Active Damping of Suspension Bridges - : : STC IPPT...
33
Active Damping of Suspension Bridges A. Preumont, D. Alaluf , B. Mokrani Université Libre de Bruxelles, Brussels, Belgium AIA15 Warsaw October, 15th , 2015 1
Transcript of Active Damping of Suspension Bridges - : : STC IPPT...

Active Damping of Suspension Bridges
A. Preumont, D. Alaluf , B. Mokrani
Université Libre de Bruxelles, Brussels, Belgium
AIA15Warsaw
October, 15th , 2015
1

Contents
•Motivation•Theory of decentralized IFF control of cable-structures•Space structures (numerical simulation)•Space structures (experiment)•Gamma ray telescope MAGIC•Cable-stayed bridge •Suspension bridge•Conclusion
2

Cable-stayed bridge
Suspension bridge

Stay cables in suspension bridges

Auperin, M., Dumoulin, C., Proc. 3rd Int. Workshopon Structural Control (Paris 6-8 July 2000)
Motivation
5

Decentralized Collocated IFF control of cable structures
6
Maximumachievabledamping:
A.PREUMONT: Vibration Control of Active Structures, 3rd Edition, Springer 2011

Recovering static stiffness: The “Beta” controller
7
Beta Controller:IFF Controller:High-pass
filter
Unconditionally stable if:

JPL Microprecision Interferometer testbed (simulation)
2 mmKevlar cables
14%
16%
21%
8

ULB free floating truss
9

ULB free floating truss Active tendon
10

ULB free floating truss(Theory vs. Experiment)
11

MAGIC – Major Atmospheric Gamma-ray Imaging Cherenkov Telescope
12
Focal length:17 mMirror diameter :17 m Camera Mass: 0.75 tTotal Mass:72 tMirror support: CFR tubesCamera Mast – Stiffened byprestressed cables
M. SMRZ, et al. Active Damping of the Camera Support Mast of a Cherenkov Gamma Ray Telescope, Nuclear Instruments and Methods in Physics Research, A 635 (2011)

Magic Telescope
13
Step response at the camera with 4 active cables
Structural model
Camera
Active cablesconfiguration

14
Cable-stayed bridge« ACE » project (2000)Laboratory experiment

15
« ACE » projectCable-stayed bridge
Sweep-sine excitation
Envelope of the deckdisplacement for various gains
Cable-stayed bridge« ACE » project (2000)
Large scale test (JRC-ELSA)

Auperin, M., Dumoulin, C., Proc. 3rd Int. Workshopon Structural Control (Paris 6-8 July 2000)
Suspension bridge
16

Suspension bridge: Seriate footbridge (45°40'18.5"N 9°43'45.2"E)
17

8 pedestrians walking on the bridge (measurement point 3)
4 joggers on the bridge (measurement point 5)
3 5
Amax=1.8 m/s2
Amax=4 m/s2
18

63.5 m
h=15.6 m
8 m
1.33 m
80.1°
F.E. model of the Seriate bridge
Main cables: D=60 mmHangers: D=16 mm
19

20

Option 1: Four active steel cables of diameter 10 mm between the pylon and the deck
21

Option 2: Active cables attached to the catenary
22

23
MSc students Andrea Sangiovanni and Matteo Voltan, from Politecnico di Milano (2015)

Schematic view of the laboratory mock-up
The tension in the hanger is adjustedfrom the measured natural frequency:
Optical device for measuring f
24

Mock-up with4 active tendons
25
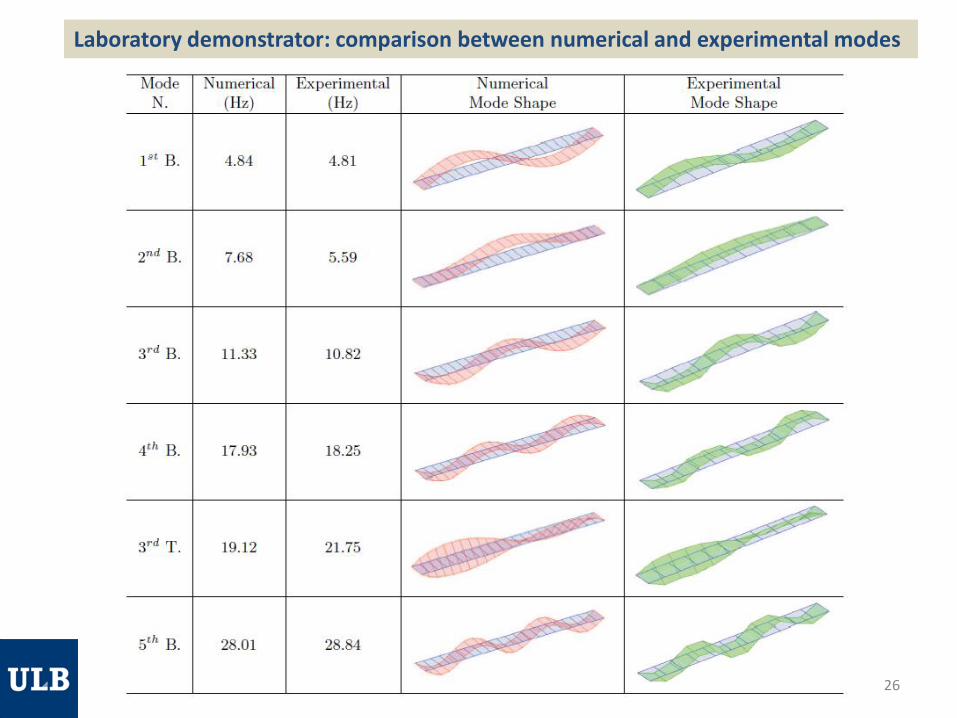
Laboratory demonstrator: comparison between numerical and experimental modes
26

Open-loop Transfer FunctionThe two curves refer to different
Natural frequencies of the active cable
27

28
Response to disturbance, z/f with a single loop of control
Cumulative RMS
FRF

Response with a single control loop:Evolution of the RMS response (z) and the
RMS control input (v) with the control gain g
29

Response with a single control loop:Root locus reconstruction and comparison with the approximate theory
30

31
Decentralized control with Four independent loopsReponse to disturbance z/f (FRF and cumulative RMS)
No spillover !

Conclusions
• Decentralized active tendon control of cable-structures is possible.
• Simple prediction formulae based on linear models may be used for design.
• The simple performance prediction formulae are supported by experiments.
• The static stiffness deficiency of the IFF can be recovered by high –pass filtering.
• A highly effective control of a suspension bridge may be obtained with few and
small active control cables which do not have to withstand the dead loads.
32

33
Acknowledgements
Prof. Carmelo Gentile from Politecnico di Milano (Italy) for sharing with us the data and the experimental modal analysis of the Seriate Bridge.Prof. Mihaita Horodinca from « Gheorghe Asachi » university of IASI (Romania)for his help in the construction of the bridge laboratory mock-up.MSc students Andrea Sangiovanni and Matteo Voltan, from Politecnico di Milano for conducting the experimental study of the bridge mock-up.





![IPPT slides (NEW).pptx [Read-Only] - Nanyang Polytechnic · 2020. 6. 16. · Under the new programme, all comba fit enlistees who have attained at least the IPPT Gold , Silver or](https://static.fdocuments.in/doc/165x107/5fc8a0fe667c153bda4cd80d/ippt-slides-newpptx-read-only-nanyang-2020-6-16-under-the-new-programme.jpg)