello que la mecánica de la partícula constituye un modelomuy útil para el estudio del movimiento. A continuación realizamos una serie decomentarios en relación con la aplicación del modelo de partícula a la mecánica:
Aunque la palabra partícula se asocia intuitivamente a algo de pequeñas di-mensiones, los cuerpos no tienen que ser necesariamente pequeños para quepuedan considerarse como partículas. Así, con este modelo, se consigue unagran cantidad de información acerca del movimiento de los cuerpos del Sis-tema Solar, considerando cada astro como una partícula, cosa que por otraparte puede estar justificada si tenemos en cuenta la enorme distancia quelos separa en relación con sus dimensiones.
Si el cuerpo es demasiado grande para que pueda asimilarse a una partícula enun problema específico, siempre puede analizarse su movimiento en funciónde los movimientos de cada una de las partículas que lo forman, y en este casotambién resultará útil el modelo de partícula.
Finalmente, es obvio que este modelo de partícula, por su propia definición,tiene una limitación a la hora de aplicarlo. Con él sólo pueden estudiarse mo-vimientos de traslación, entendiendo como tales los movimientos de un cuer-po en los que, si imaginamos un sistema de referencia ligado al cuerpo, susrespectivos ejes se mantienen paralelos a sí mismos en el transcurso del mo-vimiento.
2.3.2. Vectores de posición y velocidad
Cuando una partícula se mueve en el espacio describe en general una líneaque no es una recta y decimos que experimenta un movimiento curvilíneo. Laposición P de la partícula en un instante t queda completamente especificadapor su vector de posición~r (t ) respecto de un sistema de referencia:
~r (t ) = x(t ) x+ y(t ) y+ z(t ) z . (2.2)
En un instante posterior t +∆t , la partícula ocupará una posición P ′ caracte-rizada por un vector de posición~r ′. El vector
∆~r =~r ′−~r (2.3)
representa el cambio de posición de la partícula, tanto su cambio de direccióncomo el cambio de distancia respecto del origen de coordenadas (ver figura). Se
x
y
z trayectoria
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.3. Movimiento curvilíneo 37
define la velocidad media de la partícula durante el intervalo∆t como el cociente
~vm = ∆~r
∆t(2.4)
siendo, por tanto, ~vm un vector de igual dirección y sentido que ∆~r y módulo|∆~r |/∆t .
La velocidad instantánea se define tomando un intervalo∆t muy pequeño ensu límite infitesimal:
~v(t ) = lım∆t→0
∆~r
∆t= lım∆t→0
~r (t +∆t )−~r (t )
∆t= d~r
dt. (2.5)
En la ecuación anterior hemos representado las posiciones de la partícula enel tiempo mediante una función vectorial~r (t ) de la variable escalar t . La velocidadaparece entonces como la derivada de esta función vectorial. El vector velocidadpuede también escribirse en función de las componentes del vector de posiciónde la siguiente forma:
~v(t ) = d~r
dt= x(t ) x+ y(t ) y+ z(t ) z (2.6)
donde el punto encima de una determinada función dependiente del tiempo sig-
Velocidad instantánea
nificada derivada con respecto al tiempo de dicha función. (Nótese que las deriva-das respecto al tiempo de los vectores x, y y z son cero pues su módulo, direccióny sentido permanecen fijos en el tiempo).
El módulo del vector velocidad, v(t ) ≡ |~v(t )| podrá entonces expresarse como
v(t ) =√
[x(t )]2 + [y(t )]2 + [z(t )]2 (2.7)
El vector unitario asociado a la velocidad es un vector tangente a la trayectoria da-do que, cuando P → P ′, encontramos que la dirección de∆~r será la de la tangentea la trayectoria en el punto P (o instante t ). Dicho vector unitario será denotadocomo τ y podrá obtenerse como
τ= x(t ) x+ y(t ) y+ z(t ) z√[x(t )]2 + [y(t )]2 + [z(t )]2
. (2.8)
En el límite mostrado en (2.5) podemos operar de forma diferente para obte-ner unas expresiones alternativas para el módulo y el vector unitario de la veloci-dad. Para ello denotemos como ∆s al desplazamiento a lo largo de la trayectoriaentre los puntos P y P ′. Si multiplicamos y dividimos por ∆s en (2.5) obtenemos
~v(t ) = lım∆t→0
∆~r
∆s
∆s
∆t=
(lım∆s→0
∆~r
∆s
)(lım∆t→0
∆s
∆t
). (2.9)
Notemos ahora que el módulo del primer límite es la unidad dado que ∆s → |∆~r |cuando ∆t → 0 (o, equivalentemente, cuando P → P ′ tenemos que ∆s →|∆~r |). Loanterior nos permite escribir entonces que
lım∆s→0
∆~r
∆s≡ d~r
ds= τ . (2.10)
Para el segundo límite en (2.9), tenemos simplemente que lım∆t→0(∆s/∆t ) = ds/dtpor lo que finalmente podemos escribir
~v(t ) = ds
dtτ= v(t ) τ (2.11)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
38 Tema 2. Cinemática de la partícula
donde
v(t ) = ds
dt(2.12)
representa el módulo de la velocidad instantánea y τ su vector unitario.
Actividad 2.2:
Las trayectorias de las partículas son siempre líneas rectas en el espa-cio. ¿Verdadero o Falso?
¿Puede existir un movimiento en el que su vector velocidad media seanulo, ~vm = 0? Si piensa que sí, describa posibles ejemplos.
Describa las trayectorias de cuatro partículas cuyo vectores posiciónvienen dados respectivamente por ~r1(t ) = t ln(3t )x, ~r2(t ) = 3x + t y,~r3(t ) = 3x+ t 2y,~r4(t ) = t 2y.
Calcule el vector velocidad para los casos anteriores y relacione dichovector con su trayectoria.
Si le diesen únicamente los vectores velocidad obtenidos en el puntoanterior, ¿podría obtener los vectores posición~r (t ) del punto previo alanterior? Razone su respuesta.
¿Sabe distinguir “vector posición” y “trayectoria”? Obtenga cuando seaposible las trayectorias de los movimientos definidos por el vector po-sición del tercer punto.
Demuestre que el espacio recorrido s por una partícula entre los ins-tantes de tiempo t1 y t2 puede expresarse como
s1→2 =∫ t2
t1
√[x(t )]2 + [y(t )]2 + [z(t )]2 dt .
En un movimiento circular uniforme con velocidad angular ω, su vec-tor posición puede escribirse como~r (t ) = R cos(ωt )x+R sen(ωt )y. Uti-lice la integral anterior para obtener el espacio recorrido por la partí-cula en un intervalo de tiempo ∆t . ¿Qué obtendría si ∆t = T , siendo Tel periodo de dicho movimiento?
2.3.3. Vector aceleración
De modo completamente análogo a como hicimos con la velocidad media po-demos igualmente definir la aceleración media como
x
y
z trayectoria
~am = ∆~v
∆t(2.13)
e igualmente la aceleración instantánea vendrá dada por
~a(t ) = lım∆t→0
∆~v
∆t= lım∆t→0
~v(t +∆t )−~v(t )
∆t= d~v
dt(2.14)
que puede reescribirse en función de las derivadas de las componentes del vectorde posición como
Aceleración instantánea~a(t ) = d~v
dt= d2~r
dt 2 = x(t ) x+ y(t ) y+ z(t ) z . (2.15)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.3. Movimiento curvilíneo 39
Anteriormente hemos expresado la velocidad y la aceleración como derivadasdel vector posición. No obstante, podemos proceder inversamente y obtener elvector posición en función de la aceleración y la velocidad. Para ello debemosintegrar las expresiones de la aceleración y velocidad y conocer los valores de lasmismas en un instante dado (que, por comodidad, denotaremos como t = 0).
Supongamos entonces que conocemos el vector aceleración ~a(t ) asociado acierta trayectoria. Dado que tenemos que
~a(t ) = d~v(t )
dt(2.16)
podemos escribir el diferencial de velocidad como
d~v(t ) =~a(t )dt . (2.17)
Tomando como velocidad inicial ~v(t = 0) ≡~v0, al integrar en la ecuación anterior∫ ~v(t )
~v0
d~v =∫ t
0~a(t )dt (2.18)
obtenemos finalmente
~v(t ) =~v0 +∫ t
0~a(t )dt . (2.19)
Si procedemos de forma análoga, partiendo de
~v(t ) = d~r (t )
dt(2.20)
considerando que~r (t = 0) ≡~r0 llegamos a que
~r (t ) =~r0 +∫ t
0~v(t )dt (2.21)
donde ~v(t ) se ha definido en (2.19).
Actividad 2.3:
El vector aceleración en un punto P es tangente a la trayectoria en di-cho punto. ¿Verdadero o Falso? Razone su respuesta.
El vector aceleración en un punto P nunca es tangente a la trayectoriaen dicho punto. ¿Verdadero o Falso? Razone su respuesta.
¿Puede existir un movimiento acelerado en el que su vector acelera-ción media sea nulo, ~am = 0? Si piensa que sí, describa posibles ejem-plos.
¿Existe alguna relación geométrica sencilla que nos permita determi-nar la dirección de la aceleración de una partícula a partir de su tra-yectoria? Razone su respuesta.
Halle el vector aceleración en un movimiento circular uniformecon velocidad angular ω si vector posición viene dado por ~r (t ) =R cos(ωt )x+R sen(ωt )y. ¿Qué característica relevante tiene dicha ace-leración?
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
40 Tema 2. Cinemática de la partícula
EJEMPLO 2.1 Una partícula, que en el instante inicial se encuentra en el punto dadopor el vector ~r0 = 8x + 2y m con velocidad ~v0 = 6y + 7z m/s, posee una aceleración~a(t ) = −27cos(3t )x− 12sen(2t )y m/s2. Calcule, para un instante genérico t , el vectorde posición de la partícula ~r (t ) (todas las distancias están en metros, los ángulos enradianes y el tiempo en segundos).
En primer calculamos el vector velocidad, y para ello partimos de d~v =~a dt . Al integraresta expresión en nuestro caso particular obtenemos que
∫ ~v
~v0
d~v =∫ t
0~a dt
~v −~v0 =∫ t
0
[−27cos(3t )x−12sen(2t )y]
dt
de donde obtenemos que
~v(t ) =~v0 +[−9sen(3t )x+6cos(2t )y
]t0
= 6y+7z−9sen(3t )x+6cos(2t )y−6y
=−9sen(3t )x+6cos(2t )y+7z .
Análogamente procedemos para obtener el vector posición~r (t ) a partir de
∫ ~r
~r0
d~r =∫ t
0~v dt
~r (t )−~r0 =∫ t
0
[−9sen(3t )x+6cos(2t )y+7z]
dt .
Al operar encontramos que
~r (t ) =~r0 +[3cos(3t )x+3sen(2t )y+7t z
]t0
=8x+2y+3cos(3t )x−3x+3sen(2t )y+7t z
= [5+3cos(3t )] x+ [2+3sen(2t )] y+7t z .
2.3.4. Movimiento uniforme (MU)
El caso más sencillo de movimiento de una partícula es el movimiento unifor-me. Este movimiento se caracteriza porque su aceleración es nula; esto es, ~a = 0.Según la expresión (2.19), esto significa que
~v(t ) =~v0
es decir, que el vector velocidad es constante. Al introducir este vector en la expre-sión (2.21), obtenemos finalmente que
~r (t ) =~r0 +~v0t . (2.22)
Este movimiento es un movimiento rectilíneo a lo largo de la recta que pasa por elpunto~r0 y cuya dirección la marca ~v0. En el caso particular de que esta direccióncoincida con el eje x, tendremos el conocido como movimiento rectilíneo unifor-me, cuya ecuación será
x(t ) = x0 + v0t . (2.23)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.3. Movimiento curvilíneo 41
2.3.5. Movimiento uniformemente acelerado (MUA)
Este movimiento se caracteriza por tener una aceleración constante:
~a(t ) =~a0 .
Al operar ahora en las expresiones (2.19) y (2.21) obtenemos que la velocidad yposición de la partícula vienen dadas porque
~v(t ) =~v0 +~a0t (2.24)
~r (t ) =~r0 +~v0t + 1
2~a0t 2 . (2.25)
Velocidad y posición en el MUA
A continuación analizamos dos situaciones particulares de MUA que pode-mos encontrar frecuentemente en nuestra experiencia diaria.
Caso 1: Movimiento rectilíneo uniformemente acelerado
En el caso particular de que los vectores velocidad y aceleración sean cons-tantes y paralelos entre sí, definimos este movimiento como movimiento rectilí-neo uniformemente acelerado (MRUA). En el caso particular en que ~v0 = v0 x y~a0 = a0 x, entonces tendríamos que
v(t ) = v0 +a0t (2.26)
x(t ) = x0 + v0t + 1
2a0t 2 . (2.27)
Velocidad y posición en el MRUA
Se puede eliminar el tiempo de las ecuaciones (2.26) y (2.27) obteniendo lasiguiente relación:
v2 = v20 +2ax (2.28)
Relación entre velocidad y posiciónen el MRUA
Un ejemplo de movimiento rectilíneo uniformemente acelerado es la caídalibre de un cuerpo, en el cual a = g , donde g = 9.81 m/s2 es la aceleración de lagravedad.
Caso 2: Movimiento parabólico bajo la acción gravitatoria
Un proyectil es cualquier cuerpo que recibe una velocidad inicial y luego sigueuna trayectoria determinada debido a los efectos de la aceleración de la gravedad.Un balón lanzado, un paquete soltado de un avión o una bala disparada de uncañón son ejemplo de proyectiles.
Para analizar este tipo de movimiento, partiremos de un modelo idealizadoque representa el proyectil como una partícula con aceleración (debida a la gra-vedad) constante en módulo y dirección. Despreciaremos los efectos del aire y lacurvatura de la Tierra.
En primer lugar, observamos que el movimiento de un proyectil está limita-do a un plano vertical determinado por la dirección de la velocidad inicial. Estose debe a que la aceleración debida a la gravedad es exclusivamente vertical; lagravedad no puede mover un proyectil lateralmente. Por tanto, este movimientoes bidimensional. Tomamos como plano de movimiento el plano x y , con el eje
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
42 Tema 2. Cinemática de la partícula
FIGURA 2.1: Trayectoria de un proyectil con una velocidad inicial ~v0 y un ánguloα0 respecto a la horizontal. La distancia xA es el alcance horizontal, y H es laaltura máxima.
x horizontal hacia la derecha y el y vertical hacia arriba. En este caso tendremosque
~a =−g y
y si representar la velocidad inicial ~v0 con su módulo v0 y su ángulo θ0 con el ejex en términos de sus componentes
v0x = v0 cosθ0 v0y = v0 senθ0 (2.29)
entonces, al sustituir en (2.24) y (2.25), llegamos a que
~v(t ) = (v0 cosθ0x+ v0 senθ0 y)− g y t
~r (t ) = (x0x+ y0y)+ (v0 cosθ0x+ v0 senθ0 y)t − 1
2g y t 2
o, equivalentemente, a un movimiento en el eje x que es un movimiento rectilíneouniforme:
vx (t ) = v0x
x(t ) = x0 + v0x t .(2.30)
y a un movimiento en la dirección y que es uniformemente acelerado (con acele-ración constante ay =−g ):
vy (t ) = v0y − g t
y(t ) = y0 + v0y t − 12 g t 2 .
(2.31)
Por lo general, lo más sencillo es tomar la posición inicial (en t = 0) comoorigen; así, x0 = y0 = 0. Este punto podría ser la posición de una pelota cuandoabandona la mano del lanzador, o la de una bala cuando sale de un cañón. LaFig. 2.1 muestra la trayectoria de un proyectil que parte de (o pasa por) el origende coordenadas en t = 0. La posición, velocidad, componentes de velocidad y ace-leración se muestran en una serie de instantes equiespaciados. La componente xde la aceleración es 0, así que vx es constante. La componente y de la aceleración
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.3. Movimiento curvilíneo 43
es constante (pero no nulo), así que vy cambia en cantidades iguales a intervalosiguales. En el punto mas alto de la trayectoria, vy = 0.
Tomando x0 = y0 = 0 en (2.30) y (2.31) llegamos a que
x(t ) = v0 cosθ0t y(t ) = v0 senθ0t − 1
2 g t 2
vx (t ) = v0 cosθ0 vy (t ) = v0 senθ0 − g t(2.32) Ecuaciones del movimiento de pro-
yectiles
Estas ecuaciones describen la posición y la velocidad del proyectil de la Fig. 2.1en cualquier instante de tiempo t . Podemos deducir la siguiente ecuación de latrayectoria y(x) eliminando t de las ecuaciones anteriores:
y(x) = (tanθ0)x − g
2v20 cos2θ0
x2 (2.33)
que, dado que θ0, v0 y g son constantes, corresponde a la ecuación de una pará-
Trayectoria parabólica
bola.
Es también interesante encontrar los valores de la altura máxima H y del al-cance xA en función de las constantes v0 y θ0. Para encontrar el valor de la alturamáxima, tenemos en cuenta que en ese punto, vy = 0, y buscamos para qué valorde t = t1 tiene lugar ese evento. Sustituimos t1 en la ecuación de y(t ) y de ahí seobtiene H = y(t1):
t1 = v0 senθ0
g
H = y(t1) = v0 senθ0
(v0 senθ0
g
)− 1
2g
(v0 senθ0
g
)2
es decir,
H = v20 sen2θ0
2g. (2.34)
Si variamos θ0, el valor máximo de h se obtiene cuando senθ0 = 1, es decir,θ0 = 90º. Para obtener la ecuación del alcance xA usamos la ecuación de la trayec-toria (2.33) para obtener el valor de x cuando y = 0:
(tanθ0)x = g
2v20 cos2θ0
x2 .
Esta ecuación tiene dos raíces: la primera correspondería al punto inicial (x =0, y = 0); la otra raíz x = xA nos daría el siguiente valor del alcance:
xA = 2v20 senθ0 cosθ0
g= v2
0 sen2θ0
g. (2.35)
El alcance será máximo cuando sen2θ0 = 1, es decir, θ0 = 45º. Dada la simetríade la trayectoria se puede deducir que el tiempo que tarda en alcanzarse la alturamáxima es la mitad del tiempo necesario para que x = xA ; además, y(xA/2) = H .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
44 Tema 2. Cinemática de la partícula
Actividad 2.4:
¿Es posible un movimiento uniforme cuya trayectoria sea curvilínea?Si piensa que es posible, ponga un ejemplo.
¿Es posible un movimiento uniformemente acelerado cuya trayectoriano sea rectilínea? Si piensa que es posible, ponga diversos ejemplos.
Todos los movimientos curvilíneos son MUA. ¿Verdadero o Falso? Ra-zone su respuesta.
El movimiento parabólico de un proyectil se dice que es un MUA ¿Porqué? ¿Podría tener el proyectil una trayectoria no parabólica?
La caida de un paracaidista desde un avión, ¿es un MUA?
¿Corresponde~r (t ) =~r0 +~v0t 2 + 12~a0t 2 a un MUA?
EJEMPLO 2.2 Una partícula sale despedida desde un edificio de altura h con cierta velo-cidad inicial horizontal ~v0 = v0xx.(a) Calcular la velocidad final ~v f = v f x x+v f y y cuandola partícula impacta en el suelo en función de h, v0 y g . (b) Calcular el ángulo α queforma ~v f con la horizontal en función de las mismas variables. (c) Calcular el radio decurvatura ρ en el instante final en función de las mismas variables.
(a) En la presente situación debemos tener en cuenta que tenemos una trayectoria para-bólica donde se verifican las siguientes ecuaciones:
vx (t ) = v0 x(t ) = v0t
vy (t ) =−g t y(t ) = h − 1
2g t 2 .
Al llegar al suelo tenemos que y = 0 y, por tanto,
0 = h − 1
2g t 2 =⇒ t =
√2h
g.
La componente y de la velocidad en el instante anterior será
v f y =−g
√2h
g=
√2g h
por lo que el vector velocidad final vendrá dado por
~v f = v0 x−√
2g h y .
(b) Para calcular el ángulo α debemos notar en la figura adjunta que
tanα=|v f y ||v f x |
=√
2g h
v0
y, por tanto,
α= arctan
√2g h
v0.
(c) Finalmente, para el cálculo del radio de curvatura debemos considerar que en el ins-tante del impacto se verifica (esta expresión la obtendremos en el Apartado siguiente)
an =v2
f
ρ=⇒ ρ =
v2f
an
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.4. Componentes intrínsecas de la aceleración 45
donde v f = |~v f | =√
v20 +2g h y an es el módulo de la componente normal de la acelera-
ción. Esta componente es normal a la trayectoria y estará dirigida según se muestra en lafigura adjunta. Dado que la aceleración en nuestro problema es ~a =−g y, tendremos que
an = g cosα= gv f x
v f= g v0√
v20 +2g h
de donde obtenemos finalmente
ρ =v2
f
an= (v2
0 +2g h)3/2
g v0.
2.4. Componentes intrínsecas de la aceleración
Al describir el movimiento curvilíneo observamos que la velocidad es un vec-tor tangente en todo instante a la trayectoria mientras que la aceleración, en gene-
En general, el vector aceleración NOes tangente a la trayectoria
ral, NO lo es. En muchas ocasiones, resulta conveniente descomponer la acelera-ción según las direcciones tangente y normal a la trayectoria. Por simplicidad nosrestringiremos al movimiento plano. Consideremos una partícula que se muevedescribiendo una curva en el plano del papel. De acuerdo con la ecuación (2.11),expresamos la velocidad como
~v = v τ (2.36)
donde τ es un vector unitario tangente a la trayectoria y orientado en el sentidodel movimiento. La aceleración la obtenemos derivando respecto al tiempo,
~a = dv
dtτ+ v
dτ
dt. (2.37)
Obsérvese que, a diferencia de lo que sucede con los vectores unitarios (x, y,z), la derivada de τ es en general distinta de cero, ya que aunque el módulo de τes siempre la unidad, su dirección cambia de un punto a otro de la trayectoria. Siconsideramos τ como una función del ángulo θ que forma con el eje x, aplicandola regla de la cadena tendremos
dτ
dt= dτ
dθ
dθ
dt. (2.38)
Necesitamos calcular las dos derivadas. Para ello, consideramos la figura ad-junta. Sea P la posición de una partícula en un instante dado t y tomemos denuevo τ como el vector tangente a la trayectoria en el punto P . En un instanteposterior t ′ = t +∆t , la partícula se encontrará en el punto P ′ y el vector tangenteserá τ′.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
46 Tema 2. Cinemática de la partícula
Tomemos ahora los vectores τ y τ′ y los dibujamos desde un mismo origental como aparece en la figura adjunta. Como ambos tienen módulo unidad, susextremos se encuentran sobre una circunferencia de radio unidad. El ángulo queforman entre sí lo denominamos ∆θ de manera que el vector ∆~τ = τ′− τ tendrámódulo
|∆~τ| =√|τ|2 +|τ′|2 −2cos∆θ =
√2(1−cos∆θ) = 2sen
∆θ
2
De manera análoga a lo que sucedía con la velocidad en el límite ∆θ → 0, elvector ∆~τ se vuelve tangente a la circunferencia de radio unidad de la figura y,por tanto, perpendicular a τ. En dicho límite el vector ∆~τ/∆θ tiene esas mismaspropiedades, pero además su módulo vale
lım∆θ→0
∣∣∣∣∆~τ∆θ∣∣∣∣= lım
∆θ→0
2sen(∆θ/2)
∆θ= lım∆θ→0
sen(∆θ/2)
(∆θ/2)= 1
Es decir, en el límite en que ∆θ → 0, el vector ∆~τ/∆θ es un vector unitarioperpendicular a τ y con el mismo sentido que gira τ. Podemos entonces escribir
n = lım∆θ→0
∆~τ
∆θ= dτ
dθ(2.39)
El vector unitario n se denomina vector normal a la trayectoria. Conformajunto con τ un par de vectores unitarios perpendiculares entre sí en cada puntode la trayectoria.
Una vez obtenida la derivada de τ, necesitamos calcular dθ/dt . Este valor seexpresará en función del concepto llamado radio de curvatura instantáneo, ρ.Para definirlo, consideremos dos puntos de la trayectoria P y P ′, alcanzados endos instantes de tiempo muy próximos t y t +dt . Si la trayectoria es curva, lasperpendiculares a la trayectoria que pasan por P y P ′ se cortarán en un punto C ,como se muestra en la figura. Obviamente, si la trayectoria fuera circular, ρ coin-cidiría con su radio. La idea intuitiva consiste en considerar que en un intervalomuy pequeño de tiempo dt , la distancia recorrida ds puede asimilarse a un arcode circunferencia de radio ρ. La relación entre ρ y ds será entonces
ds = ρdθ
y dividiendo por dt tendremosds
dt= ρdθ
dt
de dondedθ
dt= 1
ρ
ds
dt. (2.40)
Recordemos que ds/dt es el módulo de la velocidad e insertando la ecuación(2.40) en (2.38) obtenemos
dτ
dt= v
ρn . (2.41)
Sustituyendo esta ecuación en (2.37) llegamos finalmente a que
~a = dv
dtτ+ v2
ρn ≡~at +~an . (2.42)
Componentes intrínsecasde la aceleración
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.4. Componentes intrínsecas de la aceleración 47
Por consiguiente, la componente tangencial de la aceleración refleja el cam-bio en el módulo de la velocidad, mientras que la componente normal refleja elcambio en la dirección del movimiento de la partícula. Cuanto más pequeño seael radio de curvatura y más grande la velocidad, más rápido será el cambio en ladirección de la velocidad. La aceleración de una partícula sólo será cero cuandotanto la componente tangencial como la normal sean nulas. Es decir, si una par-tícula se mueve con velocidad constante describiendo una curva, su aceleraciónno es cero, salvo que la partícula pase por un punto de inflexión o su trayectoriasea recta.
Se puede hacer una clasificación general del movimiento en función de lascomponentes intrínsecas de la aceleración:
an = 0 (ρ =∞)
at = 0 (Movimiento rectilíneo uniforme)
at = cte (Movimiento rectilíneo uniformemente acelerado)
an 6= 0 (ρ = cte)
at = 0 (Movimiento circular uniforme)
at = cte (Movimiento circular uniformemente acelerado)
Actividad 2.5:
Enumere las razones por las que es conveniente describir el vector ace-leración en términos de la aceleración tangencial y normal.
Demuestre que el diferencial (du) de un vector unitario (u) es siempreperpendiular a este vector unitario.[Ayuda: u · u = 1 por lo que d(u · u) = 0].
Determine si las siguientes afirmaciones son verdaderas o falsas, razo-nando su respuesta.
• En un movimiento rectilíneo uniformemente acelerado, la acelera-ción normal es nula.
• En un movimiento circular uniforme no existe aceleración.
• En un movimiento parabólico bajo la acción única de la gravedad(esto es, ~a =−g y), la aceleración normal es constante.
• El radio de curvatura se mide siempre desde el origen de coorde-nadas.
• En un movimiento circular, la aceleración tangencial es siemprenula.
• Si el módulo de la velocidad es constante en cierto movimiento, suradio de curvatura es constante.
¿Existe algún movimiento en que tanto la aceleración tangencial comola normal sean constantes? Razone su respuesta.
Demuestre la siguiente igualdad: a2n = a2 −a2
t .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
48 Tema 2. Cinemática de la partícula
EJEMPLO 2.3 El vector posición de una partícula viene dado por ~r = 3t 2x+6t y, dondeel tiempo está en segundos y la distancia en metros. Determinar: (a) La trayectoria dela partícula. (b) Los vectores velocidad y aceleración. (c) Los vectores unitarios tangen-cial τ y normal n, y las componentes intrínsecas de la aceleración (normal y tangencial).(d) El radio de curvatura.
(a) Dado que~r = 3t 2x+6t y, tenemos que
x(t ) = 3t 2
y(t ) = 6t .
Al despejar t de la segunda ecuación obtenemos que
x = 3y2
36= y2
12
es decir la ecuación de un parábola simétrica respecto al eje x.
(b) Los vectores velocidad y aceleración vendrán dados por
~v =~r = (6t x+6 y) m/s
~a = ~v = 6 x m/s2 .
(c) El vector tangente a la trayectoria coincide con el vector unitario asociado a la veloci-dad. Para ello calcularemos primero el módulo de la velocidad:
|~v | ≡ v = 6√
1+ t 2
por lo que
τ= ~v
|~v | =6t x+6 y
6√
1+ t 2= t x+ y√
1+ t 2.
Para calcular el vector normal debemos tener en cuenta la descomposición de la ace-leración en sus componentes tangencial y normal
~a =~aτ+~an = aτ τ+an n ,
de donde deducimos que~an =~a −~aτ
cuyo vector unitario asociado será finalmente n.
Por otra parte, la componente tangencial de la aceleración puede obtenerse como
~aτ = (~a · τ)τ= 6t
1+ t 2(t x+ y)
por lo que la aceleración normal será
~an = 6x− 6t
1+ t 2(t x+ y) = 6
1+ t 2(x− t y)
cuyo módulo es
|~an | = 6√1+ t 2
y el vector unitaria normal será entonces
n = ~an
|~an |= x− t y√
1+ t 2.
NOTA: En este caso de movimiento en un plano debemos recordar que el vector unita-rio normal podía haber sido obtenido directamente de la expresión del vector unitariotangente teniendo en cuenta que debe cumplirse n · τ= 0. Es decir la ecuación
τx nx +τy ny = 0
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.5. Movimiento circular 49
se verifica tomando nx = ±τy y ny = ∓τx , lo que nos dice directamente a partir de laexpresión obtenida para τ que
n± = ±x∓ t y√1+ t 2
.
El signo ± debe escogerse en cada caso de modo que la normal apunte hacia el centrode la trayectoria.
(d) Como tenemos que
an = v2
ρ→ ρ = v2
an
deducimos que
ρ = 62(1+ t 2)
6/√
1+ t 2= 6(1+ t 2)3/2 .
Nota: Parte de los dos últimos apartados podrían haberse respondido haciendo usodirectamente de la expresión (2.41), que nos decía que
dτ
dt= v
ρn .
2.5. Movimiento circular
Un caso de interés práctico del movimiento curvilíneo es el movimiento cir-cular. En este movimiento, el radio de curvatura es constante e igual al radio rde la circunferencia (trayectoria) que describe la partícula, y la velocidad, al sertangente a la trayectoria, es perpendicular al radio en cada punto.
Las coordenadas cartesianas de la partícula respecto de un sistema de referen-cia con origen en el centro de la trayectoria circular pueden expresarse en funcióndel ángulo θ(t ) (ver figura) como
x(t ) = r cosθ(t )
y(t ) = r senθ(t )
o, equivalentemente,
trayectoriacircular
~r (t ) = r cosθ(t ) x+ r senθ(t ) y (2.43)
= r [cosθ(t ) x+ senθ(t ) y] = r r . (2.44)
Debemos notar que el ángulo θ(t ) puede tener, en principio, cualquier depen-dencia con el tiempo. La característica de “movimiento circular” proviene única-mente del hecho de que la trayectoria es circular; esto es, |~r (t )| constante. Ademásencontramos que n ≡ r en este movimiento circular.
El vector velocidad asociado a este movimiento circular será entonces
~v(t ) =~r (t ) = v τ
= rd
dt
(cosθ(t ) x+ senθ(t ) y
)=r
[−senθ(t ) x+cosθ(t ) y] dθ
dt. (2.45)
En la expresión anterior aparece la magnitud dθ/dt ; esto es, el “ángulo barridopor unidad de tiempo”:
ω= dθ
dt(2.46)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
50 Tema 2. Cinemática de la partícula
que se denomina velocidad angular y cuya unidad en el Sistema Internacional
Velocidad angular. Definición
es el rad/s. El módulo de la velocidad puede escribirse, por tanto, como
v =ωr (2.47)
y su vector unitario tangente a la trayectoria será entonces
τ=−senθ(t ) x+cosθ(t ) y
por lo que obtenermos finalmente que
~v =ωr τ . (2.48)
La velocidad angular ω puede considerarse como un vector perpendicular alplano formado por ~v y~r (ver figura), cuyo sentido nos indica el sentido del mo-vimiento circular (es decir, horario o anti-horario) haciendo uso de la regla de lamano derecha. La expresión vectorial que relaciona estos tres vectores es
~v =~ω×~r . (2.49)
De forma análoga, el vector aceleración del movimiento circular generalizadose obtendrá de la siguiente manera:
~a(t ) = ~v(t ) = d
dtrω τ= r
dω
dtτ+ rω
dτ
dt. (2.50)
Si ahora se define la aceleración angular como
α= dω
dt= d2θ
dt 2 (2.51)
(siendo rad/s2 su unidad en el Sistema Internacional) y tenemos en cuenta que
Aceleración angular. Definición
dτ
dt= d
dt
[−senθ(t ) x+cosθ(t ) y]= dθ
dt
[−cosθ(t ) x− senθ(t ) y]=−ωr =ωn
llegamos finalmente a que la aceleración en este caso puede expresarse como
~a(t ) =αr τ+ω2r n . (2.52)
Al igual que hicimos con el MUA, a continuación estudiamos dos casos parti-culares de movimiento circular de interés práctico.
Caso 1: Movimiento circular uniforme
Si α= 0, es obvio que ω es constante e integrando la ecuación (2.46) llegamosa que
θ(t ) = θ0 +ωt (2.53)
expresión característica del movimiento circular uniforme. El tiempo empleadoen dar una vuelta o revolución se denomina periodo T . Haciendo t = T y θ =θ0 +2π en la ecuación (2.53) se deduce que
PeriodoT = 2π
ω. (2.54)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.5. Movimiento circular 51
Al número de revoluciones o ciclos que efectúa la partícula por unidad detiempo se denomina frecuencia:
Frecuenciaf = 1
T= ω
2π(2.55)
y se expresa en el S.I. en hercios (Hz) o ciclos por segundo (s−1).
Por lo tanto, en el movimiento circular uniforme [tomando θ0 = 0 por conve-niencia] tenemos que
x(t ) = r cos(ωt )
y(t ) = r sen(ωt )
Derivando, obtenemos vx (t ) = x(t ) =−ωr sen(ωt )
vy (t ) = y(t ) = ωr cos(ωt )
Volviendo a derivar, resultaax (t ) = vx (t ) =−ω2r cos(ωt ) =−ω2x(t )
ay (t ) = vy (t ) =−ω2r sin(ωt ) =−ω2 y(t )
de donde obtenemos que~a = ax x+ay y =−ω2~r (2.56)
es decir, no existe aceleración tangencial en el movimiento circular uniforme. Laúnica compomente de la aceleración que existe en este tipo de movimiento es laaceleración normal; es decir,
at = 0 (2.57)
an =ω2r = v2
r. (2.58)
El hecho anterior es esperado, ya que al serω constante, el módulo de la velocidadv también lo será, y, por consiguiente, at = v = 0. Obsérvese entonces que α = 0no implica a = 0, ya que la velocidad cambia continuamente de dirección.
Caso 2: Movimiento circular uniformemente acelerado
Cuandoα es constante, tenemos un movimiento circular uniformemente ace-lerado. La velocidad angular y la posición angular vendrán dadas entonces por
ω(t ) =ω0 +αt
θ(t ) = θ0 +ω0t + 12αt 2
y tanto la componente tangencial como la componente normal de la aceleraciónserán no nulas:
at = dv
dt= d
dt(ωr ) =αr (2.59)
an = v2
r=ω2r . (2.60)
Ciertamente, las expresiones anteriores de las componentes de la aceleraciónde un movimiento circular uniformemente acelerado están en concordancia con(2.52).
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
52 Tema 2. Cinemática de la partícula
2.5.1. Movimiento armónico simple
Un tipo de movimiento muy común en la naturaleza es el movimiento armóni-co simple (MAS). Este movimiento describe las pequeñas oscilaciones de muchossistemas. Aunque este movimiento será analizado con más detalle en próximostemas, podemos ahora adelantar que la proyección sobre el eje x del movimientocircular uniforme nos da precisamente el MAS, que viene descrito por la siguienteecuación de movimiento:
x(t ) = A cos(ωt +θ0) (2.61)
donde A es la amplitud del movimiento (−A ≤ x(t ) ≤ A), ω= 2π/T se conoce co-mo frecuencia angular, T es el periodo del movimiento y θ0 la fase inicial.
La velocidad y aceleración del MAS vienen dados por
x(t ) =−ωA sen(ωt +θ0) (2.62)
x(t ) =−ω2 A cos(ωt +θ0) (2.63)
donde podemos observar que la aceleración x(t ) es proporcional a x(t ).
x
Actividad 2.6:
¿Existe algún movimiento en el que su velocidad no sea tangente a sutrayectoria?
Describa algunos movimientos en los que su aceleración sea tangentea su trayectoria.
Describa algunos movimientos en los que su aceleración no sea tan-gente a su trayectoria.
¿Qué diferencia existe entre la velocidad de un movimiento curvilíneoy uno circular? ¿Y entre sus aceleraciones?
¿Por qué tienen unidades distintas la velocidad y la velocidad angular?
Explique por qué no cae a la tierra un satélite en órbita geoestaciona-ria a pesar de que la gravedad de La Tierra lo empuja constantementehacia su centro. ¿Entiende por qué se dice que estos objetos están en“caída libre”?
¿Hay alguna componente, tangencial o normal, constante en el movi-miento circular uniformemente acelerado?
2.6. Movimiento relativo de traslación
En muchas ocasiones es útil emplear un sistema de referencia móvil respec-to del sistema fijo ligado a un observador O. Consideremos el caso en el que losejes (x ′, y ′, z ′) del sistema móvil son paralelos a los ejes (x, y , z) fijo en O y ade-más se trasladan respecto de O sin modificar su orientación en el espacio. Veamosentonces qué relación existe entre las descripciones del movimiento de una par-tícula vista desde O y vista desde O′.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.6. Movimiento relativo de traslación 53
Llamemos~r al vector de posición de la partícula, situada en el punto P , res-pecto de O, y ~r ′ al vector de posición del punto P respecto de O′. En la figurapodemos ver que
~r =~r ′+~roo′ (2.64)
siendo~roo′ el vector de posición de O′ respecto a O. Derivando, obtenemos
~v =~v ′+~voo′ (2.65)
y volviendo a derivar
~a =~a′+~aoo′ . (2.66)
Es decir, el movimiento visto desde O puede obtenerse como una combinaciónentre el movimiento visto desde O′ y el movimiento de O′ respecto de O. Esteresultado deja de ser válido cuando el sistema móvil cambia su orientación con eltiempo.
Un caso de especial interés es aquel en el que los observadores O y O′ estánen movimiento de traslación relativo uniforme. En ese caso, ~voo′ es constante y elsistema O′ recibe el nombre de sistema de referencia inercial. En consecuencia
~a =~a′ (2.67)
esto es, los dos observadores miden la misma aceleración. Esto es importante por-que desde un punto de vista dinámico, como veremos en el próximo tema, signi-fica que ambos observadores ven las mismas fuerzas. Las ecuaciones (2.64)–(2.67)contienen implícita una suposición: que el tiempo transcurre de igual manera pa-ra los observadores O y O′, esto es, que si hacemos t = 0 cuando ambos coinciden,entonces
t = t ′ (2.68)
Esta suposición de tiempo absoluto fue refutada por Einstein en su teoría especialde la relatividad.
El conjunto de ecuaciones (2.64), (2.65), (2.67) y (2.68) recibe el nombre detransformaciones de Galileo. Su importancia está en que nos descubre el hechode que una magnitud física, como es la aceleración, es independiente del movi-miento del observador (o, más precisamente, es la misma) para todos los obser-vadores en movimiento de traslación relativo uniforme. La existencia de magnitu-des físicas invariantes bajo transformaciones facilita enormemente la resoluciónde problemas y ha tenido una influencia profunda en la formulación de las leyesde la física.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
54 Tema 2. Cinemática de la partícula
Actividad 2.7:
¿Es La Tierra en su movimiento alrededor del Sol un sistema de refe-rencia inercial?
¿Podría ocurrir que se soltase una piedra en un ascensor y que viése-mos que dicha piedra sube hacia el techo del ascensor?
Explique la razón por la que, si suelta un objeto desde lo alto del más-til de un barco en movimiento uniforme acercándose al puerto, dichoobjeto cae justo al lado del mástil habiendo seguido en su trayecto-ria la vertical del mástil. ¿Qué tipo de trayectoria vería un observadorsituado en el puerto?
¿Qué dirección debe tomar un avión con velocidad crucero respecto alaire de 300 km/h para tener rumbo Norte respecto al suelo si hay unviento lateral dirección Oeste de 100 km/h? ¿Qué velocidad respecto alsuelo tendrá el avión?
EJEMPLO 2.4 Un bote viaja con rapidez de vBA relativa al agua en un río de anchuraD. La rapidez con que fluye el agua es vA. (a) Pruebe que el tiempo necesario paracruzar el río a un punto exactamente opuesto al punto de partida y luego regresar esta = 2D/
√v2
BA − v2A. (b) Demuestre que el ángulo que debe tomar la barca respecto a
la dirección de la corriente viene dado por tanα=−√
v2BA − v2
A/vA. (c) También pruebeque el tiempo que tarda el bote en viajar una distancia D aguas abajo y luego regresares tb = 2DvBA/(v2
BA − v2A). Nota: La rapidez es el módulo del vector velocidad.
(a) Llamamos a la velocidad del bote vista por nosotros ~v y sabemos que la velocidad delagua es~v A = v A x y además que el módulo de la velocidad del bote respecto al agua es vB A .
Ciertamente se cumplirá, en general, que
~v =~v A +~vB A .
En este caso nosotros queremos que la trayectoria del bote sea únicamente a lo largo de ladirección y . Por ello tendremos que ~v = v y; esto es
v y = v A x+~vB A
por lo que~vB A = v A x− v y .
Si ahora tomamos módulo en la expresión anterior (y elevamos al cuadrado), obtenemosque
v2B A = v2
A + v2
de donde concluimos que
v2 =√
v2B A − v2
A .
El tiempo que tarda el bote en alcanzar la otra orilla será t1 = D/v , idéntico al tiempo quetardará en volver. Por ello, el tiempo total en este recorrido será finalmente
t = 2D
v= 2D√
v2B A − v2
A
.
(b) El ángulo que debe tomar el bote con respecto a la corriente del río es precisamente elángulo que hace el vector ~vB A con respecto al eje x. En este caso tendremos que
tanα=− v
v A=−
√v2
B A − v2A
v A.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.6. Movimiento relativo de traslación 55
(c) Consideremos ahora el caso de que el bote recorra una distancia D aguas abajo (abj) ydespués vuelva aguas arriba (arb). En este caso debemos distinguir dos situaciones.
Aguas abajo (abj).En esta primera situación observamos que
~v =−vabj x ~v A = v A x ~vB A =−vB A x
de donde obtenemos directamente que
vabj = vB A − v A
y, por tanto, el tiempo en este recorrido será
tabj =D
vabj= D
vB A − v A.
Aguas arriba (arb).En esta segunda situación tenemos
~v = varb x ~v A = v A x ~vB A = vB A x
de donde obtenemos directamente que
varb = vB A + v A
y, por tanto, el tiempo en este recorrido será
tarb = D
varb= D
vB A + v A.
Finalmente el tiempo total en el recorrido de ida y vuelta será
t = tabj + tarb
= D
vB A − v A+ D
vB A + v A= 2DvB A
v2B A − v2
A
.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
56 Tema 2. Cinemática de la partícula
2.7. Problemas propuestos
2.1: La posición x (en m) de un objeto que se mueve a lo largo de una línea recta viene dada por x(t ) =16− 12t + 2t 2, donde el tiempo está en segundos. (a) Represente gráficamente (a mano) la posicióncomo función del tiempo, desde t = 0 hasta t = 6. (b) Represente gráficamente (a mano) la velocidadcomo función del tiempo, desde t = 0 hasta t = 6. (c) Represente gráficamente (a mano) la aceleracióncomo función del tiempo, desde t = 0 hasta t = 6. (d) ¿Cuánto vale la velocidad en t = 0 s, t = +2 s yt = +4 s? (e) Cuando la velocidad es 0, ¿dónde se encuentra el objeto? (f)¤¿Cuánto vale la velocidadmedia entre t = −1s y t = 3s? (g) ¿Cuánto vale la velocidad media entre t = 0s y t = 6s? (h) ¿Cuántovale el promedio de la “celeridad” (definida como distancia recorrida/tiempo empleado) entre t = 0s yt = 6s? (i) ¿En qué instante cambia de sentido el movimiento del objeto? Nota: No olvide nunca, inclusoen las representaciones gráficas, indicar las unidades de cada magnitud.Sol. (d): v(0) =−12m/s, v(2) =−4m/s, v(4) = 4m/s; (e): x(3) =−2m; (f): vm =−8m/s; (g): vm = 0m/s;(h): 32/6m/s; (i): t = 3s.
2.2: Las posiciones de dos coches en carriles paralelos de una autopista recta se muestran en la figuracomo funciones del tiempo. Responda de forma cualitativa a las siguientes preguntas: (a): ¿Están enalgún momento los dos coches lado a lado? Si es así, indique en qué momento(s). (b): ¿Viajan los cochessiempre en la misma dirección? Si no es así, indique en qué intervalo ocurriría esto. (c): ¿Viajan loscoches en algún momento a la misma velocidad? Si es así, indique el momento. (d): ¿En qué instanteestán los coches más separados? (e): Dibuje una curva aproximada de la velocidad respecto al tiempopara cada coche.
2.3: Una bola A se suelta desde lo más alto de un edificio en el mismo instante en que otra bola B selanza verticalmente hacia arriba desde el suelo. Cuando las bolas se encuentran ambas se mueven enel mismo sentido y la velociad de A es cuatro veces la velocidad de B . ¿En qué fracción de la altura deledificio ocurre el encuentro?Sol.: 1/3h.
2.4: Una partícula que tiene un movimiento uniforme (v = |~v | = Cte) describe la trayectoria que semuestra en la figura, estando situada en el instante inicial en la posición (x0, y0). Obtenga la posiciónde la partícula,~r (t ) en todo instante de tiempo, su vector velocidad~v y aceleración~a. Obtenga tambiénla ecuación de la trayectoria de la partícula, y = y(x).Sol.:~r (t ) = (x0, y0)+ v t (cosα, senα), ~v = v(cosαx+ senαy), ~a = 0; y = y0 + (tanα) (x −x0).
y
x
trayectoria
2.5: Una partícula se mueve en línea recta de forma que en t = 3 s pasa por el origen. Midiendo suvelocidad v respecto al tiempo t , se obtiene la parábola que se muestra (en t = 0 la velocidad es nula,en t =−10s es 1000 cm/s, y en t = 10s vuelve a ser 1000 cm/s). Calcular la aceleración y la posición dela partícula como función del tiempo.Sol.: a = 20t cm/s2, x(t ) =−90+10/3t 3 cm.
−10 −5 0 5 100
100
200
300
400
500
600
700
800
900
1000
t (s)
v (
cm/s
)
2.6: Un automóvil tiene una desaceleración típica de unos 7 m/s2, y el tiempo de reacción típico deun conductor es de 0.5s. Si en una zona escolar debemos circular a una velocidad tal que podamosdetenernos en menos de 4m, (a) ¿A qué velocidad máxima podremos circular? (b) ¿Qué fracción de los4m corresponden al tiempo de reacción?Sol. (a): v0 = 4.76m/s= 17.1km/h; (b): ∼ 60%.
2.7: Una partícula se mueve describiendo la trayectoria que se muestra en la figura (el sentido demovimiento viene dado por las flechas y la partícula se representa por un círculo negro). En el instantemostrado, el módulo de su velocidad va disminuyendo con el tiempo y el módulo de la aceleracióntangencial es el doble que el de la normal: (a) Dibuje el vector aceleración de la partícula de maneraque se aprecie claramente su dirección y sentido. (b) Calcule el ángulo ϕ entre el vector aceleración yel vector velocidad (en radianes).Sol.: ϕ= 3,60rad.
2.8: Una partícula, que en el instante inicial se encuentra en el punto dado por el vector~r0 = 8x+2y mcon velocidad ~v0 = 6y+7z m/s, posee una aceleración ~a(t ) =−27cos(3t )x−12sen(2t )y m/s2. Calcular,para un instante genérico t , el vector de posición de la partícula~r (t ).Sol.:~r (t ) = [8+3cos(3t )] x+ [2+3sen(2t )] y+7t z .
2.9: Un cohete de modelo defectuoso se mueve en el plano X Y (la dirección +Y indica la verticalhacia arriba). La aceleración del cohete tiene componentes dadas por ax = αt 2 y ay = β−γt , donde
α = 2.5 m/s4, β = 9 m/s2 y γ = 1.4m/s3. En t = 0 el cohete está en el origen y tiene velocidad ~v0 =v0x x+v0y y con v0x = 1m/s y v0y = 7m/s. (a) Calcule los vectores de velocidad y posición en función deltiempo. (b) ¿Qué altura máxima alcanza el cohete? (c) ¿Qué desplazamiento horizontal tiene el coheteal volver a y = 0?Sol.: (a) ~v(t ) = (1+5/6t 3)x+ (7+9t −0.7t 2)y,~r (t ) = (t +5/24t 4)x+ (7t +9/2t 2 −7/30t 3)y. (b): 340,5 m.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
2.7. Problemas propuestos 57
2.10: Una partícula sale despedida desde un edificio de altura h con una velocidad inicial ~v0 = v0x x.Cuando la partícula impacta en el suelo, calcule (a) el vector velocidad ~v , (b) el radio de curvatura, ρ.Sol. (a): timp =√
2h/g , ~v(timp) = v0x x−√2g h y; (b): ρ(timp) = (v2
0x +2g h)3/2/(g v0x ).
2.11: Un estudiante está sentado en una plataforma a una altura h sobre el suelo. Lanza un petardohorizontalmente con una velocidad v0 = |~v0|. Sin embargo, un viento que sopla paralelo al suelo impri-me al petardo una aceleración horizontal constante de módulo a0 = |~a0|. El resultado es que el petardocae al suelo directamente abajo del estudiante. Determine la altura h en términos de v0, a0 y g . Ignoreel efecto de la resistencia del aire sobre el movimiento vertical.
2.12: Una manguera arroja agua desde el punto A de la figura a una velocidad inicial de 12 m/s for-mando un ángulo de π/3 con la horizontal. Determinar: (a) El punto del tejado en el que cae el chorrode agua, comprobando que pasa sin tocar el borde del tejado. (b) Las velocidades iniciales máxima ymínima para las cuales el agua cae sobre el tejado. Despreciar el rozamiento con el aire.Sol. (a): x = 8.64m (b): 11.5 ≤ v0(m/s) ≤ 13.3 .
2.13: Una partícula describe un movimiento circular de manera que su posición viene dada por~r (t ) =5cos(3t )x+5sen(3t )y. Los ángulos están en radianes, el tiempo en segundos y las longitudes en metros.Calcular el vector aceleración normal ~an y su aceleración angular α.Sol. ~an = 0, α= 0.
2.14: Una rueda dentada de radio 3 cm gira respecto a un eje que pasa por su centro debido a la acciónde una cremallera rectilínea. En determinado instante, la aceleración de la cremallera es de 15 cm/s2
hacia abajo y su velocidad es de 6 cm/s hacia arriba. Determinar: (a) La velocidad angular, en rad/sy rpm (revoluciones por minuto). (b) La aceleración angular de la rueda dentada. (c) La velocidad yaceleración del diente de la rueda dentada en contacto con la cremallera.Sol. (a): ω= 2rad/s= 19.1r.p.m.; (b): α= 5rad/s2; (c): ~v = 6 ycm/s, ~a =−12 x−15 ycm/s2.
2.15: Un objeto unido a un muelle se mueve a lo largo de una línea recta oscilando alrededor de x = 0,y su posición en un instante t viene dada por la ecuación x(t ) = 5cos(πt )cm (t en s y ángulos en ra-dianes). (a) Si el tiempo se mide en segundos y los ángulos en radianes, ¿qué unidades tiene, en estecaso, el factor π? [Nota: esto no implica que, en otro contexto, el factor π no pueda tener otras dimen-siones]. (b) Representar gráficamente, desde t = 0 s hasta t = 5 s, su posición en función del tiempo. (c)Determinar la amplitud de las oscilaciones. (d) ¿Cuánto tiempo tarda en realizar una oscilación com-pleta? ¿Cuantas veces oscila en un segundo? (e) Determinar su velocidad instantánea y representarlagráficamente en función del tiempo, desde t = 0s hasta t = 5s. (f) ¿En qué puntos y en qué instantes lavelocidad es nula? En esos puntos, ¿cambia de sentido el movimiento del objeto? (g) ¿En qué puntos einstantes la velocidad es máxima?, ¿cuánto vale esa velocidad? (h) Determinar su aceleración instantá-nea y representarla gráficamente en función del tiempo, desde t = 0s hasta t = 5s. (i) ¿En qué puntos yen qué instantes esta aceleración es nula? En esos puntos, ¿cambia de sentido el movimiento del obje-to? (j) ¿En qué puntos e instantes es máxima?, ¿cuánto vale esa aceleración máxima?Sol. (c): Amplitud= 5cm; (d): T = 2s, f = 0.5Hz .
2.16: Una persona en un ascensor ve un tornillo que cae del techo. La altura del ascensor es de 3m.(a) ¿Cuánto tiempo tarda el tornillo en chocar con el suelo si el ascensor asciende con una aceleraciónconstante de 4m/s2? (b) Suponiendo que la velocidad del ascensor era de 16 m/s cuando el tornilloempieza a caer, determinar la distancia que recorre el ascensor y la que recorre el tornillo hasta queéste llega al suelo del ascensor. (c) En el supuesto anterior, ¿qué velocidad tiene el ascensor y el tornilloen el momento del impacto?, ¿cuánto vale la velocidad del tornillo, en el momento del impacto, si loestamos viendo desde dentro del ascensor? (d) Si justo al empezar a caer el tornillo el cable del ascensorse rompiera, ¿cuánto tiempo tardaría el tornillo en impactar con el suelo del ascensor? Suponer despre-ciable el rozamiento con el aire y que, el último apartado es sólo una hipótesis de trabajo, ya que losascensores tienen un sistema de frenado de emergencia para estos casos.Sol. (a): t = 0.66s; (b): Ascensor recorre 11,43 m. Moneda recorre 8,43 m; (c): ~vasc = 18,64 ym/s,~vmon =−9.1 ym/s; (d): Nunca.
2.17: El contrapeso W , partiendo del reposo, desciende con aceleración constante de manera que a los5 s la velocidad relativa de P respecto de W es de 75 cm/s hacia arriba. (a) Determinar las aceleracionesde W y P . (b) La velocidad y posición de W tras 4 s.Nota: En una polea, visto desde su centro, las velocidades y aceleraciones de sus dos extremos debende ser iguales en módulo pero de sentido contrario; en caso contrario la cuerda se rompería.Sol. (a): ~aW =−15/4 ycm/s2, ~aP = 45/4 ycm/s2; (b): ~vW =−15 ycm/s,~rW =−30 ycm.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico

CopiaUso
Académico
TEMA 3
Dinámica de la partícula
3.1. Leyes de Newton
En el capítulo anterior dedicado a la cinemática, hemos descrito el movimien-to de las partículas en función de las definiciones de los vectores de posición, velo-cidad y aceleración. Pero no hemos definido aún la causa que hace que los objetosse muevan de la forma en que lo hacen. Nos gustaría poder responder a preguntasgenerales relacionadas con las causas del movimiento tales como “¿qué mecanis-mo hace que se produzca una variación en el movimiento?” o “¿por qué algunosobjetos aceleran con velocidades mayores que otros?” En este tema describiremosla variación en el movimiento de las partículas utilizando los conceptos de fuer-za y masa. Estos conceptos están fundamentados en tres leyes fundamentales delmovimiento, basadas a su vez en observaciones experimentales, formuladas hacemás de tres siglos por Isaac Newton. Estas leyes son las siguientes:
Todo cuerpo en reposo sigue en reposo a menos que sobre élactúe una fuerza externa. Un cuerpo con movimiento uniformecontinúa moviéndose con velocidad contante a menos que so-bre él actúe una fuerza externa.
Primera Ley de Newton
La aceleración de un cuerpo tiene la misma dirección y es pro-porcional a la fuerza externa neta que actúa sobre él. La cons-tante de proporcionalidad recibe el nombre de masa.La fuerza neta que actúa sobre un cuerpo es la suma (vectorial)de todas las fuerzas que actúan sobre él.
Segunda Ley de Newton
Las fuerzas siempre actúan por pares de la misma magnitudy sentidos opuestos. Si el cuerpo A ejerce una fuerza sobre elcuerpo B , éste ejerce una fuerza con el mismo módulo pero consentido contrario sobre el cuerpo A.
Tercera Ley de Newton
A continuación discutiremos algunas de las consecuencias más relevantes quese derivan de cada una de estas leyes.
59

CopiaUso
Académico
60 Tema 3. Dinámica de la partícula
3.1.1. Primera ley de Newton: Ley de la Inercia
Si empujamos un trozo de hielo sobre una mesa, observamos que desliza yluego se para. Si la mesa está húmeda, el hielo recorre una distancia mayor antesde pararse y el cambio de velocidad es menor. Antes de Galileo se creía que unafuerza, tal como un empuje o un tirón, era siempre necesaria para mantener uncuerpo en movimiento con velocidad constante. Galileo, y posteriormente New-ton, reconocieron que si los cuerpos se detienen en su movimiento es debido a laexistencia de una fuerza: rozamiento (o fricción). Si este rozamiento se reduce, elcambio de velocidad también lo hace. Una capa de agua o de aire son especial-mente efectivos para reducir el rozamiento, permitiendo que el objeto se desli-ce una gran distancia con un pequeño cambio en su velocidad. Según Galileo, sise eliminan todas las fuerzas externas, su velocidad no cambiará, una propiedadde la materia que él describía como su inercia. Esta conclusión, reformulada porNewton como su primera ley, se llama también ley de la inercia.
Sistemas de referencia inerciales
La primera ley de Newton no distingue entre un objeto en reposo y un objetoque se mueve con velocidad constante distinta de cero. El hecho de que un objetoesté en reposo o en movimiento con velocidad constante depende del sistema dereferencia en el cual se observa el objeto. Consideremos una pelota situada en labandeja del asiento de un avión que vuela en una trayectoria horizontal. En unsistema de coordenadas ligado al avión (es decir, en el sistema de referencia delavión) la pelota está en reposo, y permanecerá en reposo relativo al avión en tantoeste vuele con velocidad constante. Supongamos ahora que el piloto aumenta lapotencia de los motores y el avión, de forma brusca, acelera (con respecto al sue-lo). Observaremos que la pelota, de repente, retrocede acelerando con respecto alavión incluso cuando no actúa ninguna fuerza sobre ella.
Acabamos de ver que en un sistema de referencia acelerado no se cumple laprimera ley de Newton. Así pues, usamos la primera ley de Newton para determi-nar si un sistema de referencia es inercial o no. Es decir, si sobre un objeto no actúaninguna fuerza, cualquier sistema de referencia con respecto al cual la aceleraciónes cero, es un sistema de referencia inercial.
Tanto el avión cuando se mueve a velocidad constante, como el suelo, sonuna buena aproximación de sistemas de referencia inerciales. Cualquier sistemade referencia que se mueve a velocidad constante con respecto a un sistema dereferencia inercial es también un sistema de referencia inercial.
Un sistema de referencia ligado a la superficie de la Tierra no es totalmenteinercial a causa de la pequeña aceleración de la superficie de la Tierra, la cual sedebe, a su vez, a la revolución alrededor del Sol. Sin embargo, como estas acelera-ciones son del orden de 0.01 m/s2 (o menos), podemos considerar que aproxima-damente un sistema de referencia ligado a la superficie de la Tierra es inercial.
El concepto de sistema de referencia inercial es crucial porque las leyes deNewton son válidas sólo en sistemas de referencias inerciales.
Actividad 3.1:
¿Qué característica debe tener la trayectoria de una partícula para quepodamos asegurar que sobre ella no actúa ninguna fuerza?
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.1. Leyes de Newton 61
3.1.2. Segunda Ley de Newton. Fuerza y masa
La primera y la segunda ley de Newton nos permiten definir el concepto defuerza. Una fuerza es una influencia externa sobre un cuerpo que causa su acele-ración respecto a un sistema de referencia inercial. La dirección y sentido de unafuerza coinciden con la dirección y sentido de la aceleración causada. El módulode la fuerza es el producto de la masa del cuerpo por el módulo de la aceleración.La siguiente ecuación muestra matemáticamente esta ley:
~F = m~a . (3.1) Formulación matemática dela Segunda Ley de Newton
Los objetos se resisten instrínsecamente a ser acelerados. Imaginemos que da-mos una patada a una pelota de fútbol y a una bola grande ce acero; esta última seresiste mucho más a ser acelerada que la pelota de fútbol. Esta propiedad intrínse-ca de los objetos es la masa. En consecuencia, la masa es una medida de la inercia(resistencia al cambio del estado de movimiento) del cuerpo. La relación entre dosmasas se define cuantitativamente aplicando la misma fuerza y comparando susaceleraciones. Si la fuerza F produce una aceleración a1 cuando se aplica a uncuerpo de masa m1, y la misma fuerza produce la aceleración a2 cuando se aplicaa un objeto de masa m2, el cociente entre las masas se define por
m2
m1= a1
a2.
Esta definición está de acuerdo con nuestra idea intuitiva de masa. Si la mismafuerza se aplica a dos objetos, el objeto de más masa es el que menos se acelera.Experimentalmente se deduce que la relación a1/a2, obtenida cuando fuerzas deidéntica magnitud actúan sobre dos cuerpos, es independiente del módulo, di-rección o del tipo de fuerza utilizada. La masa de un cuerpo es una propiedadintrínseca de mismo y, por lo tanto, no depende de la localización del cuerpo ni
La masa es una propiedad intrínseca
de la fuerza que sobre él actúa. Es decir, la masa de un cuerpo continúa siendo lamisma si el cuerpo está sobre la Tierra, sobre la Luna o en el espacio exterior.
Experimentalmente se encuentra que si sobre un cuerpo actúan dos o másfuerzas, la aceleración que causan es igual a la que causaría sobre el cuerpo unasola fuerza igual a la suma vectorial de las fuerzas individuales. Esto se conoce co-mo principio de superposición. En consecuencia, las fuerzas se combinan comolos vectores, y la segunda ley de Newton puede expresarse de la forma∑
i
~Fi = ~Fneta = m~a . (3.2) Principio de superposición
Fuerza debida a la gravedad: el peso
Si dejamos caer un objeto cerca de la superficie terrestre, el objeto acelera ha-cia la Tierra. Si podemos despreciar la resistencia del aire, todos los objetos poseenla misma aceleración, llamada aceleración de la gravedad ~g , en cualquier puntodel espacio. La fuerza que causa esta aceleración es la fuerza de la gravedad so-bre el objeto, llamado peso del mismo, ~P .1 Si el peso es la única fuerza que actúa
1 Referirse a la fuerza de gravedad como el peso es desafortunado ya que parece implicar que el pesoes una propiedad del objeto más que una fuerza externa que actúa sobre él. Para evitar caer en estainterpretación aparente, cada vez que leamos “el peso” mentalmente traduciremos esta denomina-ción como “la fuerza gravitatoria”
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
62 Tema 3. Dinámica de la partícula
sobre un objeto, se dice que este se encuentra en caída libre. Si la masa es m, lasegunda ley de Newton define el peso de la siguiente forma:
~P = m~g . (3.3)Peso (fuerza gravitatoria)
Como ~g es idéntico para todos los cuerpos, llegamos a la conclusión de queel peso de un cuerpo es proporcional a su masa. El vector ~g se denomina campogravitatorio terrestre y es la fuerza por unidad de masa ejercida por la Tierra sobrecualquier objeto. Es igual a la aceleración en caída libre experimentada por unobjeto. Cerca de la superficie terrestre g tiene el valor
g = 9.81m/s2 .
Medidas cuidadosas muestran que ~g varía con la posición. En particular, enun punto por encima de la superficie terrestre, ~g apunta hacia el centro de la Tie-rra y varía inversamente con el cuadrado de la distancia a dicho punto. Así pues,un cuerpo pesa ligeramente menos cuando se encuentra en lugares muy elevadosrespecto al nivel del mar. El campo gravitatorio también varía ligeramente con lalatitud debido a que la Tierra no es exactamente esférica, sino que está achatadapor los polos. Por lo tanto, el peso, a diferencia de la masa, no es una propiedadintrínseca del cuerpo. Aunque el peso de un cuerpo depende del lugar donde es-té situado debido a las variaciones de g , el cambio en el peso es prácticamentedespreciable para la mayor parte de las aplicaciones prácticas sobre o cerca de lasuperficie terrestre.
Un ejemplo puede clarificar la diferencia entre masa y peso. Supongamos queen la Luna tenemos una bola de acero. Su peso es la fuerza gravitatoria que ejercela Luna sobre ella, pero esta fuerza es solo una sexta parte de la fuerza que seejerce sobre la bola cuando está en la Tierra, por lo que para levantar la bola enella se necesita una sexta parte de la fuerza. Sin embargo, lanzar la bola con ciertavelocidad horizontal requiere la misma fuerza en la Luna que en la Tierra, o en elespacio libre.
Aunque el peso de un objeto puede variar de un lugar a otro, para un mismolugar, su peso siempre será proporcional a su masa. Así pues, podemos compararconvenientemente las masas de dos objetos en un lugar determinado comparan-do sus pesos.
La sensación que tenemos de nuestro propio peso procede de las demás fuer-zas que lo equilibran. Por ejemplo, al estar sentados en una silla, apreciamos lafuerza ejercida por ella que equilibra nuestro peso, y por lo tanto evita que noscaigamos al suelo. Cuando estamos situados sobre una balanza de muelles, nues-tro pies aprecian la fuerza ejercida sobre nosotros por la balanza. Esta balanzaestá calibrada de modo que registra la fuerza que debe ejercer (por compresiónde su muelle) para equilibrar nuestro peso. La fuerza que equilibra nuestro pesose denomina peso aparente. Este peso aparente es el que viene dado por una ba-lanza de muelle. Si no existiese ninguna fuerza para equilibrar nuestro peso, comosucede en la caída libre, el peso aparente sería cero. Esta condición, denominadaingravidez, es la que experimentan los astronautas en los satélites que giran al-rededor de la Tierra. La única fuerza que actúa sobre el satélite es la gravedad (supeso). El astronauta está también en caída libre. La única fuerza que actúa sobreél es su peso, que produce la aceleración ~g . Como no existe ninguna fuerza queequilibre la fuerza de la gravedad, el peso aparente del astronauta es cero.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.1. Leyes de Newton 63
Unidades de fuerza y masa
Podemos establecer una escala de masas eligiendo un cuerpo patrón y asig-nándole la masa de 1 unidad. Como vimos en el capítulo anterior, el cuerpo elegi-do como patrón es un cilindro de una aleación de platino e iridio que se conservaen la Oficina Internacional de Pesos y Medidas en Sèvres, y se le asigna la masa de1 kilogramo, la unidad S.I. de masa. La fuerza necesaria para producir una acele-ración de 1 m/s2 sobre el cuerpo patrón es por definición 1 newton (N). Según lasegunda ley de Newton, 1 N=1 kg·m/s2.
Unidad de fuerza: 1 N (newton)
La unidad patrón de masa conveniente en física atómica y nuclear es la uni-dad de masa atómica o uma (u) que se define como la doceava parte de la masadel átomo neutro de carbono-12 (12C). La uma está relacionada con el kilogramopor
1 u = 1.66540×10−27 kg
La masa de un átomo de hidrógeno es aproximadamente 1 u.
Otra unidad de fuerza muy usada es el kilopondio (kp), también denomina-do frecuentemente kilogramo-fuerza (kgf). Se define como aquella fuerza queimprime una aceleración igual a la gravitatoria a una masa de un kilogramo. Enconsecuencia,
1 kp = 1 kgf = 9.81 N
Actividad 3.2:
¿Puede “deducirse” la primera y/o la segunda ley de Newton?
¿Cómo podemos conocer la fuerza que actúa sobre una partícula?
Explique las razones por las que las siguientes afirmaciones son verda-deras o falsas:
• La misma fuerza actuando sobre diferentes partículas produce lamisma aceleración.
• La dirección de la velocidad de una partícula es siempre la mismaque la de la fuerza que actúa sobre ella.
• La dirección de la velocidad de una partícula no siempre es la mis-ma que la de la fuerza que actúa sobre ella.
• Dos fuerzas de la misma magnitud actuando sobre una partículaproducen una aceleración doble a la que habría si solo actúa unade ellas.
¿Qué significa que la masa es una propiedad intrínseca de la materia,pero no su peso?
¿Por qué no usamos las unidades del S.I. de fuerza (newtons) en lastiendas para referirnos al peso (fuerza gravitatoria)?
Cuando nos pesamos en una báscula de “cuarto de baño” ¿Qué mag-nitud exactamente nos mide el dial de dicha báscula? ¿Podría ocurrirque el dial de esta báscula (peso aparente) nos diera una lectura nula?
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
64 Tema 3. Dinámica de la partícula
3.1.3. La tercera ley de Newton. Acción y reacción
Cuando dos cuerpos interaccionan mutuamente, se ejercen fuerzas entre sí.La tercera ley de Newton establece que estas fuerzas son iguales en módulo y vandirigidas en sentidos opuestos. Es decir, si un objeto A ejerce una fuerza ~FA,B so-bre un objeto B , el objeto B ejerce una fuerza ~FB ,A sobre el objeto A que es igualen módulo y de sentido opuesto a la anterior. Es decir,
~FA,B =−~FB ,A .
Así, las fuerzas se dan en pares. Es común referirse a estas fuerzas como ac-ción y reacción; sin embargo, esta terminología es desafortunada porque parececomo si una fuerza reaccionara a la otra, lo cual no es cierto, ya que ambas fuerzasactúan simultáneamente. Si una fuerza externa que actúa sobre un objeto parti-Las fuerzas de acción y reacción
actúan sobre objetos diferentes cular es denominada “fuerza de acción”, la correspondiente “fuerza de reacción”debe actuar sobre un objeto diferente. Así, en ningún caso, dos fuerzas externasque actúan sobre un único objeto constituyen un par de fuerzas acción-reacción.
En la figura se muestra una caja que descansa sobre un mesa. La fuerza haciaabajo que actúa sobre la caja es el peso ~P debido a la atracción de la Tierra. La cajaejerce sobre la Tierra una fuerza igual y de signo contrario ~P ′ =−~P . Estas fuerzasforman pues un par acción-reacción. Si fueran las únicas fuerzas presentes, el blo-que se aceleraría hacia abajo y la Tierra se aceleraría hacia arriba. Sin embargo, lamesa ejerce sobre la caja una fuerza hacia arriba ~N que compensa el peso. La ca-ja también ejerce una fuerza sobre la mesa ~N ′ =−~N hacia abajo. Las fuerzas ~N y~N ′ forman otro par acción-reacción. En definitiva, las fuerzas que actúan sobre lacaja son ~P y ~N , y las restantes actúan sobre otros objetos.
Actividad 3.3:
¿Existe alguna situación donde no exista fuerza de reacción?
¿Por qué se afirma que denominar a las fuerzas como “acción” y “reac-ción” es desafortunado?
Dado que la magnitud de la fuerza de acción es siempre igual a la dereacción y de sentido opuesto, la fuerza que actúa sobre una partículaes siempre nula. ¿Verdadero o Falso? Razone su respuesta.
Si la Tierra me atrae y yo atraigo a la Tierra, ¿por qué no se observa quese acelera la Tierra?
Si al empujar yo una pared, ésta reacciona y ejerce una fuerza sobremí, ¿por qué observo que no me acelero en sentido contrario?
Cuando interactúan más de dos cuerpos ¿puede aplicarse la tercera leyde Newton que únicamente hace referencia a la interacción entre doscuerpos?
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.2. Clasificación de las fuerzas 65
3.2. Clasificación de las fuerzas
La gran potencia de la segunda ley de Newton se manifiesta cuando se combi-na con las leyes de las fuerzas que describen las interacciones entre objetos. En es-ta sección describiremos los diferentes tipos de fuerzas presente en la Naturaleza.En primer lugar, mostraremos que todas las fuerzas de la Naturaleza surgen comouna manifestación de cuatro tipos de fuerzas fundamentales. Posteriormente, semostrará otra clasificación de las fuerzas dependiendo de si estas actúan a distan-cia o, si por el contrario, son fuerzas de contacto.
3.2.1. Interacciones fundamentales
Todas las fuerzas de la naturaleza pueden considerarse como la composiciónde una serie de fuerzas o interacciones fundamentales:
1. Fuerza gravitatoria
2. Fuerza electromagnética
3. Fuerza nuclear fuerte
4. Fuerza nuclear débil.
Analizaremos a continuación estas fuerzas de forma individual.
Fuerza gravitatoria. La fuerza gravitatoria es la fuerza de atracción mutua entredos objetos cualesquiera del Universo. Es interesante y bastante curioso que, aun-que la fuerza gravitatoria puede ser muy fuerte entre objetos macroscópicos, es lafuerza más débil de las fuerzas fundamentales. Por ejemplo, la fuerza gravitatoriaentre el electrón y el protón en el átomo de hidrógeno tiene un módulo con un or-den de magnitud de 10−47 N, mientras que la fuerza electromagnética entre estasmismas partículas es del orden de 10−7 N.
Además de sus contribuciones a la comprensión del movimiento, Newton es-tudió en profundidad la fuerza de la gravedad. La ley de la gravitación universalde Newton establece que toda partícula del Universo atrae a otras partículas conuna fuerza que es directamente proporcional al producto de las masas de las par-tículas e inversamente proporcional al cuadrado de la distancia entre ellas. Si laspartículas tienen masas m1 y m2 y se encuentran separadas por una distancia r ,el módulo de la fuerza gravitatoria es
Fg =Gm1m2
r 2
donde G = 6.67×1011 N·m2/kg2 es la constante universal de gravitación.
Fuerza electromagnética. La fuerza electromagnética es la fuerza que une a losátomos y moléculas en compuestos para formar la materia. Es mucho más inten-sa que la fuerza gravitatoria. La fuerza que hace que un bolígrafo que se ha frotadocontra una prenda de lana atraiga trocitos de papel y la fuerza que un imán ejer-ce sobre un clavo de hierro son fuerzas electromagnéticas. En esencia, todas lasfuerzas que operan en nuestro mundo macroscópico, dejando aparte la fuerzagravitatoria, son manifestaciones de la fuerza electromagnética. Por ejemplo, las
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
66 Tema 3. Dinámica de la partícula
fuerzas de rozamiento, las fuerzas de tensión y las fuerzas elásticas de los mue-lles son consecuencia de las fuerzas electromagnéticas existentes entre partículascargadas que se encuentran próximas entre sí.
La fuerza electromagnética implica dos tipos de partículas: aquellas que tie-nen carga positiva y aquellas otras que tienen carga negativa. A diferencia de lafuerza gravitatoria, que siempre es una interacción atractiva, la fuerza electro-magnética puede ser de atracción o de repulsión, dependiendo de la carga de laspartículas. La ley de Coulomb proporciona el módulo de la fuerza electrostáticaFe entre dos partículas cargadas separadas una distancia r :
Fe = keq1q2
r 2
donde q1 y q2 son las cargas de dos partículas, medidas en unidades denominadasculombios (C), y ke = 8.99×109 N·m2/C2 es la constante de Coulomb. Obsérveseque la fuerza electrostática tiene la misma forma matemática que la ley de gravita-ción universal de Newton, con la carga haciendo el papel matemático de la masa yutilizándose la constante de Coulomb en lugar de la constante de gravitación uni-versal. La fuerza electrostática es una fuerza de atracción si las dos cargas tienensignos opuestos, y es una fuerza de repulsión si las dos cargas tienen el mismosigno.
La cantidad más pequeña de carga aislada que se ha podido encontrar en laNaturaleza (hasta el momento), es la carga de un electrón o de un protón. Estaunidad fundamental de carga se designa mediante el símbolo e y tiene el valore = 1.60×10−19 C. Una serie de teorías desarrolladas en la segunda mitad del si-glo XX proponen que los protones y neutrones están formados por unas partículasmás pequeñas, denominadas quarks, que tienen cargas 2e/3 o −e/3. Aunque sehan encontrado pruebas experimentales de la existencia de tales partículas en elinterior de la materia nuclear, no se han detectado nunca quarks libres.
Fuerza nuclear fuerte. Un átomo consta de un núcleo cargado positivamentey extremadamente denso, rodeado por una nube de electrones cargada negati-vamente, estando los electrones atraídos hacia el núcleo por la fuerza eléctrica.Dado que todos los núcleos, excepto el del hidrógeno, son combinaciones de pro-tones cargados positivamente y neutrones con carga neutra (denominados, deforma colectiva, nucleones), ¿por qué la fuerza electrostática de repulsión entrelos protones no hace que el núcleo se rompa? Evidentemente, existe una fuerzade atracción que contrarresta la fuerza electrostática extremadamente intensa derepulsión y que es responsable de la estabilidad del núcleo. Esta fuerza que unelos nucleones para formar el núcleo se denomina fuerza nuclear fuerte. A dife-rencia de las fuerzas gravitatoria y electromagnética, que dependen inversamen-te del cuadrado de la distancia, la fuerza nuclear fuerte tiene un alcance extre-madamente pequeño y su intensidad decrece muy rápidamente fuera del núcleo,siendo despreciable para distancias de separación mayores que 10−14 m, aproxi-madamente. Para una distancia de separación de unos 10−15 m (una dimensiónnuclear típica) la fuerza nuclear es aproximadamente dos órdenes de magnitudmás alta que la fuerza electrostática.
Fuerza nuclear débil. La fuerza nuclear débil es una fuerza de alcance muy pe-queño que tiende a producir inestabilidad en determinados núcleos. La primeravez que se observó fue en las sustancias radiactivas naturales, y posteriormentese vio que juega un papel clave en la mayoría de las reacciones de desintegraciónradiactiva. La fuerza nuclear débil es aproximadamente 1025 veces más fuerte quela fuerza gravitatoria y unas 1012 veces más débil que la fuerza electromagnética.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.2. Clasificación de las fuerzas 67
Actividad 3.4:
Si todos los cuerpos están hechos de átomos que tienen cargas eléctri-cas, ¿por qué sólo se considera la fuerza gravitatoria cuando hablamosdel movimiento planetario?
¿Tienen relevancia las fuerzas electrostáticas en nuestra vida diaria? Sies así, ponga ejemplos claros de ello.
¿Qué detectores de fuerzas gravitatorias tiene nuestro cuerpo? ¿Y defuerzas electromagnéticas?
¿Tienen algún uso terapéutico las fuerzas nucleares?
3.2.2. Acción a distancia y contacto
Existe una clasificación de las fuerzas complementaria a la anteriormente ex-puesta. Consiste en dividir las fuerzas en dos tipos fundamentales: fuerzas de ac-ción a distancia y fuerzas de contacto. Esta clasificación es muy útil a la hora deanalizar los problemas desde un punto de vista dinámico y para nosotros será defundamental importancia.
Fuerzas de acción a distancia
Las interacciones gravitatoria y electromagnética actúan entre partículas se-paradas en el espacio. Esto crea un problema conceptual llamado “acción a dis-tancia.” Newton consideraba la acción a distancia como una cuestión incompletay no suficientemente comprendida en su teoría de la gravitación, pero evitaba darcualquier otra hipótesis. Hoy, esta cuestión se “resuelve” introduciendo el con-cepto de campo, que actúa como un agente intermedio. Por ejemplo, la atracciónde la Tierra por el Sol se considera en dos etapas. El Sol crea una condición enel espacio que llamamos campo gravitatorio. Este campo gravitatorio ejerce unafuerza sobre la Tierra. Nuestro peso es la fuerza ejercida por el campo gravitatoriode la Tierra sobre nosotros mismos. En la segunda parte de la asignatura, cuandoestudiemos la electricidad y el magnetismo analizaremos los campos eléctricos(producidos por cargas eléctricas) y magnéticos (producidos por cargas eléctricasen movimiento).
Fuerzas de contacto
La mayor parte de las fuerzas ordinarias que observamos sobre los objetos (ex-cepto el peso) se ejercen por contacto directo; entendiendo este “contacto” en unsentido macroscópico. Estas fuerzas son de origen electromagnético y se ejercenentre las moléculas/átomos de la superficie de cada objeto. Veamos a continua-ción algunas manifestaciones de estas fuerzas de contacto.
Sólidos. Si empujamos una superficie, esta devuelve el empuje, según se dedu-ce de la tercera ley de Newton. Consideremos una escalera que se apoya contrauna pared [Figura 3.1(a)]. En la región de contacto, la escalera empuja la paredcon una fuerza horizontal, comprimiendo las moléculas de la superficie de la pa-red. De forma similar a los muelles de un colchón, las moléculas comprimidas de
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
68 Tema 3. Dinámica de la partícula
Fuerza Normal
Fuerza Rozamiento
(a) (b)
FIGURA 3.1: (a) La pared sostiene la escalera ejerciendo sobre ella una fuerzanormal a la pared. (b) La fuerza de rozamiento ejercida por el suelo sobre elbloque se opone a su desplazamiento o a su tendencia a deslizar.
la pared empujan la escalera con una fuerza horizontal. Tal fuerza perpendicu-lar a las superficies de contacto se denomina fuerza normal (en este contexto, ladenominación normal quiere decir perpendicular). La superficie soporte se de-forma ligeramente en respuesta a la carga, si bien esta deformación no se apreciafácilmente a simple vista.
Las fuerzas normales pueden variar dentro de un amplio intervalo de valores.Una mesa, por ejemplo, ejerce una fuerza normal dirigida hacia arriba sobre cual-quier bloque que esté colocado sobre ella. A menos que el bloque sea tan pesadoque la mesa se rompa, esta fuerza equilibrará la fuerza del peso del bloque. Ade-más, si presionamos hacia abajo el bloque, la mesa ejercerá una fuerza soportemayor que el peso del bloque para evitar que éste se acelere hacia abajo.
En ciertas circunstancias, los cuerpos en contacto ejercerán entre sí fuerzasparalelas a las superficies en contacto. Consideremos el bloque de la Figura 3.1(b).Si se le empuja suavemente de lado no resbalará ya que la fuerza ejercida por elsuelo se opone a que el bloque deslice. Si, en cambio, se empuja fuertemente, elbloque empezará a moverse en el sentido de la fuerza. Para mantener el movi-miento es necesario ejercer continuamente una fuerza. A partir del instante enque se deja de empujar, el bloque ralentizará su movimiento hasta que se detie-ne. La componente paralela de la fuerza de contacto ejercida por un cuerpo sobreotro se denomina fuerza de rozamiento.
Aunque las fuerzas de rozamiento y normal se muestran en las figuras comosi actuaran en un único punto, en realidad, se distribuyen sobre toda la región decontacto. Las fuerzas de rozamiento se tratan con más detalle en la Sección 3.3.3.
Sin rozamiento no podríamos andar
El rozamiento es crucial para que tengan lugar muchos fenómenos observa-dos en la Naturaleza. No sería posible ni caminar ni desplazarnos en automóvil sino existiera el rozamiento. Para empezar a andar hace falta el rozamiento y, unavez en marcha, para cambiar la dirección o la velocidad del movimiento tambiénhace falta rozamiento. Se necesita rozamiento para mantener una tuerca en untornillo o un clavo en la madera. Sin embargo, aunque el rozamiento sea tan im-portante, muchas veces intentamos evitarlo. Los lubricantes, como el aceite delmotor de un coche o el líquido sinovial en nuestro cuerpo, son materiales quereducen el rozamiento.
Cuando aplicamos una pequeña fuerza horizontal a un gran bloque que des-cansa sobre el suelo, se observa que el bloque no se mueve debido a la fuerzade rozamiento estático, ~Fe , ejercida por el suelo sobre el bloque, que equilibrala fuerza que estamos aplicando (ver figura). La fuerza de rozamiento estático,que se opone a la fuerza aplicada sobre el bloque, puede variar desde cero hasta
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.2. Clasificación de las fuerzas 69
cierto valor máximo, Fe,max, dependiendo de la fuerza externa ejercida. Los expe-rimentos muestran que Fe,max es proporcional a la fuerza normal ejercida por unasuperficie sobre la otra,
Fe,max =µe N (3.4)
donde la constante de proporcionalidad µe , llamada coeficiente de rozamiento
µe Coeficiente de rozamiento estático
estático, depende la naturaleza de las superficies en contacto. Si ejercemos unafuerza horizontal menor que Fe,max sobre el bloque, la fuerza de rozamiento equi-librará esta fuerza horizontal. En general, podemos escribir
Fe ≤µe N . (3.5)
Si se empuja el bloque con una fuerza mayor que Fe,max, este deslizará so-bre el suelo. Al deslizar, el suelo ejerce una fuerza de rozamiento dinámico, ~Fd ,que se opone al sentido de movimiento. Para que el bloque deslice con velocidadconstante debe ejercerse una fuerza sobre el bloque igual en módulo y de sentidoopuesto a la fuerza de rozamiento dinámico ejercida por el suelo.
El coeficiente de rozamiento dinámico µd se define como el cociente entrelos módulos de la fuerza de rozamiento dinámico Fd y la fuerza normal N ,
Fd =µd N (3.6)
dependiendo este coeficiente de la naturaleza de las superficies en contacto. Ex-
µd Coeficiente rozamiento dinámico
perimentalmente se encuentra que µd < µe y que µd es aproximadamente cons-tante para velocidades comprendidas en el intervalo de algunos cm/s a variosm/s. En general supondremos que la fuerza de rozamiento dinámico es constante.
La figura adjunta muestra gráficamente la fuerza de rozamiento ejercida sobreel bloque, Froz, por el suelo en función de la fuerza aplicada, Fapl. La fuerza derozamiento va compensando la fuerza aplicada hasta que esta alcanza el valorµe N , que es cuando la caja empieza a moverse. A partir de entonces, la fuerza derozamiento (dinámica) es µd N .
Muelles. Cuando un muelle se comprime o se alarga una pequeña distancia∆x,la fuerza que se ejerce, según se demuestra experimentalmente es
Fx =−k∆x
donde k es la denominada constante elástica del muelle, y constituye una medi-da de su rigidez. El signo negativo de la ecuación anterior significa que cuandoel muelle se estira o comprime, la fuerza que ejerce es de sentido opuesto. Estaecuación, conocida como ley de Hooke es de gran interés. Para pequeños despla-zamientos, casi todas las fuerzas de restitución obedecen la ley de Hooke. Volve-remos a esta ley en la Sección 3.5 cuando consideremos el movimiento armónicosimple.
Cuerdas. Un cuerpo se puede arrastrar y mover mediante una cuerda o una ca-dena. Se puede suponer que una cuerda es como un muelle pero con una cons-tante elástica muy grande, de forma que la deformación que adquiere al aplicaruna fuerza es despreciable. Las cuerdas, sin embargo, no son rígidas ya que se fle-xionan y se tuercen y, por lo tanto, no pueden usarse para empujar objetos (comolo hacen los muelles) sino que únicamente pueden tirar de ellos. El módulo de lafuerza que un trozo de una cuerda ejerce sobre otro adyacente se denomina ten-sión. Por lo tanto, si se tira de un objeto con una cuerda, la magnitud de la fuerzacoincide con la tensión.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
70 Tema 3. Dinámica de la partícula
La tensión puede variar a través de la cuerda, como es el caso de una cuerdapesada que cuelga del techo; en ese caso, la tensión en el trozo de cuerda queestá junto al techo es mayor, ya que en esa zona se aguanta también el peso detoda la cuerda. Sin embargo, en los problemas que trataremos en este curso, nose suele considerar la masa de las cuerdas, de forma que la variación de la tensióndebida al peso de la cuerda se considerará despreciable. También despreciaremoslas variaciones de tensión debidas a alguna aceleración de la cuerda.
Ligaduras. Un tranvía que se mueve por un raíl, un caballo de madera de untiovivo que se mueve en una circunferencia o un trineo que se mueve por la su-perficie de un estanque helado en un plano horizontal, son ejemplos de sistemasen los que existen un condicionante sobre el movimiento. Estos condicionantesreciben el nombre de ligaduras.
Actividad 3.5:
¿Qué fuerza de acción a distancia siempre estará presente en nuestrosproblemas de dinámica sobre la superficie (o a cierta altura) de la Tie-rra? ¿Producirá esta fuerza siempre una aceleración sobre los objetos?
Para que existan fuerzas de contacto, ¿debe haber contacto físico entrelos objetos?
Si dos objetos sólidos tienen contacto físico en cuatro puntos, ¿cuántasfuerzas de contacto habrá en total entre ellos? ¿Y sobre cada uno deellos?
¿Por qué separamos las fuerzas de contacto en sus componentes nor-mal y tangencial a la superficie de contacto?
Si deja caer un objeto de vidrio suavemente sobre el suelo, éste no serompe. Pero si lo deja caer desde cierta altura, sí se rompe. Expliquela diferencia entre las dos situaciones desde un punto de vista de lasfuerzas implicadas sobre el objeto.
La tensión en una cuerda, ¿es una fuerza de acción a distancia o decontacto? ¿Y la fuerza de un muelle?
En la situación mostrada en la figura dibuje todas las fuerzas decontacto y las de acción a distancia que actúan sobre los objetos 1, 2,y 3.
cuerdaobj. 1
obj. 2
obj. 3
Si en el problema anterior hace un balance global de las fuerzas queactúan sobre los objetos 1, 2, y 3: ¿cuáles de ellas se anulan?, ¿tieneesto algo que ver con la tercera ley de Newton?
¿Qué diferencia fundamental no-trivial existe entre la fuerza de roza-miento estática y la dinámica?
¿Variará la fuerza de rozamiento dinámica de un cuerpo que se muevesobre una superficie horizontal en función de su velocidad?
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.3. Resolución de problemas. Diagramas de fuerzas 71
3.3. Resolución de problemas. Diagramas de fuerzas
3.3.1. Sistemas aislados
Supongamos un trineo tirado por un perro que avanza por un terreno helado.El perro tira de una cuerda ligada al trineo (ver figura) con una fuerza horizontalque hace que este gane velocidad. Podemos pensar en el sistema formado por eltrineo y la cuerda como un único cuerpo, ya que nunca se separan. ¿Qué fuerzasactúan sobre el cuerpo trineo-cuerda? Tanto el perro como el hielo tocan el cuer-po, de modo que ambos ejercen fuerzas sobre él. También sabemos que la Tierraejerce una fuerza gravitatoria sobre el trineo (el peso del cuerpo). Resumiendo, es-tas tres fuerzas actúan sobre el cuerpo (suponiendo el rozamiento despreciable):
1. El peso del cuerpo, ~P .
2. La fuerza de contacto ~N ejercida por el hielo (sin rozamiento, esta fuerza esperpendicular al hielo).
3. La fuerza de contacto ~F ejercida por el perro.
Un diagrama que muestra esquemáticamente todas las fuerzas que actúan so-bre un sistema, tal como el de la figura, se denomina diagrama del sistema ais-lado. Esta denominación se basa en el hecho de que el cuerpo se dibuja sin suentorno. Para dibujar a escala los vectores fuerza en un diagrama de fuerzas desistema aislado es necesario determinar primero, usando métodos cinemáticos,la dirección del vector aceleración. Sabemos que el objeto se mueve hacia la de-recha con velocidad creciente y, por lo tanto, que el vector aceleración va en ladirección de su movimiento hacia la derecha.
Aplicamos la segunda ley de Newton (3.2) a nuestro problema, descompo-niendo las fuerzas y la aceleración en sus componentes x e y . Así, para las com-ponentes x nos da ∑
Fx = Nx +Px +Fx = max
0+0+F = ma
esto es,
a = F
m.
Teniendo en cuenta que el cuerpo no acelera verticalmente, tenemos para la com-ponente y : ∑
Fy = Ny +Py +Fy = may
N −P +0 = 0
de donde obtenemos que
N = P = mg .
En este ejemplo simple hemos determinado dos magnitudes: la aceleración hori-zontal, a = F /m y la fuerza vertical N ejercida por el hielo, N = mg .
A partir de este ejemplo se ilustra un método general y sistemático para la re-solución de problemas usando las leyes de Newton. Es muy importante reconecerla importancia de tener un método sistemático y aprender a usarlo.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
72 Tema 3. Dinámica de la partícula
1. Dibujar un diagrama claro.
2. Aislar el objeto que nos interesa y dibujar un diagrama que muestre todas lasfuerzas que actúan sobre el objeto. Si existe más de un objeto de interés enel problema, dibujar un diagrama para cada uno de ellos. Elegir un sistemade coordenadas conveniente para cada objeto e incluirlo en el diagrama defuerzas para este objeto. Si se conoce la dirección de la aceleración, se elige uneje de coordenadas que sea paralelo a ella.
3. Aplicar la segunda ley de Newton en forma de componentes.
4. En problemas donde hay dos o más objetos, para simplificar las ecuacionesque se obtienen de aplicar la segunda ley de Newton, hay que hacer uso de latercera ley de Newton y de todas las ligaduras.
5. Despejar las incógnitas de las ecuaciones resultantes.
6. Comprobar si los resultados tienen las unidades correctas y parecen razona-bles.
Actividad 3.6:
¿Un sistema aislado puede estar compuesto por más de un cuerpo? Sila respuesta anterior es sí: ¿cuándo es conveniente definir un sistemaaislado formado por más de un cuerpo?
¿Qué criterio nos debe guiar para escoger el sistema de coordenadasde nuestro problema?
Mostramos a continuación algunos ejemplos en los que se hace uso de estastécnicas.
EJEMPLO 3.1 Colgando un cuadroUn cuadro de masa m se aguanta mediante dos cables que ejercen tensiones T1 y T2, talcomo se muestra en la figura. Determinar la tensión de los cables.
Como el cuadro está en reposo, la aceleración es nula y la fuerza neta que actúa sobreel mismo también debe serlo. Las tres fuerzas que actúan sobre el cuadro (su peso ~P , y lastensiones ~T1 y ~T2) deben dar una resultante nula. Es decir,
~P +~T1 +~T2 = 0
Planteamos el diagrama de fuerzas que muestra la figura. Descomponiendo la ecua-ción anterior en las componentes x e y tenemos{
Eje x → T1,x −T2,x = 0
Eje y → T1,y +T2,y −mg = 0
es decir, {Eje x → T1 cos30°−T2 cos60° = 0
Eje y → T1 sen30°+T2 sen60°−mg = 0
Si expresamos, a partir de la ecuación de la componente x, el valor de T2 en función de T1:
T2 = T1cos30°
cos60°= T1
p3
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.3. Resolución de problemas. Diagramas de fuerzas 73
e introducimos este valor en la ecuación para la componente y , nos queda
T1(sen30°+p3sen60°) = mg → T1
(1
2+ 3
2
)= mg
esto es, T1 = mg /2. Teniendo ahora en cuenta la relación entre T1 y T2 nos queda final-mente que
T2 = mgp
3
2
EJEMPLO 3.2 Peso en un ascensor
Un hombre de masa m está de pie sobre una balanza de muelles sujeta al suelo de unascensor. (a) ¿Qué peso indicará cuando el ascensor cuando se mueva con aceleración~ahacia arriba? (b) ¿Qué peso indicará cuando el ascensor cuando se mueva con acelera-ción~a′ hacia abajo?
La lectura de la balanza es el peso aparente del hombre, es decir, el módulo de la fuerzanormal ~N ejercida por la balanza sobre el hombre (ver figura). Como el hombre está enreposo respecto al ascensor, tanto el uno como el otro poseen la misma aceleración. Sobreel hombre actúan dos fuerzas: la fuerza de la gravedad hacia abajo, m~g , y la fuerza de lanormal de la balanza, ~N , hacia arriba. La suma de ambas es la causa de la aceleraciónobservada por el hombre. Elegiremos como positiva la dirección hacia arriba.
En el caso (a), la aceleración será ~a = a y, por lo que, aplicando la segunda ley de New-ton a las fuerzas en el eje y tenemos
N −mg = ma → N = m(g +a)
En el caso (b), ~a′ =−a y, y, en consecuencia,
N −mg =−ma′ → N = m(g −a′)
Cuando el hombre acelera hacia arriba, el peso aparente del hombre es mayor quemg , incrementándose una cantidad ma. Para el hombre todo ocurre como si la gravedadse incrementase de g a g + a. Cuando el ascensor acelera hacia abajo, el peso aparentedel hombre ha disminuido una cantidad ma′. El hombre se siente más ligero, como si lagravedad fuera g−a′. Si a′ = g , el ascensor estaría en caída libre y el hombre experimentaríala ingravidez (esto se podría hacer cortando la cuerda que sujeta al ascensor).
3.3.2. Problemas con dos o más cuerpos
Algunos problemas tratan de dos o más cuerpos que están en contacto o co-nectados a través de una cuerda o un muelle. Estos problemas se resuelven dibu-jando un diagrama de fuerzas para cada cuerpo y aplicando después la segundaley de Newton a cada uno de ellos. Las ecuaciones resultantes, juntos con otrasecuaciones que describen las restricciones establecidas, se resuelven simultánea-mente para las fuerzas o aceleraciones desconocidas. Si los cuerpos están en con-tacto directo, las fuerzas que se ejercen mutuamente deben ser iguales y opues-tas, como establece la tercera ley de Newton. Dos cuerpos que se mueven en línearecta y que estén conectados por una cuerda tensa deben tener la misma compo-nente de la aceleración paralela a la cuerda, ya que el movimiento en la direcciónparalela a la cuerda de ambos cuerpos es idéntico. Si la cuerda pasa por una pin-za o polea, la frase “paralela a la cuerda” significa paralela al segmento atada alobjeto.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
74 Tema 3. Dinámica de la partícula
Consideremos a los dos alpinistas mostrados en la figura, donde uno sostienea otro mediante una cuerda. La velocidad con la cual uno sube se iguala con lavelocidad con la que el otro baja; o equivalentemente las componentes del vectorvelocidad de cada uno paralelas al tramo de cuerda al que están sujetos debenigualarse. Lo mismo ocurre con las componentes de la aceleración paralelas a lacuerda.
Los segmentos de cuerda en contacto con los alpinistas experimentan unatensión, que, según la tercera ley de Newton, tendrá el mismo módulo y sentidocontrario que la tensión ejercida por la cuerda sobre los alpinistas. En principio, latensión que realizan el que sube (~T1) y el que baja (~T2) sobre un segmento de cuer-da de masa ∆m no tienen por qué ser la misma. Así, aplicando la segunda ley deNewton, T1 −T2 = (∆m)a. Si la masa del segmento de cuerda ∆m es despreciable,entonces T1 = T2 y no se necesita una fuerza neta para darle una aceleración (esdecir, solo se necesita una diferencia de tensión infinitesimal para dar a un trozode cuerda de masa despreciable una aceleración finita).
Calculemos la tensión y la aceleración de los alpinistas. Para ello planteamosun diagrama de sistema aislado para cada alpinista, teniendo en cuenta que lastensiones de la cuerda ~T1 y ~T2 son de igual módulo al ser la cuerda de masa des-preciable. La cuerda ni se alarga ni se encoge, de modo que ambos alpinistas siem-pre tienen el mismo módulo de la velocidad. Sus aceleraciones a1 y a2 son, por lotanto, iguales en módulo, pero no en dirección. El que sube acelera por la super-ficie de la montaña, mientras que el que baja lo hace verticalmente hacia abajo.Así, aplicando la segunda ley de Newton a las fuerzas aplicadas sobre el que subeen el eje x tenemos
T1 −P1,x = m1a1, P1,x = m1g senθ
y, aplicando la segunda ley de Newton para el otro montañero (en el eje x ′), tene-mos:
m2g −T2 = m2a2
Teniendo en cuenta las dos ligaduras del sistema, T1 = T2 ≡ T y a1 = a2 ≡ a,nos queda un sistema de ecuaciones con dos incógnitas, a saber, T y a:
{T −m1g senθ = m1a
m2g −T = m2a
A partir de aquí se puede despejar los valores de T y a:
T = m1m2g
m1 +m2(1+ senθ)
a = m2 −m1 senθ
m1 +m2g .
Actividad 3.7:
¿Qué caracterísitca importante hace que muchos sistemas de doscuerpos no puedan ser tratados como un sistema aislado? ¿Por qué esconveniente escoger varios sistemas de coordenadas en estos casos?
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.3. Resolución de problemas. Diagramas de fuerzas 75
3.3.3. Fuerzas de rozamiento
En la Sección 3.2 mostramos que las fuerzas de contacto poseen una compo-nente normal y otra paralela a la dirección de movimiento. Esta última compo-nente está relacionada con el rozamiento o fricción entre los cuerpos que se en-cuentran en contacto. En esta sección analizaremos cuantitativamente los efectosdel rozamiento en el movimiento de los cuerpos.
Mostramos a continuación la metodología que conviene aplicar para resolverproblemas que incluyen rozamiento:
1. Se escoge el eje y en la dirección normal a las superficies de contacto. Se eligeel eje x paralelo a la superficie y paralelo o antiparalelo a la fuerza de roza-miento.
2. Se aplica la segunda ley de Newton (3.2) a las componentes de la fuerza en eleje y y se obtiene la fuerza normal.
Si el rozamiento es dinámico, la fuerza de rozamiento se obtiene usandoFd =µd N .
Si el rozamiento es estático, se relaciona la fuerza de rozamiento máximacon la fuerza normal usando Fe,máx =µe N .
3. Se aplica la segunda ley de Newton (3.2) a las componentes de la fuerza en eleje x y se obtiene la variable deseada.
Actividad 3.8:
Explique por qué la fuerza de rozamiento no puede tener componentenormal.
Recuerde la diferencia fundamental que existe entre el rozamiento es-tático y el dinámico. ¿Cómo se manifiesta esta diferencia en las ecua-ciones dinámicas?
Veamos a continuación algunos ejemplos en los que existe rozamiento.
EJEMPLO 3.3 Una moneda que resbala
Por la cubierta superior de un libro de tapas duras que está sobre una mesa hay unamoneda. Poco a poco se levanta la tapa del libro hasta que la moneda comienza a des-lizar. El ángulo θmáx es el ángulo que forma la tapa con la horizontal en el momentoen que la moneda empieza a moverse. Calcular el coeficiente de rozamiento estático µeentre la tapa del libro y la moneda en función de θmáx.
Las fuerzas que actúan sobre la moneda son su peso, la fuerza normal ejercida por ellibro y la fuerza de rozamiento. Sigamos la metodología mencionada anteriormente pa-ra resolver problemas con rozamiento estático. Para ello, en primer lugar, dibujamos undiagrama de fuerzas cuando la tapa del libro está inclinada un ángulo θ ≤ θmáx.
Aplicamos la segunda ley de Newton para las componentes x e y de las fuerzas, tenien-do en cuenta que, como la moneda no desliza, la aceleración será cero:
{Eje x → N = mg cosθ
Eje y → Fe = mg senθ
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
76 Tema 3. Dinámica de la partícula
Como Fe ≤ µe N , tenemos que, aplicando la ecuación para el eje x, Fe ≤ µe mg cosθ.Aplicando este último resultado en la ecuación del eje y nos queda
mg senθ ≤µe mg cosθ
es decir,
µe ≥ tanθ
En consecuencia, la moneda no desliza cuando se cumple esta última condición (esdecir, cuando θ ≤ arctanµe ). Como la tangente es una función creciente en el primer cua-drante (lógicamente, en nuestro problema los ángulos tienen que ser inferiores a 90º), lamoneda comenzará a deslizar cuando θ llegue a su valor máximo:
µe = tanθmáx
EJEMPLO 3.4 Un bloque que resbala
La masa m2 de la figura se ha ajustado de forma que el bloque de masa m1 está en elumbral de deslizamiento. (a) Calcular el coeficiente de rozamiento estático en funciónde m1 y m2. (b) Con un ligero toque, los bloques se mueven con aceleración a. Deter-minar su valor teniendo en cuenta que el coeficiente de rozamiento dinámico entre elbloque y el soporte horizontal es µd .
Para resolver el problema, aplicamos la segunda ley de Newton a cada bloque por se-parado, teniendo en cuenta que la tensión de la cuerda y la aceleración es la misma paracada bloque. La figura muestra el diagrama de fuerzas.
La determinación de µe en el apartado (a) se hace suponiendo que la fuerza de roza-miento estático sobre m1 es igual a su valor máximo y que la aceleración es cero. Aplicandola segunda ley de Newton a cada bloque tenemos que
Eje x → Fe,máx = T
Eje y → N = m1g
Eje x′ → T = m2g
Como Fe,máx = µe N , tenemos, a partir de las ecuaciones para el bloque 1, que T =µe N =µe m1g . Introduciendo este valor en la ecuación para el bloque 2, nos quedaµe m1g =m2g . En consecuencia,
µe = m2
m1.
Para resolver el apartado (b) tenemos en cuenta que la aceleración es distinta de cero.Así, según la segunda ley de Newton:
Eje x → T −Fd = m1a
Eje y → N = m1g
Eje x′ → m2g −T = m2a
Como Fd = µd N , obtenemos T = µd N +m1a = m1(µd g +a). Sustituyendo este resul-tado en la ecuación para el bloque 2, nos queda:
a = m2 −µd m1
m1 +m2
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.4. Movimiento a lo largo de una trayectoria curva. Fuerzas centrípetas 77
3.4. Movimiento a lo largo de una trayectoria curva.Fuerzas centrípetas
En el Tema 2 se estableció que si una partícula se mueve con una velocidad va lo largo de una trayectoria curva con un radio de curvatura r , la partícula tieneuna componente de la aceleración an = v2/r en la dirección normal o centrípeta(hacia el centro de curvatura), y una componente de la aceleración en la direccióntangencial (aτ = dv/dt ).
Además, según la segunda ley de Newton, la fuerza neta va en la dirección dela aceleración. La componente de la fuerza neta en la dirección normal se deno-mina fuerza centrípeta. La fuerza centrípeta no es una clase de fuerza distinta delas que ya hemos estudiado, sino que meramente designa a la componente de lafuerza neta perpendicular a la dirección de movimiento. Esta fuerza puede ejer-cerse mediante una cuerda, un muelle o cualquier otra fuerza de contacto comola fuerza normal o la fuerza de rozamiento. También puede producirse median-te una fuerza de acción a distancia como la fuerza de gravitación, o puede darsecomo resultado de una combinación de todas. En cualquier caso, siempre apuntahacia el centro de curvatura de la trayectoria.
Actividad 3.9:
¿Existe alguna diferencia conceptual entre una fuerza centrípeta ycualquier otro tipo de fuerza (por ejemplo, la gravitatoria)?
¿Existe algún tipo de problemas en los que no puede haber fuerzascentrípetas? Descríbalos.
¿Existe algún tipo de problemas en los que solo puede haber fuerzascentrípetas? Descríbalos.
Veamos algunos ejemplos en los que aparecen estos tipos de fuerza.
EJEMPLO 3.5 Dando vueltas a un cubo
Se hace girar un cubo de agua siguiendo una circunferencia vertical de radio r . Si la ve-locidad del cubo en su parte más alta es va , calcular (a) la fuerza ejercida por el cubosobre el agua, Fp , en este punto; (b) el valor mínimo de va para que el agua no se salgadel cubo; (c) la fuerza ejercida por el cubo sobre el agua en la parte más baja del círculo,en donde la velocidad del cubo es vb .
Aplicamos la segunda ley de Newton para calcular la fuerza ejercida por el cubo sobreel agua. Como el agua se mueve según una trayectoria circular, existirá una aceleracióncentrípeta v2/r hacia el centro del círculo. Dibujamos un diagrama de fuerzas para el aguaen la parte superior y en la parte inferior de la circunferencia. En cada caso, elegimos comosentido positivo del eje y la dirección hacia el centro de la circunferencia.
Para resolver el apartado (a), aplicamos la segunda ley de Newton en el punto más alto,teniendo en cuenta que la velocidad es va y la aceleración será v2
a /r :
Fp +mg = mv2
a
r→ Fp = m
(v2
a
r− g
)
La fuerza mínima que puede realizar el cubo sobre el agua es cero, correspondiendoeste caso a una pérdida de contacto entre el cubo y el agua. Como
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
78 Tema 3. Dinámica de la partícula
va =√
r
(Fp
m+ g
)el valor mínimo de va corresponderá al valor mínimo de la fuerza, que es cero, tenemos:
va,mín =pr g
Aplicamos finalmente la segunda ley de Newton para determinar el valor de la fuerzade contacto en el punto más bajo:
Fp = m
(v2
b
r+ g
)
En la parte más baja del círculo, la fuerza de contacto debe ser mayor que el peso demodo que se suministre la fuerza centrípeta necesaria para que el cubo comience a girar.
EJEMPLO 3.6 El péndulo cónico
Una bola de masa m está suspendida de una cuerda de longitud L y se mueve con ve-locidad constante v siguiendo una circunferencia horizontal de radio r . La cuerda formaun ángulo constante θ con la vertical. Determinar la tensión de la cuerda y la velocidadde la bola.
Sobre la bola actúan dos fuerzas: su peso y la tensión T de la cuerda. La suma vectorialde estas fuerzas va en la dirección de la aceleración. Como la bola se mueve en una cir-cunferencia horizontal de radio constante, la aceleración será centrípeta, es decir, dirigidahacia el centro de la circunferencia.
Para calcular la tensión de la cuerda y la velocidad de la bola planteamos un diagramade fuerzas, colocando el eje x solidario con el radio de la circunferencia. Así, aplicandola segunda ley de Newton y, teniendo en cuenta que la aceleración (centrípeta) apunta alsentido positivo del eje x: Eje x → T senθ = m
v2
r
Eje y → T cosθ−mg = 0
De la ecuación para el eje y podemos despejar el siguiente valor de T :
T = mg
cosθ
Introduciendo este valor en la ecuación para el eje x, se obtiene la velocidad v :
v =√
r g tanθ
3.5. Ley de Hooke. Movimiento armónico simple
Estamos familiarizados con varios ejemplos de movimiento periódico, talescomo las oscilaciones de un objeto conectado a un muelle, el movimiento de unpéndulo o las vibraciones de un instrumento musical de cuerda. Existen muchosotros sistemas que muestran un comportamiento periódico; por ejemplo, las mo-léculas de un sólido vibran alrededor de sus posiciones de equilibrio; las ondas
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.5. Ley de Hooke. Movimiento armónico simple 79
electromagnéticas se caracterizan por tener vectores de campo eléctrico y mag-nético oscilantes; en los circuitos de corriente alterna, el voltaje y la corriente va-rían periódicamente en el tiempo. En esta sección analizaremos algunos sistemasmecánicos que muestran un movimiento periódico.
Cuando la fuerza que actúa sobre una partícula es proporcional al desplaza-miento de la partícula respecto a una posición de equilibrio y esa fuerza está diri-gida siempre hacia dicha posición de equilibrio, decimos que esta fuerza sigue laley de Hooke. En el caso monodimensional, esta fuerza da lugar a un tipo especialde movimiento periódico denominado movimiento armónico simple, que ya fueanalizado de forma simple en el Apartado 2.5.1 y que nos servirá como modelo deanálisis de una gran cantidad de problemas relacionados con las oscilaciones.
3.5.1. Partícula unida a un muelle
Para estudiar el movimiento oscilatorio, un modelo muy útil es el formadopor un objeto de masa m conectado a un muelle horizontal situado sobre unasuperficie sin rozamiento, tal como muestra la figura. Si el muelle no está estiradoni contraído, el objeto está en reposo en su posición de equilibrio, la cual quedadefinida por x = 0 (figura b). Si se mueve el objeto hacia un lado, hasta la posiciónx (figura a), y luego se suelta, oscilará hacia adelante y hacia atrás. Cuando unapartícula unida a un muelle ideal sin masa se desplaza hasta una posición x, elmuelle ejerce una fuerza cuya magnitud, según la ley de Hooke, viene dada por
Fx =−kx (3.7)
donde k es la constante de recuperación del muelle y Fx es la componente se-Ley de Hookegún el eje x de la fuerza ~F ejercida por el muelle. Decimos que la fuerza de la
ecuación (3.7) es una fuerza de recuperación lineal, ya que es proporcional al des-plazamiento respecto a la posición de equilibrio, y va dirigida siempre hacia laposición de equilibrio, en sentido opuesto al desplazamiento. Es decir, cuando lapartícula se desplaza hacia la derecha, como en la figura (a), x es positivo y lafuerza ejercida por el muelle tiene una componente negativa, hacia la izquierda.Cuando la partícula de desplaza hacia la izquierda de x = 0 (figura c), x es ne-gativo y la fuerza ejercida por el muelle tiene una componente positiva, hacia laderecha. Cuando una partícula está bajo el efecto de una fuerza de recuperaciónlineal, el movimiento de la partícula se corresponde con un tipo especial de movi-miento oscilatorio denominado movimiento armónico simple (MAS). Se puedecomprobar si una partícula tendrá un movimiento armónico simple analizandosi la fuerza que se ejerce sobre la partícula es lineal con respecto a x. Al sistemaque experimenta un MAS se le denomina oscilador armónico.
Imaginemos una partícula sometida a una fuerza de recuperación lineal, si-milar a la indicada en la ecuación (3.7). Aplicando a la partícula la segunda ley deNewton en la dirección x tenemos
Fx = ma → −kx = ma
Podemos despejar la aceleración, quedando
a =− k
mx . (3.8)
Es decir, la aceleración es proporcional al desplazamiento de la partícula conrelación a la posición de equilibrio y va dirigida en sentido opuesto al desplaza-miento. Si desplazamos la partícula hasta una posición x = A y luego, cuando la
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
80 Tema 3. Dinámica de la partícula
partícula está parada, la soltamos, su aceleración inicial es −k A/m. Cuando lapartícula pasa por la posición de equilibrio, x = 0, su aceleración es cero. En eseinstante, su velocidad alcanza un valor máximo, ya que la aceleración cambia designo. La partícula continúa moviéndose hacia la izquierda de la posición de equi-librio con una aceleración positiva y, finalmente, alcanza la posición x = −A. Enese instante, su aceleración es +k A/m y su velocidad es, de nuevo, cero. La partí-cula realiza un ciclo completo de movimiento volviendo a la posición original, pa-sando de nuevo por x = 0 a la velocidad máxima. Por tanto, vemos que la partículaoscila entre los puntos límite x =±A. En ausencia de rozamiento, este movimien-to continuará indefinidamente. Los sistemas reales, están sujetos, generalmente,a algún tipo de rozamiento y por ello no pueden oscilar indefinidamente.
Representación matemática del movimiento armónico simple
Vamos a desarrollar a continuación una representación matemática del mo-vimiento que hemos descrito anteriormente. Recordemos que, por definición,a(t ) = v(t ) = x(t ), por lo que podemos expresar la ecuación (3.8) de la forma
x =− k
mx .
Identificando
ω20 =
k
m(3.9)
la expresión anterior se transforma en
x =−ω20x . (3.10)
Necesitamos ahora una solución matemática para esta ecuación. Es decir, unafunción x(t ) que satisfaga esta ecuación diferencial de segundo orden. Esto nosdará una representación matemática de la posición de la partícula en función deltiempo. Buscamos, por tanto, una función x(t ) tal que su derivada segunda seaigual a la función original, pero con signo negativo y multiplicada porω2
0. Las fun-ciones trigonométricas seno y coseno muestran este comportamiento, de modoque podemos construir una solución basándonos en una cualquiera de ellas. Lasiguiente función coseno es una solución a la ecuación diferencial (3.10):
x(t ) = A cos(ω0t +ϕ) (3.11)
donde A, ω0 y ϕ son constantes. Para ver esto de forma explícita, obsérvese que
Ecuación del MAS
v(t ) = x(t ) =−ω0 A sen(ω0t +ϕ) (3.12)
a(t ) = x(t ) =−ω20 A cos(ω0t +ϕ) . (3.13)
Si comparamos las ecuaciones (3.11) y (3.13), vemos que x =−ω20x, lo que satisfa-
ce la ecuación (3.10).
Los parámetros A, ω0 y ϕ son constantes del movimiento. Para dar un signifi-cado físico a estas constantes es conveniente disponer de una forma de represen-tación gráfica del movimiento, dibujando la curva que representa x en funciónde t , como se muestra en la figura. En primer lugar, vemos que el parámetro A,denominado amplitud del movimiento, es, sencillamente, el valor máximo de laposición de la partícula tanto en el sentido positivo como en el negativo del eje x.La constante ω0 se denomina frecuencia angular y se mide en rad/s.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.5. Ley de Hooke. Movimiento armónico simple 81
Partiendo de la ecuación (3.9), obtenemos que la frecuencia angular es
ω0 =√
k
m. (3.14) Relación entre la frecuencia angular y
la constante de un muelle
El ángulo ϕ se llama constante de fase (también llamada ángulo de fase o faseinicial) y, al igual que la amplitud A, queda determinado solamente por la posi-ción y la velocidad de la partícula en el instante t = 0. Si la partícula está en suposición máxima x = A en el instante t = 0, la constante de fase esϕ= 0 y la repre-sentación gráfica del movimiento es la que se muestra en la figura. A la magnitud(ω0t +ϕ) se le denomina fase del movimiento. Obsérvese que la función x(t ) esperiódica y que su valor es el mismo cada vez que ωt se incrementa en 2π radia-nes.
El periodo T del movimiento se define como el tiempo que necesita la partí-cula para describir un ciclo completo de su movimiento. Es decir, los valores dex y v para la partícula en el instante t son iguales que los valores de x y v en elinstante t +T . Podemos establecer la relación que existe entre el periodo y la fre-cuencia angular gracias al hecho de que la fase se incrementa en 2π radianes enun tiempo T :
[ω0(t +T )+ϕ]− [ω0t +ϕ] = 2π .
Simplificando la expresión anterior obtenemos que ω0T = 2π, o bien
T = 2π
ω0. (3.15) Periodo del MAS
Al inverso del periodo se le denomina frecuencia f del movimiento. Mientrasque el periodo es el intervalo de tiempo que dura cada oscilación, la frecuenciarepresenta el número de oscilaciones que lleva a cabo la partícula por unidad detiempo:
f = 1
T= ω0
2π.
Las unidades en las que se mide f son ciclos por segundo o hercios (Hz). Adap-tando esta ecuación tenemos
ω0 = 2π f = 2π
T.
Podemos combinar la ecuaciones (3.14) y (3.15) para expresar el periodo delmovimiento del sistema muelle-partícula en función de las constantes k y m delsistema, de la forma
T = 2π
√m
k(3.16)
es decir, el periodo (y, por consiguiente, la frecuencia) de un oscilador armóni-co depende solamente de la masa de la partícula y de la constante de recupera-ción del muelle y no de los parámetros del movimiento, como A o ϕ. Como cabíaesperar, la frecuencia es mayor para un muelle más rígido (mayor valor de k) ydisminuye al aumentar la masa de la partícula.
Obtuvimos la aceleración y la velocidad de una partícula que experimenta unmovimiento armónico simple en las ecuaciones (3.12) y (3.13). De la ecuación(3.12) deducimos que, como las funciones seno y coseno oscilan entre ±1, los va-lores límites de v son ±ω0 A. Del mismo modo, la ecuación (3.13) nos dice que los
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
82 Tema 3. Dinámica de la partícula
valores límite de la aceleración son ±ω20 A. Por lo tanto, los valores máximos del
módulo de la aceleración la velocidad son, respectivamente,
vmáx =ω0 A; amáx =ω20 A .
La figura (a) representa la posición en función del tiempo para un valor arbi-trario de la constante de fase. Las curvas velocidad-tiempo y aceleración-tiempoasociadas están representadas en las figuras (b) y (c). Estas figuras muestran quela fase de la velocidad difiere de la fase de la posición en π/2 radianes. Es decir,cuando la posición x es máxima o mínima, la velocidad es cero. Del mismo mo-do, cuando x es cero, la velocidad alcanza su máximo. Obsérvese, además, quela fase de la aceleración difiere de la fase de la posición en π radianes. Por ejem-plo, cuando x está en un máximo, a alcanza su módulo máximo, pero en sentidoopuesto.
Actividad 3.10:
¿Cuál es la diferencia más relevante entre un movimiento de traslacióny uno de oscilación?
Dé algunas razones por las que el movimiento oscilatorio es tan im-portante en nuestra vida y en nuestra tecnología.
Describa las razones físicas que hacen que un objeto unido a un mue-lle experimente un movimiento oscilatorio. ¿Cuál es la clave?
¿Depende el periodo de la oscilación de la amplitud de la propia osci-lación?
Explique razonadamente por qué el periodo de un muelle fuerte serámenor que el de un muelle más flojo.
3.5.2. El péndulo simple
El péndulo simple es otro sistema mecánico que exhibe un movimiento pe-riódico. Consiste en un objeto puntual de masa m, suspendido de una cuerda (obarra) ligera de longitud L, cuyo extremo superior está fijo, tal como muestra lafigura adyacente. En el caso de un objeto real, siempre que el tamaño del objetosea pequeño comparado con la longitud de la cuerda, el péndulo puede modelar-se como un péndulo simple; se trata de un modelo de partícula. Cuando el objetose desplaza hacia un lado y luego se suelta, oscila alrededor del punto más bajo,que es la posición de equilibrio. El movimiento se produce en un plano vertical yestá impulsado por la fuerza de la gravedad.
Las fuerzas que actúan sobre el objeto son la tensión ~T ejercida por la cuer-da y la fuerza de la gravedad, m~g . La componente tangencial de la fuerza de lagravedad, mg senφ, siempre actúa hacia la posición dada por φ = 0, en sentidoopuesto al desplazamiento. La fuerza tangencial es, por tanto, una fuerza de recu-peración y podemos utilizar la segunda la ley de Newton para escribir la ecuacióndel movimiento en la dirección tangencial como
Fτ = maτ ⇒ −mg senφ= mdv
dt= m
d2s
dt 2
donde s es la posición medida a lo largo del arco circular de la figura y el signonegativo indica que Fτ actúa hacia la posición de equilibrio y se ha usado la iden-
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.5. Ley de Hooke. Movimiento armónico simple 83
tidad (2.12). Dado que s = Lφ y L es constante, está ecuación se puede reescribircomo
d2φ
dt 2 =− g
Lsenφ (3.17)
Esta ecuación es similar a (3.10), aunque no idéntica. El miembro derecho esproporcional a senφ en lugar de φ; por lo tanto, podemos extraer la conclusiónde que el movimiento no es armónico simple, ya que la ecuación que describe es-te movimiento no tiene la forma de la ecuación (3.10). Sin embargo, si asumimosque φ es pequeño (menor que unos 10o), podemos usar un modelo simplificadodenominado aproximación para ángulos pequeños, donde senφ≈φ, estando φexpresado en radianes. Por tanto, para ángulos pequeños, la ecuación de movi-miento pasa a ser
d2φ
dt 2 =− g
Lφ (3.18)
Ecuación de movimiento para el pén-dulo simple (con φ pequeño)
Ahora sí tenemos una expresión que tiene exactamente la misma forma ma-temática de la ecuación (3.10), con ω2
0 = g /L, de modo que podemos extraer laconclusión de que el movimiento es aproximadamente armónico simple para pe-queñas amplitudes. Considerando la solución a partir de la ecuación (3.11), φ sepuede escribir por tanto comoφ(t ) =φmax cos(ω0t +ϕ), dondeφmax es la posiciónangular máxima y la frecuencia angular ω0 es
ω0 =√
g
L(3.19)
y el periodo del movimiento viene dado por
Frecuencia angular de unpéndulo simple
T = 2π
√L
g. (3.20)
En otras palabras, el periodo y la frecuencia de un péndulo simple que os-cila con ángulos pequeños depende solamente de la longitud de la cuerda y dela aceleración de la gravedad. Dado que el periodo es independiente de la masa,podemos deducir que todos los péndulos simples de igual longitud situados enla misma ubicación, oscilarán con periodos iguales. La experimentación muestraque esta deducción es correcta. El péndulo simple se puede utilizar para medir eltiempo. También es muy adecuado para hacer mediciones precisas de los valoresde la aceleración de la gravedad.
Actividad 3.11:
¿Quién proporciona la fuerza recuperadora en un péndulo?
¿Por qué se opta por resolver la ecuación (3.18) en vez de la ecuaciónmás general (3.17)?
Si estuviese en la Luna y dispusiese de un péndulo y un cronómetro,¿cómo podría calcular el valor de su gravedad?
Si las oscilaciones de un péndulo son muy amplias, ¿puede caracteri-zarse su movimiento como un MAS? ¿Por qué?
¿Por qué se paran los péndulos? ¿Qué podría hacer para que un pén-dulo siguiese en movimiento perpetuo?
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
84 Tema 3. Dinámica de la partícula
3.6. Trabajo y energía
3.6.1. Trabajo de una fuerza a lo largo de una trayectoria
Consideremos una partícula que se mueve desde un punto 1 hasta otro puntovecino 2 (ver figura). Al vector d~r que une dos puntos infinitesimalmente pró-ximos de la trayectoria se le denomina vector desplazamiento diferencial de lapartícula. Supongamos que sobre esa partícula está actuando una fuerza ~F . Sedefine el diferencial de trabajo de ~F correspondiente al desplazamiento d~r como
Trabajo infinitesimal
dW = ~F ·d~r . (3.21)
Por consiguiente el trabajo que realiza la fuerza ~F al desplazar a una partículadesde un punto 1 hasta otro punto 2 podrá expresarse como la siguiente integralde camino [ver Sec. 1.9.2]:
W1→2 =∫ 2
1
~F ·d~r . (3.22)Definición de Trabajo
El trabajo es, por tanto, una magnitud escalar cuya unidad en el Sistema Inter-nacional es N·m, también llamada julio (J). Aplicando la definición de productoescalar tendremos
Unidad de Trabajo: 1 J (julio)
dW = F dr cosϕ (3.23)
con lo que dW ≥ 0 si 0 ≤ϕ≤π/2, mientras que dW ≤ 0 siπ/2 ≤ϕ≤π. ObviamentedW = 0 si ϕ = π/2 (fuerza y desplazamiento perpendiculares). En consecuencia,la fuerza normal de contacto de una superficie no realiza trabajo sobre un cuerpoque deslice sobre ella, ya que ~F y d~r son perpendiculares. Utilizando la descom-posición vectorial en componentes podremos también escribir el diferencial detrabajo como
dW = Fx dx +Fy dy +Fz dz
y el trabajo para un desplazamiento desde el punto (x1, y1, z1) al punto (x2, y2, z2)como
W1→2 =∫ 2
1
~F ·d~r =∫ x2
x1
Fx dx +∫ y2
y1
Fy dy +∫ z2
z1
Fz dz . (3.24)
Veamos, a modo de ejemplo, el trabajo realizado por la fuerza de la gravedadsobre un objeto que se mueva sobre la superficie terrestre. Tomando el eje y enla dirección vertical y el sentido positivo del eje y hacia arriba, tenemos para lafuerza, ~F =−mg y (o, equivalentemente, Fx = Fz = 0 y Fy =−mg ) y, por tanto,
W =−∫ y2
y1
mg dy = mg (y1 − y2) . (3.25)
Apuntes de Física 1 JCM,FLML
CopiaUso
Académico
3.6. Trabajo y energía 85
Actividad 3.12:
¿Tiene el trabajo dirección y sentido? Si su respuesta es NO, entonces¿tienen relevancia los conceptos de dirección y sentido en el cálculodel trabajo?
Razone si son verdaderas o falsas las siguientes afirmaciones referen-tes al trabajo hecho por una fuerza para desplazar una partícula desdeun punto A hasta otro B .
• En general, el trabajo no depende de la trayectoria seguida desdeA hasta B .
• Si B ≡ A de modo que la trayectoria es cerrada, el trabajo es siem-pre nulo.
• Si la fuerza es una fuerza de contacto normal, el trabajo realizadoes nulo independietemente de la trayectoria seguida.
¿Puede el trabajo W realizado por una fuerza~F para desplazar una par-tícula una distancia d definirse, en general, como W = F d? Razone surespuesta.
3.6.2. Potencia
Cuando se trata con máquinas o motores, es a menudo más conveniente ma-nejar el concepto de potencia en lugar del de trabajo. La potencia es el trabajorealizado por unidad de tiempo. Tanto un motor pequeño como una gran cen-tral eléctrica pueden realizar la misma cantidad de trabajo. La diferencia estribaen que, mientras que el motor pequeño puede tardar un año, la central eléctricapuede requerir solo unos minutos.
Si W es el trabajo realizado en un tiempo ∆t , la potencia media desarrolladaen ese intervalo será
⟨P⟩ = W
∆t.
En el límite en que ∆t → 0, tendremos la potencia instantánea:2
Potencia media
P (t ) = dW
dt. (3.26) Potencia instantánea
La potencia puede expresarse también en función de la fuerza aplicada ~F . Pa-ra ello notemos que dW = ~F ·d~r , y si escribimos d~r en función de su velocidadtenemos que
dW = ~F ·~v dt . (3.27)
2 A partir de la definición de potencia instantánea podemos obtener la potencia media si notamosque esta última se define como
⟨P⟩ = 1
∆t
∫ ∆t
0P (t )dt
= 1
∆t
∫ ∆t
0
(dW
dt
)dt = 1
∆t
∫ ∆t
0dW = W
∆t.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
86 Tema 3. Dinámica de la partícula
Como a su vez, podemos escribir el diferencial de trabajo como
dW =(
dW
dt
)dt = P (t )dt (3.28)
al identificar las dos últimas expresiones encontramos que
P = ~F ·~v . (3.29)Potencia en función de ~F y ~v
La unidad de potencia en el Sistema Internacional es el J/s o vatio (W). Gene-ralmente es una unidad muy pequeña, por lo que se suelen utilizar múltiplos deUnidad de Potencia: 1W (vatio)la misma, como el kW o el MW. También se usa otra unidad no perteneciente alSistema Internacional, denominada caballo de vapor: CV (también se suele abre-viar con las letras “hp” correspondientes a la denominación inglesa horsepower,equivalente a 736 W). A veces se usa una unidad de trabajo diferente a partir dela unidad de potencia. Esta unidad es el kilovatio-hora (kWh), que se define comoel trabajo realizado durante una hora por un dispositivo cuya potencia es 1 kW. Elvalor numérico de 1 kWh es
1kWh = (103 W)× (3600 s) = 3,60×106 J .
Debe tenerse en cuenta que un kilovatio-hora es una unidad de trabajo, no depotencia. Las compañías eléctricas facturan normalmente según el trabajo reali-zado por los aparatos eléctricos usando como unidad el kWh.
Actividad 3.13:
Describa alguna razón por la que es conveniente introducir el concep-to de potencia.
¿Qué diferencia cualitativa existe entre potencia media y potencia ins-tantánea? ¿Qué concepto es más útil?
Si decimos que un motor es más potente (“tiene más potencia”) queotro, esto quiere decir que es capaz de realizar más trabajo. ¿Verdaderoo Falso? Razone la respuesta.
3.6.3. Energía cinética
Si partimos de la definición de diferencial de trabajo dada en (3.21) y de la pro-pia definición de fuerza dada por la segunda ley de Newton (~F = m~a), podremosescribir que
dW = ~F ·d~r = md~v
dt·d~r . (3.30)
Teniendo ahora en cuenta que el diferencial de desplazamiento puede expresarsecomo d~r =~v dt , tenemos que el producto escalar anterior puede a su vez reescri-birse como
d~v
dt·d~r = d~v
dt·~v dt =~v · d~v
dtdt =~v ·d~v
tras reconocer que d~v = (d~v/dt )dt [recordemos (1.107)]. Si notamos ahora que
~v ·d~v = 1
2d(~v ·~v) = d
(1
2~v ·~v
)= d
(1
2|~v |2
),
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.6. Trabajo y energía 87
el segundo miembro de (3.30) puede reescribirse como
md~v
dt·d~r = m d
(1
2|~v |2
)= d
(1
2mv2
)(3.31)
y, por tanto, obtenemos que
dW = ~F ·d~r = d
(1
2mv2
). (3.32)
Integrando la expresión anterior desde un punto de partida 1 donde v = v1, hastaun punto final 2 donde v = v2, resulta
W1→2 =∫ v2
v1
d
(1
2mv2
)= 1
2mv2
2 −1
2mv2
1 (3.33)
donde la magnitud escalar
Ec ≡ 1
2mv2 (3.34)
recibe el nombre de energía cinética.
Definición de Energía Cinética
La ecuación anterior se conoce con el nombre de teorema trabajo-energíacinética (o teorema de las fuerzas vivas). Dicho teorema expresa que
el trabajo realizado por una fuerza sobre una partícula es igual a lavariación de la energía cinética de la partícula:
W1→2 = Ec2 −Ec1 =∆Ec . (3.35) Teorema trabajo-energía cinética
Debido al principio de superposición, si sobre una partícula actúan variasfuerzas, ∆Ec representaría el trabajo total de todas ellas, que se calcularía comola suma algebraica del trabajo realizado por cada una de ellas. De cara a la reso-lución de problemas, el teorema trabajo-energía cinética presenta la gran ventajade que, para calcular velocidades, no se requiere determinar previamente las ace-leraciones a lo largo de la trayectoria. Además, solo intervienen magnitudes esca-lares y podemos prescindir de todas aquellas fuerzas que no realizan trabajo (porejemplo, las fuerzas normales) en la resolución de algunos problemas.
Actividad 3.14:
¿Hemos hecho alguna suposición o aproximación en la derivación delteorema trabajo-energía cinética?
El teorema trabajo-energía cinética no puede aplicarse a las fuerzas derozamiento. ¿Verdadero o Falso? Razone la respuesta.
Si mantenemos unas pesas de 80 kg quietas encima de nuestra cabe-za durante un minuto ¿estamos realizando algún trabajo? Explique surespuesta.
Si una partícula parte del reposo en A y llega a un punto B tambiénen reposo bajo la acción de cierta fuerza, ¿es el trabajo realizado poresta fuerza nula? Si su respuesta es afirmativa, ¿quiere esto decir que silevantamos un objeto pesado desde el suelo hasta cierta altura por en-cima de nuestra cabeza, no hemos realizado nosotros ningún trabajo?Razone su respuesta.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
88 Tema 3. Dinámica de la partícula
3.6.4. Fuerzas conservativas. Energía potencial
Una fuerza ~F se dice que es conservativa cuando el trabajo W1→2 querealiza sobre la partícula al desplazarla desde el punto 1 al punto 2 esindependiente de la trayectoria seguida;
esto es, si se verifica que
W1→2 =∫ 2
1,M
~F ·d~r =∫ 2
1,N
~F ·d~r (3.36)
donde M y N representan dos trayectorias distintas que unen los puntos 1 y 2 (verfigura adjunta). En la Sec. 1.9.3 se discute que esta propiedad solo se satisface si lafuerza ~F deriva de un potencial, es decir si podemos expresar ~F como el gradientede cierta función que llamaremos, por conveniencia, −Ep (~r ):
~F =−~∇Ep (3.37)
=−(∂Ep
∂xx+ ∂Ep
∂yy+ ∂Ep
∂zz)
. (3.38)
Bajo la anterior suposición, y siguiendo el teorema fundamental del cálculo dis-cutido en (1.143), encontramos que el trabajo puede expresarse en este caso como
W1→2 =∫ 2
1
~F ·d~r =−∫ 2
1
~∇Ep ·d~r =−∫ 2
1dEp
=− [Ep (~r2)−Ep (~r1)
](3.39)
esto es, si ~F es una fuerza conservativa podremos escribir entonces que
W1→2 = Ep (~r1)−Ep (~r2) =−∆Ep . (3.40)
La función Ep (~r ) se denomina energía potencial. Obsérvese que si W1→2 es
Trabajo de una fuerza conservativa
positivo (la fuerza realiza un trabajo), entonces∆Ep es negativo (la energía poten-cial disminuye). Podemos ver también que la energía potencial es una medida deltrabajo que puede realizar una determinada fuerza conservativa sobre un cuerpo.
Si la trayectoria que describe una partícula es una trayectoria cerrada, enton-ces el punto inicial coincide con el punto de llegada, es decir, Ep (~r1) = Ep (~r2),y, por tanto, el trabajo neto total es cero. Así pues, para una fuerza conservativasiempre tendremos que ∮
~F ·d~r = 0 (3.41)
en correspondencia con (1.145), donde∮
significa integral sobre una trayectoria
Definición de fuerza conservativa
cerrada.
Como ejemplo, analicemos el caso de la fuerza gravitatoria, que viene dadapor ~Fg = −mg y. En este caso, ya vimos en la Eq. (3.25) que el trabajo, Wg , querealiza dicha fuerza gravitatoria para mover una partícula de masa m entre dospuntos de altura y1 e y2 era
Wg = mg (y1 − y2) . (3.42)
Dado que el trabajo en una trayectoria cerrada [y1 ≡ y2] sería nulo, podemos afir-mar que la fuerza de la gravedad es una fuerza conservativa. A partir de la expre-sión anterior para Wg , y teniendo en cuenta (3.40) [esto es, Wg = Ep (1)−Ep (2)],podemos igualmente concluir que la energía potencial gravitatoria viene dada por
Ep (y) = mg y +C (3.43)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.6. Trabajo y energía 89
donde C es una constante indeterminada que siempre aparece en la determina-ción de la energía potencial. Esta indeterminación se resuelve tomando un nivelde referencia adecuado. En el caso de la energía potencial gravitatoria, se sueletomar como nivel de referencia la superficie terrestre, aunque se puede ajustarsegún cada problema concreto.
Actividad 3.15:
¿Hemos hecho alguna suposición o aproximación en la derivación dela expresión (3.40)?
La expresión (3.40) no puede aplicarse a las fuerzas de rozamiento.¿Verdadero o Falso? Razone la respuesta.
Demuestre si la fuerza recuperadora de un muelle dada por (3.7) esconservativa o no.
En el caso de alguno de nosotros levante un objeto pesado desde elsuelo hasta mantenerlo quieto con los brazos extendidos por encimade la cabeza, el teorema trabajo-energía cinética nos dice que la fuerzaque actúa sobre el objeto pesado no ha realizado trabajo en este pro-ceso. Explique esta aparente paradoja y demuestre que el trabajo querealizaríamos nosotros en este proceso es justamente la variación dela energía potencial del objeto pesado.
3.6.5. Energía mecánica. Conservación
Cuando tratamos con fuerzas conservativas, el teorema trabajo-energía ciné-tica puede combinarse con la ecuación (3.40) con lo que resulta:
∆Ec =−∆Ep
o, lo que es lo mismo,
∆(Ec +Ep ) = 0 . (3.44)
La cantidad
Em = Ec +Ep (3.45)
se conoce como energía mecánica total de la partícula, y la ecuación (3.44) indica
Energía mecánica
que
la energía mecánica total permanece constante bajo la acciónde fuerzas conservativas.
Volviendo al caso del campo gravitatorio, tenemos que
Em = 1
2mv2 +mg y = cte .
Si inicialmente la partícula se encuentra en reposo a una altura y0, a una altura ytendremos que
1
2mv2 +mg y = mg y0
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
90 Tema 3. Dinámica de la partícula
lo que nos permite escribir
v2 = 2g (y0 − y) = 2g h ,
fórmula bien conocida para la velocidad de caída libre de un cuerpo. Obsérveseque, como la energía potencial depende solo de la altura, la velocidad de una par-tícula tiene el mismo valor en todos los puntos situados en el mismo nivel parauna trayectoria dada (siempre que no haya rozamiento).
Así pues, bajo la acción de fuerzas conservativas, las energías cinética y poten-cial pueden variar pero su suma tiene que permanecer constante. La existencia
Las fuerzas de rozamiento no sonconservativas
de fuerzas no conservativas hace que la energía mecánica total no permanezcaconstante. Las fuerzas de rozamiento, por ejemplo, son fuerzas no conservativasy, por tanto, el trabajo que realizan no puede ser expresado como un cambio enla energía potencial, ya que depende de la trayectoria seguida por sus puntos deaplicación. Además, el trabajo de una fuerza de rozamiento es siempre negativo,lo cual produce una disminución de la energía mecánica.
Demostremos a continuación esta última afirmación (es decir, que el roza-miento disminuye la energía mecánica). Para ello dividimos la fuerza neta queactúa sobre una partícula en dos componentes, una debida a la resultante de lasfuerzas conservativas y otra debida a la resultante de las fuerzas no conservativas:~F = ~Fc +~Fnc . Así, podemos expresar
W =Wc +Wnc =−∆Ep +Wnc . (3.46)
Utilizando ahora el teorema trabajo-energía cinética (W =∆Ec ), llegamos a que
Trabajo de las fuerzas noconservativas es igual a la variación
de la energia mecánica
∆Ec =Wnc −∆Ep
de donde podemos extraer la siguiente importante conclusión:
Wnc =∆Ec +∆Ep =∆Em (3.47)
que nos dice que el trabajo de las fuerzas no conservativas es igual a la variaciónde la energía mecánica del sistema.
En el caso de que exista rozamiento entre el suelo y un objeto, la fuerza derozamiento ~Fr se opondrá al desplazamiento del objeto, por lo que dWnc = ~Fr ·d~r =−Fr dr en todo punto del espacio, y, en consecuencia, Wnc < 0. Por lo tanto,
∆Em < 0 .
El hecho de que la energía mecánica no se conserve cuando intervienen fuer-zas no conservativas no significa que se pierda o desaparezca energía del sistema,sino que se transforma en otro tipo de energía, tal como energía térmica (calor).Solo si se consideran todas las formas de energía que intervienen en el problema,el “principio de conservación de la energía” será válido. Este hecho no será tratadoaquí pues traspasaríamos las fronteras de la mecánica para entrar en el territoriode la termodinámica.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.6. Trabajo y energía 91
Actividad 3.16:
El principio de conservación de la energía mecánica, ¿por qué no esválido para todo tipo de fuerzas? Ponga un ejemplo de fuerza que sí locumpla y otro que no.
¿Por qué es útil el principio de conservación de la energía mecánica?
Si observamos que un paracaidista cae a velocidad constante, ¿pode-mos inferir la existencia de una fuerza no conservativa actuando en elsistema?
¿De qué modo podemos relacionar el trabajo de las fuerzas no conser-vativas con la variación de la energía mecánica?
En las situaciones en las que no se verifica el principio de conservaciónde la energía mecánica, ¿debemos renunciar a tener un principio deconservación para la energía?
EJEMPLO 3.7 Partícula que cae sobre una superficie esférica
Una partícula, de masa m, se encuentra sobre una superficie esférica de radio R. Lapartícula desliza sobre la superficie (se supone que el rozamiento es despreciable) hastaque pierde el contacto con ella. (a) Determinar el ángulo θ correspondiente al punto enque pierde contacto con la esfera. (b) Una vez que abandona la superficie esférica, ¿quémovimiento describirá la partícula? (c) Calcule el vector velocidad cuando la partículaimpacta en el suelo.
(a) En primer lugar debemos considerar que cuando la partícula pierde el contacto con lasuperficie es justamente cuando la fuerza normal que ésta hace sobre la partícula es nula(esto es, N = 0). Para encontrar esta condición debemos hacer el balance de fuerzas en ladirección normal. Según la figura adjunta, esto nos dice que
mg cosθ−N = man = mv2
R
de donde obtenemos que
N = m
(g cosθ− v2
R
).
La condición de normal nula (indicada por el subíndice 0) nos lleva a que
g cosθ0 = v20
R=⇒ v2
0 = g R cosθ0 .
Para calcular el ángulo θ0 al que esto ocurre debemos encontrar una relación adicional en-tre la velocidad y dicho ángulo. Esta relación adicional nos la proporciona la conservaciónde la energía mecánica de la partícula en el deslizamiento sobre la esfera (dado que noexiste fuerza de rozamiento y la fuerza normal no realiza trabajo). Esta condición nos dicequeda
∆Em = 0 =⇒ ∆Ec =−∆Ep
que puede escribirse para la presente situación como
1
2mv2
0 = mg R(1−cosθ0) =⇒ v20 = 2g R(1−cosθ0) .
Igualando ahora las dos expresiones que hemos obtenido para V 20 encontramos que
g R cosθ0 = 2g R(1−cosθ0) =⇒ cosθ0 = 2
3. (3.48)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
92 Tema 3. Dinámica de la partícula
La velocidad justo en dicho momento será
v0 =√
2g R
3.
(b) Una vez que la partícula ha perdido contacto con la esfera, nos encontramos con untípico moviemiento parabólico debido a la acción de la gravedad y cuya velocidad inicialserá
~v0 = v0 cosθ0x− v0 senθ0y .
Teniendo en cuenta que sinθ0 =p5/3, la velocidad inicial puede entonces escribirse como
~v0 =√
2g R
27(2x−p
5y) .
(c) Para calcular el vector velocidad justo en el momento del impacto del suelo, ~v f , pode-mos proceder de diferentes maneras. Aquí escogeremos el calcular primero el módulo dela velocidad justo en el momento del impacto (v f ). Para ello simplemente haremos uso de
trayectoriaparabólica
nuevo de la conservación de la energía mecánica entre el momento en que pierde contactoy el que llega al suelo:
∆Ec =−∆Ep
1
2m(v2
f − v20) =−mg (0−R cosθ0)
que nos lleva a
v2f = v2
0 + g R cosθ0
2
3g R +2g R
2
3g R = 2g R .
Dado que la velocidad en la dirección x no cambia (ax = 0), en el momento del impactocon el suelo será
v f x = v0x = 2
√2g R
27.
Para calcular la componente y de la velocidad (v f y ) haremos uso de que
v2f y = v2
f − v2f x = 2g R − 8g R
27= 46g R
27
lo que nos permite escribir finalmente que
~v f =√
2g R
27(2x−p
23y) .
Curvas de potencial (*)
Las gráficas que representan Ep (~r ) en función de ~r son un instrumento degran utilidad para entender el movimiento de una partícula, incluso sin necesi-dad de resolver la ecuación de movimiento. Consideremos por simplicidad que laenergía potencial solo depende de una variable x, esto es, Ep (x). Supongamos quela Figura 3.2 representa la curva de energía potencial para los diferentes valoresde x. La fuerza está dada por F = −dEp /dx, esto es, por la pendiente de la curvacambiada de signo. En las zonas en que Ep (x) es creciente su primera derivada espositiva y, por tanto F negativa (hacia la izquierda); es el caso de posiciones talesque x3 < x < x5 o x6 < x < x7 de la figura. Si la función Ep (x) es decreciente, Fresulta positiva, como en x < x3 o x5 < x < x6. En puntos tales como x3, x5, x6,o x ≥ x7, la pendiente de Ep (x) es cero, y por tanto en ellos la fuerza que actúasobre la partícula es nula, son puntos de equilibrio; si colocamos la partícula en
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.6. Trabajo y energía 93
x3 con velocidad nula se queda allí sin moverse. Este equilibrio es de tres tipos,que llamaremos: equilibrio estable, cuando al desplazar la partícula a izquierdao derecha, la fuerza tiende a volverla a la posición de equilibrio original (es el casode x = x3 y x = x6); equilibrio inestable, cuando al producir el mencionado des-plazamiento la fuerza aleja a la partícula de la posición de equilibrio (caso x = x5),y equilibrio indiferente cuando el resultado de un pequeño desplazamiento esuna nueva posición de equilibrio (caso x > x7). Como se aprecia en la figura, lostres equilibrios mencionados corresponden a mínimos, máximos o zonas de valorconstante, respectivamente, de la energía potencial.
FIGURA 3.2: Las líneas horizontales representan la energía total E que esconstante; se representan cuatro valores diferentes E1, E2, E3 y E4, dependiendoestos de las condiciones iniciales en el movimiento de la partícula. En cualquiercaso tiene que verificarse que E ≥ Ep (x), si esto no fuera cierto, la velocidad seríaimaginaria, lo que no tiene sentido físico.
Analicemos ahora las zonas en que puede moverse la partícula en función desu energía total. Supongamos que colocamos la partícula en la posición x5 y ledamos una velocidad hacia la izquierda tal que su energía total es E4, es decir,tal que Ec = E4 −Ep (x5). La partícula será acelerada desde x5 hasta x3 y se veráfrenada de x3 hacia la izquierda. Al llegar a x1 sus energías potencial y total soniguales, con lo que posee Ec = 0, o sea, se para en x1 y aparece una fuerza hacia laderecha, sentido en el que seguirá indefinidamente. El punto x1, con energía E4,es un punto de retorno que la partícula no puede superar; continuar a la izquierdade x1 supondría tener Ep > E y por tanto Ec < 0, lo que no tiene sentido físico porcorresponder a una velocidad imaginaria.
Si la energía total de la partícula es E3, tiene dos posibles zonas donde mover-se, y el que lo haga en una u otra depende de la posición inicial en que la colo-quemos; pero una vez colocada en una de ellas no podrá pasar a la otra, ya queentre ambas existe una barrera de potencial, que corresponde a un salto de ener-gía Ep (x5)−E3, inaccesible para para la partícula si no recibe acciones exteriores.Cuando la energía total de la partícula es E2 su movimiento está restringido a va-lores de x tales que x2 ≤ x ≤ x4. Las posiciones x2 y x4 son puntos de retorno, de
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
94 Tema 3. Dinámica de la partícula
velocidad nula, y posee velocidad máxima en x3 donde Ep es mínima. Con ener-gía total E1 solo puede estar en x3 y en reposo, y con E < E1 no puede existir lapartícula.
3.6.6. Energía del movimiento armónico simple
A partir de la ecuación (3.12) se puede calcular la energía cinética del movi-miento armónico simple,
Ec = 1
2mv2 = 1
2mω2
0 A2 sen2(ω0t +φ) .
Teniendo en cuenta que sen2(ω0t +φ)+cos2(ω0t +φ) = 1 se obtiene que
Ec = 1
2mω2
0 A2[1−cos2(ω0t +φ)]
Finalmente, haciendo uso de (3.11) llegamos a
Ec = 1
2mω2
0(A2 −x2) . (3.49)
Por tanto, en el movimiento armónico simple, la energía cinética es máxima en laposición de equilibrio x = 0 y nula en los extremos de la oscilación (x =±A).
Para obtener la energía potencial recordamos que
∆Ep =−∫ x2
x1
F dx .
Si tomamos el cero de energía potencial en la posición de equilibrio x = 0, apli-cando la Ley de Hooke (3.7), resulta
∆Ep =−∫ x2
x1
Fx dx =−∫ x2
x1
kxdx = 1
2k
(x2
1 −x22
)que, tras considerar (3.14), nos dice que
Ep (x) = 1
2kx2 = 1
2mω2
0x2 . (3.50)
Así pues, la energía potencial aumenta a medida que la partícula se acerca a los
Energía potencial elástica
extremos de oscilación. Como la fuerza es conservativa, la energía mecánica de-ber ser una cantidad constante:
Energía mecánica del MAS Em = Ec +Ep = 1
2mω2
0 A2 . (3.51)
Podemos considerar que durante una oscilación tiene lugar un intercambiocontinuo de energía cinética y potencial. Cuando la partícula está en un extremode la oscilación, toda la energía mecánica es energía potencial. Al moverse hacia laposición de equilibrio la energía potencial decrece a expensas de la energía ciné-tica. En el punto de equilibrio toda la energía está ya en forma de energía cinética.El proceso se invierte al alejarse de la posición equilibrio. En la figura adjunta serepresenta este proceso.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.7. Momento lineal 95
3.7. Momento lineal
3.7.1. Expresión alternativa segunda ley de Newton
En las secciones anteriores, hemos visto que la velocidad de un objeto nospermite cuantificar la rapidez y la dirección de su movimiento. En este apartadocomprobaremos que esta definición no es suficiente para caracterizar adecua-damente la naturaleza del movimiento. Como ejemplo, supongamos dos objetosque se mueven hacia nosotros, cada uno de ellos con una velocidad de 2 m/s. Unoes una pelota de ping-pong y el otro es un camión. Probablemente, tengamos in-tuitivamente claro cuál de los dos seríamos capaces de parar con el cuerpo. Am-bos se mueven con la misma velocidad, pero algo nos dice que el camión tiene unmovimiento “de mayor entidad”. Podemos usar entonces el concepto de “canti-dad de movimiento” para describir esa diferencia entre estos dos objetos móviles.El momento lineal o cantidad de movimiento de un objeto de masa m que semueve con una velocidad ~v se define entonces como el producto de la masa porsu velocidad:
~p = m~v . (3.52)
Dado que el momento lineal es igual al producto de un escalar m por un vector~v ,
Momento linealo cantidad de movimiento
se trata de una magnitud vectorial. Su dirección es la misma que la de ~v .
A partir de su definición podemos notar que el concepto de momento lineal síproporciona una diferencia cuantitativa entre objetos con masas diferentes que semueven con la misma velocidad. Por ejemplo, el momento lineal del camión quese mueve con una velocidad de 2 m/s es mucho mayor en módulo que el de la pe-lota de ping-pong que se mueve a la misma velocidad. En consecuencia, podemosconsiderar el momento lineal como una medida de la dificultad para llevar unapartícula hasta el reposo. Fue Newton quien denominó al producto m~v cantidadde movimiento, que es quizás una descripción más gráfica que el término mo-mento lineal, aunque nosotros usaremos más frecuentemente la denominaciónde momento lineal
Aplicando la segunda ley de Newton, podemos relacionar el momento lineal ocantidad de movimiento de una partícula con la fuerza neta que actúa sobre ella.Recordemos que la segunda ley de Newton se puede escribir como
∑~F = m~a = m
d~v
dt.
Sin embargo, esta expresión matemática de la ley solo puede aplicarse cuandola masa de la partícula permanece constante. En situaciones en las que la masavaría con el tiempo, debe utilizarse una expresión alternativa de la segunda ley deNewton que nos dice que la derivada del momento lineal con respecto al tiempoes igual a la fuerza neta que actúa sobre la partícula:
Segunda Ley de Newton para unapartícula de masa variable
∑~F = d~p
dt. (3.53)
Si la masa de la partícula es constante, la ecuación anterior se reduce a la pri-mera expresión (3.2) que vimos la segunda ley de Newton. Es difícil imaginar unapartícula cuya masa varíe pero, si se piensa en objetos no puntuales, enseguidapodemos encontrar varios ejemplos: un cohete que expulsa combustible a medi-da que se mueve, una bola de nieve rodando por una montaña y que va hacién-dose cada vez más grande, o una camioneta con un depósito abierto en la partetrasera que se va llenando de agua mientras llueve.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
96 Tema 3. Dinámica de la partícula
A partir de la ecuación (3.53) vemos que si la fuerza neta sobre un objeto esigual a cero, la derivada respecto del tiempo del momento lineal es cero y, portanto, el momento lineal del objeto debe ser constante. Esto resulta familiar, yaque es el caso de una partícula en equilibrio expresado en función del momentolineal. Por supuesto, si la partícula está aislada (es decir, si no interacciona con suentorno), entonces ninguna fuerza actúa sobre ella y ~p no varía: esta es la primeraley de Newton.
Actividad 3.17:
Si la fuerza que actúa sobre una partícula es conservativa, el momentolineal de la partícula no varía. ¿Verdadero o Falso? Razone su respuesta.
Si la fuerza que actúa sobre una partícula está dirigida según el eje x, elmomento lineal de la partícula en la dirección y no varía. ¿Verdaderoo Falso? Razone su respuesta.
Si la masa del objeto no varía con el tiempo no podemos usar la expre-sión (3.53) de la segunda ley de Newton. ¿Verdadero o Falso? Razonesu respuesta.
3.7.2. Impulso y momento lineal
Como describe la ecuación (3.53), el momento lineal de una partícula varíasi una fuerza neta actúa sobre ella. Supongamos que una fuerza neta
∑~F actúa
sobre una partícula y que esta fuerza puede variar con el tiempo. De acuerdo conla ecuación (3.53), podemos escribir que
d~p = (∑~F
)dt .
Si integramos esta expresión para hallar la variación del momento lineal de unapartícula durante el intervalo de tiempo ∆t = t f − ti obtenemos que
∆~p = ~p f −~pi =∫ t f
ti
(∑~F
)dt .
La integral de una fuerza durante el intervalo de tiempo en el que ésta actúa sedenomina impulso de la fuerza. El impulso de la fuerza neta es un vector definidopor
~I ≡∫ t f
ti
(∑~F
)dt =∆~p . (3.54)
Por tanto, el impulso total de la fuerza neta∑~F sobre una partícula es igual a
Impulso de una fuerza
la variación del momento lineal de la partícula. Esta afirmación, conocida comoel teorema impulso-cantidad de movimiento, es equivalente a la segunda ley deNewton.
A partir de la definición, vemos que el impulso es una magnitud vectorial cuyomódulo es igual al área comprendida bajo la curva del módulo de la fuerza netaen función del tiempo, como se describe en la figura adjunta. En esta figura sesupone que la fuerza neta varía con el tiempo de la manera general indicada yque es distinta de cero en el intervalo de tiempo ∆t = t f − ti . El vector impulsotiene la misma dirección que la variación del momento lineal. Las dimensionesdel impulso son iguales que las del momento lineal.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.7. Momento lineal 97
Dado que generalmente la fuerza puede variar con el tiempo, como se muestraen la figura (a), es recomendable definir una fuerza neta promediada en el tiempo,~FT , del siguiente modo:
~FT ≡ ⟨∑~F
⟩= 1
∆t
∫ t f
ti
(∑~F
)dt
donde ∆t = t f − ti . Por tanto, podemos expresar la ecuación (3.54) como
~I =∆~p = ~FT∆t . (3.55)
El módulo de esta fuerza neta media, como se ilustra en la figura (b), puede in-terpretarse como el módulo de una fuerza constante neta que proporcionaría elmismo impulso a la partícula en el intervalo de tiempo ∆t que la fuerza neta va-riable en el mismo intervalo de tiempo.
Actividad 3.18:
En el caso de que las fuerzas que actúan sobre la partícula sean noconservativas, ¿se verifica que~I =∆~p ? Razone su respuesta.
¿Siempre que ∆~p = 0 tendremos que~I = 0 ?
Si tenemos que ∆~p ≈ 0, ¿qué otra condición además de ~FT ≈ 0 podríaocasionarlo?
EJEMPLO 3.8 Un vagón de carga de masa mv = 14.000 kg se mueve horizontalmente conuna velocidad vi = 4m/s hacia un dispensador de grano. Justo cuando el vagón estádebajo, el dispensador suelta repentinamente una masa mg = 2000 kg de grano en elvagón. Calcule el tiempo que necesita el vagón para recorrer una distancia D posteriorde 500m. Suponga que el grano cae verticalmente sobre el vagón y que no hay fricciónde las ruedas del vagón con los raíles.
x
y
En el presente problema debemos observar que la única fuerza externa relevante quese ejerce sobre el vagón (nuestro sistema) es la proveniente de la dispensación del grano;es decir, solo tiene componente vertical (a lo largo del eje y). Esto implica que el impulsoen la dirección horizontal es nulo, provocando la conservación del momento lineal en estadirección:
~Ix = 0 =⇒∆~px = 0 .
Podemos establecer por tanto la siguiente relación entre las componentes horizontales delos momentos lineales del vagón “antes” y “después” de recibir el grano:
px (antes) = px (después) .
Si denominamos vd al módulo de la velocidad “después” de recibir mg cantidad de grano,podremos escribir la anterior ecuación como
mv vi = (mv +mg )vd
y, por tanto,
vd = mv
mv +mgvi =
14 ×103
14 ×103 +2 ×103×4 = 3,5m/s .
Una vez que tenemos la velocidad posterior a la carga del grano, dado que no hay roza-miento, ésta se mantendrá constante, por lo que el tiempo ∆t en recorrer una distancia Dvendrá dado simplemente por
∆t = L
vd= 500
3,5≈ 142,86s .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
98 Tema 3. Dinámica de la partícula
3.8. Momento angular
Consideremos una partícula de masa m, con un vector de posición~r con res-pecto a cierto sistema de referencia y que se mueve con un momento lineal ~p,como se indica en la figura. Definimos el momento angular, ~L, de la partícularelativo al origen O como el producto vectorial de su vector de posición instantá-neo~r por su momento lineal ~p:
~L =~r ×~p . (3.56)Momento angular
Es importante observar que tanto el módulo como la dirección y sentido de~Ldependen del origen que se elija. La dirección de~L es perpendicular al plano for-mado por~r y ~p, y el sentido de~L está indicado por la regla de la mano derecha.En el ejemplo de la figura se supone que~r y ~p se encuentran en el plano x y y~Lapunta en el sentido positivo del eje z. Dado que ~p = m~v , el módulo de~L es
x
y
z
L = mvr senφ
donde φ es el ángulo formado por ~r y ~p. Se deduce que ~L es cero cuando ~r esparalelo (o antiparalelo) a ~p. En otras palabras, cuando la partícula se mueve alo largo de una línea que pasa por el origen, tiene un momento angular cero conrespecto a ese origen. Por otro lado, si~r es perpendicular a ~p, L es máximo e iguala mvr . De hecho, en ese instante la partícula se mueve exactamente igual que siestuviera en el borde de una rueda que gira alrededor del origen, sobre un planodefinido por~r y ~p. Una partícula tiene un momento angular distinto de cero conrespecto a algún punto si el vector de posición de la partícula medido desde esepunto gira alrededor de dicho punto a medida que la partícula se mueve.
En el caso del movimiento de traslación, descubrimos que la fuerza neta so-bre una partícula era igual a la derivada respecto al tiempo del momento lineal(3.53). Demostraremos ahora que, a partir de de la segunda ley de Newton, se de-duce una situación similar para el movimiento de rotación (o traslación cíclica);es decir, que el momento de la fuerza neta que actúa sobre una partícula es igual ala derivada respecto al tiempo del momento angular de dicha partícula. Comen-cemos por derivar la ecuación (3.56) respecto al tiempo. Utilizando la regla delproducto de las derivadas nos queda
d~L
dt= d~r
dt×~p +~r × d~p
dt.
El primer sumando de la ecuación anterior es nulo dado que~v = d~r /dt es paraleloa ~p, por lo que nos queda
d~L
dt=~r × d~p
dt.
Si definimos el momento de una fuerza que actúa sobre la partícula en la po-sición~r respecto a cierto sistema de referencia como el siguiente vector:
~τ=~r ×~F (3.57)
tenemos que
Momento de una fuerza
d~L
dt=~r × (
∑~F ) =~r ×~Fneta
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.8. Momento angular 99
o, equivalentemente,Relación entre momento de una fuer-za y el momento angular~τneto = d~L
dt(3.58)
donde~τneto =~r ×~Fneta. Este resultado es el equivalente de la segunda ley de New-ton (3.53) para el movimiento de rotación de una partícula en torno a un puntode referencia. Es importante observar que la ecuación (3.58) es válida solamentesi los orígenes de~τneto y~L son el mismo (es decir, si ambos están tomados en elmismo sistema de referencia).
Fuerzas centrales
Cuando la única fuerza que actúa sobre una partícula es una fuerza ~F tal quesu recta soporte pase siempre por un punto fijo O se dice que la partícula se muevebajo una fuerza central, y el punto O recibe el nombre de centro de fuerzas. Alpasar la recta soporte de ~F siempre por O resulta que, respecto a dicho punto,~ry ~F son paralelos y, en consecuencia,
~τ=~r ×~F = 0 .
De acuerdo con (3.58) obtenemos igualmente que
d~L
dt= 0 (3.59)
y, por tanto, el momento angular de una partícula bajo fuerzas centrales es cons-tante tanto en módulo como en dirección y sentido.
Puesto que~L = m~r ×~v , se deduce que la partícula describirá una trayectoriaque estará contenida en un plano fijo perpendicular a~L. La importancia de estosresultados radica en el hecho de que la fuerza gravitatoria ejercida por el Sol so-bre un planeta o por la Tierra sobre un satélite artificial (o la Luna) es una fuerzacentral. También lo son las fuerzas electrostáticas ejercidas por los núcleos sobrelos electrones de un átomo.
Actividad 3.19:
¿Es el momento angular ~L de una partícula dependiente del sistemade coordenadas elegido? Compare el caso del momento angular con eldel momento lineal.
¿Para un~r y ~p dados, ¿bajo qué condiciones es el módulo del momentoangular máximo? ¿Y cuándo es mínimo?
Escriba una expresión que relacione la derivada temporal del momen-to angular de una partícula con la de su momento lineal.
¿En qué situaciones tendremos que el momento angular de una partí-cula se conserva?
Si se conserva el módulo del momento lineal de una partícula, ¿lo haráigualmente el módulo de su momento angular?
JCM,FLML Apuntes de Física 1
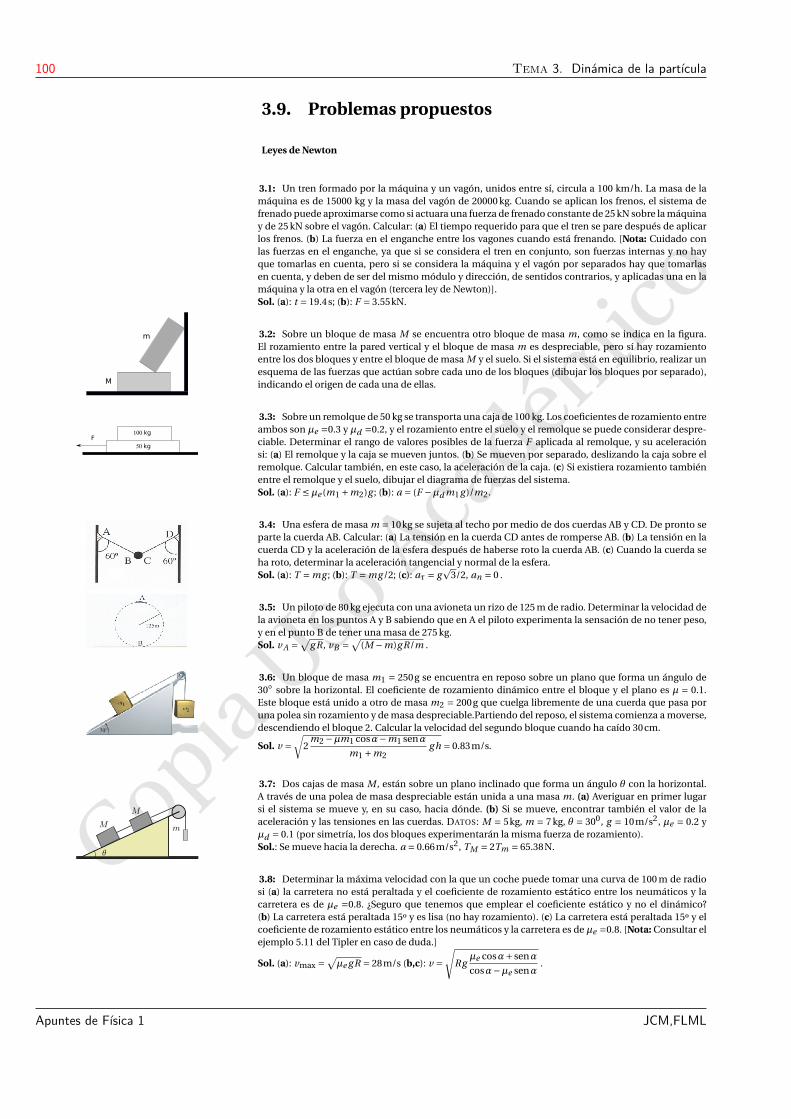
CopiaUso
Académico
100 Tema 3. Dinámica de la partícula
3.9. Problemas propuestos
Leyes de Newton
3.1: Un tren formado por la máquina y un vagón, unidos entre sí, circula a 100 km/h. La masa de lamáquina es de 15000 kg y la masa del vagón de 20000 kg. Cuando se aplican los frenos, el sistema defrenado puede aproximarse como si actuara una fuerza de frenado constante de 25 kN sobre la máquinay de 25 kN sobre el vagón. Calcular: (a) El tiempo requerido para que el tren se pare después de aplicarlos frenos. (b) La fuerza en el enganche entre los vagones cuando está frenando. [Nota: Cuidado conlas fuerzas en el enganche, ya que si se considera el tren en conjunto, son fuerzas internas y no hayque tomarlas en cuenta, pero si se considera la máquina y el vagón por separados hay que tomarlasen cuenta, y deben de ser del mismo módulo y dirección, de sentidos contrarios, y aplicadas una en lamáquina y la otra en el vagón (tercera ley de Newton)].Sol. (a): t = 19.4s; (b): F = 3.55kN.
3.2: Sobre un bloque de masa M se encuentra otro bloque de masa m, como se indica en la figura.El rozamiento entre la pared vertical y el bloque de masa m es despreciable, pero sí hay rozamientoentre los dos bloques y entre el bloque de masa M y el suelo. Si el sistema está en equilibrio, realizar unesquema de las fuerzas que actúan sobre cada uno de los bloques (dibujar los bloques por separado),indicando el origen de cada una de ellas.
m
M
3.3: Sobre un remolque de 50 kg se transporta una caja de 100 kg. Los coeficientes de rozamiento entreambos son µe =0.3 y µd =0.2, y el rozamiento entre el suelo y el remolque se puede considerar despre-ciable. Determinar el rango de valores posibles de la fuerza F aplicada al remolque, y su aceleraciónsi: (a) El remolque y la caja se mueven juntos. (b) Se mueven por separado, deslizando la caja sobre elremolque. Calcular también, en este caso, la aceleración de la caja. (c) Si existiera rozamiento tambiénentre el remolque y el suelo, dibujar el diagrama de fuerzas del sistema.Sol. (a): F ≤µe (m1 +m2)g ; (b): a = (F −µd m1g )/m2.
3.4: Una esfera de masa m = 10kg se sujeta al techo por medio de dos cuerdas AB y CD. De pronto separte la cuerda AB. Calcular: (a) La tensión en la cuerda CD antes de romperse AB. (b) La tensión en lacuerda CD y la aceleración de la esfera después de haberse roto la cuerda AB. (c) Cuando la cuerda seha roto, determinar la aceleración tangencial y normal de la esfera.Sol. (a): T = mg ; (b): T = mg /2; (c): aτ = g
p3/2, an = 0 .
3.5: Un piloto de 80 kg ejecuta con una avioneta un rizo de 125 m de radio. Determinar la velocidad dela avioneta en los puntos A y B sabiendo que en A el piloto experimenta la sensación de no tener peso,y en el punto B de tener una masa de 275 kg.Sol. v A =√
g R, vB =√(M −m)g R/m .
3.6: Un bloque de masa m1 = 250g se encuentra en reposo sobre un plano que forma un ángulo de30◦ sobre la horizontal. El coeficiente de rozamiento dinámico entre el bloque y el plano es µ = 0.1.Este bloque está unido a otro de masa m2 = 200g que cuelga libremente de una cuerda que pasa poruna polea sin rozamiento y de masa despreciable.Partiendo del reposo, el sistema comienza a moverse,descendiendo el bloque 2. Calcular la velocidad del segundo bloque cuando ha caído 30cm.
Sol. v =√
2m2 −µm1 cosα−m1 senα
m1 +m2g h = 0.83m/s.
3.7: Dos cajas de masa M , están sobre un plano inclinado que forma un ángulo θ con la horizontal.A través de una polea de masa despreciable están unida a una masa m. (a) Averiguar en primer lugarsi el sistema se mueve y, en su caso, hacia dónde. (b) Si se mueve, encontrar también el valor de laaceleración y las tensiones en las cuerdas. DATOS: M = 5kg, m = 7 kg, θ = 300, g = 10m/s2, µe = 0.2 yµd = 0.1 (por simetría, los dos bloques experimentarán la misma fuerza de rozamiento).Sol.: Se mueve hacia la derecha. a = 0.66m/s2, TM = 2Tm = 65.38N.
3.8: Determinar la máxima velocidad con la que un coche puede tomar una curva de 100 m de radiosi (a) la carretera no está peraltada y el coeficiente de rozamiento estático entre los neumáticos y lacarretera es de µe =0.8. ¿Seguro que tenemos que emplear el coeficiente estático y no el dinámico?(b) La carretera está peraltada 15º y es lisa (no hay rozamiento). (c) La carretera está peraltada 15º y elcoeficiente de rozamiento estático entre los neumáticos y la carretera es de µe =0.8. [Nota: Consultar elejemplo 5.11 del Tipler en caso de duda.]
Sol. (a): vmax =õe g R = 28m/s (b,c): v =
√Rg
µe cosα+ senα
cosα−µe senα.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.9. Problemas propuestos 101
3.9: Sobre un tablero inclinado con un ángulo de 30◦ se colocan dos cuerpos A y B de masa 4 y 3 kgrespectivamente. El coeficiente de rozamiento dinámico entre el bloque A y el plano inclinado es de 0.1,y entre el bloque B y dicho plano 0.2. Los bloques se mueven. (a) ¿Cómo deslizarán los cuerpos, juntoso separados? (b) Calcular la aceleración de cada cuerpo y la reacción en la superficie de contacto entrelos bloques (si la hubiera). (c) Calcular la velocidad común o de de cada cuerpo después de habersedesplazado 5 m a lo largo del plano inclinado.Sol. (a): Deslizan juntos pues aceleración del cuerpo situado más arriba es mayor. (b): a = 3,69m/s2.(c): v = 6.07m/s.
3.10: En el sistema de la figura el bloque que está sobre el plano inclinado tiene una masa m1 = 2m2,donde m2 es la masa del cuerpo que cuelga. El coeficiente de rozamiento estático del bloque con lasuperficie es µe = 1/
p3 y las masas de la cuerda y las poleas son despreciables. Calcular el ángulo de
inclinación mínimoαc para que el sistema se mueva, y averiguar hacia dónde se movería (por ejemplo,si el bloque 2 sube o baja).Nota: Es un problema algo más complicado. Analizar con cuidado cómo están relacionadas las acelera-ciones de los dos bloques. Tampoco está claro el sentido de la fuerza de rozamiento, ya que depende delsentido de movimiento. Suponer que no hay rozamiento y averiguar hacia dónde se mueve, considerarposteriormente que sí existe rozamiento, y calcular αc .Sol. (a): Sin rozamiento, a = g /3(senα−1) < 0, m1 sube. (b): Con rozamiento, µe cosαc + senα = 1 ⇒αc =π/6.
Movimiento armónico simple
3.10: Una manzana que pesa 1 N se cuelga del extremo de un resorte largo con constante de fuerzak = 1.5N/m y masa despreciable de modo que se mueve hacia arriba y hacia abajo realizando un M.A.S.Si se detiene este movimiento y ahora se hace oscilar la manzana de un lado a otro con un ángulode oscilación pequeño, la frecuencia de este péndulo simple resulta ser la mitad de la frecuencia delmovimiento oscilante vertical. ¿Cuál es la longitud del resorte sin estirar (quitando la manzana)?Sol. L = 8/3m.
3.11: Un objeto de masa m = 2kg oscila de modo que su movimiento puede describirse por la ecua-ción x(t ) = 5cos(10πt +π/3) m, donde x indica el desplazamiento desde el punto de equilibrio (enmetros), el tiempo está en segundos y los ángulos en radianes. (a) Calcule el tiempo ∆t que tarda endar 12 oscilaciones. (b) Calcule el número de oscilaciones N que realiza en 12 segundos. (c) Halle laenergía cinética máxima que puede tener el objeto en su movimiento, y el valor (o valores) de x corres-pondiente(s) al instante en el que esta energía es máxima. (d) Calcule la energía potencial máxima quepuede tener el objeto en su movimiento, y el valor (o valores) de x correspondiente(s) al instante en elque esta energía es máxima.Sol. (a): ∆t = 2,4s. (b): N = 60oscilaciones. (c): Ec,max = 24674J; x = 0. (d): Ep,max = 24674J; x =±5m.
Trabajo y energía
3.12: Un bloque de 6 kg, en reposo, se eleva 3 m mediante una fuerza vertical de 80 N. Calcular: (a) Eltrabajo realizado por la fuerza de 80 N. (b) El trabajo realizado por la gravedad. (c) La velocidad conla que llega a ese punto por dos caminos distintos, resolviendo el problema dinámico para encontrarla aceleración y luego la velocidad, y luego mediante la relación entre trabajo realizado por todas lasfuerzas y la variación de la energía cinética. (d) Si analizamos el resultado, veremos que la variación dela energía potencial gravitatoria, con signo menos, no es igual a la variación de la energía cinética. ¿Porqué?Sol. (a): W = 240J; (b): W = 174.6J ; (c): v f = 4.6m/s.
3.13: Antes de abrir el paracaídas, un paracaidista en caída libre tiene una velocidad límite de aproxi-madamente 200 km/h y una vez abierto de 20 km/h. Si su masa es de 80 kg, calcular la potencia disipadapor la fricción con el aire antes y después de abrir el paracaídas. Nota: debido a la fricción con el aire, ydespués de un tiempo, la fuerza debida al peso del paracaidista se compensa con la fricción, y cae convelocidad constante, velocidad que se denomina velocidad límite.Sol. (a): Antes, P =−43512W; (b): después, P =−4351W.
3.14: Un tren, de masa 2×106 kg, recorre una distancia de 62 km a una velocidad constante de 15 km/h,subiendo una altura de 707 m. La fuerza de rozamiento total tiene módulo constante, de valor 0.8 vecessu peso, y dirección y sentido siempre opuesta al movimiento. (a) Calcular la variación de la energíacinética, energía potencial y energía mecánica del tren. (b) La energía disipada por el rozamiento (nor-malmente esta energía acaba transformándose en calor que se cede al entorno). (c) La potencia de lalocomotora.Sol. (a): ∆Ec = 0, ∆Ep = 1.39 ×1010 J, ∆Em = 1.39 ×1010 J; (b): Edis = 9.4 ×1011 J ; (c): P )66.34MW.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
102 Tema 3. Dinámica de la partícula
3.15: Una partícula, de masa m, se encuentra sobre una superficie esférica de radio R. La partículadesliza sobre la superficie (se supone que el rozamiento es despreciable) hasta que pierde el contactocon ella. (a) Determinar el ángulo θ correspondiente al punto en que pierde contacto con la esfera.(b) Una vez que abandona la superficie esférica, ¿qué movimiento describirá la partícula? (c) ¿A quédistancia del centro de la esfera impactará contra el suelo?Sol. (a): cosθ = 2/3; (b): Trayectoria parabólica; (c): 1.29R
3.16: Una vagoneta de masa m desliza sobre un rail sin rozamiento a lo largo de un rizo, como seindica en la figura. La vagoneta se mueve sin perder en ningún momento el contacto con el rail. Si en
m
hR el instante inicial la vagoneta está en reposo a una altura h, determine el valor mínimo de esa altura h
(en función de m, R y la gravedad g ) para que consiga superar el rizo.Sol. h = 5R/2
3.17: El bloque 1 de 4 kg desliza sobre el suelo debido al peso del bloque 2 de 2 kg que baja. El coefi-ciente dinámico de rozamiento entre el bloque 1 y el suelo es de 0.35, y el sistema parte del reposo.(a) Calcular la velocidad de los bloques cuando el bloque 2 ha bajado 2 m. (b) Determinar la variaciónde la energía cinética, potencial y mecánica del sistema en el supuesto anterior. (c) Calcular también laenergía disipada por rozamiento. Nota: La polea y la cuerda tienen masa despreciable.
Sol. (a): v =√
2g h(m2 −µm1)
m1 +m2= 1.98m/s; (b): ∆Ec = 11,76J, ∆Ep =−39.2J, ∆Em =−27.44J;
(c): Wroz =−27.44J.
3.18: Un campo de fuerzas dado por ~F = y x − x y N (x, y en m) actúa sobre una partícula, que semueve desde el punto (0,1) m hasta el punto (1,0) m. (a) Calcular el trabajo realizado por esta fuerza sila partícula se desplaza en primer lugar por el eje y hasta el origen y luego por el eje x. (b) Calcular eltrabajo realizado por esta fuerza si la partícula se desplaza en línea recta desde el punto inicial al final.(c) ¿Es este campo conservativo?Sol. (a): W = 0; (b): W = 1J; (c): No.
3.19: Cuando la escuadra ABC gira muy despacio en sentido antihorario, el bloque de 6 kg comienza adeslizar hacia el muelle cuando θ = 15◦. En esa situación (θ = 15◦), el bloque desliza una distancia d =250mm e impacta contra el muelle, observándose un acortamiento máximo de δ= 50mm. Determinarlos coeficientes de rozamiento estático y dinámico.
Sol.: µe = tanθ = 0.268, µd = tanθ− kδ2
2mg cosθ(d +δ)= 0.151
3.20: (Problema opcional pero bastante interesante).La energía potencial correspondiente a la fuerza que existe entre dos átomos en una molécula diató-mica puede expresarse, con un alto grado de aproximación, como U (r ) = a/r 12 −b/r 6 (Potencial deLennard-Jones), donde r es la distancia entre los átomos y a y b dos constantes positivas. (a) Determi-nar la fuerza que actúa sobre un átomo en función de r (recordar que F =−dU (r )/dr ). (b) Mediante eluso de un ordenador, y dando diversos valores a los parámetros a y b, trazar las gráficas de U (r ) y F (r )como funciones de r . Intentar explicar, cualitativamente, por qué este potencial puede describir bieneste tipo de fuerzas (consultar en libros o Internet). (c) Encontrar, en función de a y b, la distancia deequilibrio entre los dos átomos. ¿Es estable el equilibrio? (observad la forma de la curva y recordar queen un mínimo, relativo, la derivada se hace nula). (d) Si los dos átomos están en equilibrio, ¿qué energíamínima debería suministrarse a la molécula para disociarla? (es decir, para separar los dos átomos). (e)Para la molécula de CO, la distancia de equilibrio entre los átomos de C y O es de 1.13 Å(1 Å= 10−10
m, unidad que se utiliza bastante en este contexto ya que la distancia típica entre átomos es de esteorden) y la energía de disociación es de 9.6 eV por molécula (1eV=1.6 ×10−19 J, unidad de energía quese utiliza bastante en este contexto, ya que el julio resulta ser muy grande, ¿es casualidad que el factorde conversión sea numéricamente igual, en valor absoluto, a la carga del electron?). Calcular los valoresde a y b.
Sol. (a): F = 12a
r 13− 6b
r 7; (c): r0 =
(2a
b
)1/6; (d): E = b2
4a.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
3.9. Problemas propuestos 103
Impulso y momento lineal
3.21: Un objeto de masa m = 100g está situado al inicio de la rampa que se muestra en la figura.Sobre este objeto actúa una fuerza media Fm = 100N durante 10 ms. Sabiendo que el coeficiente derozamiento dinámico es µd = 0,2, calcule: (a) la velocidad v0 que adquiere el objeto tras la acción delimpulso inicial; (b) la velocidad final v f con que llega dicho objeto al final de la rampa; (c) la alturamáxima hmax que alcanza el objeto una vez que abandona la rampa.Sol. (a): v0 = 10m/s, (b): v f =p
60m/s , (c): hmax = 5,75m.
Fuerzas centrales y momento angular
3.22: Una pequeña bola gira con velocidad (módulo) v , sobre una superficie sin rozamiento, descri-biendo una circunferencia de radio r , mientras es sostenida por un hilo de masa despreciable, comose indica en la figura. Si tiramos del hilo y el radio disminuye a la mitad, ¿con qué velocidad se moveráahora la bolita?Sol.: v f = 2v .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico

CopiaUso
Académico
TEMA 4
Sistemas de partículas. Sólidorígido.
4.1. Introducción
En temas anteriores siempre hemos considerado que los objetos de estudioeran puntuales; es decir, toda su masa estaba concentrada en un punto. Los obje-tos no tenían forma y por tanto no podían tampoco girar sobre sí mismos. Cier-tamente la suposición anterior es muy restrictiva, aunque es una aproximaciónmuy válida en multitud de situaciones prácticas. Queremos ahora extender nues-tro estudio del movimiento y las fuerzas que lo producen a objetos que no esténconstituidos por una sola partícula sino por un sistema de partículas. Entre es-tos objetos estarían los objetos que tradicionalmente llamamos sólidos, líquidosy gases. En el presente tema empezaremos estudiando los sistemas de partículaspuntuales (sistemas discretos) cuyas posiciones relativas no cambian. Posterior-mente trataremos sistemas continuos de masa en los que de nuevo la posición re-lativa de sus partículas elementales constituyentes no cambia y que conoceremoscon el nombre de sólido rígido. Un estudio introductorio de los fluidos (donde lasposiciones relativas sí varían) queda postergado hasta el tema siguiente.
4.2. Centro de masas
Sea un sistema de N partículas, cada una con masa mi y posición~ri con res-pecto a cierto sistema de referencia. Definimos su centro de masas como
~rcm =∑
mi~ri∑mi
=∑
mi~ri
M. (4.1)
Notemos que ~rcm puede interpretarse como la posición media de las partículasdel sistema ponderada por la masa de cada partícula; esto es, la posición del cen-tro de masas estará más cercana de las partículas más masivas que de las quetengan menos masa.
En el caso de que tratemos con un cuerpo sólido rígido debemos considerarque éste esta formado por un continuo de partículas de masa infinitesimal cuyaposición relativa permanece constante (en otro caso no lo denominaremos “só-lido” sino “fluido”). Este hecho nos permite definir el centro de masas de dicho
105

CopiaUso
Académico
106 Tema 4. Sistemas de partículas
cuerpo sólido como
~rcm = lım∆m→0
∑∆m~ri∑∆m
=∫~r dm∫dm
=∫~r dm
M. (4.2)
Debemos notar que existen múltiples situaciones en las que la posición delcentro de masas puede obtenerse sin necesidad de realizar cálculos. Estas situa-ciones son aquellas en las que existen simetrías aparentes en el sistema y la dis-tribución de masa en el sistema es homogénea (su densidad de masa no varía conla posición). Igualmente debemos notar que también podremos calcular de for-ma sencilla la posición del centro de masas de un cuerpo homogéneo de formacomplicada pero reducible a la superposición de formas geométricas sencillas enlas que sepamos a priori la posición de su centro de masa.
La expresión para el centro de masas de un sistema de partículas puede deri-varse con respecto al tiempo y así obtener la velocidad y la aceleración del centrode masas, que vendrán dadas por las siguientes expresiones:
d~rcm
dt≡~vcm =
∑mi~vi
M(4.3)
d~vcm
dt≡~acm =
∑mi~ai
M. (4.4)
Es interesante notar que si describiéramos la posición ~ri de cada partícula ien función de la posición del centro de masas~rcm y la posición relativa desde el
centro de masas
* centro de masas~r∗i , es decir
~ri =~rcm +~r∗i (4.5)
entonces, al derivar la expresión anterior también obtendríamos que
~vi =~vcm +~v∗i . (4.6)
Si ahora sumamos las expresiones anteriores ponderándolas con la masa de cadapartícula tenemos que∑
mi~ri =∑
mi~rcm +∑mi~r
∗i = M~rcm +∑
mi~r∗i (4.7)∑
mi~vi =∑
mi~vcm +∑mi~v
∗i = M~vcm +∑
mi~v∗i (4.8)
de donde podemos deducir las dos siguientes igualdades importantes:∑mi~r
∗i = 0 (4.9)∑
mi~v∗i = 0 (4.10)
sin más que recordar las definiciones dadas en (4.1) y (4.3).
Actividad 4.1:
La posición absoluta/relativa del centro de masas de un sistema, ¿de-pende de la elección del origen de coordenadas?
¿Dónde se sitúa el centro de masas de una superficie esférica cuya den-sidad de masa depende de la distancia al centro de la esfera?
Demuestre que∑
mi~r∗i = 0 simplemente quiere decir que la posición
del centro de masas tomando como origen de coordenadas el propiocentro de masas es nula.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.3. Momento lineal de un sistema de partículas 107
4.3. Momento lineal de un sistema de partículas
Para un sistema de partículas definimos el momento lineal del sistema, ~psis,como la superposición de los momentos lineales de cada una de las partículas dedicho sistema,
~psis =∑~pi =
∑mi~vi . (4.11)
Si tenemos en cuenta la definición de la velocidad del centro de masas dada en(4.3), la expresión del momento lineal del sistema puede igualmente escribirsecomo
~psis = M~vcm ≡ ~pcm . (4.12)
Notemos que podemos identificar ~pcm con el momento lineal de una única par-tícula de masa M cuya velocidad es justamente la velocidad del centro de masasdel sistema de partículas original.
4.3.1. Relación fuerza - momento lineal
Al derivar con respecto al tiempo la expresión del momento lineal del sistemade partículas obtenemos que
d~psis
dt=∑
mi~ai =∑~Fi =
∑~Fi ,ext +
∑~Fi ,int (4.13)
donde hemos expresado la fuerza que afecta a cada partícula, ~Fi , como
~Fi = ~Fi ,ext +~Fi ,int (4.14)
es decir, como la suma de dos términos: uno debido a las fuerzas externas al siste-ma (por ejemplo, la fuerza de la gravedad terrestre) y otro causado exclusivamentepor las fuerzas internas entre las partículas del sistema (por ejemplo, fuerzas decontacto).
Dado que en nuestro sistema de partículas las fuerzas internas se ejercen siem-pre entre pares de partículas, y estas fuerzas verifican la tercera ley de Newton,tenemos que la fuerza ~fi j que ejerce la partícula j sobre la partícula i verificaráque
~fi j =−~f j i . (4.15)
Esto implica que la suma de todas las fuerzas internas tienen componente nula;es decir, ∑
i
~Fi ,int =∑
i
∑j 6=i
~fi j = 0 (4.16)
lo cual nos permite escribir (4.13) como
d~psis
dt= ~Fext ≡
∑~Fi ,ext (4.17)
donde ~Fext representa la fuerza externa neta. Equivalentemente, la expresión an-terior se puede reescribir como
d~pcm
dt= ~Fext (4.18)
lo que nos indica claramente que la dinámica del centro de masas del sistema soloviene determinada por la suma total de las fuerzas externas. Así, por ejemplo, latrayectoria de caída del centro de masa de un saltador de trampolín siempre será
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
108 Tema 4. Sistemas de partículas
la misma independiente del tipo de acrobacias que haga durante el salto (ya queestas acrobacias son provocadas únicamente por la acción de fuerzas internas).
En aquellos sistemas en los que la resultante de las fuerzas externas sea nulo(~Fext =∑
~Fi ,ext = 0),1 tendremos que
d~psis
dt= 0 (4.19)
esto es, el momento lineal del sistema se conserva:
~psis = Cte . (4.20)
Este resultado se conoce como ley de conservación del momento lineal, válida
Ley de conservación del momentolineal para un sistema aislado
para sistemas aislados. Esta ley es considerada como una de las más importantesleyes de la mecánica. Obsérvese que no hemos dicho nada acerca de la naturalezade las fuerzas que actúan. El único requisito es que las fuerzas que actúan sobreel sistema tienen que ser internas. Por tanto, el momento lineal se conserva paraun sistema aislado independientemente de la naturaleza de las fuerzas internas,incluso aunque sean fuerzas no conservativas.
Actividad 4.2:
Describa con claridad qué significa fuerzas externas e internas al sis-tema. Aplique esta diferenciación al caso de dos partículas unidas porun muelle (inicialmente el muelle está estirado) que caen desde ciertaaltura.
¿Por qué decimos que las fuerzas internas siempre se producen entrepares de partículas?
¿Qué fuerzas (externas o internas) son las relevantes para determinarel movimiento del centro de masas del sistema? En el ejemplo anteriorde las dos partículas unidad por el muelle, ¿variará el movimiento delcentro de masas del sistema si el muelle hubiese estado inicialmentecomprimido en vez de estirado? ¿Y si las partículas no estuviesen uni-dad por un muelle sino sueltas?
¿Puede considerarse un sistema aislado el caso de dos bolas de billarque se mueven sin rozamiento apreciable en la mesa de billar? Razonesu respuesta.
Si las bolas del ejemplo anterior chocasen entre sí, ¿afectaría esto a laposición del centro de masas del sistema?
4.3.2. Impulso
La expresión del impulso para una partícula que vimos en (3.54) también pue-de extenderse a un sistema de partículas. En este caso consideramos que la fuerzaneta externa al sistema produce la siguiente variación en el momento lineal delsistema:
~Isis =∫ t f
t0
(∑~Fi ,ext)dt =∆~psis = ~psis, f −~psis,0 . (4.21)
1 Existen unos sistemas, que llamaremos sistemas aislados, en los que no existe fuerza neta externaactuando sobre cada una de las partículas, ~Fi ,ext = 0
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.3. Momento lineal de un sistema de partículas 109
El impulso representa una interacción entre el sistema y su entorno. Como re-sultado de esta interacción, el momento lineal del sistema varía. Por tanto, cuandodecimos que se proporciona un impulso a un sistema, estamos implicando que setransfiere un cierto momento lineal desde un agente externo hacia el sistema.
Cuando consideramos el impulso sobre una determinada partícula i del sis-tema de partículas tendremos que
~Ii =∫ t f
t0
~Fi dt =∆~pi = ~pi , f −~pi ,0 . (4.22)
Si ahora consideramos la descomposición de la fuerza total sobre la partícula i ensus componentes externa e interna tendremos que
∆~pi =∫ t f
t0
(~Fi ,ext +~Fi ,int)dt . (4.23)
En muchas situaciones físicas que implican “colisiones” haremos uso de ladenominada aproximación basada en el impulso, que consiste en suponer que
las fuerzas internas que actúan durante el breve instante de tiempoque dura la colisión son mucho mayores que cualquier fuerza externaque actúa sobre el sistema durante dicha colisión.
Así, por tanto, bajo esta aproximación podremos escribir que
∆~pi =∫ t f
t0
~Fi ,int dt . (4.24)
Este modelo simplificado nos permite ignorar los efectos de las fuerzas externaspara el cálculo de ∆~pi , dado que dichos efectos son irrelevantes durante el bre-ve instante en el que actúa la fuerza interna más significativa. Esta aproximaciónresulta especialmente útil para el cálculo de la variación del momento lineal decada partícula individual cuando se producen colisiones (la duración de la coli-sión es muy corta). Por ejemplo, cuando una pelota de béisbol es golpeada por unbate, la duración de la colisión es de aproximadamente 10 ms, y la fuerza mediaque el bate ejerce sobre la pelota (fuerza interna) durante ese mismo intervalo detiempo es normalmente de varios miles de newtons. Esta fuerza es mucho mayorque la fuerza gravitatoria sobre la pelota (fuerza externa), por lo que ignoramoscualquier variación de la velocidad relacionada con la fuerza gravitatoria durantela colisión.
Como resultado adicional muy importante tenemos que si las fuerzas externaspueden despreciarse respecto a las internas en el intervalo considerado, entoncesa la vista de (4.21) podemos concluir que, bajo la aproximación basada en el im-pulso, el impulso del sistema durante la colisión será aproximadamente nulo; esdecir,
~Isis =∫ t f
t0
(∑~Fi ,ext)dt =∆~psis = 0 . (4.25)
Actividad 4.3:
¿Por qué si las fuerzas internas no intervienen en el movimiento delcentro de masas, sí son relevantes en el movimiento de las partículasde un sistema cuando hay colisiones?
¿Por qué en una colisión se conserva el momento lineal del sistema?
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
110 Tema 4. Sistemas de partículas
4.4. Trabajo y Energía en un sistema de partículas
En nuestro sistema de N partículas procedemos a escribir para cada partículala segunda ley de Newton
mid~vi
dt= ~Fi (i = 1, . . . , N ) . (4.26)
Si multiplicamos ambos miembros de la anterior ecuación por un desplazamien-to infinitesimal d~ri obtenemos que
mid~vi
dt·d~ri = ~Fi ·d~ri . (4.27)
Si recordamos ahora la identidad (3.31), tenemos que el primer miembro de laanterior ecuación puede expresarse como
mid~vi
dt·d~ri = d
(1
2mi v2
i
)= dEc,i (4.28)
donde Ec,i corresponde a la energía cinética de la partícula i . La anterior expre-sión nos dice que (4.27) puede ser entonces reescrita como
~Fi ·d~ri = dEc,i (i = 1, . . . , N ) . (4.29)
Tras sumar la ecuación anterior para todas las partículas del sistema llegamos aque
N∑i=1
~Fi ·d~ri =N∑
i=1dEc,i = d
(N∑
i=1Ec,i
). (4.30)
Si ahora, al igual que hemos hecho en secciones anteriores, definimos la energíacinética del sistema como la suma de las energías cinéticas de cada una de laspartículas del sistema (prescindiremos de los índices en los sumatorios),
Ec,sis =∑
Ec,i =∑
12 mi v2
i , (4.31)
podremos reescribir la ecuación (4.30) como∑~Fi ·d~ri = dEc,sis . (4.32)
Si integramos la ecuación anterior desde un conjunto de posiciones iniciales [A]en cierto tiempo inicial t0 hasta hasta un conjunto de posiciones finales [B ] alcan-zado en el tiempo final t f tendremos que∫ [B ]
[A]
∑~Fi ·d~ri =
∫ t f
t0
dEc,sis (4.33)
=∆Ec,sis =∑ 1
2mi v2
i , f −∑ 1
2mi v2
i ,0 (4.34)
donde el segundo miembro de la anterior ecuación corresponde a la variación dela energía cinética del sistema entre los instantes t0 y t f .
En el primer miembro de (4.33) podemos descomponer la fuerza que actúasobre cada partícula en sus componentes “externa” e “interna”, lo que nos lleva-ría a ∫ [B ]
[A]
∑~Fi ·d~ri =
∫ [B ]
[A]
∑(~Fi ,ext +~Fi ,int
) ·d~ri (4.35)
=∫ [B ]
[A]
∑~Fi ,ext ·d~ri +
∫ [B ]
[A]
∑~Fi ,int ·d~ri . (4.36)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.4. Trabajo y Energía en un sistema de partículas 111
El primer término de (4.36) puede claramente identificarse con la suma de lostrabajos realizados por las fuerzas externas sobre cada una de las partículas y,en consecuencia, podemos denominarlo trabajo externo, Wext, sobre el sistema.El segundo término estará entonces relacionado con el trabajo realizado por lasfuerzas internas y será denominado como trabajo interno, Wint. Volviendo ahoraa la ecuación (4.33) observamos que ésta nos dice que
Wext +Wint =∆Ec,sis . (4.37)
Es interesante notar aquí que usualmente las fuerzas internas son de carácter con-servativo (fuerzas gravitatorias, eléctricas, recuperadoras, etc). En este caso co-mún, el trabajo interno puede relacionarse con la variación de la energía poten-cial interna del sistema, de forma análoga a como ya se hizo en el Apartado 3.6.4para el caso de una única partícula:∫ [B ]
[A]
∑~Fi ,int ·d~ri =−∆Ep,int . (4.38)
Esto nos permite reescribir finalmente (4.37) como
Wext =∆Ec,sis +∆Ep,int (4.39)
o, equivalentemente,
Wext =∆Upr (4.40)
donde la magnitud
Upr = Ec,sis +Ep,int (4.41)
se conoce como energía propia del sistema. La expresión (4.40) es el equivalenteen términos de energía de la interacción de un sistema con su exterior, que ya fueexpresado en términos de fuerzas en la expresión (4.18), y nos dice que
Energía propia de un sistema
la variación de la energía propia del sistema de partículas es igual altrabajo hecho sobre el sistema por las fuerzas externas.
Para el caso de sistemas aislados ya hemos mencionado que las fuerzas exter-nas son nulas. Ello implica que el trabajo externo será igualmente nulo y llegamosa lo que se conoce como principio de conservación de la energía:
En un sistema aislado, la energía propia del sistema permanece cons-tante en cualquier sistema de referencia inercial.
Volviendo al caso de sistemas no-aislados, cuando las fuerzas externas queactúan sobre el sistema también sean conservativas tendremos que el trabajo dedichas fuerzas externas puede escribirse como
Wext =−∆Ep,ext (4.42)
y, por tanto, la expresión (4.40) puede reescribirse en este caso como
∆Upr =−∆Ep,ext (4.43)
o, equivalentemente,
∆(Upr +Ep,ext) = 0 . (4.44)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
112 Tema 4. Sistemas de partículas
Esta última expresión nos dice que la magnitud conocida como energía totalde un sistema, E , sometido a fuerzas internas y externas de carácter conservativopermanece constante:
Conservación de la energía total deun sistema sometido a fuerzas
conservativas E =Upr +Ep,ext = Ec,sis +Ep,int +Ep,ext = const. (4.45)
Actividad 4.4:
Explique por qué las fuerzas internas no intervienen en la expresión(4.18) que determina la posición del centro de masas del sistema perosí lo hacen en (4.37) que determina la energía cinética del sistema. [Serecomienda hacer las operaciones con un sistema de dos partículas]
Exprese con sus propias palabras y con detalle el significado de la ex-presión Wext =∆Upr y cuál es su implicación más relevante para el casode sistemas aislados.
Explique por qué la expresión ∆(Upr +Ep,ext) = 0 no sería válida si in-terviniesen fuerzas no conservativas en el sistema.
4.4.1. Energía cinética asociada al centro de masas
Es interesante notar que, si expresamos v2i =~vi ·~vi y consideramos la descom-
posición dada en (4.6), tenemos que
v2i = (~vcm +~v∗
i ) · (~vcm +~v∗i ) = v2
cm + (v∗i )2 +2~vcm ·~v∗
i
lo que nos permite reescribir (4.31) como
Ec,sis =∑
12 mi v2
cm +∑12 mi (v∗
i )2 +∑12 mi 2~vcm ·~v∗
i . (4.46)
El tercer término en la expresión anterior puede a su vez reescribirse como
∑mi~vcm ·~v∗
i =~vcm ·∑mi~v∗i = 0
que es idénticamente nulo debido a que∑
mi~v∗i = 0 según lo discutido en relación
con la expresión (4.10). En consecuencia obtenemos que la energía cinética delsistema puede finalmente expresarse como
Ec,sis =∑
12 mi v2
cm +∑12 mi (v∗
i )2
= 12 M v2
cm +∑E∗
c,i (4.47)
donde el primer término representa la energía cinética de una partícula de ma-sa M situada en el centro de masas del sistema (energía cinética orbital) y el se-gundo término,
∑E∗
c,i , representa la suma de las energías cinéticas de las partícu-las cuando su velocidad se toma con referencia en el centro de masas del sistema.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.4. Trabajo y Energía en un sistema de partículas 113
Actividad 4.5:
La expresión Ec,sis = 12 M v2
cm +∑E∗
c,i es válida solo para sistemas enlos que actúan fuerzas conservativas. ¿Verdadero o Falso? Razone surespuesta.
¿Existe alguna situación en la que∑
E∗c,i sea idénticamente nulo? Des-
críbala.
¿Se le ocurre alguna razón por la que el término 12 M v2
cm es denomina-do “energía cinética orbital”?
4.4.2. Energía interna de un sistema de partículas
En la expresión (4.47) aparece un término de energía cinética referido al sis-tema de referencia centro de masa que se conoce como energía cinética internadel sistema,
Ec,int =∑
12 mi (v∗
i )2 =∑E∗
c,i . (4.48)
Si a esta energía cinética interna le sumamos el término de energía potencial in-terna definido en (4.38) obtenemos una nueva magnitud conocida como energíainterna del sistema:
Energía interna de un sistemaUint = Ec,int +Ep,int . (4.49)
Si notamos ahora que la energía propia del sistema en (4.41) puede escribirse,usando (4.47) y (4.49), como
Upr =Uint + 12 M v2
cm (4.50)
tendremos que la expresión (4.40) también puede expresarse como
Wext =∆Uint +∆( 1
2 M v2cm
). (4.51)
Esta expresión nos indica que el trabajo de las fuerzas externas se emplea paramodificar la energía interna del sistema y la energía cinética del movimiento or-bital del centro de masas.
La expresión (4.51) puede aplicarse a una serie de casos particulares de espe-cial interés para obtener unas expresiones muy útiles en dichos casos. Así distin-guiremos las siguientes situaciones:
La resultante de la suma de las fuerzas externas es nula.Este caso fue contemplado anteriormente y nos llevó a la expresión (4.19), quenos decía que el momento lineal del sistema era constante bajo estas circuns-tancias. Esto implica necesariamente que ∆vcm = 0 y, por tanto, partiendo de(4.51) llegamos igualmente a que
Wext =∆Uint . (4.52)
La resultante de la suma de las fuerzas externas así como el trabajo de estasfuerzas son nulos.Esta situación corresponde a un sistema aislado y podemos concluir que
Conservación de la energía interna deun sistema aislado∆Uint = 0 (4.53)
que expresa la conservación de la energía interna de un sistema aislado.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
114 Tema 4. Sistemas de partículas
La energía interna del sistema no cambia durante el movimiento.Este caso corresponde, por ejemplo, a lo que ocurre en el movimiento sin ro-tación de un cuerpo rígido. En esta situación encontramos entonces que
Wext =∆( 1
2 M v2cm
)(4.54)
es decir, el trabajo externo sería responsable del cambio de la energía cinéticaorbital. La anterior expresión también nos justifica el hecho de haber tratadoa veces en el Tema 3 el movimiento de traslación de cuerpos sólidos rígidoscomo si fuesen partículas puntuales.
Es costumbre escribir la energía interna del sistema sin el subíndice “int”, demodo que a partir de este momento denotaremos la energía interna del sistema
U ≡Uint simplemente como U .
Actividad 4.6:
Describa con detalle ejemplos sencillos y prácticos donde se verifi-quen las siguientes expresiones: (a) Wext = ∆Uint, (b) ∆Uint = 0, y(c) Wext =∆
( 12 M v2
cm
).
4.5. Colisiones
En esta sección, vamos a utilizar la ley de conservación del momento linealpara describir lo que ocurre cuando colisionan dos objetos.
Como ya hemos mencionado, una colisión es básicamente fruto de la inter-acción de fuerzas internas durante un periodo de tiempo muy corto. Dado quelas fuerzas externas serán entonces poco significativas (aproximación basada enel impulso) y actúan durante un periodo de tiempo muy corto, el impulso del sis-tema durante la colisión [ver Eq. (4.25)] puede considerarse nulo:
~Isis =∆~psis = 0 . (4.55)
Este hecho implica entonces que el momento lineal del sistema se conserva du-rante la colisión; es decir,
~psis(antes de la colisión) = ~psis(después de la colisión) . (4.56)
Bajo esta misma aproximación podemos igualmente suponer que el trabajo delas fuerzas externas sobre el sistema durante la colisión es despreciable. Por tanto,según (4.40), encontramos que la energía propia del sistema también se conserva:
Upr(antes de la colisión) =Upr(después de la colisión) . (4.57)
La aplicación de las anteriores condiciones de conservación del momento li-neal y la energía propia del sistema nos permitirá la resolución de algunos proble-mas de colisiones en los que nuestro objetivo general será relacionar las condicio-nes finales del sistema con las condiciones iniciales. Una colisión puede ser el re-sultado del contacto físico entre dos objetos, como se ilustra en la figura (a). Estasituación resulta habitual cuando se trata de dos objetos macroscópicos, tales co-mo dos bolas de billar o una pelota de béisbol y un bate. Sin embargo, el conceptode colisión debe generalizarse, ya que en el nivel microscópico no está suficiente-mente claro qué significa la noción de “contacto”. Para comprender la diferencia
Apuntes de Física 1 JCM,FLML
CopiaUso
Académico
4.5. Colisiones 115
entre las colisiones macroscópicas y microscópicas, consideremos la colisión deun protón con una partícula alfa (el núcleo de un átomo de helio), que se ilustraen la figura (b). Dado que las dos partículas tienen carga positiva, se repelen entresí. Se ha producido una colisión pero las partículas que han colisionado no hanllegado nunca a estar en “contacto”.
De acuerdo con (4.57), la energía propia del sistema se conserva durante lacolisión, lo que quiere decir que la variación de la energía cinética del sistemacoincidirá con menos la variación de la energía potencial interna del mismo:
∆Ec,sis =−∆Ep,int . (4.58)
En función de si existe o no variación de la energía potencial interna del sistematendremos que la energía cinética del sistema se conserva o no durante la colisión.Definimos entonces
colisión inelástica como aquella en la que energía cinética del sistema NO seconserva (el momento lineal hemos supuesto que siempre se conserva).
La colisión de una pelota rugosa con una superficie dura es inelástica, ya queparte de la energía cinética de la pelota se transforma en energía potencial inter-na cuando la pelota se deforma mientras que está en contacto con la superficie.Cuando dos objetos colisionan y quedan unidos después de la colisión se produceuna transferencia máxima de energía cinética inicial a energía potencial interna.Decimos entonces que la colisión es completamente inelástica. Por ejemplo, sidos vehículos colisionan y quedan unidos, se mueven con una cierta velocidadcomún después de una colisión completamente inelástica. Si un meteorito coli-siona con la Tierra y queda completamente sepultado en el suelo, la colisión escompletamente inelástica.
colisión elástica como aquella en la que la energía cinética del sistema se con-serva así como el momento lineal.
Las colisiones reales en el mundo macroscópico, tales como las que se producenentre las bolas de billar, son sólo aproximadamente elásticas, ya que parte de laenergía cinética se transformará en algún otro tipo de energía. No obstante, enel mundo microscópico sí existen colisiones realmente elásticas entre partículasatómicas y subatómicas. Las colisiones elásticas y completamente inelásticas soncasos límite. La inmensa mayoría de las colisiones caen dentro del rango com-prendido entre estos dos límites.
Actividad 4.7:
Describa las condiciones que deberían darse para que en una colisiónno se conservase el momento lineal del sistema.
Razone si las siguientes afirmaciones son verdaderas o falsas:
• En una colisión elástica solo actúan fuerzas conservativas.
• En una colisión inelástica, parte de la energía cinética del sistemase transforma en calor.
• En una colisión completamente inelástica, al haber deformación,las fuerzas que actúan deben ser de rozamiento.
• Hay colisiones que no son elásticas ni completamente inelásticas.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
116 Tema 4. Sistemas de partículas
Colisiones completamente inelásticas en una dimensión
Consideremos dos objetos de masa m1 y m2 que se mueven con velocidadescuyas componentes iniciales son v1i y v2i a lo largo de una línea recta (habría queconsiderar cada componente con su signo oportuno), como se ilustra en la figura.Si los dos objetos colisionan de frente y quedan unidos, se moverán con una velo-
Antes de la colisión
(a)
Después de la colisión
(b)
cidad común v f después de la colisión: la colisión es completamente inelástica.Dado que el momento lineal total del sistema aislado formado por los dos objetosantes de la colisión es igual al momento lineal total del sistema formado por losobjetos combinados después de la colisión,
m1v1i +m2v2i = (m1 +m2)v f ⇒ v f =m1v1i +m2v2i
m1 +m2(4.59)
Por tanto, como conocemos las componentes iniciales de la velocidad de los dosobjetos, podemos utilizar esta sencilla ecuación para determinar la componentefinal común de la velocidad.
Colisiones elásticas en una dimensión
Consideremos ahora dos objetos que chocan frontalmente en una dimensión,con una colisión elástica (ver figura). En este tipo de colisión, tanto el momentolineal como la energía cinética se conservan. Por tanto, podemos escribir
m1v1i +m2v2i = m1v1 f +m2v2 f (4.60)
1
2m1v2
1i +1
2m2v2
2i =1
2m1v2
1 f +1
2m2v2
2 f . (4.61)
En un problema típico de colisiones elásticas, aparecen dos magnitudes desco-
Antes de la colisión
(a)
Después de la colisión
(b)nocidas, y las ecuaciones anteriores nos permiten calcular ambas, sin más queresolver el sistema de ecuaciones no lineales.
Nota: Existe otro método alternativo, que implica ciertas manipulaciones matemáticas dela ecuación (4.61), que a menudo simplifica este proceso. En primer lugar, si se cancela enfactor 1/2 de la ecuación (4.61) y se separan los términos que contienen m1 y m2 en cadauno de los miembros de la ecuación, podemos escribirla del siguiente modo:
m1(v21i − v2
1 f ) = m2(v22i − v2
2 f )
A continuación, descomponemos en factores ambos miembros de la ecuación:
m1(v1i − v1 f )(v1i + v1 f ) = m2(v2i − v2 f )(v2i + v2 f ) (4.62)
Si ahora separamos los términos que contienen m1 y m2 en la ecuación de la cantidad demovimiento (4.60), obtenemos
m1(v1i − v1 f ) = m2(v2i − v2 f ) (4.63)
Para obtener el resultado final, dividimos la ecuación (4.62) entre la ecuación (4.63) y re-sulta
v1i + v1 f = v2i + v2 f
o, agrupando en cada miembro de la ecuación los valores iniciales y finales,
v1i − v2i =−(v1 f − v2 f ) . (4.64)
Esta ecuación, junto con la ecuación de conservación de la cantidad de movimiento (4.60),se puede utilizar para resolver problemas que impliquen colisiones elásticas en una dimen-sión entre dos objetos cualesquiera. De acuerdo con la ecuación (4.64), la velocidad relativa
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.5. Colisiones 117
v1i −v2i de los dos objetos antes de la colisión es igual a la velocidad relativa después de lacolisión, pero con signo opuesto, −(v1 f − v2 f ).
Supongamos que las masas y las componentes iniciales de la velocidad de ambos ob-jetos son conocidas. Las ecuaciones (4.60) y (4.64) pueden proporcionar las componentesfinales de la velocidad en función de los valores iniciales, ya que tenemos dos ecuaciones ydos incógnitas:
v1 f =(
m1 −m2
m1 +m2
)v1i +
(2m2
m1 +m2
)v2i
v2 f =(
2m1
m1 +m2
)v1i −
(m1 −m2
m1 +m2
)v2i .
EJEMPLO 4.1 Choque elástico en dos dimensiones.
Un disco de hockey B descansa sobre una superficie de hielo liso y es golpeado por otrodisco A de la misma masa. El disco A viaja inicialmete a una velocidad v0 en la direc-ción x y es desviado un ánguloα con respecto a su dirección original. Suponiendo que elchoque es perfectamente elástico, calcule la velocidad final de cada disco y la direcciónβde la velocidad de B después del choque.
En la colisión usamos el hecho de que el momento lineal del sistema se conserva, esdecir,
~pi = ~p f
que puede reescribirse como
Antes de la colisión
Después de la colisión
mA~v A,i +mB~vB ,i = mA~v A, f +mB~vB , f .
En el presente caso, dado que mA = mB y ~vB ,i = 0, la anterior expresión se reduce a
~v A,i =~v A, f +~vB , f . (4.65)
Por otra parte, al ser el choque elástico, también tenemos que se conserva la energía ciné-tica del sistema, ∆Ec = 0.
Según nos dice el enunciado del problema ~v A,i = v0x y ~v A, f = v A cosαx+ v A senαy,~vB , f = vB cosβx+ vB senβy, por lo que la expresión (4.65) junto con la condición de con-servación de la energía cinética nos lleva al siguiente sistema de ecuaciones:
v0 = v A cosα+ vB cosβ (4.66)
0 = v A senα+ vB senβ (4.67)
v20 = v2
A + v2B . (4.68)
Para resolverlo, elevamos al cuadrado (4.66) y (4.67),
v20 = v2
A cos2α+ v2B cos2β+2v A vB cosαcosβ (4.69)
0 = v2A sen2α+ v2
B sen2β+2v A vB senαsenβ (4.70)
y sumamos (4.69) junto con (4.70) para obtener
v20 = v2
A + v2B +2v A vB
[cosαcosβ+ senαsenβ
](4.71)
= v2A + v2
B +2v A vB cos(α−β) . (4.72)
Si tenemos ahora en cuenta (4.68) en (4.72) llegamos a que
cos(α−β) = 0 (4.73)
o, equivalentemente, a la siguiente condición:
α−β=π/2 =⇒ β=α−π/2 . (4.74)
Por otra parte, de la ecuación (4.67) tenemos que
vB senβ=−v A senα =⇒ vB =−v Asenα
sen(α−π/2)= v A tanα . (4.75)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
118 Tema 4. Sistemas de partículas
Al sustituir esta expresión en (4.68) obtenemos que
v20 = v2
A(1+ tan2α) = v2A sec2α (4.76)
de donde deducimos finalmente que
v A = v0 cosα (4.77)
vB = v0 senα . (4.78)
4.6. Momento angular de un sistema de partículas
En el Apartado 3.8 se definió el momento angular para una partícula con res-pecto a cierto sistema de referencia, además de su relación con el momento de lafuerza neta que actuaba sobre ella. A continuación extenderemos este análisis alcaso de un sistema de partículas. Para ello, empezaremos definiendo el momentoangular de un sistema de partículas, ~Lsis, con respecto a un sistema de referen-cia dado como la superposición de los momentos angulares de cada una de laspartículas del sistema:
~Lsis =∑
i
~Li =∑
i~ri ×mi~vi . (4.79)
En la Eq. (3.59) obtuvimos que la derivada temporal del momento angular de unapartícula era igual al momento de la fuerza neta que actuaba sobre ella. Veamosa continuación la extensión de esta igualdad al caso de un sistema de partículas.Pare ello derivemos con respecto al tiempo la expresión (4.79):
d~Lsis
dt=∑
i
d~Li
dt=∑
i~ri × d~pi
dt. (4.80)
Considerando las ecuaciones (3.53) y (4.14), (4.80) puede reescribirse como
d~Lsis
dt=∑
i~ri × d~pi
dt=∑
i~ri ×~Fi =
∑i~ri ×
(~Fi ,ext +~Fi ,int
). (4.81)
El último término de la anterior expresión puede expresarse en función de lasfuerzas internas entre pares de partículas ~fi j (recordemos que ~f j i =−~fi j ):
∑i~ri ×~Fi ,int =
∑i~ri ×
∑j 6=i
~fi j =∑
i
∑j 6=i~ri ×~fi j =
∑i
∑j 6=ij>i
(~ri −~r j )×~fi j .
Observamos la aparición de términos del tipo (~ri −~r j )× ~fi j , que serán idéntica-
mente nulos cuando (~ri −~r j ) sea paralelo a ~fi j . Afortunadamente ésta es una si-tuación muy frecuentemente encontrada en la práctica (por ejemplo cuando lasfuerzas internas son centrales) y que nosotros supondremos que se cumple siem-Supondremos que (~ri −~r j )×~fi j = 0pre en nuestros casos de estudio. En consecuencia tendremos que (~ri −~r j )×~fi j = 0y, por tanto, nos encontramos con que el término que involucra a las fuerzas in-ternas,
∑i~ri ×~Fi ,int, es idénticamente nulo.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.6. Momento angular de un sistema de partículas 119
La suposición anterior nos permite escribir finalmente que
d~Lsis
dt=∑
i~ri ×~Fi ,ext =
∑i~τi ,ext ≡~τext (4.82)
donde hemos usado la definición del momento de una fuerza con respecto a cier-
Ecuación fundamental de la dinámicade rotación de un sistema de partícu-las
to sistema de referencia dada por [ver (3.57)]
~τ=~r ×~F . (4.83)
La expresión (4.82) nos dice entonces que la variación temporal del momento an-gular del sistema depende únicamente del momento neto de las fuerzas externasdel sistema. Este hecho es muy relevante puesto que nos permite relacionar elcomportamiento del sistema completo con la acción de las fuerzas externas, queson las que usualmente conocemos y podemos controlar. En particular, si tene-mos que ~τext es nulo encontramos que el momento angular del sistema se con-servaría, lo cual es muy conveniente a la hora de entender y resolver muchas si-tuaciones.
Actividad 4.8:
Si ya obtuvimos la expresión (4.18) que nos daba el comportamientodel momento lineal de un sistema de partículas, ¿por qué es impor-tante tener también la expresión (4.82) para el comportamiento de sumomento angular? [Relacione esto con el hecho de que podemos teneruna fuerza neta externa nula sobre el sistema pero sin embargo tenermovimiento de rotación.]
Si queremos que un sistema de partículas esté en reposo, ¿qué condi-ciones debemos imponer?
Describa alguna situación física en la que~τext sea idénticamente nulo.
Describa alguna situación física en la que solo una de las componen-tes del vector~τext sea idénticamente nulo. ¿Qué consecuencias físicasimportantes obtendría del hecho anterior?
Expresión en términos del centro de masa
Si consideramos ahora el término que nos da el momento neto de las fuer-zas externas cuando expresamos la posición de cada partícula en función de laposición de su centro de masas, encontramos que
~τext =∑(
~rcm +~r∗i
)×~Fi ,ext
=~rcm ×∑~Fi ,ext +
∑~r∗
i ×~Fi ,ext
=~rcm ×~Fext +~τ∗ext (4.84)
donde el último término ~τ∗ext =∑~r∗
i ×~Fi ,ext representa el momento neto de lasfuerzas externas con respecto al sistema de referencia centro de masa (indicadomediante el superíndice ∗).
Por otra parte tenemos que el momento angular del sistema puede escribirsecomo
~Lsis =∑(
~rcm +~r∗i
)×mi(~vcm +~v∗
i
)=∑
~rcm ×mi~vcm +∑~rcm ×mi~v
∗i +∑
~r∗i ×mi~vcm +∑
~r∗i ×mi~v
∗i . (4.85)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
120 Tema 4. Sistemas de partículas
Teniendo ahora en cuenta que tanto el segundo como el tercer término del segun-do miembro de la expresión anterior son nulos [según (4.9) y (4.10)], vemos quepodemos escribir
~Lsis =~rcm ×M~vcm +∑~r∗
i ×mi~v∗i
= ~Lcm + ~L∗sis (4.86)
donde~Lcm =~rcm ×~pcm representa el momento angular de una partícula de masaM en la posición del centro de masas del sistema y~L∗
sis =∑~r∗
i ×mi~v∗i representa
el momento angular del sistema tomando las posiciones y las velocidades desdeel sistema de referencia centro de masa. Si derivamos la expresión anterior conrespecto al tiempo encontramos finalmente que
d~Lsis
dt= d~Lcm
dt+ d~L∗
sis
dt
= d~rcm
dt×~pcm +~rcm × d~pcm
dt+ d~L∗
sis
dt
= 0 +~rcm ×~Fext + d~L∗sis
dt. (4.87)
Si consideramos la ecuación (4.82) junto con las expresiones (4.84) y (4.87)vemos entonces que podemos identificar las siguientes igualdades:
d~Lcm
dt=~rcm ×~Fext (4.88)
d~L∗sis
dt=~τ∗ext . (4.89)
Estas expresiones nos permiten relacionar el momento angular del centro de ma-sas con el momento neto de las fueras externas y el momento angular del sistemareferido al centro de masas con el momento neto de las fuerzas externas toma-das desde este mismo sistema de referencia. En particular, es importante notarque esta última ecuación (4.89) es válida incluso si el c.d.m. se desplaza con unmovimiento curvilíneo y/o acelerado (sistema no inercial). De este modo, estaecuación junto con (4.18) nos serán muy útiles para estudiar el caso general delmovimiento de un sistema de partículas que se traslada y que rota con respectoa su centro de masas (por ejemplo, el caso de una rueda cayendo por un planoinclinado).
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.7. Sólido rígido con un eje principal de giro 121
Actividad 4.9:
A la vista de las anteriores derivaciones, ¿tienen las fuerzas internasalguna relevancia en el comportamiento global del sistema? ¿Y en elcomportamiento detallado de cada una de las partículas del sistema?
Si el centro de masas de un sistema de partículas está en reposo, ¿quétipo de movimiento pueden tener las partículas de dicho sistema? Des-criba un ejemplo sencillo. ¿Cuál sería la ecuación fundamental que nosdetermina el movimiento de las partículas en esta situación? ¿Existe eneste caso alguna ventaja en usar la ecuación (4.89) respecto a (4.82)?
Si el centro de masas de un sistema de partículas se traslada acelerán-dose, ¿qué tipo de movimiento pueden tener las partículas de dichosistema? Describa un ejemplo sencillo. ¿Cuáles serían las ecuacionesfundamentales que nos determinan el movimiento de las partículasen esta situación? ¿Existe alguna ventaja en usar la ecuación (4.89) res-pecto a (4.82)?
4.7. Sólido rígido con un eje principal de giro
Un sólido rígido es un sistema de partículas que forma un continuo materialque no se deforma. En general, el movimiento más frecuente que realiza un cuer-po rígido puede considerarse como la combinación de una traslación de su centrode masas [regido por la ecuación (4.18)] y la rotación en torno a su c.d.m. [regidopor la ecuación (4.89)]. Este hecho nos simplifica enormemente el estudio de ladinámica de un cuerpo rígido pues su c.d.m. se mueve como una sola partícula y,por tanto, se puede analizar siguiendo los procedimientos expuestos en el Tema 3.En cuanto a su movimiento de rotación, el estudio de éste es en general bastantecomplicado. Por ello, en este apartado, nos centraremos primero en el caso parti-cular de un sólido rígido que rota alrededor de un eje que pasa por un punto fijoen un sistema de referencia inercial. En este caso usaremos directamente la ecua-ción fundamental de la dinámica de la rotación de un sistema de partículas dadaen (4.82). Posteriormente, trataremos en el Apartado 4.8 la rotación de un cuerporígido alrededor de un eje que pasa a través de su centro de masa que puede estartrasladándose de forma arbitraria.
4.7.1. Momento de una fuerza respecto a un eje de giro fijo
Cuando se ejerce una fuerza sobre un cuerpo que puede girar alrededor decierto eje gracias a un pivote, distinguiremos dos características de la fuerza apli-cada: su punto de aplicación y la línea de acción de la fuerza.2 Esta última serála línea que pasa por el punto de aplicación de la fuerza y que contiene a dichafuerza. Si esta línea de acción no pasa a través del pivote, el cuerpo tiende a giraralrededor del eje impuesto. Por ejemplo, cuando se empuja una puerta, la puertagira alrededor del eje que pasa por sus bisagras. Para que se produzca la rotación,
2 Debemos notar aquí que el vector que representa la fuerza aplicada no tiene “punto de aplicación”o “punto inicial”, tal y como ya discutimos en la Actividad del Apartado 1.8. No obstante, la fuerzafísicamente sí puede aplicarse en un punto específico del sólido rígido, y este hecho es el relevanteen esta discusión. Matemáticamente, la existencia de este “punto de aplicación” está consideradaen el vector~r .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
122 Tema 4. Sistemas de partículas
es necesario realmente que actúe un momento dinámico (momento de la fuerza),el cuál puede siempre visualizarse como la acción de un par de fuerzas (concep-to que se define como un conjunto de dos fuerzas de igual módulo cuyas líneasde acción no coinciden). En el caso de la puerta que gira, aparece una fuerza adi-cional en la puerta aplicada en las bisagras. Ambas fuerzas son responsables dela rotación de la puerta así como del movimiento de traslación de su centro demasas. Si la línea de acción de las fuerzas fuera la misma, se podría producir unadeformación del cuerpo, pero nunca una rotación.
La tendencia de una fuerza a hacer que un cuerpo gire alrededor de un ejela determina cuantitativamente el momento de la fuerza [ver Ec. (4.83)]. Dichomomento es la causa de los cambios producidos en el movimiento de rotación, yjuega un papel en la dinámica de rotación análogo al papel que las fuerzas jueganen la dinámica de la partícula, donde las fuerzas son la causa de los cambios enel movimiento de traslación. Supongamos un martillo que puede girar alrededorde un eje que pasa por O, tal como muestra la figura. La fuerza aplicada ~F puede
O
d
actuar, de forma general, formando un ángulo θ con respecto al vector de posición~r que indica el punto de aplicación de la fuerza.
A partir de la expresión del momento~τ resultante de la fuerza ~F encontramosque su módulo viene dado por
τ= r F senθ . (4.90)
Es muy importante tener en cuenta que el momento de la fuerza sólo queda de-finido cuando se especifica un eje de referencia, a partir del cual se determina elvector~r .
Podemos interpretar la expresión (4.90) de dos formas diferentes:
1. Si nos fijamos en las componentes de la fuerza en la figura, vemos que la com-ponente Fn = F cosφ, paralela a~r , no contribuirá al giro alrededor del puntode pivote porque su línea de acción pasa justamente a través del punto del pi-vote (una puerta no se puede abrir empujando las bisagras). Por lo tanto, solola componente tangencial provoca un giro alrededor del pivote. En este caso,podemos escribir
τ= r (F senφ) = r Ft (4.91)
de modo que el momento es el producto de la distancia al punto de aplicaciónde la fuerza y la componente tangencial de esta (Ft = F senφ).
2. La forma alternativa de interpretar la expresión (4.90) consiste en asociar lafunción seno a la distancia r , de modo que
τ= F (r senφ) ≡ F d (4.92)
donde la magnitud d = r senφ se denomina como brazo de palanca de la fuer-za ~F y representa la distancia más corta entre el eje de rotación y la línea deacción de ~F (esta distancia se mide en la perpendicular de la línea de acción).
De la definición del momento de la fuerza (4.92), podemos deducir que la ten-dencia a producir un giro aumenta al hacerlo F y d . Por ejemplo, podemos con-seguir que una puerta gire con más facilidad si empujamos con más fuerza o biensi empujamos desde un punto cercano al picaporte en lugar de hacerlo desde unpunto cercano a las bisagras. No debe confundirse el momento de la fuerza conla propia fuerza. El momento ciertamente depende de la fuerza, pero también dedónde se aplica ésta.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.7. Sólido rígido con un eje principal de giro 123
Para clarificar la naturaleza vectorial del momento de la fuerza supongamosuna fuerza ~F que actúa sobre una partícula con vector de posición~r . El módulodel momento debido a esta fuerza respecto a un eje que pasa a través del origenes |r F senφ|, donde φ es el ángulo que forman~r y ~F . El eje alrededor del cual ~Ftenderá a producir un giro es perpendicular al plano que forman~r y ~F . Si la fuerzase sitúa en el plano x y , como en la figura, el momento se representa medianteun vector ~τ paralelo al eje z y cuyo sentido es el mismo que el vector velocidadangular ~ω. La fuerza de la figura ejerce un momento que tiende a hacer que elcuerpo gire en sentido antihorario, por lo que ~τ está orientado en la direcciónpositiva del eje z. Si invertimos el sentido de ~F ,~τ estará ciertamente orientado enla dirección negativa del eje z.
Si dos o más fuerzas actúan sobre un cuerpo, como muestra la figura, cadauna de ellas tiene una cierta tendencia a producir un movimiento de rotación al-rededor de un punto de pivote O. Por ejemplo, si el cuerpo está inicialmente enreposo, ~F2 tiende a hacer girar el cuerpo en sentido horario mientras que ~F1 tien-de a hacerlo en sentido antihorario. Utilizaremos el convenio de que el signo delmomento resultante de una fuerza es positivo si tiende a provocar un giro alre-dedor del eje en sentido antihorario y que el signo es negativo si la tendencia delgiro es en sentido horario. Por ejemplo, en la figura, el momento resultante de ~F1,que tiene un brazo de palanca d1, es positivo e igual a +F1d1; mientras que el mo-mento resultante de ~F2 es negativo e igual a −F2d2. Por tanto, el momento netoque actúa sobre el cuerpo con respecto al eje que pasa por O es
¡Cuidado con el convenio de signos!
τneto = τ1 +τ2 = F1d1 −F2d2 .
Momento de la fuerza de gravedad
Cuando una de las fuerzas externas que actúa sobre el sólido es la gravedad,el momento que dicha fuerza de gravedad ejerce sobre el sólido rígido,~τg , puede
escribirse a partir de (4.84), considerando que ~Fi = mi~g , como
~τg =~rcm ×∑mi~g +∑
~r∗i ×mi~g
=~rcm ×M~g + (∑mi~r
∗i
)×~g . (4.93)
En la expresión anterior podemos observar que el segundo témino es nulo debidoa la identidad (4.9). Por consiguiente encontramos que
~τg =~rcm ×M~g . (4.94)
Esta expresión nos dice que el momento de la fuerza de gravedad puede conside-
Momento externo de la fuerzagravitoria
rarse que proviene del peso total del sólido rígido aplicado justamente en el centrode masas del mismo. Si elegimos como sistema de referencia el propio c.d.m., en-tonces tenemos que el momento de la fuerza de gravedad será nulo.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
124 Tema 4. Sistemas de partículas
Actividad 4.10:
¿Qué ocurre si la línea de acción de fuerza aplicada pasa por el eje degiro del sólido rígido?
Describa las diferentes posibilidades que tendría para aumentar la ro-tación de un sólido alrededor de un eje.
Utilice el convenio de signos del momento de la fuerza anteriormentemencionado para explicar por qué gira un volante si aplicamos fuerzascon igual módulo en distintos sentidos en sus extremos y no gira siestas fuerzas se aplican en el mismo sentido.
Compruebe que el momento de un par de fuerzas respecto a un ejede rotación que atraviese el SR siempre es equivalente al momento deuna sola fuerza (y viceversa).
Utilice la expresión (4.94) para deducir que podemos calcular la posi-ción del centro de masas de una figura plana de geometría arbitrariacolgándola de dos puntos distintos de la misma y esperando a que al-cance su posición de equilibrio. [Ayuda: el c.d.m. estará en el puntodonde se cruzan las dos líneas de acción del peso.]
4.7.2. Momento angular en la dirección del eje de giro
Si suponemos que un sólido rígido gira en torno a cierto eje (cuya orientaciónla tomamos coincidente con la del eje z) con una velocidad angular~ω=ωz, obser-
Eje de giro
vamos que cada una de las partículas del sistema realiza un movimiento circularen torno al eje de giro. El vector velocidad de cada partícula puede, por tanto, ex-presarse como
~vi =~ω×~ri (4.95)
cuyo módulo viene dado porvi =ωdi (4.96)
donde di = |z×~ri | es la distancia mínima desde la partícula al eje de giro. Consi-derando la cinemática del movimiento circular (ver Apartado 2.5), siendo la ace-leración angular α= ω, tenemos que
aτ,i =αdi (4.97)
an,i =v2
i
di=ω2di . (4.98)
Para encontrar la componente del momento angular del sólido rígido (SR) a lolargo de la dirección del eje de giro, partimos de la expresión del momento angularpara el sólido,
~LSR =∑mi~ri ×~vi (4.99)
y expresamos~ri = ~di + zi z
siendo zi z la componente z de~ri . Al introducir esta expresión en (4.99) obtene-mos
~LSR =∑mi
(~di + zi z
)×~vi =
∑mi
~di ×~vi +∑
mi zi z×~vi (4.100)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.7. Sólido rígido con un eje principal de giro 125
donde observamos que el primer término,∑
mi~di ×~vi , está dirigido a lo largo del
eje de giro (z) mientras que el segundo término no tiene componentes en esta di-rección. Por tanto, la componente z del momento angular puede expresarse como
Lz =∣∣∣∑mi
~di ×~vi
∣∣∣=∑mi di vi =
(∑mi d 2
i
)ω (4.101)
o equivalentemente3
Lz = Iω (4.102)
donde
I =∑mi d 2
i (4.103)
es el llamado momento de inercia del sólido rígido respecto al eje de giro dado.
Momento de inercia de un solido
Esta magnitud veremos que representa la “inercia” del sólido rígido a cambiar sumovimiento de rotación.
En el caso de que consideremos el carácter continuo del sólido rígido debemostener en cuenta que la expresión (4.103) debe sustituirse por
I =∫
SRρ2dm (4.104)
donde ρ expresa la distancia al eje de giro.
Es importante que notemos que el momento de inercia no es una magnitudintrínseca del sólido rígido (como sí lo sería su masa total) sino que depende deleje de giro que se tome como referencia. Así, un sólido rígido cualquiera tendrádistintos momentos de inercia según a qué ejes sean referidos. Algunos ejemplosde momentos de inercia de distintos cuerpos sólidos se muestran en la Fig. 4.1.
Si conocemos el valor del momento de inercia respecto a un eje de giro quepase por el centro de masa del sólido rígido, en cuyo caso lo denominaremos
I∗ =∑mi (d∗
i )2 (4.105)
y queremos encontrar el momento de inercia respecto a un eje paralelo al anterior(que denominaremos I0), podemos proceder de la siguiente forma:
I0 =∑
mi d 2i =∑
mi |~di |2 =∑
mi |~dcm + ~d∗i |2 =
∑mi
[d 2
cm + (d∗i )2 +2~dcm · ~d∗
i
]donde dcm es la distancia entre los ejes de giro paralelos considerados y ademásdebemos considerar que
∑mi
~d∗i = 0 según nos dice la identidad (4.9). Por tanto,
tenemos que
I0 = Md 2cm + I∗ . (4.106)
Esta expresión es precisamente la que nos permite obtener de forma fácil el va-lor del momento de inercia de la tercera situación mostrada en la primera fila deFig. 4.1 a partir del valor de la segunda (que se refiere a un varilla cuyo eje de giropasa por el centro de masa).
3 Es interesante notar que todo sólido rígido tiene al menos tres ejes de giro, denominados ejes prin-ciaples, a lo largo de los cuales el momento angular es paralelo a la dirección del eje giro; es decir,se cumple que~L = I~ω. No obstante, la expresión (4.102) es válida aunque la dirección z no coincidacon uno de estos ejes principales.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
126 Tema 4. Sistemas de partículas
FIGURA 4.1: Momentos de inercia de distintos cuerpos sólidos.
Actividad 4.11:
El movimiento de todas las partículas de un SR que gira en torno a uneje responde a un movimiento circular con la misma velocidad angu-lar. ¿Verdadero o Falso? Razone su respuesta.
En la expresión (4.102), Iω representa: (a) el módulo del momento an-gular del SR, (b) una componente del momento angular, (c) el momen-to angular, (d) ninguna de las anteriores. Razone su respuesta.
Explique qué quiere decir que el momento de inercia de un SR no esuna propiedad intrínseca del mismo como la masa.
Describa el significado preciso de la expresión I0 = Md 2cm + I∗.
En los casos mostrados en las columnas segunda y tercera de la pri-mera y tercera fila de la Fig. 4.1, explique cualitativamente por qué elmomento de inercia de la segunda columna es menor que el de la ter-cera.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.7. Sólido rígido con un eje principal de giro 127
4.7.3. Dinámica de la rotación del sólido rígido
A partir de la ecuación general (4.82) que nos relaciona el cambio temporal delmomento angular de un sistema de partículas con el momento dinámico de lasfuerzas externas podemos obtener la ecuación que rige el movimiento de rotaciónde un sólido rígido respecto a un eje fijo. Para ello nos bastará con considerarúnicamente la componente z de la ecuación (4.82), es decir,
dLz
dt= τz,ext (4.107)
donde τz,ext es la componente z del momento de la fuerzas externas y viene dadoen la presente situación por la siguiente expresión:
τz,ext = z ·∑~ri ×~Fi ,ext = z ·∑ ~di ×~Fi ,ext .
Si usamos ahora el hecho de que Lz = Iω, podemos reescribir la ecuación (4.107)como
τz,ext = Idω
dt= Iα (4.108)
que nos relaciona directamente la componente z (con su signo adecuado) del mo-mento de las fuerzas externas con la aceleración angular (α). La anterior ecuaciónpuede identificarse entonces como la ecuación fundamental de la dinámica derotación de un sólido rígido a largo de su eje de rotación (de alguna forma equiva-lente a la segunda ley de Newtwon para el movimiento de traslación) y nos mues-tra claramente el papel de “inercia a la rotación” que ya comentamos con respectoal momento de inercia I .
En el estudio de las rotaciones, una situación de bastante interés práctico seda cuando el momento de las fuerzas externas es nulo. Según nos dice la ecuación(4.82) [o, en su defecto, la ecuación (4.107)], esto implica que el momento angulardel sistema se conserva; es decir
si ~τext = 0 ⇒ ~Lsis = cte . (4.109)Conservación del momento angulardel sistema de partículas
Esta situación se produce, por ejemplo, en el caso de una patinadora cuandorealiza una pirueta en la que empieza a girar con los brazos extendidos y pau-latinamente va cerrando los brazos mientras que aumenta su velocidad angularde giro. Si consideramos el hecho de que tanto la fuerza de la gravedad como lafuerza de contacto normal ejercida por el suelo no ejercen momento en la direc-ción vertical y que el momento de las fuerzas de contacto tangenciales del hielo esdespreciable (el rozamiento con el hielo es muy pequeño), entonces encontramosque
Lz = cte ⇒ I0ω0 = I f ω f .
Supongamos que en una posición inicial la patinadora tiene los brazos extendi-dos en horizontal y llamamos a su momento de inercia inicial I0 y a su velocidadangular inicial ω0. Al cerrar los brazos y llegar a una situación final con los bra-zos extendidos hacia arriba, el momento de inercia final será menor que el inicialI f < I0. Esto implica que para que se cumpla la condición de conservación delmomento angular tendremos necesariamente que ω f >ω0; esto es, la patinadorahabrá aumentado considerablemente su velocidad angular.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
128 Tema 4. Sistemas de partículas
Actividad 4.12:
¿Podemos aplicar la ecuación (4.108) a cualquier SR?
Explique con detalle el papel del momento de inercia del SR como“inercia a la rotación” a la vista de la ecuación (4.108).
¿Por qué decimos en el caso de la patinadora que el momento de lasfuerzas externas no tiene componente en la dirección vertical? Si elmomento angular en la dirección vertical es constante, ¿quiere estodecir que la aceleración angular permanece constante? Si su respuestaes Sí, ¿entonces cómo es que cambia la velocidad angular de la patina-dora?
Explique por qué las fuerzas internas no afectan a la velocidad del cen-tro de masa de la patinadora pero sí lo hacen a la velocidad angular desus giros.
4.7.4. Energía cinética asociada a la rotación de un sólido rígido
En la situación considerada anteriormente en la que el sólido rígido rota alre-dedor de un eje fijo, tenemos que la energía cinética del sólido es únicamente derotación, Ec ≡ Ec,r , y puede escribirse como
Ec,r =∑ 1
2mi v2
i =∑ 1
2miω
2d 2i (4.110)
o, equivalentemente, teniendo en cuenta la definición de momento de inercia res-pecto al eje de rotación, como
Ec ≡ Ec,r = 1
2Iω2 . (4.111)Energía cinética (total) de rotacion
de un sólido respecto a un eje fijo
En el caso particular pero de mucho interés práctico en que el eje de rotaciónpase por el centro de masas y dicho eje se traslade con cierta velocidad v ≡ vcm
(esta velocidad puede ser, en general, variable en el tiempo), podemos aplicar laexpresión (4.47) y escribir que
Ec = Ec,cm +Ec,int . (4.112)
Si tenemos ahora en cuenta la expresión (4.48) que nos dice que
Ec,int =∑
12 mi (v∗
i )2
y que el módulo de la velocidad de las partículas desde el centro de masas puedeescribirse como v∗
i =ωd∗i , entonces
Ec,int =∑
12 mi (d∗
i )2ω2 = 12 I∗ω2 . (4.113)
La anterior expresión nos permite finalmente expresar la energía cinética paraeste caso como
Ec = 1
2M v2
cm + 1
2I∗ω2 (4.114)
donde se han separado explícitamente los términos correspondientes al movi-
Energía cinética total del sólidocon eje de giro en cdm
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.7. Sólido rígido con un eje principal de giro 129
miento de traslación del centro de masas y al del movimiento de rotación en tornoa un eje que pasa por este c.d.m.
Actividad 4.13:
¿Podemos aplicar la ecuación (4.114) al movimiento geneal de un SR?¿Y la ecuación (4.47)?
Si una rueda gira cuando va cayendo por una pendiente, ¿llegaría antesal final de la pendiente en comparación con el caso en que la rueda sedeslizara sin rozamiento? Razone su respuesta.
EJEMPLO 4.2 Una barra delgada y uniforme de longitud L y masa M puede rotar sobreun extremo, En posición horizontal, se deja caer, y el rozamiento es despreciable. Paraun ángulo arbitrario ϕ, a) calcular la aceleración angular de la barra, b) la aceleracióntangencial y la normal, c) la fuerza sobre el pivote. Dato: El momento de inercia de unabarra delgada, respecto a un eje perpendicular a ella que pase por el centro de masas esI∗ = ML2/12.
(a) En primer lugar es conveniente calcular el momento de inercia con respecto al eje derotación fijo O. Para ello hacemos uso de la expresión (4.106) para obtener
IO = Md2cm + I∗ = M(L/2)2 +ML2/12 = ML2/3 .
A continuación notamos que la aplicación de (4.108) nos dará la aceleración angular de labarra. El momento de la fuerza gravitatoria desde O viene dado por τz,ext = M g (L/2)cosϕ,por lo que tenemos que
M gL
2cosϕ= Iα= 1
3ML2α
de donde obtenemos que
α= 3g
2Lcosϕ .
(b) Dado que el movimiento del centro de masas es circular, su aceleración tangencial ynormal vendrán dados por la expresión (2.52) (teniendo en cuenta que en este caso r =L/2). Para la aceleración tangencial tendremos entonces que
acm,τ =αL/2 =⇒ acm,τ = 3g
2Lcosϕ
L
2= 3
4g cosϕ .
Para calcular la aceleración normal, como esta viene dada por acm,n = ω2L/2, debemoscalcular primero la velocidad angular en función del ángulo. Para ello podemos aplicar laconservación de la energía mecánica en este sistema conservativo, es decir
Em (ϕ= 0) = Em (ϕ) .
Notamos ahora que en ϕ = 0 la energía cinética es nula dado que parte del reposo y, ade-más, haremos que la posición horizontal sea nuestra referencia de energía potencial [estoes, Ep (ϕ= 0) = 0]. Ello nos lleva a escribir
0 = Em (ϕ)
= Ep (ϕ)+Ec (ϕ) .
La energía potencial del sólido puede expresarse en función de la energía potencial delcdm, de modo que ésta viene dada por
Ep (ϕ) =−M g hcm
=−M gL
2senϕ .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
130 Tema 4. Sistemas de partículas
Por otra parte, la energía cinética en este caso será únicamente de rotación si la expresamosrespecto al eje fijo O. Usando entonces (4.111) podemos escribir que
Ec (ϕ) = 1
2I0ω
2
= 1
2
ML2
3ω2 = 1
6ML2ω2 .
Haciendo ahora uso de la conservación de la energía mecánica llegamos a que
0 =−M gL
2senϕ+ 1
6ML2ω2
o bien que
g senϕ= 1
3Lω2
de donde obtenemos que
ω2 = 3g
Lsenϕ .
Finalmente podemos escribir que la aceleración normal del centro de masas es
acm,n = 3g
Lsenϕ
L
2= 3
2g senϕ .
(c) Para calcular la fuerza que ejerce el pivote sobre la barra debemos aplicar la segunda leyde Newton a lo largo de las direcciones tangencial y normal al desplazamiento del centrode masa; esto es,
M g cosϕ−F0,τ = M acm,τ
−M g senϕ+F0,n = M acm,n .
Operando en las anteriores ecuaciones tras sustituir los valores previamente obtenidos pa-ra las acelaraciones del cdm obtenemos finalmente que
F0,τ =1
4M g cosϕ
F0,n = 5
2M g senϕ .
EJEMPLO 4.3 Un bloque de masa m1 = 2 kg descansa sobre una mesa sin rozamientounida mediante una cuerda de masa despreciable y a través de una polea con un se-gundo bloque de masa m2 = 5 kg que cuelga a una altura h0 = 0,8m sobre el suelo. Elmomento de inercia de la polea respecto de su eje de giro es I =0,8 kg·m2 y su radio esR = 0,1m. El rozamiento de la polea respecto de su eje es muy pequeño por lo que no setoma en cuenta y la cuerda no desliza sobre la polea. (a) Calcular la aceleración de losbloques en el instante inicial. (b) Usando argumentos de energía calcular la velocidadcon la que el bloque de masa m2 llega al suelo.
(a) Como la polea tiene masa, las tensiones en las cuerdas a cada lado de la polea se-rán distintas. Denominemos a estas tensiones T1 y T2 según apunten a la masa m1 o m2.Estas masas se moverán con la misma aceleración a dado que la cuerda no se estira ni secomprime. Si aplicamos la segunda ley de Newton a cada polea tenemos
T1 = m1a (4.115)
m2g −T2 = m2a . (4.116)
La aplicación de la ecuación fundamental de la rotación (4.107) a la polea, teniendo encuenta la relación que existe entre la aceleración angular α de la polea y la aceleraciónlineal de las masas,
T2R −T1R = Iα , α= a
R,
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.8. Rodadura (*) 131
nos lleva aT2R −T1R = I
a
R=⇒ T2 −T1 = I
a
R2. (4.117)
Operando en (4.115),(4.116) y (4.117) obtenemos
m2g −T2 +T1 +T2 −T1 = m2a +m1a + Ia
R2=
(m1 +m2 +
I
R2
)a
de donde
a = m2g
m1 +m2 +I
R2
= 5×10
2+5+ 0,8
0,12
≈ 0.57m/s2 .
(b) Debido a la conservación de la energía mecánica en el sistema, la variación de laenergía potencial del bloque m2 en su descenso se transforma en energía cinética de tras-lación de los bloques m1 y m2 más energía cinética de rotación en la polea. Esto nos llevaa que
m2g h = 1
2m1v2
1 + 1
2m2v2
2 + 1
2Iω2 .
Si tenemos ahora en cuenta que v1 = v2 ≡ v y que ω = v/R, la ecuación anterior puedereescribirse como
m2g h = 1
2m1v2 + 1
2m2v2 + 1
2I
v2
R2= 1
2
(m1 +m2 +
I
R2
)v2
de donde obtenemos que
v = 2m2g h
m1 +m2 +I
R2
= 2×5×10×0,8
2+5+80≈ 0,92m/s .
4.8. Rodadura (*)
El movimiento de un sólido rígido que únicamente se traslada o bien que úni-camente rota se muestra en la Fig. 4.2 para el caso de una rueda. Si el sólido rígidose traslada a la vez que rota su movimiento se denomina en general rodadura, encuyo caso la propia rotación del objeto es parcial o totalmente responsable de latraslación del mismo (tal y como sucede en una rueda girando sobre el suelo). Siel objeto rota con una velocidad angular ω respecto a un eje que pasa por su cen-tro de masas, las partículas del mismo tienen una velocidad referida al centro demasas que vendrá dada por
~v∗i =~ω×~r∗
i
donde la dirección del vector ~ω es a lo largo del eje de giro. En lo que sigue su-pondremos que los objetos rodantes son únicamente discos, cilindros o esferas.
Llamaremos rodadura sin deslizamiento al caso en el que tenemos un objetoque rota a velocidad angularω (esta velocidad angular no tiene que ser constante)y cuya rotación es completamente responsable de la traslación del objeto. Pode-mos observar que, en ese caso, el punto de contacto del objeto rodante con elsuelo tendrá una velocidad nula, tal y como la tiene el punto del suelo en con-tacto con el objeto.4 Un desplazamiento infinitesimal, ds, de un punto que estásituado en el extremo del objeto rodante (a una distancia R del eje de giro) vendrádado por
ds = R dθ = Rωdt
4 Si se deslizara sí habría una velocidad relativa entre los puntos de contacto del objeto y del suelo,que es lo que ocurre cuando un objeto plano se desliza por el suelo y que ya hemos estudiado entemas anteriores, implicando en este caso un coeficiente de rozamiento dinámico.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
132 Tema 4. Sistemas de partículas
donde hemos hecho uso de la igualdad dθ =ωdt . Ciertamente, durante el tiempodt , este objeto rodante se traslada precisamente esta misma distancia y podemosdecir que ds = v dt , donde la velocidad de traslación del objeto podemos identifi-carla con la de su centro de masas, v ≡ vcm, y escribir finalmente que
vcm =ωR (4.118)
acm =αR . (4.119)
Velocidad y aceleración del c.d.m.en la rodadura sin deslizamiento
Dado que la velocidad de las partículas del objeto rodante se puede escribiren función de la velocidad del c.d.m. como
~vi =~vcm +~v∗i
observamos que obtenemos un patrón de velocidades como el que se muestraen la figura adjunta (este patrón es fruto de la suma de las velocidades que semuestran en la Fig. 4.2). Es interesante observar que el punto más alto del objetorodante tiene una velocidad instantánea doble que la del centro de masa y nulapara el caso del punto de contacto con el suelo.
Es importante que notenemos que la acción de la fuerza de rozamiento delsuelo es fundamental en la rodadura sin deslizamiento. Sin esta fuerza de roza-miento no puede existir tal rodadura puesto que es la responsable de la apariciónde un momento de la fuerza sobre el objeto rodante y, por tanto, de la propia rota-ción. Para analizar la acción de este momento de la fuerza debemos usar la ecua-ción (4.89), que es la que debe aplicarse en este caso dado que tenemos un ejede giro que tiene un movimiento de traslación arbitrario. Además, es importanteFuerza de rozamiento es estática y
no realiza trabajo en rodadura sindeslizamiento
notar que la fuerza de rozamiento es estática puesto que el punto de contacto ob-jeto/suelo está en reposo (su velocidad relativa es nula). En este caso, la fuerza derozamiento estática no realizará trabajo y el sistema será conservativo en aquelloscasos en los que no participen otras fuerzas de carácter no conservativo.
Actividad 4.14:
Explique por qué en el caso de rodadura sin deslizamiento tenemosque vcm = ωR. Explique también por qué la velocidad del punto decontacto será nula en este caso.
¿Qué tipo de rozamiento (estático/dinámico) existirá en el caso de larodadura sin deslizamiento? ¿Y cuando hay deslizamiento? Razone susrespuestas.
Traslación Rotación
FIGURA 4.2: Velocidad de las partículas del extremo de una rueda que no rota y se trasladay de una rueda que rota y no se traslada (patina).
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.8. Rodadura (*) 133
EJEMPLO 4.4 Esfera rodando sin deslizamiento por un plano inclinado.
Una esfera de masa M y radio R rueda sin deslizar por un plano inclinado de inclina-ción θ. Si parte del reposo, y su centro de masas se encuentra a una altura h +R, a) ¿conqué velocidad llegará a la base de la pendiente? (b) ¿Cuánto valdrá el trabajo realizadopor la fuerza de rozamiento?
R
hSegún la Tabla en la Fig. 4.1 el momento de inercia de la esfera respecto a su centro demasa es
I∗ = 2
5MR2 .
Las ecuaciones que rigen el movimiento de traslación de su centro de masa [ver Eq. (4.18)]y la rotación respecto al mismo [Eq. (4.89)] serán∑
~Fi ,ext = M~acm∑τ∗z = I∗α
que, observando la figura adjunta, se pueden reescribir como
Nh
Mg
Fr
N −M g cosθ = 0 (4.120)
M g senθ−Fr = M acm (4.121)
Fr R = I∗α (4.122)
acm =αR . (4.123)
Sustituyendo en la Ec. (4.122) tenemos que
Fr = I∗ αR
= 2
5MR2 α
R= 2
5M acm .
Por otra parte, sustituyendo en la Ec.(4.121)
M g senθ− 2
5M acm = M acm
obtenemos que la aceleración del c.d.m. es
acm = 5
7g senθ .
Dado que el c.d.m. realiza un movimiento uniformemente acelerado y recorre una distan-cia total d = h/senθ, concluimos que la velocidad al final de la pendiente será
v f =√
2acmd =√
25
7g senθ
h
senθ=
√10
7g h .
Si admitimos que el movimiento de la esfera es una rodadura sin deslizamiento, enton-ces el trabajo de la fuera de rozamiento es nulo, dado que dicha fuerza de rozamiento esestática.
Para que la esfera ruede sin deslizar debe verificarse, por tanto, que
Fr ≤ F maxr ≡µe N =µe M g senθ .
Como la fuerza de rozamiento hemos visto que es Fr = 25 M acm = 2
7 M g senθ, la condiciónanterior implica que
µe M g cosθ ≥ 2
7M g senθ
o equivalentemente
µe ≥ 2
7tanθ . (4.124)
Dado que en esta situación la fuerza de rozamiento no realiza trabajo, nos encontra-mos con que las fuerzas externas que realizan trabajo (la gravedad) son conservativas y, por
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
134 Tema 4. Sistemas de partículas
consiguiente, se conservará la energía mecánica de la esfera . La aplicación de esta condi-ción de energía mecánica constante podemos escribirla para las situaciones en las que laesfera se encuentra arriba en reposo (Ec = 0) y cuando llega al suelo (Ep = 0) como
M g h = 1
2M v2
cm + 1
2I∗ω2
donde hemos hecho uso de la expresión (4.114) para la energía cinética de la esfera rodante.La expresión anterior puede reescribirse como
M g h = 1
2M v2
cm + 1
2
2
5R2 v2
cm
R2= 7
10M v2
cm
que nos dice finalmente que
vcm =√
10
7g h ,
tal y como y ya obtuvimos anteriormente.
En el caso de que no se cumpla la condición (4.124) tenemos que la esfera rueda condeslizamiento (ya no se verifica que acm =αR) y las ecuaciones de movimiento serán ahora
N −M g cosθ = 0 (4.125)
M g senθ−Fr = M acm (4.126)
Fr R = I∗α (4.127)
Fr =µd N . (4.128)
La última de las anteriores ecuaciones nos dice que
Fr =µd M g cosθ
y, al introducirla en (4.126), nos lleva a que
M g senθ−µd M g cosθ = M acm
que nos proporciona el siguiente valor para la aceleración de c.d.m.:
acm = g (senθ−µd cosθ) .
La aceleración angular de la esfera será según (4.127)
α= Fr R
I∗ = µd M g cosθR25 MR2
= 5
2µd g
cosθ
R.
Podemos observar claramente que si no hay rozamiento (µd → 0) entonces la aceleraciónangular será nula y no habrá rodadura (la velocidad angular inicial es nula).
4.9. Problemas propuestos
Dinámica sistema de partículas y choques
4.1: Encontrar el centro de masas (CM) de un triángulo equilátero formado por tres barras muy del-gadas, de longitud a y masa m. Nota: El problema se puede hacer por simetría o calculando en primerlugar el CM de cada barra, reduciendo el problema a tres partículas de masa m cada una de ellas situadaen el CM de cada barra, y luego calcular el CM del sistema completo (para calcular el centro de masasde un sistema se puede dividir en partes, calculando el CM de cada parte y luego el CM del sistemacompleto).Sol.: El c.d.m. está a una altura h/3 medida desde el centro de uno de los lados.
4.2: Demostrar que la energía potencial gravitatoria de un sistema de partículas viene dada por Ep,sis =M g hcm, donde hcm es la altura del centro de masas y M la masa total del sistema.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.9. Problemas propuestos 135
4.3: En un juego de billar hago una carambola (una bola golpea a otra y posteriormente golpea a unasegunda bola). Suponiendo despreciables los efectos de rozamiento, ¿ha variado la velocidad del centrode masas del sistema (tres bolas) justo antes de la primera colisión y justo después de la última colision?Justificar la respuesta.
4.4: Paco, de 90 kg, y María, de 60 kg, se encuentran sobre la superficie resbaladiza de un estanquehelado (no hay rozamiento con el suelo), separados una distancia de 20 m, y unidos mediante unacuerda ligera (de masa despreciable) atada a la cintura de cada uno de ellos. A medio camino entre losdos hay un tarro de su bebida favorita. Los dos tiran de los extremos de la cuerda. Cuando Paco se hamovido 6 m hacia el tarro, (a) ¿en qué dirección y cuánto se ha movido María? (b) Si sólo es Paco el quetira, y no María, cuando éste ha recorrido 6 m, ¿en qué dirección y cuánto se ha movido María?Sol. (a): María se ha movido 9 m hacia Paco. (b): Igual que en el apartado (a).
4.5: Una pequeña masa m1 está colgada del techo mediante un hilo de masa despreciable. Otra masaidéntica está unida a la anterior mediante un muelle también de masa despreciable. El sistema se en-cuentra inicialmente en equilibrio. Si súbitamente se corta el hilo, en ese instante, (a) ¿qué aceleracióntiene cada masa? (b) ¿qué aceleración tiene el centro de masas del sistema?Sol. (a): a1 = 2g , a2 = 0 , (b): acm = g .
4.6: Una pelota de béisbol tiene una masa de 0.145 kg. Se lanza hacia el bateador a una velocidad de45 m/s, éste la golpea y sale en dirección opuesta con una velocidad de 55 m/s. (a) Calcular la variaciónde la cantidad de movimiento de la pelota. (b) Si la pelota está en contacto con el bate durante 2 ms,calcular la fuerza (media) que el bate ejerce sobre la bola. (c) Comprobar, durante este proceso, que elcambio en la cantidad de movimiento debida al peso es despreciable frente a la causada por la fuerzadel bate.Sol. (a): ∆ppel = 14,5kgm/s; (b): Fmed = 7,25kN .
4.7: Un bloque de 4 kg que se mueve hacia la derecha con una velocidad de 6 m/s choca con otrobloque de 2 kg que se mueve también hacia la derecha con una velocidad de 3 m/s. Después de lacolisión los bloques quedan unidos (colisión completamente inelástica), calcular: (a) La velocidad delsistema después de la colisión. (b) La variación de la energía mecánica del sistema. Si se ha perdidoenergía mecánica, ¿en qué se ha transformado?Sol. (a): v f = 5m/s , (b): ∆Ec,sis = 6J .
4.8: Una patinadora de 60 kg está sobre el hielo (no hay rozamiento con el suelo) y sostiene en susmanos dos pesas de 10 kg. Comenzando desde el reposo, lanza consecutivamente las dos pesas hori-zontalmente, una tras otra. La velocidad relativa de cada pesa respecto a la patinadora después de quesea lanzada es vrel=10 m/s. (a) Exprese la velocidad de la pesa vpes recién lanzada respecto al sueloen función de la velocidad de la patinadora tras el lanzamiento vpat. (b) Calcule la velocidad de la pa-
tinadora, v (1)pat (que se mueve en la dirección opuesta al lanzamiento de la pesa) después de lanzar el
primer peso. (c) Calcule de nuevo la velocidad anterior, v (2)pat, tras el segundo lanzamiento. (d) Obtenga
finalmente la velocidad de la patinadora vpat si hubiese tirado las dos pesas al mismo tiempo.
Sol. (a): vpes = vpat +10m/s , (b): v (1)pat =−1,25m/s, (c): v (2)
pat =−2,68m/s; (d): vpat =−2,5m/s.
4.9: Dos pequeñas partículas de masas m1 y m2 se atraen. En el instante inicial, m1 tiene una velo-cidad v dirigida hacia m2, m2 está en reposo, y están separadas una distancia d . En el instante tc laspartículas colisionan. Suponiendo despreciables los efectos gravitatorios, y en general el efecto de fuer-zas externas al sistema, ¿qué distancia recorre m1 desde el instante inicial hasta la colisión? (indicar larespuesta en términos de m1, m2, d y tc ).Sol.: x1(tc ) = m2d/(m1 +m2)+m1v tc /(m1 +m2) .
4.10: Un coche de 1200 kg circula hacia el este cuando en una intersección choca con un camión de3000 kg que circulaba hacia el norte. Después del choque, el camión y el coche quedan unidos, mo-viéndose el conjunto en dirección nordeste formando un ángulo de 60º con la dirección este/oeste, y elvelocímetro del camión quedó bloqueado marcando una velocidad de 50 km/h, que era su velocidadinicial antes del choque. Calcular la velocidad del coche antes de la colisión.Sol.: |~v1| = 72,17km/h .
4.11: Los dos bloques de la figura se separan mediante la explosión de la carga Q colocada entre ellos(la masa del explosivo es muy pequeña, y se puede despreciar). El bloque A, de 100 g, recorre 18 m hastadetenerse. Si el coeficiente de rozamiento entre el suelo y los bloques es µ, ¿qué distancia recorrerá elbloque B, de 300 g, hasta detenerse?Sol.: dB = 2m .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
136 Tema 4. Sistemas de partículas
4.12: Las tres pequeñas bolas de cristal de la figura tienen masas mA = 20g, mB = 30g y mC = 50g.Se mueven hacia el origen sobre una mesa sin fricción con velocidades (en módulo) v A = 1.5 m/s y vB= 0.5 m/s. Las tres bolas llegan al origen simultáneamente. (a) ¿Cuánto tiene que valer ~vC (módulo ydirección) para que las masas queden en el origen, sin moverse, después del choque? (b) ¿Se ha perdidoenergía mecánica en el choque? Si es así, calcular la cantidad perdida e indicar en qué se ha transfor-mado.Sol. (a): vC = 0.793m/s, θ = 19,11o ; (b): Se pierde toda la energía cinética en el choque. Se transformaen deformación, sonido, calor, ...
4.13: Un muelle vertical de constante k=1000 N/m sostiene un plato de 4 kg de masa. Estando el platoen equilibrio, y desde una altura de 5 m respecto al plato, se deja caer una bola de 2 kg que chocaelásticamente con éste. Calcular (a) la altura máxima a la que ascenderá la bola después del choque y(b) la máxima deformación del muelle.Sol. (a) h = 5/9m , (b): ∆= 0.46m .
4.14: Una bala de masa m y velocidad v atraviesa la lenteja de un péndulo (masa de pequeñas di-mensiones que cuelga de la cuerda formando un péndulo), inicialmente en reposo, saliendo con ve-locidad v/2. La lenteja de masa M está en el extremo de una cuerda de longitud l . (a) Determine lavelocidad V con la que comienza a moverse la lenteja del péndulo. (b) Calcule la velocidad mínima dela bala para que el péndulo dé una vuelta completa. Desprecie el rozamiento con el aire y exprese todoslos resultados en función de v , m, M , l y g .Sol. (a) V = m
Mv2 , (b): v = M
m
√10g l .
Sólido rígido
4.15: Dos moléculas formadas por dos grupos de átomos muy similares, de la misma masa m, se dife-rencian en su estructura espacial, como se indica en la figura. Estas moléculas pueden rotar alrededorde un eje perpendicular al papel que pasa por el punto O. Si se aplica el mismo par de fuerzas a cadauna de las moléculas, ¿cuál girará con mayor aceleración angular, (a) ó (b)? Justificar brevemente larespuesta.
4.16: En la bicicleta de la figura, la rueda dentada trasera tiene un radio r2 y está unida por medio deuna cadena con la rueda dentada delantera, de radio r1. Si se pedalea a un ritmo de n pedaladas porsegundo (n vueltas por segundo), ¿cuánto vale la velocidad angular de la rueda trasera?
4.17: Demostrar que el momento de un sistema de fuerzas cuya resultante es nula (∑~Fi ,ext = 0) es el
mismo independientemente del origen de coordenadas que se tome.
4.18: Explique con detalle las condiciones que hacen que el cambio del momento angular de un sis-tema de partículas sea nulo durante una colisión (tenga en cuenta que entre las partículas se ejercenfuerzas internas y que también actúan fuerzas externas).
4.19: Una escalera AB de peso 40 N descansa sobre una pared vertical haciendo un ángulo 60º con elsuelo. Encontrar las fuerzas sobre la escalera en A y B. La escalera tiene rodillos en A, de modo que lafricción es despreciable en ese punto (en B sí hay rozamiento).
4.20: Una barra de madera uniforme de masa m1 = 20 kg está apoyada en dos soportes A y B como seindica en la figura. Un bloque de acero de masa m2 = 30 kg está situado a la derecha del soporte A. (a)Calcular las fuerzas FA y FB que ejercen verticalmente los soportes si x = 1 m. (b) Calcular la distanciax máxima a la que se puede situar el bloque de acero sin que la barra se incline y vuelque. Nota Usarg = 10 m/s2.Sol. (a) FA = 450N, FB = 50N; (b): x = 2m .
4.21: Para empujar un armario de 100 kg se aplica una fuerza F a una altura de 1.5 m, como se indicaen la figura. Si el coeficiente de rozamiento estático entre el armario y el suelo es de 0.5, determinar:a) El valor de la fuerza F que hace que el sistema esté a punto de deslizar. b) El valor de F que haceque el sistema esté a punto de volcar. c) Si partimos de F = 0 y aumentamos poco a poco el valor deesta fuerza, ¿qué ocurrirá en primer lugar, el deslizamiento o el vuelco? Justificar la respuesta. Nota:para simplificar los cálculos, considerar g = 10 m/s2 y recordar que la fuerza normal del suelo sobre elarmario es una fuerza repartida por toda la superficie de contacto, que equivale a una sola fuerza. Si elsistema está en equilibrio su módulo y punto de aplicación tendrán que ser tales que compensen lasfuerzas y momentos aplicados.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
4.9. Problemas propuestos 137
4.22: Un disco homogéneo de masa M y radio r está unido (soldado) a una barra homogénea de masam y longitud L = 3r en el punto A. El punto A coincide con el punto medio de la barra. El sistemapuede rotar con respecto a un eje perpendicular que pasa por el punto O, donde se encuentra unaarticulación. En el instante mostrado en la figura hay una fuerza aplicada F = 4N tal y como se indica,su velocidad angular es ω= 0 y θ = 30◦. (a) Demostrar que el momento de inercia de la estructura conrespecto a su eje de rotación (que pasa por O) es IO = (31/4)mr 2. (b) Calcule las posición del centrode masas de la estructura. En el instante indicado en la figura, (c) represente el diagrama de fuerzas(diagrama de cuerpo libre) de la estructura y calcule la aceleración angular del sistema, indicando sies en sentido horario (�) o antihorario (). (d) En ese mismo instante, calcule las fuerzas aplicadas alsistema en el punto O.[Datos: ICM(barra) = mL2/12, ICM(disco) = MR2/2, M = 2m, m = 2kg, r = 15cm.]Sol.: (b) ycm = (4/3)r ; (c) α= 4,27rad/s2; (d) Fτ = F cos(π/6), Fn = 3mg .
4.23: Una barra delgada y uniforme de longitud L y masa m puede rotar sobre un extremo, En posi-ción horizontal, se deja caer, y el rozamiento es despreciable. a) En ese instante, calcular la aceleraciónangular de la barra, la aceleración de su centro de masas y de su extremo. b) En ese instante, calcularla fuerza de reacción del pivote sobre la barra. c) Cuando la barra se encuentre en posición vertical,calcular la velocidad y aceleración de su extremo. Dato: El momento de inercia de una barra delgada,respecto a un eje perpendicular a ella que pase por el centro de masas es I∗ = ML2/12.
4.24: Un disco uniforme de radio R y masa M pivota alrededor de un eje horizontal paralelo a su ejede simetría y que pasa a través un punto de su perímetro, de forma que puede oscilar libremente enel plano vertical. Se libera desde el reposo con su centro de masa en la misma altura que el pivote. (a)¿Cuál es la velocidad angular del disco cuando su centro de masa está directamente debajo del pivote?(b) ¿Cuál es la fuerza es ejercida por el eje sobre el disco en este momento?Dato: momento de inercia con respecto a un eje que pasa por su centro de masa I∗ = 1/2MR2.
4.25: El sistema de la figura está inicialmente en reposo. El bloque de 30 kg está a 2 m del suelo. Lapolea (I = MR2/2) es un disco uniforme de 20 cm de diámetro y 5 kg de masa. Se supone que la cuerdano resbala sobre la polea. Encontrar: a) La velocidad del bloque de 30 kg justo antes de tocar el suelo yla velocidad angular de la polea en ese instante. b) Las tensiones de la cuerda. c) El tiempo que tarda elbloque de 30 kg en tocar el suelo. (Resolver el problema por dinámica y aplicando el balance energético)
4.26: Las poleas de la figura están unidas y giran unidas respecto al eje fijo mostrado que pasa por sucentro, siendo el radio de la polea mayor R1 y el de la polea menor R2 con masas M1 y M2. (a) Encuentreel valor de m2 en función de las variables conocidas del problema para que el sistema esté en equilibrio(b) Calcule la aceleración de m1 suponiendo que esta masa desciende. (c) Halle la velocidad angular,ω,de las poleas cuando m1 ha descendido una altura h partiendo del reposo. Dato: el momento de inerciade un disco de radio R y masa M respecto a un eje perpendicular que pasa por su centro de masas esI = 1
2 MR2.
Sol. (a): m2 = m1R1/R2; (b): a1 = g R1 (m1R1 − m2R2)/[(m1 + M1/2)R21 + (m2 + M2/2)R2
2 ] ; (c): ω =√2a1h/R1.
4.27: Un disco de masa m y radio R gira alrededor de un eje que pasa por su centro con velocidadangular ω0. Si se deja caer un “pegote” de barro, de masa m/4, a una distancia R/2 de su centro, que-dando éste adherido a la superficie del disco, y suponiendo que el rozamiento entre el disco y el eje esdespreciable (y con el aire también). a) ¿Cambiará el momento angular en la dirección del eje de rota-ción cuando cae el barro? Justificar la respuesta. b) ¿Con qué velocidad angular girará ahora el sistema?Dato: El momento de inercia de un disco respecto a un eje perpendicular que pasa por su centro degravedad es IG = mR2/2.
4.28: Una bala de 0.2 kg y velocidad horizontal de 120 m/s, choca contra un pequeño diente situadoen la periferia de un volante de masa 1.5 kg y 12 cm de radio (I = MR2/2), empotrándose en el mismo.Suponiendo que la bala es una masa puntual, que el volante es un disco macizo y homogéneo (no setiene en cuenta el pequeño diente), calcular la velocidad angular adquirida por el sistema disco y baladespués del choque, y la pérdida de energía.
4.29: Una esfera de masa M y radio R rueda sin deslizar por un plano inclinado (IG = (2/5)MR2). Siparte del reposo, y su centro de masas se encuentra a una altura h +R, (a) ¿con qué velocidad llegará ala base de la pendiente? (b) ¿Cuánto valdrá el trabajo realizado por la fuerza de rozamiento?
4.30: Liberadas desde el reposo a la misma altura, una esfera hueca (Ih = 2/3MR2) y una esfera sólida(IS = 2/5MR2) de la misma masa M y radio R ruedan sin deslizarse por una pendiente a través de lamisma caída vertical H . Cada una se mueve horizontalmente cuando sale de la rampa. La esfera huecagolpea el suelo a una distancia horizontal Lh desde el final de la rampa y la esfera sólida golpea en elsuelo a una distancia Ls . (a): Calcule la velocidad de salida de la rampa de cada esfera. (b): Halle larelación Ls /Lh .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
138 Tema 4. Sistemas de partículas
4.31: Un bloque de m2 = 6 kg y una esfera de m1 = 10 kg y radio R1 = 20 cm están unidos por un hiloinextensible y sin peso (masa despreciable) que pasa a través de una polea en forma de disco de masam3 = 2 kg y radio R3 = 10 cm. La esfera rueda sin deslizar subiendo por un plano inclinado 300, y lacuerda hace girar la polea sin deslizar sobre ella. El sistema parte del reposo. Hallar: a) Las tensionesen la cuerda. b) La aceleración del sistema. c) La velocidad de la esfera y del bloque cuando se handesplazado 1.5 m resolviendo el problema cinemático. d) La velocidad de la esfera y del bloque cuandose han desplazado 1.5 m utilizando energías.Datos: el momento de inercia respecto a un eje que pasa por su centro, para una esfera de radio R esI = 2mR2/5, y para un disco de radio R es I = mR2/2
4.32: En una rueda de 50 kg se enrolla una cuerda y se tira de ella horizontalmente con una fuerza de200 N, como se indica en la figura. El momento de inercia de la rueda respecto a un eje perpendicular almovimiento que pasa por su centro es de 0.245 kg·m2 y los coeficientes de rozamiento entre la rueda yel suelo son µe =0.2 y µd =0.15. (a) Demostrar que la rueda no realiza un movimiento solo de rodadura,sino que a la vez que rueda desliza sobre el suelo. (b) Calcular la aceleración de su centro de masas y suaceleración angular.
Apuntes de Física 1 JCM,FLML
CopiaUso
Académico
TEMA 5
Mecánica de Fluidos
5.1. Introducción
Una forma común de clasificar la materia distingue tres posibles estados: só-lido, líquido y gaseoso. La experiencia nos dice que un sólido tiene una formay un volumen determinados (una bola acero mantiene su forma en el tiempo).También sabemos que un líquido tiene un volumen definido, pero no una formaconcreta: una cierta cantidad de agua líquida tiene un volumen fijo pero toma laforma del recipiente que la contiene. Finalmente, un gas que no esté confinadono tiene ni volumen ni forma definidos. Estas definiciones nos ayudan a describirlos estados de la materia, pero son bastante ambiguas. Por ejemplo, el asfalto, elvidrio y los plásticos se consideran normalmente como sólidos, pero con el pasodel tiempo tienden a fluir como líquidos. Asimismo, la mayoría de las sustanciaspueden ser un sólido, un líquido o un gas (o una combinación de las tres posibili-dades), dependiendo de la temperatura y de la presión. En general, el tiempo queinvierte una sustancia concreta en cambiar su forma como respuesta a una fuerzaexterna determina si debemos tratar a dicha sustancia como sólido, líquido o gas.
Definición de fluidoUn fluido es un conjunto de moléculas que se distribuyen aleatoriamente y
que se mantienen unidas gracias a las débiles fuerzas de cohesión que se creanentre dichas moléculas y también a las fuerzas ejercidas por las paredes del reci-piente. Tanto los líquidos como los gases son fluidos. En este tema sobre la me-cánica de los fluidos, veremos que no se necesitan nuevos principios físicos paraexplicar efectos tales como el empuje que experimenta un objeto sumergido o lasustentación del ala de un avión.
En primer lugar, consideraremos la mecánica de fluidos en reposo, es decir,la estática de fluidos o hidrostática, y deduciremos una expresión para la presiónejercida por un fluido en función de su densidad y profundidad. También consi-deraremos la mecánica de fluidos en movimiento, es decir, la dinámica de fluidoso hidrodinámica. A partir de ciertas simplificaciones, se describirá la dinámicade un fluido en movimiento mediante dos ecuaciones básicas: la de continuidady la de Bernoulli, que relacionarán la presión, densidad y velocidad en todos lospuntos del fluido.
139
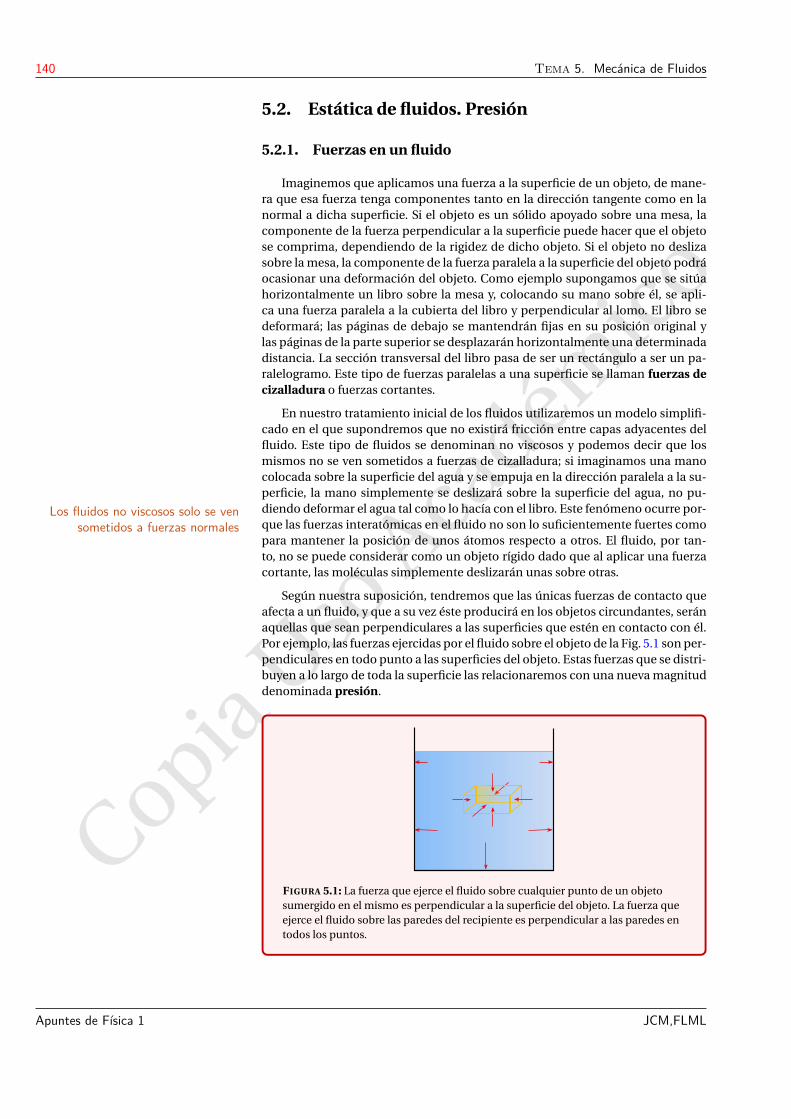
CopiaUso
Académico
140 Tema 5. Mecánica de Fluidos
5.2. Estática de fluidos. Presión
5.2.1. Fuerzas en un fluido
Imaginemos que aplicamos una fuerza a la superficie de un objeto, de mane-ra que esa fuerza tenga componentes tanto en la dirección tangente como en lanormal a dicha superficie. Si el objeto es un sólido apoyado sobre una mesa, lacomponente de la fuerza perpendicular a la superficie puede hacer que el objetose comprima, dependiendo de la rigidez de dicho objeto. Si el objeto no deslizasobre la mesa, la componente de la fuerza paralela a la superficie del objeto podráocasionar una deformación del objeto. Como ejemplo supongamos que se sitúahorizontalmente un libro sobre la mesa y, colocando su mano sobre él, se apli-ca una fuerza paralela a la cubierta del libro y perpendicular al lomo. El libro sedeformará; las páginas de debajo se mantendrán fijas en su posición original ylas páginas de la parte superior se desplazarán horizontalmente una determinadadistancia. La sección transversal del libro pasa de ser un rectángulo a ser un pa-ralelogramo. Este tipo de fuerzas paralelas a una superficie se llaman fuerzas decizalladura o fuerzas cortantes.
En nuestro tratamiento inicial de los fluidos utilizaremos un modelo simplifi-cado en el que supondremos que no existirá fricción entre capas adyacentes delfluido. Este tipo de fluidos se denominan no viscosos y podemos decir que losmismos no se ven sometidos a fuerzas de cizalladura; si imaginamos una manocolocada sobre la superficie del agua y se empuja en la dirección paralela a la su-
Los fluidos no viscosos solo se vensometidos a fuerzas normales
perficie, la mano simplemente se deslizará sobre la superficie del agua, no pu-diendo deformar el agua tal como lo hacía con el libro. Este fenómeno ocurre por-que las fuerzas interatómicas en el fluido no son lo suficientemente fuertes comopara mantener la posición de unos átomos respecto a otros. El fluido, por tan-to, no se puede considerar como un objeto rígido dado que al aplicar una fuerzacortante, las moléculas simplemente deslizarán unas sobre otras.
Según nuestra suposición, tendremos que las únicas fuerzas de contacto queafecta a un fluido, y que a su vez éste producirá en los objetos circundantes, seránaquellas que sean perpendiculares a las superficies que estén en contacto con él.Por ejemplo, las fuerzas ejercidas por el fluido sobre el objeto de la Fig. 5.1 son per-pendiculares en todo punto a las superficies del objeto. Estas fuerzas que se distri-buyen a lo largo de toda la superficie las relacionaremos con una nueva magnituddenominada presión.
FIGURA 5.1: La fuerza que ejerce el fluido sobre cualquier punto de un objetosumergido en el mismo es perpendicular a la superficie del objeto. La fuerza queejerce el fluido sobre las paredes del recipiente es perpendicular a las paredes entodos los puntos.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.2. Estática de fluidos. Presión 141
De este modo, si un objeto está sumergido en cierto fluido y dF es el módulode la fuerza normal ejercida por el fluido en cierto punto sobre un elemento desuperficie infinitesimal de área dA, entonces la presión p ejercida por el fluido enese punto se define como
Presión sobre un puntop = dF
dA. (5.1)
Para el caso de un objeto cuya superficie A está a la misma profundidad en elfluido tendremos que la presión en esta superficie viene dada por
Presión sobre una superficiep = F
A. (5.2)
Obsérvese que la presión es una magnitud escalar.
Dado que la presión es una fuerza por unidad de área, tiene unidades de N/m2
en el Sistema Internacional. El nombre para la unidad de presión en el SistemaInternacional es el pascal (Pa):
1 Pa = 1 N/m2 .
El pascal es una unidad de presión bastante pequeña, por lo que se utiliza común-mente un múltiplo suyo, el bar,
1 bar = 105 Pa .
En meteorología, la unidad más utilizada es el milibar (mbar) o, equivalentemen-te, el hectopascal (hPa).
La atmósfera (que no es más que un fluido formado por moléculas de aire)ejerce una presión sobre la superficie de la Tierra y sobre todos los objetos situa-dos en ella. Esta presión es la responsable de que funcionen las ventosas, las paji-tas de los refrescos, las aspiradoras y muchos otros aparatos. El valor de la presiónatmosférica al nivel del mar se denomina como “una atmósfera” y tiene un valoren el SI de
1 atm = 101325Pa = 1013,25hPa = 1013,25mbar .
Obsérvese que la presión y la fuerza son magnitudes diferentes. Podemos ob-tener una presión muy grande a partir de una fuerza relativamente pequeña. Éstees el caso de las agujas hipodérmicas. El área de la punta de la aguja es muy pe-queña; por ello, basta con ejercer una pequeña fuerza sobre la aguja para generaruna presión suficientemente grande que perfore la piel. También podemos gene-rar una presión pequeña a partir de una fuerza grande, aumentando el área sobrela que se actúa la fuerza. Este es el principio que subyace en el diseño de las ra-quetas para andar sobre la nieve. Si una persona caminara sobre una capa espesade nieve con zapatos normales, es posible que sus pies atravesaran la nieve y sehundieran. Las raquetas para la nieve, sin embargo, permiten que la fuerza quese ejerce sobre la nieve debido al peso de la persona se distribuya sobre un áreamayor, reduciendo suficientemente la presión como para que la superficie de lanieve no se rompa.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
142 Tema 5. Mecánica de Fluidos
Actividad 5.1:
Diga si son verdaderas o falsas las siguientes afirmaciones. Razone surespuesta.
• Las fuerzas que ejerce un fluido sobre su entorno o sobre un objetosumergido en el mismo son siempre fuerzas de contacto.
• Las fuerzas que se ejercen sobre un fluido pueden ser de contactoy también de acción a distancia.
• Las fuerzas de contacto sobre un fluido viscoso solo tienen com-ponentes tangenciales (fuerzas de cizalladura).
• Las fuerzas de contacto sobre un fluido no viscoso solo pueden sernormales.
• Las fuerzas que ejerce un fluido no viscoso sobre su entorno o so-bre un objeto sumergido en el mismo son siempre fuerzas norma-les.
• Las fuerzas que ejerce un fluido sobre un objeto sumergido en elmismo son dependientes de la forma y orientación de la superficiede contacto.
En la expresión de la fuerza que ejerce un fluido en cierto punto porunidad de superficie, presión p = dF /dA, señale qué afirmaciones sonverdades o falsas. Razone su respuesta.
• dF es la componente normal de la fuerza.
• dF es el módulo de la fuerza normal.
• dF es el módulo de la fuerza total.
Explique qué diferencia hay entre p = dF /dA y p = F /A.
La unidad de presión en el S.I. es el bar. ¿Verdadero o Falso?
La presión atmosférica es aproximadamente 105 Pa, lo que implica quela fuerza que ejerce la atmósfera sobre la parte superior de una chapade madera de 1 m2 que fuese sostenida por una persona con los brazosen alto es de 105 kg. ¿Cómo es posible entonces que cualquier personapueda sostener esta chapa de madera sin mayor problema?
5.2.2. Ecuación fundamental de la hidrostática
En el estudio de la mecánica de fluidos es muy importante la densidad demasa de una sustancia. Esta magnitud escalar se define para cada punto como elcociente entre la masa diferencial (dm) que hay en un volumen diferencial (dV )que contiene al punto y dicho diferencial de volumen:
Densidad de masa ρ = dm
dV. (5.3)
La unidad de densidad de masa en el Sistema Internacional es kg/m3. Otra uni-dad muy utilizada es g/cm3 (sistema CGS), de modo que 1 kg/m3=10−3 g/cm3.La densidad del agua destilada a 4oC es 1 g/cm3 y la del aire a temperatura am-biente aproximadamente 1 kg/m3. La densidad varía con la temperatura porque
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.2. Estática de fluidos. Presión 143
el volumen de una sustancia depende de la temperatura a la que se encuentre.
Como bien sabe cualquier persona que haya buceado, la presión dentro delagua aumenta a medida que nos sumergimos a mayor profundidad. Asimismo,la presión atmosférica disminuye cuando aumenta la altitud (por esta razón, losaviones, que vuelan a una gran altitud, deben tener cabinas presurizadas paraproporcionar suficiente oxígeno a los pasajeros). Calculemos entonces de formacuantitativa cómo aumenta la presión con la profundidad o, equivalentemente,cómo disminuye con la altura. Para ello, supongamos un líquido en reposo dedensidad ρ (en general, la densidad puede variar con la altura) como el de la figuraadjunta. Consideremos una porción de fluido de espesor dy cuyas caras tienen unárea A. La masa de esta porción de fluido esρAdy y su pesoρg Ady . Si esta porciónde fluido y el fluido circundanete están en equilibio, la fuerza resultante del propiofluido sobre esta porción de fluido debe ser nula, es decir
∑Fx = ∑
Fy = ∑Fz = 0.
En las direccionesx y z sólo existen fuerzas debido al fluido que se compensan tri-vialmente. En cambio, en la dirección vertical (y) actúa también el peso del fluido,por lo que ha de cumplirse que
p(y)A−p(y +dy)A−ρg Ady = 0
es decir,1
dp =−ρg dy . (5.4)
Esta ecuación se denomina ecuación fundamental de la estática de fluidos. Ob-
Ecuación fundamental de la estáticade fluidos
sérvese que ρ y g son cantidades positivas. Por tanto, a un incremento de altura(dy > 0) corresponde un descenso de presión (dp < 0) y viceversa, tal como co-mentamos anteriormente.
A partir de (5.4) el tratamiento difiere para gases y para líquidos debido a quelos líquidos son prácticamente incompresibles, lo cual quiere decir que su densi-dad permanece constante. En efecto, si consideramos un fluido incompresible, laintegración de (5.4) es inmediata:
∫ 2
1dp =−
∫ 2
1ρg dy
p2 −p1 =−ρg (y2 − y1) (5.5)
donde p2 y p1 son las presiones correspondientes a dos niveles y2 e y1.
Ecuación fundamental de la hidrostá-tica (fluidos incompresibles)
Apliquemos la ecuación (5.5) al líquido contenido en un vaso u otro recipiente
(1)
(2)
1
2
h
con una superficie libre abierta a la atmósfera (ver figura adyacente) y tomemos elpunto 2 en la superficie libre donde la presión p2 coincide con la presión atmos-férica patm. El punto 1 corresponderá a un nivel cualquiera donde la presión es p.Si definimos la profundidad h = y2 − y1, tenemos entonces que
p(h) = patm +ρg h . (5.6)
Como podemos observar, la forma del recipiente no influye para nada en lapresión (esta sólo depende de la profundidad). En consecuencia, recipientes condiferente forma soportan la misma presión en su fondo si el nivel de líquido es elmismo en todos ellos. A este fenómeno se le conoce como paradoja hidrostática.El fondo de cada uno de los recipientes de la figura adyacente soporta la mismapresión.
1 Notemos aquí que p(y +dy)−p(y) = dp .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
144 Tema 5. Mecánica de Fluidos
Otra interesante consecuencia de la ecuación (5.5) es que todos los puntos deun fluido incomprensible en reposo sometidos a la misma presión están a la mis-ma altura. En este hecho se basa el principio de los vasos comunicantes, segúnel cual la superficie libre de un líquido distribuido entre diferentes vasos comu-nicados entre sí ha de estar en un plano horizontal (ver figura adyacente). Unaconsecuencia inmediata de este principio es que la superficie libre de un líquidocontenido en un recipiente sea horizontal.
A la vista de la ecuación (5.6), podemos deducir que cualquier aumento depresión en la superficie del fluido deberá transmitirse a todos los puntos del inte-rior de dicho fluido. Este hecho fue descubierto por primera vez por el científico yfilósofo francés Blaise Pascal y se llamó principio de Pascal, según el cual
Un cambio en la presión aplicada sobre el líquido contenido en unrecipiente se transmite con la misma intensidad a todos los puntosdel fluido y a las paredes del recipiente.
Una aplicación importante del principio de Pascal es la prensa hidráulica,que se ilustra en la Figura 5.2. Si se aplica una fuerza F1 a un pistón pequeño deárea A1, la presión se transfiere a través del líquido al pistón de área A2, siendo F2
la fuerza que ejerce el líquido ejerce sobre el pistón. Como la presión del líquidoes la misma en ambos pistones, vemos que
p = F1/A1 = F2/A2 =⇒ F2 = A2
A1F1 .
La fuerza F2 es entonces un factor A2/A1 mayor que F1. Los frenos hidráulicos,los elevadores de coches, los gatos hidráulicos y los ascensores hacen uso de esteprincipio.
FIGURA 5.2: Diagrama de una prensa hidráulica. Como el aumento de presión esel mismo en lado izquierdo que en el derecho, una fuerza pequeña F1 aplicada enla parte izquierda produce una fuerza F2 mucho mayor en la parte derecha.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.2. Estática de fluidos. Presión 145
Actividad 5.2:
¿Por qué aparece un signo negativo en la ecuación dp =−ρg dy ?
¿Podemos aplicar la ecuación p2−p1 =−ρg (y2−y1) a cualquier fluido?Razone su respuesta.
La ecuación (5.6) nos da la presión en un líquido incompresible a unaprofundidad h de su superficie. Derive la forma de esta ecuación sitenemos dos líquidos incompresibles e inmiscibles de densidades ρa
y ρb . [Distinga si la presión se obtiene en el líquido a o en el b.]
Razone si son verdaderas o falsas las siguientes afirmaciones:
• La presión en un fluido es la misma para la misma cota de profun-didad y no depende en absoluto de lo que haya por debajo de estacota.
• La presión en un fluido a cierta profundidad depende de la formaen la que está contenido el fluido por encima de esta cota.
Desde un punto de vista práctico ¿qué precauciones deberíamos to-mar para realizar una prensa hidráulica?
¿Sería conveniente sustituir el líquido de la prensa hidráulica por aire?Razone su respuesta.
EJEMPLO 5.1 Fuerza en la pared de una presaEl agua almacenada detrás de una presa de anchura w alcanza una altura H . Determinarla fuerza total ejercida sobre la presa.
En primer lugar es muy importante darnos cuenta de que NO podemos calcular lafuerza sobre la presa multiplicando el área por la presión, ya que la presión en este casovaría con la profundidad. El problema puede resolverse calculando la fuerza dF sobre unabanda horizontal infinitesimalmente estrecha situada a la profundidad h, e integrando laexpresión para calcular la fuerza total en toda la presa.
La presión en la porción sombreada en la Figura, situada a una profundidad h por de-bajo de la superficie es
p = ρg h = ρg (H − y)
(No hemos incluido la presión atmosférica en nuestro cálculos porque actúa en amboslados de la presa, de manera que su contribución a la fuerza total es nula). A partir de laecuación (5.1), encontramos que la fuerza en la banda sombreada de área dA es
dF = pdA
Como dA = wdy , tenemos que
dF = ρg (H − y)wdy
Así, la fuerza total en la presa es
F =∫ H
0ρg (H − y)wdy = 1
2ρg w H2
Obsérvese que, como la presión aumenta con la profundidad, las presas deben dise-ñarse de forma que su espesor aumente también con la profundidad, como se muestra enla figura.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
146 Tema 5. Mecánica de Fluidos
La relación entre la presión y la altura (o profundidad) es más complicada enun gas que en un líquido, debido a que la densidad de un gas no permanece cons-tante al variar la presión. La presión de una columna de aire disminuye al au-mentar la altitud considerada desde la superficie de la Tierra, como sucede con lapresión de una columna de agua, pero a diferencia de este caso, la disminuciónde presión con la altura no es lineal con la distancia. En lugar de ello, la presióndecrece de forma exponencial, hecho que se conoce como ley atmosférica. Comola densidad del aire es proporcional a la presión, esta densidad también disminu-ye con la altura. Así, se dispone de bastante menos oxígeno en una montaña quea elevaciones normales.
EJEMPLO 5.2 La ley atmosféricaDemostrar la ley atmosférica suponiendo que la densidad del aire es proporcional a lapresión
Mediciones sobre el aire nos dicen que la presión en el aire varía linealmente con lapresión, esto es, ρ(p) =βp. Si en un nivel de referencia determinado (por ejemplo, el niveldel mar) tenemos que p = p0, siendo p0 la presión atmosférica, y ρ(po ) = ρo , entoncespodemos determinar que β= ρo/p0, y escribir por tanto
ρ(p) =βp = ρop
p0
Si se introduce este resultado en la ecuación (5.5) llegamos a
dp =−ρg dy =−βpg dy
o, equivalentemente,d p
p=−βg dy .
Integrando esta última ecuación, tomando p(y = 0) = p0 y p(y = h) = p(h), se obtiene∫ h
0
d p
p=−
∫ h
0βg dy
lnp(h)
p0=−βg h
es decir,
p(h) = p0e−αh (5.7)
conα=−gρo/p0[≈ 10−4 m−1 si la referencia es el nivel del mar] . Notemos que esta ley nosdice que la caída de la presión atmosférica con la altura es exponencial.
5.2.3. Manómetros y barómetros
Para medir presiones podemos utilizar la expresión (5.6) que nos dice que ladiferencia de presión en un líquido es proporcional a la profundidad. En la figu-ra adyacente se muestra un medidor de presión simple, el manómetro de tuboabierto o en U, el cual contiene al líquido manométrico. Uno de los extremos es-tá abierto y, por tanto, a la presión atmosférica (p0 = patm), mientras que el otroextremo está conectado a un gas de presión desconocida p, que es la que se quie-re medir. La presión en los puntos A y B debe ser igual por la ecuación (5.5), y lapresión en A es igual a la presión desconocida del gas. Así, igualando la presiónen A a la del punto B , vemos que, aplicando (5.6), p = patm +ρg h, donde ρ es ladensidad del líquido manométrico. A la presión p se le denomina presión abso-luta, mientras que a la diferencia p −patm, que es igual a ρg h, se le llama presión
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.3. Flotación. Principio de Arquímedes 147
manométrica o relativa. Ésta es la presión que se mide en la cámara de la rue-da de un coche. Cuando la cámara se encuentra completamente deshinchada, lapresión manométrica es nula, y la presión absoluta es igual a la atmosférica.
La figura adyacente muestra un barómetro de mercurio utilizado para medir
A B
la presión atmosférica. Uno de los extremos parte de un tubo de gran longitud queestá cerrado y se le ha hecho el vacío de forma que la presión en su interior es iguala cero. Dado que todos los puntos a idéntica altura deben tener la misma presión,vemos que la presión en el punto A debida a la columna de mercurio debe serigual a la presión en el punto B debida a la atmósfera. Si esto no fuera así, la fuerzaneta movería el mercurio de un punto a otro hasta que se llegara al equilibrio.Por tanto, p0 = patm = ρHgg h donde ρHg es la densidad del mercurio. A 0ºC, ladensidad del mercurio es ρHg = 13.595g/cm3, por lo que la altura de la columnadel líquido barométrico a la presión atmosférica (patm = 101325Pa) es 760 mm. Espor ello que se utiliza también como unidad de presión el milímetro de mercurio(mmHg), también llamado “torr” en honor del físico italiano E. Torricelli, inventordel barómetro.
5.3. Flotación. Principio de Arquímedes
En esta sección estudiaremos el origen de la fuerza de empuje, que es la fuer-za ascendente que actúa sobre un objeto cuando está sumergido en un fluido. Lasfuerzas de empuje se hacen patentes en muchas situaciones: cualquiera que ha-ya subido en una barca ha experimentado la fuerza de empuje, que impide queesta se hunda. Otro ejemplo típico es la relativa facilidad con que se puede levan-tar a una persona sumergida en el agua, en comparación con intentar levantarlafuera del agua. Evidentemente, el agua proporciona un apoyo parcial a cualquierobjeto introducido en ella. Todos estos fenómenos pueden explicarse mediante elsiguiente enunciado conocido como principio de Arquímedes:
Todo objeto total o parcialmente sumergido en un fluido experi-menta una fuerza ascendente o empuje de valor igual al peso delfluido desalojado por el objeto.
Principio de Arquímedes
El principio de Arquímedes puede demostrarse de la siguiente manera. Su-pongamos la región cúbica de fluido del recipiente dibujado en la figura. Estaporción de fluido está en equilibrio debido a la compensación de las fuerzas queactúan sobre él. Una de las fuerzas aplicadas en dirección vertical es la fuerza gra-vitatoria, debiendo ser nula la suma de las fuerzas exteriores aplicadas en estadirección. ¿Qué anulará el efecto de la fuerza gravitatoria descendente, permi-tiendo que esta porción de fluido permanezca en equilibrio? Ciertamente, debeser el resto del fluido contenido en el recipiente el que esté ejerciendo una fuer-za ascendente, el empuje. Por consiguiente, el módulo de esta fuerza ascendentedebe ser igual al peso de la porción de fluido contenido en la región cúbica:∑
Fy = 0 ⇒ B −Fg = 0 ⇒ B = M g
donde M es la masa de esta porción de fluido. Ahora, imaginemos que sustituimosla región cúbica de fluido por una porción de acero de las mismas dimensiones.¿Cuál sería la fuerza de empuje sobre el acero? El fluido circundante se compor-ta de la misma forma tanto si está ejerciendo una presión sobre una porción defluido como si se trata de una porción de acero (recordemos que la presión la ori-ginaban únicamente las fuerzas normales). La fuerza de empuje que actúa sobreel acero es entonces la misma que la que actúa sobre la porción de fluido de las
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
148 Tema 5. Mecánica de Fluidos
mismas dimensiones. Este resultado se puede aplicar a cualquier objeto sumergi-do, independientemente de su forma, tamaño o densidad.
Demostremos ahora de una manera más explícita que el valor de la fuerza deempuje es igual al peso del fluido desalojado. Aunque esto es cierto tanto para lí-quidos como para gases, realizaremos los cálculos para el caso de un líquido. Enlas caras laterales de la porción de líquido representado en la figura, las fuerzasdebidas a la presión que actúan horizontalmente se anulan entre sí, de maneraque la fuerza neta en la dirección horizontal es nula. En la porción de líquido, lapresión en su cara inferior es mayor que en la cara superior. Así, la fuerza ascen-dente Finf aplicada sobre la cara inferior del líquido considerado es mayor que lafuerza descendente Fsup aplicada sobre la cara superior. La resultante de todas lasfuerzas verticales ejercidas por el líquido restante (no consideramos el efecto dela fuerza gravitatoria pues no la ejerce el líquido restante) es∑
Flíq = B = Finf −Fsup .
Expresándolo en términos de la presión aplicando (5.6) obtenemos que
B = pinf A−psup A = ρfg∆h A ⇒ B = ρfgV
donde ρf es la densidad del líquido y V = A∆h es el volumen de la porción deliquido considerado. Como la masa de este líquido M = ρfV , vemos que B = M ges precisamente el peso del líquido desalojado.
Antes de seguir con algunos ejemplos, resulta interesante comparar dos casostípicos: la fuerza de empuje que actúa sobre un objeto completamente sumergidoy la que actúa sobre un objeto que está flotando.
(a) (b) (c)
FIGURA 5.3: (a) Un objeto completamente sumergido que sea menos denso que elfluido en el que está sumergido experimenta una fuerza neta ascendente. (b) Unobjeto completamente sumergido que sea más denso que el fluido, se hunde.(c) Un objeto que es menos denso que el agua flota sobre él, como este cubito dehielo en el agua.
Caso 1: Objeto completamente sumergido. Cuando un objeto de volumen Vo
está completamente sumergido en un líquido de densidad ρf, el módulo de lafuerza de empuje ascendente es B = ρfgVo. Como el objeto está totalmente su-mergido, el volumen del objeto y el volumen del líquido desalojado, V , es el mis-mo: V =Vo. Si el objeto tiene una densidad ρo, su peso es M g = ρoVog y, en con-secuencia, la fuerza neta (positiva si es ascendente) que actúa sobre él es∑
F = B −M g = (ρf −ρo)Vog . (5.8)
Podemos ver que, si la densidad del objeto es menor que la densidad del líqui-do, como en la Fig. 5.3(a), la fuerza neta es positiva y el objeto sufre una acele-ración ascendente. Si la densidad del objeto es mayor que la del líquido, como
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.3. Flotación. Principio de Arquímedes 149
en la Fig. 5.3(b), la fuerza neta es negativa y el objeto se hunde. Finalmente, si ladensidad del objeto y del líquido son iguales, la fuerza neta es cero y el cuerpopermanece sumergido a cierta profundidad sin hundirse (flotabilidad neutra).
El mismo comportamiento presenta un objeto sumergido en un gas, tal comoel aire de la atmósfera. Si el objeto es menos denso que el aire, como, por ejemplo,un globo de helio, el objeto flota y se eleva. Si es más denso, como una roca, cae.
Caso 2: Objeto flotante (parcialmente sumergido). Ahora consideremos un ob-jeto en equilibrio estático que está flotando sobre la superficie de un fluido, co-mo el cubito de hielo parcialmente sumergido que flota en el vaso de agua dela Fig. 5.3(c). Como sólo está sumergido parcialmente, el volumen V del fluidodesalojado es sólo una fracción del volumen total Vo del objeto. El volumen delfluido desalojado corresponde al volumen del objeto que está por debajo de lasuperficie libre del fluido. Al estar el objeto en equilibrio, la fuerza de empuje (as-cendente) se equilibrará con la fuerza gravitatoria (descendente) ejercida sobreel objeto. La fuerza de empuje tiene un valor B = ρfgV . Como el peso del obje-to es M g = ρoVog y debe cumplirse que
∑F = 0 en la dirección vertical, M g = B
encontramos finalmente que
ρfgV = ρogVo (5.9)
o bien
ρo
ρf= V
Vo. (5.10)
Así, la fracción del volumen del objeto que está bajo la superficie del fluido es igualal cociente entre la densidad del objeto y la del líquido. Es interesante notar quela expresión (5.9) nos dice igualmente que ρfV = ρoVo; esto es,
Masa fluido desalojado = Masa del objeto flotante .
Actividad 5.3:
¿Qué fuerza es responsable del empuje sobre el objeto sumergido enun fluido? ¿Por qué esta fuerza no tiene componentes en la direcciónlateral?
¿Por qué es tan difícil sumergir un globo inflado grande en el agua?
Una vez sumergido completamente, ¿es más difícil llevarlo a muchaprofundidad? Razone su respuesta.
¿Qué puede hacer un buceador que respira con una botella de airecomprimido para variar su profundidad si no pudiera usar sus aletas ymanos?
Si tenemos un hielo flotando en un vaso de agua lleno hasta el borde,al fundirse el hielo ¿rebosa el agua? Razone su respuesta.
Encuentre la manera de calcular la densidad de una pelota de ping-pong de radio r = 2,5cm que se encuentra sumergida en agua 10 cm yal soltarse salta sobre el agua una distancia de 3 cm.
JCM,FLML Apuntes de Física 1
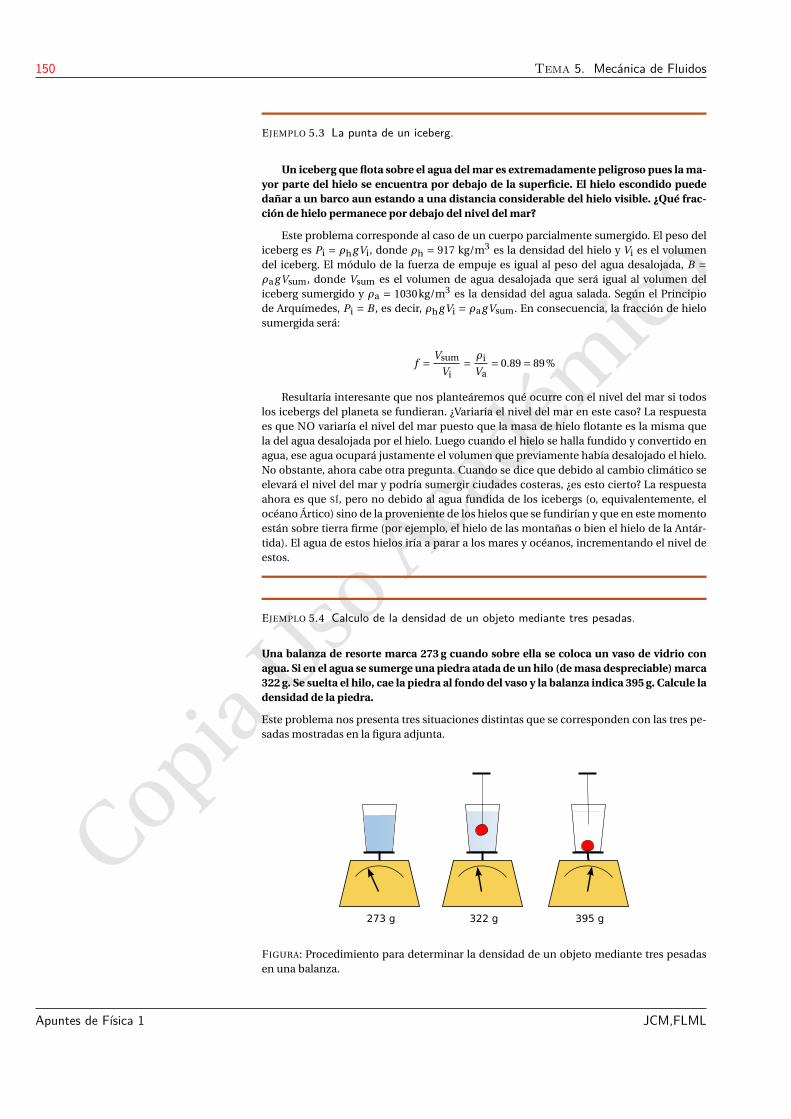
CopiaUso
Académico
150 Tema 5. Mecánica de Fluidos
EJEMPLO 5.3 La punta de un iceberg.
Un iceberg que flota sobre el agua del mar es extremadamente peligroso pues la ma-yor parte del hielo se encuentra por debajo de la superficie. El hielo escondido puededañar a un barco aun estando a una distancia considerable del hielo visible. ¿Qué frac-ción de hielo permanece por debajo del nivel del mar?
Este problema corresponde al caso de un cuerpo parcialmente sumergido. El peso deliceberg es Pi = ρhgVi, donde ρh = 917 kg/m3 es la densidad del hielo y Vi es el volumendel iceberg. El módulo de la fuerza de empuje es igual al peso del agua desalojada, B =ρagVsum, donde Vsum es el volumen de agua desalojada que será igual al volumen deliceberg sumergido y ρa = 1030kg/m3 es la densidad del agua salada. Según el Principiode Arquímedes, Pi = B , es decir, ρhgVi = ρagVsum. En consecuencia, la fracción de hielosumergida será:
f = Vsum
Vi= ρi
Va= 0.89 = 89%
Resultaría interesante que nos planteáremos qué ocurre con el nivel del mar si todoslos icebergs del planeta se fundieran. ¿Variaría el nivel del mar en este caso? La respuestaes que NO variaría el nivel del mar puesto que la masa de hielo flotante es la misma quela del agua desalojada por el hielo. Luego cuando el hielo se halla fundido y convertido enagua, ese agua ocupará justamente el volumen que previamente había desalojado el hielo.No obstante, ahora cabe otra pregunta. Cuando se dice que debido al cambio climático seelevará el nivel del mar y podría sumergir ciudades costeras, ¿es esto cierto? La respuestaahora es que SÍ, pero no debido al agua fundida de los icebergs (o, equivalentemente, elocéano Ártico) sino de la proveniente de los hielos que se fundirían y que en este momentoestán sobre tierra firme (por ejemplo, el hielo de las montañas o bien el hielo de la Antár-tida). El agua de estos hielos iría a parar a los mares y océanos, incrementando el nivel deestos.
EJEMPLO 5.4 Calculo de la densidad de un objeto mediante tres pesadas.
Una balanza de resorte marca 273 g cuando sobre ella se coloca un vaso de vidrio conagua. Si en el agua se sumerge una piedra atada de un hilo (de masa despreciable) marca322 g. Se suelta el hilo, cae la piedra al fondo del vaso y la balanza indica 395 g. Calcule ladensidad de la piedra.
Este problema nos presenta tres situaciones distintas que se corresponden con las tres pe-sadas mostradas en la figura adjunta.
273 g 322 g 395 g
FIGURA: Procedimiento para determinar la densidad de un objeto mediante tres pesadasen una balanza.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.4. Dinámica de Fluidos 151
En la primera pesada lo que medimos es la masa del fluido, por lo que podemos determinarque su peso es
Pf = mfg = 2730mN .
En la segunda pesada debemos considerar que ahora el fluido ejerce una fuerza de em-puje B sobre el objeto. Según nos dice la tercera ley de Newton, el objeto debe ejercer lamisma fuerza en dirección opuesta sobre el fluido. Por tanto, la fuerza normal, N , que ejer-
B B
ce la balanza sobre el fluido (es decir, lo que nos marca su medida) será la suma del pesodel fluido más esta fuerza de empuje. De aquí podemos deducir que la fuerza de empujeserá
B = (322−273)g = 490mN .
Pero el empuje también nos proporciona el volumen del objeto, Vo, puesto que
B = ρfgVo
y, por tanto,
Vo = B
ρfg= 0.49
1000 ·10= 49 ×10−6 m3 = 49cm3 .
Finalmente, en la tercera pesada, el objeto está en contacto también con la balanza, lo quenos proporciona directamente la masa del objeto más la masa del fluido. La masa del objetoserá mo = 395−273 = 122g, por lo que deducimos finalmente que la densidad del objeto es
ρo = mo
Vo= 122g
49cm3= 2.49g/cm3 .
Comentario histórico sobre el Principio de Arquímedes. El rey le había encargado a Ar-químedes (287–212 AC) la tarea de determinar si una corona fabricada para él estaba he-cha toda ella de oro o si, por el contrario, contenía algún metal más barato como la plata.El problema consistía en determinar la densidad de un objeto de forma irregular, sin des-truirlo. Según cuenta la leyenda, Arquímedes encontró la solución mientras se bañaba einmediatamente echó a correr desnudo por las calles de Siracusa gritando “¡Eureka!” (“¡Loencontré!”). La comprensión de este hecho precedió en 1900 años aproximadamente a lasLeyes de Newton (a partir de las cuales puede deducirse el principio de Arquímedes). Ar-químedes encontró un procedimiento simple y exacto para comparar la densidad de lacorona con la densidad del oro utilizando una balanza. Puso la balanza en el interior de unrecipiente y colocó la corona en un platillo y oro puro de igual masa en el otro. Entoncesañadió agua al recipiente hasta que quedaron sumergidos tanto la corona como el trozode oro puro. La balanza osciló elevando la corona, indicando así que el empuje que actua-ba sobre ésta era mayor que el que actuaba sobre el oro puro. Esto se debe a el volumendel agua desplazado por la corona era mayor que el desplazado por el oro puro. Concluyóentonces que la corona era menos densa que el oro puro (igual masa que el oro y mayorvolumen que éste).
5.4. Dinámica de Fluidos
Hasta aquí, nuestro estudio de los fluidos se ha limitado a los fluidos en reposoo fluidos estáticos. Ahora centraremos nuestra atención en los fluidos dinámicos,es decir, abordaremos el estudio de fluidos en movimiento. En lugar de estudiarel movimiento de cada una de las moléculas del fluido en función del tiempo,describiremos las propiedades del fluido de manera global.
5.4.1. Descripción del movimiento
Cuando un fluido está en movimiento, su flujo puede clasificarse en dos tiposdistintos: laminar o turbulento. Se dice que el flujo es estacionario o laminar si
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
152 Tema 5. Mecánica de Fluidos
cada partícula del fluido sigue una trayectoria bien definida; es decir, las trayecto-rias del fluido nunca se cruzan unas con otras sino que las partículas se desplazanen forma de capas o láminas, tal y como se muestra en la Fig. 5.4(a). Así, en unflujo estacionario, la velocidad del fluido en cada punto permanece constante a lolargo del tiempo.
Por encima de una cierta velocidad crítica, el flujo se vuelve turbulento. Elflujo turbulento es un flujo irregular, caracterizado por la presencia de regionescon pequeños remolinos o vórtices, como en la Fig. 5.4(b). A modo de ejemplo, elflujo del agua de un río se vuelve turbulento en las zonas en la que se encuentracon rocas u otros obstáculos, formando a menudo los denominados rápidos.
(a) (b)
FIGURA 5.4: (a) Flujo laminar alrededor de un ala en un túnel de aire. Las líneas deflujo del flujo de aire se hacen visibles utilizando partículas de humo. (b) Humoproveniente de un cigarrillo. El humo se mueve en primer lugar siguiendo unflujo laminar para transformarse en un flujo turbulento cuando asciende.
El término viscosidad se utiliza de manera común en el estudio del flujo de unfluido para caracterizar el grado de fricción interna en dicho fluido. Esta friccióninterna, o fuerza viscosa, está relacionada con la resistencia que ofrecen dos capasadyacentes del fluido a deplazarse una con respecto a la otra. Como la viscosidadrepresenta una fuerza no conservativa, parte de la energía cinética de un fluidoviscoso se convertirá en energía interna cuando las capas del fluidos deslizan unassobre otras. Este fenómeno es parecido al mecanismo por el cual un objeto quedesliza sobre una superficie horizontal rugosa, experimenta una transformaciónde energía cinética en calor.
Como el movimiento de un fluido real es muy complejo, vamos a utilizar unmodelo simplificado. Como veremos, muchas de las características de los fluidosreales en movimiento se pueden entender analizando el comportamiento de unfluido ideal. En nuestro modelo simplificado, asumiremos las siguientes propie-dades:
Fluido no viscoso En un fluido no viscoso se desprecia la energía interna. Un ob-jeto que se mueva dentro del fluido no experimentará ninguna fuerza vis-cosa.
Fluido incompresible Se asume que la densidad del fluido permanece constan-te, independientemente de la presión del fluido. Un gas no es incompresi-ble, por lo que, en consecuencia, no puede ser un fluido ideal.
Flujo laminar En un flujo laminar o estacionario, asumimos que la velocidad delfluido en todos sus puntos se mantiene constante a lo largo del tiempo.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.5. Ecuación de Bernoulli 153
Las dos primeras suposiciones de nuestro modelo simplificado son propie-dades de nuestro fluido ideal. La última es una descripción de la trayectoria delfluido.
5.4.2. Líneas de flujo y ecuación de continuidad para fluidos
La trayectoria que sigue una partícula de un fluido en condiciones de flujo la-minar se denomina línea de flujo. La velocidad de la partícula es siempre tangen-te a la línea de flujo, como se muestra en la figura. Dos líneas de flujo no puedencruzarse; si lo hicieran, una partícula podría moverse siguiendo cualquiera de lasdos trayectorias, creando puntos de cruce con otras partículas, y el flujo ya no se-ría laminar. Un conjunto de líneas de flujo, como las que se muestran en la figura,forman lo que se conoce como tubo de flujo. Las partículas del fluido no puedenentrar ni salir de los laterales de este tubo, ya que si lo hicieran, las líneas de flujose cruzarían.
Consideremos un fluido ideal que fluye a través de una tubería de secciónno uniforme, como la de la figura adyacente. Las particulas del fluido se mue-ven siguiendo una línea de flujo en estado estacionario. Cuando transcurre untiempo ∆t , el fluido en el extremo inferior de la tubería se mueve una distan-cia ∆x1 = v1∆t . Si la sección transversal de la tubería en esta región es A1, en-tonces la masa del fluido contenida en la región sombreada de la izquierda es∆m1 = ρA1∆x1 = ρA1v1∆t , donde ρ es la densidad (constante) del fluido ideal.Análogamente, el fluido que se mueve a través del extremo superior de la tuberíaen el tiempo ∆t tiene una masa ∆m2 = ρA2v2∆t . Como no se crea ni desaparecefluido entre A1 y A2 (es decir, no hay fuentes ni sumideros), la cantidad de fluidoque cruza A1 en un tiempo ∆t debe ser la misma que atraviesa A2 en ese mismointervalo de tiempo. Esto implica que ∆m1 =∆m2:
ρA1v1∆t = ρA2v2∆t (5.11)
o, equivalentemente,
A1v1 = A2v2 . (5.12) Ecuación de continuidad para fluidosincompresibles
La expresión anterior, llamada ecuación de continuidad para fluidos incom-presibles, establece que el producto del área por la velocidad de un fluido es cons-tante en todos los puntos de la tubería. De manera que la velocidad aumentacuando la tubería se estrecha. El producto Av , que tiene dimensiones de volumenpor unidad de tiempo, recibe el nombre de caudal volumétrico, o, simplemente,caudal:
I = ∆V
∆t= Av . (5.13) Caudal volumétrico
5.5. Ecuación de Bernoulli
Cuando un fluido se mueve por una región en la que su velocidad o su alturasobre la superficie horizontal del suelo se modifican, la presión en el fluido varíacon estos cambios. En 1738, el físico suizo D. Bernoulli obtuvo por primera vezuna expresión que relacionaba la presión con la velocidad y la altura de un fluidoideal.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
154 Tema 5. Mecánica de Fluidos
Consideremos el flujo de un fluido ideal a lo largo de una tubería de formano uniforme, como muestra la figura adyacente. Nuestro sistema será el fluidocomprendido en esta tubería entre las secciones 1 y 2, de áreas A1 y A2 respecti-vamente. Este fluido recorre en el tiempo∆t una distancia∆x1 en la parte inferiory ∆x2 en la superior. Llamemos porción 1 a la región de fluido sombreada inferiory porción 2 a la región sombreada superior. Estas regiones contienen la mismacantidad de fluido ∆m y también el mismo volumen ∆V (dado que la densidadno cambia). Debemos notar que el movimiento global de nuestro sistema en unintervalo∆t es equivalente a que la porción 1 de fluido se hubiese desplazado ha-cía el punto 2 dando lugar a la porción 2 (sin que hubiese ninguna variación en elresto del fluido entre los dos puntos).
Las fuerzas externas que actúan sobre nuestro sistema son dos: una de contac-to ejercida por el fluido externo (el que está en los trozos de tubería anteriores yposteriores a nuestro sistema) y otra de acción a distancia provocada por la gra-vedad. Si ahora aplicamos el teorema trabajo-energía cinética a nuestro sistema,teniendo en cuenta la presencia de los dos tipos anteriores de fuerzas externas,llegamos entonces a que
Wtotal ≡Wfluido +Wgrav =∆Ec . (5.14)
Debemos por tanto identificar los trabajos realizados por ambas fuerzas externas.Para ello notemos que la fuerza ejercida por el fluido externo sobre el ∆m situadoen la sección 1 tiene módulo F1 = p1 A1. El trabajo realizado por esta fuerza ex-terna durante el intervalo ∆t será W1 = F1∆x1 = p1 A1∆x1 = p1∆V , siendo ∆V elvolumen de la sección 1. Análogamente, el trabajo ejercido por el fluido externoen la sección 2 es, teniendo en cuenta que el volumen de las secciones 1 y 2 esel mismo, W2 = −p2 A2∆x2 = −p2∆V . El trabajo ahora es negativo porque estafuerza se opone al desplazamiento. Así, el trabajo neto realizado por estas fuerzasexternas de contacto sobre el sistema es
Wfluido = (p1 −p2)∆V . (5.15)
Por otra parte, el trabajo realizado por el campo gravitatorio conservativo sobre elsistema será igual a la disminución de la energía potencial de la cantidad de fluidodesplazado ∆m; esto es,
Wgrav =−∆Ep =∆mg (y1 − y2) . (5.16)
Análogamente, la variación de energía cinética del sistema del sistema vendrá da-da por
∆Ec = 1
2∆m(v2
2 − v21) .
Introduciendo ahora estos resultados en (5.14) obtenemos que
(p1 −p2)∆V +∆mg y1 −∆mg y2 = 1
2∆mv2
2 −1
2∆mv2
1 . (5.17)
Dividiendo cada término por ∆V y teniendo en cuenta que ρ = ∆m/∆V (que esconstante debido a la incompresibilidad del fluido), esta expresión se reduce a
p1 −p2 +ρg y1 −ρg y2 = 1
2ρv2
2 −1
2ρv2
1 (5.18)
que, al reagrupar términos, queda como
Ecuación de Bernoullip1 + 1
2ρv2
1 +ρg y1 = p2 + 1
2ρv2
2 +ρg y2 . (5.19)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.6. Aplicaciones de la ecuación de Bernoulli 155
Esta es la ecuación de Bernoulli aplicada a un fluido ideal. A veces, se expresatambién de la siguiente forma:
p + 1
2ρv2 +ρg y = Cte . (5.20)
Esta expresión nos dice que la suma de la presión (p) más la energía cinética porunidad de volumen ( 1
2ρv2) y más la energía potencial gravitatoria por unidad devolumen (ρg y) tiene el mismo valor en todos los puntos de una línea de flujo.Cuando el fluido está en reposo, v1 = v2 = 0, la ecuación (5.19) se transforma enp1 −p2 = ρg (y2 − y1), que coincide con la ecuación (5.5), como era de esperar.
Los gases no son incompresibles, por lo que no pueden describirse mediantela ecuación de Bernoulli. Sin embargo, el comportamiento cualitativo es similar:a medida que aumenta la velocidad del gas, su presión disminuye.
Actividad 5.4:
El filtro que suele venir en un grifo de cocina, ¿hace que el flujo delagua sea laminar o turbulento?
Enumere algunas razones por las que el estudio de un flujo turbulentoes más complicado que el de un flujo laminar.
¿Es la viscosidad responsable de que un flujo deje de ser laminar?
La condición de continuidad dada en (5.12) no es necesariamente vá-lida para flujos turbulento. ¿Verdadero o Falso? Razone su respuesta.
¿Puede aplicarse la ecuación de continuidad a gases? Razone su res-puesta.
En un flujo laminar que se mueve en una tubería, identifique con cla-ridad las fuerzas que actúan sobre una porción de fluido y de qué tiposon.
¿Qué tipo de fuerza (contacto/acción a distancia) produce el trabajo(p1 −p2)∆V ? ¿Es conservativa?
Identifique con claridad las condiciones que nos permiten obtener laecuación de Bernoulli.
Describa por qué es interesante expresar la ecuación de Bernoulli enla forma (5.20) y su relación con la conservación de la energía.
5.6. Aplicaciones de la ecuación de Bernoulli
5.6.1. Teorema de Torricelli
Consideremos un depósito de sección transversal A1 lleno hasta una altura hde un líquido de densidad ρ. El aire sobre la superficie del líquido está a una pre-sión p0 y el líquido sale por un orificio de sección A2. Sean v2 la velocidad desalida (en el punto 2) y v1 la velocidad en el punto 1. Tomando el punto 2 comonivel de referencia, tenemos, aplicando la ecuación de Bernoulli (5.19)
p0 + 1
2ρv2
1 +ρg h = patm + 1
2ρv2
2
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
156 Tema 5. Mecánica de Fluidos
llegamos a que
v22 = v2
1 +2p0 −patm
ρ+2g h . (5.21)
Por otro lado, por la ecuación de continuidad (5.12) sabemos también que
v2 = A1
A2v1
Si ahora suponemos además que A2 ¿ A1 (es decir, el orificio tiene un área muchomenor que la superficie del líquido), entonces, v2
1 ¿ v22 , y (5.21) puede escribirse
de la forma
v22 = 1
1− (A2/A1)2
[2
p0 −patm
ρ+2g h
]≈ 2
p0 −patm
ρ+2g h . (5.22)
Si finalmente consideramos el caso en que el depósito está abierto a la atmósferaresulta que p0 = patm, por lo que (5.22) se transforma en
v2 ≈√
2g h . (5.23)
Es decir, la velocidad de salida de un líquido por un orificio practicado en elfondo de un depósito grande es la misma que la de un objeto en caída libre desdela superficie libre del líquido. Este resultado se conoce como el teorema de Torri-celli. Es válido también para un orificio situado en la pared a una profundidad hpor debajo de la superficie superior del líquido.
5.6.2. Efecto Venturi
Si consideramos un estrechamiento producido en un tubo como el de la figuray aplicamos la ecuación de Bernoulli (5.19) a las partes ancha y estrecha del tuboencontramos que
p1 + 1
2ρv2
1 = p2 + 1
2ρv2
2 (5.24)
ya que los puntos 1 y 2 están a la misma altura. Ahora bien, según la ecuación decontinuidad v2 > v1, y, en consecuencia, p2 < p1. Es decir, cuando aumenta la ve-locidad de un fluido, desciende la presión. Este resultado se conoce como efectoVenturi. La ecuación (5.24) es un resultado importante que se aplica en muchassituaciones donde pueden ignorarse los cambios de altura. En la figura adyacen-te se representan las líneas de flujo del fluido. La distancia entre ellas denota lavelocidad del fluido. Cuanto menor es el espacio entre líneas, mayor es la veloci-dad. En el flujo horizontal, cuando la velocidad aumenta, la presión disminuye,por lo que cuando las líneas de flujo se juntan, la presión disminuye. Veamos acontinuación algunas aplicaciones del efecto Venturi.
El venturímetro
El venturímetro es un aparato para medir la velocidad de un fluido. Un fluidode densidadρf pasa a través de una tubería de sección transversal A1 que posee unestrechamiento de sección A2. Las dos partes de la conducción están conectadaspor un manómetro en forma de U, parcialmente lleno de líquido de densidad ρL.Como la velocidad de flujo es mayor en el estrechamiento, la presión en esta sec-ción es menor que en la parte más ancha de la tubería. La diferencia de presiónviene medida por la diferencia ∆h de los niveles de líquido en el tubo en U. A par-tir de este valor se puede determinar la velocidad del fluido en la zona ancha oestrecha.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.6. Aplicaciones de la ecuación de Bernoulli 157
Para ello partimos de la ecuación (5.24):
p1 + 1
2ρfv
21 = p2 + 1
2ρfv
22
y de la ecuación de continuidad (5.12):
v2 =Rv1, R ≡ A1
A2.
A partir de estas ecuaciones se obtiene
p1 −p2 = 1
2ρf(R
2 −1)v21 . (5.25)
Por otro lado, podemos aplicar de nuevo la ecuación de Bernoulli al tubo en Upara obtener (tenemos en cuenta que en el interior del tubo el fluido es estático yque las tuberías por las que fluye el fluido no son muy anchas)
p1 +ρLg h1 +ρfg H1 = p2 +ρLg h2 +ρfg H2
que podemos reescribir como
p1 −p2 = ρLg (h2 −h1)−ρfg (H2 −H1)
= ρLg∆h −ρfg∆h = (ρL −ρf)g∆h . (5.26)
Igualando las ecuaciones (5.25 y 5.26) y despejando v1 en función de ∆h se tienefinalmente que
v1 =√
2(ρL −ρf)g∆h
ρf(R2 −1). (5.27)
Pulverizadores
Muchos aparatos funcionan de forma similar al pulverizador de la figura. Unacorriente de aire que fluye por encima del tubo inmerso en el líquido reduce lapresión en la parte superior del tubo. Esta reducción de la presión provoca que ellíquido ascienda y se una a la corriente de aire. Entonces el líquido se dispersa yse pulveriza. Este sistema es el que utilizan los botes de perfume o los esprays. Elmismo principio se utiliza en el carburador de un motor de gasolina. En este caso,la región de baja presión en el carburador se produce por aire introducido por elpistón a través del filtro de aire. La gasolina se pulveriza en esa región, mezclán-dose con el aire, y entrando finalmente en el cilindro del motor, donde tiene lugarla combustión.
Sustentación del ala de un avión
La figura muestra las líneas de flujo alrededor de un corte del ala de un aviónque se mueve a cierta velocidad con respecto al aire circundante. Debido a la for-ma y/o inclinación del ala, las líneas de flujo se concentran por encima de esta, loque corresponde a una mayor velocidad del flujo y, por efecto Venturi, a una pre-sión reducida en esa región. La fuerza que actúa hacia arriba en la parte inferiordel ala es mayor que la actúa hacia abajo sobre la parte superior; hay entoncesuna fuerza neta hacia arriba, llamada sustentación. La sustentación no se debesólo al impulso del aire que incide bajo el ala; de hecho, la presión reducida en lasuperficie superior es lo que más contribuye a la sustentación. Si el ala se encuen-tra muy inclinada, la velocidad del flujo de aire en la superficie superior puede ser
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
158 Tema 5. Mecánica de Fluidos
muy alta, llegando a producirse turbulencias, como veremos al final del tema; es-to hace que la diferencia de presión a lo largo del ala no sea tan alta como predicela ecuación de Bernoulli. En un caso extremo, esta turbulencia puede hacer queel avión pierda sustentación bruscamente.
Se observa un patrón de flujo y una fuerza similar en las inmediaciones decualquier objeto saliente cuando hace viento. Por ejemplo, la fuerza de susten-tación que actúa sobre un paraguas abierto puede hacer que éste se doble haciaarriba en situaciones de viento intenso. Esta fuerza de “sustentación” también esresponsable del movimiento de las aspas de un aerogenerador de viento. Estasaspas se diseñan con procedimientos análogos a los de las alas de los aviones,buscando en este caso que se provoque un movimiento de rotación muy eficien-te de las mismas. Igualmente encontramos una fuerza de sustentación sobre unautomóvil que va a gran velocidad porque el aire se mueve sobre el techo curvodel vehículo. Esa sustentación puede disminuir la tracción de los neumáticos, y espor ello que muchos coches están equipados con un spoiler aerodinámico en laparte trasera. El spoiler es similar a un ala invertida y hace que una fuerza haciaabajo actúe sobre las ruedas traseras.
Actividad 5.5:
Intente explicar por qué la cortina de la ducha tiende a pegarse al cuer-po cuando nos estamos duchando.
¿Qué fallaba en el argumento de muchos hombres de ciencia antiguosque suponían que nunca podría volar un objeto cuya densidad mediafuese mayor que el aire? [Note que un objeto en el agua solo flota si ladensidad media del objeto es menor que la del agua.]
Explique físicamente cómo podemos sacar agua de un depósito queestá abierto por su parte superior si solo disponemos de una goma.
Las explicaciones y resultados que se han obtenido en los ejemplosmostrados en esta sección puede que no se ajusten a muchas situacio-nes reales en las que se dan esos ejemplos. Explique las razones.
5.7. Viscosidad y turbulencia
Hasta ahora hemos supuesto que el fluido bajo estudio es no viscoso y que su flujoera laminar. Aunque en muchos casos esos supuestos son válidos, existen muchassituaciones físicas importantes en las que los efectos de la viscosidad (fricción in-terna) y la turbulencia (flujo no laminar) son extremadamente importantes. Exa-minaremos brevemente algunas de esas situaciones.
5.7.1. Flujo viscoso
La viscosidad es la fricción interna de un fluido. Las fuerzas viscosas se oponen almovimiento relativo entre dos porciones de fluido. La viscosidad hace que cuestetrabajo remar en una barca con aguas tranquilas, pero también es lo que hace quefuncione el remo. Los efectos viscosos son importantes en el flujo de fluidos en lastuberías, en el flujo de la sangre, en la lubricación de las partes de un motor y enmuchas otras situaciones.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.7. Viscosidad y turbulencia 159
Los fluidos que fluyen con facilidad, como el agua y la gasolina, tienen menorviscosidad que los líquidos espesos como la miel o el aceite. Las viscosidades detodos los fluidos dependen mucho de la temperatura, aumentan para los gases ydisminuyen para los líquidos al subir la temperatura (por ejemplo, la lava de unvolcán fluye debido a la alta temperatura a la que se encuentra).
Un fluido viscoso tiende a adherirse a una superficie sólida que está en con-tacto con ella. Hay una capa de frontera delgada de fluido cerca de la superficie,en la que el fluido está casi en reposo respecto a ella. Debido a ello, las partículasde polvo pueden adherirse al aspa de un ventilador aun cuando este esté girandorápidamente, y también que no podamos limpiar bien un coche con sólo dirigirel chorro de agua de una manguera hacia él.
De acuerdo con la ecuación de Bernoulli, si un fluido fluye estacionariamentepor una tubería horizontal estrecha y de sección transversal constante, la presiónserá constante a lo largo de la tubería. En la práctica, se observa una caída de pre-sión o pérdida de carga a medida que nos desplazamos en la dirección del flujo.Considerando este fenómeno de otro modo, podemos ver que se requiere una di- En un fluido viscoso se requiere una
diferencia de presión para empujar yconseguir la circulación de un fluidoa través de un tubo horizontal.
ferencia de presión para empujar y conseguir la circulación de un fluido a travésde un tubo horizontal. Es necesaria esta diferencia de presión a causa de la fuer-za de resistencia o frenado que ejerce el tubo sobre la capa de fluido que está encontacto con él y de la fuerza de arrastre que ejerce cada capa de fluido sobre laadyacente que se está moviendo con distinta velocidad. Estas fuerzas de arrastreo de resistencia se denominan fuerzas viscosas. Como resultado de su presencia,la velocidad de un fluido tampoco es constante a lo largo del diámetro de la tu-bería siendo mayor en su centro y cero en donde el fluido entra en contacto conlas paredes de la misma. El movimiento es semejante a muchos tubos concéntri-cos que se deslizan unos respecto a otros, con el tubo central moviéndose másrápidamente y el más exterior en reposo. Las fuerzas viscosas entre los tubos seoponen a este deslizamiento; si queremos mantener el flujo, debemos aplicar unamayor presión detrás del flujo que delante de él. Es por ello que necesitamos se-guir apretando un tubo de pasta dentífrica o una bolsa de ketchup (ambos fluidosviscosos) para que siga saliendo fluido del envase. Los dedos aplican detrás delflujo una presión mucho mayor que la atmosférica al frente del flujo.
Según muestra la figura, en un fluido viscoso sea p1 la presión en el punto1 y p2 la presión en el punto 2 situado a una distancia L del anterior (siguiendola dirección de la corriente). Experimentalmente se encuentra que, en múltiplessituaciones, la pérdida de carga Q ≡∆p = p1−p2 es proporcional al caudal I = Av ,
Q ≡∆p = RI , (5.28)
siendo la constante de proporcionalidad R la resistencia al flujo, que depende dela longitud L del tubo, de su radio r y de la viscosidad del flujo.
Si identificamos la pérdida de carga, Q, con la energía por unidad de volumendisipada por rozamiento interno, podemos reescribir la ecuación de Bernoulli demodo que pueda usarse para flujos viscosos. En este caso tendremos que
Ecuación de Bernoulli paraflujo viscosop1 + 1
2ρv2
1 +ρg y1 = p2 + 1
2ρv2
2 +ρg y2 +Q . (5.29)
A continuación definiremos el coeficiente de viscosidad de un fluido. En la fi-gura se muestra un fluido confinado entre dos placas paralelas, cada una de ellasde área A y separadas por una distancia z. Manteniendo la placa inferior en repo-so, se tira de la placa superior con velocidad constante v mediante una fuerza F .Es necesario ejercer esta fuerza para tirar de la placa superior porque el fluido
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
160 Tema 5. Mecánica de Fluidos
Fluido Temperatura η
ºC (mPa·s)Agua 0 1.80
20 1.0060 0.65
Sangre 37 4.00Aceite para motores 30 200.00Petróleo 20 986.00Glicerina 0 10000.00
20 1410.0060 81.00
Aire 20 0.018
Cuadro 5.1: Coeficientes de Viscosidad
próximo a la placa ejerce una fuerza viscosa de resistencia que se opone al mo-vimiento. La velocidad del fluido entre las placas es prácticamente igual a v enun lugar próximo a la placa superior y próxima a cero cerca de la placa inferior,y varía linealmente con la distancia entre las placas. La fuerza F puede conside-rarse que es directamente proporcional a v y A e inversamente proporcional a laseparación z de las placas:
F = ηv A
z(5.30)
donde la constante de proporcionalidad η es el coeficiente de viscosidad. Cuan-
Fluido newtoniano
do se cumple esta relación de proporcionalidad, se dice que el fluido es newto-niano.
La unidad de viscosidad en el S.I. es el Pa·s. Una unidad antigua del sistemacgs, pero de uso poco común, es el poise. Estas unidades están relacionadas por
1 Pa · s = 10 poise .
En el cuadro 5.1 se muestran los coeficientes de viscosidad de varios fluidos adiferentes temperaturas. En general, la viscosidad de un líquido aumenta cuandodisminuye la temperatura.
Ley de Poiseuille
Se puede demostrar que para un fluido newtoniano en flujo laminar en untubo circular de radio r , la resistencia R a la circulación de un fluido que apareceen la ecuación (5.28) viene dada por
R = 8ηL
πr 4 . (5.31)
Las ecuaciones (5.28) y (5.31) se pueden combinar para obtener la siguienteexpresión para la pérdida de carga en un tubo circular de radio r y longitud L:
Q = 8ηL
πr 4 I . (5.32)
La ecuación anterior recibe el nombre de ley de Poiseuille. Obsérvese la depen-
Ley de Poiseuillle
dencia con el radio del tipo 1/r 4 en la pérdida de carga. Si se divide por la mitadel radio del tubo, la pérdida de carga para un flujo de volumen y viscosidad dados
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
5.7. Viscosidad y turbulencia 161
aumenta en un factor 16; esto es, se necesitaría una presión 16 veces mayor pa-ra impulsar el fluido en el tubo con el mismo flujo de volumen. Esto explica, porejemplo, que si por alguna razón se reduce el diámetro de los vasos sanguíneos, lapresión sanguínea debe subir considerablemente para mantener el mismo flujode volumen.
Dado que la ley de Poiseuille se aplica sólo al flujo laminar de un fluido new-toniano (es decir, a un fluido cuya viscosidad es constante e independiente desu velocidad), esta ley no pude aplicarse directamente a la sangre. La sangre esun fluido complejo formado por partículas sólidas de diferentes formas suspen-didas en un líquido. Por ejemplo, los glóbulos rojos son corpúsculos en forma dedisco que están orientados al azar a velocidades bajas pero que, a velocidades al-tas, tienden a orientarse para facilitar el flujo. Así pues, la viscosidad de la sangredisminuye cuando aumenta la velocidad del flujo, de modo que no puede consi-derarse un fluido newtoniano. Por tanto, la Ley de Poiseuille no es estrictamenteválida para describir el flujo sanguíneo, aunque dicha ley es una aproximaciónmuy útil cuando para obtener una descripción cualitativa.
Actividad 5.6:
¿Podríamos nadar en el agua si ésta no fuese algo viscosa? Razone surespuesta.
¿Por qué se requiere una diferencia de presión para que el agua circulepor una tubería horizontal?
La velocidad del agua que circula por una tubería en flujo laminar noes homogénea en toda la sección, tendiendo a cero en la parte en con-tacto con la tubería. Explique las razones de ello.
¿Por qué debemos seguir apretando una jeringuilla para que el líquidode su interior siga saliendo por la aguja?
Describa diversas situaciones físicas comunes donde los fluidos sufrenuna evidente “pérdida de carga.”
¿Qué implicaciones prácticas tiene que la resistencia al flujo de un flui-do newtoniano en régimen laminar sea inversamente proporcional ala cuarta potencia del radio de la tubería?
5.7.2. Flujo turbulento
Si la velocidad de un fluido excede cierto valor crítico, el flujo deja de ser la-minar. El patrón de flujo se vuelve muy irregular y complejo, y cambia continua-mente con el tiempo; no hay un patrón de estado estacionario. Este flujo irregulary caótico se denomina turbulencia. La Figura 5.4 muestra el contraste entre flu-jo laminar y turbulento. La ecuación de Bernoulli no es aplicable a regiones deturbulencia, pues el flujo no es estacionario.
El que un flujo sea laminar o bien turbulento depende en parte de la viscosi-dad del fluido. Cuanto mayor es la viscosidad, mayor es la tendencia del fluido afluir en capas y es más probable que el flujo sea laminar. Para un fluido viscoso, Cuanto mayor es la viscosidad, mayor
es la tendencia del fluido a fluir encapas y es más probable que el flujosea laminar
la velocidad del flujo es un factor determinante. Un patrón de flujo que es establea velocidad baja se vuelve inestable de repente cuando se alcanza una velocidadcrítica. Las irregularidades en el patrón de flujo pueden deberse a asperezas en la
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
162 Tema 5. Mecánica de Fluidos
pared del tubo, variaciones en la densidad del fluido y muchos otros factores. Si lavelocidad de flujo es baja, estas perturbaciones se eliminan por amortiguamiento;el patrón de flujo es estable y tiende a mantener su naturaleza laminar. Cuando sealcanza la velocidad crítica, el patrón de flujo se hace inestable; las perturbacionesya no se amortiguan, sino que crecen hasta destruir el patrón de flujo laminar. Elflujo normal de sangre en la aorta humana es laminar, pero una alteración peque-ña, como una patología cardíaca, puede hacer que el flujo se vuelva turbulento. Laturbulencia hace ruido; por ello, escuchar el flujo sanguíneo con un estetoscopioes un procedimiento de diagnóstico útil.
Como consecuencia de lo anteriormente expuesto, queda claro que la veloci-dad crítica que separa los regímenes laminar y turbulento depende de la densidady viscosidad del fluido, así como de la geometría del conducto. En el caso de unatubería circular de radio r , el flujo puede caracterizarse mediante un número adi-mensional denominado Número de Reynolds, que se define como
Número de Reynolds NR = 2rρv
η(5.33)
donde v es la velocidad media del fluido. Los experimentos demuestran que elflujo es laminar si el número de Reynolds es inferior a 2000 y es turbulento si esmayor que 3000. Entre estos valores el flujo es inestable y puede variar de un tipode flujo a otro.
Actividad 5.7:
¿Puede aplicarse la ecuación de Bernoulli (con su variante que incluyepérdida de carga) a un flujo turbulento? Razone la respuesta.
¿Influye la viscosidad en el régimen de un fluido?
Si un fluido tiene un número de Reynolds de 1409 ¿su régimen es la-minar o turbulento?
Muchos de los resultados que hemos obtenido anteriormente han su-puesto implícitamente que el flujo era laminar. ¿Tienen alguna validezpara el caso de flujos turbulentos? Razone su respuesta.
5.8. Problemas propuestos
Estática de fluidos
5.1: Dos cubos de idéntico tamaño, uno de plomo y otro de aluminio (la densidad del plomo es mayorque la del alumnio, y las dos son mayores que la densidad del agua), están suspendidos a diferentesprofundidades por medio de dos alambres en un estanque de agua. a) ¿Cuál de ellos experimenta unamayor fuerza de flotación (empuje)? b) ¿En qué cubo es mayor la tensión en el alambre? c) ¿Cuál deellos experimenta una mayor fuerza sobre su cara inferior? d) ¿Para cuál de ellos es mayor la diferenciade presiones entre la cara superior e inferior?Sol.: (a) Idéntica. (b) Plomo. (c) Plomo. (d) Idéntica.
5.2: Para poder respirar, un ser humano necesita que la diferencia de presiones entre el exterior y elinterior de sus pulmones sea de menos de 0.05 atmósferas. ¿A qué profundidad máxima puede nadarun buceador que respire por medio de un tubo largo (snorkel)?Sol.: 0.5 m.
5.3: Una balanza de resorte marca 273 g cuando de ella cuelga un vaso de vidrio con agua. Si en elagua se sumerge una piedra atada de un hilo (de masa despreciable) marca 322 g. Se suelta el hilo, cae
Apuntes de Física 1 JCM,FLML
CopiaUso
Académico
5.8. Problemas propuestos 163
la piedra al fondo del vaso y la balanza indica 395 g. Calcule la densidad de la piedra.Sol.: ρ = 2.49g/cm3.
5.4: Ejemplo 13.6 Tipler. El porcentaje de grasa corporal de una persona puede estimarse midiendola densidad de su cuerpo, y teniendo en cuenta que la densidad de la grasa es, aproximadamente, deρg = 0.9× 103 kg/m3, y la densidad del tejido magro (todo el resto aproximadamente salvo la grasa)
ρm = 1.1×103 kg/m3. Si el peso aparente de una persona sumergida completamente en agua, una vezque ha exhalado completamente el aire de sus pulmones es el 5% de su peso, calcule su porcentaje degrasa corporal. Si suponemos que es un hombre de 30 años, consultar en Internet los valores típicospara saber si está gordo o delgado.Sol. Densidad de dicha persona: ρp = 1,05×103 kg/m3.Porcentaje de grasa, fg = ρg (ρm −ρp )/[ρp (ρm −ρg )] ≡ 21%.
5.5: La densidad de una disolución de sal varía con la profundidad h de la forma ρ = ρ0 + Ah, siendoρ0 = 1g/cm3 y A = 0.02g/cm4 (h en cm). (a) Calcule a qué profundidad se encontrará en equilibrio unabolita de volumen V1 = 0.1cm3 y masa m1 = 0.13g. (b) ¿Cuál es la presión relativa a dicha profundidad?(c) Mediante un hilo se une la bolita anterior a otra de volumen V2 = 0.2cm3 y masa m2 = 0.34g. Seintroducen en la disolución y se encuentra que en el equilibrio la primera bolita se halla a una profun-didad h1 = 20 cm. Calcular la longitud L del hilo que une entre sí las bolitas.Sol.: (a) h = 15cm. (b) ∆p = 1.5Pa. (c) L = 12.5cm.
5.6: Un globo lleno de Helio se ata con una cuerda al suelo de un vagón (un globo de He flota en elaire. Suponga que la tensión del hilo es prácticamente despreciable). Otro globo lleno de agua se ata altecho como se indica en la figura (evidentemente este globo no flota). El vagón comienza a moverse conuna aceleración a hacia la derecha. Calcule el ángulo de inclinación θ para cada globo en su posiciónde equilibrio e indique si se inclina a la derecha/izquierda. Nota: Recordar que el aire es un fluido, y
He
Agua
a
que ρHe ≈ 0.15ρaire y ρagua ≈ 1000ρaire. Además tenga en cuenta que la fuerza de empuje siempre serámayor que la tensión en la cuerda.Sol.: (a) Globo agua: θ = arctan(a/g ) hacia la izquierda. (b) Globo He: θ = arctan(a/g ) hacia la derecha.
5.7: Un sólido en forma de prisma, de altura h y base A se encuentra sumergido entre dos fluidos,aceite con densidad ρC =0,9 g/cm3 y agua de densidad ρA =1,0 g/cm3, siendo h1 la altura que está
Agua
Aceite
dentro del aceite. (a) Obtenga la densidad del sólido, ρS, en función de h,h1,ρC,ρA y de la aceleraciónde la gravedad g (no sustituir valores numéricos). (b) Calcule las presiones absolutas sobre las carassuperior e inferior así como las fuerzas que la presión ejerce sobre ellas si A = 800 cm2, hC = 100cm,h = 50cm y h1 = 30 cm. Tome g = 10 m/s2 y 1atm=105 Pa.Sol.: (a) ρS = ρA − (ρA −ρC)h1/h; (b) psup = 106300Pa, pinf = 111000.
Dinámica de fluidos
5.8: Un submarinista practicando la pesca submarina clava accidentalmente el arpón en su barca,abriendo un pequeño orificio que se encuentra situado 30 cm por debajo de la superficie del agua. ¿Aqué velocidad entrará el agua en la barca a través del orificio? (Suponer que el agua se comporta, enestas circunstancias, como un fluido ideal)Sol.: v = 2.45m/s.
5.9: Dos globos de He flotan uno junto al otro con las cuerdas sujetas a una barra. La separación en-tre los globos es muy pequeña (1 ó 2 cm). Si soplamos en la zona que separa los dos globos, ¿qué lesocurrirá?: (a) Se acercan. (b) Se separan. (c) No se ven afectados. Justificar brevemente las respuestas.
5.10: En una conducción de agua de 2.5 cm2, hay un estrechamiento de 1 cm2. Determine la diferen-cia de altura, ∆h, entre las columnas de agua de los tubos manométricos si por la conducción fluye
��������������
��������������
�������������
�������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������agua a razón de 9 l/min y se desprecian las pérdidas.
Sol.: ∆h ≈ 9cm .
5.11: Dos tanques abiertos muy grandes A y F contienen el mismo líquido. Un tubo horizontal BC D ,con un estrechamiento en C y abierto al aire en D , sale del fondo del tanque A. Un tubo vertical E seune al tramo C y baja al depósito F , como indica la figura. La sección en C es la mitad que en D , y Destá a una distancia h1 por debajo del líquido en A. Suponiendo que el fluido se comporta como unfluido ideal, ¿A qué altura h2 subirá el líquido en el tubo E? Expresar la respuesta en términos de h1 y,si hiciera falta, despreciar la densidad del aire frente a la del fluido.Sol.: h2 = 3h1 .
5.12: Un tanque cilíndrico vetrical cerrado y elevado con diámetro de 2 m contiene agua que alcan-za una profundiad de 0,8 m. Accidentalmente un trabajador hace un orificio circular de diámetro 2 cmen la parte inferior del tanque. A medida que el agua sale del tanque, el aire comprimido situado porencima del agua en el tanque mantiene una presión manométrica de 5000Pa en la superficie del agua.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
164 Tema 5. Mecánica de Fluidos
Ignore los efectos de la viscosidad. (a) Inmediatamente después de perforar el tanque, ¿cuál es la velo-cidad con que el agua sale del agujero? ¿Cuál es la razón entre esta velocidad y la velocidad del agua ala salida, si la parte superior del tanque estuviera abierta al aire? (b) Cuestión avanzada: ¿Cuánto tiem-po se necesita para que salga toda el agua del tanque cerrado? ¿Cuál es la razón entre este tiempo y eltiempo que tardaría en vaciarse, si la parte superior del tanque estuviera abierta al aire?Sol.: (a) v = 5.1m/s, v = 4m/s (deposito abierto).
5.13: Se tienen dos depósitos A y B muy grandes a distinta altura comunicados por una tubería como
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
A
L
B3
L/3 L/3 L/3
2
1
H
α
se indica en la figura. Calcule: (a) las velocidades en las secciones S1,S2 y S3 de 5, 4 y 3 cm2, respec-tivamente; (b) las alturas a que llegaría el agua en S1 y S2 si en dichas secciones se practican sendosorificios y se colocan tubos verticales. Datos: H = 8 m; L = 10 m; α= 30º. Desprecie las pérdidas debidasa la viscosidad.Sol.: (a) v1 = 7.52m/s, v2 = 9.4m/s, v3 = 12.52m/s.(b) h1 = 127cm, h2 = 157cm.
5.14: La sangre que circula por una aorta de 1 cm de radio va a una velocidad de 30 cm/s. Suponiendoque la sangre tiene una viscosidad de 4 mPa·s y una densidad de 1060 kg/m3, estimar si el flujo serálaminar o turbulento. Nota: Esto es simplemente una estimación, ya que la sangre es un fluido bastante“peculiar” (busque por Internet información al respecto).Sol.: NR = 1590, flujo aproximadamente laminar.
5.15: En el supuesto del problema anterior (flujo laminar), si una placa de ateroma en las paredesarteriales reduce su radio efectivo en un 10%, ¿en qué porcentaje se reduce el flujo sanguíneo?Sol.: El caudal se reduce en un 65%.
5.16: Resuelva las siguientes cuestiones teniendo en cuenta la ley de Poiseuille
I = πr 4∆p
8ηL
donde I es el volumen de fluido por unidad de tiempo (caudal), ∆p es la diferencia de presión en unatubería de radio r y longitud L, y para el agua la viscosidad es η = 1mPa·s. Se desea expulsar 2 cm3 deagua fuera de una jeringa de 1 cm de diámetro a través de una aguja de calibre 15 (diámetro interior dela aguja = 1,37mm) y 3.5 cm de longitud en 0.4 s. (a): ¿Cuál debe ser la diferencia de presión entre lapunta de la aguja y el extremo conectado a la jeringa? (b): ¿Qué fuerza debe aplicarse al émbolo de laaguja? (c): ¿Con qué velocidad saldría el agua por la aguja de la jeringa?Sol.: (a) ∆p = 2024Pa; (b) F = 0.16 N; (c) v = 3.4m/s.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
TEMA 6
Ondas mecánicas
6.1. Introducción
En la Naturaleza existen muchos fenómenos físicos en los que una perturba-ción física viaja sin que ello lleve aparejado un desplazamiento neto de materia.Un ejemplo de esto puede ser la ola que se produce en el agua tras arrojar unapiedra. En este fenómeno se observa el desplazamiento de una ondulación en lasuperficie del agua en la que las partículas individuales de agua no viajan sino querealizan un simple movimiento de vaivén (movimiento oscilatorio). Otro ejemplo,es la propagación del sonido, que básicamente es un desplazamiento de un cam-bio de presión en el aire pero sin que ello implique que las partículas de aire viajendesde el lugar donde se originó el sonido hasta el receptor; más bien cada partícu-la transmite su movimiento oscilatorio a la siguiente antes de volver a su posiciónoriginal. Otro ejemplo bastante visual de este tipo de fenómenos se produce alagitar una cuerda por uno de sus extremos. En este caso se observaría claramenteel desplazamiento de un pulso en la cuerda, siendo también evidente que cadasegmento de cuerda no viaja junto a este pulso.
En todos los ejemplos anteriores una perturbación física se desplaza a travésde un medio (agua, aire y cuerda respectivamente) sin que las partículas de estemedio hayan sufrido un desplazamiento neto.1 Estos ejemplos son casos concre-tos de un tipo general de fenómenos físicos denominados ondas, las cuales pue-den definirse como
Propagación de una perturbación física sin que exista untransporte neto de materia.
Debe notarse que la propagación de la perturbación en la onda implica el trans-porte de cierta energía y momento lineal. En este sentido, el comportamientoondulatorio debe discernirse claramente del comportamiento de las partículas,puesto que estas últimas siempre transportan energía y momento lineal asociadoa un transporte neto de materia.
1 Debe notarse que la ausencia de un desplazamiento neto no implica la existencia de movimientonulo. El movimiento oscilatorio de una partícula en torno a un punto fijo es un claro ejemplo demovimiento en el cual no existe traslación neta.
165
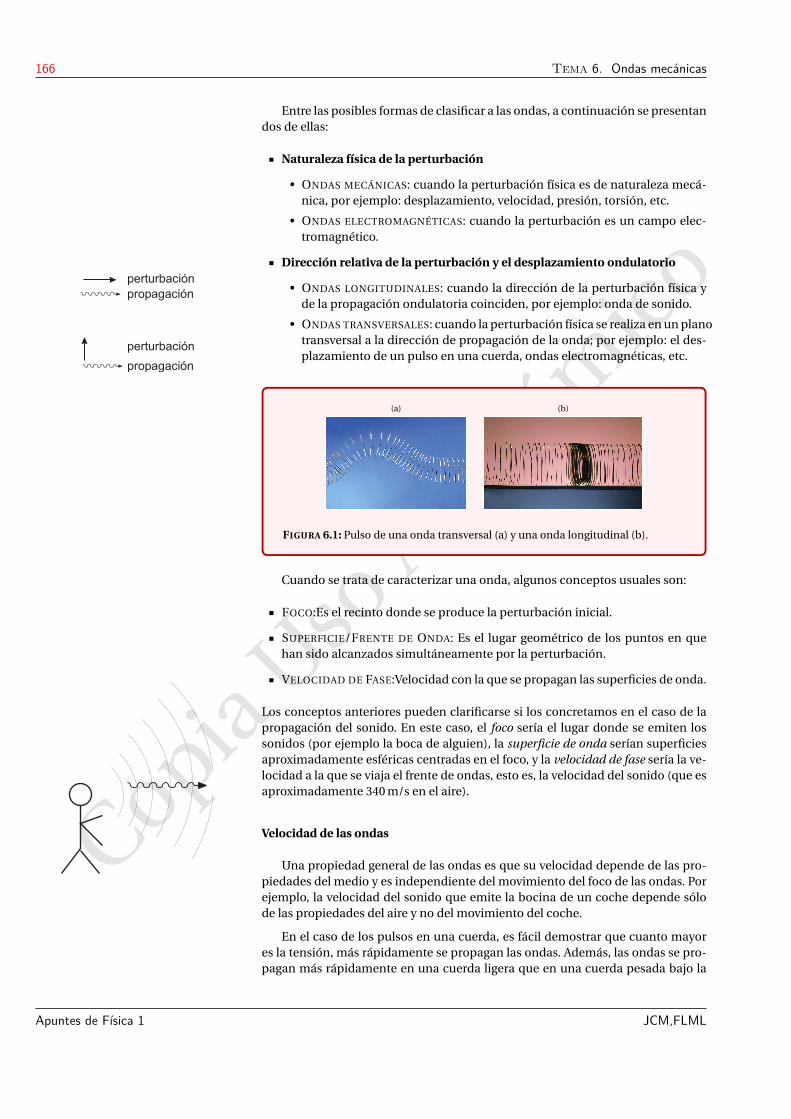
CopiaUso
Académico
166 Tema 6. Ondas mecánicas
Entre las posibles formas de clasificar a las ondas, a continuación se presentandos de ellas:
Naturaleza física de la perturbación
• ONDAS MECÁNICAS: cuando la perturbación física es de naturaleza mecá-nica, por ejemplo: desplazamiento, velocidad, presión, torsión, etc.
• ONDAS ELECTROMAGNÉTICAS: cuando la perturbación es un campo elec-tromagnético.
Dirección relativa de la perturbación y el desplazamiento ondulatorioperturbación
perturbación
propagación
propagación
• ONDAS LONGITUDINALES: cuando la dirección de la perturbación física yde la propagación ondulatoria coinciden, por ejemplo: onda de sonido.
• ONDAS TRANSVERSALES: cuando la perturbación física se realiza en un planotransversal a la dirección de propagación de la onda; por ejemplo: el des-plazamiento de un pulso en una cuerda, ondas electromagnéticas, etc.
(a) (b)
FIGURA 6.1: Pulso de una onda transversal (a) y una onda longitudinal (b).
Cuando se trata de caracterizar una onda, algunos conceptos usuales son:
FOCO:Es el recinto donde se produce la perturbación inicial.
SUPERFICIE/FRENTE DE ONDA: Es el lugar geométrico de los puntos en quehan sido alcanzados simultáneamente por la perturbación.
VELOCIDAD DE FASE:Velocidad con la que se propagan las superficies de onda.
Los conceptos anteriores pueden clarificarse si los concretamos en el caso de lapropagación del sonido. En este caso, el foco sería el lugar donde se emiten lossonidos (por ejemplo la boca de alguien), la superficie de onda serían superficiesaproximadamente esféricas centradas en el foco, y la velocidad de fase sería la ve-locidad a la que se viaja el frente de ondas, esto es, la velocidad del sonido (que esaproximadamente 340 m/s en el aire).
Velocidad de las ondas
Una propiedad general de las ondas es que su velocidad depende de las pro-piedades del medio y es independiente del movimiento del foco de las ondas. Porejemplo, la velocidad del sonido que emite la bocina de un coche depende sólode las propiedades del aire y no del movimiento del coche.
En el caso de los pulsos en una cuerda, es fácil demostrar que cuanto mayores la tensión, más rápidamente se propagan las ondas. Además, las ondas se pro-pagan más rápidamente en una cuerda ligera que en una cuerda pesada bajo la
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.2. Ecuación de ondas 167
misma tensión. Si T es la tensión y ρ la densidad lineal de masa, la velocidad dela onda es
v =√
T
ρ. (6.1)
Velocidad de las ondas en una cuerda
En el caso de las ondas sonoras en un gas, tal como el aire, la velocidad v vieneexpresada por
v =√γRT
M(6.2)
En esta ecuación T es la temperatura absoluta medida en grados Kelvin. La cons-
Velocidad del sonido en un gas
tante γ depende del tipo de gas (para el aire, γ = 1.4). R = 8.314J/(mol·K) es laconstante universal de los gases y M es la masa molar del gas, que para el aire esM = 29g/mol.
Finalmente, la velocidad de propagación de las ondas electromagnéticas en el va-cío es una constante universal de valor
Velocidad de las ondas electromagné-ticas en el vacío
c = 1pµ0ε0
= 2.99792×108 m/s . (6.3)
6.2. Ecuación de ondas
Cuando estudiamos la dinámica de una partícula en el Tema 3 vimos que exis-tía una ecuación diferencial general (segunda ley de Newton) que determina elmomento lineal, ~p, de una partícula en función de la fuerza externa, ~F :
~F = d~p
dt. (6.4)
Para el caso de movimiento monodimensional, esta ecuación se convierte en lasiguiente ecuación diferencial de segundo grado para la la función x(t ) que des-cribe la posición de la partícula:
d2x
dt 2 − F
m= 0 . (6.5)
Del mismo modo que existe esta ecuación diferencial que determina el movi-miento de la partícula existe también una ecuación diferencial general, deno-minada ecuación de ondas, que determina todos los fenómenos ondulatorios. Laecuación que describe el comportamiento ondulatorio de una perturbación físicadescrita matemáticamente como u(x, t ) que se propaga con velocidad constantev sin distorsión (onda no-dispersiva) a lo largo del eje x viene dada por
Ecuación de ondas no dispersiva mo-nodimensional∂2u
∂x2 − 1
v2
∂2u
∂t 2 = 0 . (6.6)
Para mostrar que la ecuación anterior describe matemáticamente el fenómenoondulatorio, analizaremos la propagación de un pulso en una cuerda (este ejem-plo ofrece una imagen visual muy oportuna). En este caso, la perturbación u(x, t )representa justamente el desplazamiento vertical de cada trocito de cuerda. Laforma del pulso para un instante arbitrario, que podemos tomar como t = 0, semuestra en la Figura 6.2(a); esto es, la forma matemática de la onda en ese instan-te de tiempo viene completamente descrita por la función u(x). Si tras un tiem-po t , el pulso viaja sin distorsión hacia la derecha una distancia a, el perfil de la
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
168 Tema 6. Ondas mecánicas
FIGURA 6.2: Evolución del pulso en una cuerda en dos instantes
cuerda será como el mostrado en la Figura 6.2(b), pudiéndose describir matemá-ticamente por la función u(x −a). Ahora bien, si el pulso viaja a una velocidad v ,la distancia a recorrida por el pulso será a = v t y, consecuentemente, la expresiónmatemática de la onda en el instante t puede escribirse como
u(x, t ) = f (x − v t ) . (6.7)
Ciertamente el pulso podría haber viajado igualmente hacia la izquierda, en cuyocaso, la expresión matemática de la onda viajera en la cuerda sería
u(x, t ) = f (x + v t ) , (6.8)
de modo que un movimiento ondulatorio general en la cuerda podría ser descritopor la función
u(x, t ) = f (χ) , χ= x ± v t (6.9)
que representaría una onda que puede viajar tanto hacia la izquierda como haciala derecha. Para encontrar la ecuación diferencial cuya solución general es unafunción del tipo (6.9), diferenciaremos la función u(x, t ) con respecto a x y a t ,esto es,
∂u
∂x= du
dχ
∂χ
∂x= u′(χ) (6.10)
∂u
∂t= du
dχ
∂χ
∂t=±vu′(χ) . (6.11)
Dado que las primeras derivadas no pueden relacionarse entre sí debido a la in-definición en el signo de (6.11), procedemos para obtener las derivadas segundas:
∂2u
∂x2 = ∂
∂x
[∂u
∂x
]= d
dχ
[u′(χ)
] ∂χ∂x
= u′′(χ) (6.12)
∂2u
∂t 2 = ∂
∂t
[∂u
∂t
]= d
dχ
[±vu′(χ)] ∂χ∂t
= v2u′′(χ) . (6.13)
Si observamos ahora la forma de los segundos miembros de (6.12) y (6.13), po-demos comprobar que al eliminar u′′(χ) obtendríamos precisamente la ecuación
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.3. Ondas armónicas 169
general de ondas mostrada en (6.6). En consecuencia, esta ecuación diferencialen derivadas parciales tiene por soluciones a funciones del tipo (6.7) y (6.8) con laúnica condición de que éstas sean diferenciables hasta el segundo orden (la for-ma concreta de estas funciones en cada caso particular vendrá determinada porlas condiciones iniciales del problema).
Una propiedad muy importante de la ecuación general de ondas (6.6) es queésta es lineal, lo que implica que si u1(x, t ) y u2(x, t ) son soluciones individualesde la ecuación de ondas, entonces una superposición lineal de ambas, u(x, t ) =α1u1(x, t )+α2u2(x, t ), también lo es. Esta propiedad de linealidad de la ecuaciónde ondas simplemente expresa en forma matemática el siguiente principio físicoconocido como principio de superposición de ondas:
Principio de superposiciónde ondas
Cuando dos o más perturbaciones ondulatorias coinciden en unpunto y en un instante de tiempo, la perturbación ondulatoriaresultante es igual a la suma de las perturbaciones coincidentes.
6.3. Ondas armónicas
Según se ha explicado en el apartado anterior, la expresión matemática gene-ral de una onda monodimensional no-dispersiva venía dada por (6.9). De entrelas posibles formas matemáticas que puede tener este tipo de ondas, hay una es-pecialmente interesante conocida como onda armónica. La forma de una ondaarmónica es una curva tipo sinusoidal, cuya instantánea en t = 0 puede venir da-da por la siguiente expresión matemática:
u(x,0) = A sen
(2π
λx
). (6.14)
La constante A es la amplitud de la onda y representa el valor máximo de la per-turbación, λ es la longitud de onda o periodo espacial, esto es, la distancia en laque se repite la perturbación (por ejemplo, la distancia entre dos mínimos suce-sivos). Si la onda se mueve hacia la derecha con cierta velocidad v , la función deonda en cualquier instante de tiempo t posterior vendrá dada por
t
vt
u(x, t ) = A sen
[2π
λ(x − v t )
]. (6.15)
El tiempo que tarda la onda en recorrer una longitud de onda se conoce comoperiodo T , por lo que
v = λ
To’ λ= v T . (6.16)
El periodo T corresponde igualmente al tiempo empleado por la perturbación enrealizar una oscilación completa en un punto fijo.
Usando la definición del periodo, (6.15) puede escribirse como
u(x, t ) = A sen
[2π
(x
λ− t
T
)]. (6.17)
La expresión anterior indica claramente que la onda armónica muestra una dobleperiodicidad, tanto en el espacio como en el tiempo:
u(x, t ) = u(x +nλ, t +mT ) . (6.18)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
170 Tema 6. Ondas mecánicas
Esta doble periodicidad es una consecuencia de la periodicidad temporal de laperturbación en el foco (x = 0), que se refleja en una periodicidad espacial.2
La función de onda armónica puede expresarse en una forma más convenien-te si se definen dos cantidades, k yω, que corresponden a la frecuencia espacial onúmero de ondas y a la frecuencia angular respectivamente, esto es,
k = 2π/λ (6.19)
ω= 2π/T . (6.20)
Combinando las expresiones (6.19) y (6.20) junto con (6.16), obtenemos la si-guiente relación para la frecuencia angular y el número de ondas de una ondaarmónica:
ω= vk . (6.21)
La frecuencia angularω suele expresarse comúnmente en términos de la frecuen-cia temporal, f (siendo ésta la inversa del periodo: f = 1/T ) mediante
ω= 2π f . (6.22)
La frecuencia temporal representa por tanto el número de oscilaciones realizadasUnidad de frecuencia: 1 hercio(Hz≡ s−1) por unidad de tiempo, siendo su unidad el hercio (Hz).
Teniendo en cuenta las definiciones dadas en (6.19) y (6.20), la función de on-da armónica que viaja en el sentido positivo de las x puede escribirse como
u(x, t ) = A sen(kx −ωt ) . (6.23)
La expresión anterior es un caso particular de la siguiente expresión genéricausando la función coseno:
Expresión matemática de la ondaarmónica viajando en el sentido
positivo de las x
u(x, t ) = A cos(ωt −kx −ϕ) , (6.24)
donde el argumento completo del coseno se conoce como fase de la onda y laconstante ϕ como fase inicial y se introduce para posibilitar que en t = 0 la per-turbación en el foco (x = 0) pueda tomar un valor arbitrario: u(0,0) = A cosϕ. Unaonda armónica viajando en el sentido negativo de las x tendrá la siguiente formageneral:
u(x, t ) = A cos(ωt +kx −ϕ) . (6.25)
Es interesante notar que el carácter viajero de la onda en sentido positivo/negati-vo del eje x lo determina la desigualdad/igualdad entre los signos que acompañana ωt y kx en la fase.
Para facilitar las operaciones con ondas armónicas, éstas suelen expresarse enforma de exponencial compleja, de manera que la onda armónica dada en (6.24)se escribirá usualmente como
u(x, t ) = Ae−j(kx+ϕ)ejωt (6.26)
(ver Apéndice 1.11 para un estudio de los fasores), aunque debe considerarse que
Expresión matemática compleja dela onda armónica
u(x, t ) tal como se ha expresado en (6.24) es solamente la parte real de (6.26):
u(x, t ) = A cos(ωt −kx −ϕ) = Re(
Ae−j(kx+ϕ)ejωt)
. (6.27)
2 De manera análoga a como un pastelero soltando pasteles cada tiempo T en un extremo de unacinta transportadora (periodicidad temporal en el foco) que se mueve con velocidad v da lugar auna periodicidad espacial en dicha cinta; esto es, los pasteles aparecen distanciados una longitudde onda.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.3. Ondas armónicas 171
No obstante, en lo que sigue del tema, cuando tratemos con ondas armónicasusaremos la notación compleja por simplicidad, debiéndose sobreentender quela onda verdadera es la parte real de la expresión compleja.
Es interesante observar que en cualquier punto fijo x = x0, la perturbaciónpuede escribirse como
s(t ) ≡ u(x0, t ) = A cos(ωt +φ) (6.28)
donde φ = −kx0 −ϕ. Si la perturbación física que se propaga en la onda fueseun desplazamiento respecto a cierta posición de equilibrio, tendríamos enton-ces que esta perturbación se corresponde con un moviento armónico simple(M.A.S.) [ver Apartado 3.5]. Es decir, los puntos del espacio afectados por dichaperturbación ondulatoria de tipo armónico oscilarían en la forma de un M.A.S.
EJEMPLO 6.1 Una onda armónica en una cuerda
La función de onda de una onda armónica que se mueve en una cuerda esy(x, t ) = 0.03sen(2.2x − 3.5t ), con y y x en metros y t en segundos. (a) ¿En qué sentidode propaga esta onda y cuál es su velocidad?. (b) Determinar la longitud de onda, la fre-cuencia y el periodo de esta onda. (c) ¿Cuál es el desplazamiento máximo de cualquiersegmento de cuerda? (d) ¿Cuál es la velocidad máxima de cualquier segmento de cuerda?
(a) Para determinar el sentido de la onda, expresamos y(x, t ) en función de (x ± v t ). Siel signo es positivo (negativo), la onda viaja en el sentido negativo (positivo) del eje x.Como y(x, t ) = A sen(kx−ωt ), podemos escribir y(x, t ) = A sen[k(x−v t )], donde hemosusado que ω= kv . Por tanto, la onda viaja en el sentido positivo del eje x.
Por otro lado, identificando términos, sabemos que A = 0.03 m, k = 2.2 m−1 y ω =3.5 rad/s. Así, mediante la relación de dispersión, ω = kv , se puede obtener el valorde v :
v = ω
k= 3.5
2.2m/s = 1.59m/s
(b) La longitud de onda λ está relacionada con el número de ondas k, y la frecuencia ν y elperiodo T , están relacionados con ω de la forma:
λ= 2π
k= 2.86m
T = 2π
ω= 1.80s
f ≡ ν= 1
T= 0.557Hz .
(c) El desplazamiento máximo del segmento de cuerda es la amplitud A.
A = 0.03m .
(d) La velocidad “vertical” de un punto de la cuerda, vy , vendrá dada por la derivada tem-poral del desplazamiento en dicha dirección, esto es
vy (x, t ) = ∂y(x, t )
∂t=−ωA cos(kx −ωt ) .
Por tanto, la velocidad máxima tiene lugar cuando cos(kx −ωt ) =−1, es decir,
vy,máx = Aω= 0.105m/s .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
172 Tema 6. Ondas mecánicas
FIGURA 6.3: (a) Desplazamiento respecto al equilibrio de las moléculas de aire enuna onda sonora armónica en función de la posición en un cierto instante. Lospuntos x1 y x3 son puntos de desplazamiento nulo. (b) Algunas moléculasrepresentativas igualmente espaciadas en sus posiciones de equilibrio 1/4 deciclo antes. Las flechas indican el sentido de sus velocidades en ese momento. (c)Moléculas próximas a los puntos x1, x2 y x3 después de la llegada de la onda.Justo a la izquierda de x1, el desplazamientos es negativo, indicando que lasmoléculas del gas se desplazan hacia la izquierda, alejándose del punto x1 en esemomento. Justo a la derecha de x1, el desplazamiento es positivo, indicando quelas moléculas se desplazan hacia la derecha, o sea, de nuevo alejándose del puntox1. Así, en el punto x1 la densidad es un mínimo, ya que las moléculas de gas enambos lados se desplazan alejándose de dicho punto. En el punto x3, la densidades un máximo porque las moléculas a ambos lados de este punto se desplazanhacia x3. En el punto x2 la densidad no se modifica, pues las moléculas a amboslados de este punto tienen desplazamientos iguales en la misma dirección. (d)Densidad del aire en ese momento. La densidad es máxima en x3 y mínima en x1,puntos ambos en los que el desplazamiento es nulo. Es cero en el punto x2, quees un máximo de desplazamiento. (e) Cambio de presión, que es proporcional alcambio de densidad, en función de la posición. Los cambios de presión ydesplazamiento (cambios de posición) están desfasados 90º
6.3.1. Ondas sonoras armónicas
Las ondas sonoras armónicas pueden generarse mediante un diapasón o unaltavoz que vibre con movimiento armónico simple. La fuente vibrante hace quelas moléculas de aire próximas oscilen con movimiento armónico simple alrede-dor de sus posiciones de equilibrio. Estas moléculas chocan con otras moléculaspróximas, haciéndolas oscilar, y, por lo tanto, propagan la onda sonora. Si expre-samos el desplazamiento de las moléculas respecto a su posición de equilibriocomo u(x, t ) ≡ s(x, t ), tendremos que dicho desplamiento (supuesta una fase ini-cial nula) puede escribirse como
s(x, t ) = s0 cos(ωt −kx) . (6.29)Función de una onda sonora
armónica
Estos desplazamientos se producen a lo largo de la dirección de propagaciónde la onda y dan lugar a variaciones de densidad y presión del aire. La figura 6.3muestra el desplazamiento de las moléculas de aire y los cambios de densidad ori-ginados por una onda sonora en un movimiento determinado. Como la presión
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.4. Energía e Intensidad de la onda 173
del gas es proporcional a su densidad, el cambio de presión es máximo cuandola variación de densidad es máxima. Los gráficos de la figura nos muestran quela onda de presión (o de densidad) está desfasada 90o respecto al desplazamientode la onda. Cuando el desplazamiento es nulo, los cambios de presión y densidadson máximos o mínimos. Cuando el desplamiento es máximo o mínimo, los cam-bios de presión y densidad son nulos. Una onda de desplazamiento dada por laecuación (6.29) implica una onda de presión dada por
p(x, t ) = p0 sen(kx −ωt ) (6.30)
donde p representa la variación de presión respecto a la presión de equilibrio (loque el Apartado 5.2.3 denominamos presión manométrica), y p0 es el valor máxi-mo de esta variación. Se puede demostrar que la máxima amplitud de esta varia-ción de presión p0 está relacionada con la máxima amplitud de desplazamientos0 mediante
Relación entre las amplitudes de pre-sión y desplazamiento
p0 = ρωv s0 (6.31)
donde v es la velocidad de propagación y ρ la densidad de equilibrio del gas. Así,cuando una onda sonora se propaga en el tiempo, el desplazamiento de las mo-léculas del aire, la presión y la densidad varían todas ellas de forma armónica conla frecuencia de la fuente vibrante.
6.4. Energía e Intensidad de la onda
La intensidad de una onda se define como
la energía que fluye por unidad de tiempo a través de una superficieunidad situada perpendicularmente a la dirección de propagación.
Si ρU es la densidad volumétrica de energía de la onda (esto es, la energía mediapor unidad de volumen contenida en el medio donde se propaga la onda) y v lavelocidad de propagación de la onda, la intensidad I de la onda es
Intensidad de la ondaI = ρU v , (6.32)
cuyas unidades son (Jm−3)(ms−1)=Js−1m−2=Wm−2; es decir, potencia por unidadde área.
Analicemos el caso particular en el que una perturbación ondulatoria no dis-persiva armónica (por ejemplo, una onda sonora) se propaga a lo largo de la di-rección x en un medio homogéneo, isótropo y no absorbente de densidad de ma-saρm . En este caso, el movimiento armónico de cada partícula (y también su ener-gía) es transmitida a las restantes partículas del medio que la rodea. La expresiónmatemática del desplazamiento de las partículas, tal como ya se definió en (6.29),puede expresarse como
u(x, t ) = A cos(ωt −kx) .
Las partículas de este medio adquieren, al paso de la onda, una cierta velocidad,u(x, t ), que viene dada por
u(x, t ) = ∂u(x, t )
∂t=−ωA sen(ωt −kx) (6.33)
y, por consiguiente, una energía mecánica debida al movimiento armónico querealizan. En este tipo de movimiento, la energía total de las partículas puede igua-larse a la energía cinética máxima que adquieren. Por tanto, la energía,∆U , de un
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
174 Tema 6. Ondas mecánicas
elemento de volumen, ∆V = Sv∆t (de sección transversal S y anchura ∆l = v∆t ,siendo v la velocidad de propagación de la perturbación ondulatoria) puede ex-presarse como
∆U = 1
2∆m u2
max =1
2ρmSv∆t u2
max . (6.34)
A partir de (6.33) obtenemos que la velocidad máxima de las partículas será umax =ωA, por lo que la energía puede escribirse como
∆U = 1
2ρmSv∆tω2 A2 (6.35)
y, finalmente, la densidad volumétrica de energía vendrá dada por
ρU = ∆U
∆V= 1
2ρmω
2 A2 . (6.36)
La potencia P , o energía transmitida al medio por unidad de tiempo, se obtiene apartir de
P = ∆U
∆t= 1
2ρmSvω2 A2 . (6.37)
Dado que la intensidad, I , de la onda viajera es potencia por unidad de área, setiene finalmente que
Intensidad de la onda armónicamecánica: I ∝ A2
I = Potencia
Área= 1
2ρmω
2 A2v . (6.38)
Para el caso particular que estamos analizando, teniendo en cuenta (6.36), obser-vamos que (6.38) puede también expresarse como I = ρU v , en concordancia conla expresión general (6.32). Es también interesante notar en (6.38) que la intensi-dad de la onda armónica mecánica es proporcional al cuadrado de la frecuenciay al cuadrado de la amplitud de la perturbación.
La intensidad de una onda sonora se obtiene sustituyendo en (6.31) para laamplitud A ≡ s0 = p0/(ρmωv), obteniéndose
I = 1
2
p20
ρm v. (6.39)
El oído humano puede acomodarse a un largo intervalo de intensidad de ondas
Intensidad de una ondasonora armónica
sonoras, desde 10−12 W/m2 aproximadamente (que normalmente se toma co-mo el umbral de audición) hasta 1 W/m2 aproximadamente (que produce unasensación dolorosa en la mayoría de las personas). Las variaciones de presiónque corresponden a estas intensidades extremas varía aproximadamente desde3×10−5 Pa para el umbral de audición hasta 30 Pa para el umbral del dolor. Estaspequeñas variaciones de presión se superponen (sumando o restando) a la pre-sión atmosférica normal cuyo valor es 1013 hPa.
EJEMPLO 6.2 Un altavoz
El diafragma (diámetro D = 30 cm) de un altavoz vibra con una frecuencia f = 1kHz yuna amplitud A = 0.020mm. Suponiendo que las moléculas de aire próximas al diafrag-ma tienen esta misma amplitud de vibración, determinar (a) la amplitud de la variaciónde presión y la intensidad sonora justo enfrente del diafragma; (b) la potencia acústicairradiada. Dato: La densidad del aire es ρ = 1.29 kg/m3.
(a) La amplitud de la variación de la presión se calcula directamente de (6.31):
p0 = ρωv A = 55.1Pa .
La intensidad se calcula usando (6.39):
I = 1
2ρ2 A2v = 3.46W/m2 .
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.4. Energía e Intensidad de la onda 175
(b) La potencia es el producto de la intensidad por el área del diafragma:
P = I S = 1
4πD2 = 0.245W .
Nivel de intensidad sonora
Nuestra percepción del sonido no está directamente relacionado con el valorespecífico de la intensidad sonora sino más bien con el logaritmo de dicho valor.Usamos por tanto una escala logarítmica para describir el nivel de intensidad deuna onda sonora, β, el cual se mide en decibelios (dB) y se define como
β(dB) = 10log10I
I0(6.40)
donde I es la intensidad física del sonido e I0 es un nivel de referencia, que toma-
Nivel de intensidad en dB
remos como umbral de audición:
I0 = 10−12 W/m2 .
En esta escala, el umbral de audición es β = 0dB y el umbral del dolor (I =1W/m2) esβ= 120 dB. El cuadro 6.1 relaciona los niveles de intensidad de algunossonidos comunes.
Fuente dB DescripciónRespiración normal 10 Escasamente audibleRumor de hojas 20Conversación en voz muy baja (a 5 metros) 30 Apenas ruidosoBiblioteca 40Cocina tranquila 50 Poco ruidosoConversación normal (a 1 metro) 60Tráfico denso 70Oficina ruidosa con máquinas; fábrica de tipo medio 80Camión pesado (a 15 metros); Cataratas del Niágara 90 La exposición constante daña al oídoTren de metro antiguo 100Ruido de construcción (a 3 metros) 110 Umbral de dolorConcierto de rock con amplificadores (a 2 metros) 120Ametralladora 130Despegue de un reactor (cercano) 150Motor de un cohete (cercano) 180
Cuadro 6.1: Intensidad física y nivel de intensidad sonora de algunos sonidos comunes(I0 = 10−12W/m2)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
176 Tema 6. Ondas mecánicas
EJEMPLO 6.3 Ladridos de perros
El ladrido de un perro supone alrededor de 1 mW de potencia. (a) Si esta potencia sedistribuye en todas direcciones, ¿cuál es el nivel de intensidad sonora a una distanciade 5 m? (b) ¿Cuál sería el nivel de intensidad de dos perros ladrando al mismo tiempo sicada uno de ellos desarrolla una potencia de 1 mW?
El nivel de intensidad sonora se deduce de la intensidad física y ésta de la expresiónI = P/(4πr 2). En nuestro caso, P = 1 mW y r = 5 m. Para dos perros, las intensidades físicasse suman.
(a) La intensidad producida por un perro a 5 m es
I1 = P
4πr 2= 3.18µW/m2 .
El nivel de intensidad sonora lo obtenemos de (6.40):
β1 = 10logI1
I0= 65.0dB .
(b) La intensidad de dos perros es I2 = 2I1. Por tanto, el nivel de intensidad para dos perrosserá
β2 = 10logI2
I0= 10log
2I1
I0= 10log2+β1
es decir,
β2 = 3.01+65.0 ≈ 68.0dB .
Vemos en este ejemplo que siempre que la intensidad física se duplica, la intensidadsonora se incrementa en 3 dB.
EJEMPLO 6.4 Sensibilidad del oido humano
A 1000 Hz, el umbral de audibilidad del oido humano corresponde a una intensidad de10−12 W/m2. ¿Cuál es el desplazamiento máximo de las moléculas de aire en este límite?.Datos: ρaire = 1.2 kg/m3, v = 340 m/s.
Dado que la intensidad de la onda sonora viene dada por
I = 1
2ρmω2 A2v ,
la amplitud, A, correspondiente al desplazamiento máximo de las moléculas del medioserá
A =√
2I
ρmω2v.
Al sustituir los datos del presente problema tendremos que
A =√
2 ·10−12
1.2 ·4π2 ×106 ·340≈ 1.1 ×10−11m .
Este desplazamiento es minúsculo, lo que demuestra la alta sensibilidad del oído hu-mano.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.5. Interferencia de Ondas 177
6.5. Interferencia de Ondas
Cuando dos o más ondas coinciden en el espacio en el mismo instante detiempo se produce un fenómeno que se conoce como interferencia. El princi-pio de superposición de ondas establece que cuando dos o más ondas coincidenen un punto y en un instante de tiempo, la perturbación resultante es la suma delas perturbaciones individuales (este principio ya fue relacionado en el Apartado6.2 con la linealidad de la ecuación de ondas). En consecuencia, la perturbaciónresultante en un punto P y en un instante de tiempo t , u(P, t ), debido a la coinci-dencia de N ondas ui (x, t ) se obtendrá mediante la siguiente expresión:
u(P, t ) =N∑
i=1ui (P, t ) . (6.41)
6.5.1. Superposición de dos ondas armónicas
Para estudiar los aspectos cuantitativos de la interferencia consideraremos lasuperposición de dos ondas armónicas monodimensionales de la misma frecuen-cia pero distinta amplitud y fase inicial,
PF
1
F2
r1
r2
u1(r, t ) = A1 cos(ωt −kr −ϕ1)
yu2(r, t ) = A2 cos(ωt −kr −ϕ2) ,
en cierto punto P . Si r1 y r2 son las distancias desde los focos respectivos al pun-to P , la perturbación resultante vendrá dada por
u(P, t ) = u1(r1, t )+u2(r2, t ) . (6.42)
Si usamos la notación compleja, la perturbación suma puede obtenerse a partirde
u(P, t ) = A1e−j(kr1−ωt+ϕ1) + A2e−j(kr2−ωt+ϕ2)
= [A1e−jε1 + A2e−jε2
]ejωt
= A(P )e−jε(P )ejωt (6.43)
dondeεi = kri +ϕi (6.44)
y A(P ) y ε(P ) son respectivamente la amplitud y la fase de la perturbación resul-tante en el punto P . Operando en (6.43) encontramos que
A(P )e−jε(P ) =A1e−jε1 + A2e−jε2
=(A1 cosε1 − jA1 senε1
)+ (A2 cosε2 − jA2 senε2
)= (A1 cosε1 + A2 cosε2)− j (A1 senε1 + A2 senε2) , (6.45)
de donde obtenemos que la amplitud puede ser calculada como sigue:
A2(P ) = A21 cos2 ε1 + A2
2 cos2 ε2 +2A1 A2 cosε1 cosε2+A2
1 sen2 ε1 + A22 sen2 ε2 +2A1 A2 senε1 senε2
= A21 + A2
2 +2A1 A2 cos(ε1 −ε2) ,
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
178 Tema 6. Ondas mecánicas
esto es,
A(P ) =√
A21 + A2
2 +2A1 A2 cosδ(P ) (6.46)
siendo
Amplitud de la interferencia de2 ondas armónicas de igual
frecuencia
δ(P ) = kr1 −kr2 +ϕ1 −ϕ2
= k∆r +∆ϕ . (6.47)
En la expresión anterior, δ(P ) se denomina diferencia de fase, ∆r = r1 − r2 se co-noce como diferencia de camino entre el recorrido de las dos ondas al propagarsedesde los focos respectivos hasta el punto P y∆ϕ=ϕ1−ϕ2 es la diferencia de faseinicial entre las dos ondas. El último término de la expresión anterior,
2A1 A2 cosδ(P ) ,
se denomina usualmente término de interferencia puesto que es el responsablede que la amplitud de la interferencia varíe al variar la diferencia de camino hastael punto P . En concreto, si notamos que −1 ≤ cosδ(P ) ≤ 1 encontraremos que laamplitud en un punto podrá tomar en general valores comprendidos entre
(A1 − A2) ≤ A ≤ (A1 + A2) . (6.48)
Para obtener la intensidad resultante de la superposición de las dos ondas ar-mónicas de igual frecuencia en el punto P debemos tener en cuenta que, según(6.38), la intensidad de las ondas armónicas depende del cuadrado de la amplitud(I ∝ A2). En consecuencia, a partir de (6.46), podemos deducir que la intensidadresultante será
I (P ) = I1 + I2 +2√
I1I2 cosδ(P ) . (6.49)
6.5.2. Focos incoherentes
En el apartado anterior observamos que la amplitud resultante en el punto Poscilaba entre dos valores dependiendo del valor concreto de δ en dicho punto.No obstante, en la práctica ocurre frecuentemente que la diferencia de fase no esconstante en el tiempo sino que δ = δ(t ). Esto puede ser debido a una posiblevariación temporal de las condiciones de emisión de los focos (usualmente en untiempo del orden de 10−10 s); por ejemplo:
1. La frecuencia de los focos no es estrictamente constante sino que presentapequeñas fluctuaciones arbitrarias que provocan que el número de ondas (yequivalentemente la longitud de onda) oscile ligeramente en torno a ciertovalor promedio, ⟨k⟩
k(t ) = ⟨k⟩+∆k(t ) .
2. Las fases iniciales de los dos focos presentan fluctuaciones al azar de modoque las funciones ϕ1(t ) y ϕ2(t ) no están correlacionadas de ninguna maneradando lugar a que la diferencia de fase inicial sea una función del tiempo,
∆ϕ=ϕ1(t )−ϕ2(t ) = f (t ) ,
que varía igualmente al azar.
Cuando nos encontramos con alguna de las condiciones anteriores decimos quelos focos son incoherentes. Debido a esta rápida variación arbitraria en el tiempo
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.5. Interferencia de Ondas 179
de la diferencia de fase, el término de interferencia se anula en promedio duranteel intervalo de observación debido a que el valor medio del coseno de un argu-mento que varia al azar es cero:
⟨cosδ(t )⟩ = 1
T
∫ T
0cosδ(t )dt = 0 .
Esto hecho implica que la intensidad promedio en el punto P , ⟨I (P )⟩, venga dadapor
⟨I (P )⟩ = I1 + I2 focos incoherentes. (6.50)
Notemos que en el presente caso de focos incoherentes, la anulación en prome-dio del término de interferencia hace que la intensidad de la perturbación NO de-penda de la posición del punto de observación. Este hecho provoca que aunquepodamos, en un sentido estricto, hablar de interferencia, ésta no será observable yusualmente diremos que “no existe interferencia.”
A menudo cuando se habla de un único foco también podemos decir que es-te foco es “incoherente”. En este caso, en realidad estamos queriendo decir queeste único foco tiene cierta extensión espacial, y que las distintas partes del foco(asimilables a diversos focos puntuales) no son coherentes entre sí.
6.5.3. Focos coherentes
Cuando la fase inicial de los dos focos está completamente correlacionada, demodo que
ϕ1(t )−ϕ2(t ) 6= f (t ) ,
manteniendo una diferencia de fase inicial constante, se dice que los dos focosson coherentes. En el caso de que ∆ϕ = 0, δ sólo dependerá de la diferencia decamino (en general ∆r ):
δ= k∆r = 2π∆r /λ (6.51)
dando lugar así a una interferencia que SÍ podría ser observable.
En las circunstancias anteriores, podemos distinguir dos casos de interés, de-pendiendo de si el valor de cosδ es 1 o’ -1; esto es, si A(P ) adquiere su valor máxi-mo (interferencia constructiva) o bien su valor mínimo (interferencia destructi-va). Por tanto, si
δ={
2nπ ⇒ A(P ) = A1 + A2 Interferencia Constructiva(2n +1)π ⇒ A(P ) = A1 − A2 Interferencia Destructiva.
(6.52)
Teniendo en cuenta (6.51), la condición de interferencia constructiva o destructi-va para ∆r en P vendrá dada por
∆r =nλ Interferencia Constructiva
(2n +1)λ
2Interferencia Destructiva ;
(6.53)
es decir, si la diferencia de camino es un múltiplo entero/semientero de la longitudde onda, entonces tendremos interferencia constructiva/destructiva.
Desde un punto de vista práctico, una forma usual de producir focos coheren-tes es generar dos focos secundarios a partir de la misma fuente primaria, ase-gurando así que la diferencia de fase inicial en los dos focos secundarios es unaconstante. Uno de los primeros experimentos que mostró el fenómeno de inter-ferencia con luz es el experimento de la doble rendija de Young mostrado en la
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
180 Tema 6. Ondas mecánicas
FIGURA 6.4: Experimento de la doble rendija de Young
FIGURA 6.5: Patrón de interferencia resultante en el experimento de la doblerendija de Young
Figura 6.4(a), constatando así convincentemente la naturaleza ondulatoria de laluz. En este experimento, la luz (u otra perturbación ondulatoria) proveniente deun foco primario S se hace pasar por una pantalla en la que se han realizado dosranuras S1 y S2 separadas una distancia d . Las rendijas se comportan como dosfocos coherentes de luz cuyas ondas interfieren en el semiespacio derecho. Estefenómeno provoca un patrón de interferencias en la pantalla SD donde aparecenregiones sombreadas (dibujadas en negro) junto a regiones más iluminadas tal ycomo se muestra en la Figura 6.5. En este experimento tenemos que la amplitudde las ondas que interfieren es idéntica, esto es,
A1 = A2 .
Si además consideramos que la pantalla SD se coloca a una distancia tal que D À dde las rendijas y admitimos que θ es muy pequeño, entonces, según muestra laFigura 6.4(b), encontramos que la diferencia de camino en la coordenada y de lapantalla viene dada por
∆r = d senθ ≈ d tanθ ≈ dy
D. (6.54)
En consecuencia, el patrón de interferencia obtenido en la pantalla SD mostra-rá franjas de interferencia constructiva o bien destructiva según se cumplan las
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.5. Interferencia de Ondas 181
siguientes condiciones:
Interferencia constructiva, y = yM:
k∆r = 2nπ ⇒ 2π
λd
yM
D= 2nπ , (6.55)
de donde se deduce que las franjas y = yM de interferencia constructiva veri-fican
yM = nD
dλ , (6.56)
siendo la intensidad de la onda en estas franjas: I = 4I1.
Interferencia destructiva, y = ym:
k∆r = (2n +1)π ⇒ 2π
λd
ym
D= (2n +1)π , (6.57)
de donde se deduce que las franjas y = ym de interferencia destructiva verifi-can
ym = 2n +1
2
D
dλ , (6.58)
siendo la intensidad de la onda en estas franjas I = 0.
Nótese que la diferencia ∆y entre un máximo y un mínimo consecutivo es
∆y = D
d
λ
2. (6.59)
Esta expresión nos proporciona adicionalmente un procedimiento muy sencillopara determinar el valor de la longitud de onda a partir de la medida de la distan-cia entre franjas de interferencia constructiva y destructiva.
Es interesante notar que en las franjas de interferencia constructiva se ha obte-nido que la intensidad es cuatro veces (y no dos) el valor de la intensidad propor-cionada por cada uno de los focos. Esto parece violar el principio de conservaciónde la energía, aunque tal hecho no se produce puesto que la energía de la ondano se distribuye homogéneamente en la pantalla SD sino que, debido a la inter-ferencia, existen puntos donde la energía es mayor que la suma de las energíasprovenientes de los focos pero también existen otros puntos donde la energía esmenor (incluso cero) que la proveniente de los focos.
EJEMPLO 6.5 Un foco de luz amarilla (λ = 600nm) incide sobre dos rendijas separadasuna distancia d , observándose la interferencia de la luz proveniente de estas rendijas enuna pantalla situada a una distancia de 3 m. Obtener la separación d entre las rendijaspara que la distancia entre máximos y mínimos consecutivos del patrón de interferencialuminoso sea mayor que 5 mm.
Según la teoría expuesta anteriormente, la distancia entre máximos y mínimos conse-cutivos en el experimento de la doble rendija de Young viene dado por
∆y > D
d
λ
2.
Al despejar en la expresión anterior d encontramos que
d < Dλ
2∆y= 3 ·6 ×10−7
2 ·5 ×10−3= 1.8 ×10−4m = 180µm .
El resultado anterior nos muestra que la separación entre rendijas debe ser muy pe-queña (y aún menor si ∆y se quiere mayor) por lo que en la práctica no es fácil llevar acabo este experimento.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
182 Tema 6. Ondas mecánicas
6.6. Ondas estacionarias
Observemos que cuando una perturbación viaja hacia la izquierda por unacuerda, al llegar al extremo, ésta se refleja de la forma mostrada en la figura ad-junta.
u x,t1( )
onda incidente
x= 0
u x,t2( )
onda reflejada
Si la situación anterior ocurre para una perturbación armónica que viaja haciala izquierda por una cuerda con uno de sus extremos fijos:
u1(x, t ) = A1 cos(ωt +kx) ,
al llegar al extremo de la cuerda, x = 0, la onda se refleja dando lugar a una ondaarmónica viajando hacia la derecha:
u2(x, t ) = A2 cos(ωt −kx) .
Dado que las dos ondas viajeras anteriores se encuentran en una misma región delespacio darán lugar a un fenómeno típico de superposición o interferencia. Pues-to que en el punto x = 0, la perturbación de la cuerda debe ser nula (puesto que,por hipótesis, es un extremo fijo) para cualquier instante de tiempo, tendremosque
u(0, t ) = A1 cos(ωt )+ A2 cos(ωt )
= (A1 + A2)cosωt = 0 , (6.60)
de donde se deduce que A1 =−A2.
Como las dos perturbaciones ondulatorias anteriores coinciden simultánea-mente en la misma región, la superposición de ambas (usando notación comple-ja) dará lugar a la siguiente onda:
u(x, t ) =−A2ej(ωt+kx) + A2ej(ωt−kx) = A2(−ejkx +e−jkx )ejωt
= A sen(kx)ej(ωt−π/2) (6.61)
(donde A = 2A2 y −j se ha escrito como e−jπ/2), cuya parte real puede finalmenteescribirse como
u(x, t ) = A sen(kx)sen(ωt ) . (6.62)
Nótese que en la expresión (6.62) no aparecen explícitamente expresiones del tipof (ωt ±kx), lo que indica que esta perturbación no puede identificarse ya simple-mente con una onda viajera, sino que constituye un nuevo tipo de onda conocidocomo onda estacionaria. En este tipo de perturbación ya no podemos decir quela energía viaja de un punto a otro sino que, como muestra la figura 6.6, esta ondaestacionaria corresponde a una situación en la que cada elemento individual dela cuerda realiza un movimiento armónico simple cuya amplitud es una funciónde x, A(x), pudiéndose escribir entonces que
u(x, t ) = A(x)sen(ωt ) , (6.63)
siendoA(x) = A sen(kx) . (6.64)
Observemos que en la situación anterior cada elemento de la cuerda es como siactuase de forma independiente, sin “transmitir su movimiento al siguiente”. Dehecho podemos incluso encontrar puntos denominados nodos donde la pertur-bación es nula para todo instante de tiempo. Estos puntos son aquellos que veri-fican que la amplitud es nula, es decir, aquellos que satisfacen la siguiente condi-ción:
kx = nπ ⇒ xnodo = nλ
2, (6.65)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.6. Ondas estacionarias 183
u x,t( )0
A
-A l/2 l 3l/2
x
FIGURA 6.6: Instantánea de la onda estacionaria en t = t0. Los nodos estánseparados una distancia λ/2.
siendo la distancia, ∆, entre dos nodos sucesivos una semilongitud de onda (∆=λ/2; recuérdese que la longitud de onda está determinada por la frecuencia y lavelocidad de propagación de la onda: λ= v/ f ).
Si ahora imponemos al problema anterior una segunda condición consistenteen que el otro extremo de la cuerda (el punto x = L) también esté fijo, entonces hade verificarse igualmente que
u(L, t ) = 0 ,
lo cual requiere que
senkL = 0 ⇒ kL = nπ . (6.66)
La condición anterior implica que tanto el número de ondas como la longitud deonda de la onda estacionaria sólo pueden tomar ciertos valores discretos (fenó-meno conocido como cuantización) dados por
kn = nπ
L= π
L,
2π
L,
3π
L, . . . (6.67)
λn = 2L
n= 2L,
2L
2,
2L
3, . . . (6.68)
Vemos entonces que la imposición de (6.66) ha limitado los valores de las longi-tudes de onda permitidas en la cuerda fija por sus dos extremos a aquéllos quecumplan la condición (6.68). De forma análoga, las frecuencias permitidas en lacuerda serán aquéllas que cumplan
ωn = vkn = vnπ
L. (6.69)
En consecuencia podemos concluir que tanto las longitudes de onda como lasfrecuencias permitidas en la cuerda están cuantizadas y que esta cuantizaciónes fruto de la imposición de condiciones de contorno en ambos extremos de lacuerda.
EJEMPLO 6.6 Una cuerda tensa de L = 60cm de longitud y que tiene una masa por uni-dad de longitud µ = 60g/m es sometida a una tensión T = 900N. Suponiendo que lacuerda se hace vibrar en su segundo armónico, ¿cuál será la frecuencia del sonido quegenerará?
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
184 Tema 6. Ondas mecánicas
Teniendo en cuenta que la velocidad de propagación de la onda en la cuerda vienedada por
v =√
T
µ,
en el presente caso, esto implica que la velocidad será
v =√
900
6 ×10−2≈ 122.47m/s .
Dado que la cuerda vibra en su segundo armónico (n = 2), entonces la longitud de ondaen este armónico será
λ2 = 2L/2 = 0.6m ,
por lo que la frecuencia, f , de la perturbación será
f = v
λ= 122.47
0.6≈ 204.12Hz .
Dado que la cuerda vibrante es el foco sonoro, la frecuencia del sonido que escucha-ríamos será la misma que la de vibración de la cuerda.
Finalmente observemos que en la cuerda con extremos fijos cada una de lasondas estacionarias permitidas responden a la siguiente expresión:
un(x, t ) = An sen(kn x)sen(ωn t +ϕn) ,
denominándose genéricamente como armónicos. Estos armónicos presentan laimportante propiedad de que cualquier perturbación en la cuerda puede expre-sarse como una superposición de ellos, esto es,
u(x, t ) =∞∑
n=1An sen(kn x)sen(ωn t +ϕn)
=∞∑
n=1An sen(nk1x)sen(nω1t +ϕn) , (6.70)
siendok1 = π
L, ω1 = v
π
L
y An la amplitud del n-ésimo armónico (esta amplitud será distinta en cada casoparticular). El resultado anterior puede considerarse como una conclusión parti-cular de un teorema más general, llamado teorema de Fourier, que básicamentedice que una función periódica puede expresarse como la suma de senos/cosenoscuyas frecuencias son un número entero de veces la frecuencia original del pro-blema (un tratamiento detallado de este teorema puede encontrarse en cualquierlibro de Cálculo).
6.7. Difracción (*)
Uno de los fenómenos ondulatorios más característicos es el conocido comodifracción. Este fenómeno se produce cuando una onda es distorsionada en supropagación por un obstáculo, aunque también se llama difracción a la interfe-rencia producida por muchos focos coherentes elementales. Desde un punto devista físico, la difracción no se diferencia básicamente de la interferencia puestoque ambos fenómenos son fruto de la superposición de ondas. La difracción pue-de ser, por ejemplo, la causa de la desviación de la luz de una trayectoria recta,
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.7. Difracción (*) 185
explicando así por qué la luz llega a puntos que, en principio, no debería alcanzarsi su propagación fuese estrictamente rectilínea. Un ejemplo de difracción puedeverse en la Figura 6.7(b) que muestra el patrón de sombras cuando una fuente deluz coherente ilumina una esquina recta. En la Fig. 6.7(a) se muestra esta mismasombra cuando no se produce difracción (por ejemplo, cuando la fuente de luz esincoherente).
IntensidadIntensidad
DistanciaDistancia
Sombrageométrica
BordeBorde
a) b)
FIGURA 6.7: Sombra producida por una esquina recta iluminada por una fuentede luz cuando: (a) NO se produce difracción, (b) SÍ se produce difracción
En el presente estudio de la difracción, consideraremos únicamente la deno-minada difracción de Fraunhofer, que se presenta cuando las ondas incidentespueden considerarse planas (esto es, su frente de onda es un plano) y el patrón dedifracción es observado a una distancia lo suficientemente lejana como para quesolo se reciban los rayos difractados paralelamente. Este estudio lo basaremos enel principio de Huygens, que explica la propagación ondulatoria suponiendo que
cada punto de un frente de ondas primario se comporta co-mo un foco de ondas esféricas elementales secundarias queavanzan con una velocidad y frecuencia igual a la onda pri-maria. La posición del frente de ondas primario al cabo de uncierto tiempo es la envolvente de dichas ondas elementales.
Siguiendo este principio, cuando un frente de onda alcanza una pantalla en laque existe una rendija de anchura b, tal y como se muestra en la Figura 6.8, sóloaquellos puntos del frente de ondas coincidentes con la rendija se convierten enfocos emisores secundarios, de modo que la perturbación ondulatoria en cual-quier punto a la derecha de la rendija puede calcularse como la superposición delas ondas originadas en cada uno de estos focos secundarios (ver Figura 6.8b).
En este sentido, y a efectos de cálculo, supondremos que existen N focos pun-tuales equiespaciados en la rendija. La perturbación ondulatoria, u(x, t ), en ciertopunto P de una pantalla SD (situada a una distancia D À d) será fruto de la in-terferencia de un gran número de fuentes equiespaciadas de igual amplitud y faseinicial, esto es,
u(P, t ) =N∑
n=1A0e−j(krn−ωt ) , (6.71)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
186 Tema 6. Ondas mecánicas
(a) (b)
S1
SD
P
b
S2
SN
r R
q
( )
N-1rD
Inte
nsid
ad
x
FIGURA 6.8: (a) Difracción de Fraunhofer de una rendija rectangular; (b) Cadapunto de la rendija se comporta como un foco puntual emisor de ondassecundarias.
donde rn es la distancia desde el foco secundario n-ésimo hasta el punto P y A0
la amplitud constante de cada onda elemental. Notemos que, bajo la presenteaproximación, todos los rayos que llegan a P se consideran paralelos. Si llamamosr a la distancia desde el foco 1 hasta P y ∆r a la diferencia de camino entre laperturbación que llega a P desde un foco y el siguiente, rn puede escribirse como
rn = r + (n −1)∆r .
La perturbación en P según (6.71) puede entonces expresarse como
u(P, t ) = A0
[e−jkr +e−jk(r+∆r ) +e−jk(r+2∆r ) + . . .
]ejωt
= A0
[1+e−jφ+e−2 jφ+ . . .+e−(N−1) jφ
]e−j(kr−ωt ) , (6.72)
donde φ = k∆r y pudiéndose identificar la suma entre corchetes como una seriegeométrica, Sg , de razón q = e−jφ. Dado que la suma de la siguiente serie geomé-trica viene dada por
1+q +q2 + . . .+q N−1 = 1−q N
1−q,
el resultado de la serie geométrica en (6.72) puede expresarse como
Sg = 1−ejNφ
1−ejφ= ejNφ/2
ejφ/2
e−jNφ/2 −ejNφ/2
e−jφ/2 −ejφ/2
= sen(Nφ/2)
sen(φ/2)ej(N−1)φ/2 ,
por lo que
u(P, t ) = A0sen(kN∆r /2)
sen(k∆r /2)e−j[k(r+ N−1
2 ∆r )−ωt ] . (6.73)
La expresión anterior puede reescribirse como
u(P, t ) = AP e−j(kR−ωt ) , (6.74)
donde
R = r + N −1
2∆r
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.7. Difracción (*) 187
es la distancia desde el centro de la rendija al punto P y
AP = A0sen(kN∆r /2)
sen(k∆r /2). (6.75)
es la amplitud resultante en P . Dado que la amplitud de la onda en la pantallavaría punto a punto, también variará la intensidad, formando lo que se conocecomo un patrón de difracción:
I (θ)
Imax= sen2(N k∆r /2)
sen2(k∆r /2). (6.76)
Claramente existe un mínimo en la intensidad de la perturbación cuando AP →0, esto es, cuando el numerador de (6.75) sea cero,
sen(kN∆r /2) = 0 ,
es decir, cuando el argumento verifica que
kN∆r /2 = mπ . (6.77)
Según se puede deducir de la Figura 6.8(b) (si N À):
N∆r ≈ (N −1)∆r = b senθ ,
por lo que la condición de mínimo (6.77) para AP puede reescribirse como
2π
λ
b senθ
2= mπ , (6.78)
o equivalentementeb senθm = mλ m = 1,2, . . . (6.79)
El primer mínimo (o mínimo de primer orden) ocurre para m = 1, verificán-dose entonces que
Condición de intensidad nula en la di-fracción por una rendija
senθ1 = λ
b. (6.80)
Puede observarse que si λ¿ b, θ1 ≈ 0, por lo que apenas se observará patrón dedifracción, es decir, la zona de sombra aparece bien definida tal como ocurriría sila onda se propagase en línea recta. A medida que el cociente λ/b crece, el ánguloθ1 aumenta, haciéndose, por tanto, más evidente el fenómeno de difracción. Engeneral, los fenómenos de difracción son más apreciables cuando las dimensio-nes de la rendija son del orden de la longitud de onda de la perturbación ondula-toria (no obstante, debe tenerse en cuenta que el análisis efectuado para obtenerla expresión (6.79) es sólo válido si λ < b, puesto que de otro modo el seno seríamayor que uno para todo valor de m).
EJEMPLO 6.7 Hallar la anchura de la franja central del patrón de difracción producidoen una pantalla situada a una distancia de 5 m de una rendija de anchura 0.3 mm porla que se ha hecho pasar una luz laser de 600 nm.
La anchura de la franja central puede obtenerse a partir del ángulo θ1 que nos da elprimer mínimo en el patrón de difracción. Según la expresión (6.80), este ángulo vienedado por
senθ1 = λ
b= 6 ×10−7m
3 ×10−4m= 2 ×10−3 .
Dado que senθ1 ¿, tenemos quesenθ1 ≈ tanθ1
y, por tanto, la anchura de la franja central será
2a = 2D tanθ1 ≈ 2 ·5 ·2 ×10−3 = 20mm .
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
188 Tema 6. Ondas mecánicas
6.8. Grupo de Ondas
Aunque hasta ahora hemos estado tratando con ondas armónicas, debe te-nerse en cuenta que una onda armónica es una idealización que no puede repre-sentar, en sentido estricto, a una perturbación real. Claramente, cualquier pertur-bación o señal real debe empezar y acabar en determinados instantes de tiempo.La onda armónica representaría una señal que no empieza ni acaba nunca y queademás tiene siempre la misma amplitud, fase y frecuencia. Una señal de estetipo, además de irreal, no transmitiría información alguna puesto que la informa-ción está necesariamente asociada a los cambios de alguna magnitud detectable(una conversación puede tener lugar porque se perciben cambios incesantes enla frecuencia y amplitud de la onda sonora).
Una onda que empieza en cierto instante de tiempo y que acaba un ciertotiempo después recibe el nombre de pulso. Ahora bien, este pulso no puede es-tar formado por la superposición de ondas armónicas de igual frecuencia y dis-tinta amplitud, puesto que, como se señaló en el Apartado 6.3, la superposiciónde ondas armónicas de la misma frecuencia es simplemente otra onda armónicade la misma frecuencia. El pulso puede, sin embargo, construirse sumando on-das armónicas de distinta frecuencia y, consecuentemente, de distinto númerode ondas. En este sentido denominaremos grupo de ondas a un conjunto de on-das armónicas de distinta frecuencia que se propagan superpuestas en la mismadirección. Entre los distintos grupos de ondas existe uno de mucho interés prác-tico que se conoce como paquete de ondas. Un paquete de ondas está formadopor la superposición de un conjunto infinito de ondas armónicas de amplitud yfrecuencia variables con respecto al número de ondas, k, que se propagan super-poniéndose a lo largo del eje x. Una de las componentes infinitesimales de estegrupo de ondas puede representarse por
uk (x, t ) = Ak e−j[kx−ω(k)t ] . (6.81)
Si conocemos cómo varía tanto la amplitud como la frecuencia con respecto alnúmero de ondas, podríamos formar el paquete de ondas superponiendo de for-ma continua ondas del tipo (6.81), es decir,
u(x, t ) =∫ ∞
−∞uk (x, t )dk =
∫ ∞
−∞A(k)e−j[kx−ω(k)t ]dk . (6.82)
A continuación analizaremos la forma del paquete de ondas en función de lanaturaleza dispersiva o no dispersiva del medio en el que se propaga la onda. Engeneral diremos que un medio no dispersivo es aquel para el que se cumple quela función ω(k) es una función lineal del número de ondas:
Medio NO dispersivo: ω= vkω= vk , (6.83)
tal como se dedujo en (6.21) a partir de la ecuación de ondas no dispersiva. Parael medio no dispersivo, al introducir (6.83) en (6.82) encontramos que
u(x, t ) =∫ ∞
−∞A(k)e−jk(x−v t )dk , (6.84)
esto es, la integral es una función exclusivamente de x − v t . En consecuencia po-demos escribir que
u(x, t ) = f (x − v t ) , (6.85)
representando así a una perturbación que se propaga sin distorsión. Concluimosentonces que en los medios no dispersivos el paquete de ondas se propaga sin
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.8. Grupo de Ondas 189
distorsión, lo cual es imprescindible en la proceso de transmisión de informaciónpara recibir la misma “información” que se envió.
Desafortunadamente, la mayoría de los medios son medios dispersivos don-de se observa que
Ondas armónicas de diferente longitud de onda se propagan con diferente ve-locidad, esto es, v = v(k).
La forma de la onda se distorsiona cuando se propaga.
Para medios dispersivos, la ecuación de ondas no viene dada por (6.6) sino queen general aparecerán también derivadas de otros órdenes con respecto a x y t .Dado que en estos medios, la velocidad con que se propagan las ondas armónicasdepende de la longitud de onda, encontramos que la frecuencia y el número deondas no estarán relacionados linealmente, sino que
ω(k) = v(k)k . (6.86)Medio dispersivo: ω= v(k)k
Una manera muy usual de reducir al máximo el inconveniente práctico de ladeformación de la señal al transmitirse por un medio dispersivo consiste en laconstrucción de un tipo de paquete de ondas en el que la amplitud de las compo-nentes armónicas de la onda muestre un máximo muy acusado en torno a ciertovalor central k0 y decaiga rápidamente en un entorno ±∆k respecto a k0, siendo
∆k ¿ k0 . (6.87)
Así, si sumamos de forma continua ondas armónicas con un número de ondas kcomprendido entre k0 −∆k ≤ k ≤ k0 +∆k, el paquete de ondas resultante puedeexpresarse como la siguiente integral:
u(x, t ) =∫ k0+∆k
k0−∆kA(k)e−j[kx−ω(k)t ]dk , (6.88)
Si, por ejemplo, suponemos que la dependencia de la amplitud con respecto alnúmero de ondas viene dada por
A(k) ={
B si k0 −∆k ≤ k ≤ k0 +∆k
0 en otro caso ,
entonces el paquete de ondas puede obtenerse integrando la siguiente expresión:
u(x, t ) = B∫ k0+∆k
k0−∆ke−j[kx−ω(k)t ]dk . (6.89)
Debido a que ∆k ¿ k0,ω(k) puede desarrollarse en serie de Taylor en torno a k0 yquedarnos con el primer término:
ω(k) ≈ω(k0)+ dω
dk
∣∣∣∣k=k0
(k −k0) . (6.90)
La validez de la aproximación anterior se deteriora si el medio es muy dispersivoo si aumentamos ∆k. Definiendo en (6.90)
ω0 =ω(k0) y vg = dω
dk
∣∣∣∣k=k0
, (6.91)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
190 Tema 6. Ondas mecánicas
FIGURA 6.9: Paquete de ondas puede verse como una señal portadora cuyaamplitud está modulada.
ω(k) puede reescribirse como
ω(k) ≈ω0 + (k −k0)vg , (6.92)
lo que permite expresar
kx −ω(k)t = kx −ω0t − (k −k0)vg t
= (k0x −ω0t )+ (k −k0)(x − vg t ) . (6.93)
Introduciendo (6.93) en (6.89) y realizando el cambio de variableα= k−k0, u(x, t )puede expresarse como
u(x, t ) = Be−j(k0x−ω0t )∫ ∆k
−∆ke−j(x−vg t )αdα . (6.94)
Al operar en la integral de (6.94) encontramos que∫ ∆k
−∆ke−j(x−vg t )αdα= e−j(x−vg t )α
− j (x − vg t )
∣∣∣∣∆k
−∆k
= 2sen[∆k(x − vg t )
]x − vg t
,
obteniéndose así la siguiente expresión para nuestro paquete de ondas:
u(x, t ) = 2Bsen
[∆k(x − vg t )
]x − vg t
cos(ω0t −k0x) . (6.95)
Al analizar la forma matemática de la señal anterior, teniendo en cuenta que∆k ¿ k0, observamos en la Fig. 6.9 que el paquete de ondas puede verse como unaseñal portadora armónica de frecuencia ω0 cuya amplitud, A(·), está modulada,esto es,
u(x, t ) = A(x − vg t )cos(ω0t −k0x) . (6.96)
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.8. Grupo de Ondas 191
La señal resultante puede entonces considerarse como el producto de la señalportadora por una señal moduladora,
A(x − vg t ) = 2Bsen
[∆k(x − vg t )
]x − vg t
, (6.97)
que viaja sin distorsión apreciable a la velocidad vg definida en (6.91).
Dado que lo que se detectaría de la señal u(x, t ) sería la variación en su ampli-tud, esto es: A(x−vg t ), y ésta viaja a la velocidad vg , esta velocidad puede identifi-carse como la velocidad del grupo de ondas, por lo que se conoce como velocidadde grupo:
Velocidad de grupovg = dω
dk
∣∣∣∣k=k0
. (6.98)
La discusión anterior nos permite observar que una posible manera de trans-mitir información consistiría en la modulación de una señal portadora de núme-ro de ondas k0 y frecuencia ω0 por una señal moduladora que contiene un rangode frecuencias espaciales ∆k en el entorno de k0 y un rango de frecuencias tem-porales
∆ω=ω(k0 +∆k)−ω0 (6.99)
en torno a ω0. Notemos que si ω(k) es una función suave respecto a k, entoncesencontraremos que
∆ω¿ω0 . (6.100)
Al rango de frecuencias ∆ω se le denomina usualmente ancho de banda en fre-cuencia de la señal. Esta magnitud es muy importante en la práctica puesto quedetermina la “cantidad” de información que transmite una señal; por lo tanto, in-teresa aumentar el ancho de banda lo máximo posible. No obstante, según nosdice la expresión (6.100), para “soportar” señales moduladoras de gran ancho debanda es necesario que la frecuencia de la señal portadora sea bastante mayor quela de la señal moduladora. El interés en obtener señales portadoras con frecuen-cias lo más altas posibles (y que, consecuentemente, puedan “contener” más in-formación) es precisamente la motivación principal para usar señales luminosascomo ondas portadoras. Las señales luminosas tienen una frecuencia del ordende 1015Hz, por lo que permitirían ser moduladas por señales de muy alta frecuen-cia y con un gran contenido de información.
Es interesante resaltar que en un medio dispersivo la velocidad de grupo nocoincide con la velocidad de fase (vg 6= v) sino que usando (6.91) y (6.86), la veloci-dad de grupo puede escribirse en función de la longitud de onda como
vg = v −λdv
dλ, (6.101)
pudiendo ser esta velocidad de grupo mayor o menor que la velocidad de fase (enun medio no dispersivo vg = v). Si el medio es muy dispersivo, la envolvente delgrupo de ondas se distorsionará apreciablemente al propagarse. Desde un pun-to de vista práctico, esta distorsión se puede reducir disminuyendo el ancho debanda de la señal moduladora.
Por último es interesante mencionar que la anchura espacial del grupo de on-das, ∆x, se define como como la distancia entre los dos primeros mínimos deamplitud para t = 0 (si el medio no es muy dispersivo, un instante después, laamplitud habrá viajado una distancia vg t , pero la distancia entre mínimos ape-nas habrá variado). Los dos primeros mínimos de amplitud ocurren, según (6.95),para x =±π/∆k, por lo que
∆x = 2π
∆k
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
192 Tema 6. Ondas mecánicas
y consecuentemente se llega a la siguiente relación entre la anchura espacial, ∆x,y el ancho de banda en k, ∆k:
∆x∆k = 2π . (6.102)
6.9. Problemas propuestos
6.1: El rango de frecuencias de la ondas electromagnéticas utilizadas en emisoras comerciales (radioy TV) se extiende, aproximadamente, desde 104 Hz hasta 109 Hz. Si la velocidad de propagación de lasondas electromagnéticas en vacío es c = 3× 108 m/s, ¿cuál es el rango de longitudes de onda de lasemisoras comerciales? Repítase el problema anterior para el rango de señales acústicas audibles quese extiende, aproximadamente, desde 20 Hz hasta 20 kHz, considerando que el sonido es una onda depresión que se propaga en el aire a una velocidad aproximada de 340 m/s.Sol.: Ondas electromagnéticas comerciales: λ entre 30.000 m y 30 cm. Ondas sonaras audibles: λ entre17 m y 17 mm.
6.2: Demuestre explícitamente que el pulso descrito por la función
y(x, t ) = y0 exp
[−
(x − v t
x0
)2]
es solución de la ecuación de onda.
6.3: El cable de un telesquí de 80 kg de masa asciende 400 m por la ladera de una montaña. Cuandoel cable recibe un golpe transversal en un extremo, el pulso de retorno se detecta 12 s después. Calcularcuál es la velocidad de la onda y la tensión, T , en el cable. [Nota: la velocidad de la onda en la cuerdaviene dada por v =√
µ/T , siendo µ la densidad lineal de masa de la cuerda y T su tensión.]Sol. v = 66,7m/s, T = 889N.
6.4: Dos pulsos de onda que se mueven sobre una cuerda están representados por las siguientes fun-ciones de onda:
y1(x, t ) = 0.02
2+ (x −2t )2
y2(x, t ) = −0.02
2+ (x +2t )2,
donde x e y están en metros y t en segundos. a) Dibujar por separado cada onda en función de x parat = 0 y describir el comportamiento de ambas al aumentar en el tiempo. b) Hallar la función de ondaresultante para t = 0 y t = 1s. d) Dibujar la función de onda resultante en este último caso.
Sol. y(x,0) = 0, y(x,1) = 0.16x
36−4x2 +x4
6.5: Una onda armónica se mueve a lo largo de una cuerda uniforme e infinita bajo tensión constante.La cuerda esta marcada a intervalos de 1 m. En la marca de 0 m, se observa que la cuerda alcanza sudesplazamiento transversal máximo de 50 cm cada 5 s. La distancia entre máximos en un instante detiempo cualquiera es 50 m. Encontrar la expresión de su función de onda, suponiendo que es armónica,que tiene su desplazamiento máximo en x = 0 cuando t = 0, y que está moviendo a lo largo de la cuerdade izquierda a derecha.Sol. y = 0.5cos(2π/50)(x −10t )m.
6.6: La onda armónica en el hilo que se muestra en la figura tiene una amplitud de 25mm, una veloci-y x( )
l/8
xA
B
C
DE
dad de 46m/s, una frecuencia angular de 160 rad/s y se propaga hacia +x. En los elementos marcadospor letras, determine a) las componentes de velocidad; b) las componentes de aceleración; c) la pen-diente del hilo y d) ∂2 y/∂x2 .Sol.: a) 4.0,-4,-2
p2,0 (m/s); b)0.640,0,-320
p2,-640 (m/s2); c) -87,0,87,62,0 ; d) 0,0.3,0,-0.21,-0.3 m−1.
6.7: El desplazamiento transversal de una cuerda viene dado por una onda armónica de ecuacióny(x, t ) = 0.001sen(62.8x+314t ), estando x e y expresadas en metros y t en segundos. a) ¿En qué sentidose desplaza la onda? b) Hallar la longitud de onda, frecuencia y periodo de la misma. c) ¿Cuál es elmáximo desplazamiento de un segmento cualquiera de la cuerda?Sol.: a) hacia las x negativas; b) λ= 0.1m, f = 50Hz, T = 0.02s; c) 1 mm.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
6.9. Problemas propuestos 193
6.8: Dos ondas de la misma amplitud (A = 46 mm), frecuencia, velocidad y dirección de propagación,pero desfasadas entre sí, están presentes en un hilo, siendo la amplitud resultante 31 mm. ¿Cuál es ladiferencia de fase entre ambas ondas?Sol.: 140o.
6.9: Hallar la onda resultante de la superposición de tres ondas con la misma frecuencia, longitud deonda y amplitud, que se mueven en la misma dirección y sentido y que vienen dadas por
y1(x, t ) = 0.05sen(kx −ωt − π
3)
y2(x, t ) = 0.05sen(kx −ωt )
y3(x, t ) = 0.05sen(kx −ωt + π
3) .
Sol. y(x, t )) = 0.015sen(kx −ωt ).
6.10: Dos fuentes sonoras, accionadas en fase por el mismo amplificador están distantes 2m entre síen el eje y . En un punto a distancia muy grande del eje, se oye una interferencia constructiva para elángulo θ1 = 8o y la siguiente se oye a θ1 = 16o10′ respecto al eje x. Si la velocidad del sonido es de340 m/s, a) ¿cuál es la longitud de onda de las ondas sonoras procedentes de las fuentes; b) ¿cuál es lafrecuencia de las mismas?; c) ¿para qué otros ángulos se oye la interferencia constructiva?; d) ¿cuál esel ángulo más pequeño para el cual se contrarrestan entre sí por completo las ondas sonoras?Sol.: a) 0.278 m ; b) 1.22 kHz ;c) 24.7o,33.8o,44.1o,56.6o,77o ; d) 4o.
6.11: Dos ondas armónicas planas,y1(x, t ) = A cos(ωt −kx +φ1)
y2(x, t ) = A cos(ωt +kx +φ2)
interfieren dando lugar a una onda estacionaria. Determínese: a) la expresión de la onda estacionariaresultante; b) las posiciones de los planos nodales y ventrales en dos casos: b.1) φ1 = φ2 = 0 y b.2)φ1 = 0,φ2 =−π.Sol.: a) y(x, t ) = y1(x, t )+ y2(x, t ) = 2A cos[kx + (φ1 +φ2)/2]cos[ωt + (φ2 −φ1)/2];b.1) nodos: x = (2n +1)λ/4, vientres: x = nλ/2 (n entero);b.2) nodos: x = nλ/2, vientres: x = (2n +1)λ/4 (n entero).
6.12: En una columna de aire de longitud L = 2 m, abierta en sus dos extremos, se propagan ondassonoras del tipo
u(x, t ) =C cos(kx)cos(ωt )
(los extremos de la columna representan vientres para la onda sonora). Sabiendo que la frecuenciade su n-ésima armónica es 410 Hz y la frecuencia de su (n + 1) armónica es 492 Hz, determínese lavelocidad del sonido en el aire bajo estas condiciones.Sol.: v = 328 m/s.
6.13: Dos focos S1 y S2 emiten ondas esféricas de igual frecuencia:
y1(r1, t ) = (A1/r1)cos(ωt −kr1)
y2(r2, t ) = (A2/r2)cos(ωt −kr2)
respectivamente, donde r1 y r2 indican la distancia desde el punto considerado hasta los focos S1 y S2respectivamente. Calcúlese: a) la amplitud de la señal resultante en cada punto; b) los puntos en loscuales la amplitud resultante es máxima y en los que es mínima (exprésese el resultado en términos dela distancia de los puntos a los focos y de la longitud de onda).
Sol. a) A(r1,r2) = {(A1/r1)2 + (A2/r2)2 +2A1 A2 cos[k(r1 − r2)]/(r1r2)
}1/2; b) puntos de amplitud máxi-
ma: r1 − r2 = nλ, puntos de amplitud mínima: r1 − r2 = (2n +1)λ/2.
6.14: Un haz de luz monocromático que puede asimilarse a una onda plana que incide sobre unarendija larga de anchura a perpendicular a su dirección de propagación. a) Obtener la expresión parala anchura del máximo central de difracción en función de la longitud de onda y de la distancia, D ,de la pantalla de detección a la rendija. b) Utilizar el resultado anterior para encontrar la anchura delmáximo central cuando la luz de una lámpara de sodio (λ = 590 nm) es difractada por una rendija deanchura 0.3 mm, siendo la distancia de la pantalla a la rendija de 0.87 m.
Sol.: a) Anchura=2λD/√
a2 −λ2. b) 3.4 mm.
6.15: Dos ondas armónicas planas que se propagan en igual sentido interfieren dando lugar a unaonda plana que también se propaga en dicho sentido. Si las ecuaciones de dichas ondas son
y1(x, t ) = Asen(kx −ωt +φ1)
y2(x, t ) = Asen(kx −ωt +φ2) ,
obténgase la ecuación de la onda resultante de la interferencia, indicando en qué casos la amplitudresultante es máxima y en cuáles es mínima.Sol.: y(x, t ) = y1(x, t )+y2(x, t ) = 2A cos(∆φ/2)sen[kx−ωt+(φ1+φ2)/2)], siendo∆φ=φ2−φ1; Amplitudmáxima: ∆φ= 2nπ, mínima: ∆φ= (2n +1)π.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
194 Tema 6. Ondas mecánicas
6.16: Dadas dos ondas sonoras armónicas de distinta frecuencia:
u1(x, t ) = A cos[(ω0 −∆ω)t − (k0 −∆k)x]
u2(x, t ) = A cos[(ω0 +∆ω)t − (k0 +∆k)x] ,
a) obtenga la expresión de la superposición de dichas ondas. b) Si ∆k ¿ k0 y ∆ω ¿ ω0, represen-te gráficamente la onda. Si las ondas se propagan en un medio dispersivo determinado por ω(k) =vm
√k2 −k2
c , siendo vm = 200m/s, ω0 = 2π× 104 rad/s, ∆ω = 200πHz y kc = 100m−1, c) calcule losvalores de la velocidad de fase, v f , y velocidad de grupo, vg = (dω/dk)k=k0
, de la onda superposición.Sol.: a) u(x, t ) = 2A cos(∆ωt −∆kx)cos(ω0t −k0x); c) v f ≈ 190.6m/s, vg ≈ 209.9m/s.
6.17: Un LED típico que opera a una λ= 1.3µm y presenta una anchura de línea ∆λ= 100nm iluminauna fibra óptica “ideal”. Calcule: a) el ancho de banda en frecuencia, ∆ f , correspondiente a la anterioranchura de línea; b) ¿cuántos canales de vídeo podrían transmitirse por esta fibra si cada canal de videoocupa 10 MHz?; c) ¿cuántos canales de audio separados cada 10 kHz podrían transmitirse?Sol. a) ∆ f ≈ 1.8 ×107 MHz; b) ∼ 2 ×106 canales de vídeo; a) ∼ 2 ×109 canales de audio.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
TEMA 7
Termodinámica
7.1. Introducción
Un trozo de materia sólida, líquida o gaseosa no es más que un sistema de par-tículas compuesto por un enorme número de átomos o moléculas. En este sentidose podría pensar que para estudiar los procesos de interacción entre este trozo demateria y su entorno bastaría con aplicar los procedimientos ya vistos en el Te-ma 4. Aunque este procedimiento es posible, encontramos también que existenmultitud de procesos de interacción energética entre un trozo de materia y su en-torno que pueden ser estudiados sin considerar de forma explícita la estructuraatómica/molecular de la materia. El estudio de este tipo de procesos es el objetode la termodinámica
En sus principios, la termodinámica surgió del estudio de la producción detrabajo mecánico a partir de fuentes de calor, y su interés se centró en las apli-caciones técnicas de las máquinas térmicas. Actualmente, la termodinámica seha desarrollado hasta formar un cuerpo completo de doctrina que interviene conamplitud en los dominios de la física (fenómenos superficiales, pilas, termopares,magnetismo), de la química (reacciones químicas, equilibrios), de la ingeniería(fenómenos bioenergéticos), de la metereología (humedad, predicción del tiem-po), etc.
La termodinámica clásica estudia, en términos generales, aquellos fenómenosfísicos macroscópicos relacionados con el calor y la temperatura, limitándose alestudio de los estados de equilibrio y a las transformaciones que pueden repre-sentase por una serie continua de estados de equilibrio. Su campo abarca todoslos fenómenos inherentes a las transformaciones energéticas (calor en trabajo,por ejemplo) y sus efectos sobre los estados de la materia.
La termodinámica es una disciplina que, como la mecánica clásica y el electro-magnetismo, está basada en un número reducido de postulados básicos a partirde los cuales, mediante razonamientos lógicos, se deducen las leyes que gobier-nan los fenómenos caloríficos, objeto principal de esta ciencia. Estos principiosno pueden demostrarse mediante razonamientos matemáticos. Toda su validezdescansan la experiencia.
Durante el siglo XIX se establecieron dos importantes leyes que fueron llama-das primer y segundo principio de la termodinámica. Con el primer principio(Joule, 1843) se estableció la conexión entre el calor y el trabajo mecánico den-tro del enunciado general de la conservación de la energía. Mediante el segundo
195

CopiaUso
Académico
196 Tema 7. Termodinámica
principio (Carnot, 1824) se determina la dirección según la cual tienen lugar losprocesos termodinámicos y el estado de equilibrio de un sistema físico. En 1906,Nernst estableció el llamado tercer principio de la termodinámica, que fija un lí-mite a la temperatura termodinámica y a la entropía. Existe además un principiocero, que define el equilibrio térmico y da lugar al concepto de temperatura.
Estas leyes pueden expresarse en forma matemática, y a partir de ellas puedendeducirse muchas relaciones de gran interés práctico y teórico. Ningún fenómenofísico puede ir en contra de estos principios termodinámicos.
7.2. Conceptos básicos
7.2.1. Sistemas termodinámicos
Se denomina sistema termodinámico a la porción de espacio y su contenido,objeto de nuestro estudio. El sistema se encuentra situado en el interior de unasuperficie cerrada que lo separa del resto del Universo o medio ambiente. Estasuperficie puede ser real (por ejemplo, una gota de agua o un gas encerrado den-tro de un cilindro provisto de un émbolo) o ficticia (por ejemplo, un líquido quecircula por un tubo ilimitado). Las dimensiones del sistema deben ser suficiente-mente grandes para que se puedan definir en él propiedades macroscópicas.
Las superficies de separación o paredes del sistema pueden ser rígidas o defor-mables y a través de ellas pueden efectuarse intercambios de energía o de materiacon el medio ambiente. Una lámina metálica permite el flujo de calor: se trata deuna superficie diatérmica. En cambio, una superficie de separación constituidapor una sustancia aislante es impermeable a la energía térmica: decimos enton-ces que la superficie es adiabática. Un sistema en estas condiciones sólo puedecambiar de estado por medio del trabajo. Un recubrimiento de hormigón o unvaso Dewar son buenas aproximaciones de paredes adiabáticas. El sistema se lla-ma cerrado cuando sólo se efectúan transferencias de energía (calor y trabajo), yabierto, cuando a través de sus paredes se realizan intercambios de energía y demateria. El sistema es aislado cuando no intercambia ni energía ni materia consus alrededores.
Los sistemas se clasifican también en homogéneos y heterogéneos. Un siste-ma es homogéneo cuando sus propiedades físicas o químicas son las mismas entodos los puntos del mismo. Por ejemplo, una disolución diluida, un gas, un só-lido puro, etc. Un sistema es heterogéneo cuando está formado por subsistemashomogéneos de propiedades físicas distintas. Por ejemplo, una disolución satu-rada de sal en agua, una mezcla de hielo con agua, un líquido en ebullición enpresencia de su vapor, etc. Cada una de las partes de un sistema heterogéneo conpropiedades físicas constantes constituye una fase.
7.2.2. Variables termodinámicas y funciones de estado
En mecánica, el estado de un sistema viene definido por una serie de coorde-nadas espaciales y de velocidad; con estas coordenadas se determina su energíacinética y potencial. El estado de un sistema electromagnético se define por ladependencia de la intensidad de los campos eléctricos y magnéticos con las coor-denadas espaciales. En termodinámica la descripción del estado de un sistema serealiza mediante los valores que poseen determinadas propiedades macroscópi-cas, denominadas variables o coordenadas termodinámicas, tales como el vo-lumen, la presión, la temperatura, la densidad o la composición química. Todas
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
7.2. Conceptos básicos 197
ellas, en general, pueden medirse directamente y para su comprensión no se exi-gen hipótesis especiales sobre la estructura de la materia. La ausencia del tiempoy el espacio en los razonamientos termodinámicos lleva consigo la no apariciónen la termodinámica de ecuaciones diferenciales, lo que simplifica ampliamentelos cálculos.
No todas las variables son independientes; la experiencia nos dice que bas-ta conocer los valores de un pequeño número de variables para caracterizar elsistema. Estas variables independientes se denominan variables de estado y lasrestantes variables pueden expresarse en función de aquellas. Una masa dada deun fluido homogéneo puede expresarse mediante un par de variables indepen-dientes, que normalmente se eligen entre la presión, el volumen y la temperatura.
Toda función que puede expresarse con ayuda de las variables de estado sedenomina función de estado del sistema. Así ocurre con la energía interna (U ),la entalpía (H) o la entropía (S). En cambio, el calor y el trabajo no son funcionesde estado, sino funciones de proceso. La variación experimentada por una fun-ción de estado es independiente del proceso que conecta dos estados específicosy queda perfectamente definida por el simple conocimiento del estado inicial yfinal.
7.2.3. Estados de equilibrio
La experiencia nos dice que un sistema determinado puede alcanzar un es-tado en el cual las variables macroscópicas toman un valor constante, indepen-diente del tiempo; se dice que el sistema se encuentra entonces en un estado deequilibrio termodinámico. Podríamos decir que el equilibrio es aquel estado ha-cia el cual tiende un sistema espontáneamente. Una vez alcanzado, las magni-tudes termodinámicas del sistema son independientes del tiempo. El equilibriotermodinámico conlleva tres aspectos: debe haber equilibrio químico, mecánicoy térmico.
Un sistema en equilibrio químico es aquel en el que no hay reacciones y to-das las partes del sistema conservan inalteradas su composición. El equilibriomecánico se alcanza cuando tanto en el interior del sistema, como entre él y elmedio de que lo rodea, no se ejercen fuerzas netas. En un fluido esto se mani-fiesta en que la presión permanece constante. Para ilustrar el equilibrio térmicoconsideremos dos sistemas en equilibrio mecánico y químico separados por unapared adiabática. Si sustituimos la pared adiabática por una diatérmica, las va-riables termodinámicas cambian espontáneamente hasta alcanzar un equilibrioconjunto. Ese equilibrio es el equilibrio térmico: no hay cambios espontáneos enlas variables de los dos sistemas comunicados por una pared diatérmica. Esto sig-nifica que ambos están a la misma temperatura.
Cuando un sistema homogéneo está en equilibrio termodinámico, entre susvariables existe una relación llamada ecuación de estado. En gases y líquidos pu-ros estas variables son la presión (p), el volumen (V ), y la temperatura (T ), y laecuación de estado es del tipo f (p,V ,T ) = 0.
7.2.4. Procesos termodinámicos
Se dice que un sistema experimenta un proceso termodinámico cuando al mo-dificar una ligadura interna o externa, alguna de sus variables de estado se modifi-ca con el tiempo. Los estados inicial y final del proceso se consideran en equilibrio.Si a lo largo del proceso permanece constante alguna de las variables, el proceso
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
198 Tema 7. Termodinámica
se denomina:
isóbaro, cuando p es constante;
isócoro, cuando V es constante;
isotermo, cuando T es constante;
adiabático, cuando no hay intercambio de calor con el exterior.
Un proceso se denomina cuasiestático cuando los estados intermedios de sutrayectoria son también estados de equilibrio. Esto significa que en cualquier ins-tante, el sistema en evolución puede definirse por medio de variables macroscó-picas y la ecuación de estado sigue siendo válida. Si, además, es posible invertirexactamente la transformación modificando infinitesimalmente las condicionesexteriores, se dice que el proceso es reversible. Cuando los estados intermediosdel proceso no son de equilibrio, el proceso es irreversible.
Por ejemplo, si tenemos un gas encerrado en un cilindro a una presión p yexteriormente se aplica una presión P , obviamente, si P > p, el gas se compri-mirá hasta que la presión interior iguale a la exterior: el proceso será irreversi-ble. Para imaginar el proceso reversible volvamos al estado inicial y supongamosque ambas presiones son iguales, P = p: existe equilibrio y no se verificará nin-gún proceso. Si ahora aumentamos infinitesimalmente la presión exterior, P +dP(por ejemplo, dejando caer arena grano a grano sobre el émbolo), se produce unapequeña comprensión del gas y se alcanza un nuevo estado de equilibrio caracte-rizado por P +dP = p +d p. Disminuyendo en la misma proporción infinitesimalla presión exterior, el gas se dilata y el proceso se invierte. Este proceso puede irprogresando en una dirección u otra mediante una sucesión de cambios infinite-simales hasta alcanzar un estado final de equilibrio. En cambio, si sobre el émbolose aplica una presión muy superior a la del gas, este se comprimirá bruscamentey la masa gaseosa experimentará una sucesión de estados complejos que escapana toda descripción macroscópica: el proceso es irreversible.
Los estados de equilibrio de un sistema termodinámico homogéneo puedenpresentarse mediante un punto en un diagrama bidimensional. En el caso de unsistema hidrostático, caracterizado por las variables p, V y T , estos diagramaspueden ser de tres tipos, pT , V T y pV . Este último, denominado también dia-grama de Clapeyron será el que usaremos con más frecuencia. Los procesos cua-siestáticos pueden representarse en estos diagramas como una línea uniendo dosestados estados de equilibrio. En cambio, los procesos irreversibles no podrán re-presentarse debido a que los estados intermedios no son de equilibrio.
7.3. Equilibrio térmico y temperatura
7.3.1. Principio cero
Suele decirse que la temperatura es una medida del grado de calor o frío de loscuerpos. Normalmente, nuestro sentido del tacto puede decirnos si un objeto estácaliente o frío. Desde la infancia se aprende que para conseguir que un objeto fríose caliente, basta con ponerlo en contacto con un objeto caliente. Y para enfriarun cuerpo caliente lo hemos de poner en contacto con un cuerpo frío.
Cuando un cuerpo se calienta o enfría, cambian algunas de sus propiedadesfísicas. Por ejemplo, la mayor parte de los sólidos y de los líquidos se dilatan al ca-
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
7.3. Equilibrio térmico y temperatura 199
lentarse. Un gas, si su presión permanece constante, también se expandirá cuan-do se caliente, o bien, si su volumen permanece constante, aumentará su presión.Si se calienta un conductor eléctrico, variará su resistencia eléctrica. Una propie-dad física que varía con la temperatura se denomina propiedad termométrica.Un cambio en una propiedad termométrica indica que se ha producido una va-riación de temperatura en el objeto.
Supongamos que colocamos una barra caliente de cobre en contacto con unabarra fría de hierro. La barra de cobre se contrae ligeramente, indicando que seestá enfriando, mientras que la barra de hierro se dilata ligeramente, lo que indi-ca que se está calentando. Se dice que ambas barras están en contacto térmico.Finalmente este proceso termina; es decir, ninguna de las dos barras varía pos-teriormente de longitud. Cuando esto ocurre se dice que las dos barras están enequilibrio térmico entre sí. Supongamos ahora que introducimos la barra de co-bre caliente en una corriente de agua fría. La barra se enfría, contrayéndose hastaalcanzar el equilibrio térmico con el agua. A continuación introducimos la ba-rra de hierro fría en la corriente, lejos de la barra de cobre. La barra de hierro secalentará hasta alcanzar el equilibrio térmico con el agua. Si ahora sacamos lasbarras y las colocamos en contacto una con otra, observaremos que sus longitu-des no cambian. Ambas están en equilibrio térmico entre sí. Aunque este hechoes de sentido común, no existe ningún procedimiento lógico para su deducción.Constituye el principio cero de la termodinámica (ver Figura 7.1):
Si dos objetos están en equilibrio térmico con un tercero, entoncesestán en equilibrio térmico entre sí.
Principio Cero de la Termodinámica
FIGURA 7.1: Ilustración del Principio Cero de la Termodinámica. (a) Los sistemasA y B están en contacto térmico con el sistema C, pero no entre sí. Cuando A y Bestán cada uno en contacto térmico con C, están mutuamente en equilibrio,como puede comprobarse colocándolos en contacto entre sí (b).
Se dice que dos objetos tienen la misma temperatura cuando están en equi-librio térmico entre sí. Como veremos, el principio cero nos permite definir unaescala de temperatura.
7.3.2. Escalas de temperatura Celsius y Fahrenheit
Para establecer una escala de temperatura se puede utilizar cualquier propie-dad termométrica. Un termómetro común de mercurio está compuesto por unbulbo y un tubo de vidrio que contienen una cantidad fija de mercurio. Cuandose calienta el mercurio al colocar el termómetro en contacto con el cuerpo máscaliente, el mercurio se dilata más que el vidrio y aumenta la longitud de la co-lumna de mercurio. Podemos crear una escala de temperatura a lo largo del tubode la manera siguiente: primero se coloca el termómetro en una mezcla de hielo
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
200 Tema 7. Termodinámica
y agua en equilibrio a una presión de 1 atm; cuando el termómetro está en equili-brio con el hielo y el agua, se marca la posición de la columna de mercurio sobreel tubo de vidrio: este es el punto del hielo o punto de fusión normal del agua; acontinuación se coloca el termómetro en agua hirviendo a una presión de 1 atmy, cuando el termómetro queda en equilibrio térmico con el agua hirviendo, semarca la nueva posición de la columna de mercurio: este es el punto del vapor opunto de ebullición normal del agua.
La escala Celsius de temperatura define el punto de fusión normal del aguacomo cero grados Celsius (0ºC) y la temperatura del punto de ebullición normaldel agua como 100ºC. El espacio de la columna entre las marcas 0ºC y 100ºC sedivide en 100 intervalos iguales (grados). Las marcas de los grados se extiendenpor debajo y por encima de estos puntos. Si Lt es la longitud de la columna demercurio, la temperatura Celsius, tC , viene dada por
tC = Lt −L0
L100 −L0×100ºC (7.1)
donde L0 es la longitud de la columna de mercurio cuando el termómetro estádentro del baño de hielo, y L100 es su longitud cuando el termómetro está en elbaño de vapor. La temperatura normal del cuerpo humano medido en la escalaCelsius es aproximadamente 37ºC.
En la escala de temperatura Fahrenheit (usada comúnmente en los paísesde habla inglesa) se define como 32ºF la temperatura del punto del hielo y co-mo 212ºF la el punto del vapor.1 Obsérvese que entre la temperatura del puntodel hielo y la del punto de vapor hay 100 grados Celsius y 180 grados Fahrenheit.Un cambio de temperatura de un grado Celsius es equivalente a un cambio de180/100 = 9/5 grados Fahrenheit. Para convertir una temperatura dada en unaescala a la otra debemos tener también en cuenta que las temperaturas cero deambas no son iguales. La relación general entre una temperatura Fahrenheit tF yuna temperatura Celsius tC es
tC = 5
9(tF −32º) (7.2)Conversión Fahrenheit–Celsius
7.3.3. Termómetros de gas y la escala Kelvin de temperatura
Cuando calibramos dos termómetros diferentes, de modo que coincidan en0ºC y 100ºC, podrían no coincidir exactamente a temperaturas intermedias o porencima o por debajo de ese rango de temperaturas. Cualquier escala de tempe-ratura definida de este modo, siempre dependerá de las propiedades específicasdel material empleado. Idealmente, nos gustaría definir una escala que no depen-da de las propiedades de un material específico. Para establecer una escala total-mente independiente del material, necesitamos desarrollar algunos principios determodinámica. Volveremos a este problema fundamental posteriormente. Aquíveremos un termómetro que se acerca al ideal: el termómetro de gas. El principiode un termómetro de gas establece que la presión de un gas a volumen constan-te aumenta con la temperatura. Una cantidad de gas se coloca en un recipiente
1 Cuando el físico alemán Daniel Fahrenheit ideó su escala de temperatura, quería que todas las tem-peraturas mensurables fuesen positivas. Originalmente, escogió 0ºF para la temperatura más bajaque pudo obtener con una mezcla de hielo y agua salada, y 96ºF (un número conveniente con mu-chos divisores) para la temperatura del cuerpo humano. Luego modificó su escala ligeramente paraconseguir que el punto del hielo y del vapor fueran números enteros. Esto dio como resultado quela temperatura del cuerpo humano estuviese comprendida entre 98ºF y 99ºF.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
7.4. Calor 201
de volumen constante y se mide su presión. Para calibrar el termómetro, se tomala presión a dos temperaturas, digamos 0ºC y 100ºC, representando gráficamen-te esos puntos y se traza una línea recta entre ellos. Así, podemos deducir de lagráfica la temperatura correspondiente a cualquier otra presión. La figura mues-tra los resultados de tres experimentos de este tipo, utilizando en cada caso unaclase y cantidad distinta de gas. Si extrapolamos las líneas, veremos que hay unatemperatura hipotética, -273,15ºC, en la que la presión absoluta del gas sería cero.Podríamos esperar que tal temperatura fuera diferente para diferentes gases, peroresulta ser la misma para muchos gases distintos (al menos, cuando el límite dedensidad del gas es muy bajo).2
Usamos esta temperatura extrapolada a presión cero como base para una es-cala de temperatura con su cero en esta temperatura: la escala de temperaturaKelvin o del gas ideal. Las unidades tienen el mismo tamaño que las de la escalaCelsius, pero el cero se desplaza de modo que 0 K=-273,15ºC, es decir,3
T = tC +273,15 . (7.3) Conversión Celsius–Kelvin
La escala Celsius tiene dos puntos fijos, los puntos de fusión y ebullición nor-males del agua, pero podemos definir la escala Kelvin usando un termómetro degas con sólo una temperatura de referencia. Definimos el cociente de dos tempe-ratura T1 y T2 en la escala Kelvin, como el cociente de las presiones correspon-dientes de termómetros de gas p1 y p2:
T2
T1= p2
p1
ya que la presión p es directamente proporcional a la temperatura Kelvin, tal co-mo se mostró anteriormente. Para completar la definición de T sólo necesitamosespecificar la temperatura Kelvin de un solo estado específico. Por razones de pre-cisión y reproducibilidad, el estado escogido es el punto triple del agua. Esta esuna combinación única de temperatura y presión en la que pueden coexistir hie-lo, agua líquida y vapor de agua. Esto ocurre a 0,01ºC con una presión de vaporde agua de 610 Pa. La temperatura del punto triple del agua es, por definición,T3 = 273,16K que corresponde a 0,01ºC. Por la ecuación anterior, si p3 es la pre-sión en un termómetro de gas a la temperatura T3 y p es la presión a otra tempe-ratura T , entonces T está dada en la escala Kelvin por
T = p
p3T3 . (7.4)
La escala Kelvin se denomina también escala de temperatura absoluta y sucero [T =0 K=-273,15 ºC, la temperatura en que p = 0 en la ecuación (7.4)] se llamacero absoluto. Para definir de forma más completa el cero absoluto, necesitare-mos los principios termodinámicos que serán desarrollados posteriormente.
7.4. Calor
En el Tema 3 mencionamos brevemente cómo se transforma la energía me-cánica en calor cuando actúa una fuerza no conservativa, como por ejemplo el
2 No podemos observar realmente esta condición de presión cero, pues los gases se licúan y solidifi-can a temperaturas muy bajas, y la presión deja de ser proporcional a la temperatura.
3 En el Sistema Internacional, no se usa grado con la escala Kelvin.
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
202 Tema 7. Termodinámica
rozamiento. En este apartado presentaremos algunos conceptos fundamentalesacerca de la relación entre energía y temperatura.
Hasta aproximadamente 1850, se consideraba que los campos de la mecánicay la termodinámica eran dos ramas diferentes de la ciencia, y el principio de laconservación de la energía parecía describir sólo cierto tipo de sistemas mecáni-cos. Los experimentos realizados principalmente por el físico inglés James P. Joule(1818-1889) demostraron que la energía podía ser absorbida o cedida por un siste-ma en forma de calor o en forma de trabajo. Hoy en día, se entiende que la energíainterna es una forma de energía que puede transformarse en energía mecánica yviceversa. Una vez que se extiende el concepto de energía para incluir a la energíainterna, el principio de la conservación de la energía pasa a ser una ley universal.
A continuación desarrollaremos el concepto de calor, ampliaremos el concep-to de trabajo a los procesos térmicos y presentaremos el primer principio de latermodinámica y estudiaremos algunas aplicaciones del mismo.
7.4.1. Definición de calor. Unidades
Anteriormente se introdujo el calor como una variable de proceso, constitu-yendo un medio de intercambio de energía. Una definición formal de calor podríaser la siguiente:
el calor es un mecanismo mediante el cual la energía se transfiere en-tre un sistema y su entorno como consecuencia de una diferencia detemperatura entre ellos; también es la cantidad de energía, Q, trans-ferida a través de este mecanismo.
Supongamos un recipiente con agua que está en contacto con una llama. Laenergía se transfiere al agua en forma de calor que proviene de los gases a altatemperatura de la llama y, como resultado, la temperatura del agua aumenta. Esincorrecto decir que el agua “aumenta su calor”, ya que el calor es una cantidad deenergía transferida al sistema. No tiene sentido usar el término calor a menos quehaya habido una transferencia de energía como consecuencia de una diferenciade temperatura.
En los comienzos de la termodinámica, antes de que los científicos descubrie-ran la relación entre los procesos mecánicos y termodinámicos, el calor se definíaen términos de las variaciones de temperatura que se producían en un objeto, yse utilizaba una nueva unidad de energía para dicha magnitud, la caloría. Esta sedefine como el calor necesario para elevar la temperatura de 1 gramo de agua de14,5ºC a 15,5ºC. En 1948, se acordó que, dado que el calor (como el trabajo) esuna medida de la transferencia de energía, su unidad en el Sistema Internacionaldebía ser el julio. Actualmente, la caloría se define de la forma
1 cal = 4.186 J . (7.5)Equivalente mecánico del calor
Esta definición de la caloría recibe el nombre de equivalente mecánico delcalor. Obsérvese que esta definición no hace ninguna referencia al calentamientodel agua.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
7.4. Calor 203
7.4.2. Calor específico
La definición de caloría indica que la cantidad de energía necesaria para ele-var un grado la temperatura de un gramo de una sustancia específica, el agua, es4,186 J. Para elevar un grado la temperatura de un kilogramo de agua, se nece-sita transferir 4186 J de energía. La cantidad de energía necesaria para elevar ungrado la temperatura de un kilogramo de una sustancia cualquiera depende de lasustancia en cuestión. Por ejemplo, la energía necesaria para elevar 1ºC la tempe-ratura de un kilogramo de cobre es 387 J, que es significativamente menor que laque se necesita en el caso del agua. Cada sustancia necesita una cantidad concre-ta de energía por unidad de masa para variar en un 1ºC la temperatura de dichasustancia.
Supongamos que se transfiere una cantidad de energía Q a una masa m deuna determinada sustancia, originando como consecuencia un cambio de tem-peratura ∆T . El calor específico, c, de la sustancia se define como
c = Q
m∆T. (7.6) Calor específico
Las unidades de calor específico son J/kg·K. A partir de la definición de calo-ría, deduce que el calor específico del agua es 4186 J/kg·K. Teniendo en cuenta ladefinición anterior, podemos expresar la cantidad de energía Q transferida entreun sistema de masa m y su entorno en función de la variación de temperaturaresultante ∆T como
Q = mc∆T .
Obsérvese que cuando la temperatura aumenta, ∆T y Q se consideran positivos,lo que corresponde a una energía que entra en el sistema. Cuando la temperaturadisminuye, ∆T y Q se consideran negativos y la energía sale del sistema.
El calor específico es una variable intensiva. Se puede definir una variable ex-tensiva, la capacidad calorífica, de la forma C = mc, cuya unidad en el SistemaInternacional es J/K. Otra variable intensiva de gran utilidad es el calor especí-fico molar, c ′, definido como c ′ = C /n, siendo n el número de moles. Según laLey de Dulong y Petit, los calores específicos molares de la mayoría de los sólidoselementales son casi iguales, alrededor de 25 J/mol·K. La tabla adjunta muestra elcalor específico de algunas sustancias.
Sustancia c c ′J/kg·K J/mol·K
Agua 4186 75.2Alcohol etílico 2400 111Aluminio 900 24.3Bismuto 123 25.7Cobre 386 24.5Hielo (-10 ºC) 2050 36.9Mercurio 140 28.3Oro 126 25.6Plata 233 24.9Plomo 128 26.4Wolframio 134 24.8Vidrio 840 —Zinc 387 25.2
El calor específico del agua es considerablemente mayor que el de las demássustancias. Debido a ello, el agua es un material excelente para almacenar energíatérmica, como ocurre en un sistema de energía solar, y también es un excelenterefrigerante, como sucede en el motor de un automóvil. Una gran masa de agua,como un lago o un océano, tiende a moderar las variaciones de temperatura delaire de sus cercanías porque puede absorber o desprender grandes cantidades deenergía térmica experimentando cambios de temperatura pequeños.
7.4.3. Calor latente y transiciones de fase
Las sustancias sufren a menudo una variación de temperatura cuando se trans-fiere energía entre la sustancia y su entorno. Sin embargo, en algunas situaciones,la transferencia de energía no provoca una variación de temperatura. Esto puedeocurrir cuando las características físicas de una sustancia cambian entre un es-tado y otro, lo que comúnmente se denomina transición de fase. Algunas de lastransiciones de fase más comunes son: de sólido a líquido (fusión), de líquido a
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
204 Tema 7. Termodinámica
gas (vaporización) y los cambios en la estructura cristalina de un sólido. Todas es-tas transiciones de fase necesitan una transferencia de energía, pero no producenuna variación de la temperatura.
La transferencia de energía necesaria para que se produzca un cambio de faseen una masa m de una sustancia pura es
Q =±mL (7.7)
donde L se denomina calor latente de la sustancia y depende tanto de la natura-
Calor latente
leza del cambio de fase como de la propia sustancia. El signo de la ecuación debeseleccionarse de acuerdo con la dirección en la que fluya la energía. Cuando unbloque de hielo se funde para transformarse en agua, debe elegirse el signo posi-tivo; en el caso de que el agua líquida se congele para transformarse en hielo, seestá extrayendo energía del agua, por lo que debemos utilizar el signo negativo.
El calor latente de fusión, L f , es el término que se utiliza cuando el cambiode fase en cuestión se refiere a una fusión o a una solidificación, y el calor laten-te de vaporización, Lv , es el término que se utiliza cuando el cambio de fase serefiere a una vaporización o una condensación. Por ejemplo, en el caso del agua,L f =79 cal/g y Lv =540 cal/g. La tabla adjunta muestra el calor latente de fusión yvaporización, así como los puntos de fusión (PF) y puntos de ebullición (PE) paravarias sustancias a 1 atm.
Sustancia PF L f PE LvK kJ/kg K kJ/kg
Agua 273.15 333.5 373.15 2257Azufre 388 38.5 717.75 287Bromo 266 67.4 332 369Cobre 1356 205 2839 4726Etanol 159 109 351 879Mercurio 234 11.3 630 296Nitrógeno 63 25.7 77.35 199Oro 1336 62.8 3081 1701Oxígeno 54.4 13.8 90.2 213Plata 1234 105 2436 2323Plomo 600 24.7 2023 858Zinc 692 102 1184 1768
7.5. Trabajo y calor en procesos termodinámicos
En el presente contexto definiremos
el trabajo como la transferencia de energía entre el sistema y el en-torno que puede atribuirse al efecto de una fuerza macroscópica yun desplazamiento colectivo neto de las partículas que constituyenel sistema.
Consideremos un gas en equilibrio térmico contenido en un recipiente cilín-drico cerrado mediante un pistón móvil y sin rozamiento de área A, como el quemuestra la figura. En equilibrio, el gas ocupa un volumen V y ejerce una presiónuniforme p sobre las paredes del cilindro y del pistón. La fuerza ejercida por el gassobre el pistón es p A. Supongamos que el gas se expande cuasi-estáticamente, esdecir, lo suficientemente despacio para conseguir que el sistema esté en equili-brio térmico en todo momento. Cuando el pistón se mueve una distancia dy , eltrabajo realizado por el gas sobre el pistón es
dWg = F dy = p Ady .
Dado que Ady es la variación de volumen del gas dV , podemos expresar el trabajorealizado por el gas como
dWg = pdV (7.8)
y, por tanto, el trabajo externo realizado sobre el gas como
dW =−pdV . (7.9)Trabajo infinitesimalrealizado sobre el gas
Cuando el gas se expande, dV es positivo, y el trabajo realizado por el gas tam-bién lo será. Si el gas se comprimiera, dV sería negativo, indicando que el trabajo
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
7.5. Trabajo y calor en procesos termodinámicos 205
realizado por el gas (que puede interpretarse como que el trabajo se realiza sobreel gas) sería negativo. En los problemas termodinámicos que vamos a resolver,identificaremos el sistema de interés como una sustancia que intercambia ener-gía con el entorno. El trabajo realizado sobre el sistema (gas) cuando su volumencambia de Vi a V f vendrá entonces dado por la siguiente integral:
W =−∫ V f
Vi
p dV . (7.10) Trabajo realizado sobre el sistema
Para evaluar esta integral no basta con saber los valores iniciales y finales dela presión: debemos conocer también la presión en cada instante durante la ex-pansión; es decir, la relación funcional de p respecto a V [p como p(V )]. Paraespecificar totalmente un proceso, debemos conocer los valores de las variablestermodinámicas en todos los estados a través de los cuales el sistema ha pasadoentre los estados inicial y final. En la expansión que consideramos aquí podemosdibujar la presión y el volumen en cada instante para crear un diagrama PV comoel que se muestra en la figura adjunta.
El valor de la integral de la ecuación (7.10) es el área situada bajo la curva (consigno negativo). Así, podemos decir que el trabajo realizado por un gas en un pro-ceso cuasi-estático que lo lleve desde un estado inicial a un estado final es igualal área situada bajo la curva del diagrama pV , evaluada entre los estados inicial yfinal.
Como muestra la figura anterior, el trabajo realizado en la expansión desde elestado inicial i al estado final f depende del camino seguido entre estos dos es-tados, donde el camino en el diagrama pV es una descripción del proceso termo-dinámico que sigue el sistema. Para ilustrar este punto importante, consideremosvarios caminos que conecten i con f (ver Fig. 7.2). En el proceso dibujado en la
FIGURA 7.2: El trabajo realizado por un gas para llevarlo de un estado inicial a unestado final depende de la trayectoria seguida entre dichos estados.
Fig. 7.2(a), la presión del gas disminuye, en primer lugar, desde Pi hasta P f me-diante un enfriamiento a volumen constante Vi . El gas se expande a continuacióndesde Vi hasta V f a presión constante P f . El valor del trabajo realizado a lo largode esta trayectoria es igual al área del rectángulo sombreado, es decir, P f (V f −Vi ).En la Fig. 7.2(b), el gas se expande en primer lugar desde Vi hasta V f a presiónconstante Pi . A continuación, la presión se reduce hasta P f a volumen constan-te V f . El valor del trabajo realizado siguiendo esta trayectoria es Pi (V f −Vi ), quees mayor que el del proceso descrito en la Fig. 7.2(a). Finalmente, en el procesodescrito en la Fig. 7.2(c), donde tanto p como V cambian de manera continua, eltrabajo realizado tiene un valor intermedio entre los valores obtenidos en los pro-cesos anteriores. Por tanto, podemos ver que el trabajo realizado por un sistema
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
206 Tema 7. Termodinámica
depende del estado inicial y final, así como de la trayectoria seguida por el sistemaentre ambos estados.
7.6. Primera Ley de la Termodinámica
Cuando estudiamos la energía interna en el Apartado 4.4.2 llegamos a la expre-sión (4.51) que nos relacionaba el trabajo de las fuerzas externas sobre un sistemacon la variación de su energía interna y de la energía cinética orbital del siste-ma. Si suponemos que energía cinética orbital del sistema no cambia, la relacióntrabajo–energía que nos queda puede expresarse como
Wext =∆U (7.11)
donde U es la energía interna, que en presente contexto podemos definirla como
energía interna es la energía que está asociada a los movimientosaleatorios de traslación, vibración y rotación de los átomos y molé-culas que componen una sustancia, así como a las fuerzas intermole-culares.
En los apartados anteriores hemos visto dos modos en los que la energía pue-de transferirse entre un sistema y sus alrededores; es decir, dos modos en los quese puede realizar el trabajo externo Wext. Uno de ellos es el que hemos denomi-nado de forma genérica “trabajo realizado por el sistema”, que requiere que hayaun desplazamiento del punto de aplicación de la fuerza. La otra forma de realizartrabajo externo es lo que se ha denominado “calor,” Q, que ocurre debido a unadiferencia de temperaturas. Dado que Wext =W +Q, ambos mecanismos resultanigualmente en un cambio de la energía interna del sistema, y, por tanto suelenprovocar un cambio medible en las variables macroscópicas del sistema, tales co-mo la presión, la temperatura y el volumen de un gas.
La aplicación de la expresión (7.11) con las consideraciones anteriores nos di-ce entonces que
∆U =Q +W . (7.12)
que constituye la primera ley de la termodinámica y que no es más que una forma
Primera Ley de la Termodinámica
de expresar la ley de conservación de la energía aplicada a sistemas con muchaspartículas. Esta ley nos dice entonces que
El cambio en la energía interna de un sistema es igual a la transferen-cia de calor desde el entorno al sistema más el trabajo realizado sobreel sistema.
Para comprender estas ideas de forma cuantitativa, supongamos un sistemaque experimenta un cambio desde un estado inicial a un estado final. Durante es-te cambio, se transfiere al sistema una cantidad de calor Q, y sobre el sistema serealiza un trabajo W . Por ejemplo, supongamos que el sistema es un gas en el quela presión y el volumen cambian desde Pi y Vi hasta P f y V f . Si se mide la canti-dad Q +W para diferentes caminos que conecten los estados de equilibrio inicialy final, encontramos que es la misma para todos los caminos que conectan los dosestados. Podemos entonces concluir que la cantidad Q+W determina totalmentelos estados inicial y final del sistema, y llamamos a dicha cantidad variación dela energía interna del sistema. Aunque Q y W dependen del camino, la cantidadQ +W se encuentra que es independiente de la trayectoria. Recordemos que usa-remos el convenio que Q > 0 cuando el calor entra en el sistema y Q < 0 cuando
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
7.7. El gas ideal 207
sale; por otro lado, W < 0 cuando el sistema realiza el trabajo sobre el medio yW > 0 cuando el trabajo es realizado sobre el sistema.
Cuando un sistema experimenta un cambio infinitesimal en su estado, de mo-do que se transfiere una cantidad infinitesimal de calor d–Q y el sistema realizauna cantidad infinitesimal de trabajo d–W , la energía interna también varía enuna cantidad infinitesimal dU . Por tanto, en procesos infinitesimales podemosexpresar el primer principio como
dU = dQ +dW . (7.13) Forma diferencial de la Primera Leyde la Termodinámica
En la práctica no hay ninguna diferencia a escala microscópica entre el resul-tado de transferir energía mediante trabajo o mediante calor. Ambas formas pue-den producir una variación en la energía interna del sistema. Aunque las magni-tudes macroscópicas Q y W no pueden considerarse propiedades de un sistema,sí que se relacionan con las variaciones de energía interna de un sistema esta-cionario a través de la Primera Ley. Una vez que se ha definido un proceso o unatrayectoria entre dos estados, tanto Q como W se pueden calcular o medir, y lavariación de energía interna se puede obtener a partir de la Primera Ley. Una delas consecuencias importantes de esta ley es, por tanto, que existe una magnitudllamada energía interna cuyo valor está determinado por el estado del sistema;esto es, la energía interna es una función de estado.
Es interesante notar que existen muchas situaciones en las que la primera leyde la termodinámica se expresa de una forma más conveniente en función de unanueva función de estado denominada entalpía, H , que se define como
EntalpíaH =U +pV . (7.14)
Teniendo en cuenta quedH = dU +pdV +V dp (7.15)
y quedU = dQ −pdV (7.16)
al combinar ambas igualdades llegamos a la siguiente expresión alternativa de laprimera ley de la termodinámica:
dH = dQ −pdV +pdV +V dp
= dQ +V dp . (7.17)
Esta ley implica entonces que en aquellos procesos que se realizan a presiónconstante, dp = 0 (tales como la mayoría de las reacciones químicas y los procesosbiológicos), tenemos que
dH = dQ (7.18)
o, equivalentemente,∆H =Q (p = Cte) . (7.19)
La expresión anterior nos dice que un proceso a presión constantes, la variaciónde entalpía del sistema es igual al calor transferido a dicho sistema.
7.7. El gas ideal
7.7.1. Ecuación de estado del gas ideal
Como vimos en el Apartado 7.2.2, no todas las propiedades de una sustanciapura pueden tomar valores arbitrarios. En el caso de un gas, entre las propiedades
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
208 Tema 7. Termodinámica
p, V , T y el número de moles n existe una relación
f (p,V ,T,n) = 0
que constituye su ecuación de estado. En general, la ecuación de estado varía deuna sustancia a otra. Sólo en algunos casos, como ocurre con los gases ideales,podemos obtener una ecuación de estado válida para todos ellos. Esta ecuaciónes la siguiente:
pV = nRT (7.20)
donde R es una constante universal que toma el siguiente valor:
Ecuación de estado del gas ideal
R = 8,31J
mol ·K= 0,082
atm ·`mol ·K
≈ 2cal
mol ·K. (7.21)
Todo gas que cumpla la ecuación (7.20) y que además verifique que su energíainterna es sólo función de la temperatura se le denomina gas ideal. Un gas realse comporta como ideal (es decir, pV /nT es igual a la constante R) cuando supresión tiende a cero o su temperatura tiene a infinito.
Teniendo en cuenta que el número de moles es igual a N /NA , siendo N elnúmero total de moléculas y NA = 6,022×1023 moléculas/mol el número de Avo-gadro, la ecuación de estado del gas ideal puede escribirse como
pV = N kB T (7.22)
donde kB = R/NA = 1,38 ×10−23 J/K es la constante de Boltzmann.
A partir de la ecuación (7.20) se pueden obtener una serie de conclusiones:
Dos gases en igualdad de condiciones de presión, volumen y temperatura tie-nen igual número de moléculas (o de moles). Esto de conoce como Ley de Avo-gadro.
A igualdad de presión y temperatura, el volumen ocupado por un mol de gasideal es el mismo para todos los gases ideales. En particular, en condicionesnormales (0ºC y 1 atm), 1 mol de gas ideal ocupa 22,39`.
A una temperatura dada, la densidad de un gas es proporcional a la presión.
7.7.2. Propiedades termodinámicas del gas ideal
Energía interna del gas ideal
Las propiedades termodinámicas del gas ideal se derivan en gran parte de ladependencia exclusiva de su energía interna con la temperatura. Para demostrarque la energía interna no depende del volumen ni de la presión, Joule ideó el si-guiente experimento: supongamos el aparato representado en la figura adjunta.Inicialmente el compartimento de la izquierda contiene un gas, mientras que enel de la derecha se ha hecho el vacío. Ambos están conectadas por una llave de pa-so inicialmente cerrada. El sistema completo está térmicamente aislado del me-dio mediante unas paredes rígidas que no permiten el intercambio de calor nila realización de ningún trabajo entre el sistema y el exterior. Cuando se abre lallave, el gas se expande bruscamente en su tendencia a ocupar la cámara vacía.Este proceso se denomina expansión libre. Finalmente, el gas alcanza el equili-brio térmico consigo mismo. Se mide la temperatura final y es igual a la inicial.Puesto que no se ha realizado ningún trabajo sobre el gas ni se le ha transferido
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
7.7. El gas ideal 209
ningún calor, la energía interna final del gas debe ser igual a la energía internainicial. Como la presión y el volumen del gas han variado, mientras que la tempe-ratura permanece constante, Joule llegó a la conclusión de que para cualquier gasla energía interna depende sólo de la temperatura. Otros experimentos confirma-ron este resultado para gases a densidades bajas. Esto implica que en el caso de ungas a baja densidad (es decir, un gas ideal) la energía interna depende únicamentede la temperatura:
U =U (T ) . (7.23) Energía interna de un gas ideal
Capacidades caloríficas de los gases ideales
La determinación de la capacidad calorífica de una sustancia proporciona in-formación sobre su energía interna, que está relacionada a su vez con su estruc-tura molecular. En el caso de todas las sustancias que se dilatan al calentarse, lacapacidad calorífica a presión constante Cp es mayor que la capacidad caloríficaa volumen constante Cv . Si se suministra calor a presión constante, la sustanciase expande y realiza un trabajo positivo (sobre el medio). Por lo tanto, se necesitamás calor para obtener un cambio de temperatura dado a presión constante quepara obtener el mismo cambio de temperatura calentando a volumen constante.La expansión es normalmente despreciable en el caso de los sólidos y los líqui-dos, de modo que para ellos Cp ≈ Cv . Sin embargo, cuando un gas se calienta apresión constante, se dilata fácilmente y realiza un trabajo importante, de modoque Cp −Cv no es despreciable. Desde el punto de vista matemático, estas capa-cidades caloríficas se definen como
Cp =(
dQ
dT
)p
Cv =(
dQ
dT
)V
. (7.24)
Cuando se añade calor a una gas a volumen constante, éste no realiza trabajo(W = 0), de modo que, según la Primera Ley (7.13),
dU = dQ +���*0
dW = dQ
y, por tanto,
Cv =(
dQ
dT
)V=
(∂U
∂T
)V
. (7.25)
En el caso de un gas ideal, como U =U (T ), las derivadas parciales respecto ala temperatura se reducen a una derivada total; esto es,(
∂U
∂T
)P=
(∂U
∂T
)V= dU
dT(7.26)
por lo que, para un gas ideal, haciendo uso de (7.25) y (7.26), se tiene que
Cv = dU
dT(7.27)
y, si Cv es constante, se puede integrar trivialmente la ecuación anterior para ob-tener
∆U =Cv∆T . (7.28)
Calculemos ahora la diferencia Cp −Cv para un gas ideal. Para un proceso apresión constante, dQ =Cp dT . Según la Primera Ley (7.13),
dU = dQ +dW → Cv dT =Cp dT −pdV (7.29)
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
210 Tema 7. Termodinámica
donde hemos hecho uso de la ecuación (7.27). La presión, el volumen y la tempe-ratura de un gas ideal están relacionados por la ecuación de estado (7.20), pV =nRT . Diferenciando esta ecuación, teniendo en cuenta que p y n son constantes,se tiene
pdV = nRdT .
Sustituyendo esta expresión en (7.29) obtenemos
Cp dT =Cv dT +nRdT = (Cv +nR)dT .
Identificando los términos que multiplican a dT , se obtiene finalmente que
Cp −Cv = nR . (7.30)Relación de Mayer
7.8. Segunda Ley de la Termodinámica
Todos los procesos que se dan en la Naturaleza ocurren de una manera tal quemuestran una clara dirección en su evolución; esto es, suceden en una direccióndada pero no en la contraria. Si un sistema experimenta una transformación es-pontánea, no es posible devolverlo a su estado original sin que esto implique ungasto energético de alguna forma. Para recuperar el estado original del sistemahabría que actuar sobre él desde el exterior, y es por ello por lo que se dice que losprocesos naturales son irreversibles.4 Por ejemplo, en un proceso espontáneo, elflujo de calor siempre va de un cuerpo caliente a uno frío, y nunca al revés. Cier-tamente podemos conseguir que el flujo de calor vaya del frío al caliente, pero elproceso no sería entonces espontáneo dado que se necesitaría un aporte de tra-bajo externo adicional como ocurre en un frigorífico (que debe estar conectadoa la red eléctrica). No obstante, debemos notar que el flujo de calor espontáneode un cuerpo frío a uno caliente no violaría la Primera Ley de la Termodinámicaya que, suponiendo el intercambio de calor con el entorno despreciable, lo únicoque se tendría que cumplir es que el calor que sale de un cuerpo sea igual al que setransmite al otro. No obstante, este tipo de procesos espontáneos no se observanen la naturaleza.
Igualmente observamos a nuestro alrededor que resulta fácil convertir la ener-gía mecánica en calor. Un objeto en movimiento terminará parándose debido alrozamiento y al final la totalidad de su energía mecánica se habrá transferido almedio en forma de calor. No obstante, el proceso contrario no ocurre. Podemosconvertir parcialmente el calor en energía mecánica, como ocurre en el motor deun automóvil, donde el calor generado por la combustión de la gasolina muevelos pistones, pero resulta imposible construir una máquina que convierta la tota-lidad de ese calor en energía mecánica. Siempre hay parte del calor que se pierdepor transferencia con el entorno. No obstante, de nuevo, la primera ley de la Ter-modinámica no nos dice nada de esta aparente “asimetría” de la naturaleza.
Imaginemos otro ejemplo. Tenemos inicialmente una baraja de cartas orde-nadas y procedemos a mezclarlas (barajarlas). El resultado es ciertamente unabaraja en la que las cartas están colocadas aleatoriamente. De nuevo encontra-mos que el proceso contrario no ocurre, si partimos de una baraja desordenada,al mezclarla obtenemos de nuevo una baraja desordenada (teóricamente habría
4 Existen algunos procesos que tienen lugar muy lentamente y con pérdidas por rozamiento muypequeñas. Si suponemos que el proceso es cuasiestático sin rozamiento se denomina reversible y,por supuesto, es una idealización ya que ningún proceso real lo es.
Apuntes de Física 1 JCM,FLML

CopiaUso
Académico
7.8. Segunda Ley de la Termodinámica 211
alguna posibilidad de que apareciese ordenada, pero para conseguirlo habría querepetir el experimento tantas veces que, por rozamiento, nos quedaríamos sin ba-raja antes de lograrlo). Por supuesto que podemos reordenar la baraja, pero paraello tendremos que dedicar bastante tiempo y energía a dicha tarea. El procesono es espontáneo. Algo parecido ocurre cuando consideramos el aire en una ha-bitación. Teóricamente existe una posibilidad de que, debido a su movimiento,las moléculas de la mezcla de gases que componen el aire de la sala se concentrende forma espontánea en un extremo de la habitación, de manera que las personasque se encuentren en ella mueran asfixiadas (afortunadamente, esto no sucede).
Estos ejemplos y muchos más muestran la necesidad de formular una nuevaley que se les pueda aplicar. Esta ley se conoce como “Segunda Ley de la Termo-dinámica” y nos dice que todos los procesos naturales ocurren en una direccióndeterminada, y para su cuantificación debemos introducir una nueva función deestado, denominada entropía, S. Si un sistema a temperatura T absorbe una can-tidad infinitesimal de calor, dQ, durante un proceso reversible, esto da lugar a uncambio infinitesimal de entropía dado por
dS = dQ
T. (7.31)
El cambio de entropía, ∆S, de un sistema que sufre una transformación desde elestado “1” al estado ‘2” mediante un proceso reversible puede entonces calcularsecomo
∆S =∫ 2
1
dQ
T. (7.32)
Debemos notar que este cambio de entropía no depende del tipo de transforma-ción sufrida sino solo del estado inicial y del final (dado que S era una función deestado). Una consecuencia directa de la definición anterior es que
El cambio de entropía de un sistema que realiza un ciclo es nulo,
esto es,
∆Sciclo =∮
dQ
T= 0 . (7.33)
A partir del concepto de entropía podemos formular la Segunda Ley de la Ter-modinámica de la siguiente manera:
En cualquier proceso natural (irreversible) la entropía del universoaumenta.
Por entropía del universo se entiende la entropía del sistema que experimenta elproceso sumada a la variación de entropía del resto del universo, que básicamen-te será la de su entorno. Debemos notar que la entropía de un sistema concretosí puede disminuir, como ocurre con la entropía de una baraja desordenada queordenamos, pero si añadimos a esta disminución el aumento de entropía que pro-ducimos en el proceso de ir cogiendo las cartas una a una y colocarlas en orden,el balance total es que la entropía del universo aumenta. El origen y desarrollo deun organismo vivo es un ejemplo de un sistema en el que la entropía disminuye,pero a costa de aumentar la entropía del resto de universo debido a que necesitaconsumir y transformar energía de su entorno. Al final, la Segunda Ley condicionatodos los procesos, incluyendo los biológicos, de manera que la entropía total deluniverso siempre aumenta.
Una formulación alternativa de esta ley nos dice que, en un sistema aisla-do (no puede intercambiar nada con su entorno) sólo son posible procesos que
JCM,FLML Apuntes de Física 1

CopiaUso
Académico
212 Tema 7. Termodinámica
hagan que su entropía aumente.5 El aumento de entropía condiciona todos losproceso naturales. Por ejemplo, al mezclar agua caliente y fría conseguimos aguatemplada. Si no las hubiéramos mezclado, al tener dos fuentes de agua a distin-ta temperatura podríamos haberlas aprovechado para construir un artefacto quecogiera calor del agua caliente, parte lo convirtiera en energía eléctrica y el restodel calor se lo diera al agua fría (por ejemplo mediante un proceso termoeléctricobasado en el efecto Seebeck). El agua templada nunca se separará espontánea-mente en fría y caliente, la segunda ley de la Termodinámica lo prohíbe, y habre-mos perdido esa posibilidad. No hay disminución de energía cuando se mezclanesas dos corrientes, pero sí disminuye la oportunidad de aprovechar esa energía,en definitiva, su disponibilidad. Con esa magnitud está relacionada la entropía, ypor ello su estudio es tan importante en Ingeniería, Bioingeniería, etc.
5 Como caso límite, en un proceso reversible la entropía del universo permanece constante.
Apuntes de Física 1 JCM,FLML


















